Система привода рабочего транспортного средства
Формула / Реферат
1. Самоходная уборочная машина, содержащая
двигатель (14) внутреннего сгорания,
находящийся в приводном соединении с двигателем (14) внутреннего сгорания гидравлический насос (18), у которого вытеснение текучей среды является изменяемым посредством первого исполнительного элемента (62),
связанный с гидравлическим насосом (18) с возможностью передачи гидравлической жидкости гидромотор (26, 28), у которого вытеснение текучей среды является изменяемым посредством второго исполнительного элемента (52, 56) и который находится в приводном соединении по меньшей мере с одним движителем (10, 12), находящимся в контакте с землей,
и управляющее устройство (40), которое связано с системой (64) управления двигателем (14) внутреннего сгорания, первым исполнительным элементом (62), вторым исполнительным элементом (52, 56), выполненным с возможностью определения существующего с выходной стороны на гидравлическом насосе (18) давления датчиком (46, 60) давления и выполненным с возможностью формирования сигнала номинальной скорости устройством (22) задания скорости и которое выполнено с возможностью приведения в действие, чтобы управлять первым исполнительным элементом (62) и вторым исполнительным элементом (52, 56) таким образом, что движитель (10, 12) приводится в движение с номинальной скоростью, задаваемой устройством (22) задания скорости,
причем управляющее устройство (40) выполнено с возможностью приведения в действие таким образом, чтобы побуждать исполнительные элементы (62, 52, 56) перемещать поворотные диски (20, 54, 58) гидравлического насоса (18) и гидромотора (26, 28) исходя из максимального вытеснения текучей среды гидравлического насоса (18) и зависящего от сигнала номинальной скорости положения второго исполнительного элемента (52, 56) в направлении менее значительного вытеснения текучей среды до тех пор, пока давления, определенные посредством датчиков (46, 60) давления, не станут соответствовать оптимальному значению, которое соответствует максимальному общему коэффициенту полезного действия гидравлической передачи и записано в связанном с устройством (40) управления запоминающем устройстве (68),
управляющее устройство (40) связано с переключателем (66) для переключения между режимом работы в поле и режимом движения по проезжей части,
и при этом управляющее устройство (40) и система (64) управления двигателем выполнены так, что число оборотов двигателя (14) внутреннего сгорания при установленном на режим работы в поле переключателе (66) может быть жестко задано либо оператором, либо основанным на значениях датчика для соответствующей производительности уборки урожая автоматическим управлением и является постоянным, чтобы предоставить подходящие числа оборотов для рабочих агрегатов уборочной машины, в то время как устройство (40) управления при установленном на режим движения по проезжей части переключателе (66) приводится в действие, чтобы также варьировать число оборотов двигателя (14) внутреннего сгорания для достижения максимального общего коэффициента полезного действия системы привода.
2. Самоходная уборочная машина по п.1, отличающаяся тем, что управляющее устройство (40) связано с датчиком (70, 72) вращающего момента, выполненным с возможностью определения отдаваемого гидромотором (26, 28) вращающего момента, и приводится в действие, чтобы побуждать первый и второй исполнительные элементы (62, 52, 56) увеличивать вытеснения текучей среды гидравлического насоса (18) и гидромотора (26, 28), когда сигнал датчика (70, 72) вращающего момента превышает пороговое значение, и/или наоборот.
3. Самоходная уборочная машина по п.1 или 2, выполненная в виде зерноуборочного комбайна или силосоуборочного комбайна.

