Электронное устройство для определения пространственного положения оружия и способ его работы



Формула / Реферат
1. Устройство (1) определения углов пространственного положения оружия, устанавливаемое на оружии, включающее в себя
средство (7) измерения ускорения, конфигурированное, чтобы измерять составляющие (Ax, Ay, Az) ускорения оружия по осям (XBODY, YBODY, ZBODY) первой системы координат (SBODY), связанной с оружием (1);
средство (8) измерения угловой скорости, конфигурированное, чтобы измерять составляющие (Gx, Gy, Gz) угловой скорости оружия по осям (Gx, Gy, Gz) упомянутой системы координат (XBODY, YBODY, ZBODY), и обрабатывающее средство (10), сконфигурированное чтобы
вычислять фактические углы (Prc, Rro, Hrd) пространственного положения оружия в динамических условиях на основании составляющих угловой скорости (Gx, Gy, Gz) оружия,
определять статические углы (Psc, Rso, Hsd) пространственного положения оружия в статических условиях самого оружия на основании упомянутых составляющих (Ах, Ау, Az) ускорения оружия посредством фильтрации по нижней частоте упомянутых составляющих (Ах, Ау) ускорения оружия,
корректировать упомянутые составляющие (Gx, Gy, Gz) угловой скорости оружия на основании упомянутых статических углов (Psc, Rso, Hsd) пространственного положения и упомянутых фактических углов (Prc, Rro, Hrd) пространственного положения,
при этом устройство отличается тем, что оно дополнительно сконфигурировано, чтобы
определять первый статический угол пространственного положения оружия, соответствующий статическому углу тангажа (Psc(ti)) оружия на основании первой составляющей Ax(ti) ускорения оружия по первой оси (XBODY) упомянутой системы координат (SBODY) во время (ti) вычисления, причем упомянутая первая ось (XBODY) расположена коаксиально продольной оси CK ствола (3) упомянутого оружия (1),
определять второй статический угол пространственного положения, соответствующий статическому углу крена (Rso(ti)) оружия на основании второй составляющей ускорения оружия по второй оси (YBODY) упомянутой системы координат (SBODY) и упомянутому определенному упомянутому статическому тангажу (Psc(ti)) во время (ti) вычисления, причем упомянутая вторая ось (YBODY) ориентирована к правой стороне опорной рамы оружия (1),
определять третий фактический угол пространственного положения, соответствующий фактическому углу курса H(ti) оружия, на основании упомянутых составляющих (Gx, Gy) угловой скорости оружия, фактических углов тангажа (Prc(ti-1)) и крена (Rro(ti-1)), как определено во время (ti-1) вычисления, предшествующее текущему времени (ti) вычисления.
2. Устройство по п.1, в котором упомянутое обрабатывающее средство (10) сконфигурировано, чтобы определять первый статический угол пространственного положения оружия, соответствующий статическому тангажу (Psc(ti)), посредством осуществления следующего математического отношения:
причем Ax(ti) является первой составляющей ускорения оружия по первой оси (XBODY) упомянутой системы координат (SBODY) во время ti вычисления.
3. Устройство по любому из пп.1 или 2, в котором упомянутое обрабатывающее средство (10) сконфигурировано, чтобы определять второй статический угол пространственного положения, соответствующий статическому крену (Rso(ti)), посредством осуществления следующего математического отношения:
причем Ay(ti) является второй составляющей ускорения оружия по второй оси (YBODY) упомянутой системы координат (SBODY).
4. Устройство по п.3, в котором упомянутое электронное обрабатывающее средство (10) сконфигурировано, чтобы
получать во время (ti) вычисления фактические углы пространственного положения, включающие в себя тангаж (Prc(ti-1)), крен (Rro(ti-1)) и курс (Hrd(ti-1)), определенные во время (ti-1) вычисления, предшествующее текущему времени (ti) вычисления,
определять корректировочные коэффициенты5. Устройство по п.4, в котором упомянутое электронное обрабатывающее средство (10) сконфигурировано, чтобы
определять первый корректировочный коэффициент (вычислять дифференциал тангажа (dP(ti)) посредством отношения
вычислять скорректированный дифференциал тангажа (dPc(ti)) посредством вычитания упомянутого первого корректировочного коэффициента (Gx) из упомянутого дифференциала тангажа dP(ti) и
интегрировать упомянутый скорректированный дифференциал тангажа (dPc(ti)) по времени, чтобы определить фактический угол тангажа (Prc(ti)).
6. Устройство по п.4, в котором упомянутое электронное обрабатывающее средство (10) сконфигурировано, чтобы
определять второй корректировочный коэффициент (вычислять дифференциал крена (dR(ti)) посредством отношения
вычислять скорректированный дифференциал крена (dRc(ti)) посредством вычитания упомянутого корректировочного коэффициента (![]() ) из упомянутого дифференциала крена dR(ti) и
) из упомянутого дифференциала крена dR(ti) и
интегрировать упомянутый скорректированный дифференциал крена (dRc(ti)) по времени, чтобы определить фактический угол крена (Rro(ti)).
7. Устройство по любому из предыдущих пунктов, в котором упомянутое обрабатывающее средство сконфигурировано, чтобы
вычислять дифференциал курса (dH(ti)) посредством следующего математического отношения:

интегрировать дифференциал курса (dH(ti)) по времени, чтобы определить фактический угол курса (H(ti)).
8. Способ определения углов пространственного положения оружия с использованием устройства по п.1, включающий в себя
измерение составляющих (Ах, Ау, Az) ускорения оружия (1) по осям (XBODY, YBODY, ZBODY) первой системы (SBODY) координат, связанной с оружием (2);
измерение составляющих (Gx, Gy, Gz) угловой скорости оружия по осям (XBODY, YBODY, ZBODY) упомянутой системы (SBODY) координат и
вычисление фактических углов (Prc, Rro, Hrd) пространственного положения оружия в динамических условиях на основании составляющих угловой скорости (Gx, Gy, Gz),
определение статических углов (Psc, Rso, Hsd) пространственного положения оружия в статических условиях оружия на основании упомянутых составляющих (Ах, Ау, Az) ускорения посредством фильтрации по нижней частоте упомянутых составляющих (Ах, Ау) ускорения,
корректировку упомянутых составляющих (Gx, Gy, Gz) угловой скорости на основании упомянутых статических углов (Psc, Rso, Hsd) пространственного положения и упомянутых фактических углов (Prc, Rro, Hrd) пространственного положения,
при этом способ отличается тем, что в нем
определяют первый статический угол пространственного положения оружия, соответствующий статическому углу тангажа (Psc(ti)) оружия, на основании первой составляющей Ax(ti) ускорения оружия по первой оси (XBODY) упомянутой системы координат (SBODY) во время (ti) вычисления, причем упомянутая первая ось (XBODY) расположена коаксиально продольной оси (CK) ствола (3) упомянутого оружия (1),
определяют второй статический угол пространственного положения, соответствующий статическому углу крена (Rso(ti)) оружия, на основании второй составляющей ускорения оружия по второй оси (YBODY) упомянутой системы координат (SBODY) и упомянутому определенному упомянутому статическому тангажу (Psc(ti)) во время (ti) вычисления, причем упомянутая вторая ось (YBODY) ориентирована к правой стороне опорной рамы оружия (1),
определяют третий фактический угол пространственного положения, соответствующий фактическому углу курса H(ti) оружия, на основании упомянутых составляющих (Gx, Gy) угловой скорости оружия, фактических углов тангажа (Prc(ti-1)) и крена (Rro(ti-1)), как определено во время (ti-1) вычисления, предшествующее текущему времени (ti) вычисления.
