Система для маркировки участков железнодорожного пути и детектирования промаркированных указанной маркировкой участков пути в целях обслуживания железнодорожных путей
Формула / Реферат
1. Система для маркировки участков железнодорожного пути и детектирования промаркированных указанной маркировкой участков пути в целях обслуживания железнодорожных путей, в которой обеспечены средства для оптического обнаружения меток маркировки, отличающаяся тем, что содержит по меньшей мере один блок независимых (2) датчиков (I, II) для обнаружения меток (3) маркировки, располагаемых рядом с рельсом (1), причем датчики указанного блока измеряют бесконтактным образом, основываясь на различных принципах измерения, блок (2) содержит оптический датчик (I), имеющий спектрально-селективную чувствительность, и детектор (II) идентификации для индивидуальной идентификации меток (3) маркировки, каждая метка (3) маркировки выполнена в виде Г-образной или Т-образной угловой детали (4), первая вертикально ориентированная часть (41) которой выполнена съемно устанавливаемой на рельс (1), а вторая горизонтально ориентированная часть (42) содержит покрытие (5), излучающее в узкой спектральной полосе спектрально-селективного датчика (I), и идентификационную метку (6) для считывания детектором (II) идентификации, блок (2) независимых датчиков размещен на средстве (8), которое может перемещаться на путях таким образом, что независимые датчики (I, II) блока (2) сонаправлены, и при перемещении вместе с указанным средством (8) вдоль путей перемещаются параллельно рельсу (1) над метками (3) указанной маркировки.
2. Система по п.1, отличающаяся тем, что блок (2) независимых датчиков выполнен с возможностью поворота в вертикальной плоскости, поперечной рельсу (1).
3. Система по п.1, отличающаяся тем, что блок (2) датчиков выполнен с возможностью смещения поперечно рельсу (1) для того, чтобы приспосабливаться к железнодорожному габариту и расположению меток маркировки на рельсе (1).
4. Система по п.1, отличающаяся тем, что на средстве (8), которое может перемещаться на путях, обеспечен блок (2) датчиков для каждого рельса (1), при этом блоки (2) датчиков размещены противоположно друг другу в поперечном направлении по отношению к пути.
5. Система по п.1, отличающаяся тем, что метки (3) маркировки крепятся к рельсу (1) с помощью постоянного магнита (7).
6. Система по п.5, отличающаяся тем, что метки (3) маркировки крепятся на шейке рельса (1).
7. Система по п.5, отличающаяся тем, что метки (3) маркировки крепятся на губе желобчатого рельса (11).
8. Система по п.5, отличающаяся тем, что метки (3) маркировки размещены на контррельсе пути.
9. Система по п.1, отличающаяся тем, что покрытие, которое излучает свет в узкой спектральной полосе, является люминесцентным слоем (5).
10. Система по п.9, отличающаяся тем, что блок (2) датчиков содержит спектрально-селективный датчик (I) для люминесцентного света, который адаптирован под диапазон длин волн излучения люминесцентного слоя (5).
11. Система по п.1, отличающаяся тем, что идентификационная метка (6) метки (3) маркировки содержит чип RFID (6).
12. Система по п.11, отличающаяся тем, что детектор (II) идентификации блока (2) датчиков содержит радиоволновой преобразователь (II) для считывания чипа RFID (6).
13. Система по п.1, отличающаяся тем, что средство (8), которое может перемещаться на путях, для крепления блока (2) датчиков представляет собой обрабатывающее оборудование (8) из группы, содержащей рельсошлифовальные машины или шпалоподбивочные машины.
14. Система по п.1, отличающаяся тем, что средство (8), которое может перемещаться на путях, представляет собой измерительное транспортное средство.

Текст
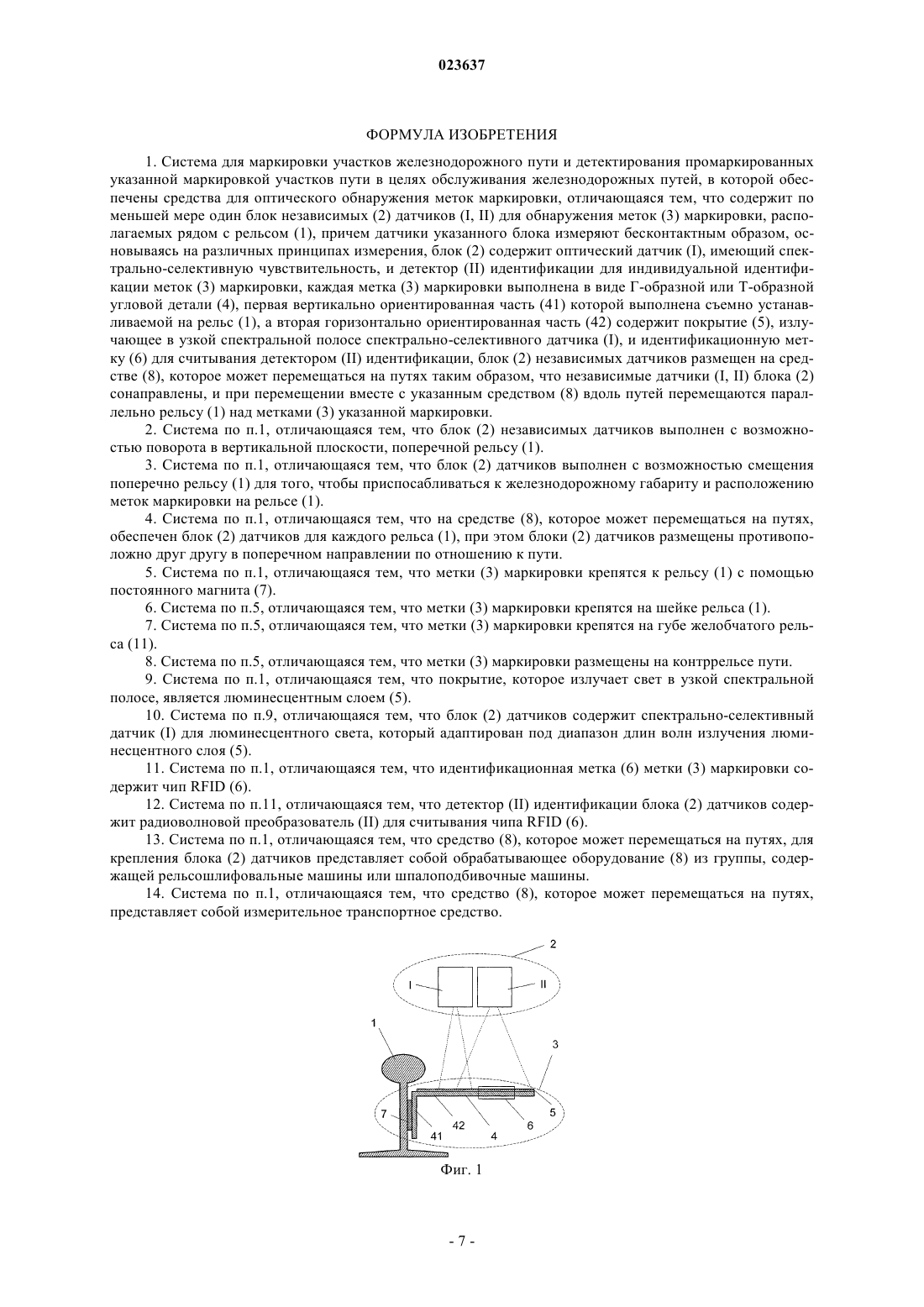
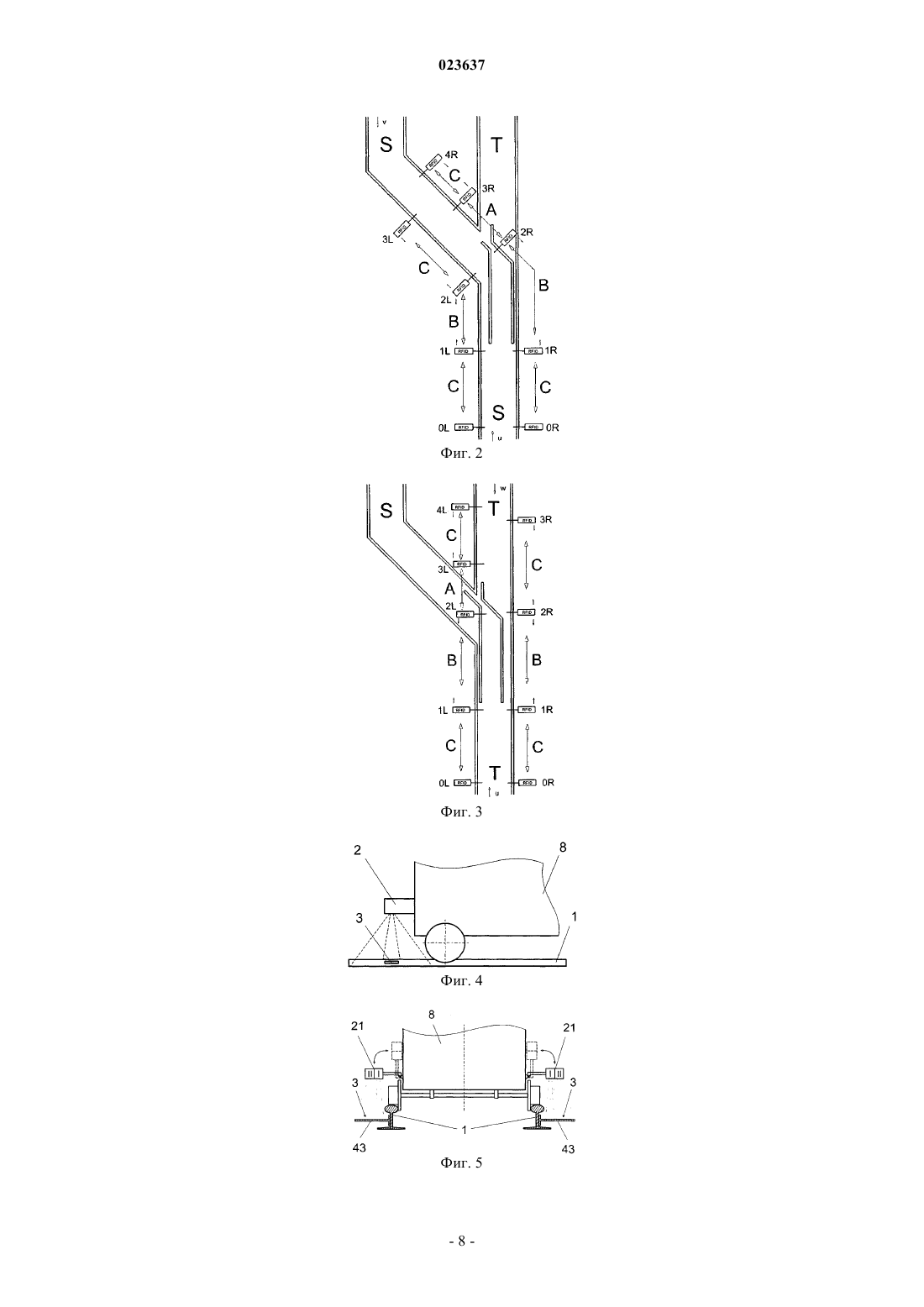
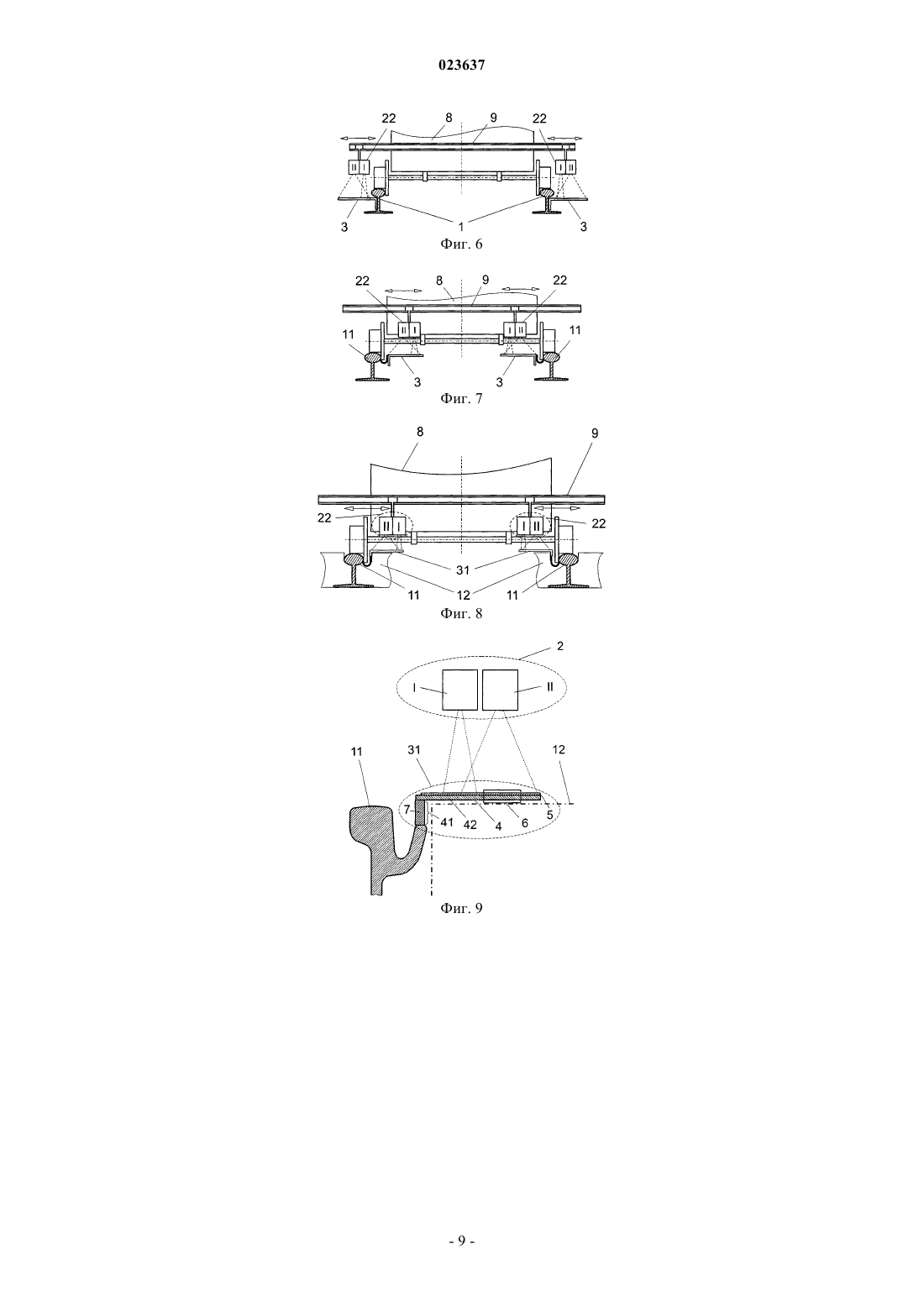
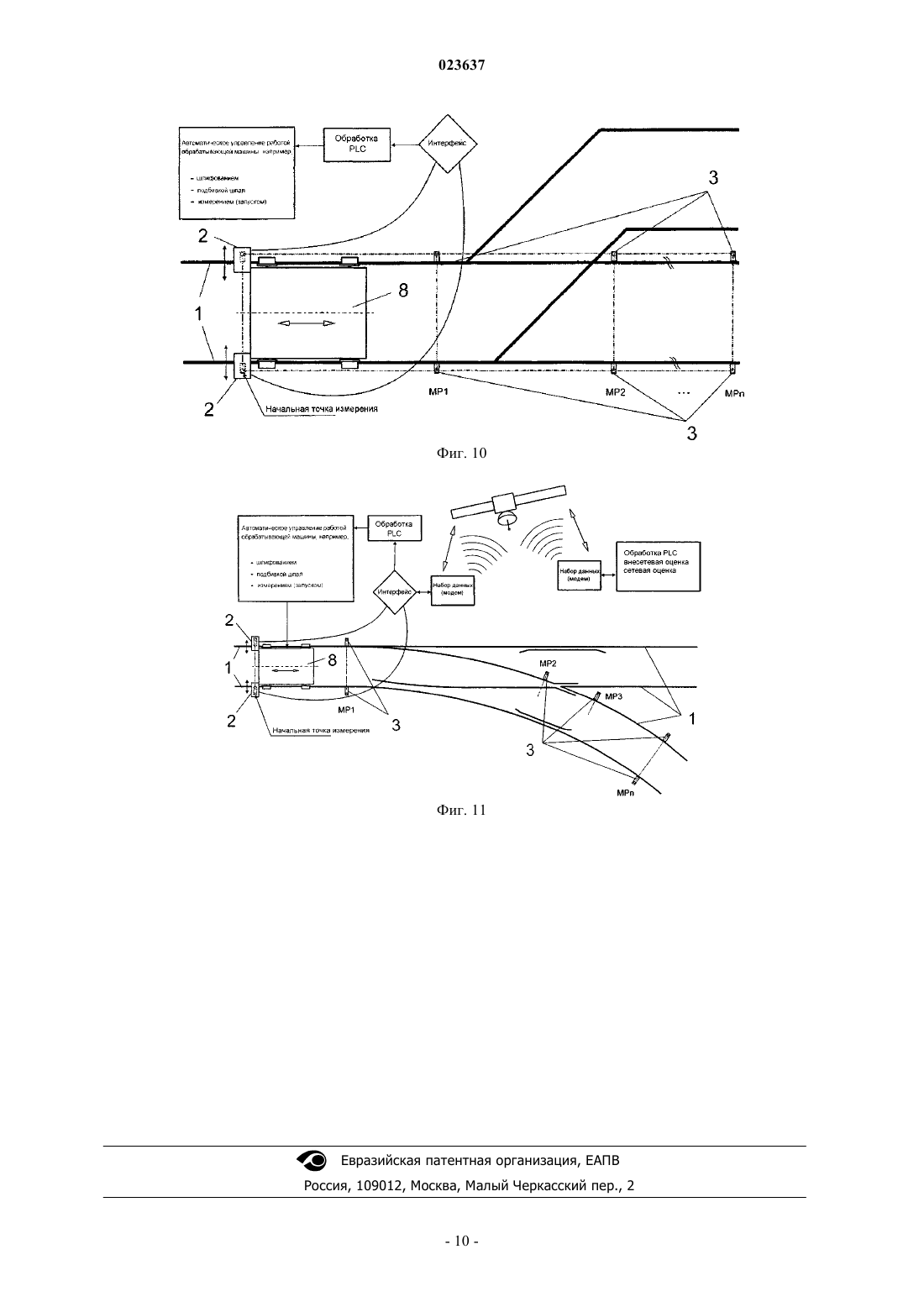
СИСТЕМА ДЛЯ МАРКИРОВКИ УЧАСТКОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ДЕТЕКТИРОВАНИЯ ПРОМАРКИРОВАННЫХ УКАЗАННОЙ МАРКИРОВКОЙ УЧАСТКОВ ПУТИ В ЦЕЛЯХ ОБСЛУЖИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ПУТЕЙ Изобретение относится к системе для маркировки участков железнодорожного пути и детектирования промаркированных указанной маркировкой участков пути в целях обслуживания железнодорожных путей. Задача нахождения новой возможности для маркировки участков железнодорожного пути и детектирования промаркированных указанной маркировкой участков пути, которая позволяет надежно и точно определять положение на участках пути, которые поддаются изнашиванию, к тому же в прямом взаимодействии с обрабатывающим оборудованием,решается согласно изобретению за счет того, что система содержит по меньшей мере один блок независимых датчиков для обнаружения меток маркировки, располагаемых рядом с рельсом, причем датчики указанного блока измеряют бесконтактным образом, основываясь на различных принципах измерения, блок содержит оптический датчик, имеющий спектральноселективную чувствительность, и детектор идентификации для индивидуальной идентификации меток маркировки, каждая метка маркировки выполнена в виде Г-образной или Т-образной угловой детали, первая вертикально ориентированная часть которой выполнена съемно устанавливаемой на рельс, а вторая горизонтально ориентированная часть содержит покрытие, излучающее в узкой спектральной полосе спектрально-селективного датчика, и идентификационную метку для считывания детектором идентификации, и блок независимых датчиков размещен на средстве, которое может перемещаться на путях таким образом, что независимые датчики блока