Система привода подающего транспортера уборочной машины
Формула / Реферат
1. Система привода подающего транспортера (22) уборочной машины (10), содержащая
регулируемый гидронасос (66), скорость и направление потока которого регулируются посредством первого исполнительного элемента (76), управляемого первым клапаном (90),
гидромотор (68), соединенный с гидронасосом (66) с возможностью пропускания текучей рабочей среды и находящийся в приводной связи с подающим транспортером (22), и
систему (70) управления, соединенную с первым клапаном (90) и устройством (108) обнаружения инородных тел, срабатывающую при обнаружении инородного тела устройством (108) обнаружения инородных тел для побуждения первого исполнительного элемента (76) через первый клапан (90) к установке скорости потока гидронасоса (66) в направлении подачи в нулевое положение,
отличающаяся тем, что система (70) управления способна, по меньшей мере, кратковременно изменять посредством первого клапана (90) направление потока текучей рабочей среды на обратное в случае обнаружения устройством (108) обнаружения инородных тел инородного тела таким образом, что гидромотор (68), по существу, больше не может вращаться в направлении подачи.
2. Система привода по п.1, отличающаяся тем, что система (70) управления способна изменять направления потока текучей рабочей среды посредством первого клапана (90) в течение промежутка времени, который рассчитан таким образом, чтобы гидромотор (68) мгновенно остановился, но не начал вращаться в противоположном направлении.
3. Система привода по п.1 или 2, отличающаяся тем, что первый исполнительный элемент (76) является гидроцилиндром двойного действия, соединенным с клапаном (90), который с помощью первого электромагнита (104) переводится в положение, в котором гидромотор (68) вращается в направлении, соответствующем режиму уборки, а с помощью второго электромагнита (104') - в положение с направлением потока текучей рабочей среды и направлением вращения гидромотора (68), противоположными режиму уборки, и что система (70) управления в случае обнаружения устройством (108) обнаружения инородных тел инородного тела, по меньшей мере, кратковременно обесточивает первый электромагнит (104) и подает ток на второй электромагнит (104').
4. Система привода по п.3, отличающаяся тем, что первый электромагнит (104) работает против действия силы первой пружины (110), а второй электромагнит (104') - против действия силы второй пружины (110').
5. Система привода по одному из пп.1-4, отличающаяся тем, что два или несколько клапанов (90) включены параллельно.
6. Система привода по одному из пп.1-5, отличающаяся тем, что рабочее давление исполнительного элемента (76) поддерживается гидроаккумулятором (102).
7. Система привода по одному из пп.1-6, отличающаяся тем, что клапан (90) является клапаном пропорционального регулирования.
8. Система привода для подающего транспортера (22) уборочной машины (10), содержащая
гидронасос (66), скорость потока которого регулируется посредством первого исполнительного элемента (76), который выполнен с возможностью управления посредством первого клапана (90),
гидромотор (68), соединенный с гидронасосом (66) с возможностью пропускания текучей рабочей среды и находящийся в приводной связи с подающим транспортером (22), а также
систему (70) управления, соединенную с первым клапаном (90) и устройством (108) обнаружения инородных тел, срабатывающую при обнаружении инородного тела устройством (108) обнаружения инородных тел для побуждения первого исполнительного элемента (76) через первый клапан (90) к установке скорости потока гидронасоса (66) в нулевое положение,
отличающаяся тем, что гидромотор (68) имеет загрузочный объем, регулируемый вторым исполнительным элементом (88), соединенным с системой (70) управления, и что система (70) управления выполнена так, что при обнаружении инородного тела устройством (108) обнаружения инородных тел побуждает второй исполнительный элемент (88) к увеличению загрузочного объема гидромотора (68) предпочтительно до максимальной величины, что приводит к минимально возможному углу поворота гидромотора (68) в направлении подачи.
9. Система привода по п.8, отличающаяся тем, что система (70) управления при обнаружении инородного тела устройством (108) обнаружения инородных тел побуждает второй исполнительный элемент (88) к увеличению загрузочного объема гидромотора (68) только в том случае, если в момент срабатывания устройства (108) обнаружения инородных тел он не достиг заранее определенной величины, в частности максимальной величины.
10. Система привода по одному из пп.1-9, отличающаяся тем, что выпуск (82) гидронасоса (66) непосредственно соединен с впуском (86) гидромотора (68), а выпуск (72) гидромотора (68) непосредственно соединен с впуском (80) гидронасоса (66).
11. Подающий транспортер (22) с системой привода по одному из пп.1-10.
12. Уборочная машина, в частности косилка-измельчитель, с подающим транспортером (22) по п.11.

Текст
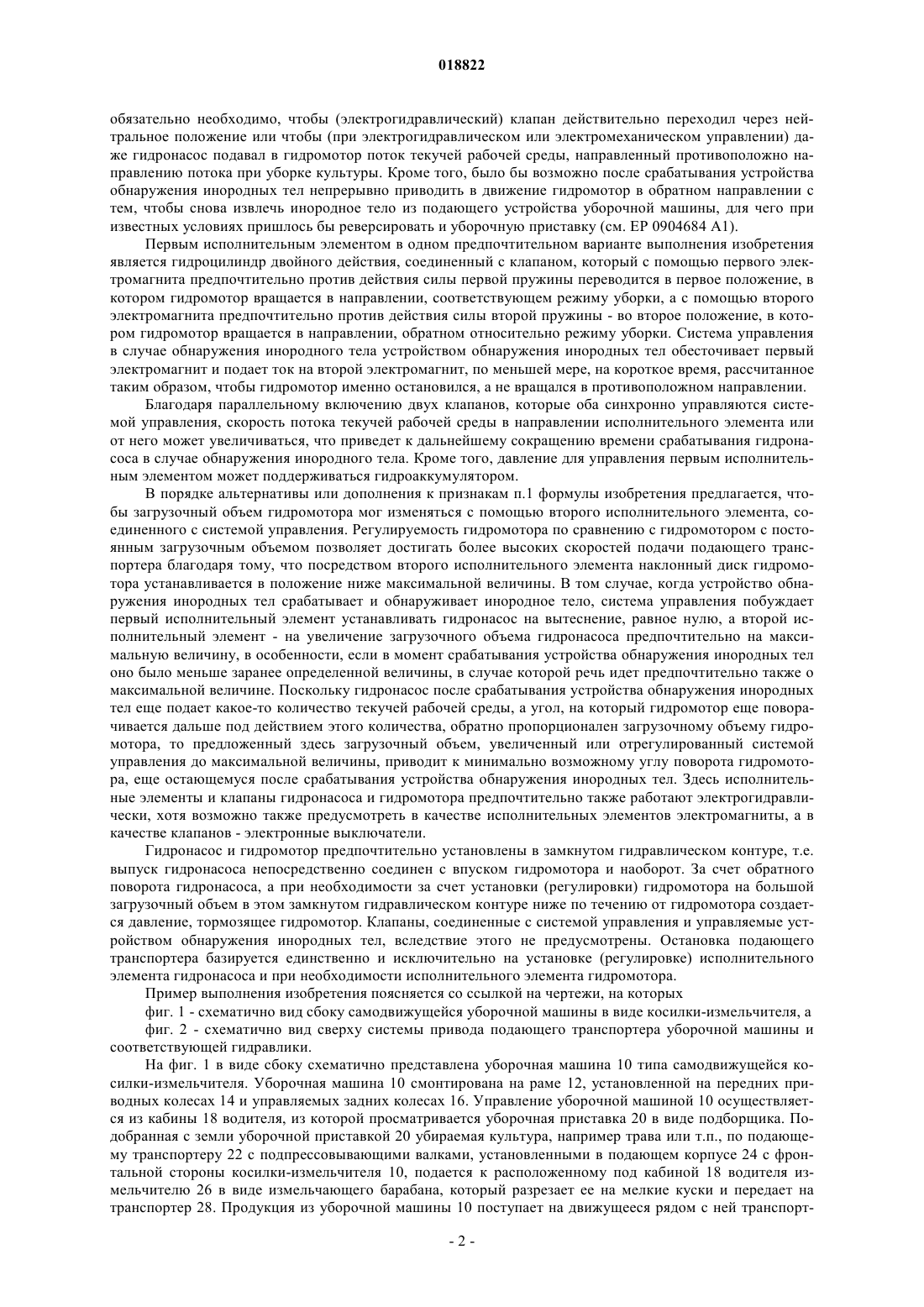
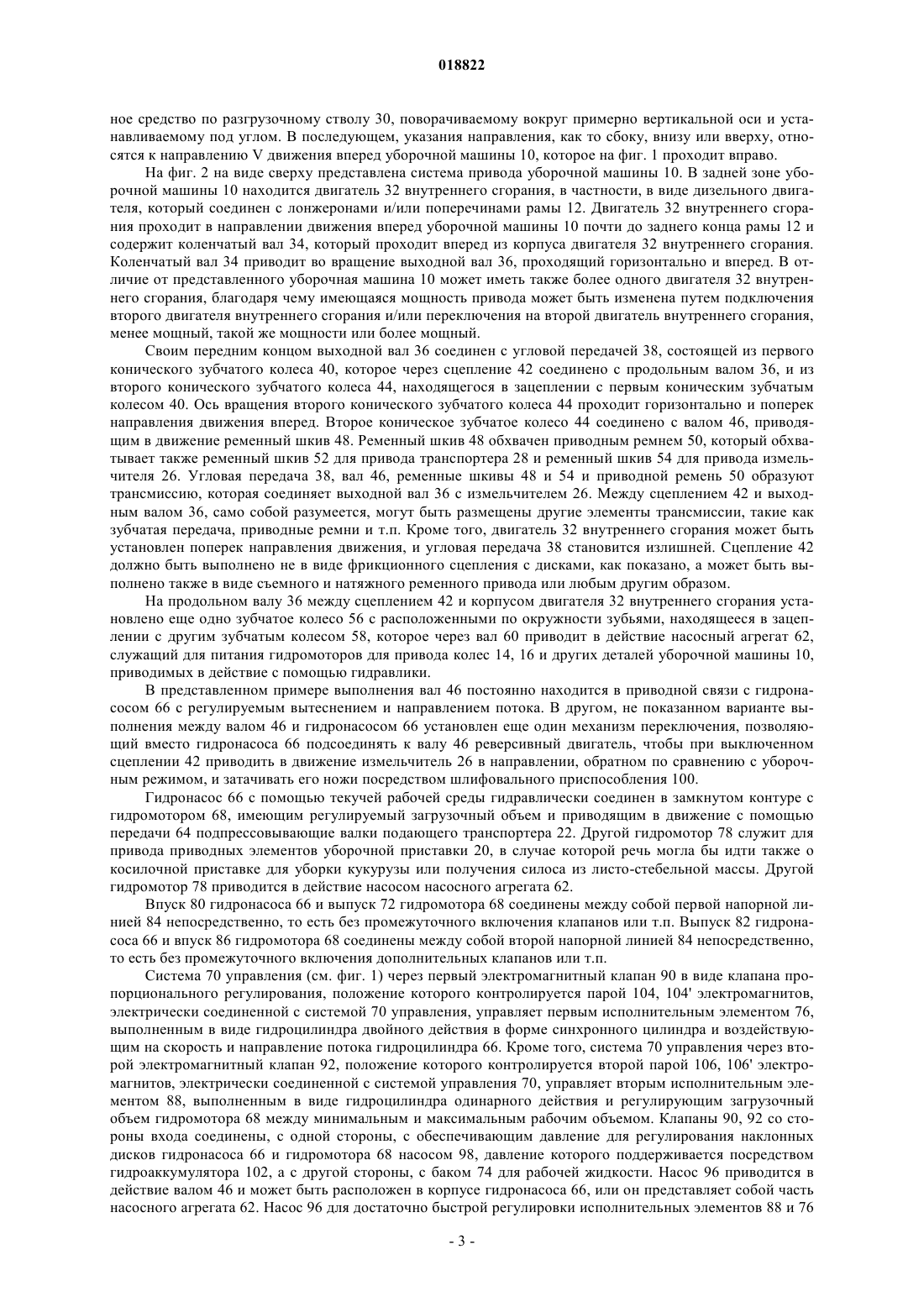
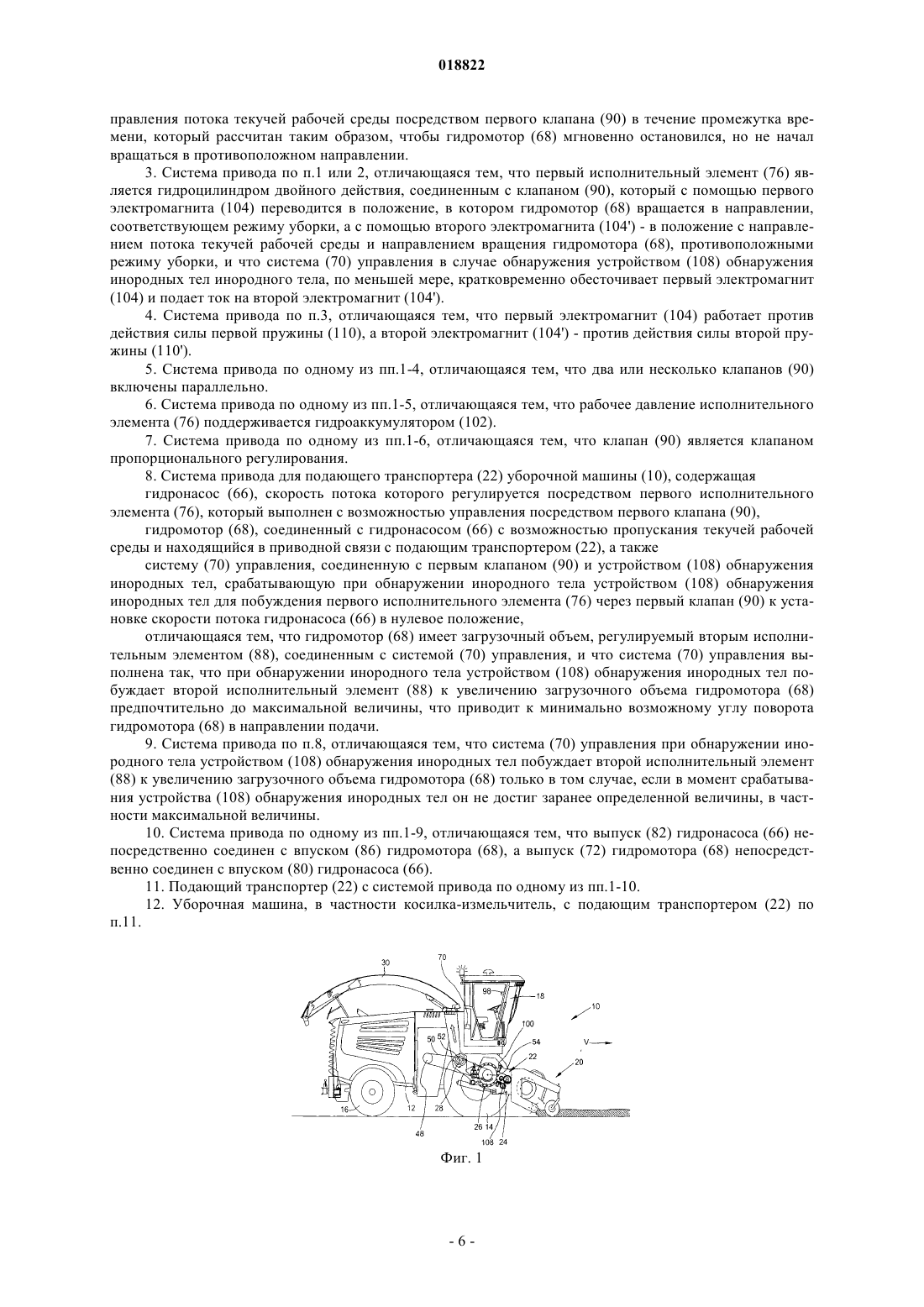
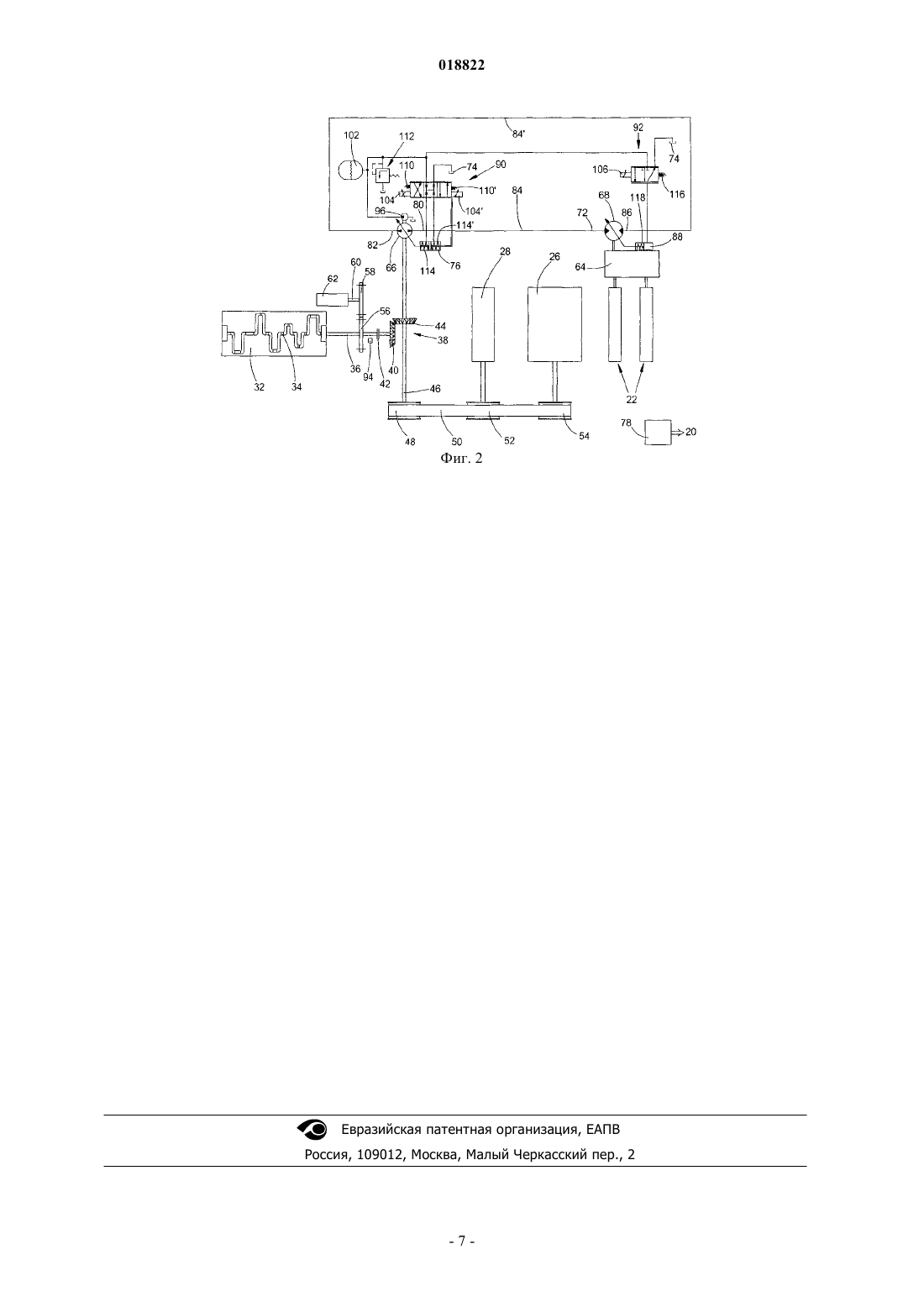
