Способ аппроксимации редактируемой поверхности и устройство для его осуществления
Формула / Реферат
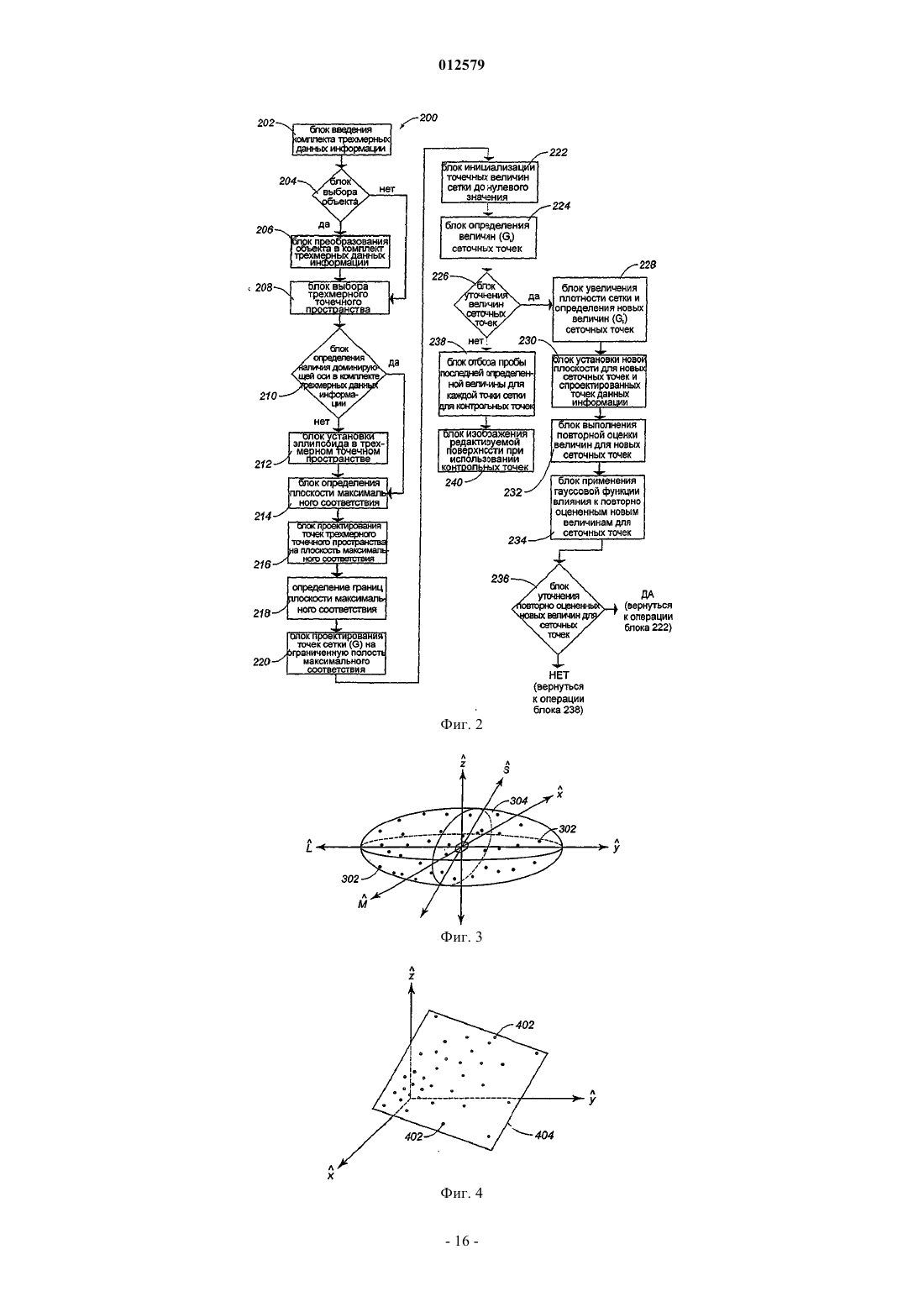
1. Способ аппроксимации редактируемой поверхности из комплекта трехмерных данных информации, содержащий следующие операции:
выбор трехмерного точечного множества из комплекта трехмерных данных информации;
определение плоскости наилучшего соответствия для упомянутого трехмерного точечного множества;
проецирование по меньшей мере части точек из трехмерного точечного множества на плоскость наилучшего соответствия;
определение границы для плоскости наилучшего соответствия согласно спроецированному трехмерному точечному множеству;
проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки;
инициализацию точек сетки;
определение значения по меньшей мере для части точек сетки;
выбор по меньшей мере части точек сетки с упомянутым значением;
формирование изображения редактируемой поверхности посредством использования по меньшей мере части выбранных точек сетки.
2. Способ по п.1, в котором трехмерное точечное множество содержит произвольную поверхность.
3. Способ по п.2, дополнительно содержащий следующие операции:
вписывание эллипсоида в трехмерное точечное множество и
определение доминирующей оси для трехмерного точечного множества на основании упомянутого эллипсоида.
4. Способ по п.3, при котором доминирующую ось используют для определения плоскости наилучшего соответствия.
5. Способ по п.1, при котором трехмерное точечное множество содержит одно из комплекта трехмерных данных информации и части комплекта трехмерных данных информации.
6. Способ по п.1, при котором плоскость наилучшего соответствия определяется посредством доминирующей оси для трехмерного точечного множества.
7. Способ по п.1, при котором границу плоскости наилучшего соответствия определяют множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве.
8. Способ по п.1, при котором спроецированная сетка основана на заранее определенных параметрах сетки.
9. Способ по п.1, при котором каждую точку сетки определяют пересечением на сетке.
10. Способ по п.1, при котором точки сетки инициализируют нулевыми значениями.
11. Способ по п.1, при котором значение точки сетки определяют посредством одной или более точек в спроецированном трехмерном точечном множестве в пределах заранее определенной области точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до точки сетки.
12. Способ по п.1, при котором редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности.
13. Способ по п.1, при котором редактируемая поверхность является поверхностью, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS).
14. Способ по п.1, дополнительно содержащий следующие операции:
уточнение упомянутого значения для по меньшей мере части упомянутой по меньшей мере части точек сетки;
выбор по меньшей мере части точек сетки на основании одного из упомянутого значения и уточненного значения.
15. Способ по п.14, дополнительно содержащий этап замены упомянутого значения уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением.
16. Способ по п.1, дополнительно содержащий этап преобразования комплекта трехмерных данных информации в трехмерное точечное множество.
17. Способ аппроксимации редактируемой поверхности из трехмерного точечного множества, содержащий следующие операции:
определение плоскости наилучшего соответствия для трехмерного точечного множества;
проецирование трехмерного точечного множества на плоскость наилучшего соответствия;
определение границы для плоскости наилучшего соответствия в соответствии с трехмерным точечным множеством;
проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки;
инициализацию точек сетки нулевыми значениями;
определение значения для точек сетки;
уточнение упомянутого значения для по меньшей мере части точек сетки;
выбор по меньшей мере части точек сетки на основании одного из упомянутого значения и упомянутого уточненного значения;
формирование изображения редактируемой поверхности посредством использования выбранных точек сетки, при этом редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности.
18. Способ по п.17, при котором плоскость наилучшего соответствия определяют посредством доминирующей оси для трехмерного точечного множества.
19. Способ по п.17, при котором границу плоскости наилучшего соответствия определяют посредством множества экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве.
20. Способ по п.17, при котором спроецированная сетка основана на заранее определенных параметрах сетки.
21. Способ по п.17, при котором каждую точку сетки определяют пересечением на сетке.
22. Способ по п.17, при котором упомянутое значение точки сетки определяют посредством одной или более точек в спроецированном трехмерном точечном множестве в границах заранее определенной области точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до точки сетки.
23. Способ по п.17, при котором редактируемая поверхность является поверхностью, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS).
24. Способ по п.17, дополнительно содержащий операцию замены упомянутого значения упомянутым уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением.
25. Способ по п.22, в котором уточнение упомянутого значения содержит следующие операции:
формирование новой сетки посредством увеличения плотности сетки, при этом новая сетка содержит множество новых точек сетки; определение значения для новых точек сетки; вписывание новой плоскости для новых точек сетки;
проведение повторной оценки упомянутого значения для новых точек сетки; сглаживание упомянутого значения для новых точек сетки.
26. Способ по п.25, дополнительно содержащий следующие операции:
инициализацию новых точек сетки нулевым значением;
определение нового значения для новых точек сетки.
27. Способ по п.26, при котором упомянутое новое значение точки сетки определяют посредством одной или более точек в трехмерном точечном множестве в пределах другой заранее определенной области новой точки сетки и расстояния от каждой точки в другой заранее определенной области до новой точки сетки, при этом другая заранее определенная область меньше, чем упомянутая заранее определенная область.
28. Способ по п.26, дополнительно содержащий этап повторения этапов по п.25.
29. Способ по п.25, в котором этап повторной оценки упомянутого значения для новых точек сетки содержит замену каждого значения новой точки сетки в пределах заранее определенной области повторно оцененным новым значением точки сетки.
30. Способ по п.25, дополнительно содержащий этап уточнения значений новых точек сетки.
31. Способ по п.25, дополнительно содержащий этап повторения одного или более этапов п.25.