сонаправлены и при перемещении вместе с указанным средством вдоль путей перемещаются параллельно рельсу над метками указанной маркировки. Изобретение относится к конструкции для маркировки и измерения участков пути в целях обслуживания железнодорожных путей, особенно, в области стрелочных переводов, съездов, поворотов и других участков пути, которые поддаются изнашиванию. Измерения пути для определения областей обслуживания выполняется различными способами в уровне техники с помощью оптических, емкостных измерений и измерений вихревыми токами. В этой связи автоматизированное измерение с помощью измерительных поездов обычно является не достаточно точным для важных с точки зрения износа областей, чтобы непосредственно управлять точной работой обрабатывающего оборудования (шлифовальных машин или шпалоподбивочных машин). В связи с этим имеется необходимость в выполнении на месте точных измерений областей обработки при обслуживании пути не только надежно воспроизводимым образом, но и так, чтобы иметь максимально тесную связь с обрабатывающим оборудованием. Компьютеризированные измерительные устройства, используемые в настоящее время, до сих пор не являлись воспроизводимыми с достаточной точностью, особенно для сложных областей пути, таких как повороты или стрелочные переводы, в отношении к положению рабочей области, когда обрабатывающее оборудование неоднократно перемещается по области пути, и его работа должна возобновляться всегда точно в определенном месте (определенном заранее с помощью оборудования для измерения профиля рельса). Измерительное устройство, которое делает возможным проверку состояния железнодорожного пути на участках пути, таких как изогнутые области, описано в DE 3210015 С 2. Оно представляет собой ручное измерительное устройство для измерения бокового положения и высотного положения железнодорожного пути, использующее две расчетные хорды, выполненные в виде треног, которые могут быть установлены неподвижным образом на определенном расстоянии одна от другой и имеют спиртовые уровни, прицельный оптический прибор и дальномерные рейки, и которое имеет основание, имеющее поперечину для размещения на обоих рельсах. Это измерительное устройство измеряет положение пути на больших расстояниях вдоль большой хорды дуги поворота, и для того, чтобы подтверждать положения измерения и положение пути, которое находится таким образом, дополнительно требует привязку к неподвижным точкам (например, стойкам подвесных линий), которые должны быть установлены оператором железнодорожной сети. Оно не позволяет беспрепятственно определять положения пути, соответствующие выявленному состоянию пути, для обслуживания участка пути. Другое измерительное устройство для проверки рельсов, особенно стрелочных переводов,известно из ЕР 1548400 А 1. В этом случае расстояние между рельсами обнаруживается лазерным датчиком расстояния, оптическим волноводом, который испускает лазерный луч на измеряемые точки, и ПЗСприемником в измеряемом месте. Если не считать того, что измерительное устройство, отмеченное выше, использует оптические датчики и только по этой причине не пригодно для использования в обрабатывающем оборудовании, таком как шлифовальные машины, в отношении определения и распознавания отдельных точек измерения (которые могут лежать на расстоянии 2-5 мм) ЕР 1548400 А 1 раскрывает, что эти точки измерения записываются вдоль преодолеваемых расстояний и далее передаются в поворотный энкодер двигающимися колесами измерительного устройства, при этом точки измерения соотносят с измерениями, выполненными в точках измерения (метках маркировки). Это определение положений измерения не является точно воспроизводимым из-за боксования, особенно перемещений взад-вперед в области поворота, так, что это соотношение оказывается неудовлетворительным для управления положениями, где применяется обрабатывающее оборудование. Дополнительно, поворотные энкодеры дают систематические ошибки, которые вызывают накопление ошибок из-за боксования колес во время каждого движения вперед и назад в области обрабатывания. Тогда как для бесконтактного обнаружения положений требуется визуальное обнаружение, загрязнение, вызванное обрабатывающим оборудованием, ухудшает обнаружение точек измерения так, что визуальные способы не могут быть применены в прямой совокупности с обрабатывающим оборудованием (например, рельсошлифовальными машинами). В результате, измерительное устройство для обнаружения положений измерения, которые заранее определялись оборудованием для измерения профиля рельса в качестве дефектных участков рельса или которые определены правилами, относящимися к измерению или обработке, должно быть выполнено таким образом, чтобы оно могло надежно и воспроизводимым образом собирать данные положения вдоль пути, которые не могут быть искажены условиями окружающей среды. В связи с этим задачей изобретения является нахождение новой возможности для маркировки и измерения участков пути в целях обслуживания железнодорожных путей, которая позволяет надежно и точно определять положение участков пути, поддающихся изнашиванию, например поворотов и стрелочных переводов, а также в прямом взаимодействии с обрабатывающим оборудованием, без необходимости того, что обработка рельс должна прекращаться для измерения или что обработка и измерение должны разделяться некоторым другим образом. В конструкции для маркировки и измерения участков пути в целях обслуживания железнодорожных путей, в которой обеспечено средство для оптического захвата точек измерения, выше изложенная задача решается согласно