СИСТЕМА ПРИВОДА ПОДАЮЩЕГО ТРАНСПОРТЕРА УБОРОЧНОЙ МАШИНЫ Система привода подающего транспортера (22) уборочной машины (10) содержит регулируемый гидронасос (66), скорость и направление потока которого регулируются посредством первого исполнительного элемента (76), и соединена с гидромотором (68), приводящим в движение подающий транспортер (22). Система (70) управления соединена с устройством (108) обнаружения инородных тел и с первым клапаном (90) для управления исполнительным элементом (76) для регулировки гидронасоса (66). Система (70) управления в случае обнаружения устройством (108) обнаружения инородных тел инородного тела, по меньшей мере, кратковременно управляет первым клапаном (90) в смысле изменения направления потока на обратное. Кроме того, предлагается,чтобы гидромотор (68) имел регулируемый загрузочный объем и чтобы система (70) управления в случае обнаружения инородного тела увеличивала загрузочный объем гидромотора (68).(71)(73) Заявитель и патентовладелец: ДИР ЭНД КОМПАНИ (US); РОБЕРТ БОШ ГМБХ (DE) Изобретение касается системы привода подающего транспортера уборочной машины. В сельскохозяйственных уборочных машинах существует опасность, что наряду с убираемой культурой с поля могут быть также подобраны и отправлены в уборочную машину инородные тела, которые,с одной стороны, могут повредить или разрушить детали уборочной машины, а с другой стороны, являются нежелательными в убираемой культуре, поскольку при ее переработке или скармливании животным они могут привести к нежелательным отрицательным последствиям. Поэтому принято размещать на подающем канале уборочной машины или впереди него устройства обнаружения инородных тел, которые в случае обнаружения инородного тела настолько быстро останавливают подающий механизм уборочной машины, что в уборочной машине не может произойти никаких повреждений, а инородное тело может быть удалено из уборочной машины. Подобные устройства обнаружения инородных тел, чтобы иметь возможность обнаруживать ферромагнитные инородные тела, работают, например, на основе индукции (см., например, DE 19912407 А 1), регистрируют скачкообразно увеличивающуюся при попадании инородного тела толщину слоя мата из растениеводческой продукции (DE 102006043373 А 1), или основываются на шумах, которые производят твердые инородные тела при соударении с валками или другими элементами уборочной машины или уборочной приставки (DE 10200603100 А 1). Для остановки подающего транспортера за необходимое, довольно короткое время, обычно применяют защелки, которые в случае обнаружения инородного тела приводятся в действие с помощью электромагнита или гидроцилиндра и входят в зацепление с зубчатым колесом, соединенным с подающим транспортером без возможности проворота (см. DE 19955901 А и процитированный в этой публикации уровень техники), причем одновременно или незадолго до этого выключается сцепление в трансмиссии подающего транспортера. Сцепление, зубчатое колесо, защелки и их привод требуют относительно больших затрат. Кроме того, предлагалось приводить подающий транспортер в движение гидравлическим путем с использованием гидронасоса, приводимого в действие от двигателя внутреннего сгорания уборочной машины, и гидравлически соединенного с ним гидромотора, приводящего в движение подающий транспортер. В этой связи следует указать на СН 554132 А 5, DE 3341071 А 1, WO 01/65919 A1, WO 02/02498 А 1 и ЕР 1721518 А 1. Отключение гидромотора и тем самым подающего транспортера в случае обнаружения инородного тела осуществляется с помощью установленного между гидронасосом и гидромотором клапана, регулируемого вручную согласно СН 554132 А 5, и посредством детекторного устройства обнаружения инородных тел согласно другим названным публикациям. В WO 02/09498 А 1 в случае обнаружения инородного тела предлагается устанавливать на ноль и гидронасос, так что в этом случае прекращается также поток через байпасную линию, по которой клапан, переведенный в положение останова, отклоняет поток текучей рабочей среды, поступающий с насоса. Регулирование скорости подачи осуществляется согласно WO 01/65919 A1, WO 02/09498 А 1 и ЕР 1721518 А 1 путем регулирования гидронасоса, в то время как рабочий объем гидронасоса является постоянным. При гидроприводах подающих транспортеров, основанных в случае обнаружения инородного тела на отключении потока текучей рабочей среды с помощью гидромотора, затраты на клапаны для аварийного отключения гидромотора следует рассматривать как излишние. Задача, лежащая в основе изобретения, усматривается в создании системы привода подающего транспортера уборочной машины, позволяющей в случае обнаружения инородного тела отключать подающий транспортер простым, но эффективным образом. Поставленная задача согласно изобретению решается посредством признаков, приведенных в п.1 формулы изобретения, причем в последующих пунктах формулы изобретения приведены признаки,предпочтительным образом совершенствующие решение задачи. Система привода подающего транспортера уборочной машины содержит гидронасос с регулируемыми скоростью и направлением потока. Гидронасос, как правило, приводится в действие механически двигателем внутреннего сгорания и гидравлически соединен с гидромотором, который, в свою очередь,механически приводит в действие подающий транспортер. Система управления связана с устройством обнаружения инородных тел и первым клапаном, контролирующим исполнительный элемент для регулирования