Зонд для определения границ между веществами
Номер патента: 22686
Опубликовано: 29.02.2016
Авторы: Ваухконен Марко, Реунанен Юха, Лехикойнен Ансси, Кайпио Яри


Формула / Реферат
1. Способ обнаружения местоположения границы или границ веществ, заключенных в объеме, включающем по меньшей мере одно вещество, при этом по меньшей мере часть упомянутого объема представляет собой жидкое вещество, с использованием набора зондов, включающего по меньшей мере один зонд, причем упомянутый способ включает следующие шаги:
введение набора зондов, включающего электроды, в исследуемый объем;
подачу тока или напряжения на электроды и измерение тока или напряжения на электродах, а также обработку результатов измерений;
отличающийся тем, что набор зондов содержит по меньшей мере три электрода, причем упомянутые по меньшей мере три электрода, по существу, не расположены вдоль прямой линии, при этом все электроды из упомянутого набора зондов расположены только в объеме жидкого вещества так, чтобы обеспечить возможность измерения тока или напряжения в области границы или границ веществ;
причем упомянутый способ включает также следующие шаги:
определение распределения электрической проводимости в упомянутом исследуемом объеме на основе результатов упомянутого измерения и
определение на основе упомянутого распределения электрической проводимости и информации о местоположении электродов местоположения по меньшей мере одной границы веществ в упомянутом исследуемом объеме.
2. Способ по п.1, отличающийся тем, что он включает выполнение упомянутого шага подачи тока и измерения с использованием электроимпедансной томографии (EIT) или электрорезистивной томографии (ERT).
3. Способ по п.2, отличающийся тем, что он включает шаг размещения упомянутых электродов по меньшей мере на одном зонде из упомянутого набора зондов так, что векторы между упомянутыми электродами охватывают трехмерное подпространство.
4. Способ по п.2, отличающийся тем, что он включает шаг размещения упомянутых электродов по меньшей мере на двух отдельных зондах, при этом упомянутые электроды на каждом зонде размещают, по существу, на прямой линии.
5. Способ по п.2, отличающийся тем, что он включает шаг использования 1D-s-способа решения стандартной задачи обратного преобразования в упомянутом вычислении для нахождения плоских профилей упомянутых границ.
6. Способ по п.2, отличающийся тем, что он включает шаг определения функции измеренных значений напряжения или тока для требуемых числовых значений, представляющих упомянутую границу, с помощью методов машинного обучения.
7. Способ по п.6, отличающийся тем, что он включает шаг использования результатов, полученных на основе моделирования, в качестве обучающего материала для упомянутых методов машинного обучения.
8. Способ по п.6, отличающийся тем, что упомянутый применяемый метод машинного обучения представляет собой MLP-сеть (многоуровневый перцептрон).
9. Способ по п.8, отличающийся тем, что упомянутую MLP-сеть обучают с использованием алгоритма Левенберга-Марквардта.
10. Способ по п.2, отличающийся тем, что он включает шаг контроля загрязнения упомянутых электродов с помощью оценки контактных импедансов между каждым электродом и окружающим веществом.
11. Система для обнаружения местоположения границы или границ веществ, заключенных в объеме, включающем по меньшей мере одно вещество, при этом по меньшей мере часть упомянутого объема представляет собой жидкое вещество, с использованием набора зондов, включающего по меньшей мере один зонд, при этом упомянутая система включает
набор зондов (40, 52, 52а, 52b), включающий электроды (41, 52), размещаемые в исследуемом объеме;
средства (53) подачи питания для подачи тока или напряжения на электроды и средства (53) измерения для измерения тока или напряжения на электродах, а также процессор (53) для обработки результатов измерений;
отличающаяся тем, что она также содержит по меньшей мере три электрода из упомянутого набора зондов (40, 52, 52а, 62b), размещаемые в упомянутом исследуемом объеме в виде узла, причем упомянутые по меньшей мере три электрода, по существу, не расположены вдоль прямой линии, при этом все электроды из упомянутого набора зондов могут быть расположены только в объеме жидкого вещества так, чтобы обеспечить возможность измерения тока или напряжения в области границы или границ веществ;
при этом упомянутый процессор (53) выполнен с возможностью определения распределения электрической проводимости в упомянутом исследуемом объеме на основе результатов упомянутого измерения и определения местоположения по меньшей мере одной возможной границы веществ в упомянутом исследуемом объеме на основе упомянутого распределения электрической проводимости и информации о местоположении упомянутых электродов.
12. Система по п.11, отличающаяся тем, что средства (53) подачи тока и измерения сконфигурированы для выполнения упомянутых шагов подачи питания и измерения с использованием электроимпедансной томографии (EIT) или электрорезистивной томографии (ERT).
13. Система по п.12, отличающаяся тем, что она также включает электроды (41i, 52i), размещенные по меньшей мере на одном зонде (40, 52, 52а, 52b) из упомянутого набора зондов так, что векторы между упомянутыми электродами (41i, 52i) охватывают трехмерное подпространство.
14. Система по п.12, отличающаяся тем, что она также включает электроды (52ia,b), размещенные по меньшей мере на двух отдельных зондах (52а, 52b), при этом упомянутые электроды на каждом зонде размещены, по существу, на прямой линии.
15. Система по п.12, отличающаяся тем, что упомянутый процессор (53) выполнен с возможностью использования 1D-s-способа решения стандартной задачи обратного преобразования в упомянутом вычислении для нахождения плоских профилей упомянутых границ.
16. Система по п.12, отличающаяся тем, что упомянутый процессор (53) выполнен с возможностью определения функции измеренных значений напряжения или тока для требуемых числовых значений, представляющих упомянутую границу, с помощью методов машинного обучения.
17. Система по п.16, отличающаяся тем, что упомянутый процессор (53) выполнен с возможностью использования результатов, полученных на основе моделирования, в качестве обучающего материала для упомянутых методов машинного обучения.
18. Система по п.16, отличающаяся тем, что упомянутый применяемый метод машинного обучения представляет собой MLP-сеть (многоуровневый перцептрон).
19. Система по п.18, отличающаяся тем, что упомянутая MLP-сеть выполнена с возможностью обучения с использованием алгоритма Левенберга-Марквардта.
20. Система по п.12, отличающаяся тем, что она также включает упомянутые средства (53) измерения для контроля загрязнения упомянутых электродов путем оценки контактных импедансов между каждым из электродов (41i, 52i) и окружающим веществом.

Текст
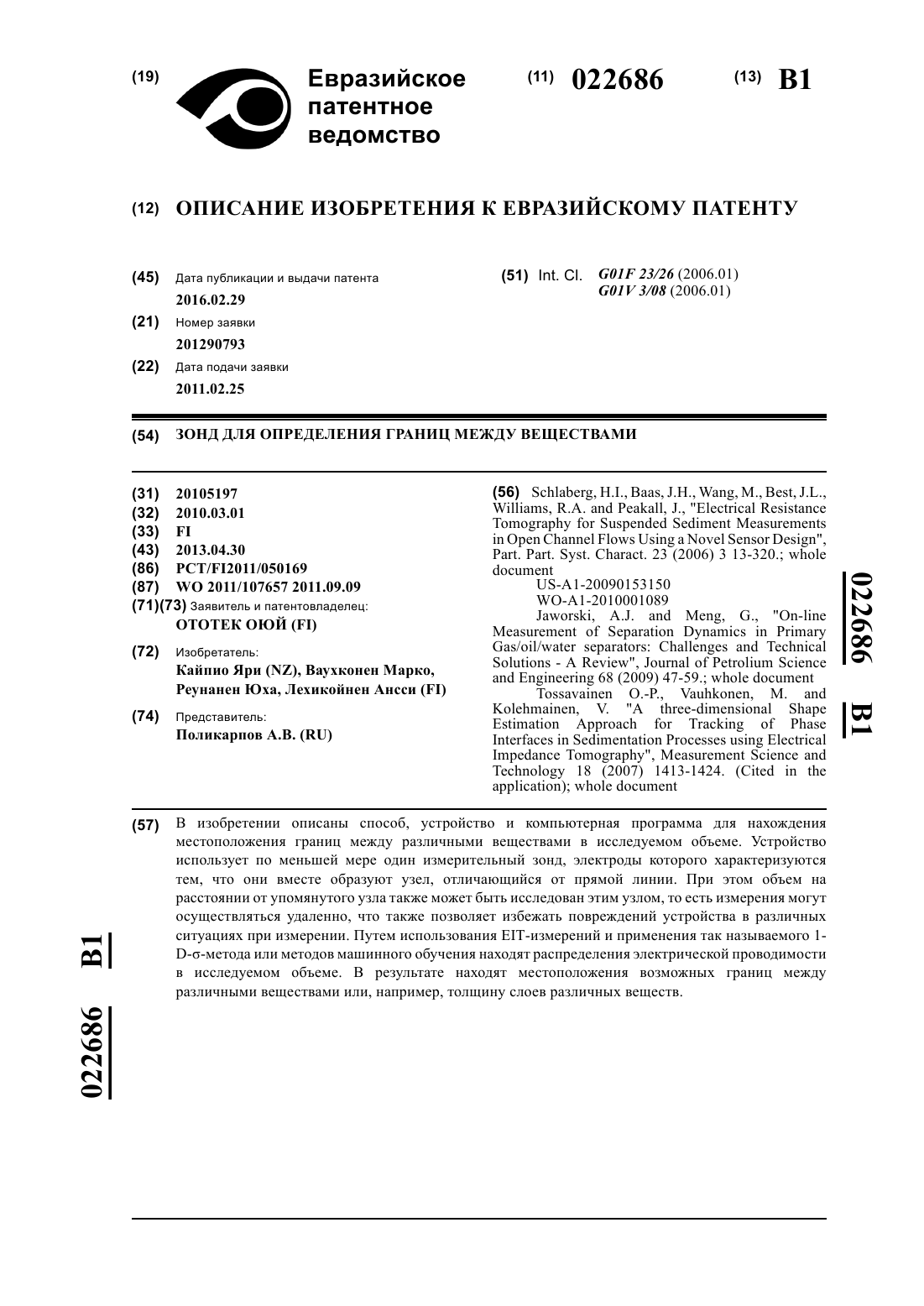
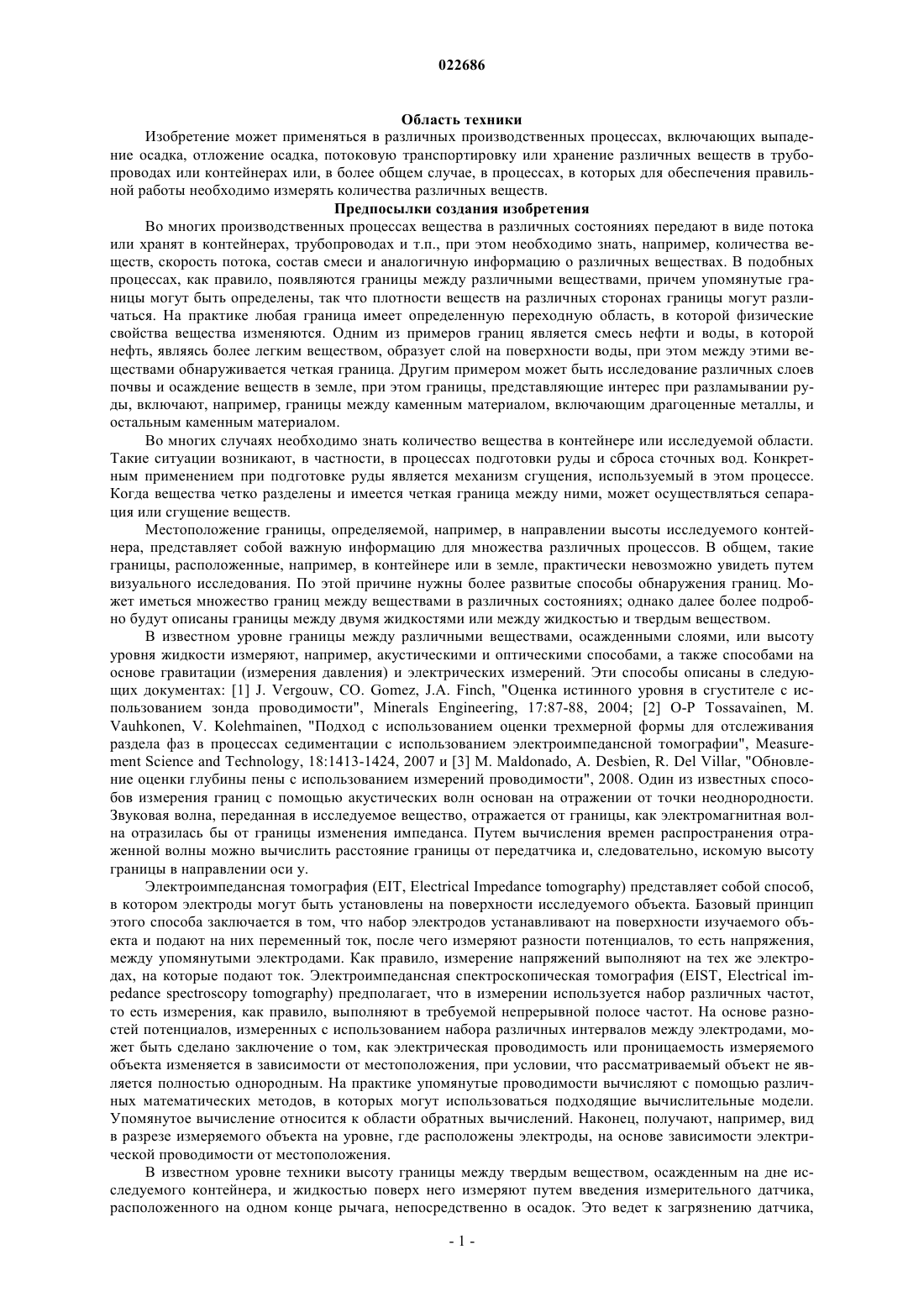
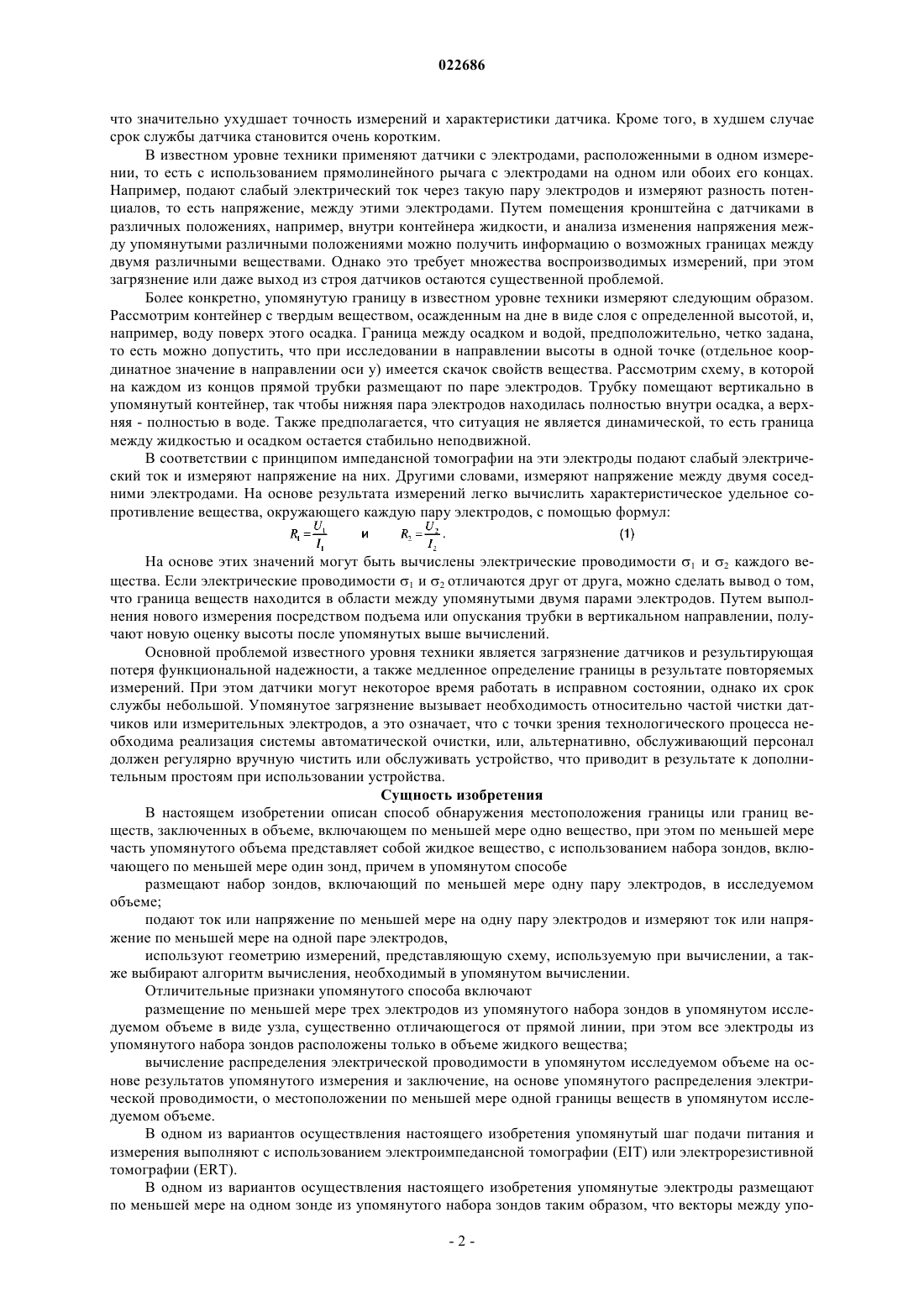
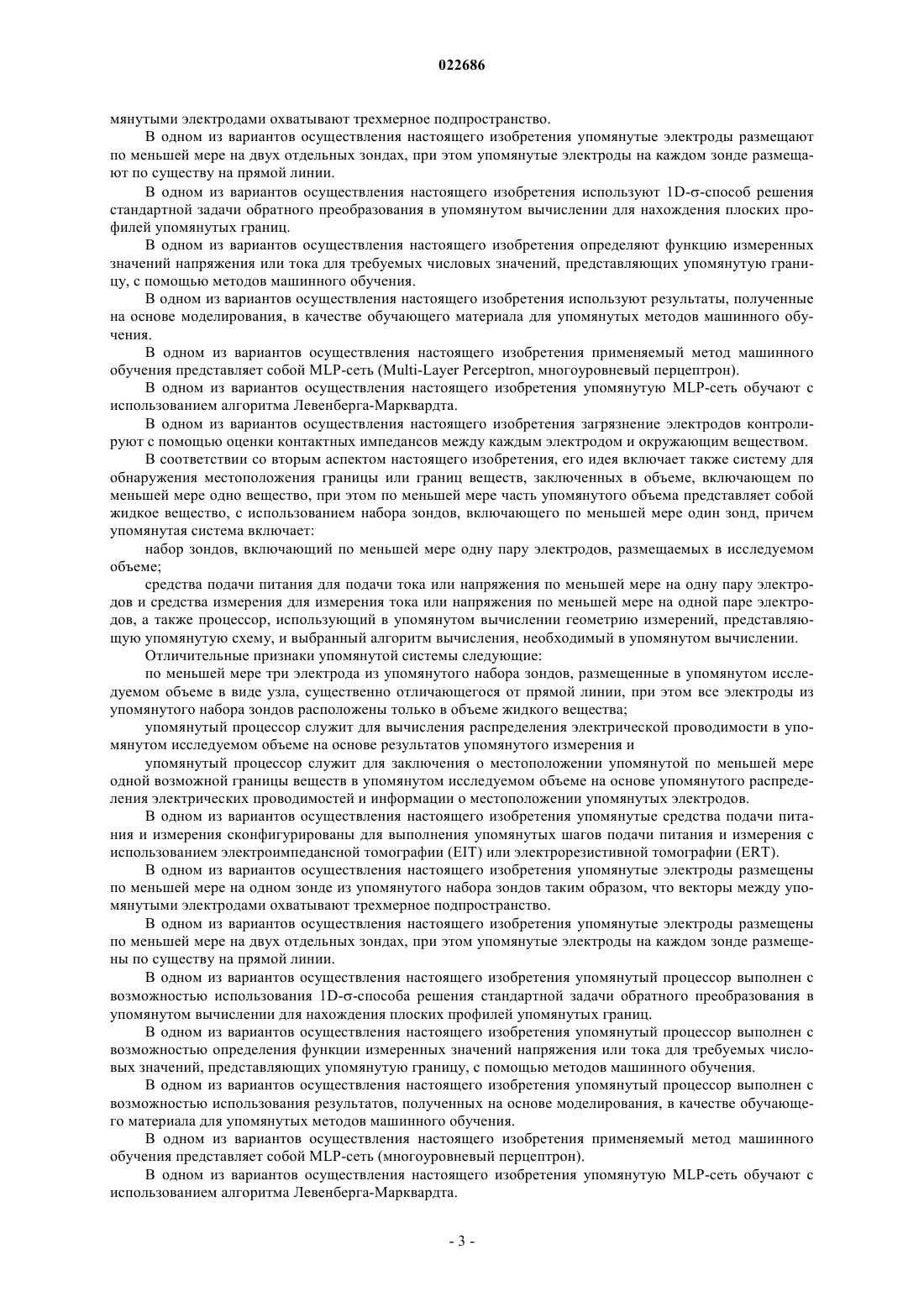
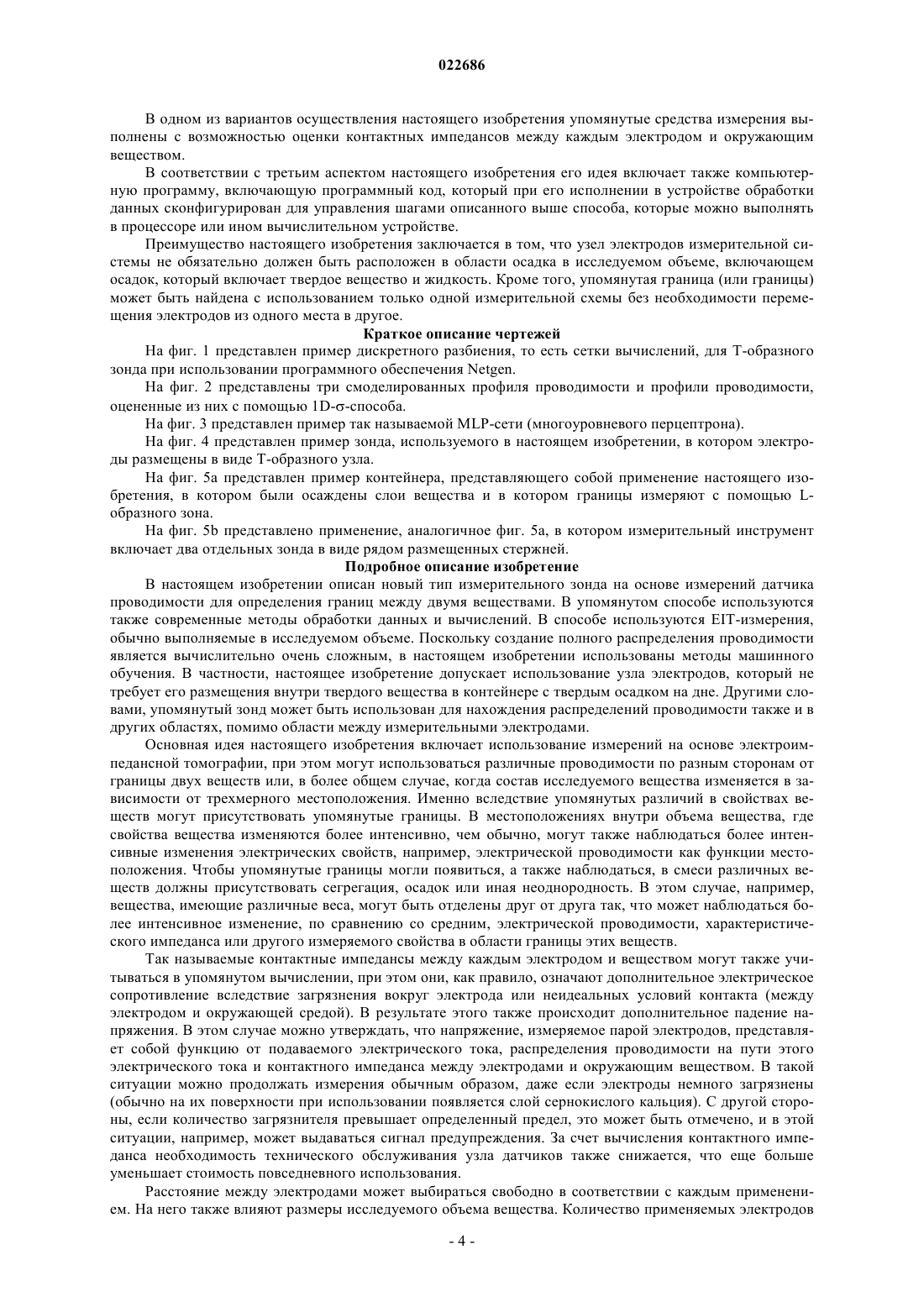
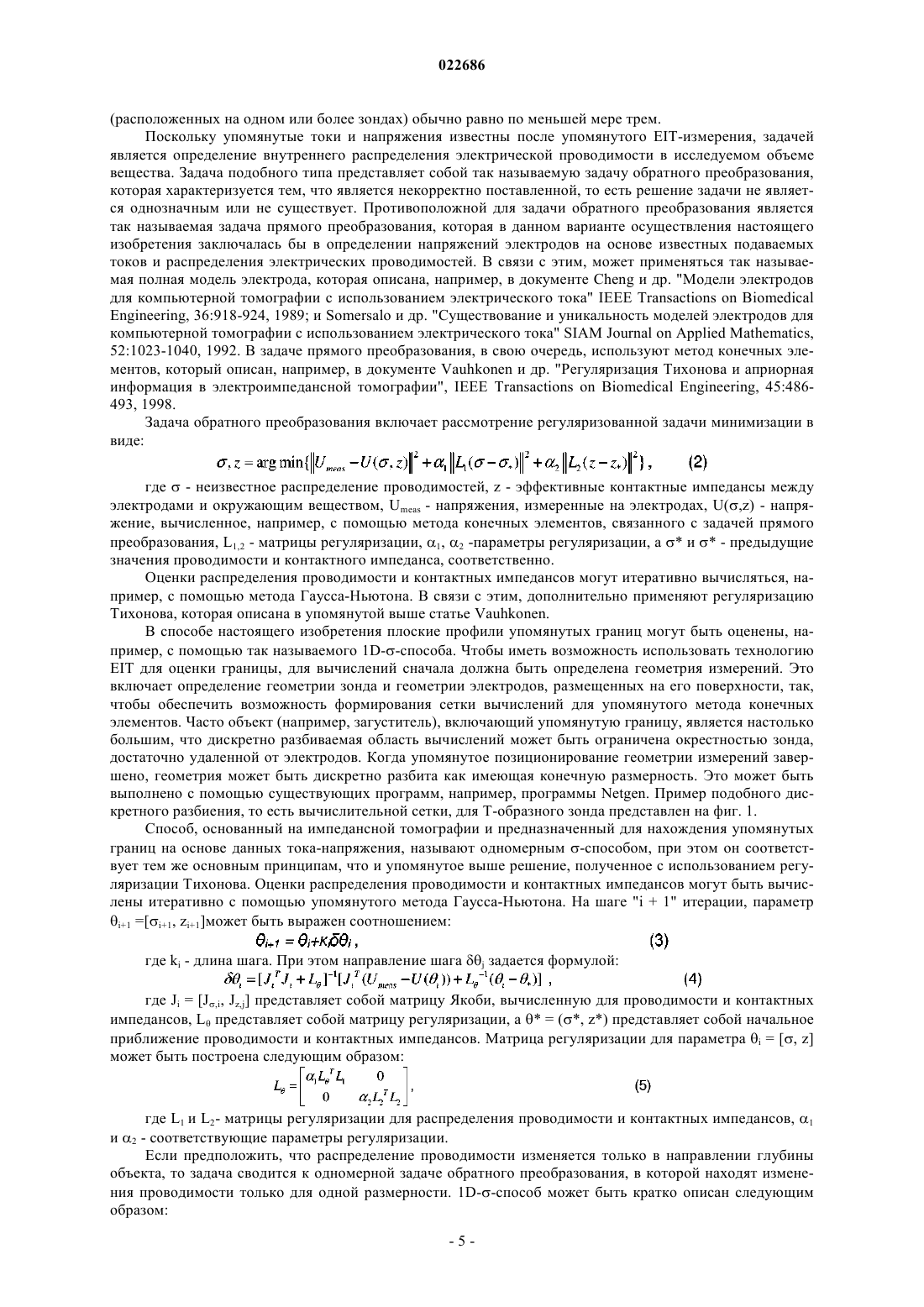
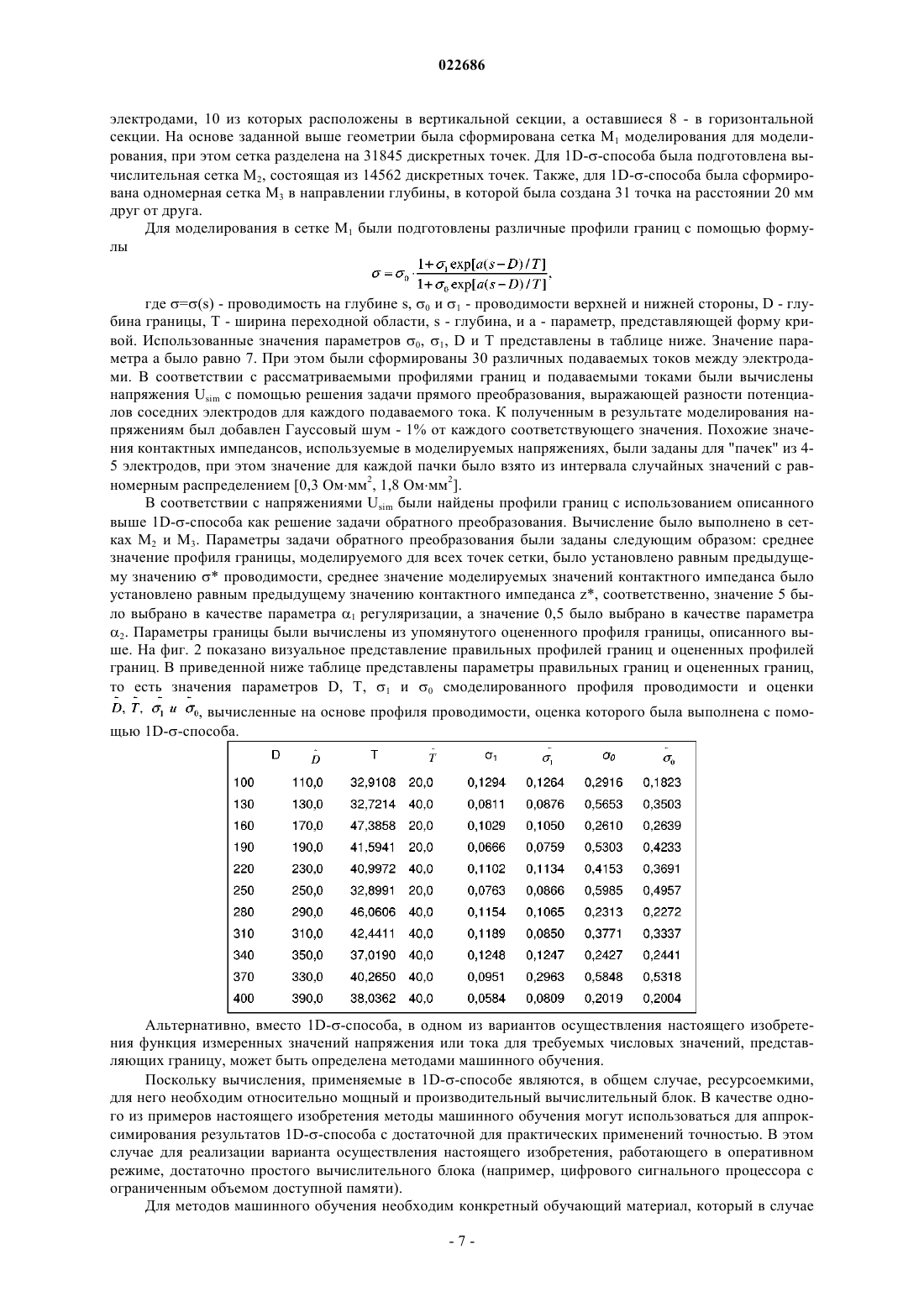
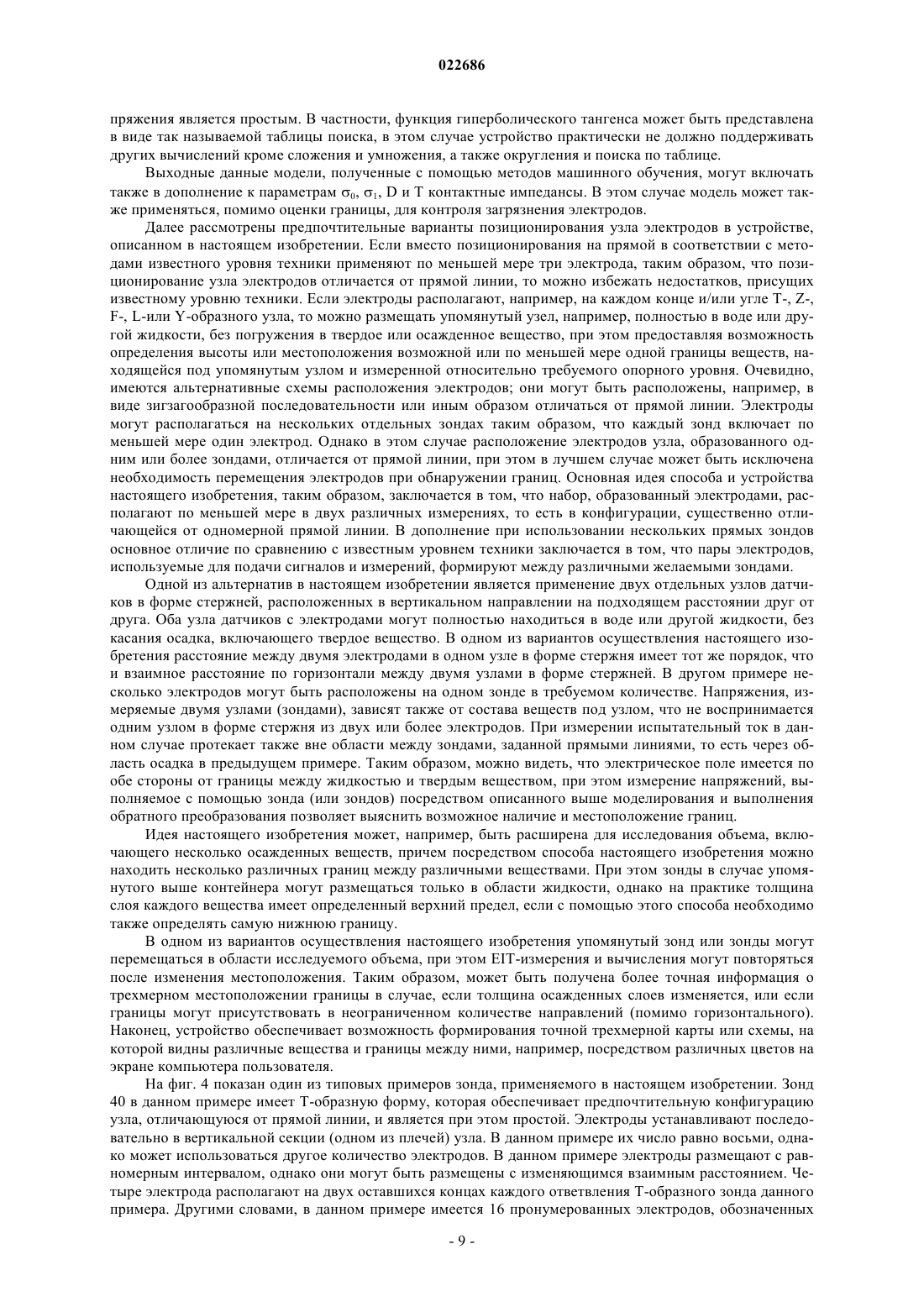
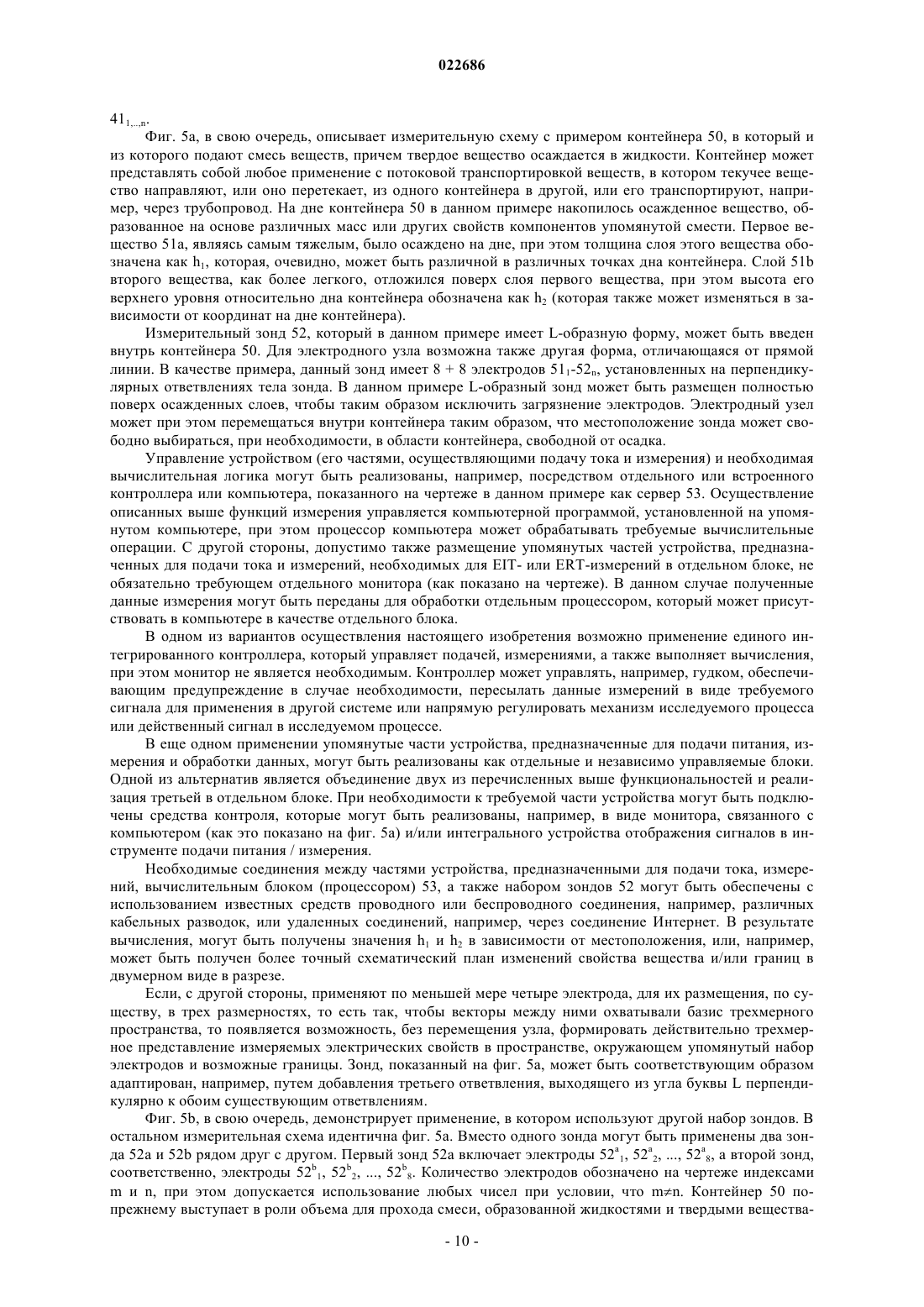
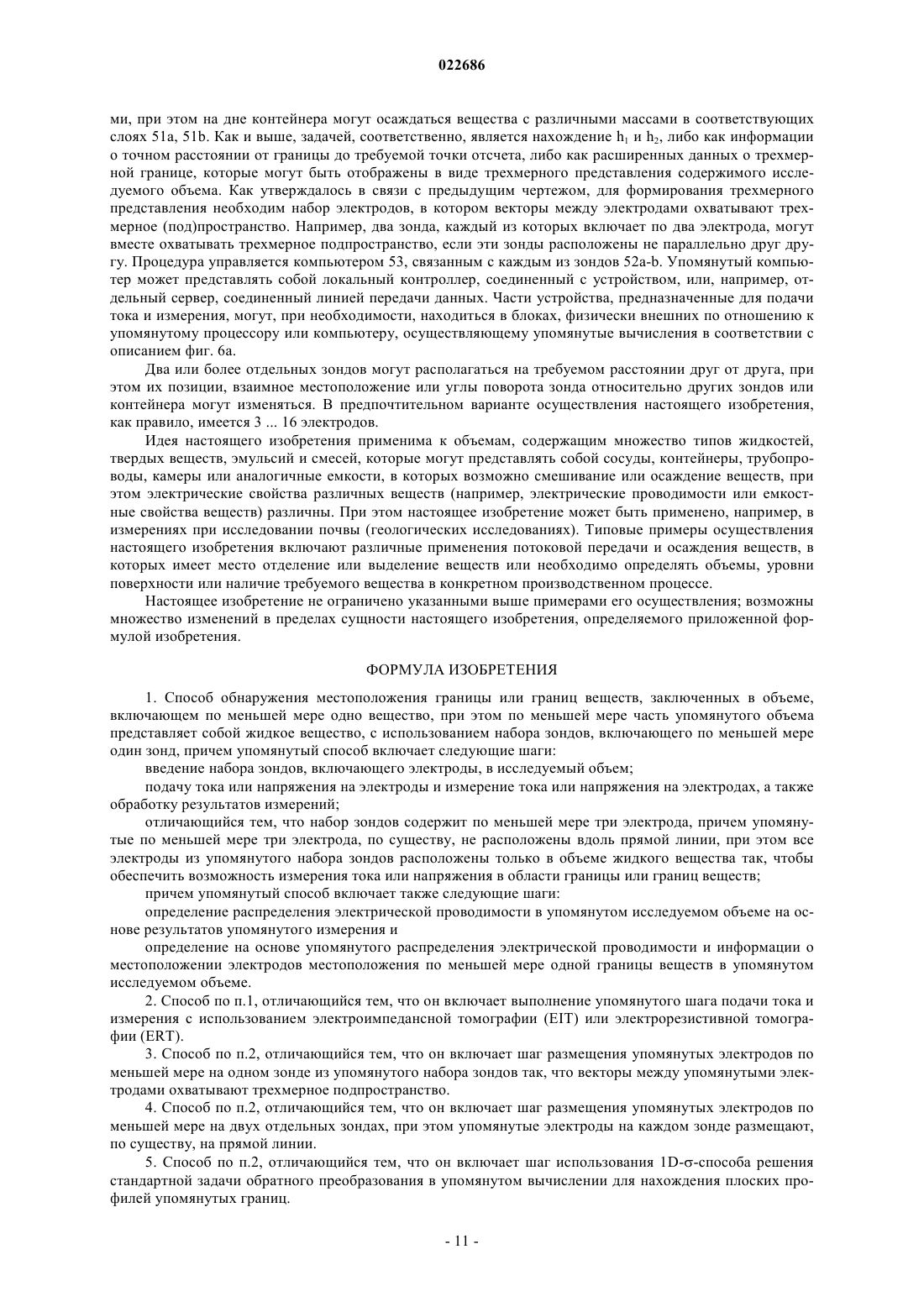
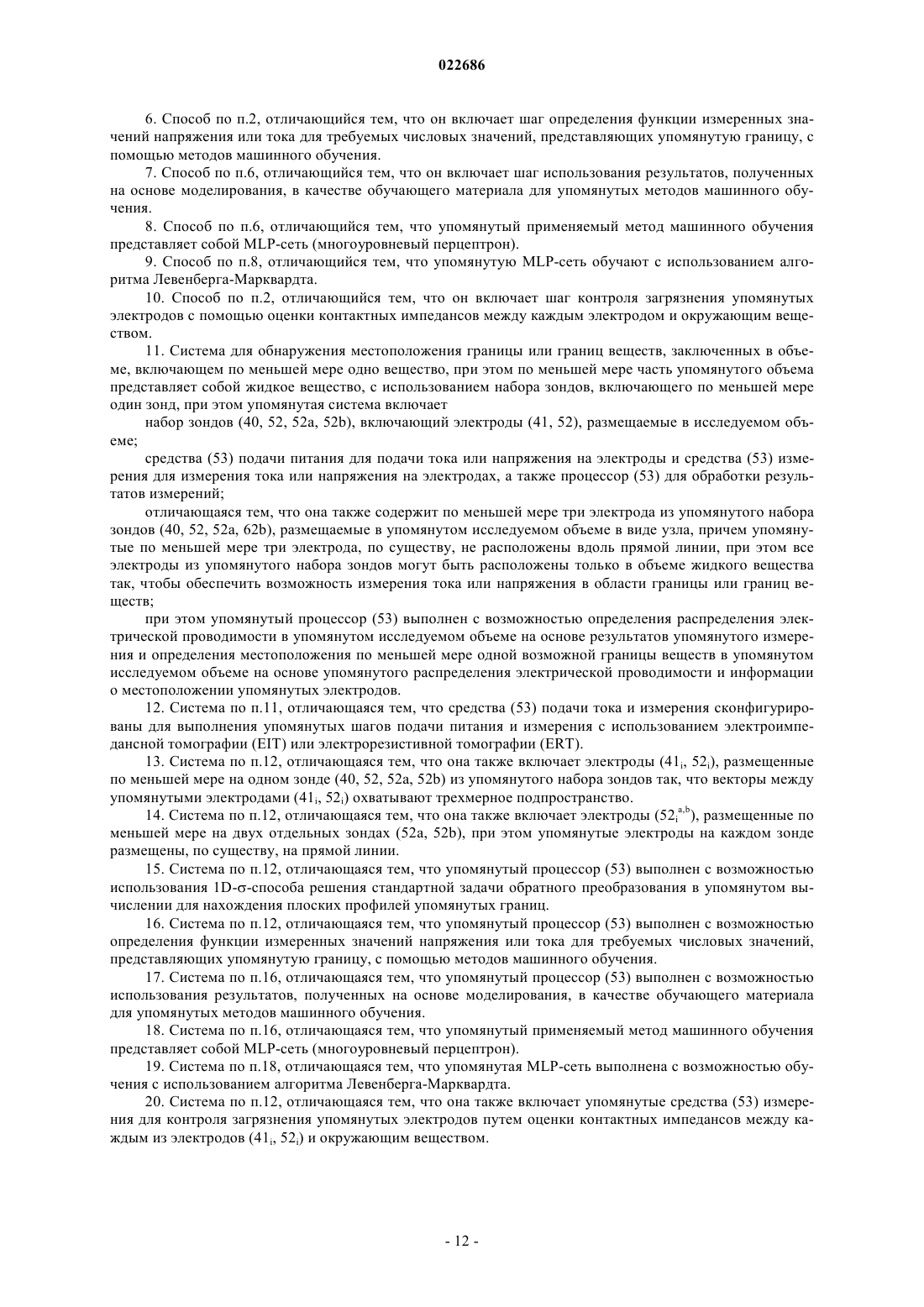
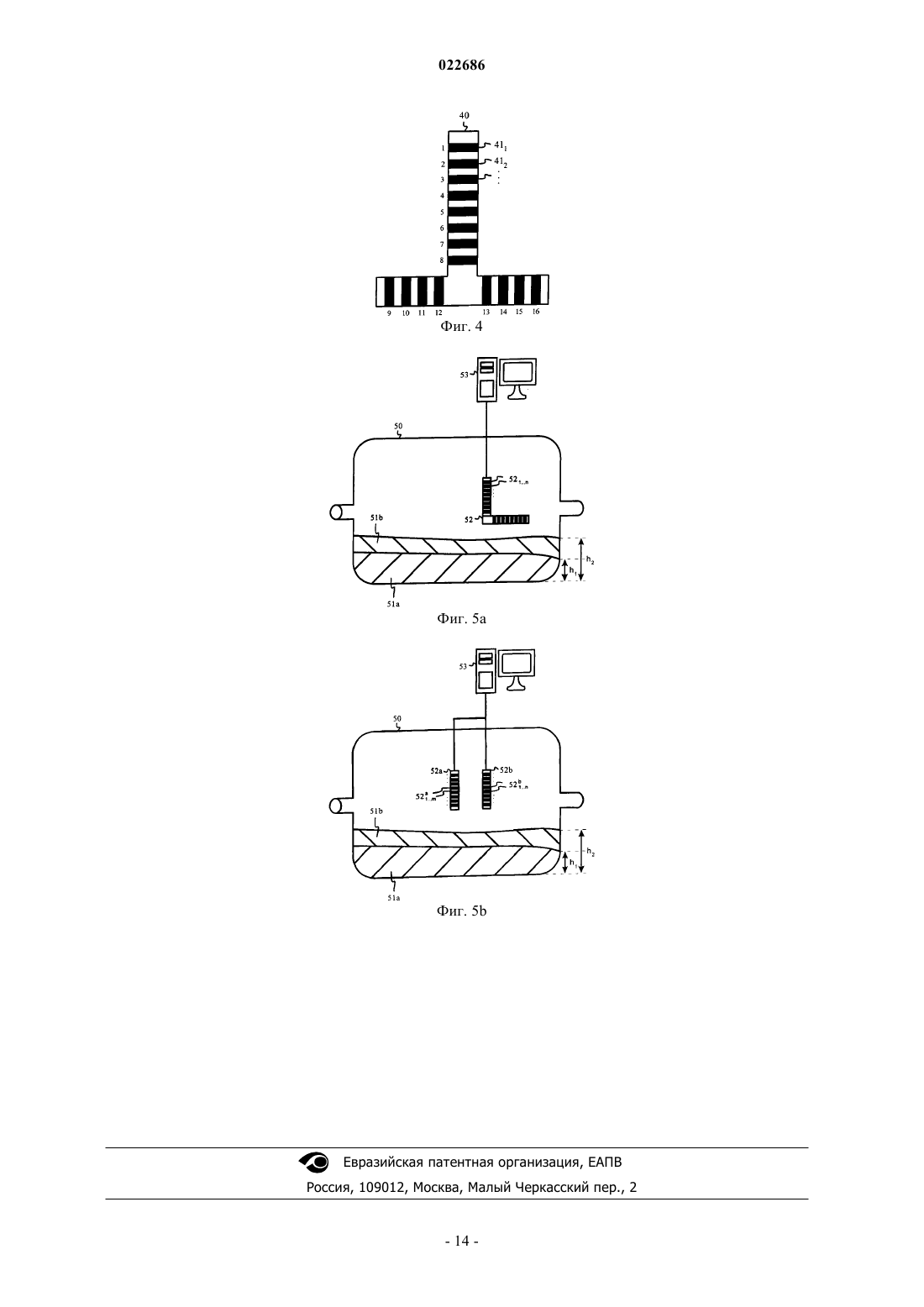
ЗОНД ДЛЯ ОПРЕДЕЛЕНИЯ ГРАНИЦ МЕЖДУ ВЕЩЕСТВАМИ В изобретении описаны способ, устройство и компьютерная программа для нахождения местоположения границ между различными веществами в исследуемом объеме. Устройство использует по меньшей мере один измерительный зонд, электроды которого характеризуются тем, что они вместе образуют узел, отличающийся от прямой линии. При этом объем на расстоянии от упомянутого узла также может быть исследован этим узлом, то есть измерения могут осуществляться удаленно, что также позволяет избежать повреждений устройства в различных ситуациях при измерении. Путем использования EIT-измерений и применения так называемого 1Dметода или методов машинного обучения находят распределения электрической проводимости в исследуемом объеме. В результате находят местоположения возможных границ между различными веществами или, например, толщину слоев различных веществ. Область техники Изобретение может применяться в различных производственных процессах, включающих выпадение осадка, отложение осадка, потоковую транспортировку или хранение различных веществ в трубопроводах или контейнерах или, в более общем случае, в процессах, в которых для обеспечения правильной работы необходимо измерять количества различных веществ. Предпосылки создания изобретения Во многих производственных процессах вещества в различных состояниях передают в виде потока или хранят в контейнерах, трубопроводах и т.