изобретению за счет того, что блок датчиков для обнаружения точек измере-1 023637 ния, расположенный рядом с рельсом, имеет по меньшей мере два независимых детекторных блока, измеряющих бесконтактным образом, основываясь на различных принципах измерения, причем один принцип измерения использует оптический датчик, имеющий спектрально-селективную чувствительность, а второй принцип измерения использует детектор идентификации для индивидуальной идентификации точек измерения, того, что точки измерения имеют по меньшей мере две ножки в качестве угловых элементов, причем первая вертикально ориентированная ножка скреплена с возможностью открепления с рельсом, и обеспечены на второй горизонтально ориентированной ножке покрытием, излучающим в узкой спектральной полосе для спектрально-селективного датчика и носителем значения идентификации для детектора идентификации, и того, что блок датчиков таким образом размещен на устройстве, которое может перемещаться на путях, что независимые детекторные блоки направляются параллельно рельсу в одном и том же направлении по точкам измерения за счет перемещения устройства, которое может перемещаться на путях. Блок датчиков предпочтительно выполнен так, чтобы вертикально вращаться поперечно рельсу. Дополнительно, блок датчиков может быть эффективно размещен так, чтобы быть смещаемым поперечно рельсу для того, чтобы адаптироваться к железнодорожному габариту и ориентации точек измерения в отношении к рельсу. Блок датчиков для каждого рельса предпочтительно обеспечен на устройстве, которое может перемещаться на путях, при этом блоки датчика размещены противоположно друг другу в поперечном направлении в отношении к пути. Точки измерения целесообразно скреплены с возможностью открепления с рельсами посредством постоянного магнита и предпочтительно размещены на внешней стороне или внутренней стороне шейки рельса. В этой связи возможно в случае желобчатого рельса размещать точки измерения на губе (направляющем рельсе (guard rails) или на контррельсе пути. Точки измерения предпочтительно обеспечены люминесцентным слоем в виде покрытия, которое испускает свет в узкой полосе. В этом варианте блок датчиков предпочтительно содержит спектральноселективный датчик для люминесцентного света, который приспособлен к диапазону длин волн излучения люминесцентного слоя. Далее, точки измерения целесообразно обеспечены идентификационным знаком в форме чипаRFID. Для этого варианта выполнения блок датчиков целесообразно содержит радиоволновый преобразователь для считывания чипа RFID. Предпочтительно устройство, которое может перемещаться на путях и служит для крепления блока датчиков, представляет собой обрабатывающее оборудование из группы, содержащей рельсошлифовальные машины или шпалоподбивочные машины. Однако оно также может быть простым измерительным транспортным средством. Изобретение базируется на основной концепции, согласно которой известные устройства измерения рельсов определяют определенные дефектные области либо снаружи и независимо от протяженности пути посредством неподвижных точек (например, стоек), либо требуют оптическое обнаружение мелких измерительных знаков (например, штрих-кодов или т.п.) на пути и определяют положение опосредованно посредством поворотных энкодеров с приводом от колес. В обоих случаях привычное загрязнение,вызванное обработкой, выполняемой на рельсах (например, шлифованием), ухудшает оптическое или механическое измерение положения, несмотря на то, что последнее является необходимым для безошибочного получения значений измерения. Эта проблема решается в изобретении использованием пригодных маркировочных элементов (далее: точек измерения), которые размещаются временно или в течение длительного периода времени на или вблизи железнодорожных путей, характеристики которых таким образом выполнены, что они могут быть обнаружены и получены с достаточной точностью активно или пассивно бесконтактным образом с помощью измерительной системы, которая крепится непосредственно к рельсовому транспортному средству. Изобретение содержит совокупность специально изготовленных точек измерения и сопровождающий блок датчиков, имеющий множественную чувствительность. Вся измерительная система для обрабатываемого участка пути имеет множество "подвижных" точек измерения, которые предпочтительно закреплены отсоединяемым образом непосредственно на боковой поверхности шейки рельса посредством постоянного магнита. Точки измерения выполнены таким образом, что они могут также просто крепиться к губе (бортовому рельсу) так, что, кроме того, они могут быть использованы на замкнутом пути (путь, встроенный в уличную структуру). Тем самым, положения точек измерения определяются, основываясь на данных регистрации измерений устройства измерения профиля рельса, ранее применяемого на участке пути, или в соответствии с установленным правилом, регулирующим измерение или обработку, при этом точки измерения размещаются в местах, которые различают начальную точку и конечную точку одной или более областей обработки, например, для обрабатывающего оборудования (шлифовальной машины или шпалоподбивочной машины). Согласно изобретению точки измерения являются обнаруживаемыми посредством блока датчиков,основываясь по меньшей мере на двух качественно отличающихся принципах измерения, при этом блок датчиков направлен вдоль пути на устройстве, перемещающемся на пути. Посредством простых преобразований возможны дополнительные связь и передача по GPS. Два бесконтактных принципа измерения предпочтительно используются в сочетании с обнаружением, один