Устройство и способ определения положения кабины лифта
Формула / Реферат
1. Устройство для определения положения кабины (1) лифта относительно уровня этажа в шахте (2) лифта, отличающееся тем, что содержит
измерительное устройство (3), прикрепленное к кабине (1) лифта и выполненное с возможностью формирования электромагнитного радиочастотного измерительного сигнала (5);
идентификатор (4) положения, установленный относительно шахты (2) лифта в районе указанного уровня этажа и содержащий два блока (9, 9') RFID, причем каждый блок (9, 9') RFID выполнен с возможностью индуктивного подключения к упомянутому электромагнитному измерительному сигналу (5), а также с возможностью отправки, после подключения, идентификационной информации измерительному устройству (3), при этом идентификатор (4) положения установлен так, что один из блоков RFID расположен выше, а другой - ниже указанного уровня этажа на таком заранее заданном расстоянии друг от друга, что зоны, определяемые блоками (9, 9') RFID, частично перекрываются на указанном уровне этажа, а измерительное устройство (3) выполнено с возможностью определения положения кабины (1) лифта как соответствующего указанному уровню этажа в месте, где измерительное устройство регистрирует идентификационную информацию как от верхнего (9), так и от нижнего (9') блоков RFID.
2. Устройство по п.1, отличающееся тем, что в измерительном устройстве (3) размещены средства (11) для измерения внешнего магнитного поля, а идентификатор (4) положения содержит постоянно намагниченный маркерный участок (12), включающий по меньшей мере две последовательные магнитные области (13, 13'), магнитные полюса которых направлены в противоположных направлениях, причем указанные последовательные магнитные области расположены на заданном расстоянии друг от друга в направлении перемещения кабины лифта.
3. Устройство по п.2, отличающееся тем, что в измерительном устройстве (3) размещены средства (11) для измерения внешнего магнитного поля, а идентификатор (4) положения содержит постоянно намагниченный маркерный участок (12), включающий четыре магнитные области (13, 13'), установленные последовательно, причем магнитные полюса двух областей из последовательных магнитных областей всегда направлены в противоположных направлениях, при этом указанные последовательные магнитные области размещены на заданном расстоянии друг от друга в направлении перемещения кабины лифта.
4. Способ определения положения кабины (1) лифта относительно уровня этажа в шахте (2) лифта с использованием устройства по п.1, включающий
формирование электромагнитного радиочастотного измерительного сигнала (5) посредством измерительного устройства (3), прикрепленного к кабине (1) лифта;
отправку измерительному устройству (3) каждым блоком (9, 9') RFID, после индуктивного подключения к упомянутому электромагнитному измерительному сигналу (5), идентификационной информации и
определение измерительным устройством (3) положения кабины (1) лифта как соответствующего указанному уровню этажа в месте, где измерительное устройство регистрирует идентификационную информацию как от верхнего (9), так и от нижнего (9') блоков RFID.
5. Способ по п.4, отличающийся тем, что
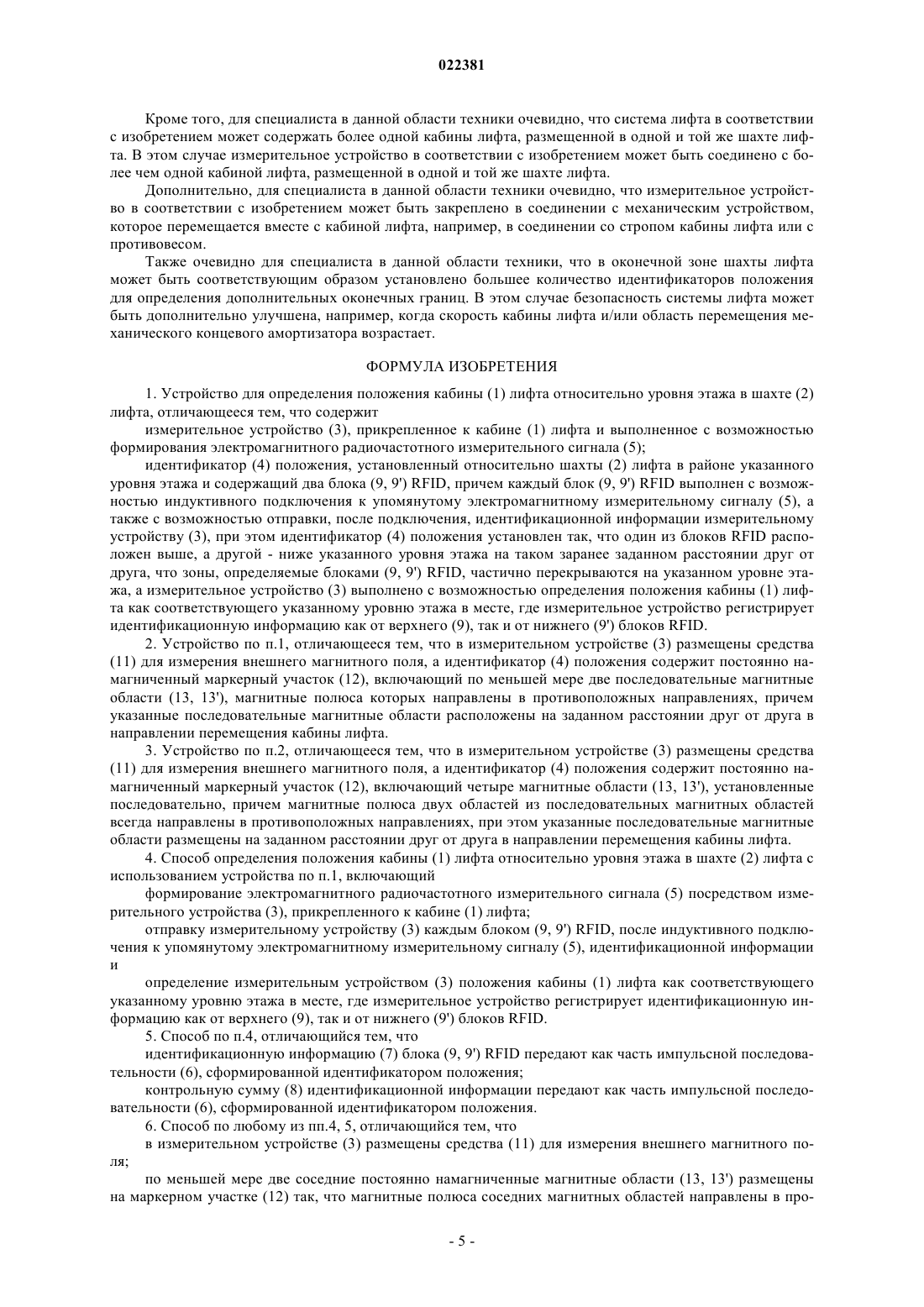
идентификационную информацию (7) блока (9, 9') RFID передают как часть импульсной последовательности (6), сформированной идентификатором положения;
контрольную сумму (8) идентификационной информации передают как часть импульсной последовательности (6), сформированной идентификатором положения.