п., при этом необходимо знать, например, количества веществ, скорость потока, состав смеси и аналогичную информацию о различных веществах. В подобных процессах, как правило, появляются границы между различными веществами, причем упомянутые границы могут быть определены, так что плотности веществ на различных сторонах границы могут различаться. На практике любая граница имеет определенную переходную область, в которой физические свойства вещества изменяются. Одним из примеров границ является смесь нефти и воды, в которой нефть, являясь более легким веществом, образует слой на поверхности воды, при этом между этими веществами обнаруживается четкая граница. Другим примером может быть исследование различных слоев почвы и осаждение веществ в земле, при этом границы, представляющие интерес при разламывании руды, включают, например, границы между каменным материалом, включающим драгоценные металлы, и остальным каменным материалом. Во многих случаях необходимо знать количество вещества в контейнере или исследуемой области. Такие ситуации возникают, в частности, в процессах подготовки руды и сброса сточных вод. Конкретным применением при подготовке руды является механизм сгущения, используемый в этом процессе. Когда вещества четко разделены и имеется четкая граница между ними, может осуществляться сепарация или сгущение веществ. Местоположение границы, определяемой, например, в направлении высоты исследуемого контейнера, представляет собой важную информацию для множества различных процессов. В общем, такие границы, расположенные, например, в контейнере или в земле, практически невозможно увидеть путем визуального исследования. По этой причине нужны более развитые способы обнаружения границ. Может иметься множество границ между веществами в различных состояниях; однако далее более подробно будут описаны границы между двумя жидкостями или между жидкостью и твердым веществом. В известном уровне границы между различными веществами, осажденными слоями, или высоту уровня жидкости измеряют, например, акустическими и оптическими способами, а также способами на основе гравитации (измерения давления) и электрических измерений. Эти способы описаны в следующих документах: [1] J. Vergouw, CO. Gomez, J.A. Finch, "Оценка истинного уровня в сгустителе с использованием зонда проводимости", Minerals Engineering, 17:87-88, 2004; [2] О-Р Tossavainen, M.Vauhkonen, V. Kolehmainen, "Подход с использованием оценки трехмерной формы для отслеживания раздела фаз в процессах седиментации с использованием электроимпедансной томографии", Measurement Science and Technology, 18:1413-1424, 2007 и [3] M. Maldonado, A. Desbien, R. Del Villar, "Обновление оценки глубины пены с использованием измерений проводимости", 2008. Один из известных способов измерения границ с помощью акустических волн основан на отражении от точки неоднородности. Звуковая волна, переданная в исследуемое вещество, отражается от границы, как электромагнитная волна отразилась бы от границы изменения импеданса. Путем вычисления времен распространения отраженной волны можно вычислить расстояние границы от передатчика и, следовательно, искомую высоту границы в направлении оси у. Электроимпедансная томография (EIT, Electrical Impedance tomography) представляет собой способ,в котором электроды могут быть установлены на поверхности исследуемого объекта. Базовый принцип этого способа заключается в том, что набор электродов устанавливают на поверхности изучаемого объекта и подают на них переменный ток, после чего измеряют разности потенциалов, то есть напряжения,между упомянутыми электродами. Как правило, измерение напряжений выполняют на тех же электродах, на которые подают ток. Электроимпедансная спектроскопическая томография (EIST, Electrical impedance spectroscopy tomography) предполагает, что в измерении используется набор различных частот,то есть измерения, как правило, выполняют в требуемой непрерывной полосе частот. На основе разностей потенциалов, измеренных с использованием набора различных интервалов между электродами, может быть сделано заключение о том, как электрическая проводимость или проницаемость измеряемого объекта изменяется в зависимости от местоположения, при условии, что рассматриваемый объект не является полностью однородным. На практике упомянутые проводимости вычисляют с помощью различных математических методов, в которых могут использоваться подходящие вычислительные модели. Упомянутое вычисление относится к области обратных вычислений. Наконец, получают, например, вид в разрезе измеряемого объекта на уровне, где расположены электроды, на основе зависимости электрической проводимости от местоположения. В известном уровне техники высоту границы между твердым веществом, осажденным на дне исследуемого контейнера, и жидкостью поверх него измеряют путем введения измерительного датчика,расположенного на одном конце рычага, непосредственно в осадок. Это ведет к загрязнению датчика,-1 022686 что значительно ухудшает точность измерений и характеристики датчика. Кроме того, в худшем случае срок службы датчика становится очень коротким. В известном уровне техники применяют датчики с электродами, расположенными в одном измерении, то есть с использованием прямолинейного рычага с электродами на одном или обоих его концах. Например, подают слабый электрический ток через такую пару электродов и измеряют разность потенциалов, то есть напряжение, между этими электродами. Путем помещения кронштейна с датчиками в различных положениях, например, внутри контейнера жидкости, и анализа изменения напряжения между упомянутыми различными положениями можно получить информацию о возможных границах между двумя различными веществами. Однако это требует множества воспроизводимых измерений, при этом загрязнение или даже выход из строя датчиков остаются существенной проблемой. Более конкретно, упомянутую границу в известном уровне техники измеряют следующим образом. Рассмотрим контейнер с твердым веществом, осажденным на дне в виде слоя с определенной высотой, и,например, воду поверх этого осадка. Граница между осадком и водой, предположительно, четко задана,то есть можно допустить, что при исследовании в направлении высоты в одной точке (отдельное координатное значение в направлении оси y) имеется скачок свойств вещества. Рассмотрим схему, в которой на каждом из концов прямой трубки размещают по паре электродов. Трубку помещают вертикально в упомянутый контейнер, так чтобы нижняя пара электродов находилась полностью внутри осадка, а верхняя - полностью в воде. Также предполагается, что ситуация не является динамической, то есть граница между жидкостью и осадком остается стабильно неподвижной. В соответствии с принципом импедансной томографии на эти электроды подают слабый электрический ток и измеряют напряжение на них. Другими словами, измеряют напряжение между двумя соседними электродами. На основе результата измерений легко вычислить характеристическое удельное сопротивление вещества, окружающего каждую пару электродов, с помощью формул: На основе этих значений могут быть вычислены электрические проводимости 1 и 2 каждого вещества. Если электрические проводимости 1 и 2 отличаются друг от друга, можно сделать вывод о том,что граница веществ находится в области между упомянутыми двумя парами электродов. Путем выполнения нового измерения посредством подъема или опускания трубки в вертикальном направлении, получают новую оценку высоты после упомянутых выше вычислений. Основной проблемой известного уровня техники является загрязнение датчиков и результирующая потеря функциональной надежности, а также медленное определение границы в результате повторяемых измерений. При этом датчики могут некоторое время работать в исправном состоянии, однако их срок службы небольшой. Упомянутое загрязнение вызывает необходимость относительно частой чистки датчиков или измерительных электродов, а это означает, что с точки зрения технологического процесса необходима реализация системы автоматической очистки, или, альтернативно, обслуживающий персонал должен регулярно вручную чистить или обслуживать устройство, что приводит в результате к дополнительным простоям при использовании устройства. Сущность изобретения В настоящем изобретении описан способ обнаружения местоположения границы или границ веществ, заключенных в объеме, включающем по меньшей мере одно вещество, при этом по меньшей мере часть упомянутого объема представляет собой жидкое вещество, с использованием набора зондов, включающего по меньшей мере один зонд, причем в упомянутом способе размещают набор зондов, включающий по меньшей мере одну пару электродов, в исследуемом объеме; подают ток или напряжение по меньшей мере на одну пару электродов и измеряют ток или напряжение по меньшей мере на одной паре электродов,используют геометрию измерений, представляющую схему, используемую при вычислении, а также выбирают алгоритм вычисления, необходимый в упомянутом вычислении. Отличительные