Текст
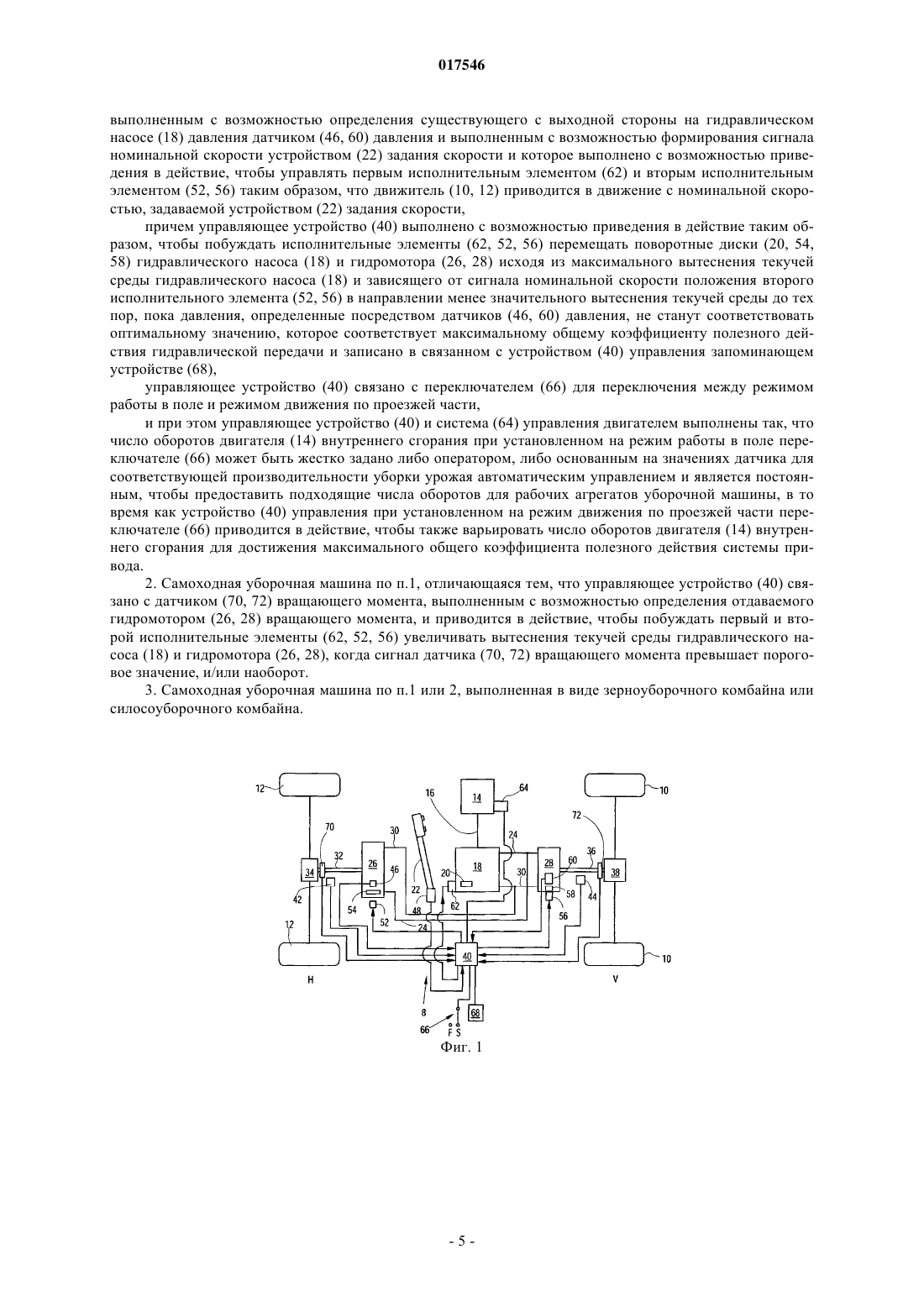
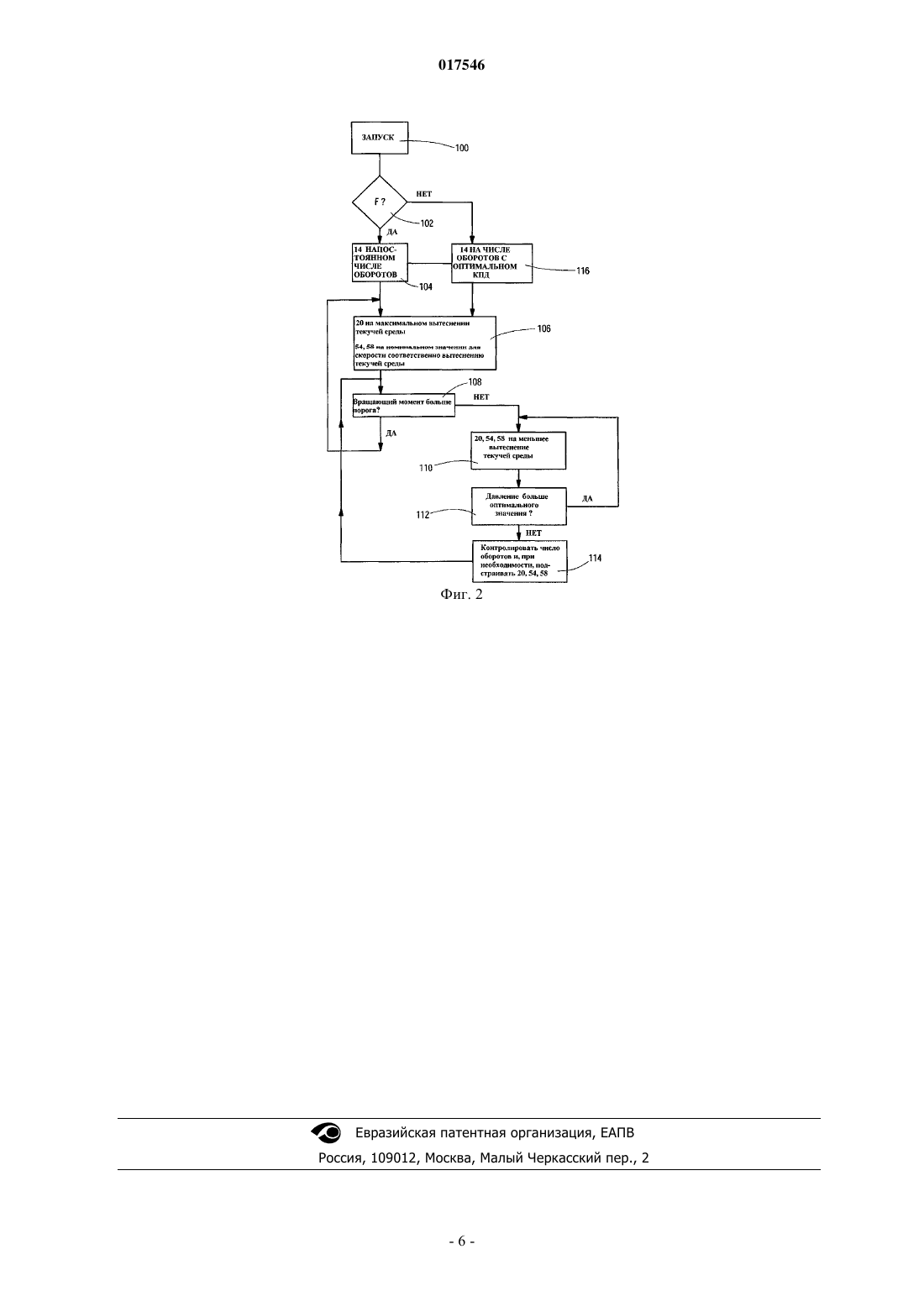
СИСТЕМА ПРИВОДА РАБОЧЕГО ТРАНСПОРТНОГО СРЕДСТВА Изобретение относится к системе привода рабочего транспортного средства (8) с двигателем(14) внутреннего сгорания, находящимся в приводном соединении с двигателем (14) внутреннего сгорания гидравлическим насосом (18), у которого вытеснение текучей среды является изменяемым посредством первого исполнительного элемента (62), связанным с гидравлическим насосом (18) с возможностью передачи гидравлической жидкости гидромотором (26, 28), у которого вытеснение текучей среды является изменяемым посредством второго исполнительного элемента(52, 56), и который находится в приводном соединении по меньшей мере с одним движителем(10, 12), находящимся в контакте с землей. Предложено приводить в действие управляющее устройство (40) таким образом, чтобы управлять первым исполнительным элементом (62) и вторым исполнительным элементом (52, 56) таким образом, что общий коэффициент полезного действия гидравлического насоса (18) и гидромотора (26, 28) является максимальным.(71)(73) Заявитель и патентовладелец: ДИР ЭНД КОМПАНИ (US) 017546 Изобретение относится к системе привода рабочего транспортного средства с двигателем внутреннего сгорания, находящимся в приводном соединении с двигателем внутреннего сгорания гидравлическим насосом, у которого вытеснение текучей среды является изменяемым посредством первого исполнительного элемента, связанным с гидравлическим насосом с возможностью передачи гидравлической жидкости гидромотором, у которого вытеснение текучей среды является изменяемым посредством второго исполнительного элемента и который находится в приводном соединении с движителем, находящимся в контакте с землей, и управляющим устройством, которое связано с первым исполнительным элементом, вторым исполнительным элементом и выполненным с возможностью формирования сигнала номинальной скорости устройством задания скорости и приводится в действие, чтобы управлять первым исполнительным элементом и вторым исполнительным элементом таким образом, что движитель приводится в движение с номинальной скоростью, задаваемой устройством задания скорости. Также изобретение относится к способу для приведения в действие системы привода. Во многих рабочих транспортных средствах, таких как сельскохозяйственные транспортные средства и уборочные машины, используются гидравлические приводы. Они включают в себя приводимый двигателем внутреннего сгорания гидравлический насос и связанный с насосом с возможностью передачи гидравлической жидкости гидравлический двигатель (гидромотор), который приводит в движение колесо или несколько колес. В некоторых транспортных средствах колеса передней или задней оси гидравлически приводятся, соответственно, по меньшей мере одним гидромотором, согласованным с осью или колесами. Система привода вышеназванного типа описана в DE 10211799 A. Поворотная пластина регулируемого гидравлического насоса регулируется посредством исполнительного элемента и управляющего им средства управления в зависимости от положения перемещаемой оператором рукоятки регулирования подачи топлива, так что вырабатывается гидравлический поток, увеличивающийся в соответствии с заданной оператором скоростью. Два регулируемых гидромотора согласованы, соответственно, с передней или задней осью и включают в себя также поворотные пластины, перемещаемые исполнительным элементом, связанным со средством управления. Положение поворотных пластин гидромоторов управляется на основе выходного числа оборотов гидромоторов и разности давлений между впуском и выпуском,так что в случае проворачивания колес или вращения колес назад, противоположно желательному направлению, можно соответственно управлять противоположным образом. В качестве недостатка системы привода согласно DE 10211799 A может рассматриваться то, что коэффициент полезного действия (КПД) гидравлической коробки передачи, состоящей из гидравлического насоса и гидромотора, относительно плохой особенно в нижем диапазоне скоростей. В DE 10350308 A описан способ выбора числа оборотов двигателя и передаточного отношения в бесступенчатой гидростатической коробке передач с распределением мощности, которая включает в себя гидростатическую передачу с блоком постоянного объема и блоком регулируемого объема, а также