9. Способ по п.8, включающий в себя этап определения первого статического угла пространственного положения оружия, соответствующего статическому тангажу (Psc(ti)), посредством осуществления следующего математического отношения:
причем Ax(ti) является первой составляющей ускорения оружия по первой оси (XBODY) упомянутой системы координат (SBODY) во время (ti) вычисления.
10. Способ по любому из пп.8 или 9, включающий в себя этап определения второго статического угла пространственного положения, соответствующего статическому крену (Rso(ti)), посредством осуществления следующего математического отношения:
причем Ay(ti) является второй составляющей ускорения оружия (1) по второй оси (YBODY) упомянутой системы координат (SBODY).
11. Способ по п.10, включающий в себя этап
получения во время (ti) вычисления фактических углов пространственного положения, включающих в себя тангаж (Prc(ti-1)), крен (Rro(ti-1)) и курс (Hrd(ti-1)), определенных во время (ti-1) вычисления, предшествующее текущему времени (ti) вычисления,
определения корректировочных коэффициентов (ex, ey) упомянутых составляющих (Gx, Gy) угловой скорости, как функции разности между упомянутым динамическим тангажем (Prc(ti-1)), динамическим креном (Rro(ti-1)), как определено во время (ti-1) вычисления, предшествующее текущему времени (ti), и упомянутым статическим тангажем (Psc(ti-1)) и, соответственно, статическим креном Rso(ti1), как определено в текущее время (ti) вычисления.
12. Способ по п.11, включающий в себя этап
определения первого корректировочного коэффициента (Gx) посредством вычисления разности между упомянутым фактическим углом тангажа (Prc (ti-1)), вычисленным во время (ti-1), предшествующее текущему времени (ti) вычисления, и статическим углом тангажа (Psc(ti)), вычисленным в текущее время (ti) вычисления,
вычисления дифференциала тангажа (dP(ti)) посредством отношения
вычисления скорректированного дифференциала тангажа (dPc(ti)) посредством вычитания упомянутого первого корректировочного коэффициента (ex) из упомянутого дифференциала тангажа dP(ti) и
интегрирования упомянутого скорректированного дифференциала тангажа (dPc(ti)) по времени, так чтобы определить фактический угол тангажа (Prc(ti)).
13. Способ по п.12, включающий в себя этапы
определения второго корректировочного коэффициента (ey) посредством вычисления разности между упомянутым фактическим углом крена (Pro(ti-1)), вычисленным во время (ti-1), предшествующее текущему времени (ti) вычисления, и упомянутым статическим углом крена (Pro(ti)), вычисленным в текущее время (ti) вычисления,
вычисления дифференциала крена (dR(ti)) посредством отношения
вычисления скорректированного дифференциала крена (dRc(ti)) посредством вычитания упомянутого корректировочного коэффициента (![]() ) из упомянутого дифференциала крена dR(ti) и
) из упомянутого дифференциала крена dR(ti) и
интегрирования упомянутого скорректированного дифференциала крена (dRc(ti)) по времени, чтобы определить фактический угол крена (Rro(ti)).
14. Способ по любому из пп.8-13, включающий в себя этапы
вычисления дифференциала курса (dH(ti)) посредством следующего математического отношения:

интегрирования дифференциала курса (dH(ti)) по времени, чтобы определить фактический угол курса (H(ti)).

Текст
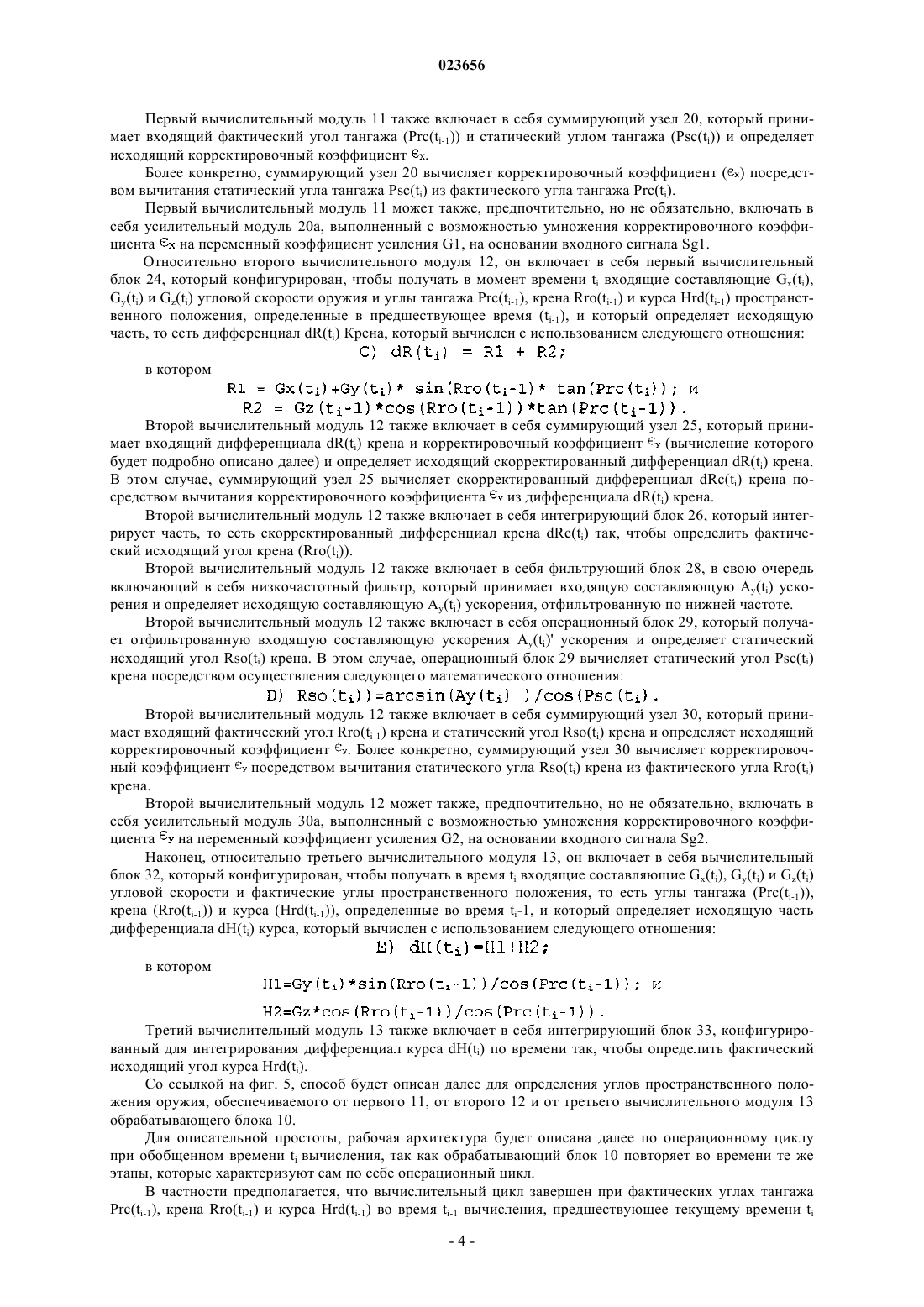
ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОРУЖИЯ И СПОСОБ ЕГО РАБОТЫ Устройство для определения углов пространственного положения оружия (1) включает в себя множество акселерометров для измерения составляющих (Ах, Ау, Az) ускорения оружия (2) по осям (Xbody, Ybody, Zbody) первой системы координат (body), объединенной с оружием (2); множество гироскопов (8), сконфигурированных таким образом, чтобы измерять составляющие угловой скорости (Gx, Gy, Gz) оружия по осям (Xbody, Ybody, Zbody) координатного тела (body),и обрабатывающий блок (10), сконфигурированный для вычисления множества фактических углов пространственного положения оружия (Prc, Rro, Hrd) в динамических условиях, на основании составляющих угловой скорости (Gx, Gy, Gz); определения множества статических углов пространственного положения оружия (Psc, Rso, Hsd) в статических условиях оружия, на основании составляющих ускорения (Ах, Ау, Az); коррекции составляющих угловой скорости (Gx,Gy, Gz) в соответствии со статическими углами пространственного положения (Psc, Rso, Hsd) и с фактическими углами пространственного положения (Prc, Rro, Hrd). Область техники, к которой относится изобретение Настоящее изобретение относится к электронному устройству для определения пространственного положения оружия и к способу его работы. Более конкретно, настоящее изобретение относится к электронному устройству, присоединяемому к оружию, в частности к гранатомету, для определения в соответствующие моменты времени углов Тангажа, Крена и Курса оружия; в отношении чего представлено детальное раскрытие, которое, следует трактовать и в обобщенном смысле. Уровень техники В области ручного оружия, и, в частности, гранатометов, известна потребность в возможности определять мгновенное пространственное положение оружия, чтобы использовать такую информацию в баллистических вычислительных программах, приспособленных для обеспечения в режиме реального времени оператора, выполняющего прицеливание оружия, указаниями в отношении пространственного положения стрельбы, которое должно быть придано оружию для поражения цели. В патенте США 7296358 раскрыто электронное устройство для обнаружения и индикации вертикального угла для использования на системах прицеливания, предназначенных для прицелов луков и иных прицельных приспособлений для метательного оружия. Улучшенное измерение вертикального уровня и средство отображения минимизируют лево-правосторонний снос метательного снаряда посредством обнаружения и индикации пользователю отклонения метательного оружия несколько раннее выпуска метательного снаряда. В документе VAGANAY J. ЕТ, озаглавленном "оценка пространственного положения мобильного робота посредством слияния инерциальных данных" (Материалы международной конференции по робототехнике и автоматике Атланта, 2-6 Мая 1993 г.) раскрыта система оценки пространственного положения, основанная на инерциальных измерениях для мобильного робота, в котором использованы пять недорогих инерциальных датчиков. В патенте США 636826 раскрыт датчик угловой ориентации, использующий гироскопы для определения угловых скоростей по X-, Y- и Z-, которые интегрированы по времени для получения углов тангажа, крена и курса (гамма, бета, альфа) ориентации. Два акселерометра используют для получения предварительных углов тангажа, крена для того, чтобы корректировать углы тангажа и крена, а два наземных магнитометра