признаки упомянутого способа включают размещение по меньшей мере трех электродов из упомянутого набора зондов в упомянутом исследуемом объеме в виде узла, существенно отличающегося от прямой линии, при этом все электроды из упомянутого набора зондов расположены только в объеме жидкого вещества; вычисление распределения электрической проводимости в упомянутом исследуемом объеме на основе результатов упомянутого измерения и заключение, на основе упомянутого распределения электрической проводимости, о местоположении по меньшей мере одной границы веществ в упомянутом исследуемом объеме. В одном из вариантов осуществления настоящего изобретения упомянутый шаг подачи питания и измерения выполняют с использованием электроимпедансной томографии (EIT) или электрорезистивной томографии (ERT). В одном из вариантов осуществления настоящего изобретения упомянутые электроды размещают по меньшей мере на одном зонде из упомянутого набора зондов таким образом, что векторы между упо-2 022686 мянутыми электродами охватывают трехмерное подпространство. В одном из вариантов осуществления настоящего изобретения упомянутые электроды размещают по меньшей мере на двух отдельных зондах, при этом упомянутые электроды на каждом зонде размещают по существу на прямой линии. В одном из вариантов осуществления настоящего изобретения используют 1Dспособ решения стандартной задачи обратного преобразования в упомянутом вычислении для нахождения плоских профилей упомянутых границ. В одном из вариантов осуществления настоящего изобретения определяют функцию измеренных значений напряжения или тока для требуемых числовых значений, представляющих упомянутую границу, с помощью методов машинного обучения. В одном из вариантов осуществления настоящего изобретения используют результаты, полученные на основе моделирования, в качестве обучающего материала для упомянутых методов машинного обучения. В одном из вариантов осуществления настоящего изобретения применяемый метод машинного обучения представляет собой MLP-сеть (Multi-Layer Perceptron, многоуровневый перцептрон). В одном из вариантов осуществления настоящего изобретения упомянутую MLP-сеть обучают с использованием алгоритма Левенберга-Марквардта. В одном из вариантов осуществления настоящего изобретения загрязнение электродов контролируют с помощью оценки контактных импедансов между каждым электродом и окружающим веществом. В соответствии со вторым аспектом настоящего изобретения, его идея включает также систему для обнаружения местоположения границы или границ веществ, заключенных в объеме, включающем по меньшей мере одно вещество, при этом по меньшей мере часть упомянутого объема представляет собой жидкое вещество, с использованием набора зондов, включающего по меньшей мере один зонд, причем упомянутая система включает: набор зондов, включающий по меньшей мере одну пару электродов, размещаемых в исследуемом объеме; средства подачи питания для подачи тока или напряжения по меньшей мере на одну пару электродов и средства измерения для измерения тока или напряжения по меньшей мере на одной паре электродов, а также процессор, использующий в упомянутом вычислении геометрию измерений, представляющую упомянутую схему, и выбранный алгоритм вычисления, необходимый в упомянутом вычислении. Отличительные признаки упомянутой системы следующие: по меньшей мере три электрода из упомянутого набора зондов, размещенные в упомянутом исследуемом объеме в виде узла, существенно отличающегося от прямой линии, при этом все электроды из упомянутого набора зондов расположены только в объеме жидкого вещества; упомянутый процессор служит для вычисления распределения электрической проводимости в упомянутом исследуемом объеме на основе результатов упомянутого измерения и упомянутый процессор служит для заключения о местоположении упомянутой по меньшей мере одной возможной границы веществ в упомянутом исследуемом объеме на основе упомянутого распределения электрических проводимостей и информации о местоположении упомянутых электродов. В одном из вариантов осуществления настоящего изобретения упомянутые средства подачи питания и измерения сконфигурированы для выполнения упомянутых шагов подачи питания и измерения с использованием электроимпедансной томографии (EIT) или электрорезистивной томографии (ERT). В одном из вариантов осуществления настоящего изобретения упомянутые электроды размещены по меньшей мере на одном зонде из упомянутого набора зондов таким образом, что векторы между упомянутыми электродами охватывают трехмерное подпространство. В одном из вариантов осуществления настоящего изобретения упомянутые электроды размещены по меньшей мере на двух отдельных зондах, при этом упомянутые электроды на каждом зонде размещены по существу на прямой линии. В одном из вариантов осуществления настоящего изобретения упомянутый процессор выполнен с возможностью использования 1Dспособа решения стандартной задачи обратного преобразования в упомянутом вычислении для нахождения плоских профилей упомянутых границ. В одном из вариантов осуществления настоящего изобретения упомянутый процессор выполнен с возможностью определения функции измеренных значений напряжения или тока для требуемых числовых значений, представляющих упомянутую границу, с помощью методов машинного обучения. В одном из вариантов осуществления настоящего изобретения упомянутый процессор выполнен с возможностью использования результатов, полученных на основе моделирования, в качестве обучающего материала для упомянутых методов машинного обучения. В одном из вариантов осуществления настоящего изобретения применяемый метод машинного обучения представляет собой MLP-сеть (многоуровневый перцептрон). В одном из вариантов осуществления настоящего изобретения упомянутую MLP-сеть обучают с использованием алгоритма Левенберга-Марквардта. В одном из вариантов осуществления настоящего изобретения упомянутые средства измерения выполнены с возможностью оценки контактных импедансов между каждым электродом и окружающим веществом. В соответствии с третьим аспектом настоящего изобретения его идея включает также компьютерную программу, включающую программный код, который при его исполнении в устройстве обработки данных сконфигурирован для управления шагами описанного выше способа, которые можно выполнять в процессоре или ином вычислительном устройстве. Преимущество настоящего изобретения заключается в том, что узел электродов измерительной системы не обязательно должен быть расположен в области осадка в исследуемом объеме, включающем осадок, который включает твердое вещество и жидкость. Кроме того, упомянутая граница (или границы) может быть найдена с использованием только одной измерительной схемы без необходимости перемещения электродов из одного места в другое. Краткое описание чертежей На фиг. 1 представлен пример дискретного разбиения, то есть сетки вычислений, для Т-образного зонда при использовании программного обеспечения Netgen. На фиг. 2 представлены три смоделированных профиля проводимости и профили проводимости,оцененные из них с помощью 1Dспособа. На фиг. 3 представлен пример так называемой MLP-сети (многоуровневого перцептрона). На фиг. 4 представлен пример зонда, используемого в настоящем изобретении, в котором электроды размещены в виде Т-образного узла. На фиг. 5 а представлен пример контейнера, представляющего собой применение настоящего изобретения, в котором были осаждены слои вещества и в котором границы измеряют с помощью Lобразного зона. На фиг. 5b представлено применение, аналогичное фиг. 5 а, в котором измерительный инструмент включает два отдельных зонда в виде рядом размещенных стержней. Подробное описание изобретение В настоящем изобретении описан новый тип измерительного зонда на основе измерений датчика проводимости для определения границ между двумя веществами. В упомянутом способе используются также современные методы обработки данных и вычислений. В способе используются EIT-измерения,обычно выполняемые в исследуемом объеме. Поскольку создание полного распределения проводимости является вычислительно очень сложным, в настоящем изобретении использованы методы машинного обучения. В частности, настоящее изобретение допускает использование узла электродов, который не требует его размещения внутри твердого вещества в контейнере с твердым осадком на дне. Другими словами, упомянутый зонд может быть использован для нахождения распределений проводимости также и в других областях, помимо области между измерительными электродами. Основная идея настоящего изобретения включает использование измерений на основе электроимпедансной томографии, при этом могут использоваться различные проводимости по разным сторонам от границы двух веществ или, в более общем случае, когда состав исследуемого вещества изменяется в зависимости от трехмерного местоположения. Именно