32. Система для аппроксимации редактируемой поверхности из комплекта трехмерных данных информации, содержащая считываемую компьютером запоминающую среду, конфигурированную для хранения программы инструкций, причем при выполнении программные инструкции осуществляют
выбор трехмерного точечного множества из комплекта трехмерных данных информации;
определение плоскости наилучшего соответствия для трехмерного точечного множества;
проецирование по меньшей мере части точек из трехмерного точечного множества на плоскость наилучшего соответствия;
определение границы для плоскости наилучшего соответствия в соответствии со спроецированным трехмерным точечэыь множеством;
проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки;
инициализацию точек сетки;
определение значения для по меньшей мере части точек сетки;
выбор по меньшей мере части точек сетки с упомянутым значением и
формирование изображения редактируемой поверхности посредством использования по меньшей мере части выбранных точек сетки.
33. Система по п.32, в которой трехмерное точечное множество содержит произвольную поверхность.
34. Система по п.33, дополнительно содержащая следующие этапы:
вписывание эллипсоида в трехмерное точечное множество;
определение доминирующей оси для трехмерного точечного множества на основании эллипсоида.
35. Система по п.34, в которой доминирующая ось используется для определения плоскости наилучшего соответствия.
36. Система по п.32, в которой трехмерное точечное множество содержит одно из комплекта трехмерных данных информации и части комплекта трехмерных данных информации.
37. Система по п.32, в которой плоскость наилучшего соответствия определяется доминирующей осью для трехмерного точечного множества.
38. Система по п.32, в которой граница плоскости наилучшего соответствия определяется множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве.
39. Система по п.32, в которой спроецированная сетка основана на заранее определенных параметрах сетки.
40. Система по п.32, в которой каждая точка сетки определена пересечением на сетке.
41. Система по п.32, в которой точки сетки инициализированы нулевыми значениями.
42. Система по п.32, в которой значение точки сетки определяется посредством одной или более точек в спроецированном трехмерном точечном множестве в пределах заранее определенной области упомянутой точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до упомянутой точки сетки.
43. Система по п.32, в которой редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности.
44. Система по п.32, в которой редактируемая поверхность является поверхностью представленной рациональной совокупности последовательных неоднородных сложно-профильных кривых (NURBS).
45. Система по п.32, которая дополнительно включает следующие операции:
уточнение упомянутого значения для по меньшей мере части упомянутой по меньшей мере части точек сетки;
выбор по меньшей мере части точек сетки на основании одного из упомянутого значения и упомянутого уточненного значения.
46. Система по п.45 дополнительно содержит этап замены упомянутого значения упомянутым уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением.
47. Система по п.32, дополнительно содержащая этап преобразования комплекта трехмерных данных информации в трехмерное точечное множество.
48. Система для аппроксимации редактируемой поверхности из трехмерного точечного множества, содержащая считываемую компьютером запоминающую среду и конфигурированную для хранения программы инструкций, причем при выполнении программные инструкции выполняют
определение плоскости наилучшего соответствия для трехмерного точечного множества;
проецирование трехмерного точечного множества на плоскость наилучшего соответствия;
определение границы для плоскости наилучшего соответствия в соответствии с трехмерным точечным множеством;
проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки;
инициализацию точек сетки нулевыми значениями;
определение значения для точек сетки;
уточнение упомянутого значения для по меньшей мере части точек сетки;
выбор по меньшей мере части точек сетки на основе одного из упомянутого значения и уточненного значения и
формирование изображения редактируемой поверхности посредством использования выбранных точек сетки, причем редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности.
49. Система по п.48, в которой плоскость наилучшего соответствия определена доминирующей осью для трехмерного точечного множества.
50. Система по п.48, в которой граница плоскости наилучшего соответствия определена множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве.
51. Система по п.48, в которой спроецированная сетка основана на заранее определенных параметрах сетки.
52. Система по п.48, в которой каждая точка сетки определена пересечением на сетке.
53. Система по п.48, в которой значение для точки сетки определяется посредством одной или более точек в спроецированном трехмерном точечном множестве в границах заранее определенной области точки сетки и расстояния от каждой точки в заранее определенной области до точки сетки.
54. Система по п.48, в которой редактируемая поверхность является поверхностью, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS).
55. Система по п.48, дополнительно осуществляющая замену упомянутого значения упомянутым уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением.
56. Система по п.53, в которой уточнение значения содержит
формирование новой сетки посредством увеличения плотности сетки, при этом новая сетка содержит множество новых точек сетки;
определение значения для новых точек сетки;
вписывание новой плоскости в новые точки сетки;
проведение повторной оценки упомянутого значения для новых точек сетки и
сглаживание упомянутого значения для новых точек сетки.
57. Система по п.56, дополнительно содержащая следующие операции:
инициализацию новых точек сетки нулевыми значениями;
определение нового значения для новых точек сетки.
58. Система по п.57, в которой значение новой точки сетки определяют посредством одной или более точек в трехмерном точечном множестве в пределах другой заранее определенной области новой точки сетки и расстояния от каждой точки в упомянутой другой заранее определенной области до новой точки сетки, при этом упомянутая другая заранее определенная область меньше, чем упомянутая заранее определенная область.
59. Система по п.57, дополнительно выполненная с возможностью повторения этапов по п.56.
60. Система по п.56, в которой этап повторной оценки упомянутого значения для новых точек сетки содержит замену каждого значения новой точки сетки в пределах упомянутой заранее определенной области повторно оцененным новым значением точки сетки.
61. Система по п.56, дополнительно содержащая этап уточнения значений новых точек сетки.
62.Система по п.61, дополнительно содержащая этап повторения одного или более этапов по п.56.

Текст
012579 Область техники, к которой относится изобретение Настоящее изобретение вообще относится к системам и способам, предназначенным для автоматической аппроксимации редактируемой поверхности по комплекту трехмерных данных информации или по трехмерному точечному множеству, которая может изображаться в виде поверхности, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых(NURBS). Предпосылки для создания настоящего изобретения Рациональная совокупность последовательных неоднородных сложно-профильных кривых(NURBS) является стандартным используемым в промышленности техническим средством для топологического представления и проектирования. Рациональная совокупность последовательных неоднородных сложно-профильных кривых (NURBS), как пояснено Маркусом Альтманом в публикации AboutNonuniform Rational B-Splines - NURBS, используется по многим причинам. Неоднородные рациональные В-сплайны предлагают одну общую математическую форму как для стандартных аналитических форм (например, для конических сечений), так и для свободных форм. Рациональная совокупность последовательных неоднородных сложно-профильных кривых (NURBS) обеспечивает гибкостью рабочих операций при выполнении проектирования большого множества форм и может оцениваться рационально быстро по численно устойчивым и точным алгоритмам. Неоднородные рациональные В-сплайны являются инвариантными как под воздействием аффинных преобразований, так и под воздействием аксонометрических преобразований и представляют собой обобщения неоднородных рациональных Всплайнов и нерациональных и рациональных кривых и поверхностей Безье. Однако, один из недостатков неоднородных рациональных В-сплайнов (NURBS) состоит в необходимости наличия дополнительного запоминающего устройства для определения традиционных форм(например, кругов). Это приводит к дополнительному контролированию точек по параметрам, но при этом необходимо допускать наличие желаемой гибкости для определения параметрических форм. Формы неоднородных рациональных В-сплайнов (NURBS) определяются не только контрольными точками; также необходимо иметь веса, связанные с контрольными точками. Кривая С(u) неоднородных рациональных В-сплайнов, которая, например, является векторно оцениваемой фрагментарной рациональной полиномной функцией, может быть определена как:Ni,k - нормализованные основные функции В-сплайна. В-сплайны определяются рекуррентно как: и /1, если величина величины ti меньше или равна величине u, которая меньше, чем величина ti+1,при этом величина Ni,0(u) больше или равна 0, а иначе величины ti, являются узлами, образующими узловой вектор, и U=t0,t1,tm. Узловой вектор. Узловой вектор уникально определяет В-сплайны, как указано выше в отношении уравнения (2). Соотношение между количеством узлов (m+1), степенью (k) величины Ni,k и количеством контрольных точек (n+1) задается равенством m=n+k+1. Предполагается, что последовательность узлов в узловом векторе не является уменьшающейся, т.е. величина ti меньше или равна величине ti+1. Каждая последующая пара узлов представляет собой интервал [ti, ti+1) для параметрических величин с целью вычисления параметров отрезка формы. Для рациональных В-сплайнов (NURBS) относительные параметрические интервалы (узловой промежуток) не обязательно являются одними и теми же для всех отрезков формы, т.