Приспособление для захвата заготовок транспортирующего устройства формующей машины
Формула / Реферат
1. Приспособление для захвата заготовок транспортирующего устройства формующей машины, содержащее привод и по меньшей мере один соединенный с приводом захват (1), имеющий две неперекрещивающиеся захватные руки (11, 12), которые выполнены с возможностью отклонения друг относительно друга, причем каждая захватная рука имеет захватный конец (111, 121) для захвата заготовки (9), при этом каждая из двух захватных рук (11, 12) своим концом (114, 124), противоположным захватному концу (111, 121), шарнирно соединена с общей направляющей головкой (15), а в средней части между двумя концами - со своей собственной соединительной планкой (13, 14), причем каждая из двух соединительных планок (13, 14) выполнена с возможностью поворота вокруг неподвижной оси (130, 140), отличающееся тем, что неподвижная ось (130, 140) соединительной планки (13, 14) одной захватной руки (11, 12) установлена ближе к другой захватной руке (11, 12), чем неподвижная ось (130, 140) соединительной планки (13, 14) указанной другой захватной руки (11, 12).
2. Приспособление для захвата заготовок по п.1, отличающееся тем, что направляющая головка (15) выполнена с возможностью линейного смещения вдоль неподвижной направляющей (151, 152) так, что при повороте соединительной планки (13, 14) направляющая головка (15) линейно смещается той захватной рукой (11, 12), с которой эта соединительная планка (13, 14) шарнирно соединена, в результате чего другая захватная рука (11, 12) также смещается и благодаря ее шарнирному соединению с другой соединительной планкой (13, 14) поворачивается в противоположном направлении по сравнению с первой захватной рукой (11, 12).
3. Приспособление для захвата заготовок по п.1 или 2, отличающееся тем, что оно имеет отклоняющее устройство (17), которое прикладывает к направляющей головке (15) силу, направленную в сторону захватных концов (111, 121) захватных рук (11, 12).
4. Приспособление для захвата заготовок по любому из пп.1-3, отличающееся тем, что две захватные руки (11, 12) шарнирно соединены с общей поворотной осью (153) в направляющей головке (15).
5. Приспособление для захвата заготовок по любому из пп.1-4, отличающееся тем, что один конец (132, 142) каждой из двух соединительных планок (13, 14) установлен в неподвижном кожухе (161, 162) захвата (1) с возможностью поворота указанной соединительной планки вокруг неподвижной оси (130, 140), принадлежащей соответствующей соединительной планке (13, 14).
6. Приспособление для захвата заготовок по любому из пп.1-5, отличающееся тем, что привод представляет собой поворотный привод, который обеспечивает возможность поворота одной из соединительных планок (13, 14).
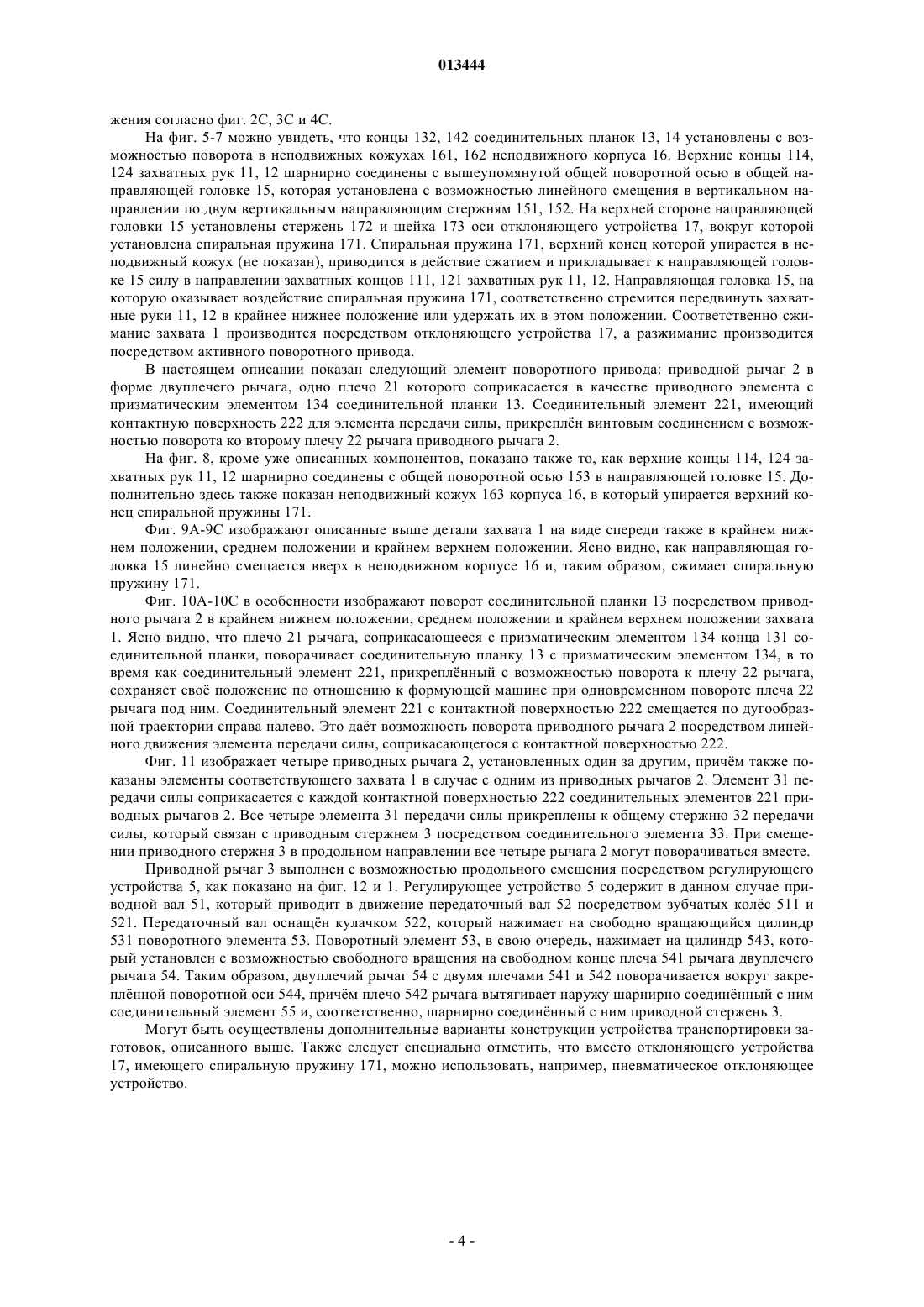
7. Приспособление для захвата заготовок по п.6, отличающееся тем, что поворотный привод имеет приводной стержень (3), выполненный с возможностью продольного смещения и соединенный с одной из соединительных планок (13, 14) посредством промежуточных элементов (2, 31, 32, 33) так, что рассматриваемая соединительная планка (13, 14) имеет возможность поворота при смещении приводного стержня (3) в продольном направлении.
8. Приспособление для захвата заготовок по любому из пп.1-7, отличающееся тем, что оно имеет множество захватов (1), расположенных один за другим, выполненных с возможностью параллельной работы посредством привода.
9. Приспособление для захвата заготовок по любому из пп.1-8, отличающееся тем, что захватные руки (11, 12) и соединительные планки (13, 14) выполнены и установлены таким образом, что при повороте соединительных планок (13, 14) из одного крайнего положения в другое захватные концы (111, 121) двух захватных рук (11, 12) сначала отклоняются друг от друга, а затем перемещаются навстречу друг другу.