вследствие упомянутых различий в свойствах веществ могут присутствовать упомянутые границы. В местоположениях внутри объема вещества, где свойства вещества изменяются более интенсивно, чем обычно, могут также наблюдаться более интенсивные изменения электрических свойств, например, электрической проводимости как функции местоположения. Чтобы упомянутые границы могли появиться, а также наблюдаться, в смеси различных веществ должны присутствовать сегрегация, осадок или иная неоднородность. В этом случае, например,вещества, имеющие различные веса, могут быть отделены друг от друга так, что может наблюдаться более интенсивное изменение, по сравнению со средним, электрической проводимости, характеристического импеданса или другого измеряемого свойства в области границы этих веществ. Так называемые контактные импедансы между каждым электродом и веществом могут также учитываться в упомянутом вычислении, при этом они, как правило, означают дополнительное электрическое сопротивление вследствие загрязнения вокруг электрода или неидеальных условий контакта (между электродом и окружающей средой). В результате этого также происходит дополнительное падение напряжения. В этом случае можно утверждать, что напряжение, измеряемое парой электродов, представляет собой функцию от подаваемого электрического тока, распределения проводимости на пути этого электрического тока и контактного импеданса между электродами и окружающим веществом. В такой ситуации можно продолжать измерения обычным образом, даже если электроды немного загрязнены(обычно на их поверхности при использовании появляется слой сернокислого кальция). С другой стороны, если количество загрязнителя превышает определенный предел, это может быть отмечено, и в этой ситуации, например, может выдаваться сигнал предупреждения. За счет вычисления контактного импеданса необходимость технического обслуживания узла датчиков также снижается, что еще больше уменьшает стоимость повседневного использования. Расстояние между электродами может выбираться свободно в соответствии с каждым применением. На него также влияют размеры исследуемого объема вещества. Количество применяемых электродов(расположенных на одном или более зондах) обычно равно по меньшей мере трем. Поскольку упомянутые токи и напряжения известны после упомянутого EIT-измерения, задачей является определение внутреннего распределения электрической проводимости в исследуемом объеме вещества. Задача подобного типа представляет собой так называемую задачу обратного преобразования,которая характеризуется тем, что является некорректно поставленной, то есть решение задачи не является однозначным или не существует. Противоположной для задачи обратного преобразования является так называемая задача прямого преобразования, которая в данном варианте осуществления настоящего изобретения заключалась бы в определении напряжений электродов на основе известных подаваемых токов и распределения электрических проводимостей. В связи с этим, может применяться так называемая полная модель электрода, которая описана, например, в документе Cheng и др. "Модели электродов для компьютерной томографии с использованием электрического тока" IEEE Transactions on BiomedicalEngineering, 36:918-924, 1989; и Somersalo и др. "Существование и уникальность моделей электродов для компьютерной томографии с использованием электрического тока" SIAM Journal on Applied Mathematics,52:1023-1040, 1992. В задаче прямого преобразования, в свою очередь, используют метод конечных элементов, который описан, например, в документе Vauhkonen и др. "Регуляризация Тихонова и априорная информация в электроимпедансной томографии", IEEE Transactions on Biomedical Engineering, 45:486493, 1998. Задача обратного преобразования включает рассмотрение регуляризованной задачи минимизации в виде: где- неизвестное распределение проводимостей, z - эффективные контактные импедансы между электродами и окружающим веществом, Umeas - напряжения, измеренные на электродах, U(,z) - напряжение, вычисленное, например, с помощью метода конечных элементов, связанного с задачей прямого преобразования, L1,2 - матрицы регуляризации, 1, 2 -параметры регуляризации, аи- предыдущие значения проводимости и контактного импеданса, соответственно. Оценки распределения проводимости и контактных импедансов могут итеративно вычисляться, например, с помощью метода Гаусса-Ньютона. В связи с этим, дополнительно применяют регуляризацию Тихонова, которая описана в упомянутой выше статье Vauhkonen. В способе настоящего изобретения плоские профили упомянутых границ могут быть оценены, например, с помощью так называемого 1Dспособа. Чтобы иметь возможность использовать технологиюEIT для оценки границы, для вычислений сначала должна быть определена геометрия измерений. Это включает определение геометрии зонда и геометрии электродов, размещенных на его поверхности, так,чтобы обеспечить возможность формирования сетки вычислений для упомянутого метода конечных элементов. Часто объект (например, загуститель), включающий упомянутую границу, является настолько большим, что дискретно разбиваемая область вычислений может быть ограничена окрестностью зонда,достаточно удаленной от электродов. Когда упомянутое позиционирование геометрии измерений завершено, геометрия может быть дискретно разбита как имеющая конечную размерность. Это может быть выполнено с помощью существующих программ, например, программы Netgen. Пример подобного дискретного разбиения, то есть вычислительной сетки, для Т-образного зонда представлен на фиг. 1. Способ, основанный на импедансной томографии и предназначенный для нахождения упомянутых границ на основе данных тока-напряжения, называют одномерным -способом, при этом он соответствует тем же основным принципам, что и упомянутое выше решение, полученное с использованием регуляризации Тихонова. Оценки распределения проводимости и контактных импедансов могут быть вычислены итеративно с помощью упомянутого метода Гаусса-Ньютона. На шаге "i + 1" итерации, параметрi+1 =[i+1, zi+1]может быть выражен соотношением: где ki - длина шага. При этом направление шага j задается формулой: где Ji = [J,i, Jz,j] представляет собой матрицу Якоби, вычисленную для проводимости и контактных импедансов, L представляет собой матрицу регуляризации, а= (, z) представляет собой начальное приближение проводимости и контактных импедансов. Матрица регуляризации для параметра i = [, z] может быть построена следующим образом: где L1 и L2- матрицы регуляризации для распределения проводимости и контактных импедансов, 1 и 2 - соответствующие параметры регуляризации. Если предположить, что распределение проводимости изменяется только в направлении глубины объекта, то задача сводится к одномерной задаче обратного преобразования, в которой находят изменения проводимости только для одной размерности. 1Dспособ может быть кратко описан следующим образом: 1. Решение задачи обратного преобразования вычисляют в одномерной дискретной сетке, в которой каждая точка соответствует отдельному значению проводимости на конкретной глубине. Полученное решение интерполируют в реальную сетку 3D-вычислений для вычисления значений напряжений (величина U(i) в уравнении (4. 2. Столбцы матрицы Якоби, вычисленные для проводимости в упомянутой сетке 3D-вычислений и соответствующие упомянутым выше высотам, суммируют. Таким образом, формируют новую матрицу Якоби, в которой количество столбцов соответствует высотам дискретно разбитой области вычислений. Элементы упомянутой матрицы Якоби для контактного импеданса добавляют к финальной матрице Якоби. 