скорости и направления потока гидронасоса. Система управления управляет первым клапаном в случае обнаружения инородного тела устройством обнаружения инородного тела, по меньшей мере,кратковременно в смысле изменения направления потока на обратное. Таким образом, добиваются того, что гидронасос очень быстро переводится в нулевое положение и подает в гидромотор лишь минимальное количество текучей рабочей среды, так что он не может больше сколь либо заметным образом вращаться в направлении подачи, а мгновенно останавливается, и инородное тело не может причинить уборочной машине никакого вреда. Исполнительный элемент и клапан работают предпочтительно электрогидравлически, хотя было бы также возможно предусмотреть в качестве исполнительного элемента электромагнит, а в качестве клапана - электронный выключатель (например, транзистор, тиристор или реле) для электрического управления электромагнитом. Система управления предпочтительно какое-то время управляет первым клапаном в смысле изменения направления потока на обратное, которое рассчитано таким образом, что гидромотор сразу же останавливается, но не вращается в противоположном направлении. При этом было бы возможно, но не обязательно необходимо, чтобы (электрогидравлический) клапан действительно переходил через нейтральное положение или чтобы (при электрогидравлическом или электромеханическом управлении) даже гидронасос подавал в гидромотор поток текучей рабочей среды, направленный противоположно направлению потока при уборке культуры. Кроме того, было бы возможно после срабатывания устройства обнаружения инородных тел непрерывно приводить в движение гидромотор в обратном направлении с тем, чтобы снова извлечь инородное тело из подающего устройства уборочной машины, для чего при известных условиях пришлось бы реверсировать и уборочную приставку (см. ЕР 0904684 А 1). Первым исполнительным элементом в одном предпочтительном варианте выполнения изобретения является гидроцилиндр двойного действия, соединенный с клапаном, который с помощью первого электромагнита предпочтительно против действия силы первой пружины переводится в первое положение, в котором гидромотор вращается в направлении, соответствующем режиму уборки, а с помощью второго электромагнита предпочтительно против действия силы второй пружины - во второе положение, в котором гидромотор вращается в направлении, обратном относительно режиму уборки. Система управления в случае обнаружения инородного тела устройством обнаружения инородных тел обесточивает первый электромагнит и подает ток на второй электромагнит, по меньшей мере, на короткое время, рассчитанное таким образом, чтобы гидромотор именно остановился, а не вращался в противоположном направлении. Благодаря параллельному включению двух клапанов, которые оба синхронно управляются системой управления, скорость потока текучей рабочей среды в направлении исполнительного элемента или от него может увеличиваться, что приведет к дальнейшему сокращению времени срабатывания гидронасоса в случае обнаружения инородного тела. Кроме того, давление для управления первым исполнительным элементом может поддерживаться гидроаккумулятором. В порядке альтернативы или дополнения к признакам п.1 формулы изобретения предлагается, чтобы загрузочный объем гидромотора мог изменяться с помощью второго исполнительного элемента, соединенного с системой управления. Регулируемость гидромотора по сравнению с гидромотором с постоянным загрузочным объемом позволяет достигать более высоких скоростей подачи подающего транспортера благодаря тому, что посредством второго исполнительного элемента наклонный диск гидромотора устанавливается в положение ниже максимальной величины. В том случае, когда устройство обнаружения инородных тел срабатывает и обнаруживает инородное тело, система управления побуждает первый исполнительный элемент устанавливать гидронасос на вытеснение, равное нулю, а второй исполнительный элемент - на увеличение загрузочного объема гидронасоса предпочтительно на максимальную величину, в особенности, если в момент срабатывания устройства обнаружения инородных тел оно было меньше заранее определенной величины, в случае которой речь идет предпочтительно также о максимальной величине. Поскольку гидронасос после срабатывания устройства обнаружения инородных тел еще подает какое-то количество текучей рабочей среды, а угол, на который гидромотор еще поворачивается дальше под действием этого количества, обратно пропорционален загрузочному объему гидромотора, то предложенный здесь загрузочный объем, увеличенный или отрегулированный системой управления до максимальной величины, приводит к минимально возможному углу поворота гидромотора, еще остающемуся после срабатывания устройства обнаружения инородных тел. Здесь исполнительные элементы и клапаны гидронасоса и гидромотора предпочтительно также работают электрогидравлически, хотя возможно также предусмотреть в качестве исполнительных элементов электромагниты, а в качестве клапанов - электронные выключатели. Гидронасос и гидромотор предпочтительно установлены в замкнутом гидравлическом контуре, т.