Оптоэлектронное цифровое устройство для помощи оператору при определении положения стрельбы, придаваемого ручному гранатомету, для поражения движущейся цели и соответствующий способ эксплуатации



Формула / Реферат
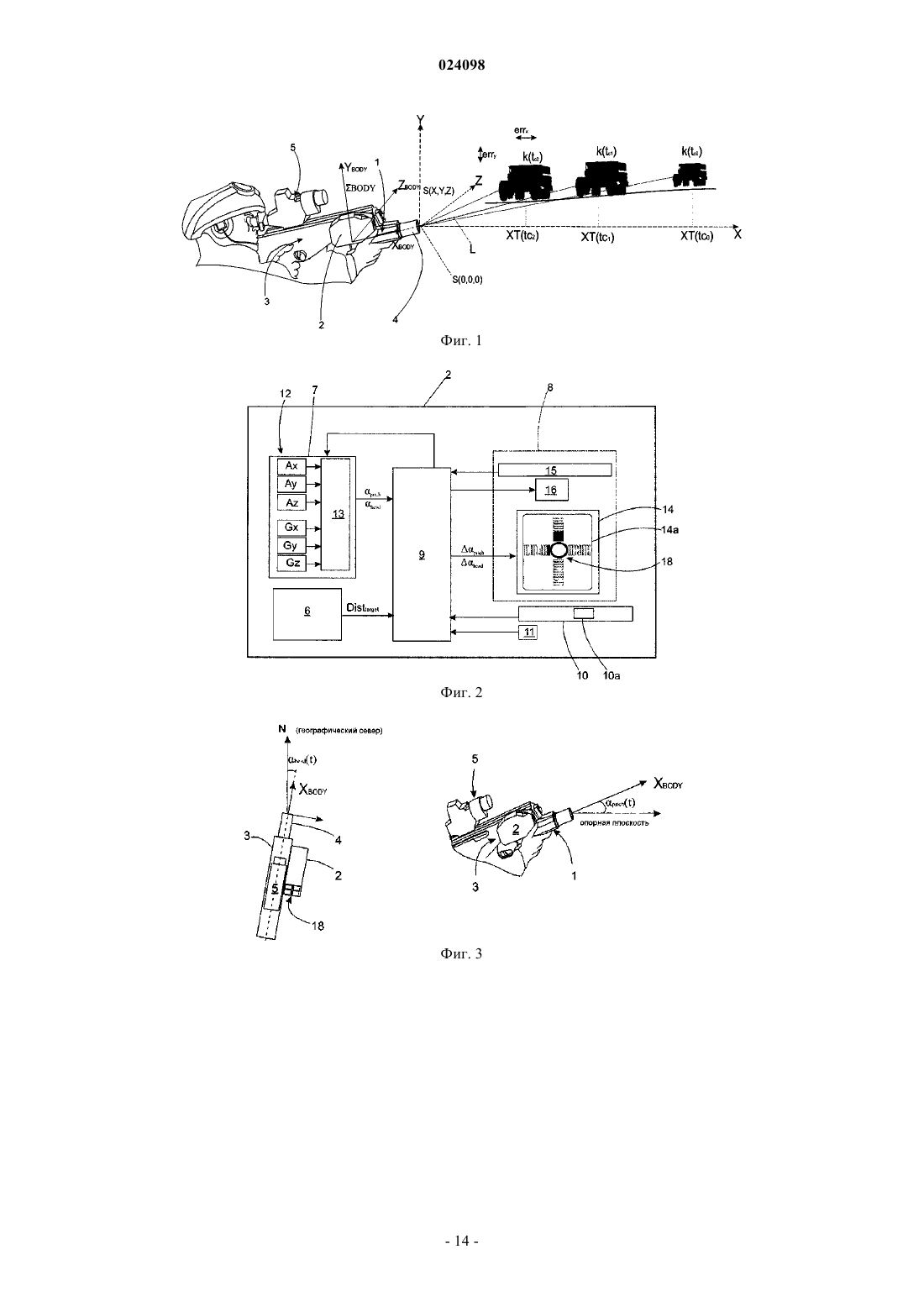
1. Оптоэлектронное цифровое устройство (2) для помощи оператору при определении положения стрельбы, придаваемого ручному гранатомету (1), для поражения движущейся цели (k) гранатой, причем упомянутое устройство (2) содержит
электронные средства (6), (7) измерения, выполненные с возможностью измерять угол тангажа (αpitch), угол курса (αhead), указывающие положение гранатомета (1), и расстояния (Disttarget) до цели (k) от ручного гранатомета (1);
средство (8) пользовательского интерфейса, выполненное с возможностью принимать запрос на помощь оператору в первый момент работы (tact) и передавать показания об углах, чтобы гранатомет (1) мог поразить движущуюся цель (k);
средство (10) памяти, содержащее данные (S, m, Cd, Ci, VIN, VIN1) боеприпасов, указывающие баллистические характеристики упомянутой гранаты, данные окружающей среды, указывающие параметры (р, R) окружающей среды, и данные (errx, erry) точности, указывающие требуемую точность попадания,
причем упомянутое устройство (2) отличается тем, что содержит электронное средство (9) обработки, выполненное с возможностью
измерять с помощью упомянутого электронного средства (7) измерения множество углов тангажа (αpitch(tci)) и углов курса (αhead(tci)), последовательно полученных от гранатомета (1) в заранее определенном диапазоне выборки данных, в течение которого оператор перемещает гранатомет (1) для поддержания его наведенным на движущуюся цель (k),
измерять с помощью упомянутого электронного средства (6) измерения множество последовательно полученных расстояний Disttarget(tci) до цели (k) от гранатомета (1) в течение упомянутого диапазона выборки данных;
определять математическую функцию перемещения (F(X), F(Y), F(Z)), связанную с движением цели (k), на основании углов тангажа (αpitch(tci)), углов курса (αheading(tci)) и расстояний (Disttarget(tci)), измеренных в течение упомянутого диапазона выборки данных;
определять идеальный угол тангажа (αipitch) и теоретический момент попадания (timp) гранаты по цели (k) с помощью упомянутой математической функции перемещения и на основании данных боеприпасов;
определять на основании упомянутого идеального угла тангажа (αipitch), данных боеприпасов, данных окружающей среды и данных точности положение стрельбы, содержащее угол тангажа стрельбы (αfpitch) и угол курса стрельбы (αfhead), придаваемый гранатомету (1), чтобы граната поражала цель (k) в упомянутый момент попадания (timp);
измерять с помощью упомянутого электронного средства (7) измерения фактический угол тангажа (αpitch(tact)) и фактический угол курса αheading(tact), указывающие положение, придаваемое оператором гранатомету (1) в упомянутый первый момент работы (tact);
вычислять разность тангажа (Dapitch(tact)) между углом тангажа стрельбы (αfpitch) и фактическим углом тангажа (αpitch(tact)), измеренным в упомянутый первый момент работы (tact);
вычислять разность курса (Dahead(tact)) между углом курса стрельбы (αfhead) и фактическим углом курса (αhead(tact)), измеренным в упомянутый первый момент работы (tact);
передавать через упомянутый пользовательский интерфейс (8) данные, указывающие изменение угла тангажа и/или угла курса, которое оператор должен придать гранатомету (1), чтобы разность тангажа (Dapitch(tact)) и разность курса (Dahead(tact)), измеренные в упомянутый первый момент работы (tact), были равны нулю,
причем упомянутое электронное средство (9) обработки также выполнено с возможностью
определять начальный угол тангажа (αipitch) с помощью упомянутой математической функции перемещения (F(X), F(Y), F(Z)) на основании упомянутых данных боеприпасов и упомянутого момента попадания (timp);
вычислять траекторию упомянутой гранаты на основании упомянутого начального угла тангажа (αipitch), упомянутых данных боеприпасов и упомянутых данных окружающей среды;
изменять упомянутый начальный угол тангажа (αipitch), пока соответствующая траектория гранаты не удовлетворит условию сходимости к упомянутой цели (k);
назначать упомянутому углу тангажа стрельбы (αfpitch) угол тангажа (αipitch), соответствующий траектории гранаты, которая удовлетворяет упомянутому условию сходимости.
2. Устройство по п.1, в котором упомянутое электронное средство (9) обработки выполнено с возможностью
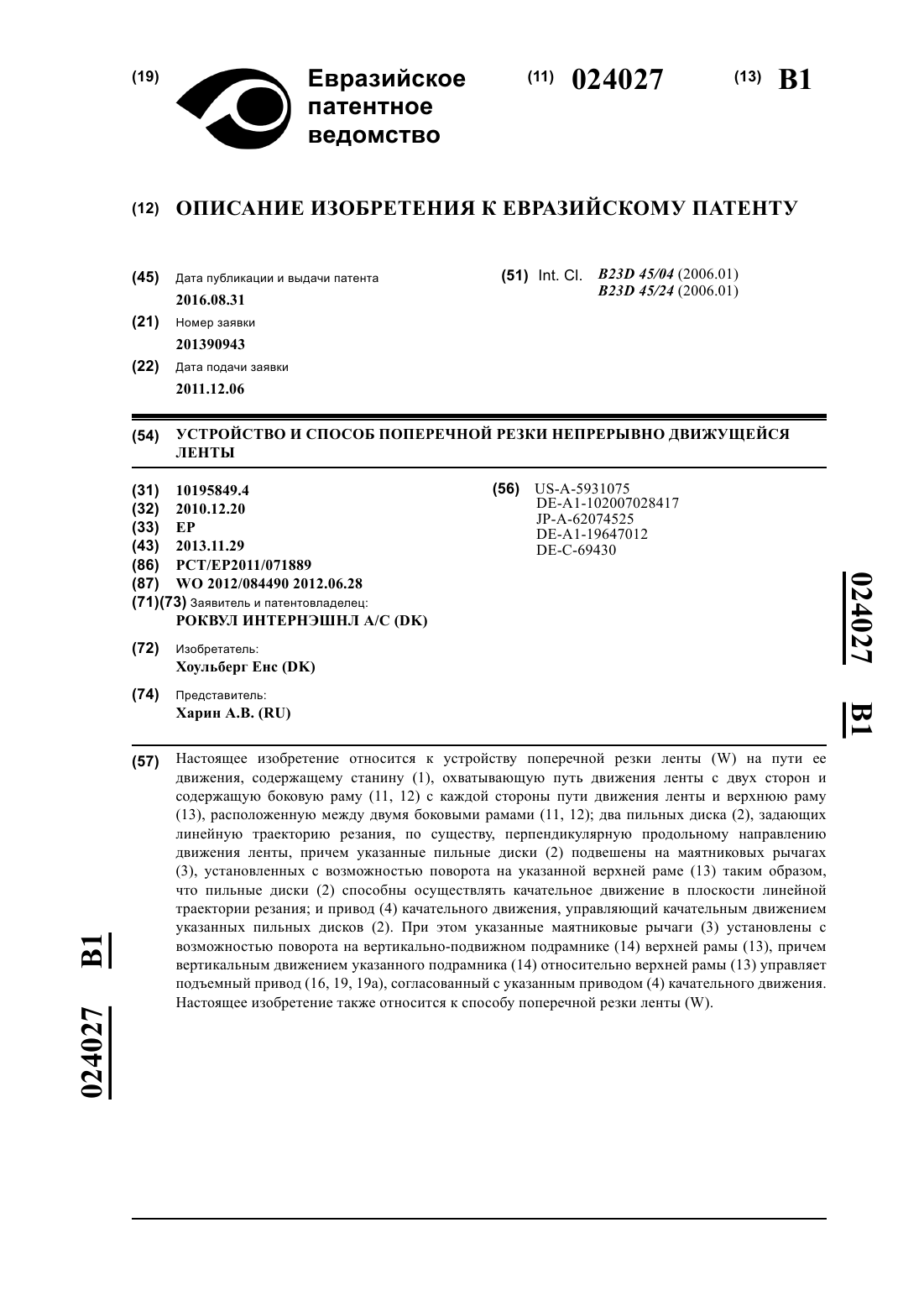
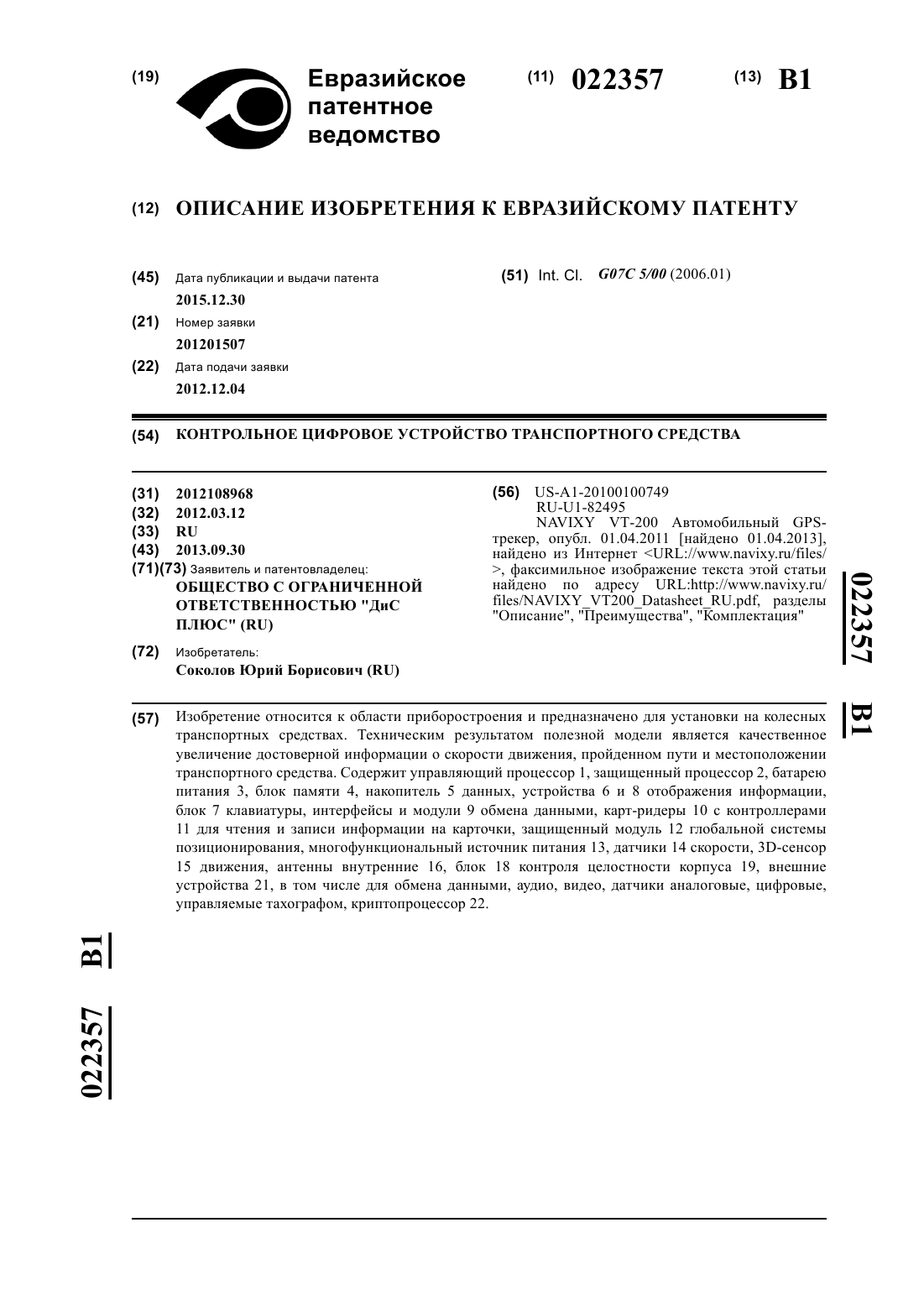
принимать через упомянутое средство (8) интерфейса управление выбором типа выстрела по настильной траектории или типа выстрела по навесной траектории;
в случае выбора выстрела по настильной траектории изменять упомянутый начальный угол тангажа (αipitch) по следующему соотношению:

в случае выбора выстрела по навесной траектории изменять упомянутый начальный угол тангажа (αipitch) по следующему соотношению:

где XT(timp) и YT(timp) - координаты позиции цели (k) в момент попадания;
xi и yi - координаты позиции, занимаемой гранатой вдоль траектории в момент времени i, определенные относительно декартовой системы координат (S (X,Y,Z)); и
max(yi) - максимальное значение координаты траектории гранаты по первой оси (Y) декартовой системы координат (S (X,Y,Z)).
3. Устройство по п.2, в котором упомянутое электронное средство (9) обработки выполнено с возможностью вычислять упомянутый угол курса стрельбы (αfhead) по следующему соотношению:

где GITX - проекция перемещения гранаты вдоль сходящейся траектории на вторую ось (X) упомянутой декартовой системы координат (S (X,Y,Z)).
4. Устройство по п.3, в котором упомянутое электронное средство (9) обработки выполнено с возможностью
вычислять первое бесконечно малое перемещение (xi, yi), связанное с траекторией упомянутой гранаты, по упомянутым первой (Y) и второй (X) осям на основании упомянутого начального угла тангажа (αipitch), упомянутых баллистических данных и упомянутых данных окружающей среды по соотношениям:

где S - лобовая площадь гранаты;
m - масса гранаты;
Cd - коэффициент аэродинамического сопротивления гранаты;
Vin - скорость выстрела гранатой;
вычислять первый угол наклона гранаты по соотношению

вычислять скорость выстрела гранатой по соотношению

последовательно вычислять бесконечно малые перемещения (xi, yi), связанные с траекторией упомянутой гранаты, по упомянутым первой (Y) и второй (X) осям на основании упомянутого начального угла тангажа (αipitch), упомянутых баллистических данных и упомянутых данных окружающей среды, где каждое вычисление производится по упомянутым соотношениям:

5. Устройство по п.4, в котором упомянутое электронное средство (9) обработки выполнено с возможностью определять условие сходимости упомянутой траектории к цели (k), когда первое или второе условие удовлетворено:
упомянутое первое условие имеет место, если Xi=ΔXi+Xi-1≥XT(timp) и выбранный тип выстрела является выстрелом по настильной траектории;
упомянутое второе условие имеет место, если Yi=Δyi+Yi-1≤YT(timp), изменение Δyi гранаты отрицательно и выбранный тип выстрела является выстрелом по навесной траектории.
6. Устройство по п.5, в котором упомянутое электронное средство (9) обработки выполнено с возможностью изменять упомянутый начальный угол тангажа (αipitch), когда третье или четвертое условие не удовлетворено, причем
третье условие удовлетворяется, если позиция Xi гранаты содержится в диапазоне, определенном минимальным значением XT(timp)-errx и максимальным значением, соответствующим XT(timp)+errx, где errx - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой второй оси (X), тогда как
четвертое условие удовлетворяется, если значение Yi гранаты содержится в диапазоне, определенном минимальным значением YT(timp)-erry и максимальным значением, соответствующим YT(timp)+erry, где erry - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой первой оси (Y).
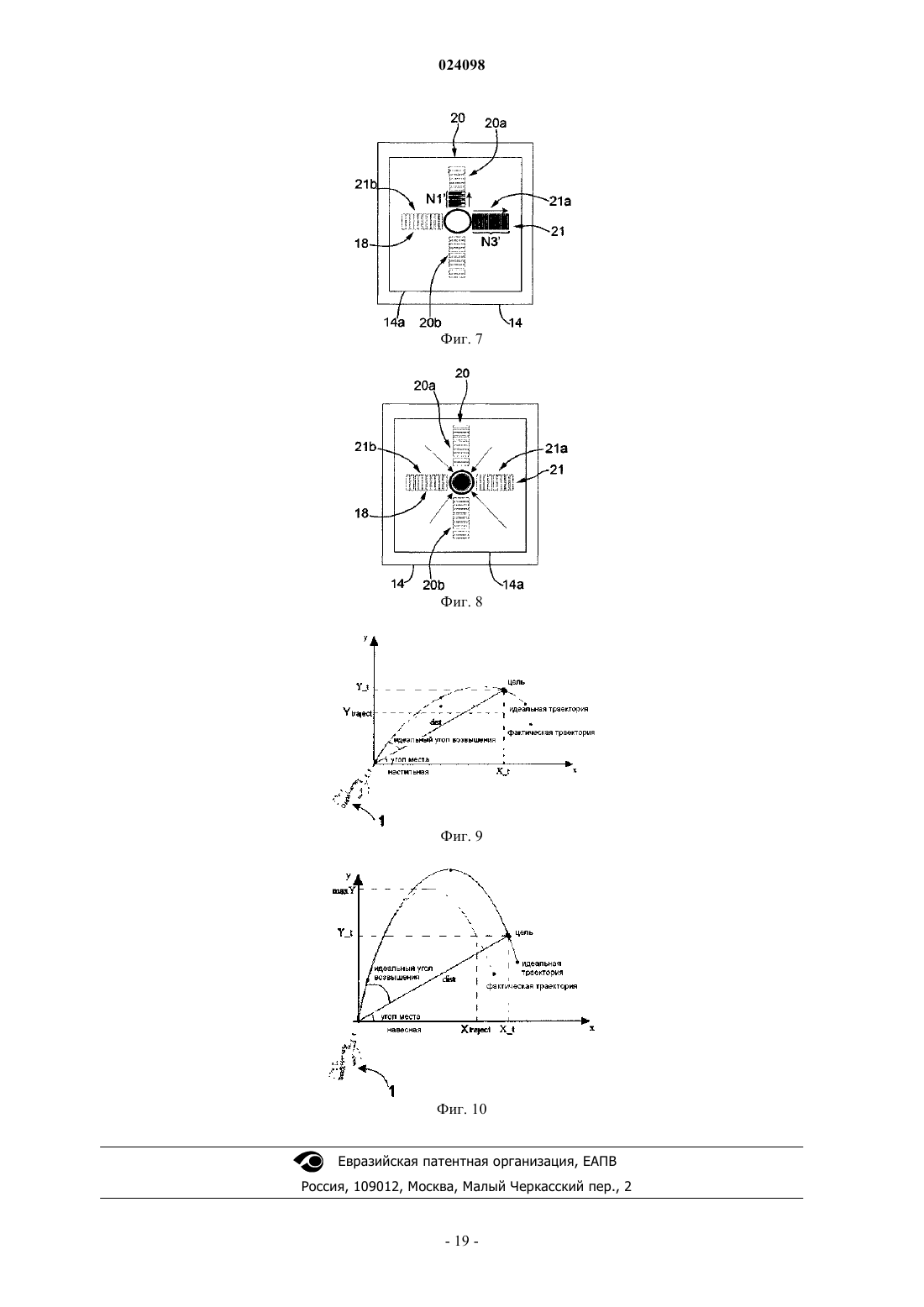
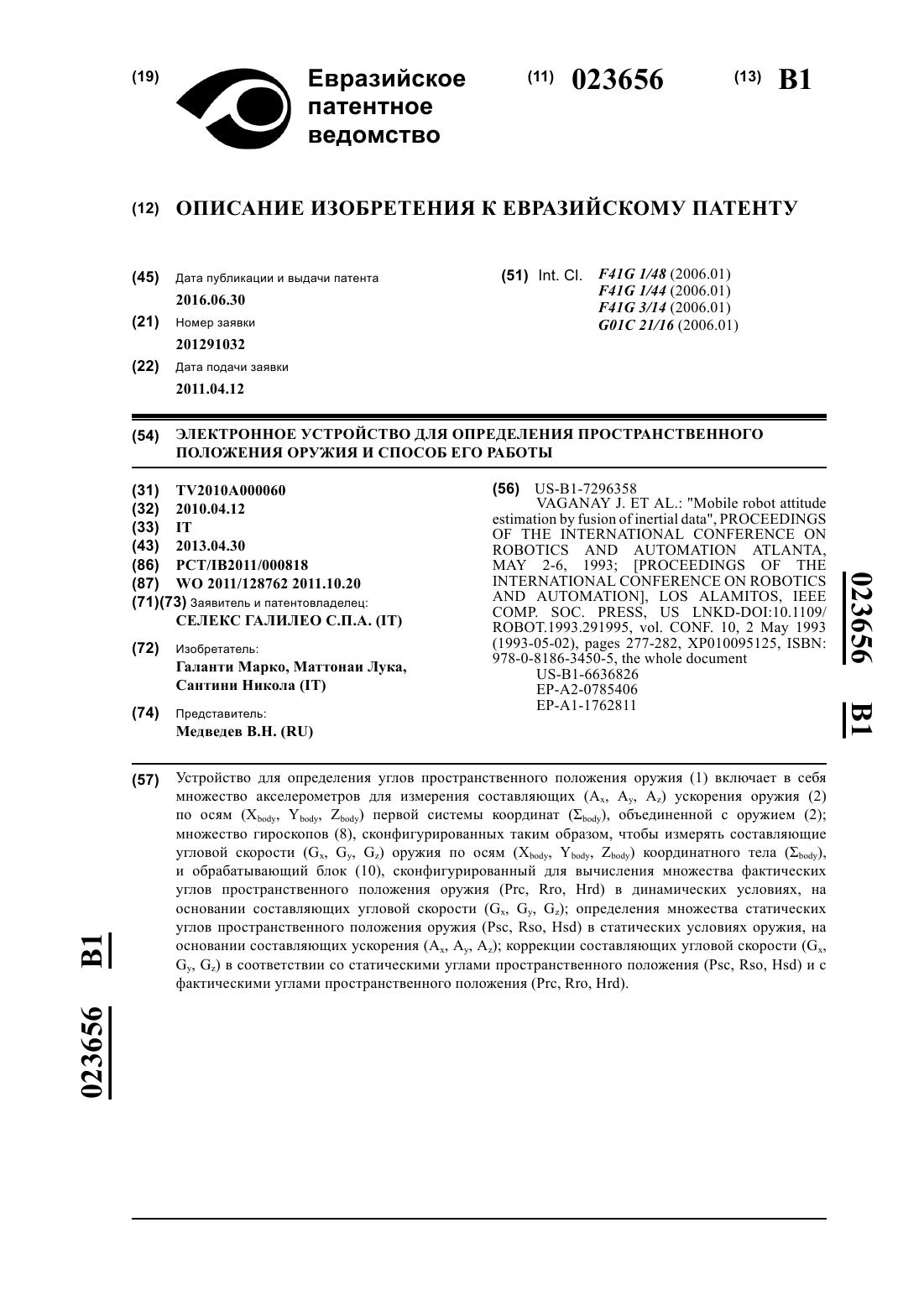
7. Устройство по п.6, в котором упомянутое средство (8) интерфейса содержит дисплей (14), отображающий графическое перекрестие (18) положения, снабженное множеством светящихся сегментов, размещенных выровненными один за другим с образованием первого (20) и второго (21) ответвлений положения, причем упомянутое электронное средство (9) обработки выполнено с возможностью включать/отключать
сегменты первого ответвления (20) положения как функцию изменения угла тангажа (Dapitch), придаваемого гранатомету (1) для его ориентации в положение стрельбы; и/или
сегменты второго ответвления (21) положения, ортогонального первому ответвлению (20) положения, как функцию изменения угла курса (Dahead), придаваемого гранатомету (1) для его ориентации в положение стрельбы.
8. Способ наведения на цель посредством оптоэлектронного цифрового устройства по п.1, причем упомянутый способ отличается тем, что содержит этапы, на которых
измеряют с помощью упомянутого электронного средства (7) измерения множество углов тангажа (αpitch(tci)) и углов курса (αhead(tci)), последовательно полученных гранатометом (1) в заранее определенном диапазоне выборки данных, в течение которого оператор перемещает гранатомет (1) для поддержания его наведенным на движущуюся цель (k);
измеряют с помощью упомянутого электронного средства (6) измерения множество последовательно полученных расстояний Disttarget(tci) до цели (k) от гранатомета (1) в течение упомянутого диапазона выборки данных;
определяют математическую функцию перемещения (F(X), F(Y), F(Z)), связанную с движением упомянутой цели, на основании углов тангажа (αpitch(tci)), углов курса (αheading(tci)) и расстояний (Disttarget(tci)), измеренных в течение упомянутого диапазона выборки данных;
определяют идеальный угол тангажа (αipitch) и теоретический момент попадания (timp) гранаты по цели (k) с помощью упомянутой математической функции перемещения и на основании данных боеприпасов;
определяют на основании упомянутого идеального угла тангажа (αipitch) и данных боеприпасов положение стрельбы, содержащее угол тангажа стрельбы (αfpitch) и угол курса стрельбы (αfhead), придаваемые гранатомету (1), чтобы граната поражала цель (k) в упомянутый момент попадания (timp);
измеряют с помощью упомянутого электронного средства (7) измерения фактический угол тангажа (αpitch(tact)) и фактический угол курса (αheading(tact)), указывающие положение, придаваемое оператором гранатомету (1) в упомянутый первый момент работы (tact);
вычисляют разность тангажа (Dapitch(tact)) между углом тангажа стрельбы (αfpitch) и фактическим углом тангажа (αpitch(tact)), измеренным в упомянутый первый момент работы (tact);
вычисляют разность курса (Dahead(tact)) между углом курса стрельбы (αfhead) и фактическим углом курса (αhead(tact)), измеренным в упомянутый первый момент работы (tact);
передают через упомянутый пользовательский интерфейс (8) данные, указывающие изменение угла тангажа и/или угла курса, которое оператор должен придать гранатомету (1), чтобы разность тангажа (Dapitch(tact)) и разность курса (Dahead(tact)), измеренные в упомянутый первый момент работы (tact), были равны нулю,
причем способ также содержит этапы, на которых
определяют начальный угол тангажа (αipitch) с помощью упомянутой математической функции перемещения (F(X), F(Y), F(Z)) на основании упомянутых данных боеприпасов и упомянутого момента попадания (timp);
вычисляют траекторию упомянутой гранаты на основании упомянутого начального угла тангажа (αipitch) и упомянутых данных боеприпасов и упомянутых данных окружающей среды;
изменяют упомянутый начальный угол тангажа (αipitch), пока соответствующая траектория гранаты не удовлетворит условию сходимости к упомянутой цели (k);
назначают угол тангажа (αipitch), соответствующий траектории гранаты, которая удовлетворяет упомянутому условию сходимости, упомянутому углу тангажа стрельбы (αfpitch).
9. Способ по п.8, содержащий этапы, на которых
принимают через упомянутое средство (8) интерфейса управление выбором типа выстрела по настильной траектории или типа выстрела по навесной траектории;
в случае выбора выстрела по настильной траектории изменяют упомянутый начальный угол тангажа (αipitch) по следующему соотношению:

в случае выбора выстрела по навесной траектории изменяют упомянутый начальный угол тангажа (αipitch) по следующему соотношению:

где XT(timp) и YT(timp) - координаты позиции цели (k) в момент попадания; xi и yi - координаты позиции, занимаемой гранатой вдоль траектории в момент времени i, определенные относительно декартовой системы координат (S(X,Y,Z)); и max(yi) - максимальное значение координаты траектории гранаты по первой оси (Y) декартовой системы координат (S(X,Y,Z)).
10. Способ по п.9, содержащий этап вычисления упомянутого угла курса стрельбы (αfhead) по следующему соотношению:

где GITX - проекция перемещения гранаты вдоль сходящейся траектории на вторую ось (X) упомянутой декартовой системы координат (S(X,Y,Z)).
11. Способ по п.10, содержащий этапы, на которых
вычисляют первое бесконечно малое перемещение (xi, yi), связанное с траекторией упомянутой гранаты, по упомянутой первой (Y) и второй оси (X) на основании упомянутого начального угла тангажа (αipitch) и упомянутых баллистических данных и упомянутых данных окружающей среды, по соотношениям:

где S - лобовая площадь гранаты;
m - масса гранаты;
Cd - коэффициент аэродинамического сопротивления гранаты;
VIN - начальная скорость гранаты;
вычисляют первый угол наклона гранаты по соотношению

вычисляют скорость выстрела гранатой по соотношению

последовательно вычисляют бесконечно малые перемещения (xi, yi), связанные с траекторией упомянутой гранаты, по упомянутым первой (Y) и второй (X) осям, на основании упомянутого начального угла тангажа (αipitch), упомянутых баллистических данных и упомянутых данных окружающей среды, где каждое вычисление производится по упомянутым соотношениям:


12. Способ по п.8, содержащий этапы, на которых определяют условия сходимости упомянутой траектории к цели (k), когда первое или второе условие удовлетворено:
упомянутое первое условие имеет место, если Xi=ΔXi+Xi-1>=XT(timp), и выбранный тип выстрела является выстрелом по настильной траектории;
упомянутое второе условие имеет место, если Yi=ΔYi+Yi-1<=YT(timp), изменение Δyi гранаты отрицательно и выбранный тип выстрела является выстрелом по навесной траектории.
13. Способ по п.8, содержащий этапы, на которых изменяют упомянутый начальный угол тангажа (αipitch), когда третье или четвертое условие не удовлетворено, причем
третье условие удовлетворяется, если позиция Xi гранаты содержится в диапазоне, определенном минимальным значением XT(timp)-errx и максимальным значением, соответствующим XT(timp)+errx, где errx - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой второй оси (X), тогда как
четвертое условие удовлетворяется, если позиция Yi гранаты содержится в диапазоне, определенном минимальным значением YT(timp)-erry и максимальным значением, соответствующим YT(timp)+erry, где erry - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой первой оси (Y).
14. Способ по п.13, в котором упомянутое средство (8) интерфейса содержит дисплей (14), предназначенный для отображения графического перекрестия (18) положения, снабженного множеством светящихся сегментов, размещенных выровненными один за другим с образованием первого (20) и второго (21) ответвлений положения, причем упомянутый способ содержит этапы, на которых включают/отключают
сегменты первого положения как функцию изменения угла тангажа (Dapitch), придаваемого гранатомету (1) для его ориентации в положение стрельбы; и/или
сегменты второго ответвления (21) положения, ортогонального первому ответвлению (20) положения, как функцию изменения угла курса (Dahead), придаваемого гранатомету (1) для его ориентации в положение стрельбы.