из которых использует оптический принцип, имеющий наименее возможную подверженность отказам и использующий спектрально-сенситивные маркерные красящие вещества (основанные на фотолюминесценции), тогда как другой принцип измерения представляет собой принцип, основанный на радиоволнах, магнетизме или емкости, позволяет выполнять кодирование (ID метка). Оба принципа могут работать как активно, так и пассивно, но по меньшей мере один активный принцип целесообразно используется для ID метки. Касательно оптического принципа, флуоресцентное красящее вещество, которое в достаточной степени активируется дневным светом или рабочим освещением обрабатывающего оборудования, предпочтительно обнаруживается спектрально-сенситивным оптическим датчиком, который адаптируют под длины волн излучения флуоресцентного красящего вещества. Таким образом, обеспечивается обнаружение положения и исключается путаница или неясности в связи с другими объектами отражения. Точка измерения предпочтительно оснащена чипом RFID (радиочастотным идентификационным чипом). Он служит для идентификации оптически обнаруженной точки измерения и образует "схему" или классификацию областей обработки (которые также могут быть "областями без обработки") обслуживаемого участка пути. Посредством изобретения, как совокупности двух различных способов измерения, применяемых к целесообразно выполненным точкам измерения (маркировочным меткам), возможно осуществлять маркировку и измерение участков пути в целях обслуживания железнодорожных путей так, чтобы позволять надежно и позиционно точно определять участки пути, которые поддаются изнашиванию, к тому же в прямом взаимодействии с обрабатывающим оборудованием без необходимости того, что обработка рельс должна прекращаться для измерения или что обработка и измерение должны разделяться некоторым другим образом. В результате работы системы датчиков согласно изобретению окончательно определяются положение всех точек измерения и их правильная последовательность, неясности исключаются, и точность повторения является воспроизводимой для множества проходов (за исключением боксования колес). Далее изобретение будет описано более полно со ссылкой на варианты выполнения. На чертежах изображено следующее: фиг. 1 показывает схематическую диаграмму точки измерения на рельсе Виньоля; фиг. 2 показывает конструкцию точек измерения в области стрелочного перевода (со съездом); фиг. 3 показывает конструкцию точек измерения в области стрелочного перевода (без съезда); фиг. 4 показывает вид сбоку обрабатывающего оборудования с креплением блока датчиков в задней части; фиг. 5 показывает вид спереди обрабатывающего оборудования с поворачиваемым блоком датчиков; фиг. 6 показывает вид спереди обрабатывающего оборудования со смещаемым блоком датчиков,закрепленным на внешней стороне (рельсе Виньоля); фиг. 7 показывает вид спереди обрабатывающего оборудования со смещаемым блоком датчиков,закрепленным на внутренней области (желобчатом рельсе); фиг. 8 показывает вид спереди обрабатывающего оборудования со смещаемым блоком датчиков,закрепленным на внутренней области (на желобчатом рельсе); фиг. 9 показывает схематическую диаграмму точки измерения с желобчатым рельсом в области обделки, имеющей магнит, который выполнен в виде более короткой ножки углового элемента для крепления точки измерения; фиг. 10 показывает иллюстрацию принципа работа обнаружения точки измерения для прямого управления обрабатывающим оборудованием, основываясь на полученных точках измерения; фиг. 11 показывает иллюстрацию принципа работы обнаружения точки измерения для получения и обработки данных обрабатывающих машин с использованием GPS. Как показано схематически на фиг. 1, основная конструкция согласно изобретению содержит точку 3 измерения, которая размещена с возможностью отсоединения на рельсе 1 (показанном условным образом в виде рельса Виньоля). Блок 2 датчиков, прикрепленный к обрабатывающему оборудованию 8, направляется через точку 3 измерения. Блок 2 датчиков содержит два независимо детекторных блока, которые основаны на различных принципах. Первый детекторный блок представляет собой оптический датчик I, который может захватывать спектрально-селективное излучение в ограниченном диапазоне приема (например, имеющем диаметр 2 см на расстоянии до 25 см) и который адаптируется под излучение, излучаемое точкой 3 измерения в узкой спектральной полосе. Второй детекторный блок выполнен для определенной ID метки и предпочтительно является ак-3 023637 тивным радиоволновым преобразователем II, который может считывать запрограммированное значение чипа 6 RFID. Его диапазон выполнен для приблизительно 10-30 см и ограничен конусом передачи/приема, имеющим приблизительно те же размеры. Точка 3 измерения, подходящая для этого блока 2 датчиков, содержит угловой элемент 4 (например, изготовленный из металла, такого как сталь, нержавеющая сталь, латунь или т.