суммирующую передачу и передачу с задним делителем с несколькими переключаемыми передачами, причем введенная в коробку передач мощность разветвляется на гидростатическую передачу и на передачу с задним делителем и объединяется в суммирующей передаче. Число оборотов двигателя и передаточное число коробки передач с распределением мощности автоматически регулируются таким образом, что при желательной скорости обеспечивается оптимальный общий КПД. Описываемая здесь коробка передач включает в себя только регулируемый гидравлический элемент (насос или мотор), так что регулировка числа оборотов двигателя внутреннего сгорания должна возвращаться назад, чтобы выполнить два условия (достижение желательной скорости и достижение наилучшего возможного коэффициента полезного действия). Поэтому такое устройство не пригодно для самоходных уборочных машин, у которых двигатель внутреннего сгорания приводится, по меньшей мере, в режиме уборки с постоянным заданным числом оборотов. Кроме того, в противоположность коробке передач данного типа в применяемой здесь гидростатической коробке передач с разделением мощности предусмотрено чисто механическое разветвление. Лежащая в основе изобретения задача усматривается в том, чтобы предоставить улучшенную систему привода рабочего транспортного средства, которая не имеет названных недостатков. Эта проблема решается в соответствии с изобретением посредством решения согласно пп.1 и 7 формулы изобретения, причем в остальных пунктах формулы изобретения приведены признаки, которые предпочтительным образом далее развивают это решение. Система привода рабочего транспортного средства, в частности самоходной уборочной машины,содержит двигатель внутреннего сгорания. Двигатель внутреннего сгорания приводит гидравлический насос непосредственно или опосредованным способом, то есть через включенные между ними механические, гидравлические или любые другие передачи. Гидравлический насос находится в соединении через гидролинию с гидромотором, который механически приводит находящийся в контакте с землей движитель, в частности колесо или гусеничный движитель. Вытеснения текучей среды гидравлического насоса и гидромотора регулируются первым исполнительным элементом и, соответственно, вторым исполнительным элементом. Управляющее устройство связано с обоими исполнительными элементами и устройством задания скорости, которое обеспечивает сигнал номинальной скорости, который содержит ин-1 017546 формацию о желательной номинальной скорости, с которой должно приводиться в движение рабочее транспортное средство. Устройство задания скорости может приводиться в действие оператором или оно работает автоматически, чтобы, например, реализовать постоянную производительность уборки. Управляющее устройство имеет две степени свободы, чтобы достичь номинальной скорости, а именно положения исполнительных элементов, которыми изменяются вытеснения текучей среды гидравлического насоса и гидромотора. Одна из степеней свободы соответствует желательной номинальной скорости, в то время как настоящее изобретение предлагает другую степень свободы использовать таким образом, чтобы достигался оптимальный (т.е. максимальный) общий КПД гидравлической передачи, состоящей из гидравлического насоса и гидромотора. Таким способом получают улучшение КПД системы привода и уменьшение расхода топлива. В дальнейшем развитии изобретения предложено управляющее устройство дополнительно соединить со средством управления двигателя внутреннего сгорания. Управляющее устройство изменяет также число оборотов двигателя внутреннего сгорания таким образом, что КПД всей системы привода,включая двигатель внутреннего сгорания, оптимизируется. В качестве другого входного параметра может при этом служить определение выдаваемого гидромотором вращающего момента посредством датчика вращающего момента, которое может использоваться для определения числа оборотов двигателя внутреннего сгорания, которое наиболее подходит для предоставления требуемого вращающего момента или производительности. Это изменение числа оборотов двигателя внутреннего сгорания особенно целесообразно в режиме движения по проезжей части, который распознается с помощью переключателя, выполненного с возможностью переключения между режимом полевых работ и режимом движения по проезжей части. Напротив, в режиме полевых работ, как