е. выпуск гидронасоса непосредственно соединен с впуском гидромотора и наоборот. За счет обратного поворота гидронасоса, а при необходимости за счет установки (регулировки) гидромотора на большой загрузочный объем в этом замкнутом гидравлическом контуре ниже по течению от гидромотора создается давление, тормозящее гидромотор. Клапаны, соединенные с системой управления и управляемые устройством обнаружения инородных тел, вследствие этого не предусмотрены. Остановка подающего транспортера базируется единственно и исключительно на установке (регулировке) исполнительного элемента гидронасоса и при необходимости исполнительного элемента гидромотора. Пример выполнения изобретения поясняется со ссылкой на чертежи, на которых фиг. 1 - схематично вид сбоку самодвижущейся уборочной машины в виде косилки-измельчителя, а фиг. 2 - схематично вид сверху системы привода подающего транспортера уборочной машины и соответствующей гидравлики. На фиг. 1 в виде сбоку схематично представлена уборочная машина 10 типа самодвижущейся косилки-измельчителя. Уборочная машина 10 смонтирована на раме 12, установленной на передних приводных колесах 14 и управляемых задних колесах 16. Управление уборочной машиной 10 осуществляется из кабины 18 водителя, из которой просматривается уборочная приставка 20 в виде подборщика. Подобранная с земли уборочной приставкой 20 убираемая культура, например трава или т.п., по подающему транспортеру 22 с подпрессовывающими валками, установленными в подающем корпусе 24 с фронтальной стороны косилки-измельчителя 10, подается к расположенному под кабиной 18 водителя измельчителю 26 в виде измельчающего барабана, который разрезает ее на мелкие куски и передает на транспортер 28. Продукция из уборочной машины 10 поступает на движущееся рядом с ней транспорт-2 018822 ное средство по разгрузочному стволу 30, поворачиваемому вокруг примерно вертикальной оси и устанавливаемому под углом. В последующем, указания направления, как то сбоку, внизу или вверху, относятся к направлению V движения вперед уборочной машины 10, которое на фиг. 1 проходит вправо. На фиг. 2 на виде сверху представлена система привода уборочной машины 10. В задней зоне уборочной машины 10 находится двигатель 32 внутреннего сгорания, в частности, в виде дизельного двигателя, который соединен с лонжеронами и/или поперечинами рамы 12. Двигатель 32 внутреннего сгорания проходит в направлении движения вперед уборочной машины 10 почти до заднего конца рамы 12 и содержит коленчатый вал 34, который проходит вперед из корпуса двигателя 32 внутреннего сгорания. Коленчатый вал 34 приводит во вращение выходной вал 36, проходящий горизонтально и вперед. В отличие от представленного уборочная машина 10 может иметь также более одного двигателя 32 внутреннего сгорания, благодаря чему имеющаяся мощность привода может быть изменена путем подключения второго двигателя внутреннего сгорания и/или переключения на второй двигатель внутреннего сгорания,менее мощный, такой же мощности или более мощный. Своим передним концом выходной вал 36 соединен с угловой передачей 38, состоящей из первого конического зубчатого колеса 40, которое через сцепление 42 соединено с продольным валом 36, и из второго конического зубчатого колеса 44, находящегося в зацеплении с первым коническим зубчатым колесом 40. Ось вращения второго конического зубчатого колеса 44 проходит горизонтально и поперек направления движения вперед. Второе коническое зубчатое колесо 44 соединено с валом 46, приводящим в движение ременный шкив 48. Ременный шкив 48 обхвачен приводным ремнем 50, который обхватывает также ременный шкив 52 для привода транспортера 28 и ременный шкив 54 для привода измельчителя 26. Угловая передача 38, вал 46, ременные шкивы 48 и 54 и приводной ремень 50 образуют трансмиссию, которая соединяет выходной вал 36 с измельчителем 26. Между сцеплением 42 и выходным валом 36, само собой разумеется, могут быть размещены другие элементы трансмиссии, такие как зубчатая передача, приводные ремни и т.п. Кроме того, двигатель 32 внутреннего сгорания может быть установлен поперек направления движения, и угловая передача 38 становится излишней. Сцепление 42 должно быть выполнено не в виде фрикционного сцепления с дисками, как показано, а может быть выполнено также в виде съемного и натяжного ременного привода или любым другим образом. На продольном валу 36 между сцеплением 42 и корпусом двигателя 32 внутреннего сгорания установлено еще одно зубчатое колесо 56 с расположенными по окружности зубьями, находящееся в зацеплении с другим зубчатым колесом 58, которое через вал 60 приводит в действие насосный агрегат 62,служащий для питания гидромоторов для привода колес 14, 16 и других деталей уборочной машины 10,приводимых в действие с помощью гидравлики. В представленном примере выполнения вал 46 постоянно находится в приводной связи с гидронасосом 66 с регулируемым вытеснением и направлением потока. В другом, не показанном варианте выполнения между валом 46 и гидронасосом 66 установлен еще один механизм переключения, позволяющий вместо гидронасоса 66 подсоединять к валу 46 реверсивный двигатель, чтобы при выключенном сцеплении 42 приводить в движение измельчитель 26 в направлении, обратном по сравнению с уборочным режимом, и затачивать его ножи посредством шлифовального приспособления 100. Гидронасос 66 с помощью текучей рабочей среды гидравлически соединен в замкнутом контуре с гидромотором 68, имеющим регулируемый загрузочный объем и приводящим в движение с помощью передачи 64 подпрессовывающие валки подающего транспортера 22. Другой гидромотор 78 служит для привода приводных элементов уборочной приставки 20, в случае которой речь могла бы идти также о косилочной приставке для уборки кукурузы или получения силоса из листо-стебельной массы. Другой гидромотор 78 приводится в действие насосом насосного агрегата 62. Впуск 80 гидронасоса 66 и выпуск 72 гидромотора 68 соединены между собой первой напорной линией 84 непосредственно, то есть без промежуточного включения клапанов или т.