6. Способ по любому из пп.4, 5, отличающийся тем, что
в измерительном устройстве (3) размещены средства (11) для измерения внешнего магнитного поля;
по меньшей мере две соседние постоянно намагниченные магнитные области (13, 13') размещены на маркерном участке (12) так, что магнитные полюса соседних магнитных областей направлены в противоположных направлениях;
постоянно намагниченный маркерный участок (12) размещен в идентификаторе (4) положения так, чтобы упомянутые соседние магнитные области (13, 13') следовали через установленное расстояние друг от друга в направлении перемещения кабины лифта.
7. Идентификатор (4) положения для определения положения перемещающегося объекта, содержащий
два блока (9, 9') RFID, расположенных друг от друга на таком заранее заданном расстоянии в направлении перемещения объекта, что зоны, определяемые блоками (9, 9') RFID, частично перекрываются; и
крепежное приспособление для фиксации идентификатора положения относительно пути (2) перемещения объекта,
при этом идентификатор (4) положения выполнен с возможностью фиксации для ориентирования антенн блоков (9, 9') RFID так, чтобы антенны индуктивно подключались к радиочастотному измерительному сигналу (5), сформированному в направлении, по существу, перпендикулярном направлению перемещения объекта.

Текст
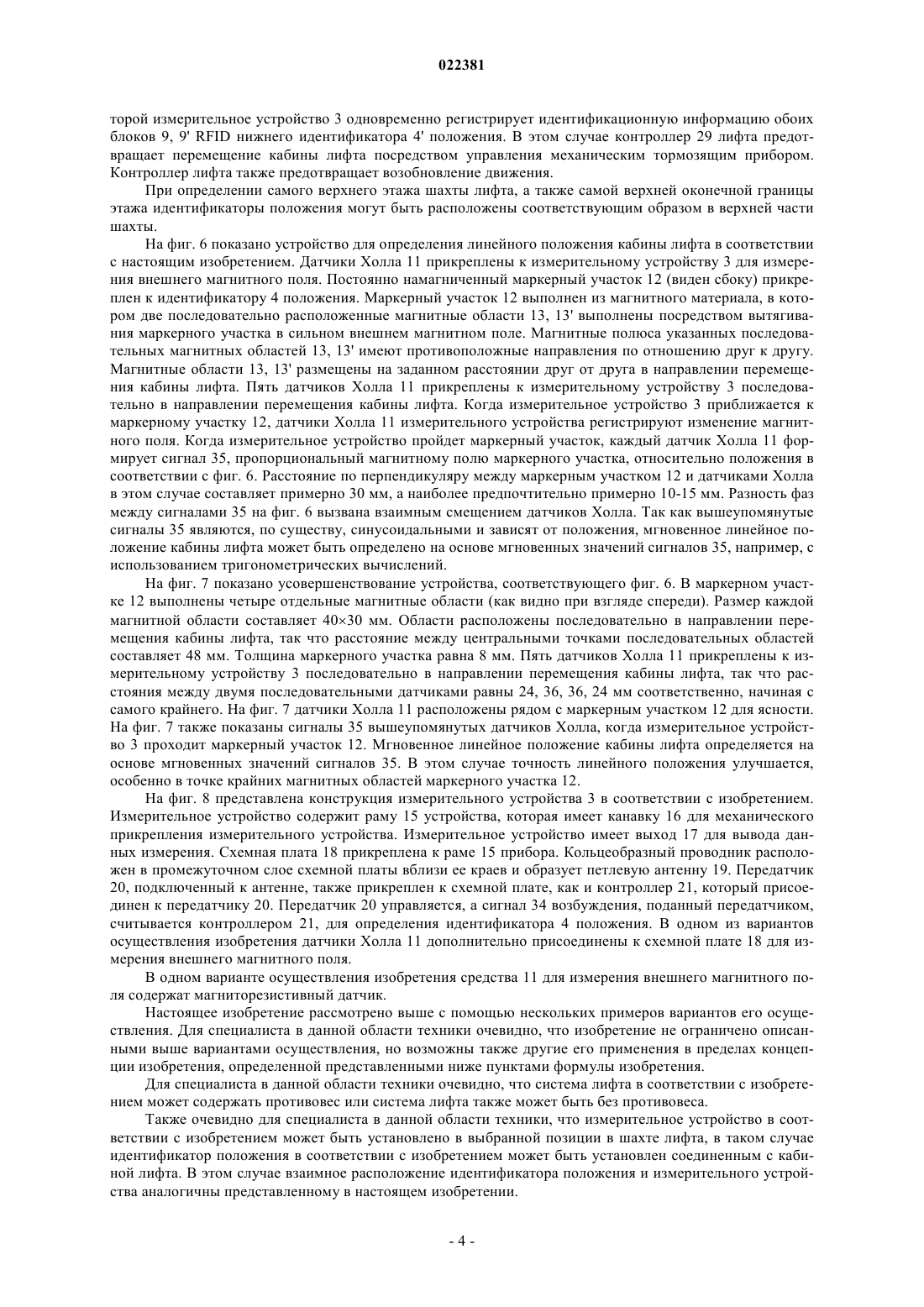
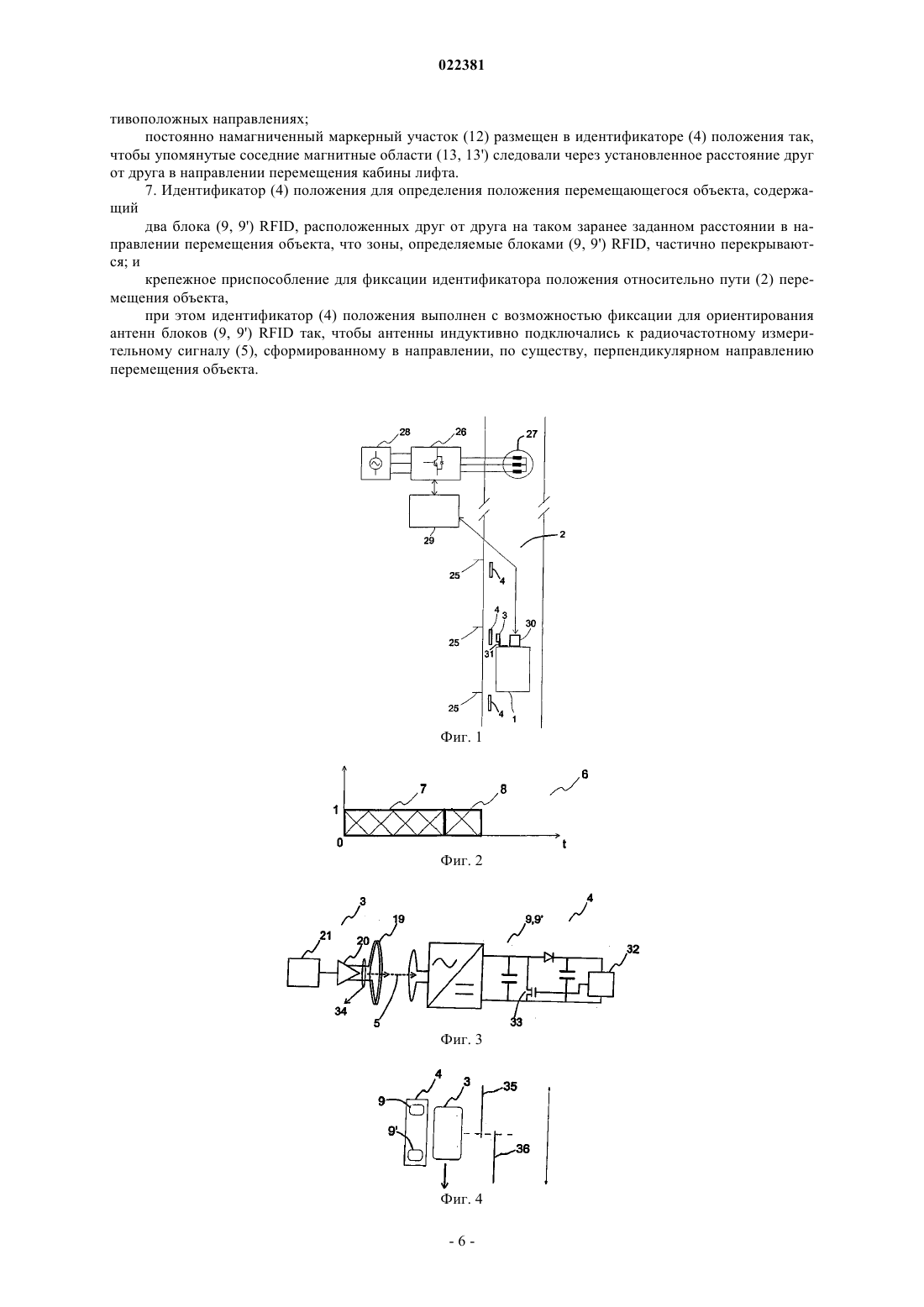
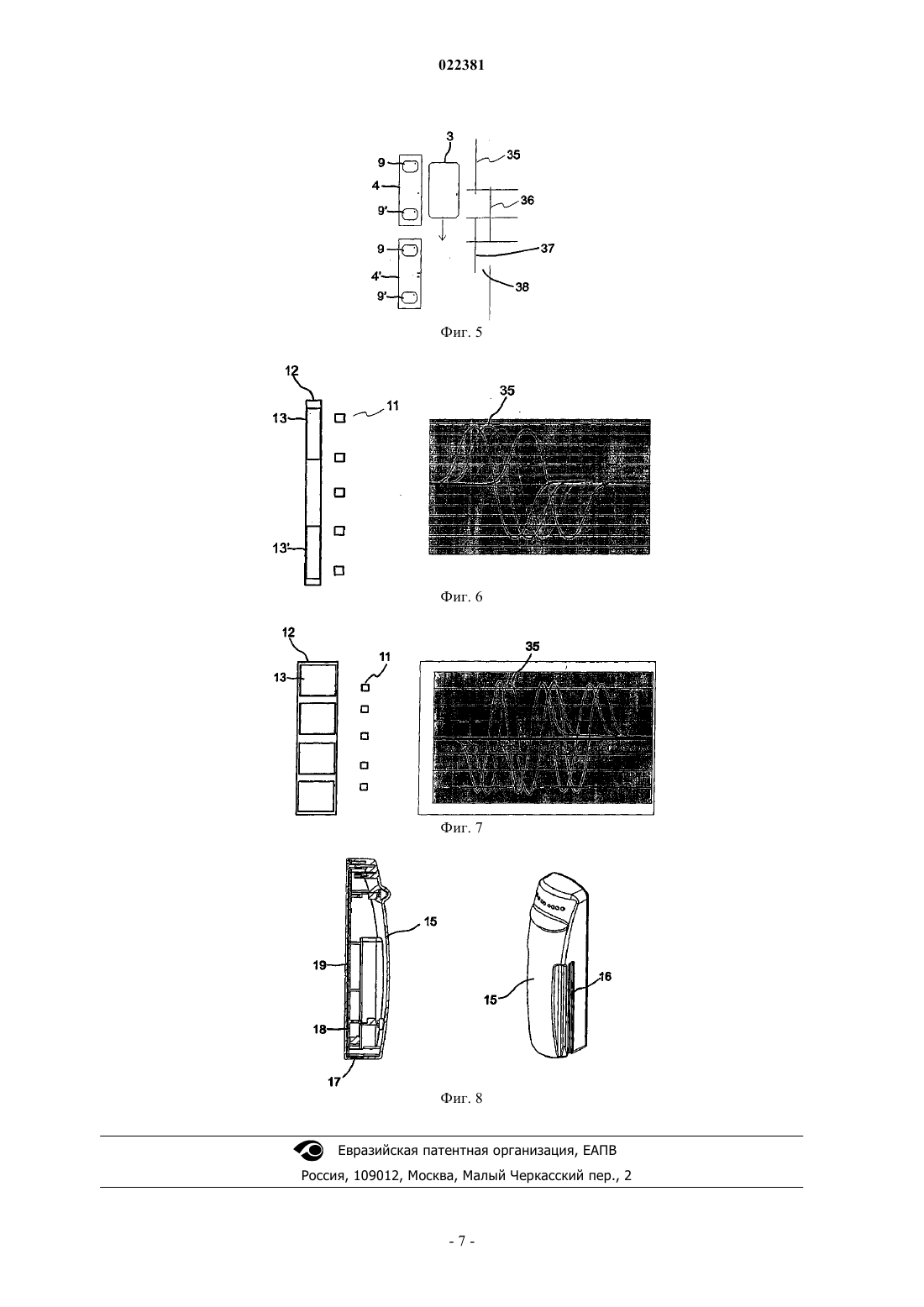
УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАБИНЫ ЛИФТА Изобретение относится к устройству и способу определения положения кабины (1) лифта в шахте (2) лифта. Устройство содержит измерительное устройство (3), соединенное с кабиной (1) лифта. Измерительное устройство выполнено с возможностью формирования электромагнитного радиочастотного измерительного сигнала (5) для определения положения кабины лифта. Устройство также содержит идентификатор (4) положения, установленный в выбранной позиции в шахте (2) лифта. Идентификатор положения выполнен с возможностью индуктивного подключения к электромагнитному измерительному сигналу (5), а также отправки, после подключения,заданной импульсной последовательности с использованием упомянутого электромагнитного измерительного сигнала (5). Изобретение относится к устройству и способу определения положения кабины лифта. Положение кабины лифта в шахте лифта обычно определяют с помощью магнитного переключателя, прикрепленного к кабине лифта. В этом случае постоянные магниты располагают в системе лифта на уровне пола, а также в оконечной зоне шахты лифта, наряду с другими местами. В соответствии с основным принципом определения положения механический контакт магнитного переключателя, прикрепленного к кабине лифта, изменяет свое состояние, когда магнитный переключатель оказывается вблизи от постоянного магнита, расположенного в шахте лифта. Механический контакт магнитного переключателя не отражает точное положение кабины лифта. По этой причине кабина лифта после потери информации о положении должна подойти к известной опорной точке в шахте лифта. Такой тип поиска положения кабины лифта должен быть выполнен, например, после перерыва в подаче электроэнергии. Механические контакты магнитных переключателей не надежны; вибрация или удар могут вызвать отказ в работе контакта, механические контакты также легко окисляются. Цель настоящего изобретения состоит в том, чтобы разрешить вышеупомянутые проблемы, а также проблемы, раскрытые в приведенном ниже описании изобретения. Таким образом, настоящее изобретение обеспечивает определение положения кабины лифта, которое является более надежным и простым,чем известные из уровня техники аналоги. Устройство для определения положения кабины лифта в шахте лифта согласно настоящему изобретению отличается признаками, раскрытыми в отличительной части п.1 формулы изобретения. Способ определения положения кабины лифта в шахте лифта согласно настоящему изобретению отличается признаками, раскрытыми в отличительной части п.6 формулы изобретения. Измерительное устройство для определения положения перемещающегося объекта согласно настоящему изобретению отличается признаками, раскрытыми в отличительной части п.10 формулы изобретения. Идентификатор положения для определения положения перемещающегося объекта согласно настоящему изобретению отличается признаками, раскрытыми в отличительной части п.11 формулы изобретения. Другие варианты осуществления изобретения отличаются признаками, раскрытыми в других пунктах формулы изобретения. Некоторые варианты осуществления изобретения также рассмотрены в описательной части настоящего изобретения. Изобретательское содержание описания также может быть определено иначе, чем в представленных ниже пунктах формулы изобретения. Изобретательское содержание может также состоять из нескольких отдельных изобретений, в особенности если изобретение рассмотрено в свете выражений или не выраженных явно подзадач или с точки зрения преимуществ или категорий