используют для получения предварительного угла рыскания, чтобы корректировать угол рыскания. Когда предварительные углы тангажа, крена и рыскания определены точно (50), интегрированные углы тангажа, крена и рыскания корректируют (60) посредством предварительных углов тангажа, крена и рыскания. Сущность изобретения Для решения этой задачи изготовителями оружия были предприняты различные усилия, чтобы разработать электронное устройство вышеописанного типа, которое является доступным в производстве,имеет уменьшенные общий вес и объем, чтобы не повлиять существенно на маневренность оружия, и одновременно является быстрым и точным в обеспечении указания на пространственное положение, но многое еще остается сделать. Таким образом, задачей настоящего изобретения является создание в особенности легкого и доступного электронного устройства, которое способно определять в режиме реального времени, то есть с чрезвычайной быстротой и с высокой точностью, пространственное положение оружия, на котором установлено само устройство. В соответствии с настоящим изобретением выполнено электронное устройство для определения пространственного положение оружия, как охарактеризовано в п.1 формулы изобретения и предпочтительно, но не обязательно в любой из других пунктов формулы изобретения прямо или косвенно зависимых от п.1 формулы. В соответствии с настоящим изобретением также предложен способ определения мгновенного пространственного положения оружия, как определено в п.8 формулы изобретения и, предпочтительно, но не обязательно, в любом из пунктов формулы изобретения прямо или косвенно зависимых от п.8 формулы изобретения. В соответствии с настоящим изобретением обеспечен и компьютерный продукт, загружаемый в память компьютера, для определения при выполнении последним пространственного положения оружия,как определено в п.15 формулы изобретения, и предпочтительно, но не обязательно, в любом из пунктов формулы изобретения, прямо или косвенно зависимых от п.15 формулы изобретения. Перечень фигур чертежей Настоящее изобретение будет раскрыто далее со ссылкой на сопровождающие чертежи, на которых представлен неисчерпывающий пример варианта осуществления этого изобретения и на которых: фиг. 1 - схематически показывает электронное устройство для определения пространственного положения оружия, выполненное в соответствии с настоящим изобретением; фиг. 2 - структурная схема электронного устройства, представленного на фиг. 1; фиг. 3 - структурная схема блока обработки в электронном устройстве, представленном на фиг. 1; фиг. 4 - показывает первую систему координат, связанную с оружием, на котором установлено электронное устройство, представленное на фиг. 1; фиг. 5 - блок-схема операций, осуществляемых электронным устройством, представленным на фиг. 1; фиг. 6, 7 и 8 - схематически показывают некоторые системы координат, используемые электронным устройством для определения пространственного положения оружия. Осуществление изобретения Настоящее изобретение, по существу, основано на идее создания электронного устройства, которое выполнено с возможностью: определения составляющих ускорения оружия по осям системы координат, совпадающей с некоторыми осями оружия, таким образом, что перемещение оружия в пространстве определяет такое же перемещение системы координат; определения составляющих угловой скорости оружия по осям системы координат; определения углов пространственного положения оружия, обозначенных ниже статическими углами пространственного положения, на основании составляющих ускорения, отфильтрованных низкочастотным фильтром; причем статические углы пространственного положения определяют, по существу, в статичном состоянии, в котором оружие является неподвижным или перемещаемым с пренебрегаемой скоростью, то есть меньшей, чем заранее установленный минимальный порог; определения множества фактических углов пространственного положения оружия, посредством интегрирования составляющих угловой скорости по времени; определения некоторых корректировочных коэффициентов в соответствии с разностью между фактическими углами пространственного положения и статическими углами пространственного положения; корректировки составляющих угловой скорости оружия на основании соответствующих корректировочных коэффициентов. Как это станет очевидно из нижеследующего, упомянутая выше идея с одной стороны предполагает задействование составляющих ускорения, отфильтрованных на низкой частоте для определения углов пространственного положения оружия в статическом состоянии таким образом, чтобы иметь возможность определить начальный угол пространственного положения, например на этапе установки, и, с другой стороны, корректировать ошибки, вносимые электронными измерительными приборами в составляющие скорости. Для наилучшего раскрытия сущности настоящего изобретения, прежде всего, необходимо определить математический аппарат, который описывает трехмерные системы координат, используемые при вычислении углов пространственного положения оружия. В частности, далее делается ссылка на две различные трехмерные системы координат, первая из которых является подвижной системой координат, связанной с оружием (показана на фиг. 4 и 8), тогда как вторая система координат является неподвижной и, по существу, связана с четырьмя сторонами света(показаны на фиг. 4 и 6). В этом случае применительно к примеру, показанному на фиг. 4 и 8, первая система координат,обозначенная ниже как система координат BODY BODY, связана с оружием, и имеет три оси координат,ортогональные друг другу, причем первая ось XBODY коаксиальна с продольной осью СК оружия; вторая ось YBODY расположена в направлении, перпендикулярном правой стороне оружия и первой оси XBODY, а третья ось ZBODY ориентирована в направлении, перпендикулярном нижней стороне оружия и плоскости,в которой лежат первая XBODY и вторая YBODY оси. Относительно второй системы координат она обозначена далее, как система NED NED (показана на фиг. 4 и 6) и имеет первую ось XNED, ориентированную на географический север Земли; вторую ось YNED,ориентированную на географический восток Земли; и третью ось ZNED, ориентированную к плоскости,которой является земля, то есть поверхность земли, таким способом, чтобы быть ортогональной к ней и к плоскости, в которой лежат первая XNED и вторая YNED оси. Более конкретно, составляющие угловой скорости и составляющие ускорения будут выражены далее посредством векторов на основании системы координат BODY BODY; тогда как углы пространственного положения Тангажа, Крена и Курса будут определены далее по отношению к системе координатNED NED. По отношению к фиг. 1 ссылочной позицией 1 обозначено электронное устройство в целом, конфигурированное, чтобы