п. Выпуск 82 гидронасоса 66 и впуск 86 гидромотора 68 соединены между собой второй напорной линией 84 непосредственно,то есть без промежуточного включения дополнительных клапанов или т.п. Система 70 управления (см. фиг. 1) через первый электромагнитный клапан 90 в виде клапана пропорционального регулирования, положение которого контролируется парой 104, 104' электромагнитов,электрически соединенной с системой 70 управления, управляет первым исполнительным элементом 76,выполненным в виде гидроцилиндра двойного действия в форме синхронного цилиндра и воздействующим на скорость и направление потока гидроцилиндра 66. Кроме того, система 70 управления через второй электромагнитный клапан 92, положение которого контролируется второй парой 106, 106' электромагнитов, электрически соединенной с системой управления 70, управляет вторым исполнительным элементом 88, выполненным в виде гидроцилиндра одинарного действия и регулирующим загрузочный объем гидромотора 68 между минимальным и максимальным рабочим объемом. Клапаны 90, 92 со стороны входа соединены, с одной стороны, с обеспечивающим давление для регулирования наклонных дисков гидронасоса 66 и гидромотора 68 насосом 98, давление которого поддерживается посредством гидроаккумулятора 102, а с другой стороны, с баком 74 для рабочей жидкости. Насос 96 приводится в действие валом 46 и может быть расположен в корпусе гидронасоса 66, или он представляет собой часть насосного агрегата 62. Насос 96 для достаточно быстрой регулировки исполнительных элементов 88 и 76 обеспечивает достаточно большое давление, ограничиваемое клапаном 112 ограничения давления, в то время как гидроаккумулятор 102 обеспечивает необходимый для этого объемный поток. В случае обоих клапанов 90, 92 речь идет о клапанах пропорционального регулирования. Для ускорения регулирования гидронасоса 66 параллельно первому клапану 90 мог бы быть включен и тем самым приведен в действие синхронно с ним системой 70 управления дополнительный аналогичный первый клапан (не показан). Гидроаккумулятор 102 (или другой не показанный гидроаккумулятор) мог бы быть также ниже по течению от клапана 90 подключен к изображенной справа линии в направлении исполнительного элемента 76. Как правило, исполнительный элемент 76, а также предпочтительно клапан 90, интегрированы в корпус гидронасоса 66 по аналогии с исполнительным элементом 88, а также предпочтительно с клапаном 92, интегрированными в корпус гидромотора 68. Вместо показанной электрогидравлической регулировки гидронасоса 66 и/или гидромотора 68 можно было бы также применить чисто электромагнитную регулировку. Наконец, система 70 управления с исполнительным элементом 94, выключающим и включающим сцепление 42, соединена с устройством 98 ввода данных оператора, установленным в кабине 18 водителя, и с устройством 108 обнаружения инородных тел. Последнее находится в нижнем, переднем подающем валке подающего транспортера 22 и регистрирует ферромагнитные тела, содержащиеся в захваченном мате убираемой культуры. В порядке альтернативы или дополнения может быть применено также любое другое устройство обнаружения инородных тел, реагирующее, например, на звук, издаваемый при попадании камней, и/или на скачкообразное увеличение пропускной способности, регистрируемой по положению верхнего валка подающего транспортера 22, или основанное на электромагнитных волнах,просвечивающих мат убираемой культуры. Устройство 98 ввода данных оператора позволяет оператору выбрать режим движения (по дороге), в котором сцепление 42 выключено, и ни измельчитель 26, ни подающий транспортер 22 не приводятся в движение, поскольку гидронасос 66 также не работает. Другой гидронасос 78 и тем самым уборочная приставка 20 в этом случае также не приводятся в движение. Колеса 14, а при известных условиях также колеса 16 (при приводе на все колеса) приводятся в движение их гидромоторами и насосным агрегатом 62. Кроме того, устройство 98 ввода данных оператора позволяет оператору выбрать режим уборки, в котором сцепление 42 включено, а измельчитель 26 и транспортер 28 приводятся в движение с помощью приводных ремней 50. Затем вал 26 приводит в действие также гидронасос 66, который по линии 84' нагружает гидромотор 68, который, в свою очередь, приводит в движение подающий транспортер 22. Затем от насосного агрегата 62 посредством другого гидромотора 78 приводится в движение уборочная приставка 20. Исполнительные элементы 76, 88 с помощью системы 70 управления посредством согласованных с клапанами 92 электромагнитов 104 и 106 управляются таким образом, что получается желательная длина резки измельченной массы, которая может быть задана с помощью устройства 98 ввода данных оператора или задана автоматически системой управления