Текст
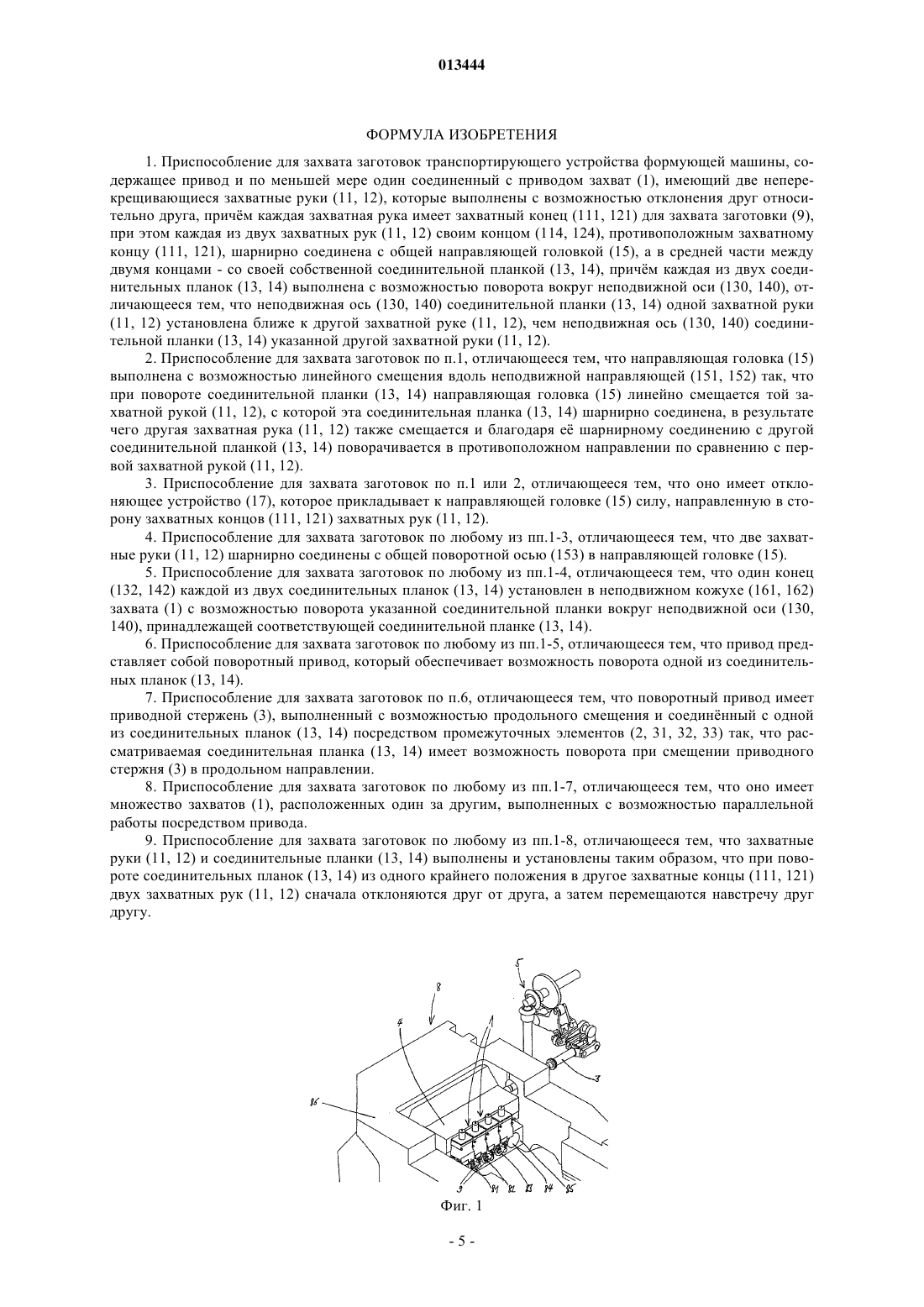
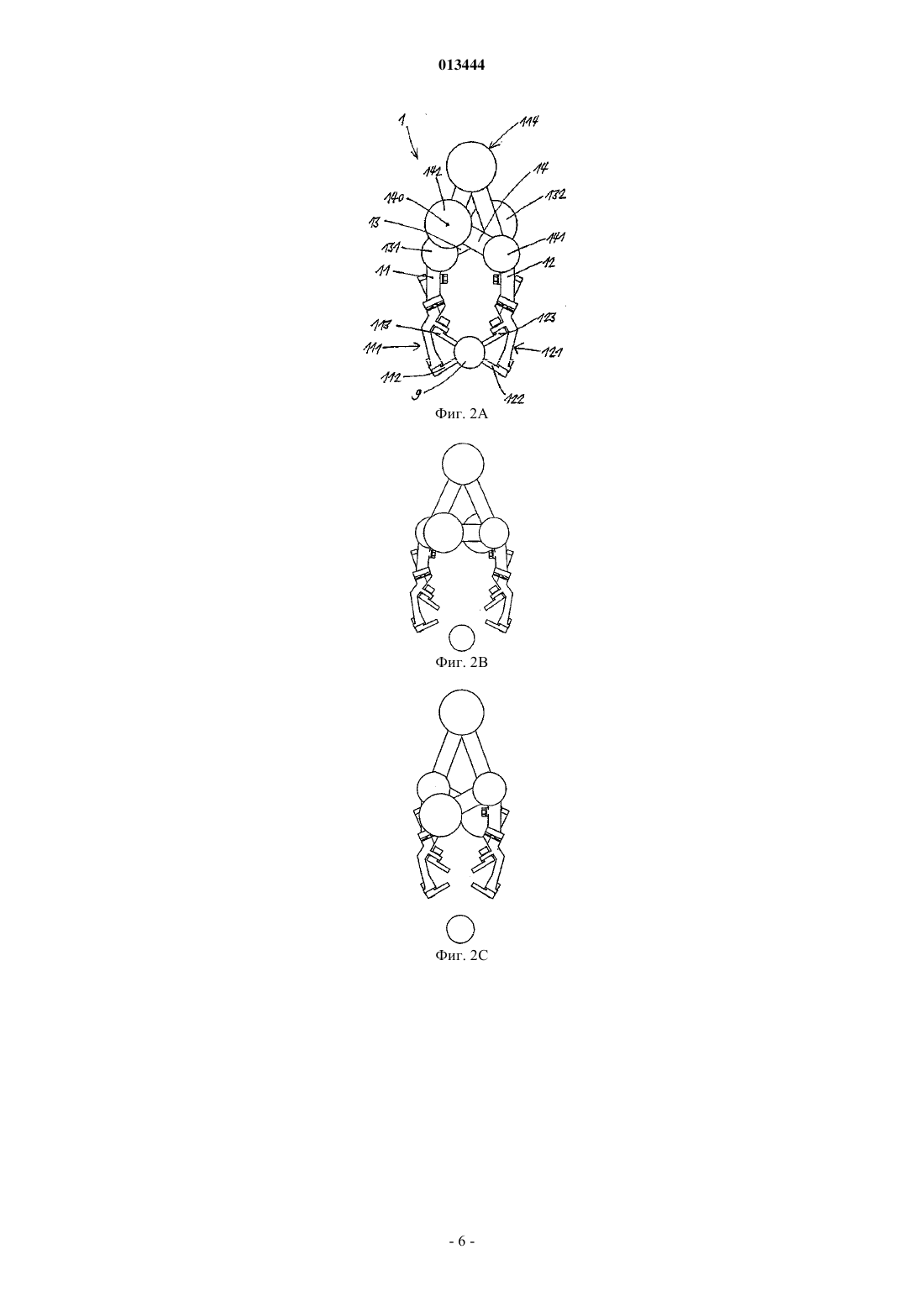
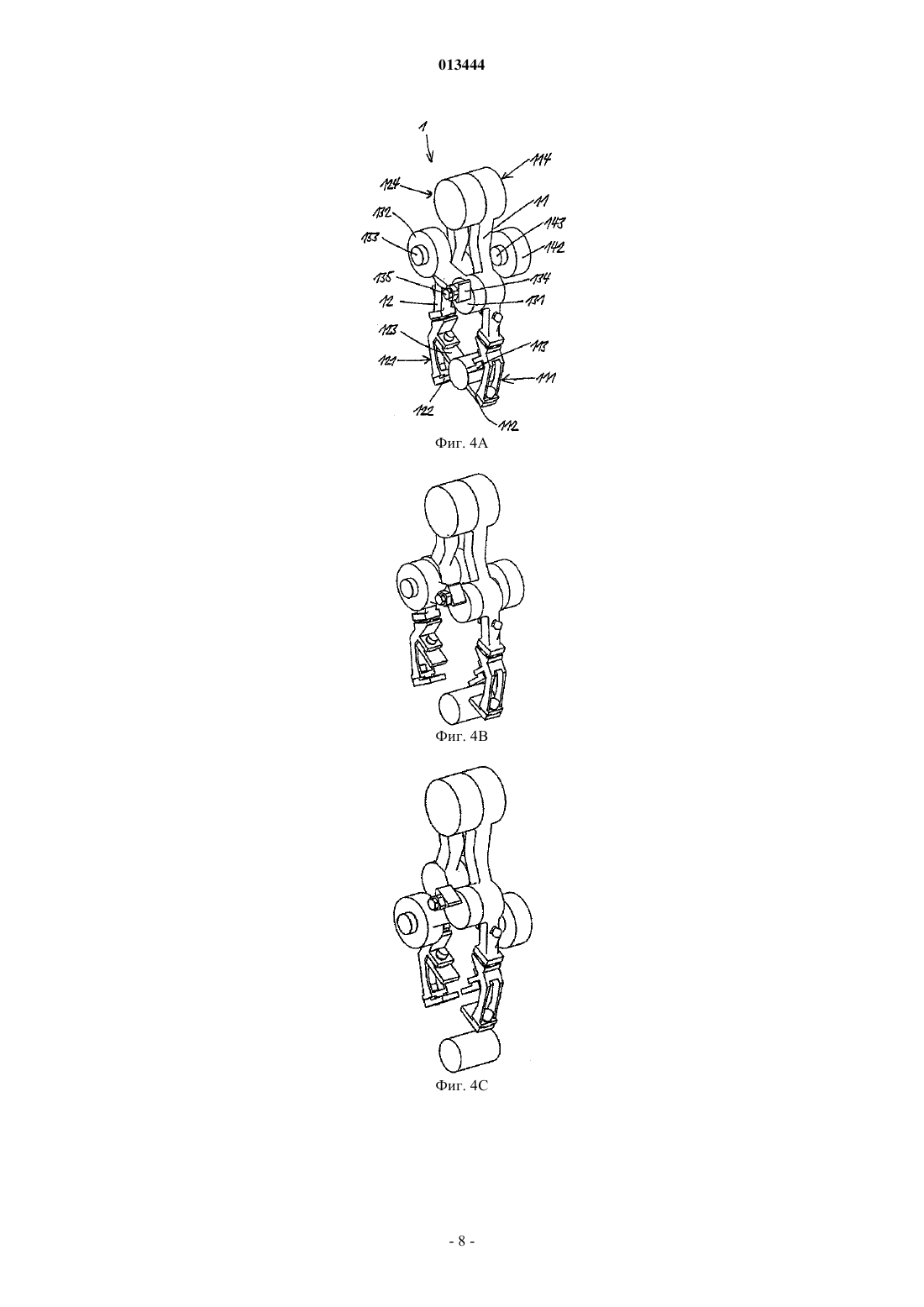
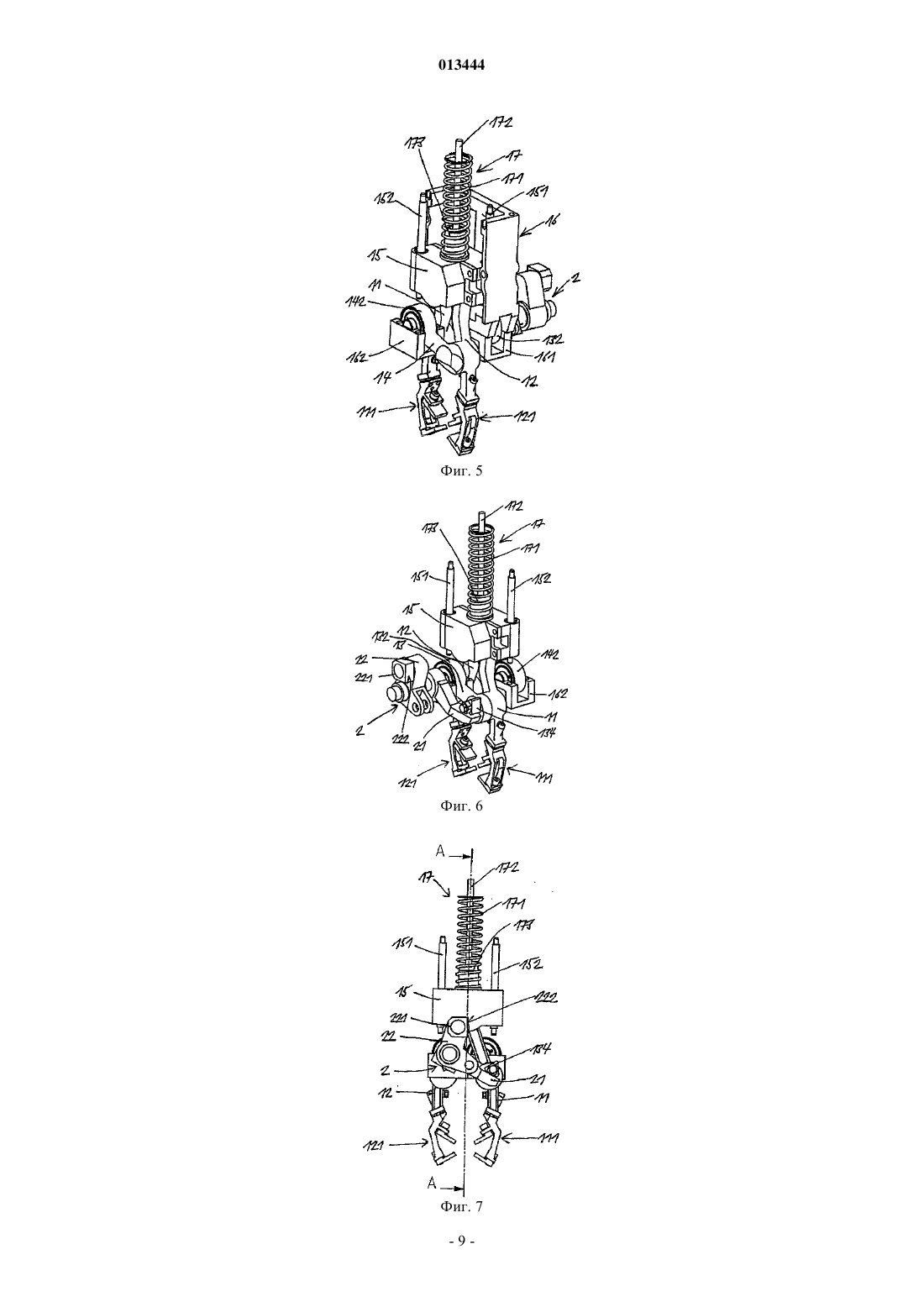
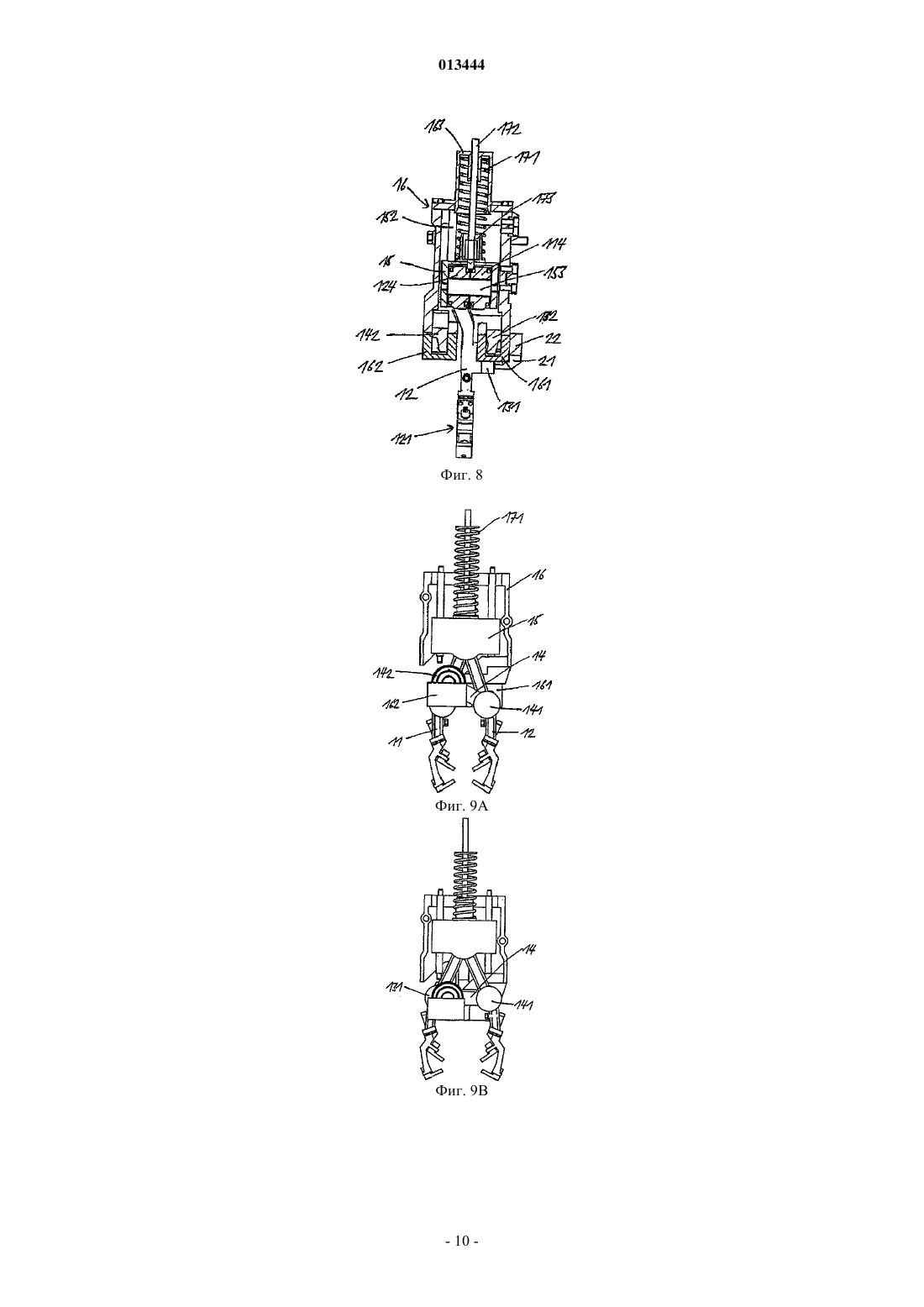
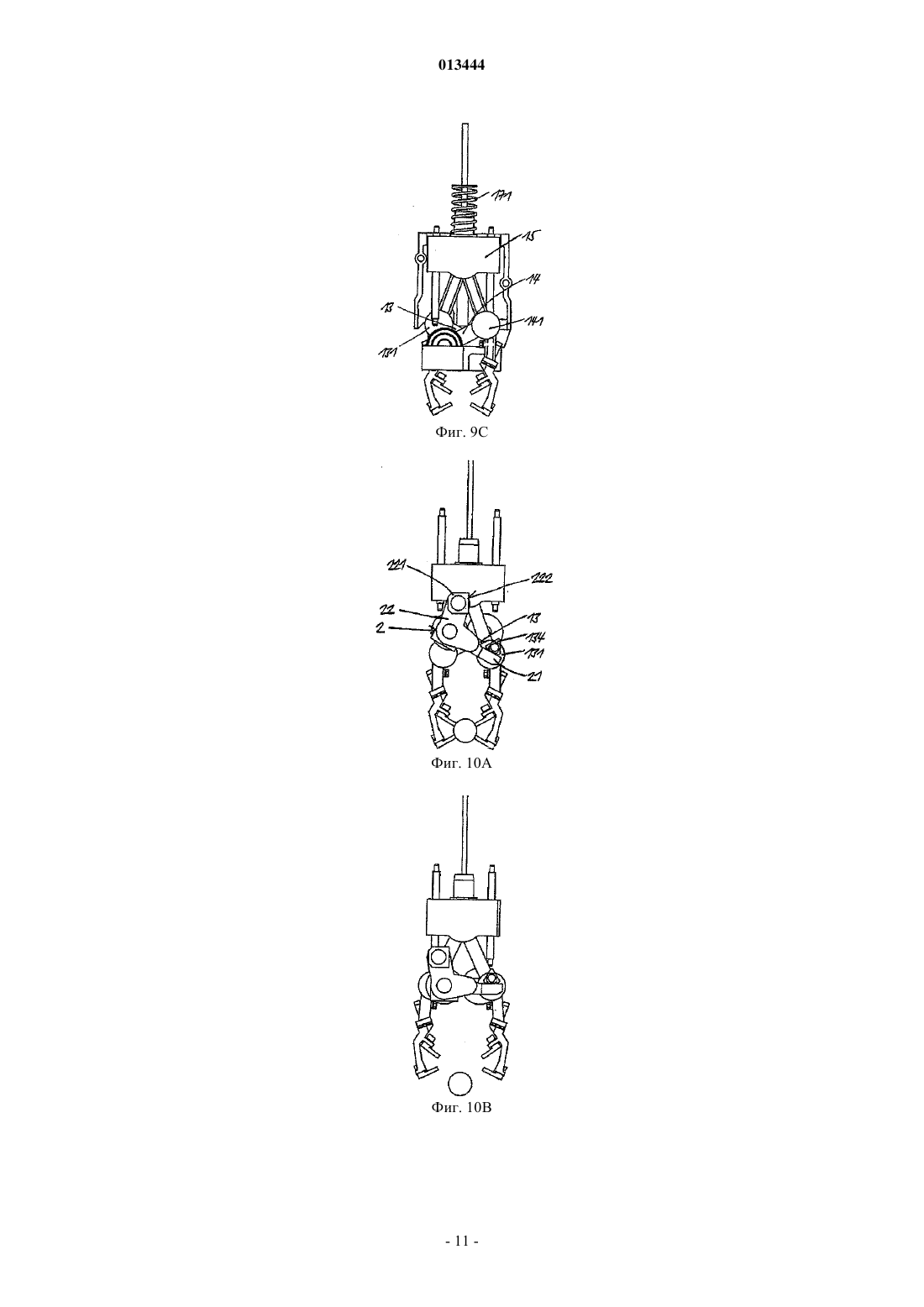
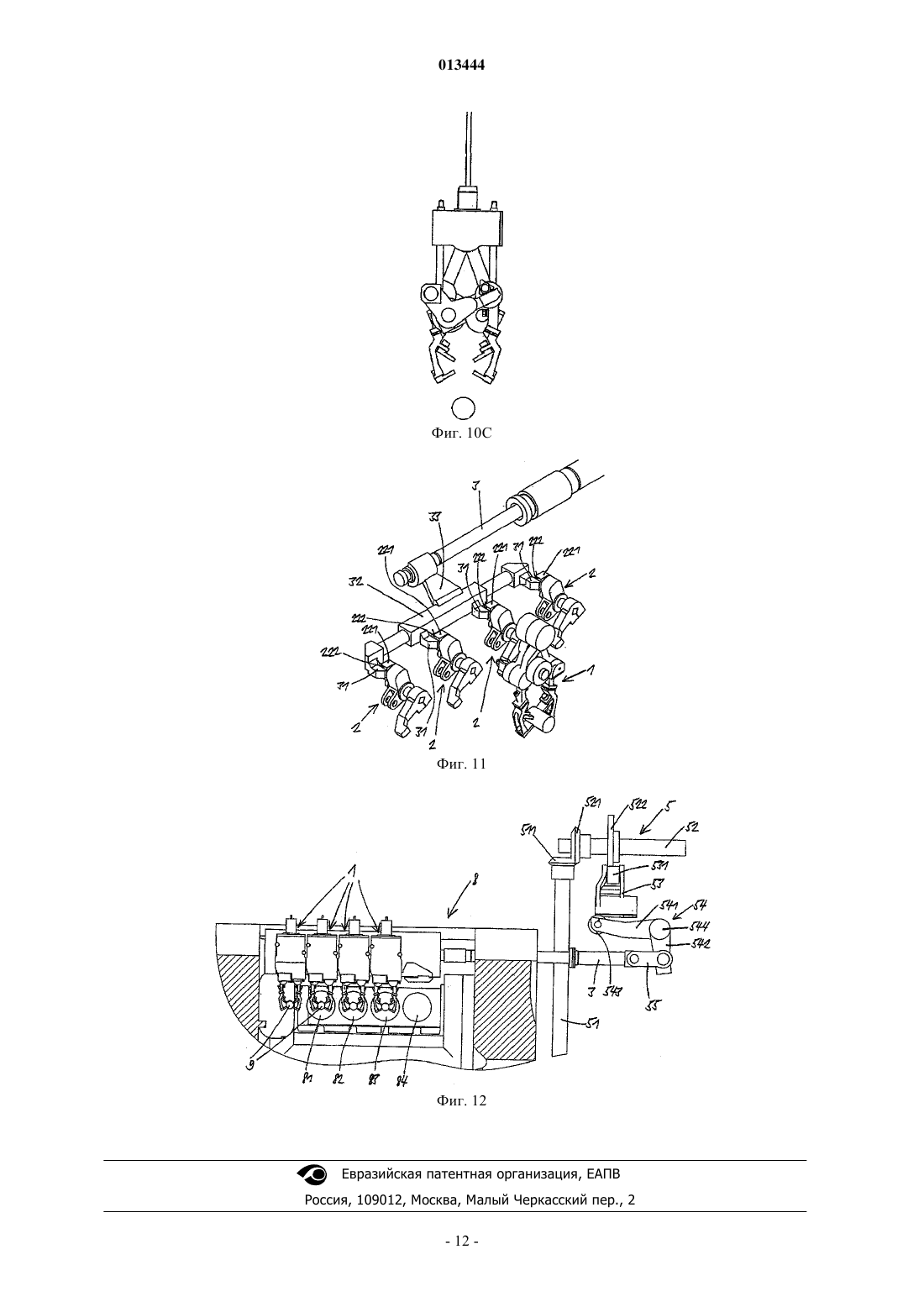
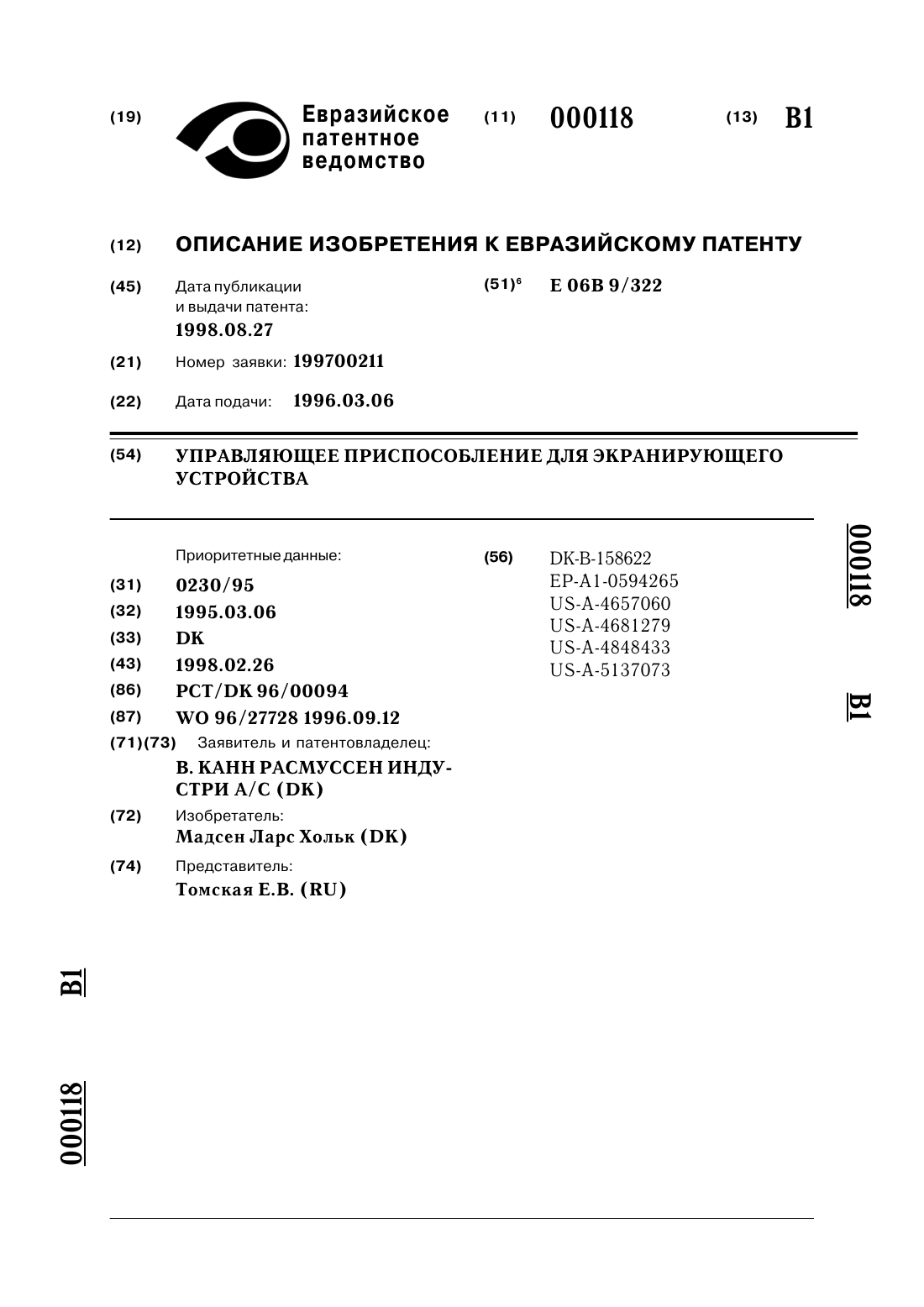
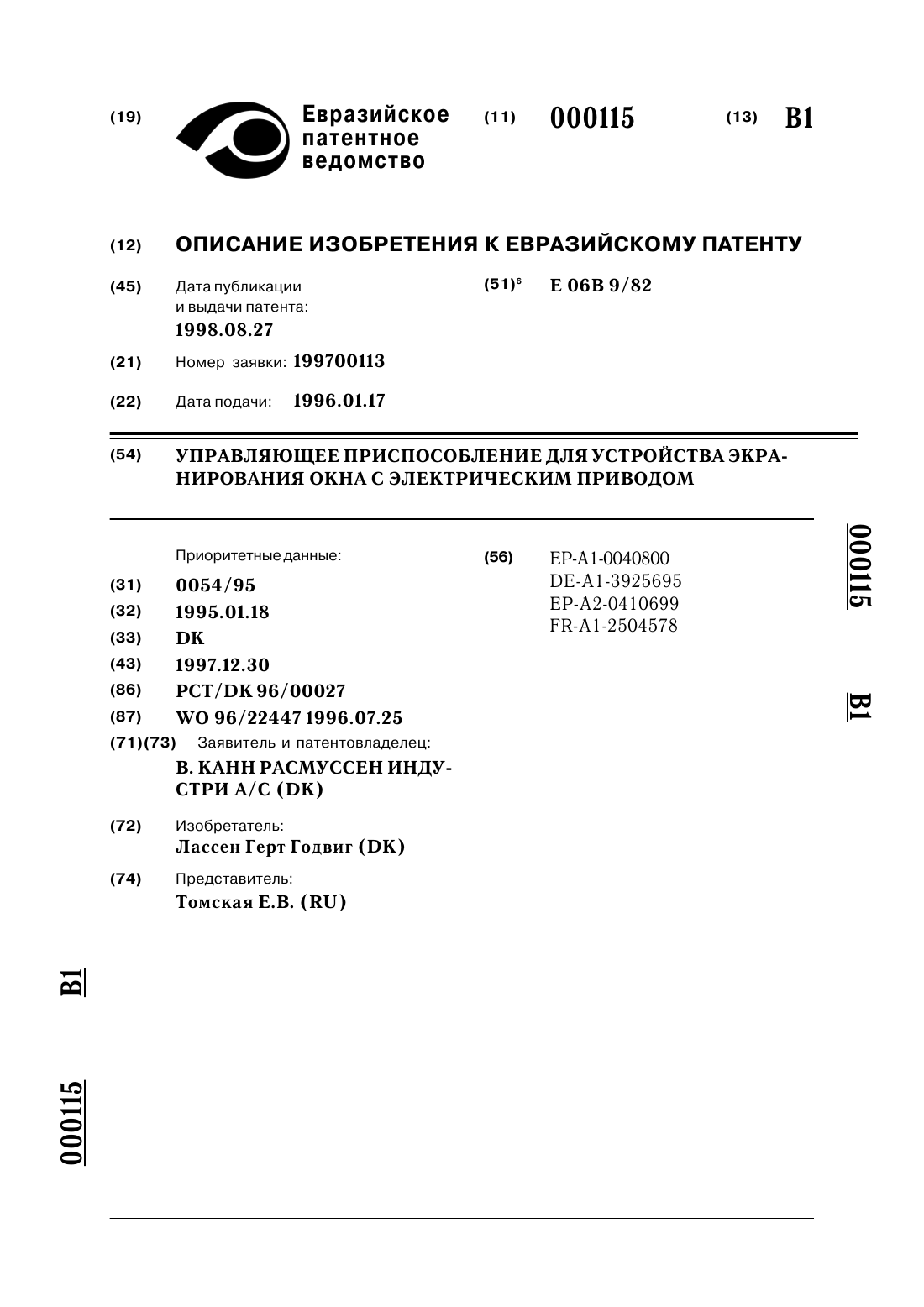
013444 Настоящее изобретение относится к приспособлению для захвата заготовок транспортирующего устройства формующей машины в соответствии с преамбулой независимого п.1 формулы. В обычно используемых на сегодняшний день формующих машинах заготовки обычно помещают на участки обработки и/или удаляют с них вновь после формовки посредством устройств транспортировки заготовок. Формующие машины для многоэтапной обработки обычно имеют множество участков обработки, установленных один за другим, в которых одну за другой обрабатывают заготовки. Транспортировка заготовки между отдельными участками обработки выполняется посредством устройства транспортировки заготовок. Известные устройства транспортировки заготовок содержат множество захватов, которыми могут быть одновременно захвачены, перенесены и вновь отпущены заготовки на отдельных участках обработки. Для этих целей захваты приводятся в движение посредством приводного механизма все вместе; в ритме машины. В качестве уровня техники приняты в расчт захваты самых различных видов. Например, вDE 3523323 А 1 описан захват, имеющий две неперекрещивающиеся захватные руки, выполненные с возможностью поворота друг относительно друга, причм каждая рука имеет захватный конец для захвата заготовки. В случае с таким захватом каждая из двух захватных рук шарнирно соединена своим концом,противоположным захватному концу, с общей направляющей головкой, а в средней части между двумя концами - со своей собственной соединительной планкой. Две соединительные планки выполнены с возможностью вращения вокруг общей неподвижной оси. При смещении вверх направляющей головки из крайнего нижнего положения захватные концы двух захватных рук отклоняются сначала друг от друга, а затем вновь навстречу друг другу, при этом одновременно поднимаясь. При смещении направляющей головки вниз из крайнего верхнего положения захватные концы двух захватных рук отклоняются сначала друг от друга, а затем вновь навстречу друг другу, при этом одновременно опускаясь. Недостаток такого захвата состоит в том, что обе захватные руки отклоняются наружу на относительно большое расстояние, так что требуется относительно большое пространство по бокам. Ввиду недостатков устройств транспортировки заготовок, известных из уровня техники, задача, которая лежит в основе настоящего изобретения, состоит в создании устройства транспортировки заготовок упомянутого в начале типа, в котором для захватных рук по меньшей мере одного