определять углы пространственного положения тангажа, крена и курса ручного оружия 2. В примере, представленном на фиг. 1, оружие 2, по существу, включает в себя ствол 3, который проходит вдоль продольной оси СК, и опорную раму 4 ствола, снабженную рукояткой 5, приспособленной для обеспечения захвата оружия стрелком и для удобного ориентирования ствола 3 в пространстве,чтобы поразить цель. Что касается электронного устройства 1, то оно связано с оружием 2 и включает в себя инерциальную электронную платформу 6, сконфигурированную, чтобы определить исходящие составляющие (Ax,Ay, Az) ускорения и составляющие (Gx, Gy, Gz) угловой скорости оружия 2, определенные по отношению к системе BODY координат BODY (корпус). В этом случае инерциальную электронную платформу 6 конфигурируют таким образом, чтобы определять три составляющие (Ax, Ay, Az) ускорения и три составляющие (Gx, Gy, Gz) угловой скорости оружия 2 в соответствующих осях XBODY, YBODY и ZBODY системы BODY координат BODY (корпус). В примере, показанном на фиг. 1 и 4, координатная ось XBODY расположена коаксиально с продольной осью СК ствола 3 оружия; координатная ось YBODY ориентирована к правой стороне опорная рама 4 оружия 2 в состоянии удержания оружия за рукоятку, условии захвата оружия, таким образом, чтобы быть ортогональной первой координатной оси XBODY; тогда как координатная ось ZBODY ориентирована в пространство ниже рамы оружия 2 в состоянии удержания оружия за рукоятку и перпендикулярно координатной оси YBODY. В примере, показанном на фиг. 2, инерциальная электронная платформа 6 обычно включает в себя один или несколько акселерометров 7, например двухосный акселерометр или два одноосных акселерометра, имеющих две измерительных оси по осям XBODY и YBODY системы BODY координат BODY (корпус). Инерциальная электронная платформа 6 также включает в себя один или несколько гироскопов 8,предпочтительно, но не обязательно, трехосный гироскоп, глобально имеющих три измерительных оси,расположенные параллельно осям XBODY, YBODY и ZBODY системы BODY координат BODY (корпус). Кроме того, электронное устройство 2 включает в себя обрабатывающий блок 10, который получает исходящие составляющие (Ax, Ay, Az) ускорения и составляющие (Gx, Gy, Gz) угловой скорости, измеренные инерциальной электронной платформой 6, и обрабатывает их в соответствии с вычислительным способом, подробно описанным далее, который в каждый последовательный момент определяет реальные/фактические исходящие углы пространственного положения оружия 2, то есть определенные угол Тангажа Prc, угол Крена Rro и угол Курса Hrd, относительно системы NED координат NED. Более конкретно, как это представлено на фиг. 2, обрабатывающий блок 10, по существу, включает в себя три вычислительных модуля. Более конкретно, первый вычислительный модуль 11 получает во все моменты времени ti вычисления входящую составляющую Ax(ti) ускорения, составляющие Gx(ti), Gy(ti) и Gz(ti) угловой скорости оружия и фактические углы пространственного положения, то есть углы тангажа (Prc(ti-1, крена (Rro(ti-1 и курса (Hrd(ti-1, вычисленные во время (ti-1) вычисления, предшествующее текущему времени вычисления (ti), и определяет фактический исходящий угол тангажа Prc(ti). Второй вычислительный модуль 12 конфигурирован так, чтобы получать, во все моменты времениti вычисления входящую составляющую Ay(ti) ускорения, входящие составляющие Gx(ti), Gy(ti) и Gz(ti) угловой скорости и фактические углы, то есть углы тангажа (Prc(ti-1, крена (Rro(ti-1 и курса (Hrd(ti-1,вычисленные во время (ti-1) вычисления, предшествующее текущему времени вычисления (ti), и определяет фактический исходящий угол крена Rro(ti). Вместо этого третий вычислительный модуль 13 получает во все моменты времени ti вычисления входящую составляющую Az(ti) ускорения, составляющие Gx(ti), Gy(ti) и Gz(ti) угловой скорости и фактические углы пространственного положения, то есть углы тангажа (Prc(ti-1, крена (Rro(ti-1 и курса(Hrd(ti-1, вычисленные во время (ti-1) вычисления, предшествующее текущему времени вычисления (ti),и определяет фактический исходящий угол курса Hrd(ti-1). В частности, первый вычислительный модуль 11 включает в себя первый вычислительный блок 14,который конфигурирован, чтобы получать, во все моменты времени ti входящие составляющие Gx(tx),Gy(ti) и Gz(ti) угловой скорости и фактические углы тангажа (Prc(ti-1, крена (Rro(ti-1 и курса (Hrd(ti-1,определенные в предшествующее время ti-1 вычисления, и определяет исходящую часть дифференциалаdP(ti) тангажа, которую вычисляют используя следующее отношение: Первый вычислительный модуль 11 также включает в себя суммирующий узел 15, который принимает входящий дифференциала dP(ti) тангажа и корректировочный коэффициент (вычисление которого будет подробно описано далее) и определяет исходящий скорректированный дифференциал dP(ti) тангажа. В этом случае, суммирующий узел 15 вычисляет скорректированный дифференциал dP(ti) тангажа посредством вычитания корректировочного коэффициента из дифференциала dP(ti) тангажа. Первый вычислительный модуль 11 также включает в себя интегрирующий блок 16, который интегрирует скорректированный дифференциал тангажа dPc(ti) по времени так, чтобы определять фактический исходящий угол тангажа (Prc(ti. Первый вычислительный модуль 11 также оборудован фильтрующим блоком 18, предпочтительно включающим в себя низкочастотный фильтр, который получает входящую составляющую Ax(ti) и определяет исходящую составляющую ускорения Ax(ti), отфильтрованную по нижней частоте. Первый вычислительный модуль 11 также включает в себя операционный блок 19, который получает отфильтрованную входящую составляющую ускорения Ax(ti)' и определяет статический исходящий угол тангажа Psc(ti). В этом случае, операционный блок 19 вычисляет статический угол тангажа Psc(ti) посредством осуществления следующего математического отношения: Первый вычислительный модуль 11 также включает в себя суммирующий узел 20, который принимает входящий фактический угол тангажа (Prc(ti-1 и статический углом тангажа (Psc(ti и определяет исходящий корректировочный коэффициент . Более конкретно, суммирующий узел 20 вычисляет корректировочный коэффициент ( ) посредством вычитания статический угла тангажа Psc(ti) из фактического угла тангажа Prc(ti). Первый вычислительный модуль 11 может также, предпочтительно, но не обязательно, включать в себя усилительный модуль 20 а, выполненный с возможностью умножения корректировочного коэффициента на переменный коэффициент усиления G1, на основании входного сигнала Sg1. Относительно второго вычислительного модуля 12, он включает в себя первый вычислительный блок 24, который конфигурирован, чтобы получать в момент времени ti входящие