на основе результатов измерения от датчиков,регистрирующих свойства измельчаемой массы, такие как влажность или сжимаемость. Для достижения желательной длины резки загрузочный объем гидромотора 68 предпочтительно устанавливается на максимально возможную величину, а для достижения максимально возможного крутящего момента подающего транспортера 22, соответственно, подгоняется вытеснение гидронасоса 66. Регулируемость гидромотора 68 по сравнению с гидромотором с постоянным загрузочным объемом позволяет достигать более высоких скоростей подачи подающего транспортера 22 и тем самым меньшей длины резки, благодаря тому, что исполнительный элемент 92 приводит наклонный диск гидромотора 68 в положение ниже максимальной величины. В режиме уборки на электромагнит 104 клапана 90 гидронасоса 66 подается ток, так что он против действия силы первой пружины 110' перемещает клапан 90 влево и устанавливает его в положение, в котором исполнительный элемент 76 перемещает наклонный диск гидронасоса 66 в позицию, в которой гидронасос 66 через выпуск 82 и по линии 84' подает текучую рабочую среду к впуску 86 гидромотора 68, которая затем по линии 84 от выпуска 72 гидромотора 68 достигает впуска 80 гидронасоса 66. Сообразно этому понятия "впуск" и "выпуск" относятся к направлению потока текучей рабочей среды в режиме уборки. В режиме уборки ток на электромагнит 104' (а при известных условиях на электромагнит 106) не подается. Для производимой оператором с помощью устройства 98 ввода данных остановки гидромотора 66 по окончании режима уборки при отсутствии тока с помощью системы управления переключается только электромагнит 104, так что клапан 90 в этом случае с помощью пружины 110' устанавливается в нейтральное положение, после чего исполнительный элемент 76 под действием силы интегрированной пружины 114' также устанавливается в нейтральное или среднее положение, в котором объемный расход гидронасоса 66 равен нулю. Устройство ввода 98 данных оператора обеспечивает также выбор реверсивного режима, в котором подающий транспортер 22 по сравнению с режимом уборки приводится в движение в обратном направлении. В этом случае система 70 управления обеспечивает подачу тока только на электромагнит 104', перемещающий клапан 90 против действия силы второй пружины 110 вправо и приводящий его тем самым в положение, в котором исполнительный элемент 76 устанавливает наклонный диск гидронасоса 66 в позицию, в которой гидронасос 66 подает текучую рабочую среду по линии 84 к гидромотору 68, которая затем по линии 84' течет обратно к гидронасосу 66. При реверсиро-4 018822 вании электромагнит 104 не обесточивается. По окончании реверсивного режима система 70 управления обесточивает электромагнит 104', так что в этом случае клапан 90 под действием пружины 110 устанавливается в нейтральное положение, после чего исполнительный элемент 76 под действием встроенной пружины 114 также устанавливается в нейтральное или среднее положение, в котором объемный расход гидронасоса 66 равен нулю. Следует отметить, что давление в линиях 84, 84' может ограничиваться с помощью клапанов ограничения давления (не показаны), а линии 84, 84' могут снабжаться достаточными количествами текучей рабочей среды через дополнительные клапаны (не показаны). Для этого следует сослаться на процитированный вначале уровень техники. В том случае, если устройство 108 обнаружения инородных тел в режиме уборки обнаруживает в подающем транспортере 22 инородное тело и передает в систему 70 управления соответствующий сигнал, то система 70 управления сразу же обесточивает электромагнит 104, так что пружина 110' стремится перевести клапан 90, а тем самым и исполнительный элемент 76 в нейтральное положение. Этот процесс ускоряется путем одновременной ограниченной по времени подачи тока на электромагнит 104'. Тем самым, поток текучей рабочей среды в линии 84 мгновенно прекращается. Согласно этому клапан 90 на фиг. 2 переводится в правое положение. Подача тока на второй электромагнит 104' по времени продолжается только до тех пор, пока гидромотор 68 не остановится, но еще не начнет вращаться в обратную сторону. Одновременно система 70 управления побуждает электромагнит 106 к установке клапана 92 в положение, в котором исполнительный элемент 88 перемещает наклонный диск гидромотора 68 в положение максимального загрузочного объема, если он еще не находится в этом положении. Предпочтительно,чтобы на электромагнит 106 (не так, как показано на фиг. 2) в положении максимального загрузочного объема подавался максимальный электрический ток так, чтобы клапан 92 с помощью электромагнита 106 активно переводился в положение пропускания, а давление от насоса 96 в этом случае активно переводило исполнительный элемент 88 против действия силы пружины, встроенной в исполнительный элемент 88, в желательное положение. Однако возможен также другой вариант, при котором пружина 116 для достижения максимального загрузочного объема гидромотора 68 устанавливает клапан 92 в положение закрытия и/или пружина 118 перемещает исполнительный элемент 88 и наклонный диск гидромотора 68 в положение максимального загрузочного объема. В результате включения электромагнита 104' добиваются того, чтобы после срабатывания устройства 108 обнаружения инородных тел по линии 84 протекало лишь