3. Априорно предполагают, что распределение проводимости и эффективные контактные импедансы являются гладкими функциями, то есть значения для физически смежных точек и смежных электродов не изменяются в широких пределах. Таким образом, матрицы регуляризации для проводимости и контактных импедансов представляют собой дифференциальные матрицы. В упомянутой регуляризации может также использоваться другой подход. Выше представлен способ определения абсолютных значений одномерного распределения проводимости. Как известно, то же может выполняться для изменений проводимости в объекте (дифференциальной функции). Далее рассмотрено определение параметров профиля границы на основе распределения проводимости, полученного с помощью 1Dспособа. В результате применения 1Dспособа получают одномерное распределение проводимости, (s),как функции глубины s. В этом распределении, как правило, интересуют проводимости на дне и на поверхности, ширина области изменения проводимости, то есть переходная область, и глубина границы. Проводимость верхней поверхности обозначают 0, проводимость нижней поверхности - 1, глубину границы -D, а ширину переходной области - Т. Далее продемонстрирован один из способов формирования параметров D, Т, 0 и 1 на основе решения, полученного как обратное преобразование (s). Для вычисления глубины границы D смежные значения (s) делят на соответствующие расстоянияs. Это дает аппроксимацию производной (s) где kIN=1,2,3N-1 представляет собой номер отдельной точки на дискретно разбитой координатной оси в направлении глубины. Это позволяет оценить D как максимум абсолютных значений упомянутых величин Для вычисления проводимостей сверху и снизу 0 и 1 определяют минимум min и максимум max распределения проводимости (s). Если-заранее заданное значение отклонения, а I = IN UN, то подмножества номеров минимума и максимума следующие: С использованием этих подмножеств, предполагая, что 10, оценки проводимостей на верхней и нижней поверхности могут быть вычислены путем усреднения значений множеств: где Nmax и Nmin - число элементов множеств Imax и Imin. Если 10, при вычислении их меняют местами. Ширина переходной области Т может быть оценена с использованием приведенных выше подмножеств Imin и Imax. Если 10, а Т 0 и T1 заданы уравнениями то в результате ТT1-T0. ЕСЛИ 10, при вычислении их меняют местами. Далее описаны моделирование одномерных оценок, осуществляемых с помощью 1Dспособа, и вычисленные параметры границы. Моделирование выполнялось для геометрии, аналогичной показанной на фиг. 1. Граница, включающая изменение проводимости, расположена в цилиндрическом объекте с диаметром 400 мм и высотой 600 мм. В объект сверху вводят Т-образный датчик для EIT-измерений, оснащенный 18 полосковыми электродами, 10 из которых расположены в вертикальной секции, а оставшиеся 8 - в горизонтальной секции. На основе заданной выше геометрии была сформирована сетка M1 моделирования для моделирования, при этом сетка разделена на 31845 дискретных точек. Для 1Dспособа была подготовлена вычислительная сетка М 2, состоящая из 14562 дискретных точек. Также, для 1Dспособа была сформирована одномерная сетка М 3 в направлении глубины, в которой была создана 31 точка на расстоянии 20 мм друг от друга. Для моделирования в сетке M1 были подготовлены различные профили границ с помощью формулы где =(s) - проводимость на глубине s, 0 и 1 - проводимости верхней и нижней стороны, D - глубина границы, Т - ширина переходной области, s - глубина, и а - параметр, представляющей форму кривой. Использованные значения параметров 0, 1, D и Т представлены в таблице ниже. Значение параметра а было равно 7. При этом были сформированы 30 различных подаваемых токов между электродами. В соответствии с рассматриваемыми профилями границ и подаваемыми токами были вычислены напряжения Usim с помощью решения задачи прямого преобразования, выражающей разности потенциалов соседних электродов для каждого подаваемого тока. К полученным в результате моделирования напряжениям был добавлен Гауссовый шум - 1% от каждого соответствующего значения. Похожие значения контактных импедансов, используемые в моделируемых напряжениях, были заданы для "пачек" из 45 электродов, при этом значение для каждой пачки было взято из интервала случайных значений с равномерным распределением [0,3 Оммм 2, 1,8 Оммм 2]. В соответствии с напряжениями Usim были найдены профили границ с использованием описанного выше 1Dспособа как решение задачи обратного преобразования. Вычисление было выполнено в сетках М 2 и М 3. Параметры задачи обратного преобразования были заданы следующим образом: среднее значение профиля границы, моделируемого для всех точек сетки, было установлено равным предыдущему значениюпроводимости, среднее значение моделируемых значений контактного импеданса было установлено равным предыдущему значению контактного импеданса z, соответственно, значение 5 было выбрано в качестве параметра 1 регуляризации, а значение 0,5 было выбрано в качестве параметра 2. Параметры границы были вычислены из упомянутого оцененного профиля границы, описанного выше. На фиг. 2 показано визуальное представление правильных профилей границ и оцененных профилей границ. В приведенной ниже таблице представлены параметры правильных границ и оцененных границ,то есть значения параметров D, Т, 1 и 0 смоделированного профиля проводимости и оценки, вычисленные на основе профиля проводимости, оценка которого была выполнена с помощью 1Dспособа. Альтернативно, вместо 1Dспособа, в одном из вариантов осуществления настоящего изобретения функция измеренных значений напряжения или тока для требуемых числовых значений, представляющих границу, может быть определена методами машинного обучения. Поскольку вычисления, применяемые в 1Dспособе являются, в общем случае, ресурсоемкими,для него необходим относительно мощный и производительный вычислительный блок. В качестве одного из примеров настоящего изобретения методы машинного обучения могут использоваться для аппроксимирования результатов 1Dспособа с достаточной для практических применений точностью. В этом случае для реализации варианта осуществления настоящего изобретения, работающего в оперативном режиме, достаточно простого вычислительного блока (например, цифрового сигнального процессора с ограниченным объемом доступной памяти). Для методов машинного обучения необходим конкретный обучающий материал, который в случае настоящего изобретения получен из приведенных выше результатов моделирования. Входные данные, то есть независимые переменные, в модели обучения включают смоделированные напряжения Usim, тогда как оцениваемые величины 0, 1, D и T заданы как выходные данные, то есть зависимые переменные,этой модели. Методы машинного обучения направлены на нахождение правил для определения функции какихлибо входных данных для некоторого пространства (четырехмерного в данном случае), соответствующего выходным данным таким образом, чтобы входные данные обучающего материала представляли собой достаточно точную функцию соответствующих требуемых выходных данных обучающего материала. После нахождения этой функции она может быть использована для оценки выходных данных для новых недавно измеренных входных данных. В одном из вариантов осуществления настоящего изобретения в качестве метода машинного обучения выбирают так называемый многослойный перцептрон, или MLP-сеть. Он ограничен двухслойной сетью, определяющей функцию входных данных xi, для выходных данных yi в соответствии с фиг. 3. На чертеже узлы, обозначенные окружностью, представляют собой так называемые перцептроны Розенблатта ("Перцептрон: вероятностная модель хранения и организации информации в мозгу, Розенблатт,Psychological Review, 65 (6): 386-408, 1958), каждый из которых вычисляет конкретным образом взвешенную сумму входных данных, соответствующих входящим стрелкам и в конечном итоге, возможно,ослабляет отклик путем применения так называемой конкретной сигмоидальной функции. В связи с этим, ослабление используют только в первом слое, показанном слева на чертеже. Таким образом, правила, исполняемые перцептроном MLP, могут быть выражены как функция Где= [у 1yn] - выходные данные модели для входных данных метрах сети, то есть весовых матрицах= [x1xn] при конкретных пара и так называемых векторов не является обычной функцией нескольких переменных, а применяется к вектору ментно, то есть= [z1zk]T поэле где функцию гиперболического тангенса tanh(zi) = (exp(2zi)-1)/(exp(2zi)+1) применяют для ослабления. Определение весовых матриц и а также векторов и сдвига на основе обучающего материала называют обучением MLP-сети. Обычно упомянутый метод обучения направлен на изменение значений этих параметров таким образом, чтобы входные данные обучающего материала были настолько точной функцией, насколько это возможно, для соответствующих требуемых откликов обучающего материала. В одном из вариантов осуществления настоящего изобретения такой шаг обучения выполняют с использованием так называемого алгоритма Левенберга-Марквардта (Hagan, Menhaj. "Обучение нейронных сетей прямого распространения с использованием алгоритма Марквардта", IEEE Transactionson Neural Networks, 5(6): 989-993, 1994). В одном из вариантов настоящего изобретения упомянутое обучение может обеспечиваться путем вычисления на основе входных данных Usim определенного числа так называемых главных компонент(например, Joliffe, "Анализ главных компонент", Springer, 2. edition, 2002), которое меньше, чем количество исходных измерений напряжения, и использования этих полученных значений как входных данных для обучаемой сети. Путем хранения преобразования измерений напряжения на главных компонентах, та же самая функция может быть также определена для новых измеряемых, в темпе поступления информации, векторов напряжения, перед их вводом в MLP-сеть. В одном из вариантов осуществления настоящего изобретения вместо одной MLP-сети применяют группу, сформированную из нескольких сетей. Известно, что это позволяет снизить разброс из-за неопределенности обучения и, следовательно, повысить способность к обобщению результирующего алгоритма