достигаемых преимуществ. В этом случае некоторые из признаков, содержащихся в приведенных ниже пунктах формулы изобретения, могут быть избыточными с точки зрения отдельных идей изобретения. В соответствии с изобретением устройство для определения положения кабины лифта в шахте лифта содержит измерительное устройство, соединенное с кабиной лифта и выполненное с возможностью формирования электромагнитного радиочастотного измерительного сигнала, для определения положения кабины лифта, а также идентификатор положения, установленный в выбранной позиции в шахте лифта и выполненный с возможностью индуктивного подключения к упомянутому электромагнитному измерительному сигналу, а также с возможностью отправки, после подключения, заданной импульсной последовательности измерительному устройству посредством упомянутого измерительного сигнала. В способе определения положения кабины лифта в шахте лифта в соответствии с изобретением измерительное устройство, которое перемещается вместе с кабиной лифта, соединяют с кабиной лифта; при этом измерительное устройство выполнено с возможностью формирования электромагнитного радиочастотного измерительного сигнала для определения положения кабины лифта; идентификатор положения устанавливают в выбранной позиции в шахте лифта; указанный идентификатор положения выполнен с возможностью индуктивного подключения к упомянутому электромагнитному измерительному сигналу, а также с возможностью отправки после подключения заданной импульсной последовательности измерительному устройству посредством упомянутого измерительного сигнала. В соответствии с изобретением измерительное устройство для определения положения перемещающегося объекта содержит раму устройства, содержащую механическое крепежное приспособление для прикрепления к перемещающемуся объекту; выход для вывода информации о положении перемещающегося объекта; схемную плату, прикрепленную к раме устройства, причем на схемной плате помещены: петлевая антенна, сформированная на схемной плате; передатчик, соединенный с антенной; а также контроллер, соединенный с передатчиком. Схемная плата приспособлена для соединения с перемещающимся объектом посредством рамы устройства, так что поверхность схемной платы расположена,по существу, в направлении перемещения, а петлевая антенна схемной платы выполнена с возможностью формирования электромагнитного радиочастотного измерительного сигнала в направлении, по существу, перпендикулярном направлению перемещения объекта, для определения положения перемещающегося объекта. В соответствии с изобретением идентификатор положения для определения положения перемещающегося объекта содержит блок RFID (RFID - радиочастотная идентификация), а также крепежное приспособление для фиксации идентификатора положения относительно пути перемещения объекта. Идентификатор положения выполнен с возможностью фиксации для ориентирования антенны блокаRFID так, чтобы антенна индуктивно подключалась к радиочастотному измерительному сигналу, сформированному в направлении, по существу, перпендикулярном направлению перемещения объекта. Среди прочего, в изобретении достигается по меньшей мере одно из перечисленных ниже преимуществ. Так как идентификатор положения является пассивным, то для него не требуется отдельный источник питания. В этом случае идентификатор положения легко встроить в устройство в соответствии с настоящим изобретением. Идентификатор положения приспособлен для определения точного положения кабины лифта. В этом случае, например, после перерыва в подаче электроэнергии информация о положении кабины лифта может быть получена путем перемещения кабины лифта до соединения с ближайшим идентификатором положения, в указанном случае нет необходимости в выполнении поиска положения кабины лифта в соответствии с уровнем техники. Посредством использования контрольной суммы идентификатора положения может быть улучшена надежность определения идентификационной информации идентификатора положения. Если идентификатор положения содержит по меньшей мере два блока RFID, их идентификационная информация может быть сравнена друг с другом, в этом случае может контролироваться состояние идентификатора положения. Информация о положении кабины лифта может быть определена линейно посредством измерения магнитного поля, создаваемого постоянно намагниченным маркерным участком. В этом случае информация о положении также может быть определена с использованием двух каналов, от блока RFID и от постоянно намагниченного маркерного участка, с помощью измерительного устройства, выполненного в соответствии с настоящим изобретением. Краткое описание чертежей Далее изобретение будет рассмотрено более подробно с помощью нескольких примеров вариантов осуществления со ссылками на прилагаемые чертежи, на которых представлено: на фиг. 1 - система лифта, в которой применено устройство в соответствии с настоящим изобретением; на фиг. 2 - структура импульсной последовательности в соответствии с настоящим