е. разнесение в узловом пространстве не является однородным, что приводит к непериодическому узловому вектору в виде: где величины а и b повторяются с многократностью k+1. Многократность повторения узла влияет на параметрическую непрерывность на этом узле. Непериодические рациональные В-сплайны, подобно рациональной совокупности последовательных неоднородных сложно-профильных кривых (NURBS), бесконечно и непрерывно дифференцируются в промежутке узлового интервала и (k-М-1) раз непрерывно дифференцируются в узле, где величина M является многократностью повторяемости узла. В противоположность этому, периодический узловой векторU=0, 1, n везде непрерывно (k-1) раз дифференцируется. Рассматривая узловой вектор рациональной совокупности последовательных неоднородных сложно-профильных кривых (NURBS), можно заметить,что конечные узловые точки (tk, tn+i) с (к+1)-разовой многократностью совпадают с конечными контроль-1 012579 ными точками P0, Pn. В виду того, что дистанционирование узлов может быть неоднородным, рациональные В-сплайны больше не являются одними и теми же для каждого интервала (ti, ti+i), и степень рационального Всплайна может изменяться. Учитывая в целом весь диапазон изменения параметрических величин, представленный узловым вектором, различные рациональные В-сплайны строят непрерывные (перекрывающиеся) функции Ni,k(U) смешивания, как это определено уравнением (2), по этому диапазону изменения параметрических величин, что иллюстрируется далее на фиг. 11. Эти функции смешивания имеют следующие свойства: 1. величина Ni,k(u) больше или равна=0 для всех значений величин i, k, u; 2. величина Ni,k(u)=0, если значение величины и не находится внутри интервала (ti,ti+k+i), что означает наличие местного опирания пролетов узла k+1 там, где величина Ni,k(u) не является нулевой по своему значению; 3. если величина u находится внутри интервала (ti, ti+k+i), тогда величины Ni-k, k(u), Ni,k(u) являются неисчезающими функциями смешивания; 4. Sum(j=i-k, i)Nj,k(u)=sum(i=0, n)Ni,k(u)=1, (разбиение единицы); и 5. в случае наличия множественных узлов, значение величины 0/0 считается равной нулю. Первое и четвертое свойства, как проиллюстрировано на фиг. 12 ниже, совместно в результате приводят к выпуклому корпусу. Ломаная линия контрольных точек нарастает до формы, определяемой кривой для рациональных В-сплайнов (NURBS). Второе и третье свойства иллюстрируют условия того, что последовательные точки контролирования k+1 раз определяют отрезок формы, и контрольная точка включается k+1 соседних отрезков формы. Поэтому изменение контрольной точки или веса влияет только на k+1 отрезков формы, определенных по интервалу, заданному в уравнении (2). Определение кривой/поверхности. Ранее представленное в уравнении (1) определение NURBS-кривой может быть повторно записано при подстановке рациональных основных функций: в уравнение: Поверхность, представленная рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS), может определяться аналогичным путем: где Рациональные основные функции имеют такие же свойства как функции смешивания. Одним пунктом, который необходимо подчеркнуть, является то, что в наличии имеется их инвариантность под воздействием аффинных и (даже) аксонометрических преобразований. Следовательно, только контрольные точки должны трансформироваться для того, чтобы получать соответствующее преобразование формы поверхности, представленной рациональной совокупностью последовательных неоднородных сложнопрофильных кривых (NURBS). Вычислительный алгоритм. Рациональная совокупность последовательных неоднородных сложно-профильных кривых(NURBS) может быть эффективно оценена с помощью использования однородных координат. Один из способов выполнения оценки демонстрируется следующими действиями: 1. необходимо добавить одно размерение к контрольным точкам (например, Р=(х, у) стремится к Р'(х, у, 1, и следует умножить их на соответствующие им веса, т.е. при двухмерности имеем: Pi(xi,yi) стремится к Pi(wixi, wi,yi, wi); 2. необходимо рассчитывать рациональные В-сплайны (NURBS) в однородных координатах: 3. следует отображать (map) однородные рациональные В-сплайны (NURBS) обратно в первоначальной системе координат:/(X1/W, X2/W, , Xn/W), если значение величины W не равно нулю,map (Х 1, X2,Xn, W)(Х 1, Х 2, , Xn), если значение величины W равно нулю. Для величины u, находящейся внутри интервала [ti, ti+i), единственными существующими функциями смешивания для расчетов при оценке кривой в районе величины и являются Ni-k,k(u), , Ni, k(u). Эффек-2 012579 тивный алгоритм для вычисления неисчезающих функций смешивания описан в публикации С. deBoor С, "A Practical Guide to Splines." 1978, New York, Springer-Verlag. Веса. Как упомянуто выше, изменение веса wi контрольной точки Pi влияет только на диапазон интервала[ti, t i+k+i) (в случае наличия кривой). Геометрические значение весов иллюстрируется на фиг. 13, приведенной ниже. Определение точек: В=C(u; wi=0);Bi=C(u; wi не находится в интервале 0,1). Величины N и Bi могут быть выражены также как:b=Ri,k(u). Из выражения для величин а и b получается следующее тождественное равенство: которое называется перекрестным или удвоенным соотношением величин для четырех точек Pi, В,N, Bi. Из этих выражений может быть выявлено влияние видоизменения форм: точка Bi принимает различные значения на отрезке прямой линии; если значение величины wi равно нулю, тогда точка Pi не влияет на форму; если значение величины wi возрастает, тогда значение величины b и кривая вытягиваются в сторону точки Pi и оттесняются от точки Pj в том случае, если значение величины j не равно значению величины i; если значение величины wi уменьшается, тогда значение величины b и кривая оттесняются от точкиPi и вытягиваются в сторону точки Pj в том случае, если значение величины j не равно значению величины i; если значение величины wi стремится к бесконечности, тогда значение величины b стремится к единице, а точка Bi стремится к точке Pi, если значение величины и находится в интервале [ti, t i+k+l]. Проблема Предпринимались попытки использования различных технических приемов для создания поверхности рациональных В-сплайнов (NURBS) в различных отраслях техники. Например, в опубликованной Международной заявке WO 02/37422 и в патенте США 6765570, включенных в это описание изобретения в качестве ссылочного материала, предлагались различные технические приемы для создания вручную редактируемых поверхностей рациональных В-сплайнов (NURBS), используемых для анализа и интерпретации природных случаев сейсмического характера. При других обычных применениях предлагается построение редактируемых поверхностей рациональных В-сплайнов (NURBS) при использовании технических интерполяционных приемов, хорошо известных из существующего уровня техники. Такие технические приемы могут относиться к подходу к решению проблемы посредством точного соответствия с целью определения редактируемой поверхности. Подход к решению проблемы посредством точного соответствия является наиболее вероятным для представления менее униформной, если совсем не униформной, редактируемой поверхности по сравнению со способом аппроксимирования при максимальном соответствии редактируемой поверхности. Более того, подход к решению проблемы посредством точного соответствия для определения редактируемой поверхности рациональных В-сплайнов(NURBS) может быть неосуществимым, если его применение запрещается с точки зрения размера материальных издержек при наличии комплектов обширных трехмерных данных информации, часто встречающихся при анализе сейсмографических данных информации. Другие обычные способы преобразования неупорядоченных точек на поверхностях вообще описываются в публикации Shepard D., "A two dimensional interpolation function for irregular spaces data", 1968,pages 517-524, в трудах конференции Proceedings 23rd ACM National Conference. При одном хорошо известном способе интерполяции разбросанных точек определяется величина для поверхности, основанная на заданных точках и весовых функциях. Хотя результат является относительно грубым, основная идея вдохновляла на разработку множества других способов. Другой хорошо известный способ, вообще относящийся к сплайну тонкой пластины, был включен в отображения для использования в случаях медицинской практики и был способен точно направлять на целевую поверхность таким образом, чтобы она проходила через все задаваемые точки. См. публикацию Hardy R.L., Desmarrais R.N., "Interpolation using surface spline", 1972, pages 189-197, Journal ofAircraft, и публикацию Dyn N., "Interpolation in scattered Data by Radial Functions", 1987, pages 47-61, публикацию In Chui C.K., Schumaker L. L, Ultreres F. I.(редактор), Topics in Multivariate Approximation. Однако, этот технический прием требует инверсию больших матриц, он является дорогостоящим с точки зрения выполнения вычислений и вообще является непрактичным при большом количестве вводимых точек, которые могут потребовать использование аппроксимирования только для максимального соответ-3 012579 ствия. Другой обычный способ преобразования скопления точек в поверхность описывается в публикации Норре Н., et al., "Surface Reconstruction from Unorganized Points", 1992, pages 71-78, Comput. Graph. 26. Однако, при этом способе принимается допущение о том, что вводимые точки равномерно распределены по всей области, что также является непрактичным для исходных точек, которые плотно размещены в некоторых областях и отсутствуют в других областях. Следовательно, существует потребность в автоматическом аппроксимировании поверхности по набору трехмерных данных информации или по трехмерному точечному множеству, содержащему большой объем неупорядоченных и /или бесструктурных точек данных информации, которые могут отображаться в виде редактируемой поверхности рациональной совокупности последовательных неоднородных сложно-профильных кривых (NURBS). Сущность настоящего изобретения Настоящее изобретение отвечает выше упомянутым потребностям и устраняет один или большее количество недостатков при существующем уровне техники в данной области посредством разработки систем и способов автоматической аппроксимации редактируемой поверхности по комплекту трехмерных данных информации или по трехмерному точечному множеству, которые могут содержать большой объем бесструктурных и/ или неупорядоченных точек данных информации. При одном варианте воплощения настоящее изобретение включает в себя способ аппроксимации редактируемой поверхности из проекции трехмерного точечного множества на плоскость наилучшего соответствия для этого трехмерного точечного множества, содержащий следующие операции: i) проецирование сетки на плоскость наилучшего соответствия в пределах заранее определенной границы, при этом сетка содержит множество точек сетки; ii) инициализация точек сетки; iii) выбор по меньшей мере части точек сетки с заранее определенным значением, причем выбранные точки сетки определяют точки управления; iv) формирование изображения редактируемой поверхности посредством использования по меньшей мере части точек управления. При этом способ дополнительно содержит следующие операции: вписывание эллипсоида в трехмерное точечное множество; и определение доминирующей оси для трехмерного точечного множества на основании упомянутого эллипсоида, причем доминирующую ось используют для определения плоскости наилучшего соответствия, а заранее определенную границу на плоскости наилучшего соответствия определяют множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве. В упомянутом способе каждую точку сетки определяют пересечением на сетке, а значение заранее определенной точки сетки определяет посредством одной или более точек в спроецированном трехмерном точечном множестве в пределах заранее определенной области точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до точки сетки. Способ дополнительно может содержать следующие операции: уточнение упомянутого заранее определенного значения по меньшей мере для части упомянутой по меньшей мере части точек сетки с заранее определенным значением; выбор по меньшей мере части точек сетки на основании одного из упомянутого заранее определенного значения и уточненного значения, замену упомянутого заранее определенного значения уточненным значением для точек сетки, выбранных с упомянутым заранее определенным значением и упомянутым уточненным значением. При