захвата требуется меньше места по бокам. Эта задача решается посредством устройства транспортировки заготовок, определнного в независимом п.1 формулы. Предпочтительные варианты выполнения изобретения указаны в зависимых пунктах. Основной принцип изобретения заключается в следующем. Устройство транспортировки заготовок содержит по меньшей мере один захват, который имеет две неперекрещивающиеся захватные руки, выполненные с обеспечением возможности поворота друг относительно друга, причм каждая из рук имеет захватный конец для захвата заготовки. Каждая из двух захватных рук своим концом, противоположным захватному концу, шарнирно соединена с общей направляющей головкой, а в средней части между двумя концами - со своей собственной соединительной планкой. Каждая из двух соединительных планок выполнена с возможностью поворота вокруг неподвижной оси. Согласно изобретению неподвижная ось соединительной планки одной захватной руки установлена ближе к другой захватной руке, чем неподвижная ось соединительной планки указанной другой захватной руки. Поскольку соединительные планки двух захватных рук установлены таким образом, что они имеют возможность поворота вокруг разных неподвижных осей и, к тому же, неподвижные оси соединительных планок в каждом случае сдвинуты в сторону захватной руки, не соединнной шарнирно с соответствующей соединительной планкой, указанные две захватные руки отклоняются наружу на меньшее расстояние при отклонении друг от друга. Соответственно по меньшей мере для одного захвата требуется меньше места по бокам, чем в случае со сравнимыми устройствами транспортировки заготовок, известными из уровня техники. Направляющая головка предпочтительно выполнена с возможностью линейного смещения вдоль неподвижной направляющей так, что при повороте соединительной планки направляющая головка линейно смещается посредством той захватной руки, с которой шарнирно соединена указанная соединительная планка, в результате чего другая захватная рука также смещается, и за счт е шарнирного соединения с другой соединительной планкой она поворачивается в противоположном направлении по отношению к первой захватной руке. Это позволяет захвату разжиматься и сжиматься посредством поворота соединительной планки, т.е. в качестве привода может быть использован поворотный привод,который оказывает воздействие на одну из соединительных планок. Преимущество такого поворотного привода состоит в том, что его можно гораздо проще герметизировать, чем линейный привод, который контактирует, например, с направляющей головкой. Кроме того, такой привод более прост в реализации и требует меньше места, чем линейный привод. В предпочтительном варианте устройство транспортировки заготовок имеет отклоняющее устройство, которое прикладывает к направляющей головке силу, направленную в сторону захватных концов