изобретением; на фиг. 3 - индуктивное соединение измерительного устройства и идентификатора положения; на фиг. 4 - устройство для определения уровня этажа для лифта в соответствии с настоящим изобретением; на фиг. 5 - устройство для определения оконечного этажа, а также оконечных границ шахты лифта в соответствии с настоящим изобретением; на фиг. 6 - одно устройство для определения линейного положения кабины лифта в соответствии с настоящим изобретением; на фиг. 7 - второе устройство для определения линейного положения кабины лифта в соответствии с настоящим изобретением; на фиг. 8 - конструкция измерительного устройства в соответствии с настоящим изобретением. Варианты осуществления изобретения На фиг. 1 представлена система лифта, в которой кабина 1 лифта перемещается в шахте лифта 2 таким образом, который, по существу, соответствует известному уровню техники. Двигатель 27 лифта перемещает кабину 1 лифта в шахте 2 лифта, по существу, в вертикальном направлении между уровнями 25 этажей с помощью тросов лифта (не показаны). Преобразователь 26 частоты регулирует перемещение двигателя 27 лифта путем регулирования подаваемой мощности между электрической сетью 28 и двигателем лифта. Регулировку перемещения кабины лифта, а также регулировку движения лифта осуществляет контроллер 29 лифта в ответ на вызовы, посылаемые от уровней 25 этажей, а также в ответ на вызовы из кабины, посланные из кабины лифта и переданные контроллером 30 кабины лифта. Одно устройство для определения положения кабины 1 лифта в шахте 2 лифта в соответствии с настоящим изобретением устанавливается в систему лифта согласно фиг. 1. Измерительное устройство 3 установлено в соединении с крышей кабины 1 лифта с помощью крепежного приспособления 31. Измерительное устройство 3 содержит петлевую антенну, которая ориентирована так, что направление электромагнитного радиочастотного сигнала 5 антенны, по существу, составляет прямой угол с направлением перемещения кабины лифта. Идентификаторы 4 положения расположены в выбранных позициях в шахте 2 лифта. Идентификаторы 4 положения, например, прикреплены магнитными фиксаторами к направляющему рельсу (не показан) кабины лифта в соответствии с уровнями 25 этажей. В ситуации, изображенной на фиг. 1, пол кабины 1 лифта расположен на уровне 25 этажа, в этом случае измерительное устройство 3 и идентификатор 4 положения, соответствующий уровню этажа, расположены друг напротив друга, как показано на этом чертеже. В таком случае, когда идентификатор 4 положения уровня этажа расположен в непосредственной близости от электромагнитного измерительного сигнала 5, сформированного измерительным устройством 3, идентификатор 4 положения индуктивно подключается к упомянутому электромагнитному измерительному сигналу 5. После подключения идентификатор положе-2 022381 ния посылает заданную импульсную последовательность 6 измерительному устройству 3 посредством вышеупомянутого измерительного сигнала 5. Измерительное устройство 3, основываясь на импульсной последовательности 6, идентифицирует рассматриваемый идентификатор 4 положения. Определенное таким образом положение передают от измерительного устройства 3 сначала в контроллер 30 кабины лифта, а затем от контроллера кабины лифта в контроллер 29 лифта по подвижному кабелю, или, например, по радиоканалу передачи данных. На фиг. 3 показан механизм соединения между измерительным устройством 3 и идентификатором 4 положения. На фиг. 2 показана импульсная последовательность 6,формируемая идентификатором положения. На фиг. 3 измерительное устройство 3 расположено в непосредственной близости от идентификатора 4 положения. Высокочастотный сигнал 34 возбуждения подается передатчиком 20 на петлевую антенну 19 измерительного устройства 3. Петлевая антенна формирует электромагнитный радиочастотный измерительный сигнал 5 как отклик на сигнал возбуждения. Когда антенна идентификатора 4 положения расположена на расстоянии от петлевой антенны измерительного устройства 3, по существу, меньшем,чем длина волны измерительного сигнала 5, антенна идентификатора 4 положения индуктивно подключается к упомянутому измерительному сигналу 5. В одном варианте осуществления настоящего изобретения частота электромагнитного измерительного сигнала 5 составляет 13,56 МГц. Расстояние между петлевой антенной 19 измерительного устройства и антенной идентификатора 4 положения в этом случае составляет самое большее примерно 30 мм. Идентификатор 4 положения содержит микросхему 32, которая принимает электроэнергию для своей работы от измерительного сигнала 5 во время этого индуктивного подключения. В этом случае измерительный сигнал 5 формирует сигнал отклика в антенне идентификатора положения, при этом указанный сигнал отклика преобразуется выпрямительным мостом в электричество, обеспечивающее работу микросхемы 32. Микросхема изменяет нагрузку для сигнала 34 возбуждения посредством индуктивно подключенного измерительного сигнала 5. Изменение нагрузки