составляющие Gx(ti),Gy(ti) и Gz(ti) угловой скорости оружия и углы тангажа Prc(ti-1), крена Rro(ti-1) и курса Hrd(ti-1) пространственного положения, определенные в предшествующее время (ti-1), и который определяет исходящую часть, то есть дифференциал dR(ti) Крена, который вычислен с использованием следующего отношения: в котором Второй вычислительный модуль 12 также включает в себя суммирующий узел 25, который принимает входящий дифференциала dR(ti) крена и корректировочный коэффициент (вычисление которого будет подробно описано далее) и определяет исходящий скорректированный дифференциал dR(ti) крена. В этом случае, суммирующий узел 25 вычисляет скорректированный дифференциал dRc(ti) крена посредством вычитания корректировочного коэффициента из дифференциала dR(ti) крена. Второй вычислительный модуль 12 также включает в себя интегрирующий блок 26, который интегрирует часть, то есть скорректированный дифференциал крена dRc(ti) так, чтобы определить фактический исходящий угол крена (Rro(ti. Второй вычислительный модуль 12 также включает в себя фильтрующий блок 28, в свою очередь включающий в себя низкочастотный фильтр, который принимает входящую составляющую Ay(ti) ускорения и определяет исходящую составляющую Ay(ti) ускорения, отфильтрованную по нижней частоте. Второй вычислительный модуль 12 также включает в себя операционный блок 29, который получает отфильтрованную входящую составляющую ускорения Ay(ti)' ускорения и определяет статический исходящий угол Rso(ti) крена. В этом случае, операционный блок 29 вычисляет статический угол Psc(ti) крена посредством осуществления следующего математического отношения: Второй вычислительный модуль 12 также включает в себя суммирующий узел 30, который принимает входящий фактический угол Rro(ti-1) крена и статический угол Rso(ti) крена и определяет исходящий корректировочный коэффициент . Более конкретно, суммирующий узел 30 вычисляет корректировочный коэффициент посредством вычитания статического угла Rso(ti) крена из фактического угла Rro(ti) крена. Второй вычислительный модуль 12 может также, предпочтительно, но не обязательно, включать в себя усилительный модуль 30 а, выполненный с возможностью умножения корректировочного коэффициента на переменный коэффициент усиления G2, на основании входного сигнала Sg2. Наконец, относительно третьего вычислительного модуля 13, он включает в себя вычислительный блок 32, который конфигурирован, чтобы получать в время ti входящие составляющие Gx(ti), Gy(ti) и Gz(ti) угловой скорости и фактические углы пространственного положения, то есть углы тангажа (Prc(ti-1,крена (Rro(ti-1 и курса (Hrd(ti-1, определенные во время ti-1, и который определяет исходящую часть дифференциала dH(ti) курса, который вычислен с использованием следующего отношения: в котором Третий вычислительный модуль 13 также включает в себя интегрирующий блок 33, конфигурированный для интегрирования дифференциал курса dH(ti) по времени так, чтобы определить фактический исходящий угол курса Hrd(ti). Со ссылкой на фиг. 5, способ будет описан далее для определения углов пространственного положения оружия, обеспечиваемого от первого 11, от второго 12 и от третьего вычислительного модуля 13 обрабатывающего блока 10. Для описательной простоты, рабочая архитектура будет описана далее по операционному циклу при обобщенном времени ti вычисления, так как обрабатывающий блок 10 повторяет во времени те же этапы, которые характеризуют сам по себе операционный цикл. В частности предполагается, что вычислительный цикл завершен при фактических углах тангажаPrc(ti-1), крена Rro(ti-1) и курса Hrd(ti-1) во время ti-1 вычисления, предшествующее текущему времени ti вычисления. Во время ti вычисления, способ по существу обеспечивает осуществление следующих этапов: выборки составляющих AX(ti), AY(ti), AZ(ti) и составляющих Gx(ti), Gy(ti), Gz (ti) угловой скорости,как измерено посредством инерциальной электронной платформы 6 (блок 100); получения фактических углов тангажа Prc(ti-1), крена Rro(ti-1) и курса Hrd(ti-1), определенных в цикле, предшествующем времени ti-1 к текущему времени ti (блок 110); фильтрации составляющих AX(ti) и AY(ti) по нижней частоте (блок 120); вычисления статического угла Psc(ti) тангажа посредством осуществления следующего математического отношения:(блок 130); вычисления статического угла Rso(ti) крена посредством осуществления следующего математического отношения:(блок 140); определения корректировочного коэффициента посредством вычисления разницы между реальным углом Prc(ti-1) тангажа, вычисленным во время ti-1 в вычислительном цикле, предшествующем текущему, и статическим углом Psc(ti) тангажа (блок 150); определения корректировочного коэффициента посредством вычисления разницы между реальным углом Rro(ti-1) крена, вычисленным во время ti-1 в вычислительном цикле, предшествующем текущему, и статическим углом Rso(ti) крена (блок 160); вычисления дифференциала тангажа dP(ti) (блок 170), посредством отношения: вычисления дифференциала Крена dR(ti) (блок 18 0) посредством следующего отношения: вычисления скорректированного дифференциала dPc(ti) тангажа посредством вычитания корректировочного коэффициента из дифференциала dP(ti) тангажа (блок 190); вычисления скорректированного дифференциала dRc(ti) крена посредством вычитания корректировочного коэффициента из упомянутого дифференциала dR(ti) крена (блок 200); вычисления дифференциала курса dH(ti) (блок 210) посредством следующего математического отношения: и интегрирования скорректированного дифференциала dPc(ti) тангажа по времени, так чтобы определить фактический исходящий угол тангажа (Prc(ti) (блок 220); интегрирования скорректированного дифференциала dRc(ti) крена по времени, так чтобы опредить фактический исходящий угол Rro(ti) крена (блок 230); интегрирования дифференциала dH(ti) курса по времени, так чтобы определить фактический уголH(ti) курса (блок 240). Из вышеприведенного описания уместно отметить, что вышеописанные математические отношения А), В), С), D) и Е) можно получить на основании следующих математически-матричных соображений. В частности, абсолютная скорость оружия обозначена здесь и далее, как WBH. В этом случае букваW указывает, что типом величины при рассмотрении является угловая скорость; подстрочный символ B указывает, что рассматривают угловую скорость в системе BODY координат корпуса (BODY), а н указывает, что рассматривают абсолютную скорость. В дальнейшем будет использован и третий подстрочный символ, который идентифицирует систему координат, относительно которой выражена величина при рассмотрении. Таким образом, абсолютная угловая скорость оружия может быть выражена как сумма трех векторов, написанная в трех