Текст
ОПТОЭЛЕКТРОННОЕ ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ПОМОЩИ ОПЕРАТОРУ ПРИ ОПРЕДЕЛЕНИИ ПОЛОЖЕНИЯ СТРЕЛЬБЫ, ПРИДАВАЕМОГО РУЧНОМУ ГРАНАТОМЕТУ, ДЛЯ ПОРАЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ И СООТВЕТСТВУЮЩИЙ СПОСОБ ЭКСПЛУАТАЦИИ Изобретение относится к оптоэлектронному устройству (2) для помощи оператору при определении положения стрельбы, придаваемого ручному гранатомету (1), для поражения движущейся цели (k), содержащему электронный блок (9) обработки, выполненный с возможностью измерять угол тангажа (pitch(tci и угол курса (heading(tci гранатомета (1) и расстояния (Disttarget(tci до цели (k), когда гранатомет (1) перемещается оператором при наведении на движущуюся цель (k); определять данные позиции (XT(ti), YT(ti), ZT(ti, указывающие позицию движущейся цели (k); определять будущий момент попадания (timp) гранаты по цели (k) на основании данных позиции (XT(ti), YT(ti), ZT(ti и данных, указывающих баллистику гранаты; определять положение стрельбы по цели (k) на основании момента попадания (timp); измерять угол тангажа (pitch(tact и угол курса (heading(tact, указывающие положение, придаваемое гранатомету(1) оператором; вычислять разность тангажа (pitch) между углом тангажа стрельбы (fpitch) и измеренным углом тангажа (pitch(tact и разность курса (head) между углом курса стрельбы(fhead) и измеренным углом курса (head(tact; передавать оператору изменения тангажа и/или курса придаваемых гранатомету (1) таким образом, чтобы разность тангажа (pitch) и/или курса (head) была равна нулю. Область техники Настоящее изобретение относится к оптоэлектронному цифровому устройству для помощи оператору при определении положения стрельбы, придаваемого ручному гранатомету, для поражения движущейся цели и к соответствующему способу эксплуатации. Уровень техники Изменяющийся сценарий использования вооруженных сил в последнее время привел к всеобъемлющему пересмотру задач и снаряжения, поступающего в распоряжение операторов вооружений при разработке операций, и, в частности, к более широко распространенному и эффективному использованию крупнокалиберных боеприпасов для достижения высокой точности в ходе боестолкновения и, следовательно, высокой возможности ослабления боеспособности противника. Для этой цели становится необходимым снабдить военного оператора системой вооружений, которая содержит не только традиционное ручное оружие, например винтовку, но и гранатомет, который присоединен к ручному оружию, что позволяет оператору осуществлять запуск в направлении движущейся цели крупнокалиберные боеприпасы калибром большим или равным 40 мм, которые, как известно, обозначаются словом "граната". Однако использование систем вооружений, объединяющих в себе гранатомет вышеописанного типа, имело до настоящего времени сравнительно ограниченное распространение, поскольку было установлено, что вероятность неудачи при атаке движущейся цели одиночной гранатой весьма высока и поэтому неприемлема при военных действиях. Фактически, вероятность неудачи при ударе по движущейся цели гранатой, запущенной из системы вооружений вышеописанного типа, в значительной степени зависит от определения правильного положения стрельбы, придаваемого гранатомету оператором. Однако такие оценочные результаты чрезвычайно сложны и подвержены ошибкам, поскольку оператору приходится выполнять чрезвычайно быстро, особенно в условиях боестолкновения, визуальную оценку расстояния до движущейся цели, визуальную оценку угла места, где находится движущаяся цель, и определять положение стрельбы, придаваемое гранатомету, с учетом движения цели, расстояния, угла и траектории гранаты, причем определить траекторию, как известно, особенно сложно. Поэтому до настоящего времени использование систем вооружений, снабженных ручными гранатометами вышеописанного типа, было признано очень неудобным, поскольку сопряжено с высоким риском обнаружения военного оператора наряду с низкой вероятностью поражения цели гранатами. Сущность изобретения Таким образом, задачей настоящего изобретения является обеспечение оптоэлектронного цифрового устройства, предназначенного для помощи оператору, как при определении положения стрельбы,придаваемого ручному гранатомету, так и при пространственной ориентации, придаваемой момент за моментом гранатомету согласно данному положению стрельбы, в соответствии с наведением гранатомета самим оператором, для повышения вероятности успешного поражения движущейся цели гранатой. Согласно настоящему изобретению оптоэлектронное цифровое устройство предусмотрено для помощи оператору при определении положения стрельбы, придаваемого ручному гранатомету, для поражения движущейся цели гранатой, как заявлено в п.1 и предпочтительно, но необязательно, как в любом из пунктов, зависящих прямо или косвенно от п.1. Согласно настоящему изобретению дополнительно предусмотрен способ для помощи оператору,посредством оптоэлектронного цифрового устройства, при определении положения стрельбы, придаваемого ручному гранатомету, для поражения движущейся цели гранатой согласно тому, как заявлено в п.1 и предпочтительно, но необязательно, как в любом из пунктов, зависящих прямо или косвенно от п.1. Согласно настоящему изобретению дополнительно предусмотрен компьютерный продукт, загружаемый в память электронного вычислителя, для помощи оператору, когда реализован самим электронным компьютером, при определении положения стрельбы, придаваемого ручному гранатомету, для поражения движущейся цели, как заявлено в п.9. Согласно настоящему изобретению, предусмотрен также компьютерный продукт, загружаемый в память электронного блока обработки и запрограммированный для реализации, когда выполняется электронным блоком обработки, операций, представленные способом согласно пунктам формулы изобретения. Краткоеописание чертежей Настоящее изобретение будет описано ниже со ссылкой на прилагаемые чертежи, которые иллюстрируют неограничительный вариант осуществления, на которых показано: фиг. 1 - схематически гранатомет в положении целеуказания, снабженный вспомогательным оптоэлектронным цифровым устройством, выполненным согласно принципам настоящего изобретения; фиг. 2 - блок-схема вспомогательного оптоэлектронного устройства, показанного на фиг. 1; фиг. 3 - схематический вид сверху и сбоку гранатомета, показанного на фиг. 1 в положении стрельбы; фиг. 4 а-4 с - целиком блок-схема, содержащая операции, выполняемые вспомогательным оптоэлектронным цифровым устройством, показанным на фиг. 1; фиг. 5-8 - схематически примеры графического перекрестия, генерируемого вспомогательным оптоэлектронным устройством для указания военному оператору направления, придаваемого гранатомету для поражения движущейся цели; фиг. 9 и 10 - два примера идеальной и фактической траектории гранаты в плоскости декартовых координат, когда производится стрельба, соответственно, по "настильной" и "навесной" типологии. Предпочтительные варианты осуществления изобретения На фиг. 1 ссылочной позицией 1 обозначен ручной гранатомет целиком, к которому присоединено вспомогательное оптоэлектронное устройство 2, выполненное с возможностью помогать оператору при определении положения стрельбы, придаваемого самому гранатомету 1 для поражения движущейся цели k. Вспомогательное оптоэлектронное устройство 2 также выполнено с возможностью передавать оператору момент за моментом угловые движения тангажа и курса, придаваемые гранатомету 1 для поражения цели k, на основании различий в пространстве, имеющих место между определенным положением стрельбы и мгновенным положением, придаваемым гранатомету 1 оператором, и заданного следующего движения цели к. Гранатомет 1 предпочтительно, но необязательно, можно монтировать на ручное оружие 3, например винтовку, и в примере, показанном на фиг. 1, содержит пусковую трубу 4 для гранаты, представляющую продольную ось L, совпадающую и объединенную с первой декартовой осью XBODY, заранее определенной объемной системы координат BODY, связанной с гранатометом 1, и представляющей вторую декартову ось YBODY, ортогональную первой декартовой оси XBODY, и третью декартову ось ZBODY,ортогональную первой XBODY и второй декартовой оси YBODY. Гранатомет 1 также содержит указательное устройство 5, позволяющее оператору нацеливаться на движущуюся цель k и затем помещать гранатомет 1 в положение целеуказания на основании отображения самой цели k. Указательное устройство 5 относится к известному типу и поэтому не будет в дальнейшем описано,кроме как для пояснения того, что его можно сконфигурировать таким образом, чтобы, например, в положении целеуказания, продольная ось L пусковой трубы 4 для гранаты пересекала цель k. Согласно фиг. 2 вспомогательное оптоэлектронное устройство 2 содержит электронное устройство 6 измерения расстояния, которое выполнено с возможностью измерять расстояние Disttarget до цели k от гранатомета 1; и электронное устройство 7 измерения положения, которое выполнено с возможностью определять мгновенное положение гранатомета 1, т.е. угол тангажа pitch и угол курса head, которые характеризуют само положение. Вспомогательное оптоэлектронное устройство 2 также содержит пользовательский интерфейс 8,посредством которого оператор может подавать команды на вспомогательное оптоэлектронное устройство 2 и принимать показания об изменении положения pitch и head, придаваемого гранатомету 1 для поражения движущейся цели k. Вспомогательное оптоэлектронное устройство 2 также содержит электронный блок 9 обработки,который выполнен с возможностью вычислять угол тангажа fpitch и угол курса fhead которые характеризуют положение стрельбы, и передает оператору, посредством пользовательского интерфейса 8 и в соответствии с перемещением самого гранатомета 1 оператором изменение положения pitch, head, придаваемого гранатомету 1, чтобы ориентировать его для поражения движущейся цели k. Вспомогательное оптоэлектронное устройство 2 дополнительно содержит блок 10 памяти, содержащий ряд данных боеприпасов, указывающих множество разных типов гранат, применяемых в гранатомете 1. Блок 10 памяти дополнительно содержит, для каждого типа гранаты, ряд баллистических данных,связанных с самой гранатой, например лобовую площадь S гранаты, т.