оценки (например, Dietterich, "Методы ансамблей в машинном обучении" под редакцией Kittler иRoli: "Системы множественной классификации", LNCS 1857, 1-15, Springer, 2000). Обучение MLP-сети является вычислительно сложным, однако может выполняться не в темпе поступления информации перед или в связи с введением измерительного инструмента, на основе либо моделирования, либо реальных измерений. В этом случае необходимо лишь загрузить на инструмент, выполняющий фактические измерения, очень простую программу, которая реализует функцию (15), весовые матрицы и а также векторы и сдвига. При применении преобразования главных компонент необходима также программа, которая выполняет упомянутое преобразование, а также матрица преобразования. В случае применения группы дополнительно необходима программа, которая реализует группу, а также весовые матрицы и векторы сдвига в таком количестве, сколько элементов присутствует в упомянутой группе. Что касается вычислений, формирование оценок на основе новых измерений на-8 022686 пряжения является простым. В частности, функция гиперболического тангенса может быть представлена в виде так называемой таблицы поиска, в этом случае устройство практически не должно поддерживать других вычислений кроме сложения и умножения, а также округления и поиска по таблице. Выходные данные модели, полученные с помощью методов машинного обучения, могут включать также в дополнение к параметрам 0, 1, D и T контактные импедансы. В этом случае модель может также применяться, помимо оценки границы, для контроля загрязнения электродов. Далее рассмотрены предпочтительные варианты позиционирования узла электродов в устройстве,описанном в настоящем изобретении. Если вместо позиционирования на прямой в соответствии с методами известного уровня техники применяют по меньшей мере три электрода, таким образом, что позиционирование узла электродов отличается от прямой линии, то можно избежать недостатков, присущих известному уровню техники. Если электроды располагают, например, на каждом конце и/или угле Т-, Z-,F-, L-или Y-образного узла, то можно размещать упомянутый узел, например, полностью в воде или другой жидкости, без погружения в твердое или осажденное вещество, при этом предоставляя возможность определения высоты или местоположения возможной или по меньшей мере одной границы веществ, находящейся под упомянутым узлом и измеренной относительно требуемого опорного уровня. Очевидно,имеются альтернативные схемы расположения электродов; они могут быть расположены, например, в виде зигзагообразной последовательности или иным образом отличаться от прямой линии. Электроды могут располагаться на нескольких отдельных зондах таким образом, что каждый зонд включает по меньшей мере один электрод. Однако в этом случае расположение электродов узла, образованного одним или более зондами, отличается от прямой линии, при этом в лучшем случае может быть исключена необходимость перемещения электродов при обнаружении границ. Основная идея способа и устройства настоящего изобретения, таким образом, заключается в том, что набор, образованный электродами, располагают по меньшей мере в двух различных измерениях, то есть в конфигурации, существенно отличающейся от одномерной прямой линии. В дополнение при использовании нескольких прямых зондов основное отличие по сравнению с известным уровнем техники заключается в том, что пары электродов,используемые для подачи сигналов и измерений, формируют между различными желаемыми зондами. Одной из альтернатив в настоящем изобретении является применение двух отдельных узлов датчиков в форме стержней, расположенных в вертикальном направлении на подходящем расстоянии друг от друга. Оба узла датчиков с электродами могут полностью находиться в воде или другой жидкости, без касания осадка, включающего твердое вещество. В одном из вариантов осуществления настоящего изобретения расстояние между двумя электродами в одном узле в форме стержня имеет тот же порядок, что и взаимное расстояние по горизонтали между двумя узлами в форме стержней. В другом примере несколько электродов могут быть расположены на одном зонде в требуемом количестве. Напряжения, измеряемые двумя узлами (зондами), зависят также от состава веществ под узлом, что не воспринимается одним узлом в форме стержня из двух или более электродов. При измерении испытательный ток в данном случае протекает также вне области между зондами, заданной прямыми линиями, то есть через область осадка в предыдущем примере. Таким образом, можно видеть, что электрическое поле имеется по обе стороны от границы между жидкостью и твердым веществом, при этом измерение напряжений, выполняемое с помощью зонда (или зондов) посредством описанного выше моделирования и выполнения обратного преобразования позволяет выяснить возможное наличие и местоположение границ. Идея настоящего изобретения может, например, быть расширена для исследования объема, включающего несколько осажденных веществ, причем посредством способа настоящего изобретения можно находить несколько различных границ между различными веществами. При этом зонды в случае упомянутого выше контейнера могут размещаться только в области жидкости, однако на практике толщина слоя каждого вещества имеет определенный верхний предел, если с помощью этого способа необходимо также определять самую нижнюю границу. В одном из вариантов осуществления настоящего изобретения упомянутый зонд или зонды могут перемещаться в области исследуемого объема, при этом EIT-измерения и вычисления могут повторяться после изменения местоположения. Таким образом, может быть получена более точная информация о трехмерном местоположении границы в случае, если толщина осажденных слоев изменяется, или если границы могут присутствовать в неограниченном количестве направлений (помимо горизонтального). Наконец, устройство обеспечивает возможность формирования точной трехмерной карты или схемы, на которой видны различные вещества и границы между ними, например, посредством различных цветов на экране компьютера пользователя. На фиг. 4 показан один из типовых примеров зонда, применяемого в настоящем изобретении. Зонд 40 в данном примере имеет Т-образную форму, которая обеспечивает предпочтительную конфигурацию узла, отличающуюся от прямой линии, и является при этом простой. Электроды устанавливают последовательно в вертикальной секции (одном из плечей) узла. В данном примере их число равно восьми, однако может использоваться другое количество электродов. В данном примере электроды размещают с равномерным интервалом, однако они могут быть размещены с изменяющимся взаимным расстоянием. Четыре электрода располагают на двух оставшихся концах каждого ответвления Т-образного зонда данного примера. Другими словами, в данном примере имеется 16 пронумерованных электродов, обозначенных 411n. Фиг. 5 а, в свою очередь, описывает измерительную схему с примером контейнера 50, в который и из которого подают смесь веществ, причем твердое вещество осаждается в жидкости. Контейнер может представлять собой любое применение с потоковой транспортировкой веществ, в котором текучее вещество направляют, или оно перетекает, из одного контейнера в другой, или его транспортируют, например, через трубопровод. На дне контейнера 50 в данном примере накопилось осажденное вещество, образованное на основе различных масс или других свойств компонентов упомянутой смести. Первое вещество 51 а, являясь самым тяжелым, было осаждено на дне, при этом толщина слоя этого вещества обозначена как h1, которая, очевидно, может быть различной в различных точках дна контейнера. Слой 51b второго вещества, как более легкого, отложился поверх слоя первого вещества, при этом высота его верхнего уровня относительно дна контейнера обозначена как h2 (которая также может изменяться в зависимости от координат на дне контейнера). Измерительный зонд 52, который в данном примере имеет L-образную форму, может быть введен внутрь контейнера 50. Для электродного узла возможна также другая форма, отличающаяся от прямой линии. В качестве примера, данный зонд имеет 8 + 8 электродов 511-52n, установленных на перпендикулярных ответвлениях тела зонда. В данном примере L-образный зонд может быть размещен полностью поверх осажденных слоев, чтобы таким образом исключить загрязнение электродов. Электродный узел может при этом перемещаться внутри контейнера таким образом, что местоположение зонда может свободно выбираться, при необходимости, в области контейнера, свободной от осадка. Управление устройством (его частями, осуществляющими подачу тока и измерения) и необходимая вычислительная логика могут быть реализованы, например, посредством отдельного или встроенного контроллера или компьютера, показанного на чертеже в данном примере как сервер 53. Осуществление описанных выше функций измерения управляется компьютерной