правило, целесообразно поддерживать оператором (или автоматическим управлением, основанным на соответствующих значениях датчика, например, для соответствующей производительности уборки урожая) число оборотов двигателя внутреннего сгорания жестко заданным и постоянным, чтобы предоставить подходящие числа оборотов для рабочих агрегатов рабочей машины, таких как молотильные аппараты и сепараторы для зерноуборочных комбайнов или измельчители и транспортеры для силосоуборочных комбайнов. Коэффициент полезного действия гидравлических насосов и гидромоторов зависит, в особенности,от разности давлений между впуском и выпуском, которая, в свою очередь, находится во взаимосвязи с вытеснением текучей среды, заданным соответствующим исполнительным механизмом путем регулировки поворотной пластины. В общем, КПД гидравлической передачи повышается с повышением давления до значения, специфического для гидравлического насоса или, соответственно, гидромотора. Поэтому предоставляется возможность подавать команды на гидравлический насос и гидромотор соответственно этим значениям, так что они работают с наилучшим КПД, при этом управляющее устройство соединяется с датчиком давления, выполненным с возможностью определения давления, существующего с выходной стороны на гидравлическом насосе, и исполнительные элементы регулируются таким образом,что на датчике давления достигается такое давление, при котором общий КПД гидравлического насоса и гидромотора является максимальным. Это давление может сохраняться в запоминающем устройстве связанном с управляющим устройством. Соответственно, вытеснение текучей среды, исходя из максимального вытеснения текучей среды, уменьшается до тех пор, пока не наступит оптимальное давление. Аналогичным образом, оно, исходя из слишком малого вытеснения текучей среды, которое обусловливает большее, чем оптимальное, давление, увеличивается, пока не будет достигнуто оптимальное давление. Это оптимальное давление может зависеть от желательного числа оборотов гидромотора, так что число оборотов гидромотора или номинальная скорость могут использоваться для выбора подлежащего регулированию давления. Для этого в запоминающем устройстве управляющего устройства могут сохраняться и вызываться из него подходящие кривые, формулы или таблицы. Кроме того, предложено определять вращающий момент, отдаваемый гидромотором, посредством датчика вращающего момента. Тем самым становится возможным распознавать ситуации, в которых предоставленное гидравлическим насосом давление уже недостаточно, чтобы предоставлять вращающий момент на выходе гидравлического насоса. В подобных случаях, в которых измеренный вращающий момент превышает пороговое значение, управляющее устройство побуждает первый и второй исполнительные элементы повысить вытеснения текучей среды гидравлического насоса и гидромотора, чтобы иметь возможность (в общем случае ценой КПД) предоставить необходимый вращающий момент. Угол поворота гидравлического насоса может регулироваться до максимально возможного значения или некоторого лежащего ниже значения, которое, однако, достаточно для предоставления требуемого вращающего момента и обеспечивает лучший КПД, чем максимальный угол поворота. На чертежах представлен описываемый далее более подробно пример выполнения изобретения. На чертежах показано следующее: фиг. 1 - схема соответствующей изобретению системы привода и фиг. 2 - блок-схема алгоритма, в соответствии с которой работает управляющее устройство, показанное на фиг. 1. На фиг. 1 схематично представлен вариант выполнения соответствующей изобретению системы-2 017546 привода. Рабочее транспортное средство 8 имеет (не показано) раму или самонесущее шасси, которое опирается на передние движители 10 и задние движители 12 в форме колес, которые находятся в контакте с землей. Задние движители 12, как правило, являются управляемыми, в то время как передние движители 10 имеют больший диаметр, чем задние движители 12, и служат опорой для большей части веса рабочего транспортного средства 8, в частности, если речь идет об уборочной машине в форме зерноуборочного комбайна или самоходного силосоуборочного комбайна. Система привода включает в себя двигатель 14 внутреннего сгорания в форме дизельного двигателя. Через вал 16 двигатель 14 внутреннего сгорания приводит в действие гидравлический насос 18, вытеснение