этом уточнение упомянутого заранее определенного значения содержит следующие операции: формирование новой сетки посредством увеличения плотности сетки, при этом новая сетка содержит множество новых точек сетки; определение значения для новых точек сетки; вписывание новой плоскости для новых точек сетки; проведение повторной оценки упомянутого значения для новых точек сетки; сглаживание упомянутого значения для новых точек сетки. При другом варианте воплощения настоящее изобретение включает в себя систему для аппроксимации редактируемой поверхности из проекции трехмерного точечного множества на плоскость наилучшего соответствия для этого трехмерного точечного множества, содержащую считываемую компьютером запоминающую среду, конфигурированную для хранения программы инструкций, причем при выполнении программные инструкции осуществляют: i) проецирование сетки на плоскость наилучшего соответствия в пределах заранее определенной границы, при этом сетка содержит множество точек сетки; ii) инициализацию точек сетки; iii) выбор по меньшей мере части точек сетки с заранее определенным значением, при этом выбранные точки сетки определяют точки управления; iv) формирование изображения редактируемой поверхности посредством использования по меньшей мере части точек управления. При этом в системе трехмерное точечное множество содержит произвольную поверхность, доминирующая ось используется для определения плоскости наилучшего соответствия, а плоскость наилучшего соответствия определяется доминирующей осью для трехмерного точечного множества. В упомянутой системе заранее определенная граница на плоскости наилучшего соответствия определяется множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве, а спроецированная сетка основана на заранее определенных параметрах сетки. При этом заранее определенное значение точки сетки определяется посредством одной или более точек в спроецированном трехмерном точечном множестве в пределах заранее определенной области упомянутой точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до упомянутой точки сетки. Ре-4 012579 дактируемая поверхность может представлять собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности, редактируемая поверхность является поверхностью, представленной рациональной совокупностью последовательных неоднородных сложнопрофильных кривых (NURBS). В заявленной системе выполняется уточнение заранее определенного значения для по меньшей мере части упомянутой по меньшей мере части точек сетки с заранее определенным значением; и выбор по меньшей мере части точек сетки на основании одного из заранее определенного значения и упомянутого уточненного значения. Эти и другие объекты, признаки и преимущества настоящего изобретения станут очевидными для специалистов в данной области техники из рассмотрения последующего описания различных вариантов воплощения изобретения, имеющего сопроводительные чертежи. Краткое описание чертежей Настоящее изобретение описано ниже со ссылкой на сопроводительные чертежи, на которых одни и те же элементы обозначены одними и теми же числовыми позициями, и на этих чертежах фиг. 1 - блок-схема, иллюстрирующая один из вариантов выполнения программы для реализации настоящего изобретения; фиг. 1 А - принципиальная схема, иллюстрирующая поток данных информации в модуле для аппроксимации, иллюстрированном на чертеже, изображенном на фиг. 1; фиг. 2 - блок-схема потоков данных информации, иллюстрирующая один из вариантов воплощения способа, реализующего настоящее изобретение; фиг. 3 иллюстрирует рабочую операцию 212, блок выполнения которой представлен на фиг. 2; фиг. 4 - рабочие операции 216 и 218, блоки выполнения которых, представлены на фиг. 2; фиг. 5 - рабочие операции 220 и 222, блоки выполнения которых представлены на фиг. 2; фиг. 5 А - рабочую операцию 224, блок выполнения которой представлен на фиг. 2 и представляет собой участок А, показанный на фиг. 5; фиг. 6 иллюстрирует рабочие операции 228, 230 и 232, блоки выполнения которых представлены на фиг. 2; фиг. 7 - рабочие операции 236 и 238, блоки выполнения которых представлены на фиг. 2; фиг. 8 является графическим изображением, иллюстрирующим вводимые точки данных информации, использованные для аппроксимирования редактируемой поверхности, отображаемой графически при рабочей операции 240, иллюстрированной на фиг. 2; фиг. 9 является другой аксонометрической проекцией участка графического отображения, представленного на фиг. 8; фиг. 10 является другой аксонометрической проекцией участка графического отображения, представленного на фиг. 9. фиг. 11 показывает непрерывные (перекрывающиеся) плавно сопрягающиеся функции разных Всплайнов по диапазону значений параметров. фиг. 12 - свойства плавно сопрягающихся функций фиг. 11, приводящих к выпуклой оболочке. фиг. 13 - геометрическое значение весов, приложенных к опорным точкам. Подробное описание настоящего изобретения Объект настоящего изобретения описывается со спецификой, однако, само по себе описание не направлено на ограничение объема правовой защиты настоящего изобретения. Таким образом, заявляемый объект изобретения может быть реализован другими путями для включения различных рабочих операций или их комбинаций, подобных тем, которые описываются здесь ниже, в сочетании с другими существующими в настоящее время или будущими технологиями. Более того, хотя термин "рабочая операция" может быть использован здесь для того, чтобы обозначать по-разному элементы используемых методов, термин не должен интерпретироваться как подразумевающийся каким-либо конкретным распоряжением и назначенный среди или между различных рабочих операций, здесь ниже описанных, не считая и исключая тот случай, когда назначение конкретных рабочих операций описано явным образом. Настоящее изобретение обеспечивает наличием усовершенствованной системы и усовершенствованного способа, предназначенных для осуществления анализа наборов трехмерных данных информации и/или трехмерных точечных множеств. Изобретение может быть описано в обобщенном контексте программы инструкций, выполняемых компьютером, таких как программные модули, программы которых реализуются компьютером. Вообще, программные модули включают в себя режимы, программы, объекты, структуры данных информации и пр., которыми выполняются конкретные задачи или которые снабжают особыми типами абстрактных данных информации. Сверх того, для специалистов в данной области техники будет понятно, что изобретение может практически реализовываться посредством множества компьютерно-системных конфигураций, включая в себя портативные приборы, микропроцессорные системы, электронные устройства, основанные на микропроцессорах или программируемые пользователями, мини-компьютеры, большие электронно-вычислительные машины и т.п. Любое количество систем вычислительных машин и сети вычислительных машин являются приемлемыми для использования при реализации настоящего изобретения. Изобретение может практически реализовываться в распределенной вычислительной среде, в кото-5 012579 рой задачи выполняются посредством дистанционных устройств для обработки, которые связаны между собой с помощью сети передачи данных информации. В распределенной вычислительной среде программные модули могут размещаться как в местной, так и в дистанционно размещенной запоминающей памяти ЭВМ, включающей в себя запоминающие устройства. Команды, используемые с помощью компьютера, образуют интерфейс для того, чтобы позволять компьютеру реагировать в соответствии с источником введения команд. Команды взаимодействуют с другими кодовыми сегментами для инициирования начала выполнения задач при реагировании на данные информации, получаемые во взаимодействии с источником принимаемых вводимых данных информации. Настоящее изобретение, следовательно, может быть осуществлено посредством использования аппаратного оборудования, программных средств или при комбинации их друг с другом в компьютерной системе или в другой обрабатывающей системе. На чертеже, изображенном на фиг. 1, показана блоксхема, иллюстрирующая один из вариантов реализации программы 100 программного обеспечения для осуществления настоящего изобретения. В основу программы 100 заложена операционная система 102. Пригодная для этого операционная система 102 может включать в себя, например, операционную систему Windows, выпускаемую корпорацией Майкрософт, или другие операционные системы, которые являются очевидными для специалиста в данной области техники. Программное обеспечение 104 управления окнами и меню накладывается на операционную систему 102. Программное обеспечение 104 управления окнами и программное средство режима меню используются для обеспечения наличием множества меню и окон для облегчения диалога с пользователем и для получения команд и данных информации, вводимых пользователями. Для специалиста в данной области техники вполне очевидным является то, что любое количество программ программного средства режима меню и любое количество программ программного обеспечения управления окнами может быть использовано в сочетании с настоящим изобретением. Основная графическая библиотека 106 накладывается на программное обеспечение 104 управления окнами и программное средство режима меню. Основная графическая библиотека 106 является прикладным программным интерфейсом (API) для компьютерной графики. Функции, выполняемые основной графической библиотекой 106, могут включать в себя, например, геометрические и растровые простейшие элементы, режим использования цветов красный-зеленый-синий или режим индексирования цветов, дисплейный перечень или быстродействующий режим, трансформации обзора и моделирования,освещение и ретуширование, устранение невидимых поверхностей, взвешенное наложение цветов текстуры и фона (полупрозрачность), очистка от искажений, наложение текстуры, обратная связь и выбор,плоскости для узора по трафарету и буфер накопления. Устройство 108 для воспроизведения накладывается на основную графическую библиотеку 106. Как будет понятно для специалиста в данной области техники, устройство 108 для воспроизведения может включать в себя комплект инструментов для двумерной/трехмерной интерпретации данных сейсмической информации, включающих в себя интерактивное контролирование границы раздела и сдвигов,трехмерную визуализацию и анализ характеристик. Например, платформа SeisVision, изготовленная корпорацией Landmark Graphics Corporation, является средством сейсмического воспроизведения, предназначенным для использования при реализации настоящего изобретения. Модуль аппроксимации 110 является налагающимся на другие элементы программы 100. Модуль аппроксимации 110 конфигурирован для того, чтобы осуществлять взаимодействие с комплектами трехмерных данных информации, представляющими собой предопределенные объекты и такие, как, например, границы раздела и сдвиги или трехмерные точечные множества, содержащие точки произвольных и/или неструктурированных данных информации. Тем способом, который вообще хорошо известен в данной области техники, модуль 110 аппроксимирования согласуется с выполняемыми функциями и использует их, а также взаимодействует и использует устройство 108 для воспроизведения, основную графическую библиотеку 106, программное обеспечение 104 управления окнами с программным средством режима меню