е. площадь передней поверхности самой гранаты; массу m гранаты; коэффициент Cd аэродинамического сопротивления гранаты; коэффициент Ci подъмной силы гранаты; скорость VIN1 пуска гранаты; коэффициент VIN1 связанный с изменением скорости VIN пуска гранаты при изменении температуры Т. Блок 10 памяти также выполнен с возможностью хранить дополнительно данные окружающей среды, указывающие атмосферное давление р, термодинамическую постоянную R воздуха; и данные точно-2 024098 сти, указывающие минимальную желаемую точность erry попадания гранаты по цели k по вертикальной оси (например, по оси Y на фиг. 1), которая ортогональна плоской опорной поверхности земли, и минимальную желаемую точность errx попадания гранаты по цели k по горизонтальной оси (например, по осиX на фиг. 1), параллельной плоской поверхности земли в направлении стрельбы (ошибки, связанные с радиусом действия гранаты при использовании). Вспомогательное оптоэлектронное устройство 2 также содержит датчики 11, выполненные с возможностью измерять температуру Т воздуха, соответствующую на начальном этапе температуре гранаты. Согласно фиг. 2 устройство 6 измерения расстояния может содержать, например, лазерный дальномер ("лазер" расшифровывается как "усиление света посредством вынужденного излучения"), который выполнен с возможностью испускать лазерные импульсы по направлению к цели для определения расстояния Disttarget до цели от гранатомета 1 как функции "времени распространения" tflight лазерного импульса. Что касается электронного устройства 7 измерения положения, в примере, показанном на фиг. 2,оно содержит инерциальную электронную платформу 12, выполненную с возможностью обеспечивать в выходном сигнале составляющих ускорения Ax, Ay, Az и составляющих угловой скорости Gx, Gy и Gz гранатомета 1, определенные относительно объемной системы координат BODY. В частности, в примере, показанном на фиг. 2, инерциальная электронная платформа 12 для удобства содержит один или более акселерометров (не показаны), например двухосный акселерометр и два одноосных акселерометра, представляющих две измерительные оси, ориентированные вдоль осей XBODY иYBODY объемной системы координат BODY; и один или более гироскопов, представляющих все три измерительные оси, ориентированные параллельно осям XBODY, YBODY и ZBODY объемной системы координатBODY. Устройство 7 измерения положения также содержит вычислительный модуль 13, принимающий входные составляющие ускорения Ax, Ay, Az и составляющие угловой скорости Gx, Gy и Gz, измеренные электронной инерциальной платформой 12, и обрабатывающий их для обеспечения в выходном сигнале угла тангажа pitch и угла курса head. В этом случае углы тангажа pitch и курса head могут быть легко определены вычислительным модулем 13 посредством, например, способа вычисления, описанного в патентной заявке, поданной в Италии 12 апреля 2010 г.,TV2010A000060, которая включена в настоящее описание посредством ссылки. Пользовательский интерфейс 8 содержит экран или дисплей 14 для визуализации одного или более графических интерфейсов, устройство 15 управления и предпочтительно, но необязательно, устройство 16 генерации речевых сообщений. В частности, электронный блок 9 обработки может быть выполнен с возможностью обеспечивать,что дисплей 14 и/или устройство 16 генерации речевых сообщений извещает оператора об изменениях положения pitch и head, которые необходимо придать гранатомету 1, тогда как устройство 15 управления может содержать клавиатуру, снабженную набором клавиш, посредством которых оператор подает команды вспомогательному оптоэлектронному устройству 2. В примере, показанном на фиг. 2, удобно, чтобы дисплей 14 был OLED-типа (расшифровывается как органический светодиод), тогда как электронный блок 9 обработки выполнен с возможностью обеспечивать, что дисплей 14 также визуализирует поддерживающий графический интерфейс 14 а, представляющий изменение положения pitch и head, которые необходимо придать гранатомету 1 для поражения движущейся цели к. В частности, электронный блок 9 обработки выполнен с возможностью обеспечивать, что вспомогательный графический интерфейс 14 а, визуализируемый дисплеем 14, содержит графическое перекрестие 18 положения, снабженное множеством светящихся сегментов, размещенных выровненными один за другим с образованием первого и второго ответвлений положения, которые взаимно ортогональны и пересекаются в общей центральной точке. В частности, в примере, показанном на фиг. 5-8, электронный блок 9 обработки выполнен с возможностью включать/отключать сегменты вертикального ответвления 20 положения как функции положительного или отрицательного изменения pitch угла тангажа pitch, придаваемого гранатомету 1 для его ориентации в положение стрельбы; сегменты горизонтального ответвления 21 положения как функции положительного или отрицательного изменения head угла курса head, придаваемого гранатомету 1 для его ориентации в положение стрельбы. В частности, в примере, показанном на фиг. 5-8, ответвление 20 положения делится в соответствии со средней точкой на первое 20 а и второе светящееся ответвление 20b, причем первое светящееся ответвление 20 а содержит заранее определенное количество N1 сегментов, выполненных с возможностью включаться/отключаться как функции отрицательного изменения угла тангажа pitch, тогда как второе светящееся ответвление 20b содержит заранее определенное количество N1 сегментов, выполненных с возможностью включаться/отключаться как функции отрицательного изменения угла тангажа pitch. Второе светящееся ответвление 21, в свою очередь, делится в соответствии со средней точкой на первое 21 а и второе 21b светящиеся ответвления, причем первое светящееся ответвление 21 а содержит заранее определенное количество N3 сегментов, выполненных с возможностью включаться/отключаться как функции отрицательного изменения угла курса head, тогда как второе светящееся ответвление 21b содержит заранее определенное количество N4 сегментов, выполненных с возможностью включаться/отключаться как функции положительного изменения угла курса head. Следует указать, что в дальнейшем термин "положение стрельбы" гранатомета 1 следует понимать как состояние, в котором гранатомет 1 сориентирован в пространстве для обеспечения того, что граната поразит цель k; тогда как термин "положение целеуказания" следует понимать как состояние, в котором оператор указывает на цель посредством указательного устройства 5 (фиг. 1). В частности, со ссылкой на фиг. 3 в произвольный момент ti общее положение гранатомета 1 характеризуется углом тангажа pitch(ti) и углом курса head(ti), причем угол тангажа pitch(ti) соответствует углу между первой декартовой осью XBODY и опорной плоскостью, лежащей на уровне земли; тогда как угол курса head(ti) соответствует азимутальному углу между второй декартовой осью YBODY и географическим севером Земли. Что касается устройства 16 генерации речевых сообщений, оно может быть выполнено с возможностью передавать речевые сообщения, содержащие изменение положения head и pitch, придаваемого гранатомету 1 для поражения движущейся цели. Устройство 16 генерации речевых сообщений может содержать, например, электронный цифровой блок, выполненный с возможностью производить цифровые речевые сообщения, и громкоговоритель, такой как наушник, подключенный к электронному цифровому блоку и используемый оператором для прослушивания информации относительно изменения положения head и pitch, придаваемого гранатомету 1. Что касается электронного блока 9 обработки, он может содержать микропроцессор, принимающий на входе углы тангажа pitch и курса head; расстояние Disttarget до цели и команды, отдаваемые пользователем посредством устройства 15 управления. Электронный блок 9 обработки также принимает ряд данных, указывающих тип запускаемой гранаты, таких как лобовая площадь S, масса m, коэффициент Cd аэродинамического сопротивления; коэффициент Ci подъмной силы; скорость выпуска VIN гранаты; коэффициент изменения VIN1. Электронный блок 9 обработки дополнительно принимает ряд данных, указывающих атмосферное давление р; термодинамическую постоянную R воздуха и данные, указывающие минимальную желаемую точность попадания erry и errx по оси X и Y соответственно. Электронный блок 9 обработки выполнен с возможностью осуществлять способ вычисления, который обрабатывает вышеперечисленные входные переменные для передачи оператору момент за моментом в выходном сигнале изменения положения pitch и head, придаваемого гранатомету 1, для достижения правильного положения стрельбы, необходимого для поражения движущейся цели k. В частности, электронный блок 9 обработки предназначен для изменения количества N1 и/или N2 включающихся/отключающихся сегментов, содержащихся в первом светящемся ответвлении 20, и количества N3 и/или N4 включающихся/отключающихся сегментов, содержащихся во втором светящемся ответвлении 21, для удобного визуального сообщения оператору угла, придаваемого для размещения гранатомета 1 в положение стрельбы. Со ссылкой на фиг. 4 а-4 с ниже будет описан способ вычисления, реализованный электронным блоком 9 обработки для определения изменений положения pitch и head, придаваемого гранатомету 1 для поражения движущейся цели k, причем предполагается, что вспомогательное оптоэлектронное устройство 2 конфигурируется/настраивается на основании конкретного типа гранаты. В частности, конфигурирование/настройка вспомогательного оптоэлектронного устройства 2 может предусматривать, что электронный блок 9 обработки извещает оператора посредством пользовательского интерфейса 8 о различных типах используемых гранат, содержащихся в блоке 10 памяти, и определяет в самом блоке 10 памяти данные, которые характеризуют баллистику гранаты, в соответствии с командой выбора гранаты, подаваемой оператором. На начальном этапе оператор выбирает, посредством пользовательского интерфейса 8, тип траектории стрельбы, придаваемой гранате, который может соответствовать первому типу, в дальнейшем обозначаемому "настильный выстрел", пример которой показан на фиг. 9, или второму типу, в дальнейшем обозначаемому "навесной выстрел", пример которой показан на фиг. 10 (блок 100). Способ, по существу, предусматривает ряд операций получения данных и ряд операций вычисления положения, придаваемого гранатомету 1 для поражения движущейся цели k на основании полученных данных. В частности, способ предпочтительно, но необязательно, предусматривает, что электронный блок 9 обработки передает оператору через пользовательский интерфейс 8 запрос указания/отслеживания целиk с помощью гранатомета в течение данного интервала времени. Оператор ориентирует гранатомет 1 на цель k, чтобы поместить его в положении целеуказания(блок 110) (фиг. 1), и одновременно подает посредством пользовательского интерфейса 8 команду для активации получения данных (t=tc0) (блок 120). На этом этапе вспомогательное оптоэлектронное устройство 2 осуществляет выборку в каждый момент выборки tci (i принимает значения от 0 до n): расстояния до цели k от гранатомета 1 Disttarget=(Disttarget(tc0), , Disttarget(tcn, углы тангажа pitch=(pitch(tc0), ,pitch(tcn и углы курса head=(head(tc0), , head(tcn, которые задают положение гранатомета 1 (блок 130),и сохраняет выбранные данные в блоке 10 памяти (блок 140). С этой целью блок 10 памяти удобно структурировать так, чтобы он содержал циклический буфер 10 а памяти (показанный на фиг. 1), где хранятся выбранные данные Disttarget(tci), pitch(tci), head(tci), полученные в ходе выборки. Электронный блок 9 обработки проверяет, насыщен/полон ли буфер 10 памяти (блок 150), и в случае отрицательного ответа (выход НЕТ из блока 150) увеличивает момент выборки tci=tci+1 (блок 160) и снова повторяет этапы 130, 140, 150 для получения новых данных Disttarget (tci), pitch(tci), head(tci), связанных с движением цели k. В случае положительного ответа (выход ДА из блока 150), т.