захватных рук. В результате действия такого отклоняющего устройства захват удерживается в сжатом-1 013444 положении или сжимается в сжатое положение при отсутствии какого-либо активного воздействия, направленного на разжимание захвата. Воздействие отклоняющего устройства также предотвращает какоелибо произвольное колебание захватных рук. Обе захватные руки предпочтительно шарнирно соединены с общей поворотной осью в направляющей головке. Таким образом, конструкция направляющей головки может быть относительно компактной. В предпочтительном варианте один конец каждой из двух соединительных планок установлен в неподвижном кожухе захвата так, что он имеет возможность поворота вокруг неподвижной оси, относящейся к соответствующей соединительной планке. Это означает, что соответствующая ось соединительных планок находится на одном конце рассматриваемой соединительной планки и может быть использована вся длина соединительных планок, поскольку другой конец каждой соединительной планки шарнирно соединн с соответствующей захватной рукой. В предпочтительном варианте устройство транспортировки заготовок имеет поворотный привод,который обеспечивает возможность поворота одной из соединительных планок. Как уже было указано,поворотный привод обладает преимуществом, заключающимся в том, что его гораздо проще герметизировать, чем линейный привод. К тому же такой привод более прост в реализации и требует меньше места, чем линейный привод. Поворотный привод предпочтительно имеет приводной стержень, выполненный с возможностью смещения в продольном направлении и соединнный с одной из соединительных планок посредством промежуточных элементов так, что рассматриваемая соединительная планка может поворачиваться при смещении приводного стержня в продольном направлении. Такой приводной стержень может в принципе быть использован для того, чтобы одновременно приводить в действие множество захватов, расположенных один за другим, при соединении стержня с одной из соединительных планок каждого из захватов посредством промежуточных элементов. В предпочтительном варианте устройство транспортировки заготовок имеет множество захватов,расположенных один за другим, выполненных с обеспечением возможности параллельной работы посредством привода. Таким образом, заготовки на отдельных участках обработки могут быть одновременно захвачены, перенесены и вновь отпущены. Захватные руки и соединительные планки с достижением преимущества сконструированы и расположены таким образом, что при повороте соединительных планок из одной крайней позиции в другую захватные концы обеих захватных рук сначала отклоняются друг от друга, а затем вновь идут навстречу друг другу. В таком случае по меньшей мере для одного захвата в обоих крайних положениях требуется относительно немного места по бокам. Поперечное смещение по меньшей мере