и операционную систему 102. Модуль 110 аппроксимирования может быть записан в объекте, ориентированном на язык программирования и такой, как, например, C, для того, чтобы создавать и использовать объекты и их функциональную связь. Программа 100, иллюстрированная на чертеже, изображенном на фиг. 1, может исполняться или осуществляться посредством использования компьютерной системы, включающей в себя программу 100 и различные компоненты аппаратного обеспечения. Компоненты аппаратного обеспечения могут включить в себя, например, процессор, запоминающее устройство (например, запоминающее устройство с произвольной выборкой и/или энергонезависимые запоминающие устройства), одно или большее количество устройств для введения данных информации, одно или большее количество устройств индикации и одно или большее количество интерфейсных устройств. Эти компоненты аппаратного обеспечения могут быть связаны между собой в соответствии со множеством конфигураций. Энергонезависимые запоминающие устройства могут включать в себя, например, накопители на магнитной ленте, дисковое запоминающее устройство, полупроводниковое постоянное запоминающее устройство (ROM) или электрически перепрограммируемое постоянное запоминающее устройство (EEPROM). Устройства для вве-6 012579 дения данных информации могут включать в себя, например, такие устройства, как клавиатура, мышь,планшетный цифратор, шаровое устройство для ввода графической информации, сенсорный планшет и/или световое перо. Дисплейные устройства индикации могут включать в себя, например, такие устройства, как мониторы, проекторы и/или шлемы виртуальной реальности. Интерфейсные устройства могут быть конфигурированы для того, чтобы оказались востребованными цифровые графически отображаемые данные информации от одного или большего количества накопительных устройств и/или от одного или большего количества компьютеров или запоминающих устройств через вычислительную сеть. Любое множество различных накопительных устройств может использоваться в зависимости от типа объекта, подлежащего графическому изображению. Накопительное(ые) устройство(а) могут воспринимать различные формы механической энергии (например, акустической энергии, перемещения, и/или усилия/силового напряжения) и/или электромагнитной энергии (например, световой энергии, энергии радиоволн, электрического тока и/ или напряжения). Процессор может быть конфигурирован для того, чтобы осуществлять перепрограммирование команд и/или данных информации от запоминающего устройства с произвольной выборкой и/или энергонезависимых запоминающих устройств и сохранять результаты вычислений в запоминающем устройстве с произвольной выборкой и/или в энергонезависимых запоминающих устройствах. Программные команды направляются к процессору для включения в работу комплектов трехмерных данных информации и/или комплектов точек из их трехмерного точечного множества, основываясь на способах, которые содержатся ниже в этом описании. Вводимые данные информации могут обеспечиваться в компьютерной системе посредством использования множества механизмов. Например, вводимые данные информации могут накапливаться в энергонезависимом запоминающем устройстве и/или в запоминающем устройстве с произвольной выборкой посредством применения одного или большего количества интерфейсных устройств. При другом примере использования изобретения вводимые данные могут подаваться в компьютерную систему посредством такой среды запоминающих устройств, как диск или лента, которые загружаются в или на одно из энергонезависимых запоминающих устройств. В этом случае вводимые данные информации должны предварительно записываться в среде запоминающих средств. Следует отметить, что вводимыми данными информации не могут обязательно быть необработанные данные информации от датчиков, получаемые накопительным устройством. Например, вводимые данные информации могут получаться в результате одной или большего количества рабочих операций обработки при использовании комплекта необработанных данных информации от датчиков. Рабочая(ие) операция(ии) по обработке могут выполняться компьютерной системой и/или одним или большим количеством других компьютеров. Способ, реализуемый согласно настоящему изобретению, может осуществляться в одной или в большем количестве программ или модулей программного обеспечения, которые хранятся в любом множестве различных средств запоминания и таких, как постоянное запоминающее устройство на компакт-дисках, магнитный диск, память на цилиндрических магнитных доменах, полупроводниковое запоминающее устройство (например, при любом из различных типов запоминающих устройств с произвольной выборкой или постоянных запоминающих устройств). Кроме того, программа(ы) программного обеспечения и/или результаты их использования могут передаваться через множество различных средств носителей, таких как оптическое волокно, металлическая проволока, свободное пространство и/ или посредством любого разнообразия множества сетей, таких как Интернет. На фиг. 1, например, набор 112 трехмерных данных информации может содержать любой заранее определенный предмет и такой, как например, геонарушения, геотела, границы раздела, сдвиги и/или другие поверхности или любой трехмерный точечный комплект, содержащий произвольные и/или неструктурированные точки данных информации. Трехмерный комплект 112 данных информации может при необходимости преобразовываться в трехмерный точечный комплект 114. Весь трехмерный точечный комплект 114 или его часть могут выбираться из преобразуемого трехмерного комплекта 112 данных информации при обработке с помощью модуля 110 аппроксимирования для получения графического отображения редактируемой поверхности. Обращая теперь внимание на чертеж, изображенный на фиг. 2, можно видеть, что на нем иллюстрируется реализация способа 200 аппроксимирования графического изображения редактируемой поверхности по трехмерному комплекту данных информации или по трехмерному точечному множеству. При рабочей операции 202 трехмерный комплект (набор) данных информации может использоваться для введения предопределенных объектов или трехмерных точечных множеств, содержащих точки произвольных и/или неструктурированных данных информации. При выполнении рабочей операции 204 объект может выбираться из трехмерного комплекта данных информации и такого, как, например, геонарушения, геотела, границы раздела, сдвиги и/или другие поверхности. Такие объекты могут быть предопределены предварительно посредством использования ряда технических приемов графического изображения, хорошо известных из существующего уровня техники в данной е области. При выполнении рабочей операции 206 выбранный объект преобразуется в трехмерный комплект(набор) точек посредством использования технических приемов преобразования, хорошо известных из-7 012579 существующего уровня техники в данной е области. Преобразованный трехмерный точечный комплект содержит точки произвольных и/или неструктурированных данных информации, соответствующих точкам начальных данных информации, содержащих исходный вводимый трехмерный комплект данных информации. Следовательно, трехмерный комплект точек может содержать точки произвольных и/или неструктурированных данных информации, образующие произвольную поверхность. При выполнении рабочей операции 208 трехмерный точечный комплект может выбираться из начального комплекта трехмерных данных информации (см. описание выполнения рабочей операции 202) или из преобразованного комплекта трехмерных данных информации (см. описание выполнения рабочей операции 206), который может содержать все точки данных информации из начального комплекта трехмерных данных информации или из его части. Таким образом, выбранный трехмерный точечный комплект содержит точки произвольных и/или неструктурированных данных информации, соответствующие, по крайней мере, части точек начальных данных информации, содержащей начальный комплект трехмерных данных информации. При выполнении рабочей операции 210 трехмерный точечный комплект, выбранный при выполнении рабочей операции 208, подвергается анализу для определения вопроса о том, содержится ли в нем доминирующая (длинная) ось. Если доминирующая ось может быть определена для трехмерного точечного комплекта, нет необходимости в выполнении следующей рабочей операции 212. Для определенных предварительно установленных объектов, выбранных при выполнении рабочей операции 204, доминирующая ось может легко различаться любым специалистом в данной области техники. При выполнении рабочей операции 212 строится эллипсоид 304 для трехмерного точечного комплекта (точечного трехмерного сгустка), иллюстрируемый на чертеже, изображенном на фиг. 3, с помощью технического средства для программирования, хорошо известного из уровня техники в данной области. Трехмерный точечный комплект представляется точками 302 данных информации. Эллипсоид 304 включает в себя три главные оси, которые могут быть обозначены как длинная ось ( ), средняя ось ( ) и короткая ось ( ). В случае идеальной окружности, однако, все три главные оси будут иметь одну и ту же длину. Короткий осевой вектор эллипсоида 304 сравнивается с мировыми координатными осями (х, y,z) определения первоначального направления плоскости максимального соответствия, и поэтому следующие три представления должны использоваться для определения плоскости максимального соответствия при выполнении рабочей операции 214: При выполнении рабочей операции 214 плоскость максимального соответствия определяется посредством использования аппроксимации по способу наименьших квадратов для получения уравнения,определяющего собой плоскости максимального соответствия. Например, допустим что Т является матрицей n точек данных информации, содержащей трехмерный точечный комплект таким образом, что Допустим, что М является матрицей 44, сформированной посредством TT', где Т' является транспозицией матрицы Т. При использовании способа наименьших квадратов уравнение для плоскости максимального соответствия получается посредством инверсии матрицы М и путем декомпозиции LU, что дает возможность получения коэффициентов А, В, С и D в следующем уравнении, которое может быть использовано для определения плоскости максимального соответствия для точек 302 данных информации, содержащихся в трехмерном точечном комплекте: При выполнении рабочей операции 216, по крайней мере, участок точек 302 данных информации,содержащий трехмерный точечный комплект, проецируется на плоскость 404 максимального соответствия, показанную на чертеже, изображенном на фиг. 4, с помощью использования программирующего средства, хорошо известного из уровня техники в данной области. Чем больше точек 302 данных информации проецируется на плоскость 404 максимального соответствия, тем более точные результаты могут-8 012579 быть получены. При всем том количество точек 302 данных информации, проецируемых на плоскость 404 максимального соответствия, может быть определено как сущность предпочтительности. Точки 302 данных информации, спроецированные на плоскость 404 максимального соответствия, иллюстрируются как спроецированные точки 402 данных информации. Спроецированные точки 402 данных информации могут быть представлены в параметрической форме в виде z'=f (х', у'), где х', у', z' обозначают собой систему ортогональных