текучей среды в котором является изменяемым посредством поворотного диска 20, положение которого механически регулируется посредством первого исполнительного элемента 62. Гидравлический насос 18 имеет выпуск, который посредством трубопроводов 24 соединен с впуском первого гидромотора 26 и с впуском второго гидромотора 28. Выпуск гидравлического насоса 18 посредством трубопроводов 30 соединен с выпуском первого гидромотора 26 и с выпуском второго гидромотора 28. Двигатель 14 внутреннего сгорания также приводит в действие, если рабочее транспортное средство 8 является самоходной уборочной машиной, его механизмы обработки собранного урожая. Первый гидромотор 26 приводит в движение через первый приводной вал 32 и первую самоблокирующуюся дифференциальную передачу 34 оба задних колеса 12. Второй гидромотор 28 приводит в движение через второй приводной вал 36 и вторую самоблокирующуюся дифференциальную передачу 38 оба передних колеса 10. Первый гидромотор 26 может избирательно включаться и выключаться, так что привод на четыре колеса может выбираться только в особых ситуациях эксплуатации, в которых требуется лучшая тяговая способность. Между вторым гидромотором 28 и второй дифференциальной передачей 38 может иметься механизм переключения с различными выбираемыми передаточными ступенями, который на фиг. 1 не представлен из соображений наглядности. Управляющее устройство 40 соединено с первым датчиком 42 числа оборотов, вторым датчиком 44 числа оборотов и первым датчиком 46 давления. Первый датчик 42 числа оборотов размещен рядом с первым приводным валом 32 и при каждом обороте (или многократно в течение одного оборота) первого приводного вала 32 выдает импульс. Он может представлять собой оптический или магнитный датчик,который взаимодействует с соответствующими маркировками или постоянными магнитами, которые закреплены на первом приводном валу 32. Второй датчик 44 числа оборотов размещен рядом со вторым приводным валом 36 и при каждом обороте (или многократно в течение одного оборота) второго приводного вала 36 выдает импульс. Он может представлять собой оптический или магнитный датчик, который взаимодействует с соответствующими маркировками или постоянными магнитами, которые закреплены на втором приводном валу 36. Датчик 46 давления размещен во внутреннем пространстве первого гидромотора 26 и определяет давление, которое приложено на впуске первого гидромотора 26. Датчик 48 положения рукоятки регулирования подачи топлива определяет положение рукоятки 22 регулирования подачи топлива, размещенной на рабочем месте оператора рабочего транспортного средства 8. Датчик 48 положения рукоятки регулирования подачи топлива определяет текущее положение рукоятки 22 регулирования подачи топлива оптическим или магнитным способом. Управляющее устройство 40 связано со вторым электромеханическим исполнительным элементом 52, который выполнен с возможностью регулирования поворотного диска 54 первого гидромотора 26. Информация о положении исполнительного элемента 52 может подаваться назад на управляющее устройство 40. Если в качестве исполнительного элемента 52 применяется шаговый двигатель, то такая обратная связь не нужна. Она также в принципе не требуется, так как определяется рабочее состояние первого гидромотора 26. Управляющее устройство 40 получает от второго датчика 44 числа оборотов измеренное значение относительно числа оборотов передних колес 10. Кроме того, управляющее устройство 40 получает от первого датчика 42 числа оборотов информацию относительно числа оборотов задних колес 12. Также второй гидромотор 28 имеет вытеснение текучей среды, изменяемое посредством второго электромеханического исполнительного элемента 56 и регулируемого поворотного диска 58, и ему поставлен в соответствие второй датчик 60 давления, который измеряет давление на впуске второго гидромотора 28. Управляющее устройство 40 связано с датчиком 60 давления и исполнительным элементом 56. Кроме того, для регулирования поворотного диска 20 гидравлического насоса 18 предусмотрен первый исполнительный элемент 62, который работает электромеханически или электрогидравлически и управляется посредством управляющего устройства 40. Также возможно подать на управляющее устройство 40 дополнительно информацию о соответствующем положении первого исполнительного элемента 62. Однако подобная обратная связь не является обязательно необходимой, так как может применяться шаговый двигатель и так как управляющему устройству также вследствие обратной связи, в частности через датчики 42, 44 числа оборотов и датчики 46, 60 давления, подается информация о рабочем состоянии гидравлического насоса 18. Управляющее устройство 40 получает от датчика 48 положения рукоятки регулирования подачи топлива сигнал номинальной скорости относительно положения (служащей в качестве устройства задания скорости) рукоятки 22 регулирования подачи топлива.