осуществляется с помощью управления транзистором 33. Микроконтроллер 21 измерительного устройства обнаруживает изменение нагрузки как изменение сигнала 34 возбуждения. Микросхема 32 изменяет нагрузку сигнала 34 возбуждения управляемым путем, формируя импульсную последовательность 6, считываемую из сигнала 34 возбуждения измерительного устройства 3. На фиг. 2 показана структура одной импульсной последовательности 6 в соответствии с настоящим изобретением. Импульсная последовательность 6 передается в последовательном режиме и содержит индивидуальную идентификационную информацию 7 для идентификатора положения, для определения идентификатора положения, а также непосредственно следующую за ней контрольную сумму 8 идентификационной информации. Когда идентификатор 4 положения, который индивидуализирован с помощью идентификационной информации, установлен в выбранной позиции в шахте 1 лифта, может быть также определено точное положение в шахте лифта, соответствующее указанному идентификатору. На фиг. 4 представлено устройство для определения положения уровня этажа в системе лифта в соответствии с настоящим изобретением. В ситуации, показанной на чертеже, измерительное устройство 3 соединено с кабиной лифта, перемещающейся в направлении, указанном стрелкой, мимо идентификатора 4 положения, установленного в шахте лифта. Когда петлевая антенна 19 измерительного устройства 3 при движении сверху достигает непосредственной близости идентификатора 4 положения, верхний блок 9 из двух блоков RFID идентификатора положения индуктивно подключается к электромагнитному измерительному сигналу 5, сформированному петлевой антенной 19 измерительного устройства. Измерительное устройство 3 распознает идентификатор положения с помощью идентификации блоком RFID. В этом случае измерительное устройство 3 регистрирует, что кабина лифта достигла зоны 35 известного этажа. Когда измерительное устройство 3 перемещается дальше вниз в направлении стрелки, измерительное устройство достигает зоны 36 этажа, в соответствии с идентификационной информацией нижнего блока 9' RFID. Расстояние в направлении перемещения кабины лифта между блоками 9, 9' RFID установлено таким, что зоны 35, 36 этажей, определяемые блоками 9, 9' RFID, частично перекрывают друг друга. Уровень этажа лифта установлен в месте, в котором измерительное устройство 3 одновременно регистрирует идентификационную информацию обоих - верхнего 9 и нижнего 9' - блоков RFID. На фиг. 5 показано соответствующее устройство для определения самого нижнего этажа, а также оконечной границы шахты лифта. Когда измерительное устройство 3 приближается в направлении стрелки к идентификатору 4 положения, соответствующему самому нижнему этажу, положение этажа регистрируется в соответствии с вариантом осуществления, показанным на фиг. 4. Второй идентификатор 4' положения такого же типа установлен ниже идентификатора 4 положения. Расстояние в направлении перемещения кабины лифта между идентификаторами 4, 4' положения установлено таким, чтобы зоны 36, 37, определенные нижним блоком 9' RFID верхнего идентификатора 4 положения и верхним блоком 9 RFID нижнего идентификатора 4' положения, частично перекрывали друг друга. Перекрытие между этими зонами 36, 37 образует зависящую от направления оконечную границу. При приближении к зависящей от направления оконечной границе кабина лифта должна изменить свое направление на направление вверх, чтобы покинуть оконечную зону. Если, однако, кабина лифта продолжит дальше свое перемещение вниз, то будет достигнута последняя граница. Последняя граница задается в зоне 38, в ко-3 022381 торой измерительное устройство 3 одновременно регистрирует идентификационную информацию обоих блоков 9, 9' RFID нижнего идентификатора 4' положения. В этом случае контроллер 29 лифта предотвращает перемещение кабины лифта посредством управления механическим тормозящим прибором. Контроллер лифта также предотвращает возобновление движения. При определении самого верхнего этажа шахты лифта, а также самой верхней оконечной границы этажа идентификаторы положения могут быть расположены соответствующим образом в верхней части шахты. На фиг. 6 показано устройство для определения линейного положения кабины лифта в соответствии с настоящим изобретением. Датчики Холла 11 прикреплены к измерительному устройству 3 для измерения внешнего магнитного поля. Постоянно намагниченный маркерный участок 12 (виден сбоку) прикреплен к идентификатору 4 положения. Маркерный участок 12 выполнен из магнитного материала, в котором две последовательно расположенные магнитные области 13, 13' выполнены посредством вытягивания маркерного участка в сильном внешнем магнитном поле. Магнитные полюса указанных последовательных магнитных областей 13, 13' имеют противоположные направления по отношению друг к другу. Магнитные области 13, 13' размещены на заданном расстоянии друг от друга в направлении перемещения кабины лифта. Пять датчиков Холла 11 прикреплены к измерительному