е. если буфер 10 памяти насыщен/полон, электронный блок 9 обработки временно сортирует данные расстояния/положенияDisttarget(tci), pitch(tci), head(tci), содержащиеся в памяти 30 буфера (блок 170), и обрабатывает те же отсортированные данные Disttarget(tci), pitch(tci), head(tci) для определения позиций PI, занимаемых целью k во времени относительно декартовой системы S (X,Y,Z) (показанной на фиг. 1), начало отсчета S (0,0,0) которой располагается в заранее определенной точке гранатомета 1, например на дульном срезе пусковой трубы 4 для гранаты (блок 180). В частности, электронный блок 9 обработки вычисляет векторы позиции цели PI=Pi(tci)=(XT(tci),YT(tci), ZT(tci, от начального момента выборки tci=tc0 до конечного момента выборки tci=tcn: Электронный блок 9 обработки вычисляет на основании векторов IP, содержащих координаты позиций, занимаемых целью k во времени, и посредством способа оптимизации, например, такого как метод наименьших квадратов или любого другого аналогичного метода аппроксимации движения полиномиальными функциями, предпочтительно, но необязательно, первой степени, которые позволяют устанавливать с определенной степенью аппроксимации, фактические позиции Pi(tc0), Pi(tcn) и следующие позиции Pi(tCn+i), P(tcn+k), занимаемые целью k во время ее движения (блок 190). В частности, на этом этапе способ реализует следующие соотношения, которые позволяют определять, посредством полиномиальных функций F(X), F(Y), F(Z) предпочтительно, но необязательно, первой степени, движение цели в пространстве:bi - заранее определенный угловой коэффициент. При этом электронный блок 9 обработки вычисляет идеальное движение гранаты (блок 200), осуществляя алгоритм, который определяет, начиная с момента tact запрашивания помощи, решение задачи идеального движения гранаты под действием силы тяжести, путем определения дальности GIT, скоростиVIN на выходе из гранатомета 1, идеального угла тангажа idealpitch и времени полета tflight, используемых гранатой для поражения цели k. Следует прояснить, что момент tact запрашивания помощи может соответствовать моменту, когда оператор посредством графического интерфейса 8 подает командный сигнал, запрашивающий вычисление положения стрельбы. В частности, электронный процессор 1 вычисляет: где XT(tact), YT(tact) и ZT(tact) - координаты позиции PI гранаты в момент tact запрашивания помощи. Электронный блок 9 обработки инициализирует счетчик Inum=0 (блок 210) и вычисляет (блок 220) момент попадания timp гранаты по цели к посредством следующего соотношения: с) timp=tact+tflight. Электронный блок 9 обработки вычисляет посредством полиномиальных функций F(X), F(Y), F(Z) позицию цели XT(timp), YT(timp), ZT(timp) в момент попадания timp и определяет расстояние Disttarget от цели k до гранатомета 1 непосредственно в момент попадания timp посредством следующего соотношения: Электронный блок 9 обработки определяет (блок 230) угол тангажа ipitch, соответствующий углу,придаваемому гранатомету 1, для поражения цели k в идеальных условиях, посредством следующего соотношения: При этом электронный блок 9 обработки определяет:f) содержится ли расстояние до цели Disttarget в заранее определенном d диапазоне расстояний, ограниченном минимальным dTMIN и максимальным dTMAX значениями;g) содержится ли угол тангажа ipitch в заранее определенном угловом диапазоне, ограниченном минимальным 1 и максимальным 2 значениями, причем 1 предпочтительно имеет значение около -0.78 и 2 предпочтительно равен приблизительно 0.78 (блок 240). В случае, когда по меньшей мере одно из условий f) и g) не удовлетворяется (выход НЕТ из блока 240), вспомогательное оптоэлектронное устройство 2 генерирует сообщение, которое предупреждает оператора об условии невозможности вычисления угла стрельбы и запрашивает выполнения нового указания цели и получения новых данных (блоки 110-230). Однако, если оба условия f) и g) удовлетворены (выход ДА из блока 240), электронный блок 9 обработки инициализирует интегрирующий счетчик i=1 (блок 250) для определения фактической траектории гранаты на основании идеальной траектории, баллистических данных, данных окружающей среды и данных точности. В частности, электронный блок 9 обработки вычисляет реальное бесконечно малое перемещениеxi и yi гранаты относительно осей X и Y, в момент времени t=tact+idt, где dt - заранее определенный интервал интегрирования, посредством следующих соотношений h) и i) (блок 260): При этом электронный блок 9 обработки увеличивает интегрирующий счетчик i=i+1 и вычисляет наклон фактической траектории гранаты в момент ti=tact+idt посредством следующего соотношения Электронный блок 9 обработки дополнительно вычисляет скорость гранаты Viprojectile в момент ti. посредством следующего соотношения m (блок 280): Электронный блок 9 обработки снова увеличивает интегрирующий счетчик i=i+1 (блок 290) и вычисляет последующие реальные бесконечно малые перемещения xi, yi. гранаты в моменты времениti=tact+idt. В этом случае вычисление каждого бесконечно малого перемещения xi и yi гранаты вдоль фактической траектории производят для каждого интервала времени dt посредством следующего соотношения Согласно фиг. 4 с, вычислив бесконечно малое перемещение, электронный блок 9 обработки определяет новый наклон траектории, новую скорость гранаты и т.д., пока не определит всю фактическую траекторию, соответствующую идеальному углу запуска pitch. В частности, на каждом этапе интегрирования траектории электронный блок 9 обработки проверяет, удовлетворяется ли первое или второе условия, где: р) первое условие удовлетворяется, когда Xi=Xi+Xi-1=XT (timp), и выбранный выстрел является настильным;q) второе условие удовлетворяется, когда Yi=Yi+Yi-1=YT(timp), изменение yi гранаты отрицательно, и выбранный выстрел является навесным (блок 310). Если первое р) и второе q) условия не удовлетворяются (выход НЕТ из блока 310), электронный блок 9 обработки снова выполняет описанные этапы в блоках 270, 280, 290, 300, 310, чтобы продолжить процесс "интегрирования" бесконечно малых перемещений гранаты для определения ее фактической траектории. Однако если одно или оба условия р) или q) удовлетворены (выход ДА из блока 310), то электронный блок 9 обработки проверяет (блок 320), удовлетворены ли третье и четвертое условия, где:r) третье условие удовлетворяется, когда перемещение Xi гранаты находится в диапазоне, ограниченном минимальным значением XT(timp)-errx и максимальным значением XT(timp)+errx; тогда какs) четвертое условие удовлетворяется, когда перемещение Yi гранаты находится в диапазоне, ограниченном минимальным значением YT(timp)-erry и максимальным значением YT(timp)+erry (блок 320). Если третье r) и четвертое s) условия удовлетворены (выход ДА из блока 320), электронный блок 9 обработки присваивает углу тангажа стрельбы значение угла тангажа, полученное способом, примененным на начальном этапе (т.е. в блоке 270) вычислительного цикла ipitch: fpitch=ipitch (блок 330). Если по меньшей мере одно из условий r) и s) не выполняется (выход НЕТ из блока 320), то электронный блок 9 обработки начинает вычислять новую траекторию (блок 340), в которой начальный уголipitch изменяется по соотношению s) в случае "настильного" выстрела, или по соотношению t) в случае где max(yi) - максимальное значение траектории по оси Y (показанной на фиг. 10). В этом случае электронный блок 9 обработки снова осуществляет вышеописанные этапы, предусмотренные в блоках 260-340. Вычислив угол тангажа стрельбы fpitch=ipitch, электронный блок 9 обработки вычисляет угол курса стрельбы fhead по следующему математическому соотношению u):head(timp) - азимутальная позиция цели k в момент попадания timp гранаты по самой цели k (блок 350). При этом электронный блок 9 обработки увеличивает счетчик Inum=Inum+1 (блок 360) и проверяетu) InumITMAX; где ITMAX - заранее определенный порог, указывающий максимальное количество итераций, которые могут быть произведены в течение заранее определенного интервала вычисления t; где MinDiff - заранее определенный порог. В случае, когда одно из условий u) и v) не удовлетворяется (выход НЕТ из блока 370), электронный блок 9 обработки предусматривает повторное выполнение операций блоков 220-370. Со ссылкой на фиг. 4d, если удовлетворены оба условия u) и v) (выход ДА из блока 370), электронный блок 9 обработки подтверждает задание угла тангажа стрельбы, и задает угол курса стрельбыfhead=fhead(Inum), предпочтительно, но необязательно, параметр ISP, указывающий момент разрыва гранаты, равным моменту попадания timp; расстояние до цели Disttarget равным диапазону значений дальностиGIT(timp) и параметр отсчета количества циклов NUMCI равным значению счетчика Inum (блок 380). В момент tact электронный блок 9 обработки определяет эффективный угол тангажа pitch(tact) и проверяет, удовлетворено ли следующее первое условие a1) (блок 400): где =fpitch-pitch(tact);S1 - заранее определенный порог. В положительном случае, т.е. если условие a1) удовлетворено (выход ДА из блока 400), электронный блок 9 обработки определяет, что угол тангажа pitch(tact) соответствует конечному углу тангажаfpitch, т.е. что гранатомет 1 имеет правильное положение тангажа (блок 410) и поэтому не требуется движений гранатомета 1, предназначенных для изменения самого угла тангажа pitch(tact). Электронный блок 9 обработки командует, посредством пользовательского интерфейса 8, поддерживать сегменты N1 и N2 в отключенном состоянии, чтобы сообщить оператору об отсутствии поворота,т.е. изменений угла тангажа, придаваемого гранатомету 1 (блок 410) (фиг. 8). В отрицательном случае (выход НЕТ из блока 400), т.е. если условие a1) не удовлетворено, электронный блок 9 обработки определяет целое число, присваиваемое неизвестному значению npitch для удовлетворения условия а 2): где Sa - заранее определенное угловое значение, связанное с каждым сегментом графического перекрестия (блок 420). При этом, если npitch имеет положительное значение, электронный блок 9 обработки управляет включением количества N1'=npitch светящихся сегментов графического перекрестия 18 положения посредством пользовательского интерфейса 8 (фиг. 5,7), тогда как, если npitch имеет отрицательное значение, электронный блок 9 обработки управляет включением количества N2'=npitch светящихся сегментов графического перекрестия 18 положения посредством пользовательского интерфейса 8 (блок 430) (фиг. 6). В момент tact электронный блок 9 обработки также определяет угол курса head(tact) и проверяет, удовлетворено ли следующее условие b1) (блок 450): где head(tact)=fhead-head(tact);S2 - заранее определенный порог. В положительном случае (выход ДА из блока 450), т.е. если условие b1) удовлетворено, электронный блок 9 обработки определяет, что угол курса head(tact) соответствует конечному углу курса fhead, т.е. что гранатомет 1 имеет правильное положение курса (блок 460) и поэтому не требует движений гранатомета 1, предназначенных для изменения самого угла курса head. Электронный блок 9 обработки командует, посредством пользовательского интерфейса 8, поддерживать сегменты N3 и N4 в отключенном положении, чтобы сообщить оператору об отсутствии вращений head, придаваемых гранатомету 1 (фиг. 5 и 8). В отрицательном случае, т.