п., недеформирующийся пластик или композит, такой как CRP, GRP, ARP или SRP или другие долговечные, размерноустойчивые материалы). Угловой элемент 4 имеет по меньшей мере две ножки, при этом постоянный магнит 7 прикреплен к или углублен в более короткую ножку 41 из этих двух ножек, и люминесцентный слой 5 (предпочтительно флуоресцентные или фосфоресцентный материал) размещен на верхней стороне более длинной ножки 42. Внешняя сторона длинной ножки 42 направлена вверх по направлению к блоку 2 датчиков. Дополнительно, чип 6 RFID, который содержит ID метку и может быть считан радиоволновым преобразователем II, размещен на длинной ножке 42 углового элемента 4. В специальных вариантах выполнения, короткая ножка 41 может ответвляться с обеих сторон длинной ножки 41, приводя к Т-образному угловому элементу 43 (как показано на фиг. 5). Тогда как оптический датчик I обнаруживает очень узкий диапазон приема (около 6-8 см), предпочтительно для обнаружения флуоресцентного красящего вещества, например люминесцентного слоя 5,который в достаточной степени активируется дневным светом или рабочим освещением обрабатывающего оборудования 8 и в связи с этим обеспечивает достаточное обнаружение положения, радиоволновый преобразователь II ответствен за идентификацию точки 3 измерения и представляет собой в связи с этим детектор в значении "схемы" или классификатора для интерпретации рабочей области для обрабатывающего оборудования 8, причем рабочая область следует за точкой 3 измерения. С этой целью, каждая точка 3 измерения оснащена чипом 6 RFID, в котором запрограммировано определенное ID значение. Наиболее простой код "схемы" состоит из поочередного распределения кода 0/L точек 3 измерения,где "0" идентифицирует начальное положение, a "L" идентифицирует конечное положение для отдельных областей обработки обрабатывающего оборудования 8. В случае если участок пути, который подлежит обслуживанию и на котором обрабатывающее оборудование 8 (неоднократно) перемещается взад и вперед по участку пути, выполняя обработку, имеет множество областей обработки (и в связи с этим множество точек 3 измерения) или областей, содержащих различные этапы обработки, для создания однозначного назначения точек 3 измерения в чипе 6RFID могут быть запрограммированы дивергентные или расширенные цифровые идентификаторы. Точка 3 измерения предпочтительно обнаруживается пассивно и активно блоком 2 датчиков, который перемещается по участку пути с обрабатывающим оборудованием 8. Во время обнаружения совместно применяются два бесконтактных способа измерения так, что оптический принцип, имеющий наименее возможную подверженность отказу и использующий покрытие (люминесцентный слой 5), которое испускает свет в узкой спектральной полосе, чтобы точно определять положение на пути, объединен с радиоволновым преобразователем II, который устанавливает однозначно определенное назначение точки 3 измерения и одновременно исключает возможность того, что посторонний сигнал, обнаруженный оптическим датчиком I, может быть дополнительно ошибочно принят за точку 3 измерения. Альтернативно, магнитный или емкостный принципы измерения также могут быть использованы для обнаружения ID метки. Соответственно, в результате работы системы датчиков согласно изобретению, окончательно определяются положение всех точек 3 измерения и их правильная последовательность, неясности исключаются, и точность повторения обнаружения точек измерения является воспроизводимой в течение множества проходов (за исключением ошибочных положений из-за боксования колес). Точки 3 измерения могут быть использованы для различных маркировок путей, размещенных и переупорядоченных по требованию и повторно использованных по мере необходимости так, что они могут быть использованы для изменений и расширений выполняемых работ (ремонтной работы) на рабочих местах или повторно между последними и всегда однозначно назначаемым образом. Флуоресцентное покрытие (люминесцентный слой 5) может быть восстановлено непосредственно на месте выполнения работ в случае повреждения поверхности (загрязнения, механического воздействия) простым образом (например, с помощью распылителя флуоресцентной краски). В связи с этим точки 3 измерения сопротивляются износу при условии, что чип 6 RFID не разрушен, и сигналы точек 3 измерения являются воспроизводимыми при условии, что точки 3 измерения не смещены произвольно вдоль рельса 1. Точки 3 измерения предпочтительно выполнены в качестве угловых элементов 4, имеющих ширину 2-8 см (предпочтительно 4 см) и длины ножек между 2 и 6 см (предпочтительно 3 см) для короткой ножки 41 и 10-20 см (предпочтительно 12-15 см) для длинной ножки 42. В этой связи короткая ножка 41 также может быть полностью или частично заменена постоянным магнитом 7 или две короткие ножки 41 могут разветвляться с обеих сторон длинной ножки 42, приводя к Т-образной форме. Для пространственного разрешения положения точек 3 измерения может без труда поддерживаться точность позиционирования 1 см, даже, когда ширина углового элемента 4 составляет несколько санти-4 023637 метров, так как она может быть определена просто и точно обнаружением центра или обнаружением края в захваченном оптическом изображении точки 3 измерения. Так как визуальное распознание (обнаружение точек с высоким разрешением) не обязательно, нормальное загрязнение не ухудшает обнаружение положения точек 3 измерения оптическим датчиком I. Однако для того, чтобы ограничивать рабочее загрязнение (например, шлифовальную пыль), дополнительно могут быть введены струи воздуха, предпочтительно посредством форсунок (не показаны), в зазор измерения между точкой 3 измерения и блоком 2 датчиков. Зазор измерения имеет значение между 10 и 30 см, оптимально около 15 см, в вышеупомянутых блоках обнаружения (оптический датчик I и радиоволновый преобразователь II). Вся измерительная система для обрабатываемого участка пути имеет множество "подвижных" точек 3 измерения, которые крепятся временно или вблизи железнодорожных путей 1 простым образом; их крепление надежно выполнено посредством постоянного магнита 7 непосредственно на боковой поверхности соответственного рельса 1. Для того чтобы иметь возможность использовать точки 3 измерения также в замкнутой