устройству 3 последовательно в направлении перемещения кабины лифта. Когда измерительное устройство 3 приближается к маркерному участку 12, датчики Холла 11 измерительного устройства регистрируют изменение магнитного поля. Когда измерительное устройство пройдет маркерный участок, каждый датчик Холла 11 формирует сигнал 35, пропорциональный магнитному полю маркерного участка, относительно положения в соответствии с фиг. 6. Расстояние по перпендикуляру между маркерным участком 12 и датчиками Холла в этом случае составляет примерно 30 мм, а наиболее предпочтительно примерно 10-15 мм. Разность фаз между сигналами 35 на фиг. 6 вызвана взаимным смещением датчиков Холла. Так как вышеупомянутые сигналы 35 являются, по существу, синусоидальными и зависят от положения, мгновенное линейное положение кабины лифта может быть определено на основе мгновенных значений сигналов 35, например, с использованием тригонометрических вычислений. На фиг. 7 показано усовершенствование устройства, соответствующего фиг. 6. В маркерном участке 12 выполнены четыре отдельные магнитные области (как видно при взгляде спереди). Размер каждой магнитной области составляет 4030 мм. Области расположены последовательно в направлении перемещения кабины лифта, так что расстояние между центральными точками последовательных областей составляет 48 мм. Толщина маркерного участка равна 8 мм. Пять датчиков Холла 11 прикреплены к измерительному устройству 3 последовательно в направлении перемещения кабины лифта, так что расстояния между двумя последовательными датчиками равны 24, 36, 36, 24 мм соответственно, начиная с самого крайнего. На фиг. 7 датчики Холла 11 расположены рядом с маркерным участком 12 для ясности. На фиг. 7 также показаны сигналы 35 вышеупомянутых датчиков Холла, когда измерительное устройство 3 проходит маркерный участок 12. Мгновенное линейное положение кабины лифта определяется на основе мгновенных значений сигналов 35. В этом случае точность линейного положения улучшается,особенно в точке крайних магнитных областей маркерного участка 12. На фиг. 8 представлена конструкция измерительного устройства 3 в соответствии с изобретением. Измерительное устройство содержит раму 15 устройства, которая имеет канавку 16 для механического прикрепления измерительного устройства. Измерительное устройство имеет выход 17 для вывода данных измерения. Схемная плата 18 прикреплена к раме 15 прибора. Кольцеобразный проводник расположен в промежуточном слое схемной платы вблизи ее краев и образует петлевую антенну 19. Передатчик 20, подключенный к антенне, также прикреплен к схемной плате, как и контроллер 21, который присоединен к передатчику 20. Передатчик 20 управляется, а сигнал 34 возбуждения, поданный передатчиком,считывается контроллером 21, для определения идентификатора 4 положения. В одном из вариантов осуществления изобретения датчики Холла 11 дополнительно присоединены к схемной плате 18 для измерения внешнего магнитного поля. В одном варианте осуществления изобретения средства 11 для измерения внешнего магнитного поля содержат магниторезистивный датчик. Настоящее изобретение рассмотрено выше с помощью нескольких примеров вариантов его осуществления. Для специалиста в данной области техники очевидно, что изобретение не ограничено описанными выше вариантами осуществления, но возможны также другие его применения в пределах концепции изобретения, определенной представленными ниже пунктами формулы изобретения. Для специалиста в данной области техники очевидно, что система лифта в соответствии с изобретением может содержать противовес или система лифта также может быть без противовеса. Также очевидно для специалиста в данной области техники, что измерительное устройство в соответствии с изобретением может быть установлено в выбранной позиции в шахте лифта, в таком случае идентификатор положения в соответствии с изобретением может быть установлен соединенным с кабиной лифта. В этом случае взаимное расположение идентификатора положения и измерительного устройства аналогичны представленному в настоящем изобретении. Кроме того, для специалиста в данной области техники очевидно, что система лифта в соответствии с изобретением может содержать более одной кабины лифта, размещенной в одной и той же шахте лифта. В этом случае измерительное устройство в соответствии с изобретением может быть соединено с более чем одной кабиной лифта, размещенной в одной и той же шахте лифта. Дополнительно, для специалиста в данной области техники очевидно, что измерительное устройство в соответствии с изобретением может быть закреплено в соединении с механическим устройством,которое перемещается вместе с кабиной лифта, например, в соединении со стропом кабины лифта или с противовесом. Также очевидно для специалиста в данной области техники, что в оконечной зоне шахты лифта может быть соответствующим образом установлено большее количество идентификаторов положения для определения дополнительных оконечных границ. В этом случае безопасность системы лифта может быть дополнительно улучшена, например, когда скорость кабины лифта и/или область перемещения механического концевого амортизатора возрастает. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для определения положения кабины (1) лифта относительно уровня этажа в шахте (2) лифта, отличающееся тем, что содержит измерительное устройство (3), прикрепленное к кабине (1) лифта и выполненное с возможностью формирования электромагнитного радиочастотного измерительного сигнала (5); идентификатор (4) положения, установленный относительно шахты (2) лифта в районе указанного уровня этажа и содержащий два блока (9, 9') RFID, причем каждый блок (9, 9') RFID выполнен с возможностью индуктивного подключения к упомянутому электромагнитному измерительному сигналу (5), а также с возможностью отправки, после подключения, идентификационной информации измерительному устройству (3), при этом идентификатор (4) положения установлен так, что один из блоков RFID расположен выше, а другой - ниже указанного уровня этажа на таком заранее заданном расстоянии друг от друга, что зоны, определяемые блоками (9, 9') RFID, частично перекрываются на указанном уровне этажа, а измерительное устройство (3) выполнено с возможностью определения положения кабины (1) лифта как соответствующего указанному уровню этажа в месте, где измерительное устройство регистрирует идентификационную информацию как от верхнего (9), так и от нижнего (9') блоков RFID. 2. Устройство по п.1, отличающееся тем, что в измерительном устройстве (3) размещены средства(11) для измерения внешнего магнитного поля, а идентификатор (4) положения содержит постоянно намагниченный маркерный участок (12), включающий по меньшей мере две последовательные магнитные области (13, 13'), магнитные полюса которых направлены в противоположных направлениях, причем указанные последовательные магнитные области расположены на заданном расстоянии друг от друга в направлении перемещения кабины лифта. 3. Устройство по п.2, отличающееся тем, что в измерительном устройстве (3) размещены средства(11) для измерения внешнего магнитного поля, а идентификатор (4) положения содержит постоянно намагниченный маркерный участок (12), включающий четыре магнитные области (13, 13'), установленные последовательно, причем магнитные полюса двух областей из последовательных магнитных областей всегда направлены в противоположных направлениях, при этом указанные последовательные магнитные области размещены на заданном расстоянии друг от друга в направлении перемещения кабины лифта. 4. Способ определения положения кабины (1) лифта относительно уровня этажа в шахте (2) лифта с использованием устройства по п.1, включающий формирование электромагнитного радиочастотного измерительного сигнала (5) посредством измерительного устройства (3), прикрепленного к кабине (1) лифта; отправку измерительному устройству (3) каждым блоком (9, 9') RFID, после индуктивного подключения к упомянутому электромагнитному измерительному сигналу (5), идентификационной информации и определение измерительным устройством (3) положения кабины (1) лифта как соответствующего указанному уровню этажа в месте, где измерительное устройство регистрирует идентификационную информацию как от верхнего (9), так и от нижнего (9') блоков RFID. 5. Способ по п.4, отличающийся тем, что идентификационную информацию (7) блока (9, 9') RFID передают как часть импульсной последовательности (6), сформированной идентификатором положения; контрольную сумму (8) идентификационной информации передают как часть импульсной последовательности (6), сформированной идентификатором положения. 6. Способ по любому из пп.4, 5, отличающийся тем, что в измерительном устройстве (3) размещены средства (11) для измерения внешнего магнитного поля; по меньшей мере две соседние постоянно намагниченные магнитные области (13, 13') размещены на маркерном участке (12) так, что магнитные полюса соседних магнитных областей направлены в про-5 022381 тивоположных направлениях; постоянно намагниченный маркерный участок (12) размещен в идентификаторе (4) положения так,чтобы упомянутые соседние магнитные области (13, 13') следовали через установленное расстояние друг от друга в направлении перемещения кабины лифта. 7. Идентификатор (4) положения для определения положения перемещающегося объекта, содержащий два блока (9, 9') RFID, расположенных друг от друга на таком заранее заданном расстоянии в направлении перемещения объекта, что зоны, определяемые блоками (9, 9') RFID, частично перекрываются; и крепежное приспособление для фиксации идентификатора положения относительно пути (2) перемещения объекта,при этом идентификатор (4) положения выполнен с возможностью фиксации для ориентирования антенн блоков (9, 9') RFID так, чтобы антенны индуктивно подключались к радиочастотному измерительному сигналу (5), сформированному в направлении, по существу, перпендикулярном направлению перемещения объекта.