координат плоскости 404 максимального соответствия, при этом координаты х', у' сопряжены с плоскостью 404 максимального соответствия, а координата z'является перпендикулярной плоскости 404 максимального соответствия. При выполнении рабочей операции 218, границы для плоскости 404 максимального соответствия определяются в соответствии с экстремумами, обозначающими самые удаленные от центра спроектированные точки 402 данных информации. На чертеже, изображенном на фиг. 4, плоскость 404 максимального соответствия иллюстрируется с границами, которые являются очевидными при рассмотрении самых удаленных от центра спроектированных точек 402 данных информации. При выполнении рабочей операции 220 сетка проецируется на ограниченную плоскость 404 максимального соответствия, иллюстрированную чертежом, изображенным на фиг. 5, с помощью использования технических средств программирования, известных из существующего уровня техники в данной е области. Сетка, спроецированная на плоскость 404 максимального соответствия, может быть представлена в виде NM, где N и М являются заранее определенными параметрами сетки. Заранее определенные параметры сетки (NМ) могут быть одними и теми же (N=М) или различными (параметр N не равен параметру М). При выполнении рабочей операции 222 инициализируется до нулевого значения каждая сеточная точка 502, определенная пересечением на сетке, изображенной на чертеже, показанном на фиг. 5. Таким образом, значение для сеточной точки может быть определено для каждой сеточной точки 502, иллюстрированной чертежом, изображенным на фиг. 5. При выполнении рабочей операции 224 значение для каждой точки сетки 502, иллюстрированный на чертеже, изображенном на фиг. 5, может быть определено посредством сканирования спроецированных точек 402 данных информации в заранее определенной предварительно области 5 А. Чем больше точек сетки, значение величин которых прошло оценку, тем более точными будут получаемые результаты. Тем не менее, количество точек сетки 502, подлежащих оценке по значениям своих величин, может быть определено как сущность предпочтительности. Заранее определенная область 5 А может содержать весь комплект спроецированных точек 402 на плоскость 404 максимального соответствия. Предварительно заранее определенная область 5 А может быть представлена предпочтительным количеством ячеек (узлов), соответствующих пространствам на сетке. Например, предпочтительное количество ячеек(узлов), равное 16, может быть представлено как 44 в предварительно предопределенной области 5 А,показанной на чертеже, изображенном на фиг. 5. В случае наличия альтернативы предпочтительное количество ячеек, равное 16, может быть представлено как 28 в предварительно заранее определенной области. Для каждой спроецированной точки 402 данных информации, находящейся в пределах предварительно предопределенной области 5 А, величина (Е,) для точки данных информации идентифицируется и записывается при соответствующем расстоянии (di) от точки сетки 502, что показано на чертеже, изображенном на фиг. 5 А. Величина (Gi) точки сетки для точки сетки 502 может быть определена по следующей нормализированной формуле распределения: где величина Gi представляет собой значение для величины точки сетки у каждого местоположения точки сетки 502, основанной на точечных величинах (Ei) данных информации для каждой спроецированной точки 402 данных информации, лежащей в пределах предварительно заранее определенной области 5 А при е расстоянии (di) относительно точки сетки 502, прошедшей оценку. Эта формула действительна для всех расстояний (di), которые не являются равными нулю. Для тех расстояний (di), которые являются равными нулю, величина Gi назначается точечная величина (Ei) данных информации по той причине, что е значение является точно известным. Таким образом, точечная величина Gi для сетки в случае точки сетки 502 определяется посредством использования каждой из точечных величин (E1, Е 2, Е 3, Е 4, Е 5) и их соответствующих расстояний (d1, d2, d3, d4, d5) до точки сетки 502, прошедшей оценку. Такая же процедура может быть применена для определения величин точек сетки для остальных точек сетки 502 посредством смещения предварительно предопределенной области 5 А таким образом, что каждая точка сетки 502, прошедшая оценку, находится на одном и том же месте внутри предварительно предопределенной области 5 А. Для точек сетки 502, которые находятся вблизи или на самих границах плоскости 404 максимального соответствия, величины для точек сетки определяются тем же самым способом за-9 012579 исключением того, что предварительно предопределенная область 5 А может частично находиться вне плоскости 404 максимального соответствия для того, чтобы поддерживать одно и то же положение точек сетки в пределах предварительно заранее определенной области 5 А. Соответственно этому отсутствуют спроецированные точки 402 данных информации, которые необходимо сканировать за пределами плоскости 404 максимального соответствия для учета при определении величины для точек сетки 502, лежащих вблизи или на самой границе плоскости 402 максимального соответствия. При выполнении рабочей операции 226 величины для точек сетки могут уточняться тем способом,который описан при выполнении рабочих операций 228-236 для всех, когда раз и навсегда определяются величины (Gi) для точек сетки. При выполнении рабочей операции 228 плотность сетки увеличивается (например, удваивается), и новые величины (Gi) для точек сетки линейно интерполируются между прежними точками сетки 502 посредством использования прежних величин (Gi) и технических приемов интерполяции, которые хорошо известны из существующего уровня техники в ее данной области. При выполнении рабочей операции 230 определяется множество новых плоскостей (максимального соответствия) посредством использования уравнений, составленных при описании выполнения рабочей операции 214, и предварительно предопределенной области, которая может быть той же самой, что и предварительно заранее определенная область 5 А, иллюстрированная на чертеже, изображенном на фиг. 5. Другими словами, у каждой спроецированной точки 402 данных информации определяется (рассчитывается) новая плоскость (максимального соответствия) для согласования спроецированных точек 402 данных информации и новых точек сетки в пределах окружающей предварительно предопределенной области. На чертеже, изображенном на фиг. 6, например, величина х' представляет собой инкрементное приращение в плотности сетки по сравнению с прежним шагом сетки. Следовательно, новая плоскость 602 (максимального соответствия) проходит через спроецированную точку 402 А данных информации и новую точку сетки 606 А в пределах окружающей предварительно заранее определенной области. Эта рабочая операция увеличивает точность интерполяции, выполняемой при осуществлении рабочей операции 228, и определяет новую плоскость (максимального соответствия) для каждой спроецированной точки 404 данных информации. При выполнении рабочей операции 232 новые интерполированные величины (Gi') для точек сетки могут проходить повторную оценку посредством замены каждой интерполированной новой точки сетки в пределах предварительно заранее определенной области прошедшей повторную оценку каждой интерполированной новой точкой сетки на основе средневзвешенной величины для всех новых точек сетки,которые становятся лежащими в новой плоскости (максимального соответствия), которая проходит через предварительно заранее определенную область и спроецированную точку данных информации, находящуюся в пределах предварительно заранее определенной области. На чертеже, изображенном на фиг. 6,например, повторно проходящая оценку величина для новой точки сетки 612 может определяться посредством замены е ранее интерполированной новой величины точки сетки средневзвешенной величиной для новых точек сетки 606 А, 606 В, которые соответственно оказываются лежащими в новых плоскостях 602, 606 (максимального соответствия), которые проходят через предварительно заранее определенную область и содержат соответственно спроецированные точки 402 А, 402 В данных информации. При выполнении рабочей операции 234, гауссова функция влияния может применяться к каждой из повторно оцениваемых новых величин для точек сетки для того, чтобы сглаживать в результате получающиеся новые величины для точек сетки таким образом, что они имели бы более естественную непрерывность. Гауссово сглаживание повторно оцениваемых новых величин для точек сетки может выполняться по способу, хорошо известному из уровня техники в ее данной области. Различные модификации процесса гауссова сглаживания могут быть очевидными для специалистов в данной области техники и при необходимости применяться для улучшения процесса сглаживания, здесь описываемого. При выполнении рабочей операции 236, по крайней мере, часть повторно оцениваемых новых величин для точек сетки может дополнительно уточняться посредством возврата к выполнению рабочей операции 222 и посредством повторения нескольких или всех рабочих операций, до сих пор осуществленных. При повторной рабочей интерполяционной операции 224, однако, предварительно определенная область 5 А инкрементно уменьшается таким коэффициентом, равным единице таким образом, что окружающая предварительно предопределенная область, подлежащая учету, может быть представлена как (4-1)(4-1). Если, однако, не уточняются повторно оцениваемые новые величины для сеточных точек, тогда процесс переходит к выполнению рабочей операции 238. Аналогично, если не уточняются повторно оцениваемые новые величины для точек сетки в соответствии с выполнением рабочей операции 236, процесс непосредственно может переходить к выполнению рабочей операции 238. При выполнении рабочей операции 238 значения величин для точек сетки и/или повторно оцениваемые новые величины для точек сетки могут подвергаться взятию пробы для контрольных точек. В процессе взятия проб просто выбирается последняя итерация процесса, описанного при выполнении рабочей операции 236 таким образом, что последняя определенная величина может выбираться в качестве контрольной точки. На чертеже, изображенном на фиг. 7, например, плоскость 700 (максимального соответствия) может включать в себя множество величин для точки сетки 702, которые могут быть представ- 10012579 лены как Gi, Gi2, Gi2 Gni. Аналогично, точки сетки 704, 706 и 708, например, могут иметь множество значений величин. Соответственно, последняя определенная величина для каждой точки сетки может быть выбрана для пробы (отобрана) в целом или частично для создания комплекта контрольных точек для аппроксимирования редактируемой поверхности, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS) при любой произвольной разрешимости. При выполнении рабочей операции 240 редактируемая поверхность может быть графически изображена (представлена) посредством использования по крайней мере части выбранных контрольных точек и воспроизведения технических приемов, общеизвестных для создания поверхности, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS). Чем больше количество контрольных точек, которые используются для графического изображения редактируемой поверхности, тем более точными оказываются получаемые результаты. Другими словами,более точное аппроксимирование для