е. если условие b1) не удовлетворено, электронный блок 9 обработки определяет целое число, присваиваемое неизвестному значению nhead, для удовлетворения следующего условия b2):b2) head=nheadSa (блок 470). При этом, если nhead имеет положительное значение, электронный блок 9 обработки управляет включением количества N3'=nhead светящихся сегментов графического перекрестия 18 положения(фиг. 7), тогда как, если nhead имеет отрицательное значение, электронный блок 9 обработки управляет включением количества N4'=nhead светящихся сегментов графического перекрестия 18 положения (блок 480) (фиг. 6). В случае, когда соотношения a1) и b1) удовлетворены, электронный блок 9 обработки передает оператору правильное размещение гранатомета 1 в положении стрельбы (блок 500). В этом случае в примере, показанном на фиг. 8, электронный блок 9 обработки управляет отключением всех сегментов и предпочтительно, но не обязательно, включением центральной графической пиктограммы, содержащей,например, круг с центром в центре. При этом электронный блок 9 обработки проверяет, истек ли интервал вычисления t с момента осуществления операции в блоке 210 (блок 510), и в отрицательном случае (выход НЕТ из блока 510) остается в состоянии ожидания, а в положительном случае (выход ДА из блока 510) обновляет фактический момент tact, придавая ему значение текущего момента, измеренного, например, с помощью внутреннего тактового генератора (блок 520), и снова выполняет операцию, реализованную в блоке 200, и последующие операции. На основании вышеприведенного описания следует отметить, что вышеописанные операции, показанные на фиг. 4a-4d, можно кодировать в виде компьютерной программы, хранящейся в блоке 10 памяти и выполненной таким образом, что при ее загрузке в электронный блок 9 обработки последний выполняет соответствующие операции для помощи оператору в манипулировании гранатометом. Вышеописанное вспомогательное оптоэлектронное устройство обладает большими преимуществами, поскольку оно автоматически предоставляет военному оператору точное указание ориентации, придаваемой гранатомету, что позволяет ему успешно поражать движущуюся цель. Наконец, ясно, что в электронное устройство и способ его эксплуатации можно вносить изменения и вариации, не выходящие за рамки объема настоящего изобретения, определенные нижеследующей формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Оптоэлектронное цифровое устройство (2) для помощи оператору при определении положения стрельбы, придаваемого ручному гранатомету (1), для поражения движущейся цели (k) гранатой, причем упомянутое устройство (2) содержит электронные средства (6), (7) измерения, выполненные с возможностью измерять угол тангажа(pitch), угол курса (head), указывающие положение гранатомета (1), и расстояния (Disttarget) до цели (k) от ручного гранатомета (1); средство (8) пользовательского интерфейса, выполненное с возможностью принимать запрос на помощь оператору в первый момент работы (tact) и передавать показания об углах, чтобы гранатомет (1) мог поразить движущуюся цель (k); средство (10) памяти, содержащее данные (S, m, Cd, Ci, VIN, VIN1) боеприпасов, указывающие баллистические характеристики упомянутой гранаты, данные окружающей среды, указывающие параметры (р,R) окружающей среды, и данные (errx, erry) точности, указывающие требуемую точность попадания,причем упомянутое устройство (2) отличается тем, что содержит электронное средство (9) обработки, выполненное с возможностью измерять с помощью упомянутого электронного средства (7) измерения множество углов тангажа(pitch(tci и углов курса (head(tci, последовательно полученных от гранатомета (1) в заранее определенном диапазоне выборки данных, в течение которого оператор перемещает гранатомет (1) для поддержания его наведенным на движущуюся цель (k),измерять с помощью упомянутого электронного средства (6) измерения множество последовательно полученных расстояний Disttarget(tci) до цели (k) от гранатомета (1) в течение упомянутого диапазона выборки данных; определять математическую функцию перемещения (F(X), F(Y), F(Z, связанную с движением цели(k), на основании углов тангажа (pitch(tci, углов курса (heading(tci и расстояний (Disttarget(tci, измеренных в течение упомянутого диапазона выборки данных; определять идеальный угол тангажа (ipitch) и теоретический момент попадания (timp) гранаты по цели (k) с помощью упомянутой математической функции перемещения и на основании данных боеприпасов; определять на основании упомянутого идеального угла тангажа (ipitch), данных боеприпасов, данных окружающей среды и данных точности положение стрельбы, содержащее угол тангажа стрельбы(fpitch) и угол курса стрельбы (fhead), придаваемый гранатомету (1), чтобы граната поражала цель (k) в упомянутый момент попадания (timp); измерять с помощью упомянутого электронного средства (7) измерения фактический угол тангажа(pitch(tact и фактический угол курса heading(tact), указывающие положение, придаваемое оператором гранатомету (1) в упомянутый первый момент работы (tact); вычислять разность тангажа (pitch(tact между углом тангажа стрельбы (fpitch) и фактическим углом тангажа (pitch(tact, измеренным в упомянутый первый момент работы (tact); вычислять разность курса (head(tact между углом курса стрельбы (fhead) и фактическим углом курса (head(tact, измеренным в упомянутый первый момент работы (tact); передавать через упомянутый пользовательский интерфейс (8) данные, указывающие изменение угла тангажа и/или угла курса, которое оператор должен придать гранатомету (1), чтобы разность тангажа(pitch(tact и разность курса (head(tact, измеренные в упомянутый первый момент работы (tact), были равны нулю,-9 024098 причем упомянутое электронное средство (9) обработки также выполнено с возможностью определять начальный угол тангажа (ipitch) с помощью упомянутой математической функции перемещения (F(X), F(Y), F(Z на основании упомянутых данных боеприпасов и упомянутого момента попадания (timp); вычислять траекторию упомянутой гранаты на основании упомянутого начального угла тангажа(ipitch), упомянутых данных боеприпасов и упомянутых данных окружающей среды; изменять упомянутый начальный угол тангажа (ipitch), пока соответствующая траектория гранаты не удовлетворит условию сходимости к упомянутой цели (k); назначать упомянутому углу тангажа стрельбы (fpitch) угол тангажа (ipitch), соответствующий траектории гранаты, которая удовлетворяет упомянутому условию сходимости. 2. Устройство по п.1, в котором упомянутое электронное средство (9) обработки выполнено с возможностью принимать через упомянутое средство (8) интерфейса управление выбором типа выстрела по настильной траектории или типа выстрела по навесной траектории; в случае выбора выстрела по настильной траектории изменять упомянутый начальный угол тангажа в случае выбора выстрела по навесной траектории изменять упомянутый начальный угол тангажа где XT(timp) и YT(timp) - координаты позиции цели (k) в момент попадания;xi и yi - координаты позиции, занимаемой гранатой вдоль траектории в момент времени i, определенные относительно декартовой системы координат (S (X,Y,Z; иmax(yi) - максимальное значение координаты траектории гранаты по первой оси (Y) декартовой системы координат (S (X,Y,Z. 3. Устройство по п.2, в котором упомянутое электронное средство (9) обработки выполнено с возможностью вычислять упомянутый угол курса стрельбы (fhead) по следующему соотношению: где GITX - проекция перемещения гранаты вдоль сходящейся траектории на вторую ось (X) упомянутой декартовой системы координат (S (X,Y,Z. 4. Устройство по п.3, в котором упомянутое электронное средство (9) обработки выполнено с возможностью вычислять первое бесконечно малое перемещение (xi, yi), связанное с траекторией упомянутой гранаты, по упомянутым первой (Y) и второй (X) осям на основании упомянутого начального угла тангажа(ipitch), упомянутых баллистических данных и упомянутых данных окружающей среды по соотношениям:Cd - коэффициент аэродинамического сопротивления гранаты;Vin - скорость выстрела гранатой; вычислять первый угол наклона гранаты по соотношению вычислять скорость выстрела гранатой по соотношению последовательно вычислять бесконечно малые перемещения (xi, yi), связанные с траекторией упомянутой гранаты, по упомянутым первой (Y) и второй (X) осям на основании упомянутого начального угла тангажа (ipitch), упомянутых баллистических данных и упомянутых данных окружающей среды, где каждое вычисление производится по упомянутым соотношениям: 5. Устройство по п.4, в котором упомянутое электронное средство (9) обработки выполнено с возможностью определять условие сходимости упомянутой траектории к цели (k), когда первое или второе условие удовлетворено: упомянутое первое условие имеет место, если Xi=Xi+Xi-1XT(timp) и выбранный тип выстрела является выстрелом по настильной траектории; упомянутое второе условие имеет место, если Yi=yi+Yi-1YT(timp), изменение yi гранаты отрицательно и выбранный тип выстрела является выстрелом по навесной траектории. 6. Устройство по п.5, в котором упомянутое электронное средство (9) обработки выполнено с возможностью изменять упомянутый начальный угол тангажа (ipitch), когда третье или четвертое условие не удовлетворено, причем третье условие удовлетворяется, если позиция Xi гранаты содержится в диапазоне, определенном минимальным значением XT(timp)-errx и максимальным значением, соответствующим XT(timp)+errx, гдеerrx - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой второй оси (X), тогда как четвертое условие удовлетворяется, если значение Yi гранаты содержится в диапазоне, определенном минимальным значением YT(timp)-erry и максимальным значением, соответствующим YT(timp)+erry,где erry - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой первой оси (Y). 7. Устройство по п.6, в котором упомянутое средство (8) интерфейса содержит дисплей (14), отображающий графическое перекрестие (18) положения, снабженное множеством светящихся сегментов,размещенных выровненными один за другим с образованием первого (20) и второго (21) ответвлений положения, причем упомянутое электронное средство (9) обработки выполнено с возможностью включать/отключать сегменты первого ответвления (20) положения как функцию изменения угла тангажа (pitch), придаваемого гранатомету (1) для его ориентации в положение стрельбы; и/или сегменты второго ответвления (21) положения, ортогонального первому ответвлению (20) положения, как функцию изменения угла курса (head), придаваемого гранатомету (1) для его ориентации в положение стрельбы. 