-3 017546 С двигателем 14 внутреннего сгорания согласована связанная с управляющим устройством 40 система 64 управления двигателем, которая определяет число оборотов двигателя 14 внутреннего сгорания. Связанный с управляющим устройством 40 переключатель 66 служит для перевода между режимом эксплуатации на поле (положение F) и режимом движения по дороге (положение S). Наконец, управляющее устройство 40 связано с запоминающим устройством 68 и двумя датчиками 70, 72 вращающего момента,которые определяют вращающий момент на валах 32 и, соответственно, 36. Ниже описан способ работы управляющего устройства 40 системы привода рабочего транспортного средства 8, как представлено на фиг. 2. Если после запуска (этап 100) переключатель 66 находится в положении для режима эксплуатации в поле (этап 102), то управляющее устройство 40 побуждает двигатель 14 внутреннего сгорания, посредством системы 64 управления двигателем, вращаться с постоянным числом оборотов, которое может быть задано оператором посредством непоказанной на чертеже рукоятки управления (этап 104). Управляющее устройство 40 побуждает затем первый исполнительный элемент 62 переместить поворотную пластину 20 гидравлического насоса 18 в первое положение максимального вытеснения текучей среды, в то время как вторые исполнительные элементы 52, 56 перемещают поворотные пластины гидромоторов 26, 28 в положение, зависимое от сигнала номинальной скорости с датчика 48 положения рукоятки регулирования подачи топлива (этап 106). Рабочая машина 8 в соответствии с этим движется в направлении движения вперед или назад. Управляющее устройство 40 определяет измеренные значения датчиков 70, 72 вращающего момента и сравнивает их с пороговым значением, сохраненным в запоминающем устройстве 68 (этап 108). Если одно из значений вращающего момента превышает пороговое значение, то прежде всего не производится никакой дальнейшей регулировки исполнительных элементов 52, 56, 62, а процесс вновь повторяется (этап 106). Если вращающие моменты на валах 32, 36 не достигают порогового значения, то существует возможность установить поворотные диски 20, 54 и 58 на меньшие углы поворота, которые обеспечивают возможность лучшего КПД гидравлической передачи. Затем первый исполнительный элемент 62 побуждается к тому, чтобы регулировать поворотный диск 20 гидравлического насоса 18 в направлении меньшего вытеснения текучей среды, а вторые исполнительные элементы 52, 56 побуждаются управляющим устройством 40 к тому, чтобы поворотные диски 54, 58 гидроприводов 26, 28 также регулировать в направлении меньшего вытеснения текучей среды (этап 110). Это регулирование осуществляется до тех пор, пока давления, определяемые датчиками 46, 60 давления, не будут соответствовать оптимальному значению, которое соответствует максимальному КПД гидравлической передачи и сохранено в запоминающем устройстве 68 (этап 112). Аналогичным образом, управляющее устройство 40 может в данном месте побуждать исполнительные элементы 62, 52, 56 к тому, чтобы перемещать поворотные диски 20,54, 58 в направлении большего вытеснения текучей среды, если давление, определяемое датчиками 46,60 давления, будет больше, чем оптимальное давление, и КПД в соответствии с этим также будет неоптимальным. Во время этих регулировок число оборотов на валах 32, 36 должно оставаться постоянным, что контролируется управляющим устройством 40 посредством датчиков 42, 44 числа оборотов и, если необходимо, подстраивается посредством исполнительных элементов 52, 56 (этап 114). В соответствии с этим КПД гидравлической передачи оптимизируется. Описанные процессы регулирования повторяются регулярным образом, например каждые 0,1 с (с этапа 108). Если переключатель 66 установлен в положение режима движения по дороге (этап 102), то управляющее устройство 40 дополнительно контролирует и изменяет число оборотов двигателя 14 внутреннего сгорания посредством системы 64 управления двигателем. При этом, соответственно, определяется нагрузка двигателя 14 внутреннего сгорания на основе его числа оборотов (и/или на основе измеренного значения датчиков 70, 72 вращающего момента) и устанавливается на значение, при котором общий КПД системы привода, включая двигатель 14 внутреннего сгорания и гидравлическую передачу, максимален (этап 116). При этом поворотные диски 20, 54 и 56 регулируются способом, описанным для режима эксплуатации в поле (этап 106 и далее). ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Самоходная уборочная машина, содержащая двигатель (14) внутреннего сгорания,находящийся в приводном соединении с двигателем (14) внутреннего сгорания гидравлический насос (18), у которого вытеснение текучей среды является изменяемым посредством первого исполнительного элемента (62),связанный с гидравлическим насосом (18) с возможностью передачи гидравлической жидкости гидромотор (26, 28), у которого вытеснение текучей среды является изменяемым посредством второго исполнительного элемента (52, 56) и который находится в приводном соединении по меньшей мере с одним движителем (10, 12), находящимся в контакте с землей,и управляющее устройство (40), которое связано с системой (64) управления двигателем (14) внутреннего сгорания, первым исполнительным элементом (62), вторым исполнительным элементом (52, 56),-4 017546 выполненным с возможностью определения существующего с выходной стороны на гидравлическом насосе (18) давления датчиком (46, 60) давления и выполненным с возможностью формирования сигнала номинальной скорости устройством (22) задания скорости и которое выполнено с возможностью приведения в действие, чтобы управлять первым исполнительным элементом (62) и вторым исполнительным элементом (52, 56) таким образом, что движитель (10, 12) приводится в движение с номинальной скоростью, задаваемой устройством (22) задания скорости,причем управляющее устройство (40) выполнено с возможностью приведения в действие таким образом, чтобы побуждать исполнительные элементы (62, 52, 56) перемещать поворотные диски (20, 54,58) гидравлического насоса (18) и гидромотора (26, 28) исходя из максимального вытеснения текучей среды гидравлического насоса (18) и зависящего от сигнала номинальной скорости положения второго исполнительного элемента (52, 56) в направлении менее значительного вытеснения текучей среды до тех пор, пока давления, определенные посредством датчиков (46, 60) давления, не станут соответствовать оптимальному значению, которое соответствует максимальному общему коэффициенту полезного действия гидравлической передачи и записано в связанном с устройством (40) управления запоминающем устройстве (68),управляющее устройство (40) связано с переключателем (66) для переключения между режимом работы в поле и режимом движения по проезжей части,и при этом управляющее устройство (40) и система (64) управления двигателем выполнены так, что число оборотов двигателя (14) внутреннего сгорания при установленном на режим работы в поле переключателе (66) может быть жестко задано либо оператором, либо основанным на значениях датчика для соответствующей производительности уборки урожая автоматическим управлением и является постоянным, чтобы предоставить подходящие числа оборотов для рабочих агрегатов уборочной машины, в то время как устройство (40) управления при установленном на режим движения по проезжей части переключателе (66) приводится в действие, чтобы также варьировать число оборотов двигателя (14) внутреннего сгорания для достижения максимального общего коэффициента полезного действия системы привода. 2. Самоходная уборочная машина по п.1, отличающаяся тем, что управляющее устройство (40) связано с датчиком (70, 72) вращающего момента, выполненным с возможностью определения отдаваемого гидромотором (26, 28) вращающего момента, и приводится в действие, чтобы побуждать первый и второй исполнительные элементы (62, 52, 56) увеличивать вытеснения текучей среды гидравлического насоса (18) и гидромотора (26, 28), когда сигнал датчика (70, 72) вращающего момента превышает пороговое значение, и/или наоборот. 3. Самоходная уборочная машина по п.1 или 2, выполненная в виде зерноуборочного комбайна или силосоуборочного комбайна.