максимального соответствия редактируемой поверхности является возможным на основе количества выбранных используемых контрольных точек. Тем не менее количество контрольных точек, используемых для графического изображения редактируемой поверхности, может определяться как сущность предпочтительности. На чертеже, изображенном на фиг. 8, например, точки 802 входных данных информации и редактируемая поверхность 804 графически изображаются одновременно для того, чтобы иллюстрировать пространственную взаимозависимость между точками 802 данных информации, которые могут быть использованы в качестве исходных при выполнении рабочей операции 202 для того, чтобы осуществлять аппроксимирование редактируемой поверхности 804. Точки 802 данных информации содержат сейсмические данные информации, которые представляют собой предопределенный объект (кривые редактируемой поверхности), который может быть создан ручным способом, вообще описанным в опубликованной Международной заявкеWO 02/37422 и/или в патенте США 6765570. Разрешимость на выходе может улучшаться согласно различным хорошо известным техническим приемам воспроизведения сейсмичности, если это необходимо или предпочтительно. На чертеже, изображенном на фиг. 9, имеется графическое изображение, показанное на чертеже фиг. 8, которое редактируется для иллюстрации части точек 802 данных информации и соответствующей редактируемой поверхности 804, которые могут использоваться для интерпретации случаев сейсмичности. На чертеже, изображенном на фиг. 10, точки 802 данных информации удалены для показа только редактируемой поверхности 804, которая также может быть использована для интерпретации случаев сейсмичности. Следовательно, настоящее изобретение может использоваться для геофизического анализа данных информации о сейсмичности. Более того, настоящее изобретение может применяться в комбинации с одним или большим количеством системных компонентов, описанных в опубликованной Международной заявкеWO 02/37422 на патент и/или в патенте США 6765570, для создания редактируемой поверхности из множества точек данных информации о сейсмичности, которые могут включать в себя, например, координаты х, у, z и величину данных информации, представляющую собой предопределенный объект, такой как например, отложение одного возраста или сдвиг. Сейсмическое изображение, автоматически воспроизводимое в результате реализации настоящего изобретения, представляет собой редактируемую поверхность, представленную рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS), которая может в диалоговом порядке редактироваться и подвергаться манипуляциям с нею и которая может понижать отношение сигнал-помеха, предоставляемое точками исходных данных информации по сравнению с обычными техническими приемами, используемыми для создания поверхности, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS). Настоящее изобретение, однако, может также быть использоваться и для других комплектов трехмерных данных информации, например, для медицинских данных информации и для технических данных. Поэтому изобретением предусмотрено, что различные ситуации, видоизменения и/или модификации могут создаваться в раскрытых вариантах воплощения настоящего изобретения без отклонения от сущности и объема правовой охраны изобретения, которая осуществляется посредством прилагаемой формулы изобретения и его эквивалентов. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ аппроксимации редактируемой поверхности из комплекта трехмерных данных информации, содержащий следующие операции: выбор трехмерного точечного множества из комплекта трехмерных данных информации; определение плоскости наилучшего соответствия для упомянутого трехмерного точечного множества; проецирование по меньшей мере части точек из трехмерного точечного множества на плоскость- 11012579 наилучшего соответствия; определение границы для плоскости наилучшего соответствия согласно спроецированному трехмерному точечному множеству; проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки; инициализацию точек сетки; определение значения по меньшей мере для части точек сетки; выбор по меньшей мере части точек сетки с упомянутым значением; формирование изображения редактируемой поверхности посредством использования по меньшей мере части выбранных точек сетки. 2. Способ по п.1, в котором трехмерное точечное множество содержит произвольную поверхность. 3. Способ по п.2, дополнительно содержащий следующие операции: вписывание эллипсоида в трехмерное точечное множество и определение доминирующей оси для трехмерного точечного множества на основании упомянутого эллипсоида. 4. Способ по п.3, при котором доминирующую ось используют для определения плоскости наилучшего соответствия. 5. Способ по п.1, при котором трехмерное точечное множество содержит одно из комплекта трехмерных данных информации и части комплекта трехмерных данных информации. 6. Способ по п.1, при котором плоскость наилучшего соответствия определяется посредством доминирующей оси для трехмерного точечного множества. 7. Способ по п.1, при котором границу плоскости наилучшего соответствия определяют множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве. 8. Способ по п.1, при котором спроецированная сетка основана на заранее определенных параметрах сетки. 9. Способ по п.1, при котором каждую точку сетки определяют пересечением на сетке. 10. Способ по п.1, при котором точки сетки инициализируют нулевыми значениями. 11. Способ по п.1, при котором значение точки сетки определяют посредством одной или более точек в спроецированном трехмерном точечном множестве в пределах заранее определенной области точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до точки сетки. 12. Способ по п.1, при котором редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности. 13. Способ по п.1, при котором редактируемая поверхность является поверхностью, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых(NURBS). 14. Способ по п.1, дополнительно содержащий следующие операции: уточнение упомянутого значения для по меньшей мере части упомянутой по меньшей мере части точек сетки; выбор по меньшей мере части точек сетки на основании одного из упомянутого значения и уточненного значения. 15. Способ по п.14, дополнительно содержащий этап замены упомянутого значения уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением. 16. Способ по п.1, дополнительно содержащий этап преобразования комплекта трехмерных данных информации в трехмерное точечное множество. 17. Способ аппроксимации редактируемой поверхности из трехмерного точечного множества, содержащий следующие операции: определение плоскости наилучшего соответствия для трехмерного точечного множества; проецирование трехмерного точечного множества на плоскость наилучшего соответствия; определение границы для плоскости наилучшего соответствия в соответствии с трехмерным точечным множеством; проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки; инициализацию точек сетки нулевыми значениями; определение значения для точек сетки; уточнение упомянутого значения для по меньшей мере части точек сетки; выбор по меньшей мере части точек сетки на основании одного из упомянутого значения и упомянутого уточненного значения; формирование изображения редактируемой поверхности посредством использования выбранных точек сетки, при этом редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности. 18. Способ по п.17, при котором плоскость наилучшего соответствия определяют посредством доминирующей оси для трехмерного точечного множества.- 12012579 19. Способ по п.17, при котором границу плоскости наилучшего соответствия определяют посредством множества экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве. 20. Способ по п.17, при котором спроецированная сетка основана на заранее определенных параметрах сетки. 21. Способ по п.17, при котором каждую точку сетки определяют пересечением на сетке. 22. Способ по п.17, при котором упомянутое значение точки сетки определяют посредством одной или более точек в спроецированном трехмерном точечном множестве в границах заранее определенной области точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до точки сетки. 23. Способ по п.17, при котором редактируемая поверхность является поверхностью, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых(NURBS). 24. Способ по п.17, дополнительно содержащий операцию замены упомянутого значения упомянутым уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением. 25. Способ по п.22, в котором уточнение упомянутого значения содержит следующие операции: формирование новой сетки посредством увеличения плотности сетки, при этом новая сетка содержит множество новых точек сетки; определение значения для новых точек сетки; вписывание новой плоскости для новых точек сетки; проведение повторной оценки упомянутого значения для новых точек сетки; сглаживание упомянутого значения для новых точек сетки. 26. Способ по п.25, дополнительно содержащий следующие операции: инициализацию новых точек сетки нулевым значением; определение нового значения для новых точек сетки. 27. Способ по п.26, при котором упомянутое новое значение точки сетки определяют посредством одной или более точек в трехмерном точечном множестве в пределах другой заранее определенной области новой точки сетки и расстояния от каждой точки в другой заранее определенной области до новой точки сетки, при этом другая заранее определенная область меньше, чем упомянутая заранее определенная область. 28. Способ по п.26, дополнительно содержащий этап повторения этапов по п.25. 29. Способ по п.25, в котором этап повторной оценки упомянутого значения для новых точек сетки содержит замену каждого значения новой точки сетки в пределах заранее определенной области повторно оцененным новым значением точки сетки. 30. Способ по п.25, дополнительно содержащий этап уточнения значений новых точек сетки. 31. Способ по п.25, дополнительно содержащий этап повторения одного или более этапов п.25. 32. Система для аппроксимации редактируемой поверхности из комплекта трехмерных данных информации, содержащая считываемую компьютером запоминающую среду, конфигурированную для хранения программы инструкций, причем при выполнении программные инструкции осуществляют выбор трехмерного точечного множества из комплекта трехмерных данных информации; определение плоскости наилучшего соответствия для трехмерного точечного множества; проецирование по меньшей мере части точек из трехмерного точечного множества на плоскость наилучшего соответствия; определение границы для плоскости наилучшего соответствия в соответствии со спроецированным трехмерным точечным множеством; проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки; инициализацию точек сетки; определение значения для по меньшей мере части точек сетки; выбор по меньшей мере части точек сетки с упомянутым значением и формирование изображения редактируемой поверхности посредством использования по меньшей мере части выбранных точек сетки. 33. Система по п.32, в которой трехмерное точечное множество содержит произвольную поверхность. 34. Система по п.33, дополнительно содержащая следующие этапы: вписывание эллипсоида в трехмерное точечное множество; определение доминирующей оси для трехмерного точечного множества на основании эллипсоида. 