8. Способ наведения на цель посредством оптоэлектронного цифрового устройства по п.1, причем упомянутый способ отличается тем, что содержит этапы, на которых измеряют с помощью упомянутого электронного средства (7) измерения множество углов тангажа(pitch(tci и углов курса (head(tci, последовательно полученных гранатометом (1) в заранее определенном диапазоне выборки данных, в течение которого оператор перемещает гранатомет (1) для поддержания его наведенным на движущуюся цель (k); измеряют с помощью упомянутого электронного средства (6) измерения множество последовательно полученных расстояний Disttarget(tci) до цели (k) от гранатомета (1) в течение упомянутого диапазона выборки данных; определяют математическую функцию перемещения (F(X), F(Y), F(Z, связанную с движением упомянутой цели, на основании углов тангажа (pitch(tci, углов курса (heading(tci и расстояний (Disttarget(tci, измеренных в течение упомянутого диапазона выборки данных; определяют идеальный угол тангажа (ipitch) и теоретический момент попадания (timp) гранаты по цели (k) с помощью упомянутой математической функции перемещения и на основании данных боеприпасов; определяют на основании упомянутого идеального угла тангажа (ipitch) и данных боеприпасов положение стрельбы, содержащее угол тангажа стрельбы (fpitch) и угол курса стрельбы (fhead), придавае- 11024098 мые гранатомету (1), чтобы граната поражала цель (k) в упомянутый момент попадания (timp); измеряют с помощью упомянутого электронного средства (7) измерения фактический угол тангажа(pitch(tact и фактический угол курса (heading(tact, указывающие положение, придаваемое оператором гранатомету (1) в упомянутый первый момент работы (tact); вычисляют разность тангажа (pitch(tact между углом тангажа стрельбы (fpitch) и фактическим углом тангажа (pitch(tact, измеренным в упомянутый первый момент работы (tact); вычисляют разность курса (head(tact между углом курса стрельбы (fhead) и фактическим углом курса (head(tact, измеренным в упомянутый первый момент работы (tact); передают через упомянутый пользовательский интерфейс (8) данные, указывающие изменение угла тангажа и/или угла курса, которое оператор должен придать гранатомету (1), чтобы разность тангажа(pitch(tact и разность курса (head(tact, измеренные в упомянутый первый момент работы (tact), были равны нулю,причем способ также содержит этапы, на которых определяют начальный угол тангажа (ipitch) с помощью упомянутой математической функции перемещения (F(X), F(Y), F(Z на основании упомянутых данных боеприпасов и упомянутого момента попадания (timp); вычисляют траекторию упомянутой гранаты на основании упомянутого начального угла тангажа(ipitch) и упомянутых данных боеприпасов и упомянутых данных окружающей среды; изменяют упомянутый начальный угол тангажа (ipitch), пока соответствующая траектория гранаты не удовлетворит условию сходимости к упомянутой цели (k); назначают угол тангажа (ipitch), соответствующий траектории гранаты, которая удовлетворяет упомянутому условию сходимости, упомянутому углу тангажа стрельбы (fpitch). 9. Способ по п.8, содержащий этапы, на которых принимают через упомянутое средство (8) интерфейса управление выбором типа выстрела по настильной траектории или типа выстрела по навесной траектории; в случае выбора выстрела по настильной траектории изменяют упомянутый начальный угол тангажа (ipitch) по следующему соотношению: в случае выбора выстрела по навесной траектории изменяют упомянутый начальный угол тангажа где XT(timp) и YT(timp) - координаты позиции цели (k) в момент попадания; xi и yi - координаты позиции, занимаемой гранатой вдоль траектории в момент времени i, определенные относительно декартовой системы координат (S(X,Y,Z; и max(yi) - максимальное значение координаты траектории гранаты по первой оси (Y) декартовой системы координат (S(X,Y,Z. 10. Способ по п.9, содержащий этап вычисления упомянутого угла курса стрельбы (fhead) по следующему соотношению: где GITX - проекция перемещения гранаты вдоль сходящейся траектории на вторую ось (X) упомянутой декартовой системы координат (S(X,Y,Z. 11. Способ по п.10, содержащий этапы, на которых вычисляют первое бесконечно малое перемещение (xi, yi), связанное с траекторией упомянутой гранаты, по упомянутой первой (Y) и второй оси (X) на основании упомянутого начального угла тангажа(ipitch) и упомянутых баллистических данных и упомянутых данных окружающей среды, по соотношениям:Cd - коэффициент аэродинамического сопротивления гранаты;VIN - начальная скорость гранаты; вычисляют первый угол наклона гранаты по соотношению вычисляют скорость выстрела гранатой по соотношению последовательно вычисляют бесконечно малые перемещения (xi, yi), связанные с траекторией упомянутой гранаты, по упомянутым первой (Y) и второй (X) осям, на основании упомянутого начального угла тангажа (ipitch), упомянутых баллистических данных и упомянутых данных окружающей среды, где каждое вычисление производится по упомянутым соотношениям: 12. Способ по п.8, содержащий этапы, на которых определяют условия сходимости упомянутой траектории к цели (k), когда первое или второе условие удовлетворено: упомянутое первое условие имеет место, если Xi=Xi+Xi-1=XT(timp), и выбранный тип выстрела является выстрелом по настильной траектории; упомянутое второе условие имеет место, если Yi=Yi+Yi-1=YT(timp), изменение yi гранаты отрицательно и выбранный тип выстрела является выстрелом по навесной траектории. 13. Способ по п.8, содержащий этапы, на которых изменяют упомянутый начальный угол тангажа(ipitch), когда третье или четвертое условие не удовлетворено, причем третье условие удовлетворяется, если позиция Xi гранаты содержится в диапазоне, определенном минимальным значением XT(timp)-errx и максимальным значением, соответствующим XT(timp)+errx, гдеerrx - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой второй оси (X), тогда как четвертое условие удовлетворяется, если позиция Yi гранаты содержится в диапазоне, определенном минимальным значением YT(timp)-erry и максимальным значением, соответствующим YT(timp)+erry,где erry - значение упомянутых данных точности, которое указывает требуемую точность по упомянутой первой оси (Y). 14. Способ по п.13, в котором упомянутое средство (8) интерфейса содержит дисплей (14), предназначенный для отображения графического перекрестия (18) положения, снабженного множеством светящихся сегментов, размещенных выровненными один за другим с образованием первого (20) и второго(21) ответвлений положения, причем упомянутый способ содержит этапы, на которых включают/отключают сегменты первого положения как функцию изменения угла тангажа (pitch), придаваемого гранатомету (1) для его ориентации в положение стрельбы; и/или сегменты второго ответвления (21) положения, ортогонального первому ответвлению (20) положения, как функцию изменения угла курса (head), придаваемого гранатомету (1) для его ориентации в положение стрельбы.
МПК / Метки
МПК: F41G 3/06, F41G 3/14, F41G 1/44, F41G 1/48, F41G 1/473
Метки: оператору, движущейся, помощи, соответствующий, цели, эксплуатации, устройство, определении, стрельбы, оптоэлектронное, положения, цифровое, способ, ручному, придаваемого, поражения, гранатомету
Код ссылки
<a href="https://eas.patents.su/20-24098-optoelektronnoe-cifrovoe-ustrojjstvo-dlya-pomoshhi-operatoru-pri-opredelenii-polozheniya-strelby-pridavaemogo-ruchnomu-granatometu-dlya-porazheniya-dvizhushhejjsya-celi-i-sootvetst.html" rel="bookmark" title="База патентов Евразийского Союза">Оптоэлектронное цифровое устройство для помощи оператору при определении положения стрельбы, придаваемого ручному гранатомету, для поражения движущейся цели и соответствующий способ эксплуатации</a>
Электронное устройство для определения пространственного положения оружия и способ его работы
Номер патента: 23656
Опубликовано: 30.06.2016
Авторы: Галанти Марко, Сантини Никола, Маттонаи Лука
МПК: F41G 3/14, F41G 1/48, F41G 1/44...
Метки: определения, пространственного, способ, устройство, электронное, работы, оружия, положения
Формула / Реферат:
1. Устройство (1) определения углов пространственного положения оружия, устанавливаемое на оружии, включающее в себясредство (7) измерения ускорения, конфигурированное, чтобы измерять составляющие (Ax, Ay, Az) ускорения оружия по осям (XBODY, YBODY, ZBODY) первой системы координат (SBODY), связанной с оружием (1);средство (8) измерения угловой скорости, конфигурированное, чтобы измерять составляющие (Gx, Gy, Gz) угловой скорости оружия по осям...
Устройство и способ поперечной резки непрерывно движущейся ленты
Номер патента: 24027
Опубликовано: 31.08.2016
Автор: Хоульберг Енс
МПК: B23D 45/04, B23D 45/24
Метки: резки, устройство, способ, ленты, поперечной, движущейся, непрерывно
Формула / Реферат:
1. Устройство поперечной резки ленты на пути ее движения, содержащее станину, охватывающую путь движения ленты с двух сторон и содержащую боковую раму с каждой стороны пути движения ленты и верхнюю раму, расположенную между двумя боковыми рамами, два пильных диска, задающих линейную траекторию резания, по существу, перпендикулярную продольному направлению движения ленты, причем указанные пильные диски подвешены на маятниковых рычагах,...
Контрольное цифровое устройство транспортного средства
Номер патента: 22357
Опубликовано: 30.12.2015
Автор: Соколов Юрий Борисович
МПК: G07C 5/00
Метки: цифровое, контрольное, транспортного, средства, устройство
Формула / Реферат:
1. Контрольное цифровое устройство транспортного средства, содержащее управляющий процессор; защищенный процессор; криптопроцессор; батарею питания; блок памяти, в котором хранится оперативная информация; накопитель данных; средства отображения информации; блок клавиатуры; два карт-ридера с контроллерами для чтения и записи информации; защищенный модуль глобальной системы позиционирования; многофункциональный источник питания; интерфейсы и...
Устройство для удаления мелких частиц и соответствующий способ
Номер патента: 19065
Опубликовано: 30.12.2013
Автор: Магальди Марио
МПК: B65G 17/12, B65G 45/26
Метки: соответствующий, способ, мелких, частиц, устройство, удаления
Формула / Реферат:
1. Устройство (1) для удаления мелких частиц, откладывающихся на нижней части пластинчатого экстрактора или транспортера (8), пластины которого поддерживаются цепями или металлической лентой, причем указанное устройство выполнено с возможностью перемещения мелкого материала и имеет, по существу, петлевую конструкцию и выполнено с возможностью соединения с экстрактором или транспортером (8), содержащеенеподвижную раму (100);множество собирающих...
Устройство и способ определения положения кабины лифта
Номер патента: 22381
Опубликовано: 30.12.2015
Авторы: Лоукас Томми, Кангас Петтери, Мери Тимо
МПК: B66B 3/02
Метки: положения, кабины, устройство, лифта, способ, определения
Формула / Реферат:
1. Устройство для определения положения кабины (1) лифта относительно уровня этажа в шахте (2) лифта, отличающееся тем, что содержитизмерительное устройство (3), прикрепленное к кабине (1) лифта и выполненное с возможностью формирования электромагнитного радиочастотного измерительного сигнала (5);идентификатор (4) положения, установленный относительно шахты (2) лифта в районе указанного уровня этажа и содержащий два блока (9, 9') RFID, причем...
Предыдущий патент: Способ удаления аммонийного азота из органических сточных вод, содержащих навозную жижу
Следующий патент: Гетероциклические соединения для лечения или профилактики расстройств, вызываемых ослабленной нейротрансмиссией серотонина, норэпинефрина или допамина
Случайный патент: Способ улавливания металлов