одного захвата с заготовкой или без не происходит синхронизировано таким образом, что последовательность разжимания захватов позволяет осуществлять движение без столкновений. По причинам, связанным со временем, поперечное движение ранее обычно начиналось до того, как захват достигнет одного из своих крайних положений. Устройство транспортировки заготовок согласно изобретению будет ниже описано более подробно на основе примерного варианта выполнения со ссылкой на прилагаемые чертежи. Фиг. 1 представляет вид части многоэтапной формующей машины со стороны матриц с примерным вариантом выполнения устройства транспортировки заготовок согласно изобретению, имеющего четыре захвата. Фиг. 2 А-2 С представляют вид спереди важных элементов одного из четырх захватов устройства транспортировки заготовок на фиг. 1 с заготовкой в крайнем нижнем положении, среднем положении и крайнем верхнем положении. Фиг. 3 А-3 С представляют вид сзади элементов захвата на фиг. 2 А с заготовкой в крайнем нижнем положении, среднем положении и крайнем верхнем положении. Фиг. 4 А-4 С представляют вид элементов захвата на фиг. 2 А с заготовкой в перспективе под углом сзади в крайнем нижнем положении, среднем положении и крайнем верхнем положении. Фиг. 5 представляет вид элементов захвата на фиг. 2 А с дополнительными элементами захвата и поворотного привода в перспективе под углом спереди. Фиг. 6 представляет вид элементов захвата и элементов поворотного привода на фиг. 5 в перспективе под углом сзади, причм часть корпуса условно не показана для упрощения вида. Фиг. 7 представляет вид элементов захвата и элементов поворотного привода на фиг. 5 сзади, причм часть корпуса условно не показана для упрощения вида. Фиг. 8 представляет вид в разрезе по линии А-А на фиг. 7, причм показаны дополнительные части корпуса. Фиг. 9 А-9 С представляют вид элементов захвата и элементов поворотного привода на фиг. 5 спереди в крайнем нижнем положении, среднем положении и крайнем верхнем положении. Фиг. 10 А-10 С представляют вид сзади элементов захвата и поворотного привода на фиг. 5 без частей корпуса и отклоняющей пружины в крайнем нижнем положении, среднем положении и крайнем верхнем положении.-2 013444 Фиг. 11 представляет вид важной части поворотного привода устройства транспортировки заготовок на фиг. 1 и Фиг. 12 представляет вид частично в разрезе формующей машины с устройством транспортировки заготовок на фиг. 1. Примерный вариант выполнения многоэтапной формующей машины 8, показанный на фиг. 1, содержит четыре участка обработки, матрицы 81, 82, 83, 84 которых видны в каждом случае. Матрицы 81,82, 83, 84 установлены в держателе 85 матриц, который опосредованно соединн с корпусом 86 оборудования. Для транспортировки заготовок 9 к отдельным участкам обработки и от них предусмотрено устройство транспортировки заготовок, имеющее