структуре пути (встроенном пути), они выполнены таким образом, что они также могут без труда крепиться к губе (бортовому рельсу). Их крепление предпочтительно выполнено на внешней стороне пути, как показано на фиг. 5 и 6. Однако имеется широкое множество особых участков пути,которые требуют размещение на внутренней стороне пути или также на губе (бортовом рельсе) или контррельсе, как показано на фиг. 7 и 8. Управление конструкцией, относящейся к типу, описанному выше, показано на фиг. 2 и 3. Для ясности, различные точки 3 измерения показаны только в области пути стрелочного перевода. До обработки пути обрабатывающим оборудованием 8 определенные области обработки определяются на некоторых участках пути, основываясь на ранее определенных условиях изнашивания рельса или на предусмотренных задачах обработки, при этом точки 3 измерения размещаются соответствующим образом. Положения считываются посредством блока 2 датчика, и данные обрабатываются, сохраняются и предоставляются для автоматического управления обрабатывающим оборудованием 8. Фиг. 2 показывает различные областей обработки во время обслуживания пути на участке пути,имеющем стрелочный перевод, который выполнен с возможностью переезда влево (поворот S участка). В этом случае положения 0L-1L, 1L-2L и 2L-3L точек измерения подлежат обнаружению на левостороннем рельсе 1 в качестве областей В и С обработки, тогда как участки 0R-1R, 1R-2R и 3R-4R на правостороннем рельсе 1 представляют собой области обработки, и участок 2R-3R на правостороннем рельсе 1 представляет собой область А без обработки. Отдельные области обработки участка пути, показанного на чертеже, могут быть установлены следующим образом: А - область без обработки (только для перемещения); В - области с частичной обработкой (участок стрелочного перевода); С - области с непрерывной обработкой на поверхности рельса (шлифование всего участка). На фиг. 3 маршрут с прямым перемещением Т (без съезда) регулируется стрелочным переводом. Он приводит к областям 0L-1L, 1L-2L и 3L-4L в качестве активных областей В и С обработки. На правостороннем рельсе 1 головка рельса 1 подлежит обработке только частично (область В) в области стрелочного перевода на участке L1-L2, тогда как между 2L и 3L (пассивная область обработки) прекращается обработка, т.е. шлифующие элементы (не показаны) обрабатывающего оборудования 8 находятся на безопасном расстоянии от рельса 1 так, что стрелочный перевод не повреждается. В положении 3L точки измерения обработка возобновляется и выполняется до положения 4L. На правостороннем рельсе 1 головка рельса обрабатывается полностью на участках от 0R до 1R и от 2R до 3R, тогда как только частично между положениями 1R и 2R измерения. Этот метод обработки может быть повторен по мере необходимости для каждого рельса 1; не имеет значения, перемещается ли вперед или назад обрабатывающее оборудование 8 с блоком 2 датчиков, так как точки 3 измерения гарантируют однозначное назначение положения и области. Этот способ точного управления точками обрабатывающего оборудования 8 может быть применен на любом участке пути и к тому же внутри стрелочных переводов. Тем самым, опасные места, т.е. места,которые не должны быть разрушены, помечаются метками, и безупречная обработка рельса 1 выполняется за счет того, что блок 2 датчиков точно обнаруживает положение. Точное и безошибочное обнаружение точек 3 измерения также позволяет выполнять обработку на множестве последовательных стрелочных переводах любой формы. На виде сбоку обрабатывающего оборудования 8 фиг. 4 показывает, что блок 2 датчиков размещен в передней или задней области обрабатывающего оборудования 8. Вид передней/задней области обрабатывающего оборудования 8, соответственно смещенной на 90 на фиг. 5, показывает, что когда точки 3 измерения размещены на внешней стороне пути, детекторные блоки I и II (оптический датчик I и радиоволновый преобразователь II) предпочтительно выполнены в виде поворачиваемых блоков 21 датчиков так, чтобы сохранять последние на безопасном расстоянии от операций измерения обработки обрабатывающего оборудования 8, предпочтительно в нише корпуса (не показана), например, когда обрабатывающее оборудование 8 перемещается от одного места конструкции до следующего. Дополнительно, фиг. 5 показывает форму точек 3 измерения другого предпочтительного варианта выполнения, в котором Т-образные угловые элементы 43 установлены на внешней стороне шейки рельса 1. Тем самым, короткие ножки 41, установленные на шейке, также могут быть образованы постоянным магнитом 7 так, что длинная ножка 42 прилипает непосредственно к постоянному магниту 7. Фиг. 6 и 7 показывают предпочтительный вариант выполнения, в котором детекторные блоки I и II выполнены в виде блока 22 датчиков, который является смещаемым поперечно направлению пути. Фиг. 6 показывает положение смещаемого блока 22 датчиков, перемещаемого вдоль поперечины 9, для обнаружения точек 3 измерения, размещенных на внешней стороне рельсов 1, тогда как фиг. 7 показывает блок, перемещенный в требуемое положение для точек 3 измерения, прикрепленных к внутренней стороне на желобчатом рельсе 11. В последней схеме крепления губа (бортовой рельс) используется для размещения точки 3 измерения посредством магнита 7 (не показан здесь для простоты). Фиг. 8 показывает подобную ситуацию, в которой участок пути во встроенной конструкции выполняет вынужденное размещение точек 3 измерения на губе (бортовом рельсе) желобчатого рельса 11, так как другие возможности крепления не доступны. По причине того, что рядом с желобчатым рельсом 