программой, установленной на упомянутом компьютере, при этом процессор компьютера может обрабатывать требуемые вычислительные операции. С другой стороны, допустимо также размещение упомянутых частей устройства, предназначенных для подачи тока и измерений, необходимых для EIT- или ERT-измерений в отдельном блоке, не обязательно требующем отдельного монитора (как показано на чертеже). В данном случае полученные данные измерения могут быть переданы для обработки отдельным процессором, который может присутствовать в компьютере в качестве отдельного блока. В одном из вариантов осуществления настоящего изобретения возможно применение единого интегрированного контроллера, который управляет подачей, измерениями, а также выполняет вычисления,при этом монитор не является необходимым. Контроллер может управлять, например, гудком, обеспечивающим предупреждение в случае необходимости, пересылать данные измерений в виде требуемого сигнала для применения в другой системе или напрямую регулировать механизм исследуемого процесса или действенный сигнал в исследуемом процессе. В еще одном применении упомянутые части устройства, предназначенные для подачи питания, измерения и обработки данных, могут быть реализованы как отдельные и независимо управляемые блоки. Одной из альтернатив является объединение двух из перечисленных выше функциональностей и реализация третьей в отдельном блоке. При необходимости к требуемой части устройства могут быть подключены средства контроля, которые могут быть реализованы, например, в виде монитора, связанного с компьютером (как это показано на фиг. 5 а) и/или интегрального устройства отображения сигналов в инструменте подачи питания / измерения. Необходимые соединения между частями устройства, предназначенными для подачи тока, измерений, вычислительным блоком (процессором) 53, а также набором зондов 52 могут быть обеспечены с использованием известных средств проводного или беспроводного соединения, например, различных кабельных разводок, или удаленных соединений, например, через соединение Интернет. В результате вычисления, могут быть получены значения h1 и h2 в зависимости от местоположения, или, например,может быть получен более точный схематический план изменений свойства вещества и/или границ в двумерном виде в разрезе. Если, с другой стороны, применяют по меньшей мере четыре электрода, для их размещения, по существу, в трех размерностях, то есть так, чтобы векторы между ними охватывали базис трехмерного пространства, то появляется возможность, без перемещения узла, формировать действительно трехмерное представление измеряемых электрических свойств в пространстве, окружающем упомянутый набор электродов и возможные границы. Зонд, показанный на фиг. 5 а, может быть соответствующим образом адаптирован, например, путем добавления третьего ответвления, выходящего из угла буквы L перпендикулярно к обоим существующим ответвлениям. Фиг. 5b, в свою очередь, демонстрирует применение, в котором используют другой набор зондов. В остальном измерительная схема идентична фиг. 5 а. Вместо одного зонда могут быть применены два зонда 52 а и 52b рядом друг с другом. Первый зонд 52 а включает электроды 52a1, 52 а 2, , 52 а 8, а второй зонд,соответственно, электроды 52b1, 52b2, , 52b8. Количество электродов обозначено на чертеже индексамиm и n, при этом допускается использование любых чисел при условии, что mn. Контейнер 50 попрежнему выступает в роли объема для прохода смеси, образованной жидкостями и твердыми вещества- 10022686 ми, при этом на дне контейнера могут осаждаться вещества с различными массами в соответствующих слоях 51 а, 51b. Как и выше, задачей, соответственно, является нахождение h1 и h2, либо как информации о точном расстоянии от границы до требуемой точки отсчета, либо как расширенных данных о трехмерной границе, которые могут быть отображены в виде трехмерного представления содержимого исследуемого объема. Как утверждалось в связи с предыдущим чертежом, для формирования трехмерного представления необходим набор электродов, в котором векторы между электродами охватывают трехмерное (под)пространство. Например, два зонда, каждый из которых включает по два электрода, могут вместе охватывать трехмерное подпространство, если эти зонды расположены не параллельно друг другу. Процедура управляется компьютером 53, связанным с каждым из зондов 52 а-b. Упомянутый компьютер может представлять собой локальный контроллер, соединенный с устройством, или, например, отдельный сервер, соединенный линией передачи данных. Части устройства, предназначенные для подачи тока и измерения, могут, при необходимости, находиться в блоках, физически внешних по отношению к упомянутому процессору или компьютеру, осуществляющему упомянутые вычисления в соответствии с описанием фиг. 6 а. Два или более отдельных зондов могут располагаться на требуемом расстоянии друг от друга, при этом их позиции, взаимное местоположение или углы поворота зонда относительно других зондов или контейнера могут изменяться. В предпочтительном варианте осуществления настоящего изобретения,как правило, имеется 316 электродов. Идея настоящего изобретения применима к объемам, содержащим множество типов жидкостей,твердых веществ, эмульсий и смесей, которые могут представлять собой сосуды, контейнеры, трубопроводы, камеры или аналогичные емкости, в которых возможно смешивание или осаждение веществ, при этом электрические свойства различных веществ (например, электрические проводимости или емкостные свойства веществ) различны. При этом настоящее изобретение может быть применено, например, в измерениях при исследовании почвы (геологических исследованиях). Типовые примеры осуществления настоящего изобретения включают различные применения потоковой передачи и осаждения веществ, в которых имеет место отделение или выделение веществ или необходимо определять объемы, уровни поверхности или наличие требуемого вещества в конкретном производственном процессе. Настоящее изобретение не ограничено указанными выше примерами его осуществления; возможны множество изменений в пределах сущности настоящего изобретения, определяемого приложенной формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ обнаружения местоположения границы или границ веществ, заключенных в объеме,включающем по меньшей мере одно вещество, при этом по меньшей мере часть упомянутого объема представляет собой жидкое вещество, с использованием набора зондов, включающего по меньшей мере один зонд, причем упомянутый способ включает следующие шаги: введение набора зондов, включающего электроды, в исследуемый объем; подачу тока или напряжения на электроды и измерение тока или напряжения на электродах, а также обработку результатов измерений; отличающийся тем, что набор зондов содержит по меньшей мере три электрода, причем упомянутые по меньшей мере три электрода, по существу, не расположены вдоль прямой линии, при этом все электроды из упомянутого набора зондов расположены только в объеме жидкого вещества так, чтобы обеспечить возможность измерения тока или напряжения в области границы или границ веществ; причем упомянутый способ включает также следующие шаги: определение распределения электрической проводимости в упомянутом исследуемом объеме на основе результатов упомянутого измерения и определение на основе упомянутого распределения электрической проводимости и информации о местоположении электродов местоположения по меньшей мере одной границы веществ в упомянутом исследуемом объеме. 2. Способ по п.1, отличающийся тем, что он включает выполнение упомянутого шага подачи тока и измерения с использованием электроимпедансной томографии (EIT) или электрорезистивной томографии (ERT). 3. Способ по п.2, отличающийся тем, что он включает шаг размещения упомянутых электродов по меньшей мере на одном зонде из упомянутого набора зондов так, что векторы между упомянутыми электродами охватывают трехмерное подпространство. 4. Способ по п.2, отличающийся тем, что он включает шаг размещения упомянутых электродов по меньшей мере на двух отдельных зондах, при этом упомянутые электроды на каждом зонде размещают,по существу, на прямой линии. 5. Способ по п.2, отличающийся тем, что он включает шаг использования 1Dспособа решения стандартной задачи обратного преобразования в упомянутом вычислении для нахождения плоских профилей упомянутых границ. 6. Способ по п.2, отличающийся тем, что он включает шаг определения функции измеренных значений напряжения или тока для требуемых числовых значений, представляющих упомянутую границу, с помощью методов машинного обучения. 7. Способ по п.6, отличающийся тем, что он включает шаг использования результатов, полученных на основе моделирования, в качестве обучающего материала для упомянутых методов машинного обучения. 8. Способ по п.6, отличающийся тем, что упомянутый применяемый метод машинного обучения представляет собой MLP-сеть (многоуровневый перцептрон). 