четыре захвата 1. С одной стороны, захваты 1 выполнены с возможностью поперечного смещения, для чего они установлены на блоке 4 поперечной транспортировки, который выполнен с возможностью поперечного смещения посредством тоннеля для поперечной транспортировки. С другой стороны, захваты 1 выполнены с возможностью сжимания и разжимания и одновременного подъма или опускания, что осуществляется посредством механизма, подробно описанного ниже. Для сжимания и разжимания захватов 1 предусмотрен приводной стержень 3, выполненный с возможностью смещения в продольном направлении, причм возможность продольного смещения указанного приводного стержня обеспечена посредством регулирующего устройства 5, как более подробно описано ниже со ссылкой на фиг. 12. Следующее утверждение относится ко всему последующему описанию. В тех случаях, когда позиционные обозначения на фигуре указаны с целью объяснения чертежа, но не объяснены непосредственно связанным с ним текстовым описанием, или наоборот, подразумевается ссылка на ту часть текста, где они упоминаются в приведнном выше описании фигур. На фиг. 2 А-2 С, 3 А-3 С, 4 А-4 С показаны важные элементы захвата 1 в крайнем нижнем положении,среднем положении и крайнем верхнем положении. В крайнем нижнем положении, изображнном на фиг. 2 А, 3 А и 4 А, захват 1 показан в сжатом состоянии и удерживающим заготовку 9. В среднем положении, изображнном на фиг. 2 В, 3 В и 4 В, захват 1 показан в максимальной степени разжатым и поднятым на половину максимальной высоты. В крайнем верхнем положении, изображнном на фиг. 2 С, 3 С и 4 С, захват 1 показан вновь сжатым и поднятым на максимальную высоту. Захват 1 содержит две неперекрещивающиеся захватные руки 11 и 12, которые выполнены с возможностью поворота по отношению друг к другу, причм каждая из рук соответственно имеет захватный конец 111, 121 для захвата заготовки 9. К каждому из захватных концов 111, 121 прикреплены винтами два захватных элемента 112, 113 и 122, 123, между которыми удерживают заготовку 9. На конце 114, 124, противоположном захватному концу 111, 121, каждая из двух захватных рук 11,12 шарнирно соединена с общей поворотной осью, которая не показана в материалах настоящего изобретения. В средней части между двумя концами каждая из захватных рук 11, 12 шарнирно соединена посредством поворотной оси (не показана) с концом 131, 141 своей соответствующей соединительной планки 13, 14. Каждая из двух соединительных планок 13, 14 выполнена с возможностью поворота вокруг неподвижной оси 130, 140, которая расположена в середине другого конца 132, 142 соединительной планки 13, 14 соответственно. Как можно увидеть на фиг. 4 А-4 С, в данном примерном варианте выполнения изобретения такая конструкция реализована посредством закреплнных поворотных осей 133, 143 в середине концов 132, 142 соединительных