МПК / Метки
МПК: B60K 6/00, F16H 61/42, F16H 39/02
Метки: средства, привода, транспортного, рабочего, система
Код ссылки
<a href="https://eas.patents.su/7-17546-sistema-privoda-rabochego-transportnogo-sredstva.html" rel="bookmark" title="База патентов Евразийского Союза">Система привода рабочего транспортного средства</a>
Система для определения давления в шине транспортного средства и / или скорости транспортного средства
Номер патента: 14154
Опубликовано: 29.10.2010
Авторы: Пингель Ульрих, Пингель Мартин
МПК: G01L 17/00
Метки: скорости, средства, транспортного, определения, давления, шине, система
Формула / Реферат:
1. Система для определения давления в установленной на транспортном средстве пневматической шине транспортного средства и/или скорости транспортного средства, содержащаясистему датчиков нагрузки, которая выдает силовой сигнал для двумерного образа распределения сил, действующих со стороны шины транспортного средства при контакте с датчиками при перемещении транспортного средства через систему;компьютер, который запрограммирован таким образом,...
Система управления сельскохозяйственного или промышленного транспортного средства и способ эксплуатации системы управления
Номер патента: 7823
Опубликовано: 27.02.2007
Авторы: Зоботцик Йоахим, Кнеер Бернд, Райнардс Марко, Тарасинский Николай
МПК: B60K 6/04, B60K 31/00, B60K 17/356...
Метки: способ, промышленного, сельскохозяйственного, средства, системы, управления, эксплуатации, транспортного, система
Формула / Реферат:
1. Система управления для сельскохозяйственного или промышленного транспортного средства, в частности трактора, причем для каждой полуоси моста, предпочтительно переднего моста (20), транспортного средства (10) предусмотрен электрический привод (22, 24), при помощи которого приводится по меньшей мере одно соединенное с соответствующей полуосью колесо (26), причем электропривод (22, 24) управляется таким образом, что от электропривода (22, 24)...
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства
Номер патента: 6782
Опубликовано: 28.04.2006
Автор: Сухолитко Валентин Афанасьевич
Метки: бедствие, поддержки, оператора, терпящего, средства, транспортного, определения, способ, местоположения
Формула / Реферат:
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства, заключающийся в том, что формируют базу знаний по набору возможных программ, а также по результатам анализа и опыта исследований аварий и катастроф с помощью экспертной системы оценивают работоспособность оператора транспортного средства, бортового оборудования транспортного средства и работу оператора, прогнозируют аварийные...
Система дистанционного управления для транспортного средства.
Номер патента: 298
Опубликовано: 29.04.1999
Автор: Кеннет Е.Флик
МПК: E05B 49/00, B60R 25/10
Метки: управления, система, транспортного, дистанционного, средства
Формула / Реферат:
1. Система дистанционного управления (10) для транспортного средства, содержащая, по меньшей мере, один уникально закодированный дистанционный передатчик (50), средство проверки дистанционного передатчика, приемник (13), расположенный внутри транспортного средства для приема сигнала, по меньшей мере, от одного уникально закодированного дистанционного передатчика; и средство обучения дистанционного передатчика (47), оперативно подключаемое к...
Система мониторинга состояния колес рельсового транспортного средства и управления противоюзным устройством
Номер патента: 16570
Опубликовано: 30.05.2012
Авторы: Алехин Анатолий Анатольевич, Горюнов Павел Валерьевич
МПК: B61K 9/04, B60T 17/18
Метки: рельсового, противоюзным, средства, устройством, колес, мониторинга, состояния, управления, система, транспортного
Формула / Реферат:
1. Система мониторинга состояния колес рельсового транспортного средства и управления противоюзным устройством, размещенная на тележке транспортного средства, включающая в себяопоры с датчиками и механизмами, расположенными в непосредственном контакте с каждым из колес;тела вращения, подпружиненные и прижатые к ободу каждого из колес транспортного средства и приводимые во вращение от движения колес;датчики линейных перемещений, соединенные с...
Предыдущий патент: Циклические анилино-пиридинотриазины в качестве ингибиторов gsk-3
Следующий патент: Система и способ получения хлорбензола (варианты)
Случайный патент: Способ получения аминокротонильных соединений и лекарственное средство