указанных координатах: Можно выразить угловой вектор скорости в системе BODY координат оружия посредством матриц поворота: При замене таким образом полученных выражений для матриц поворота WBHB становится Составляющие Gx, Gy и Gz у WBHB представляют собой составляющие угловой скорости, измеренной имеющим три оси гироскопом, с осями ориентированными параллельно осям системы координат КОРПУСА, связанной с оружием. Для того, чтобы получить углы тангажа, крена и курса пространственного положения оружия, начиная с составляющих Gx, Gy и Gz угловой скорости, измеренной гироскопом, связанным с оружием,имеется необходимость инвертировать и интегрировать таким образом полученные отношения, то есть выразить , и в соответствии с составляющими WBHB, которые точно являются измеренными величинами. Таким образом, справедливы следующие матричные отношения: Из полученного выше можно использовать более компактное отношение, таким образом получая следующую систему, которая описывает отношения В), D) и Н): Однако применительно к отношениям А) и С), вместо этого справедливы следующие соображения. Исходя из расположения трех акселерометров с измерительными осями параллельно осям системыBODY координат корпуса, связанной с оружием, они измеряют три составляющих Ax, Ay и Az ускорения. В статическом состоянии эти три акселерометра измеряют составляющие ускорения силы тяжести в системе BODY координат корпуса, таким образом, получаем следующее: Таким образом, из выражения AGNHN возможно получить только углы тангажа и крена пространственного положения при статических условиях, так как когда существует ненулевая динамика оружия,акселерометры также измеряют линейные ускорения оружия как такового, в дополнение к составляющей ускорения силы тяжести. Чтобы устранить этот недостаток, в вышеописанном электронном устройстве 1 обеспечено использование низкочастотного фильтра таким образом, чтобы предпочтительно устранить в сигнале влияние какого-либо линейного ускорения оружия. В вышеупомянутом описании уместно отметить, что начальное пространственное положение ору-7 023656 жия при статическом условии не является очевидно доступным на основании просто интегрирования скоростей, измеренных гироскопами. Устройство 1 действительно позволяет предпочтительно использовать ускорение, измеренное акселерометрами, чтобы компенсировать исходную погрешность в скорости, измеренной гироскопом. Действительно, известно, что на сигнал скорости, обеспечиваемый электронным гироскопом, оказывает воздействие дрейф/шум/помехи, что вносит ошибку в измерении. Соответственно, вычисление пространственного положения посредством повторяемой операции интегрирования измеренной скорости подвержено влиянию последовательного и повторяемого интегрирования исходной помехи в сигнале скорости, что таким образом определяет ошибку в конечном пространственном положении. В соответствии с возможным вариантом осуществления, показанном на примере по фиг. 1, вышеописанное электронное устройство 1 может предпочтительно включать в себя закрытую коробчатую раму 50, внутри которой скомпонованы инерциальная платформа 6 и обрабатывающий блок 10, и соединительный механизм 51, приспособленный для того, чтобы позволить устойчиво, но легкосменно присоединить раму к оружию 2, в частности к гранатомету. Вышеописанное электронное устройство имеет преимущество обеспечения точного указания пространственного положения оружия, поскольку ошибка, вносимая гироскопами в измерении скорости,устраняется компенсацией, полученной посредством составляющих ускорения, обеспеченных акселерометрами. Кроме того, электронное устройство предпочтительно обеспечено электронной архитектурой, которая помимо того, что является простой и доступной, имеет вполне умеренный вес и объем. Наконец, очевидным является, что могут быть сделаны модификации и варианты электронного устройства и способа работы, не выходящие из объема настоящего изобретения, определяемого в соответствии с нижеследующей формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство (1) определения углов пространственного положения оружия, устанавливаемое на оружии, включающее в себя средство (7) измерения ускорения, конфигурированное, чтобы измерять составляющие (Ax, Ay, Az) ускорения оружия по осям (XBODY, YBODY, ZBODY) первой системы координат (BODY), связанной с оружием (1); средство (8) измерения угловой скорости, конфигурированное, чтобы измерять составляющие (Gx,Gy, Gz) угловой скорости оружия по осям (Gx, Gy, Gz) упомянутой системы координат (XBODY, YBODY,ZBODY), и обрабатывающее средство (10), сконфигурированное чтобы вычислять фактические углы (Prc, Rro, Hrd) пространственного положения оружия в динамических условиях на основании составляющих угловой скорости (Gx, Gy, Gz) оружия,определять статические углы (Psc, Rso, Hsd) пространственного положения оружия в статических условиях самого оружия на основании упомянутых составляющих (Ах, Ау, Az) ускорения оружия посредством фильтрации по нижней частоте упомянутых составляющих (Ах, Ау) ускорения оружия,корректировать упомянутые составляющие (Gx, Gy, Gz) угловой скорости оружия на основании упомянутых статических углов (Psc, Rso, Hsd) пространственного положения и упомянутых фактических углов (Prc, Rro, Hrd) пространственного положения,при этом устройство отличается тем, что оно дополнительно сконфигурировано, чтобы определять первый статический угол пространственного положения оружия, соответствующий статическому углу тангажа (Psc(ti оружия на основании первой составляющей Ax(ti) ускорения оружия по первой оси (XBODY) упомянутой системы координат (BODY) во время (ti) вычисления, причем упомянутая первая ось (XBODY) расположена коаксиально продольной оси CK ствола (3) упомянутого оружия (1),определять второй статический угол пространственного положения, соответствующий статическому углу крена (Rso(ti оружия на основании второй составляющей ускорения оружия по второй оси(YBODY) упомянутой системы координат (BODY) и упомянутому определенному упомянутому статическому тангажу (Psc(ti во время (ti) вычисления, причем упомянутая вторая ось (YBODY) ориентирована к правой стороне опорной рамы оружия (1),определять третий фактический угол пространственного положения, соответствующий фактическому углу курса H(ti) оружия, на основании упомянутых составляющих (Gx, Gy) угловой скорости оружия, фактических углов тангажа (Prc(ti-1 и крена (Rro(ti-1, как определено во время (ti-1) вычисления,предшествующее текущему времени (ti) вычисления. 2. Устройство по п.1, в котором упомянутое обрабатывающее средство (10) сконфигурировано,чтобы определять первый статический угол пространственного положения оружия, соответствующий статическому тангажу (Psc(ti, посредством осуществления следующего математического отношения: причем Ax(ti) является первой составляющей ускорения оружия по первой оси (XBODY) упомянутой системы координат (BODY) во время ti вычисления. 