планок. Оси 130, 140 и закреплнные поворотные оси 133,14 3 неподвижны при сжимании и разжимании захвата 1; они перемещаются только во время поперечной транспортировки, осуществляемой захватом 1. Согласно изобретению неподвижная ось 130 соединительной планки 13 захватной руки 11 установлена ближе к захватной руке 12, чем неподвижная ось 140 соединительной планки 14 указанной захватной руки 12. В показанном примерном варианте выполнения изобретения неподвижная ось 130 соединительной планки 13 расположена, по существу, непосредственно позади захватной руки 12. Соответствующим образом неподвижная ось 140 соединительной планки 14 захватной руки 12 установлена ближе к захватной руке 11, чем неподвижная ось 130 соединительной планки 13 указанной захватной руки 11. В показанном примерном варианте выполнения изобретения неподвижная ось 140 соединительной планки 14 расположена, по существу, непосредственно перед захватной рукой 11. На конце 131 соединительной планки 13 установлен призматический элемент 134, имеющий поверхность соприкосновения с приводным элементом (не показан). Призматический элемент 134 привинчен к концу 131 соединительной планки посредством винта 135. При нажатии приводного элемента на призматический элемент 134 снизу соединительная планка 13 поворачивается, что приводит к тому, что захватная рука 11, начиная из крайнего нижнего положения в соответствии с фиг. 2 А, 3 А и 4 А, вначале отклоняется в сторону от захватной руки 12 и вверх до среднего положения в соответствии с фиг. 2 В, 3 В и 4 В, причм верхний конец 114 захватной руки 11 тянет захватную руку 12 вверх, что благодаря шарнирному соединению захватной руки 12 с соединительной планкой 14 посредством неподвижной оси 140 приводит к отклонению захватной руки 12 также наружу от захватной руки 11. Последующий, направленный вверх поворот соединительной планки 13 после достижения среднего положения приводит к тому, что две захватные руки 11, 12 поворачиваются далее вверх, но снова навстречу друг другу, до тех пор пока, наконец, не достигают крайнего верхнего поло-3 013444 жения согласно фиг. 2 С, 3 С и 4 С. На фиг. 5-7 можно увидеть, что концы 132, 142 соединительных планок 13, 14 установлены с возможностью поворота в неподвижных кожухах 161, 162 неподвижного корпуса 16. Верхние концы 114,124 захватных рук 11, 12 шарнирно соединены с вышеупомянутой общей поворотной осью в общей направляющей головке 15, которая установлена с возможностью линейного смещения в вертикальном направлении по двум вертикальным направляющим стержням 151, 152. На верхней стороне направляющей головки 15 установлены стержень 172 и шейка 173 оси отклоняющего устройства 17, вокруг которой установлена спиральная пружина 171. Спиральная пружина 171, верхний конец которой упирается в неподвижный кожух (не показан), приводится в действие сжатием