МПК / Метки
МПК: B66B 3/02
Метки: положения, определения, способ, кабины, лифта, устройство
Код ссылки
<a href="https://eas.patents.su/8-22381-ustrojjstvo-i-sposob-opredeleniya-polozheniya-kabiny-lifta.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство и способ определения положения кабины лифта</a>
Способ и устройство для предотвращения непредусмотренного перемещения кабины лифта
Номер патента: 21716
Опубликовано: 31.08.2015
Авторы: Виита-Ахо Тарво, Каартинен Раймо, Кантола Яри
Метки: непредусмотренного, лифта, предотвращения, перемещения, способ, устройство, кабины
Формула / Реферат:
1. Способ предотвращения смещения кабины (1) лифта от этажа (10) остановки, включающий:a) систематический контроль рабочего состояния одного или более машинных тормозов (3) подъемного механизма (2) лифта,b) остановку кабины (1) лифта с помощью указанных одного или более тормозов (3) подъемного механизма в случае, если она покидает дверную зону (4) этажа (10) остановки при открытой двери (6) кабины лифта и/или двери (37) посадочной площадки,c)...
Устройство для управления и блокировки двери кабины лифта
Номер патента: 17467
Опубликовано: 28.12.2012
Автор: Китович Роман Владимирович
МПК: B66B 13/12
Метки: управления, кабины, блокировки, лифта, двери, устройство
Формула / Реферат:
Устройство для управления и блокировки двери кабины лифта, содержащее исполнительное устройство (1), на осях(10), (11) основания (9) которого установлены рычаги (12), (13) с возможностью поворота и изменения расстояния между полозьями (14), закрепленными на этих рычагах (12), (13), упомянутые полозья (14) имеют возможность взаимодействия с роликами (15) двери шахты, при этом исполнительное устройство (1) имеет блокирующий рычаг (20) с осью (26)...
Ловитель кабины лифта
Номер патента: 12815
Опубликовано: 30.12.2009
Авторы: Горбатенко Михаил Владимирович, Попковский Денис Викторович, Тюков Анатолий Владимирович, Рудник Петр Михайлович, Балабанов Игорь Николаевич, Денисов Евгений Герасимович
МПК: B66B 11/04
Метки: кабины, ловитель, лифта
Формула / Реферат:
Ловитель кабины лифта, содержащий закрепленную на основании колодку с клином, установленным с возможностью перемещения по колодке, упругий башмак, дополнительный тормозной башмак, установленный с возможностью взаимодействия с направляющей, и роликовую обойму, смонтированную между колодкой и клином, отличающийся тем, что в основании дополнительно размещены колодка с клином и установленная между ними роликовая обойма, приводной вал и фиксаторы,...
Система лифта
Номер патента: 12739
Опубликовано: 30.12.2009
Авторы: Гелахов Игорь Петрович, Балабанов Игорь Николаевич, Шумаев Александр Петрович, Тюков Анатолий Владимирович, Рудник Петр Михайлович
МПК: B66B 13/22, B66B 5/02
Формула / Реферат:
Система лифта, содержащая приводной блок, установленную с возможностью перемещения в шахте лифта кабину лифта, управляющее устройство для управления приводным блоком, шину данных, которая соединена с устройством управления, двери шахты для закрывания шахты лифта, устройства блокировки для блокировки со стороны шахты дверей шахты и датчики блокировки для контролирования положения устройств блокировки, при этом датчики блокировки дверей шахты...
Устройство для определения взаимного положения двух по существу плоских элементов
Номер патента: 11464
Опубликовано: 28.04.2009
Авторы: Куртц Райнер, Хюбш Вольфрам, Каннон Марк, Грумм Харальд
Метки: двух, взаимного, устройство, определения, элементов, существу, плоских, положения
Формула / Реферат:
1. Устройство для определения взаимного положения в плоскости Х-Y двух, по существу, плоских элементов, расположенных, по существу, один над другим на расстоянии друг от друга в направлении Z, содержащее по меньшей мере один расположенный между указанными элементами оптический регистрирующий прибор, позволяющий регистрировать по меньшей мере по две точки на обращенных друг к другу поверхностях элементов, и блок обработки, выполненный с...
Предыдущий патент: Способ и композиция для улучшенного извлечения углеводородов
Следующий патент: Способ получения сернистого цементного продукта и предназначенная для него смесь гранул серы и гранул твердой композиции
Случайный патент: Устройство для контроля угловых параметров систем с поворотным головным зеркалом