9. Способ по п.8, отличающийся тем, что упомянутую MLP-сеть обучают с использованием алгоритма Левенберга-Марквардта. 10. Способ по п.2, отличающийся тем, что он включает шаг контроля загрязнения упомянутых электродов с помощью оценки контактных импедансов между каждым электродом и окружающим веществом. 11. Система для обнаружения местоположения границы или границ веществ, заключенных в объеме, включающем по меньшей мере одно вещество, при этом по меньшей мере часть упомянутого объема представляет собой жидкое вещество, с использованием набора зондов, включающего по меньшей мере один зонд, при этом упомянутая система включает набор зондов (40, 52, 52 а, 52b), включающий электроды (41, 52), размещаемые в исследуемом объеме; средства (53) подачи питания для подачи тока или напряжения на электроды и средства (53) измерения для измерения тока или напряжения на электродах, а также процессор (53) для обработки результатов измерений; отличающаяся тем, что она также содержит по меньшей мере три электрода из упомянутого набора зондов (40, 52, 52 а, 62b), размещаемые в упомянутом исследуемом объеме в виде узла, причем упомянутые по меньшей мере три электрода, по существу, не расположены вдоль прямой линии, при этом все электроды из упомянутого набора зондов могут быть расположены только в объеме жидкого вещества так, чтобы обеспечить возможность измерения тока или напряжения в области границы или границ веществ; при этом упомянутый процессор (53) выполнен с возможностью определения распределения электрической проводимости в упомянутом исследуемом объеме на основе результатов упомянутого измерения и определения местоположения по меньшей мере одной возможной границы веществ в упомянутом исследуемом объеме на основе упомянутого распределения электрической проводимости и информации о местоположении упомянутых электродов. 12. Система по п.11, отличающаяся тем, что средства (53) подачи тока и измерения сконфигурированы для выполнения упомянутых шагов подачи питания и измерения с использованием электроимпедансной томографии (EIT) или электрорезистивной томографии (ERT). 13. Система по п.12, отличающаяся тем, что она также включает электроды (41i, 52i), размещенные по меньшей мере на одном зонде (40, 52, 52 а, 52b) из упомянутого набора зондов так, что векторы между упомянутыми электродами (41i, 52i) охватывают трехмерное подпространство. 14. Система по п.12, отличающаяся тем, что она также включает электроды (52ia,b), размещенные по меньшей мере на двух отдельных зондах (52 а, 52b), при этом упомянутые электроды на каждом зонде размещены, по существу, на прямой линии. 15. Система по п.12, отличающаяся тем, что упомянутый процессор (53) выполнен с возможностью использования 1Dспособа решения стандартной задачи обратного преобразования в упомянутом вычислении для нахождения плоских профилей упомянутых границ. 16. Система по п.12, отличающаяся тем, что упомянутый процессор (53) выполнен с возможностью определения функции измеренных значений напряжения или тока для требуемых числовых значений,представляющих упомянутую границу, с помощью методов машинного обучения. 17. Система по п.16, отличающаяся тем, что упомянутый процессор (53) выполнен с возможностью использования результатов, полученных на основе моделирования, в качестве обучающего материала для упомянутых методов машинного обучения. 18. Система по п.16, отличающаяся тем, что упомянутый применяемый метод машинного обучения представляет собой MLP-сеть (многоуровневый перцептрон). 19. Система по п.18, отличающаяся тем, что упомянутая MLP-сеть выполнена с возможностью обучения с использованием алгоритма Левенберга-Марквардта. 20. Система по п.12, отличающаяся тем, что она также включает упомянутые средства (53) измерения для контроля загрязнения упомянутых электродов путем оценки контактных импедансов между каждым из электродов (41i, 52i) и окружающим веществом.
МПК / Метки
МПК: G01V 3/08, G01F 23/26
Метки: определения, зонд, границ, веществами, между
Код ссылки
<a href="https://eas.patents.su/15-22686-zond-dlya-opredeleniya-granic-mezhdu-veshhestvami.html" rel="bookmark" title="База патентов Евразийского Союза">Зонд для определения границ между веществами</a>
Зонд для определения уровня контакта флюидов в пласте
Номер патента: 3378
Опубликовано: 24.04.2003
Авторы: Ван Вюнник Йоханнес Николас Мария, Шерпенисс Виллем
МПК: E21B 47/04
Метки: определения, зонд, флюидов, контакта, пласте, уровня
Формула / Реферат:
1. Зонд для определения уровня контакта флюидов в пласте, содержащий первый зонд давления, содержащий первый датчик давления, установленный в измерительной камере, одна стенка которой выполнена проницаемой для первой среды и непроницаемой для второй среды, при этом указанная стенка измерительной камеры прижата к стенке скважины в течение заранее определенного периода времени, когда первый датчик давления активирован, второй зонд давления,...
Измерительный зонд и способ измерения концентрации реагентов в газах и/или жидкостях
Номер патента: 3262
Опубликовано: 27.02.2003
Авторы: Бишофф Герлинде, Бишофф Роберт
МПК: G01N 27/12
Метки: жидкостях, способ, газах, концентрации, реагентов, зонд, измерительный, измерения
Формула / Реферат:
1. Измерительный зонд, содержащий активный чувствительный слой и пару электродов для обнаружения реагентов и их концентрации в газах и/или жидкостях, отличающийся тем, что активный чувствительный слой измерительного зонда (1) с наружной стороны снабжен покрывной пленкой (7) из жидкости. 2. Измерительный зонд по п.1, отличающийся тем, что покрывная пленка (7) состоит из воды. 3. Измерительный зонд по п.1 или 2, отличающийся тем, что покрывная...
Система и способ удаления пленки с внешних границ поверхностей плоских подложек
Номер патента: 11698
Опубликовано: 28.04.2009
Автор: Хинкл Джеймс Эрнст
МПК: H01L 23/58
Метки: внешних, поверхностей, система, удаления, границ, способ, плоских, подложек, пленки
Формула / Реферат:
1. Система удаления пленки с множества периферийных участков поверхности практически плоской подложки, содержащая установку подачи, установку вывода, транспортный механизм возвратно-поступательного движения, размещенный между установкой подачи и установкой вывода и сконфигурированный так, чтобы транспортировать подложку из первой конечной позиции рядом с установкой подачи и второй конечной позиции на расстоянии от установки подачи, причем первая...
Химерный олигонуклеотидный праймер для способа амплификации нуклеиновой кислоты; продукт для амплификации нуклеиновой кислоты;зонд для способа детекции нуклеиновой кислоты-мишени; материал с иммобилизованной амплифицированной нуклеиновой кислотой и способ его получения; способ определения нуклеотидной последовательности
Номер патента: 7414
Опубликовано: 27.10.2006
Авторы: Сагава Хироаки, Ямамото Дзунко, Уемори Такаси, Еноки Тацудзи, Асада Киезо, Мукаи Хироюки, Кобаяси Ейдзи, Като Икуносин, Томоно Дзун
МПК: C12Q 1/68, C12N 15/09
Метки: кислоты, детекции, химерный, праймер, нуклеиновой, олигонуклеотидный, способа, нуклеотидной, последовательности, способ, иммобилизованной, амплификации, получения, кислотой, определения, материал, амплифицированной, продукт, кислоты;зонд, кислоты-мишени
Формула / Реферат:
1. Зонд, гибридизующийся с фрагментом, амплифицированным с использованием химерного олигонуклеотидного праймера, выбранного из следующей группы: (a) химерный олигонуклеотидный праймер для детекции энтерогеморрагической Escherichia coli, имеющий нуклеотидную последовательность, выбранную из группы, состоящей из SEQ ID No 31-34, 47, 48, 51-53, 64-72, 84, 85, 113, 114, 130 и 131; (b) химерный олигонуклеотидный праймер для детекции вироида, имеющий...
Способ изменения наклонения и высоты орбиты космического летательного аппарата с использованием границ области малой устойчивости
Номер патента: 2665
Опубликовано: 29.08.2002
Автор: Белбруно Эдвард А.
МПК: B64G 1/10, G06F 17/00
Метки: наклонения, области, орбиты, изменения, космического, использованием, летательного, устойчивости, малой, высоты, способ, аппарата, границ
Формула / Реферат:
1. Способ изменения, по меньшей мере, наклонения и высоты космического летательного аппарата в зоне притяжения, по меньшей мере, двух небесных тел, включающий следующие независимые стадии: а) осуществление перехода летательного аппарата с его орбиты относительно первого небесного тела или с поверхности первого небесного тела до обеспечения слабого захвата в области слабой устойчивости (WSB) или на орбите в области (WSB), связанной с первым и...
Предыдущий патент: Усовершенствованный нагреватель для электрически нагреваемой системы генерирования аэрозоля
Следующий патент: Термообработанный стальной материал, способ его получения и базовый стальной материал для него
Случайный патент: Прочно насаженный топор или молоток