3. Устройство по любому из пп.1 или 2, в котором упомянутое обрабатывающее средство (10) сконфигурировано, чтобы определять второй статический угол пространственного положения, соответствующий статическому крену (Rso(ti, посредством осуществления следующего математического отношения: причем Ay(ti) является второй составляющей ускорения оружия по второй оси (YBODY) упомянутой системы координат (BODY). 4. Устройство по п.3, в котором упомянутое электронное обрабатывающее средство (10) сконфигурировано, чтобы получать во время (ti) вычисления фактические углы пространственного положения, включающие в себя тангаж (Prc(ti-1, крен (Rro(ti-1 и курс (Hrd(ti-1, определенные во время (ti-1) вычисления, предшествующее текущему времени (ti) вычисления,определять корректировочные коэффициенты упомянутых составляющих (Gx, Gy) угловой скорости, как функцию разности между упомянутым динамическим тангажем (Prc(ti-1, динамическим креном (Rro(ti-1, как определено во время (ti-1) вычисления, предшествующее текущему времени (ti), и упомянутым статическим тангажем (Psc(ti-1 и, соответственно, статическим креном Rso(ti), как определено в текущее время (ti) вычисления. 5. Устройство по п.4, в котором упомянутое электронное обрабатывающее средство (10) сконфигурировано, чтобы определять первый корректировочный коэффициент ( ), вычисляя разность между упомянутым фактическим углом тангажа (Prc(ti-1, вычисленным во время (ti-1), предшествующее текущему времени(ti) вычисления, и статическим углом тангажа (Psc(ti, вычисленным в текущее время (ti) вычисления,вычислять дифференциал тангажа (dP(ti посредством отношения вычислять скорректированный дифференциал тангажа (dPc(ti посредством вычитания упомянутого первого корректировочного коэффициента ( ) из упомянутого дифференциала тангажа dP(ti) и интегрировать упомянутый скорректированный дифференциал тангажа (dPc(ti по времени, чтобы определить фактический угол тангажа (Prc(ti. 6. Устройство по п.4, в котором упомянутое электронное обрабатывающее средство (10) сконфигурировано, чтобы определять второй корректировочный коэффициент ( ), вычисляя разность между упомянутым фактическим углом крена (Pro (ti-1, вычисленным во время (ti-1), предшествующее текущему времени (ti) вычисления, и упомянутым статическим углом крена (Pro(ti, вычисленным в текущее время (ti) вычисления,вычислять дифференциал крена (dR(ti посредством отношения вычислять скорректированный дифференциал крена (dRc(ti посредством вычитания упомянутого корректировочного коэффициента ( ) из упомянутого дифференциала крена dR(ti) и интегрировать упомянутый скорректированный дифференциал крена (dRc(ti по времени, чтобы определить фактический угол крена (Rro(ti. 7. Устройство по любому из предыдущих пунктов, в котором упомянутое обрабатывающее средство сконфигурировано, чтобы вычислять дифференциал курса (dH(ti посредством следующего математического отношения: интегрировать дифференциал курса (dH(ti по времени, чтобы определить фактический угол курса(H(ti. 8. Способ определения углов пространственного положения оружия с использованием устройства по п.1, включающий в себя измерение составляющих (Ах, Ау, Az) ускорения оружия (1) по осям (XBODY, YBODY, ZBODY) первой системы (BODY) координат, связанной с оружием (2); измерение составляющих (Gx, Gy, Gz) угловой скорости оружия по осям (XBODY, YBODY, ZBODY) упомянутой системы (BODY) координат и вычисление фактических углов (Prc, Rro, Hrd) пространственного положения оружия в динамических условиях на основании составляющих угловой скорости (Gx, Gy, Gz),определение статических углов (Psc, Rso, Hsd) пространственного положения оружия в статических условиях оружия на основании упомянутых составляющих (Ах, Ау, Az) ускорения посредством фильтра-9 023656 ции по нижней частоте упомянутых составляющих (Ах, Ау) ускорения,корректировку упомянутых составляющих (Gx, Gy, Gz) угловой скорости на основании упомянутых статических углов (Psc, Rso, Hsd) пространственного положения и упомянутых фактических углов (Prc,Rro, Hrd) пространственного положения,при этом способ отличается тем, что в нем определяют первый статический угол пространственного положения оружия, соответствующий статическому углу тангажа (Psc(ti оружия, на основании первой составляющей Ax(ti) ускорения оружия по первой оси (XBODY) упомянутой системы координат (BODY) во время (ti) вычисления, причем упомянутая первая ось (XBODY) расположена коаксиально продольной оси (CK) ствола (3) упомянутого оружия(1),определяют второй статический угол пространственного положения, соответствующий статическому углу крена (Rso(ti оружия, на основании второй составляющей ускорения оружия по второй оси(YBODY) упомянутой системы координат (BODY) и упомянутому определенному упомянутому статическому тангажу (Psc(ti во время (ti) вычисления, причем упомянутая вторая ось (YBODY) ориентирована к правой стороне опорной рамы оружия (1),определяют третий фактический угол пространственного положения, соответствующий фактическому углу курса H(ti) оружия, на основании упомянутых составляющих (Gx, Gy) угловой скорости оружия, фактических углов тангажа (Prc(ti-1 и крена (Rro(ti-1, как определено во время (ti-1) вычисления,предшествующее текущему времени (ti) вычисления. 9. Способ по п.8, включающий в себя этап определения первого статического угла пространственного положения оружия, соответствующего статическому тангажу (Psc(ti, посредством осуществления следующего математического отношения: причем Ax(ti) является первой составляющей ускорения оружия по первой оси (XBODY) упомянутой системы координат (BODY) во время (ti) вычисления. 10. Способ по любому из пп.8 или 9, включающий в себя этап определения второго статического угла пространственного положения, соответствующего статическому крену (Rso(ti, посредством осуществления следующего математического отношения: причем Ay(ti) является второй составляющей ускорения оружия (1) по второй оси (YBODY) упомянутой системы координат (BODY). 11. Способ по п.10, включающий в себя этап получения во время (ti) вычисления фактических углов пространственного положения, включающих в себя тангаж (Prc(ti-1, крен (Rro(ti-1 и курс (Hrd(ti-1, определенных во время (ti-1) вычисления,предшествующее текущему времени (ti) вычисления,определения корректировочных коэффициентов упомянутых составляющих (Gx, Gy) угловой скорости, как функции разности между упомянутым динамическим тангажем (Prc(ti-1, динамическим креном (Rro(ti-1, как определено во время (ti-1) вычисления, предшествующее текущему времени(ti), и упомянутым статическим тангажем (Psc(ti-1 и, соответственно, статическим креном Rso(ti1), как определено в текущее время (ti) вычисления. 