минимальное количество текучей рабочей среды и этот поток поворачивал гидромотор 68 дальше за счет управляемого максимального загрузочного объема лишь на минимальный угол. В результате обратного поворота поворотной пластины гидронасоса 66 в замкнутом гидравлическом контуре ниже по течению от гидромотора 68 дополнительно создается давление, тормозящее гидромотор 68. В соответствии с этим подающий транспортер 22 во избежание повреждения измельчителя 26 инородными телами останавливается достаточно быстро. Наконец, система 70 управления автоматически или после ввода оператором данных в устройство 98 ввода данных может побудить электромагниты 104' и при необходимости 106 к созданию в линии 84 потока рабочей жидкости и к приведению гидромотора 68 в движение в обратном направлении по сравнению с режимом уборки так, чтобы подающий транспортер реверсировался с тем, чтобы снова удалить инородное тело. Одновременно другой гидромотор 78 реверсирует также привод уборочной приставки 20. По завершении процесса реверсирования, обследования выданной убираемой продукции оператором и получения им подтверждения, что инородное тело удалено, путем ввода соответствующих данных в устройство 98 ввода данных система 70 управления побуждается к продолжению обычного режима уборки. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система привода подающего транспортера (22) уборочной машины (10), содержащая регулируемый гидронасос (66), скорость и направление потока которого регулируются посредством первого исполнительного элемента (76), управляемого первым клапаном (90),гидромотор (68), соединенный с гидронасосом (66) с возможностью пропускания текучей рабочей среды и находящийся в приводной связи с подающим транспортером (22), и систему (70) управления, соединенную с первым клапаном (90) и устройством (108) обнаружения инородных тел, срабатывающую при обнаружении инородного тела устройством (108) обнаружения инородных тел для побуждения первого исполнительного элемента (76) через первый клапан (90) к установке скорости потока гидронасоса (66) в направлении подачи в нулевое положение,отличающаяся тем, что система (70) управления способна, по меньшей мере, кратковременно изменять посредством первого клапана (90) направление потока текучей рабочей среды на обратное в случае обнаружения устройством (108) обнаружения инородных тел инородного тела таким образом, что гидромотор (68), по существу, больше не может вращаться в направлении подачи. 2. Система привода по п.1, отличающаяся тем, что система (70) управления способна изменять на-5 018822 правления потока текучей рабочей среды посредством первого клапана (90) в течение промежутка времени, который рассчитан таким образом, чтобы гидромотор (68) мгновенно остановился, но не начал вращаться в противоположном направлении. 3. Система привода по п.1 или 2, отличающаяся тем, что первый исполнительный элемент (76) является гидроцилиндром двойного действия, соединенным с клапаном (90), который с помощью первого электромагнита (104) переводится в положение, в котором гидромотор (68) вращается в направлении,соответствующем режиму уборки, а с помощью второго электромагнита (104') - в положение с направлением потока текучей рабочей среды и направлением вращения гидромотора (68), противоположными режиму уборки, и что система (70) управления в случае обнаружения устройством (108) обнаружения инородных тел инородного тела, по меньшей мере, кратковременно обесточивает первый электромагнит(104) и подает ток на второй электромагнит (104'). 4. Система привода по п.3, отличающаяся тем, что первый электромагнит (104) работает против действия силы первой пружины (110), а второй электромагнит (104') - против действия силы второй пружины (110'). 5. Система привода по одному из пп.1-4, отличающаяся тем, что два или несколько клапанов (90) включены параллельно. 6. Система привода по одному из пп.1-5, отличающаяся тем, что рабочее давление исполнительного элемента (76) поддерживается гидроаккумулятором (102). 7. Система привода по одному из пп.1-6, отличающаяся тем, что клапан (90) является клапаном пропорционального регулирования. 8. Система привода для подающего транспортера (22) уборочной машины (10), содержащая гидронасос (66), скорость потока которого регулируется посредством первого исполнительного элемента (76), который выполнен с возможностью управления посредством первого клапана (90),гидромотор (68), соединенный с гидронасосом (66) с возможностью пропускания текучей рабочей среды и находящийся в приводной связи с подающим транспортером (22), а также систему (70) управления, соединенную с первым клапаном (90) и устройством (108) обнаружения инородных тел, срабатывающую при обнаружении инородного тела устройством (108) обнаружения инородных тел для побуждения первого исполнительного элемента (76) через первый клапан (90) к установке скорости потока гидронасоса (66) в нулевое положение,отличающаяся тем, что гидромотор (68) имеет загрузочный объем, регулируемый вторым исполнительным элементом (88), соединенным с системой (70) управления, и что система (70) управления выполнена так, что при обнаружении инородного тела устройством (108) обнаружения инородных тел побуждает второй исполнительный элемент (88) к увеличению загрузочного объема гидромотора (68) предпочтительно до максимальной величины, что приводит к минимально возможному углу поворота гидромотора (68) в направлении подачи. 