35. Система по п.34, в которой доминирующая ось используется для определения плоскости наилучшего соответствия. 36. Система по п.32, в которой трехмерное точечное множество содержит одно из комплекта трехмерных данных информации и части комплекта трехмерных данных информации. 37. Система по п.32, в которой плоскость наилучшего соответствия определяется доминирующей- 13012579 осью для трехмерного точечного множества. 38. Система по п.32, в которой граница плоскости наилучшего соответствия определяется множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве. 39. Система по п.32, в которой спроецированная сетка основана на заранее определенных параметрах сетки. 40. Система по п.32, в которой каждая точка сетки определена пересечением на сетке. 41. Система по п.32, в которой точки сетки инициализированы нулевыми значениями. 42. Система по п.32, в которой значение точки сетки определяется посредством одной или более точек в спроецированном трехмерном точечном множестве в пределах заранее определенной области упомянутой точки сетки и расстояния от каждой точки в упомянутой заранее определенной области до упомянутой точки сетки. 43. Система по п.32, в которой редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности. 44. Система по п.32, в которой редактируемая поверхность является поверхностью представленной рациональной совокупности последовательных неоднородных сложно-профильных кривых (NURBS). 45. Система по п.32, которая дополнительно включает следующие операции: уточнение упомянутого значения для по меньшей мере части упомянутой по меньшей мере части точек сетки; выбор по меньшей мере части точек сетки на основании одного из упомянутого значения и упомянутого уточненного значения. 46. Система по п.45 дополнительно содержит этап замены упомянутого значения упомянутым уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением. 47. Система по п.32, дополнительно содержащая этап преобразования комплекта трехмерных данных информации в трехмерное точечное множество. 48. Система для аппроксимации редактируемой поверхности из трехмерного точечного множества,содержащая считываемую компьютером запоминающую среду и конфигурированную для хранения программы инструкций, причем при выполнении программные инструкции выполняют определение плоскости наилучшего соответствия для трехмерного точечного множества; проецирование трехмерного точечного множества на плоскость наилучшего соответствия; определение границы для плоскости наилучшего соответствия в соответствии с трехмерным точечным множеством; проецирование сетки на плоскость наилучшего соответствия в пределах упомянутой границы, при этом сетка содержит множество точек сетки; инициализацию точек сетки нулевыми значениями; определение значения для точек сетки; уточнение упомянутого значения для по меньшей мере части точек сетки; выбор по меньшей мере части точек сетки на основе одного из упомянутого значения и уточненного значения и формирование изображения редактируемой поверхности посредством использования выбранных точек сетки, причем редактируемая поверхность представляет собой приближение с наилучшим соответствием трехмерного точечного множества к редактируемой поверхности. 49. Система по п.48, в которой плоскость наилучшего соответствия определена доминирующей осью для трехмерного точечного множества. 50. Система по п.48, в которой граница плоскости наилучшего соответствия определена множеством экстремумов точек, содержащихся в спроецированном трехмерном точечном множестве. 51. Система по п.48, в которой спроецированная сетка основана на заранее определенных параметрах сетки. 52. Система по п.48, в которой каждая точка сетки определена пересечением на сетке. 53. Система по п.48, в которой значение для точки сетки определяется посредством одной или более точек в спроецированном трехмерном точечном множестве в границах заранее определенной области точки сетки и расстояния от каждой точки в заранее определенной области до точки сетки. 54. Система по п.48, в которой редактируемая поверхность является поверхностью, представленной рациональной совокупностью последовательных неоднородных сложно-профильных кривых (NURBS). 55. Система по п.48, дополнительно осуществляющая замену упомянутого значения упомянутым уточненным значением для точек сетки, выбранных с упомянутым значением и упомянутым уточненным значением. 56. Система по п.53, в которой уточнение значения содержит формирование новой сетки посредством увеличения плотности сетки, при этом новая сетка содержит множество новых точек сетки; определение значения для новых точек сетки; вписывание новой плоскости в новые точки сетки;- 14012579 проведение повторной оценки упомянутого значения для новых точек сетки и сглаживание упомянутого значения для новых точек сетки. 57. Система по п.56, дополнительно содержащая следующие операции: инициализацию новых точек сетки нулевыми значениями; определение нового значения для новых точек сетки. 58. Система по п.57, в которой значение новой точки сетки определяют посредством одной или более точек в трехмерном точечном множестве в пределах другой заранее определенной области новой точки сетки и расстояния от каждой точки в упомянутой другой заранее определенной области до новой точки сетки, при этом упомянутая другая заранее определенная область меньше, чем упомянутая заранее определенная область. 59. Система по п.57, дополнительно выполненная с возможностью повторения этапов по п.56. 60. Система по п.56, в которой этап повторной оценки упомянутого значения для новых точек сетки содержит замену каждого значения новой точки сетки в пределах упомянутой заранее определенной области повторно оцененным новым значением точки сетки. 61. Система по п.56, дополнительно содержащая этап уточнения значений новых точек сетки. 62. Система по п.61, дополнительно содержащая этап повторения одного или более этапов по п.56.
МПК / Метки
МПК: G01C 17/38
Метки: редактируемой, устройство, аппроксимации, поверхности, способ, осуществления
Код ссылки
<a href="https://eas.patents.su/19-12579-sposob-approksimacii-redaktiruemojj-poverhnosti-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Евразийского Союза">Способ аппроксимации редактируемой поверхности и устройство для его осуществления</a>
Способ ионной обработки поверхности диэлектрика и устройство для осуществления способа
Номер патента: 9514
Опубликовано: 28.02.2008
Авторы: Хисамов Айрат Хамитович, Хохлов Александр Евгеньевич, Марышев Сергей Павлович, Савенко Владимир Анатольевич, Левчук Николай Евгеньевич, Ширипов Владимир Яковлевич
МПК: C23C 14/35, C23C 14/48, H01J 37/317...
Метки: ионной, способ, способа, диэлектрика, устройство, поверхности, обработки, осуществления
Формула / Реферат:
1. Способ ионной обработки поверхности диэлектрика, включающий формирование направленного потока ионов и направленного потока электронов, воздействие ими на обрабатываемую поверхность диэлектрика, при этом поток электронов служит для нейтрализации положительного заряда, возникающего на поверхности диэлектрика, отличающийся тем, что поток электронов формируют с помощью плазменного катодного разряда и туннелеобразного магнитного поля, при этом...
Метод определения потенциала незаряженной поверхности твердого металлического электрода и устройство для его осуществления, способ и устройство для электрохимической защиты конструкционных металлов откоррозии.
Номер патента: 8848
Опубликовано: 31.08.2007
Автор: Косов Вильгельм Прохорович
МПК: C23F 13/00, C23F 13/04, G01R 29/24...
Метки: конструкционных, потенциала, осуществления, металлического, электрохимической, способ, откоррозии, защиты, электрода, незаряженной, поверхности, метод, устройство, металлов, твердого, определения
Формула / Реферат:
1. Способ определения потенциала незаряженной поверхности твердого металлического электрода, в котором измеряют величину стационарного потенциала металла, поляризуют электрическим током прямого и обратного направления, определяют момент установления потенциала незаряженной поверхности, отличающийся тем, что поляризацию электрода осуществляют периодическим током с разнополярными импульсами, а на этапах протекания прямого и обратного импульсов...
Установка для получения фильтрованного осадка из суспензии, способ регенерации поверхности ее фильтрующего элемента и устройство для его осуществления
Номер патента: 5511
Опубликовано: 24.02.2005
Авторы: Лебедев Николай Михайлович, Красный Борис Лазаревич, Бондарь Владимир Викторович, Дохов Руслан Кушбиевич, Саутин Андрей Геннадьевич, Воронин Олег Владимирович
МПК: B01D 33/44, B01D 29/62
Метки: осадка, поверхности, установка, получения, осуществления, суспензии, фильтрующего, регенерации, устройство, фильтрованного, способ, элемента
Формула / Реферат:
1. Установка для получения фильтрованного осадка из суспензии, содержащая резервуар (2) для суспензии, всасывающее сушильное устройство (1), связанный с ним, как минимум, один фильтрующий элемент (4) и расположенные вблизи него скребок (6) для отделения фильтрованного осадка и устройство регенерации поверхности фильтрующего элемента, содержащее средство создания ультразвука по меньшей мере с одним излучателем (9) и узел (7) промывки поверхности...
Электронно-интерференционный способ определения местоположения и типа молекулярных групп на поверхности биообъектов, в т. ч. на последовательностях нуклеотидов, и устройство для его осуществления
Номер патента: 12215
Опубликовано: 28.08.2009
Автор: Намиот Владимир Абрамович
МПК: G01N 27/00, G01N 33/483, G01N 21/00...
Метки: последовательностях, поверхности, устройство, местоположения, молекулярных, групп, определения, типа, биообъектов, способ, осуществления, нуклеотидов, электронно-интерференционный
Формула / Реферат:
1. Устройство для электронно-интерференционного определения местоположения и типа молекулярных групп на поверхности биообъектов, в т.ч. на последовательностях нуклеотидов, включающее основание из непроводящего материала, подложку, размещенную на основании, установленные на подложке фотокатод и анод, между которыми установлена площадка для размещения исследуемого объекта, фотокатод выполнен по меньшей мере с одним окном и участками из материала с...
Способ стерилизации поверхности предмета, устройство для его осуществления и установка для стерилизации бутылок
Номер патента: 597
Опубликовано: 29.12.1999
Автор: Сёгор Сёрен Петер
МПК: B65B 55/08
Метки: устройство, предмета, осуществления, стерилизации, бутылок, способ, установка, поверхности
Формула / Реферат:
1. Способ стерилизации поверхности предмета, выполненного из полимерного материала с заключительной обработкой горячей деформацией, такой как дутьевое формование или вакуумное формование, предусматривающий обработку высокочастотной электрической энергией, такой как микроволны, отличающийся тем, что - создают на предмете, по существу, непрерывную пленку жидкости путем нанесения на предмет жидкости, которая не отталкивается материалом, из...
Предыдущий патент: Носитель для доставки в нервные клетки
Следующий патент: Способ получения гетерофазной полиолефиновой композиции и полученная композиция
Случайный патент: Агонист глюкокортикоидного рецептора, включающий 2,2,4-триметил-6-фенил-1,2-дигидрохинолиновые производные, содержащие замещенную оксигруппу