12. Способ по п.11, включающий в себя этап определения первого корректировочного коэффициента ( ) посредством вычисления разности между упомянутым фактическим углом тангажа (Prc(ti-1, вычисленным во время (ti-1), предшествующее текущему времени (ti) вычисления, и статическим углом тангажа (Psc(ti, вычисленным в текущее время(ti) вычисления,вычисления дифференциала тангажа (dP(ti посредством отношения вычисления скорректированного дифференциала тангажа (dPc(ti посредством вычитания упомянутого первого корректировочного коэффициента ( ) из упомянутого дифференциала тангажа dP(ti) и интегрирования упомянутого скорректированного дифференциала тангажа (dPc(ti по времени, так чтобы определить фактический угол тангажа (Prc(ti. 13. Способ по п.12, включающий в себя этапы определения второго корректировочного коэффициента ( ) посредством вычисления разности между упомянутым фактическим углом крена (Pro(ti-1, вычисленным во время (ti-1), предшествующее текущему времени (ti) вычисления, и упомянутым статическим углом крена (Pro(ti, вычисленным в текущее время (ti) вычисления,вычисления дифференциала крена (dR(ti посредством отношения вычисления скорректированного дифференциала крена (dRc(ti посредством вычитания упомянутого корректировочного коэффициента ( ) из упомянутого дифференциала крена dR(ti) и интегрирования упомянутого скорректированного дифференциала крена (dRc(ti по времени, чтобы определить фактический угол крена (Rro(ti. 14. Способ по любому из пп.8-13, включающий в себя этапы вычисления дифференциала курса (dH(ti посредством следующего математического отношения: интегрирования дифференциала курса (dH(ti по времени, чтобы определить фактический угол курса (H(ti.
МПК / Метки
МПК: F41G 3/14, F41G 1/44, G01C 21/16, F41G 1/48
Метки: работы, положения, определения, электронное, оружия, способ, пространственного, устройство
Код ссылки
<a href="https://eas.patents.su/15-23656-elektronnoe-ustrojjstvo-dlya-opredeleniya-prostranstvennogo-polozheniya-oruzhiya-i-sposob-ego-raboty.html" rel="bookmark" title="База патентов Евразийского Союза">Электронное устройство для определения пространственного положения оружия и способ его работы</a>
Устройство и способ определения положения кабины лифта
Номер патента: 22381
Опубликовано: 30.12.2015
Авторы: Лоукас Томми, Мери Тимо, Кангас Петтери
МПК: B66B 3/02
Метки: положения, способ, лифта, устройство, определения, кабины
Формула / Реферат:
1. Устройство для определения положения кабины (1) лифта относительно уровня этажа в шахте (2) лифта, отличающееся тем, что содержитизмерительное устройство (3), прикрепленное к кабине (1) лифта и выполненное с возможностью формирования электромагнитного радиочастотного измерительного сигнала (5);идентификатор (4) положения, установленный относительно шахты (2) лифта в районе указанного уровня этажа и содержащий два блока (9, 9') RFID, причем...
Способ определения пространственного распределения свойств геологической среды
Номер патента: 18423
Опубликовано: 30.07.2013
Авторы: Стрэк Курт М., Ройтер Хорст, Томсен Леон А.
МПК: G06F 19/10
Метки: геологической, пространственного, свойств, распределения, среды, способ, определения
Формула / Реферат:
1. Способ определения пространственного распределения свойств геологической среды, включающий генерацию исходных моделей геологической среды по одной модели для каждого из типов данных: сейсмических данных и данных, полученных при электромагнитной разведке с использованием переходных процессов с управляемым источником (ЭМРпп), которые по каждому типу собирают, по существу, в одной и той же исследуемой области геологической среды, оптимизацию...
Способ определения заданного относительного положения пациента в стоматологическом панорамном рентгеновском аппарате и заданной траектории перемещения этого аппарата относительно пациента, а также соответствующее устройство
Номер патента: 10698
Опубликовано: 30.10.2008
Автор: Томс Михаэль
МПК: A61B 6/14
Метки: положения, этого, также, относительно, пациента, аппарате, способ, перемещения, панорамном, относительного, определения, заданной, траектории, аппарата, рентгеновском, стоматологическом, устройство, заданного, соответствующее
Формула / Реферат:
1. Способ определения заданного относительного положения пациента в стоматологическом панорамном рентгеновском аппарате, при осуществлении которого: а) определяют кривизну передней части 72, 74 зубной дуги 68, 70 пациента и б) на основе полученной кривизны передней части зубной дуги и на основе изогнутой плоскости 88 проекции панорамного рентгеновского аппарата 10 вычисляют заданные координаты положения челюсти 24, 26 пациента, отличающийся тем,...
Способ определения времени работы двигателя внутреннего сгорания и устройство для его осуществления

Номер патента: 12556
Опубликовано: 30.10.2009
Автор: Каплунский Александр Романович
МПК: G01M 15/05, G07C 5/00, G07C 5/10...
Метки: способ, работы, определения, сгорания, осуществления, времени, внутреннего, двигателя, устройство
Формула / Реферат:
1. Способ определения времени работы ДВС, заключающийся в регистрации параметров работы отдельного агрегата или системы двигателя и последующего определения из зарегистрированного значения параметра времени работы двигателя, отличающийся тем, что регистрируют время работы датчика расхода топлива, при этом используют более одного счетчика времени на различных режимах в зависимости от скорости расхода топлива, причем при изменении скорости расхода...
Устройство для определения взаимного положения двух по существу плоских элементов
Номер патента: 11464
Опубликовано: 28.04.2009
Авторы: Куртц Райнер, Каннон Марк, Хюбш Вольфрам, Грумм Харальд
Метки: существу, определения, взаимного, устройство, плоских, двух, элементов, положения
Формула / Реферат:
1. Устройство для определения взаимного положения в плоскости Х-Y двух, по существу, плоских элементов, расположенных, по существу, один над другим на расстоянии друг от друга в направлении Z, содержащее по меньшей мере один расположенный между указанными элементами оптический регистрирующий прибор, позволяющий регистрировать по меньшей мере по две точки на обращенных друг к другу поверхностях элементов, и блок обработки, выполненный с...
Предыдущий патент: Передвижная разливочная установка для бутылок в контейнере
Следующий патент: Искусственная приманка для любительской ловли рыбы (варианты)
Случайный патент: Усовершенствованная электродвижущая машина, использующая магнитную сборку халбаха и электроны, захваченные в электромагнитным образом обеспеченном токе