11 обычно имеются условия ограниченного пространства, иногда необходимо приспосабливать форму точки 3 измерения. Этот тип преобразования точки 3 измерения показан на увеличенном виде на фиг. 9. В этом случае точка 3 измерения преобразована таким образом, что она предпочтительно лежит непосредственно на опорной конструкции дороги (области 12 обделки) и фиксируется фрикционным зацеплением на губе желобчатого рельса 11 с помощью постоянного магнита 7. Фиг. 10 и 11 показывают схематическую диаграмму рабочего режима обнаружения точек 3 измерения в виде схемы передачи данных для прямого управления обрабатывающего оборудования 8 и для введения полученных данных с использованием GPS. Сигналы, полученные от точек 3 измерения посредством блоков 2 датчиков, отправляют пригодным образом с помощью интерфейса в компьютерный блок (PLC), в котором они дополнительно обрабатываются для того, чтобы выполнять специальные этапы обработки непосредственно в обрабатывающем оборудовании 8. На фиг. 11, на которой получение данных измерения является таким же, модем соединен после PLC так, что данные (координаты точек 3 измерения и измеренные значения) подают возвратным образом с помощью спутника в другие местоположения по всему миру (пригодным образом с помощью Интернета в удаленную станцию, имеющую соответствующие данные, к которым разрешен доступ). Ссылочные позиции: 1 - рельс (условный рельс Виньоля); 11 - желобчатый рельс; 12 - область обделки; 2 - блок датчика; 21 - поворачиваемый блок датчиков; 22 - смещаемый блок датчиков;II - радиоволновый преобразователь; 3 - точка измерения; 31 - точка измерения для области обделки; 4 - угловой элемент; 41 - короткая ножка; 42 - длинная ножка; 43 - Т-образный угловой элемент; 5 - люминесцентный слой; 6 - чип RFID; 7 - постоянный магнит; 8 - обрабатывающее оборудование; 9 - поперечина (для смещения блока датчиков); А - область без обработки; В - области с частичной обработкой (на головке рельса); С - область с непрерывной обработкой (на головке рельса); ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система для маркировки участков железнодорожного пути и детектирования промаркированных указанной маркировкой участков пути в целях обслуживания железнодорожных путей, в которой обеспечены средства для оптического обнаружения меток маркировки, отличающаяся тем, что содержит по меньшей мере один блок независимых (2) датчиков (I, II) для обнаружения меток (3) маркировки, располагаемых рядом с рельсом (1), причем датчики указанного блока измеряют бесконтактным образом, основываясь на различных принципах измерения, блок (2) содержит оптический датчик (I), имеющий спектрально-селективную чувствительность, и детектор (II) идентификации для индивидуальной идентификации меток (3) маркировки, каждая метка (3) маркировки выполнена в виде Г-образной или Т-образной угловой детали (4), первая вертикально ориентированная часть (41) которой выполнена съемно устанавливаемой на рельс (1), а вторая горизонтально ориентированная часть (42) содержит покрытие (5), излучающее в узкой спектральной полосе спектрально-селективного датчика (I), и идентификационную метку (6) для считывания детектором (II) идентификации, блок (2) независимых датчиков размещен на средстве (8), которое может перемещаться на путях таким образом, что независимые датчики (I, II) блока (2) сонаправлены, и при перемещении вместе с указанным средством (8) вдоль путей перемещаются параллельно рельсу (1) над метками (3) указанной маркировки. 2. Система по п.1, отличающаяся тем, что блок (2) независимых датчиков выполнен с возможностью поворота в вертикальной плоскости, поперечной рельсу (1). 3. Система по п.1, отличающаяся тем, что блок (2) датчиков выполнен с возможностью смещения поперечно рельсу (1) для того, чтобы приспосабливаться к железнодорожному габариту и расположению меток маркировки на рельсе (1). 4. Система по п.1, отличающаяся тем, что на средстве (8), которое может перемещаться на путях,обеспечен блок (2) датчиков для каждого рельса (1), при этом блоки (2) датчиков размещены противоположно друг другу в поперечном направлении по отношению к пути. 5. Система по п.1, отличающаяся тем, что метки (3) маркировки крепятся к рельсу (1) с помощью постоянного магнита (7). 6. Система по п.5, отличающаяся тем, что метки (3) маркировки крепятся на шейке рельса (1). 7. Система по п.5, отличающаяся тем, что метки (3) маркировки крепятся на губе желобчатого рельса (11). 8. Система по п.5, отличающаяся тем, что метки (3) маркировки размещены на контррельсе пути. 9. Система по п.1, отличающаяся тем, что покрытие, которое излучает свет в узкой спектральной полосе, является люминесцентным слоем (5). 10. Система по п.9, отличающаяся тем, что блок (2) датчиков содержит спектрально-селективный датчик (I) для люминесцентного света, который адаптирован под диапазон длин волн излучения люминесцентного слоя (5). 11. Система по п.1, отличающаяся тем, что идентификационная метка (6) метки (3) маркировки содержит чип RFID (6). 12. Система по п.11, отличающаяся тем, что детектор (II) идентификации блока (2) датчиков содержит радиоволновой преобразователь (II) для считывания чипа RFID (6). 13. Система по п.1, отличающаяся тем, что средство (8), которое может перемещаться на путях, для крепления блока (2) датчиков представляет собой обрабатывающее оборудование (8) из группы, содержащей рельсошлифовальные машины или шпалоподбивочные машины. 14. Система по п.1, отличающаяся тем, что средство (8), которое может перемещаться на путях,представляет собой измерительное транспортное средство.