9. Система привода по п.8, отличающаяся тем, что система (70) управления при обнаружении инородного тела устройством (108) обнаружения инородных тел побуждает второй исполнительный элемент(88) к увеличению загрузочного объема гидромотора (68) только в том случае, если в момент срабатывания устройства (108) обнаружения инородных тел он не достиг заранее определенной величины, в частности максимальной величины. 10. Система привода по одному из пп.1-9, отличающаяся тем, что выпуск (82) гидронасоса (66) непосредственно соединен с впуском (86) гидромотора (68), а выпуск (72) гидромотора (68) непосредственно соединен с впуском (80) гидронасоса (66). 11. Подающий транспортер (22) с системой привода по одному из пп.1-10. 12. Уборочная машина, в частности косилка-измельчитель, с подающим транспортером (22) по п.11.
МПК / Метки
МПК: A01F 29/16, F16H 61/42
Метки: уборочной, транспортера, подающего, машины, привода, система
Код ссылки
<a href="https://eas.patents.su/8-18822-sistema-privoda-podayushhego-transportera-uborochnojj-mashiny.html" rel="bookmark" title="База патентов Евразийского Союза">Система привода подающего транспортера уборочной машины</a>
Приводная система для уборочной машины
Номер патента: 16881
Опубликовано: 30.08.2012
Авторы: Борер Штефан, Вайс Хельмут
МПК: A01D 69/03, A01D 41/02
Метки: машины, система, уборочной, приводная
Формула / Реферат:
1. Приводная система для уборочной машины (10), содержащаядвигатель (32) внутреннего сгорания с выходным валом (36),приспособление для обработки собираемого урожая, которое предназначено для соединения через содержащую сцепление (42) трансмиссию с выходным валом (36) двигателя (32) внутреннего сгорания,гидронасос (66), соединенный с трансмиссией со стороны сцепления (42), к которому также подсоединено приспособление для обработки собираемого...
Приводная система для уборочной машины
Номер патента: 15771
Опубликовано: 30.12.2011
Авторы: Борер Штефан, Вайссиг Йорг
МПК: F16H 41/00, F16H 39/02, A01D 69/06...
Метки: система, машины, приводная, уборочной
Формула / Реферат:
1. Приводная система для уборочной машины (10), содержащаядвигатель (36, 38) внутреннего сгорания,устройство для обработки убираемой культуры, выполненное с возможностью приводного механического соединения через трансмиссию с двигателем (36, 38) внутреннего сгорания, причем трансмиссия содержит выключаемое сцепление (78), приводимое в действие с помощью исполнительного элемента (122),первый гидронасос (110), соединенный с трансмиссией на входной...
Гибридное стыковое соединение ленты полотенного транспортера в сельскохозяйственной уборочной машине
Номер патента: 17025
Опубликовано: 28.09.2012
Авторы: Пюрик Корвин М., Гривачески Шелдон Дж., Коэрс Брюс А., Ловетт Бенджамин М.
МПК: A01D 61/02
Метки: стыковое, полотенного, машине, транспортера, соединение, сельскохозяйственной, ленты, гибридное, уборочной
Формула / Реферат:
1. Полотенная платформенная жатка для использования в сельскохозяйственной уборочной машине, содержащаясекцию жатки, включающую в себя транспортерную ленту, имеющую противоположные концы, два боковых края, ограничивающих ширину транспортерной ленты, и множество разнесенных в продольном направлении планок для перемещения материала, проходящих в поперечном направлении между боковыми краями, при этом каждая планка имеет длину, которая меньше ширины...
Секционная направляющая транспортерной ленты для полотенного транспортера в сельскохозяйственной уборочной машине
Номер патента: 17052
Опубликовано: 28.09.2012
Авторы: Ловетт Бенджамин М., Эндриос Джон, Коэрс Брюс А.
МПК: A01D 34/125, A01D 61/02, A01D 57/20...
Метки: транспортерной, сельскохозяйственной, полотенного, уборочной, транспортера, ленты, направляющая, машине, секционная
Формула / Реферат:
1. Платформенная жатка для использования в сельскохозяйственной уборочной машине, содержащаямножество секций жатки, при этом по меньшей мере одна секция жатки содержитузел режущего аппарата, выполненный с возможностью ограниченного перемещения в направлениях вверх и вниз;бесконечную транспортерную ленту, имеющую переднюю кромку;множество опор транспортерной ленты, установленных на узле режущего аппарата, каждая из которых, по меньшей мере,...
Система привода рабочего транспортного средства
Номер патента: 17546
Опубликовано: 30.01.2013
Автор: Борер Штефан
МПК: F16H 39/02, B60K 6/00, F16H 61/42...
Метки: рабочего, система, привода, средства, транспортного
Формула / Реферат:
1. Самоходная уборочная машина, содержащаядвигатель (14) внутреннего сгорания,находящийся в приводном соединении с двигателем (14) внутреннего сгорания гидравлический насос (18), у которого вытеснение текучей среды является изменяемым посредством первого исполнительного элемента (62),связанный с гидравлическим насосом (18) с возможностью передачи гидравлической жидкости гидромотор (26, 28), у которого вытеснение текучей среды является изменяемым...
Предыдущий патент: Фунгицидная композиция
Следующий патент: Устройство для хранения и высвобождения продукта, хранящегося в резервуаре, содержащем разрывную стенку
Случайный патент: Циклические аналоги 4-амино-4-оксобутаноил пептидов, ингибиторы репликации вирусов