МПК / Метки
МПК: B61K 9/08, E01B 35/00
Метки: пути, промаркированных, участков, целях, указанной, путей, система, маркировкой, железнодорожных, железнодорожного, детектирования, обслуживания, маркировки
Код ссылки
<a href="https://eas.patents.su/11-23637-sistema-dlya-markirovki-uchastkov-zheleznodorozhnogo-puti-i-detektirovaniya-promarkirovannyh-ukazannojj-markirovkojj-uchastkov-puti-v-celyah-obsluzhivaniya-zheleznodorozhnyh-putejj.html" rel="bookmark" title="База патентов Евразийского Союза">Система для маркировки участков железнодорожного пути и детектирования промаркированных указанной маркировкой участков пути в целях обслуживания железнодорожных путей</a>
Способ очистки щебеночного балласта железнодорожного пути
Номер патента: 19551
Опубликовано: 30.04.2014
Авторы: Бруннингер Манфред, Тойрер Йозеф
МПК: E01B 27/10
Метки: железнодорожного, щебеночного, способ, пути, балласта, очистки
Формула / Реферат:
Способ очистки щебеночного балласта железнодорожного пути с помощью машины (1) с размещенными между двумя рельсовыми ходовыми механизмами (4) первой и второй зачистными цепями (10, 11) для захватывания находящегося под рельсовым путем (5) щебня (2), отличающийся тем, чторельсы (15) пути (5) разрезают и передний - относительно продольного направления (9) - конец (16) рельсового пути поднимают, образуя стыковой зазор (17);заднюю - относительно...
Устройства для смещения упоров кузова железнодорожного подвижного состава с тележками на криволинейных участках пути и кузов железнодорожного подвижного состава с тележками
Номер патента: 19054
Опубликовано: 30.12.2013
Автор: Лопес Гомес Хосе Луис
МПК: B61F 5/22
Метки: пути, упоров, кузов, подвижного, тележками, железнодорожного, состава, смещения, устройства, участках, кузова, криволинейных
Формула / Реферат:
1. Устройство для смещения упоров (8) кузова железнодорожного подвижного состава с тележками на криволинейных участках пути, в котором рама (1) тележки образует внутреннюю полость, на каждой боковой внутренней кромке рамы (1) имеется упор (9, 10), а в полости расположена нижняя выступающая часть (4) кузова так, что между этими боковыми кромками рамы (1) тележки и соответствующими боковыми кромками нижней выступающей части (4) кузова имеется...
Гидравлический инструмент и способ затягивания гайки на пластине на пересечениях железнодорожных путей
Номер патента: 13762
Опубликовано: 30.06.2010
Автор: Юнкерс Джон К.
МПК: E01B 29/28, B25B 21/00
Метки: железнодорожных, путей, затягивания, гидравлический, инструмент, способ, пластине, гайки, пересечениях
Формула / Реферат:
1. Крутильный инструмент с гидравлическим приводом для затягивания гайки через пружинную шайбу на пластине, на пересечениях железнодорожных линий, который включает корпус; два соосных средства привода, с помощью которых прилагаются одинаковые поворотные усилия в противоположных направлениях вокруг оси, одно из вышеуказанных двух соосных средств привода расположено вокруг другого из вышеуказанных двух соосных средств привода; первая муфта...
Метод восстановления щебеночного балластного основания железнодорожного пути
Номер патента: 15954
Опубликовано: 30.12.2011
Авторы: Тойрер Йозеф, Бруннингер Манфред
МПК: E01B 27/10
Метки: балластного, пути, метод, восстановления, железнодорожного, основания, щебеночного
Формула / Реферат:
1. Метод восстановления щебеночного балластного основания (2) железнодорожного пути (3), при котором посредством первого - относительно продольного направления (5) - расчищающего устройства (6) захватывается верхний балластный слой (14), а посредством следующего, второго расчищающего устройства (7) - примыкающий к верхнему балластному слою (14) нижний балластный слой (19), отличающийся тем, что сыпучий материал (17) сбрасывается перед первым -...
Щебеночный плуг для балластировки щебнем железнодорожного пути
Номер патента: 15982
Опубликовано: 30.01.2012
Автор: Фелбер Ханнес
МПК: E01B 27/02
Метки: щебеночный, пути, железнодорожного, щебнем, балластировки, плуг
Формула / Реферат:
1. Щебеночный плуг для балластировки щебнем железнодорожного пути (4) с имеющей ось вращения (8) щеткой-метлой (9) и двумя поперечными ленточными конвейерами (12) с параллельным оси вращения (8) направлением транспортировки (13), при этом каждый поперечный ленточный конвейер (12) имеет расположенный в области продольной стороны машины (14) поворотный конец (15) с осью вращения (16) для сброса щебня на боковую сторону щебеночного балластного слоя...
Предыдущий патент: Плавучая платформа
Следующий патент: Производные 1-{4-(5-арил-[1,2,4]-оксадиазол-3-ил)бензил}пиперидин-4-илкарбоновой кислоты в качестве агонистов s1p1 рецепторов
Случайный патент: Новые соединения пиридопиримидинона, способ их получения и фармацевтические композиции, которые их содержат