и прикладывает к направляющей головке 15 силу в направлении захватных концов 111, 121 захватных рук 11, 12. Направляющая головка 15, на которую оказывает воздействие спиральная пружина 171, соответственно стремится передвинуть захватные руки 11, 12 в крайнее нижнее положение или удержать их в этом положении. Соответственно сжимание захвата 1 производится посредством отклоняющего устройства 17, а разжимание производится посредством активного поворотного привода. В настоящем описании показан следующий элемент поворотного привода: приводной рычаг 2 в форме двуплечего рычага, одно плечо 21 которого соприкасается в качестве приводного элемента с призматическим элементом 134 соединительной планки 13. Соединительный элемент 221, имеющий контактную поверхность 222 для элемента передачи силы, прикреплн винтовым соединением с возможностью поворота ко второму плечу 22 рычага приводного рычага 2. На фиг. 8, кроме уже описанных компонентов, показано также то, как верхние концы 114, 124 захватных рук 11, 12 шарнирно соединены с общей поворотной осью 153 в направляющей головке 15. Дополнительно здесь также показан неподвижный кожух 163 корпуса 16, в который упирается верхний конец спиральной пружины 171. Фиг. 9 А-9 С изображают описанные выше детали захвата 1 на виде спереди также в крайнем нижнем положении, среднем положении и крайнем верхнем положении. Ясно видно, как направляющая головка 15 линейно смещается вверх в неподвижном корпусе 16 и, таким образом, сжимает спиральную пружину 171. Фиг. 10 А-10 С в особенности изображают поворот соединительной планки 13 посредством приводного рычага 2 в крайнем нижнем положении, среднем положении и крайнем верхнем положении захвата 1. Ясно видно, что плечо 21 рычага, соприкасающееся с призматическим элементом 134 конца 131 соединительной планки, поворачивает соединительную планку 13 с призматическим элементом 134, в то время как соединительный элемент 221, прикреплнный с возможностью поворота к плечу 22 рычага,сохраняет сво положение по отношению к формующей машине при одновременном повороте плеча 22 рычага под ним. Соединительный элемент 221 с контактной поверхностью 222 смещается по дугообразной траектории справа налево. Это дат возможность поворота приводного рычага 2 посредством линейного движения элемента передачи силы, соприкасающегося с контактной поверхностью 222. Фиг. 11 изображает четыре приводных рычага 2, установленных один за другим, причм также показаны элементы соответствующего захвата 1 в случае с одним из приводных рычагов 2. Элемент 31 передачи силы соприкасается с каждой контактной поверхностью 222 соединительных элементов 221 приводных рычагов 2. Все четыре элемента 31 передачи силы прикреплены к общему стержню 32 передачи силы, который связан с приводным стержнем 3 посредством соединительного элемента 33. При смещении приводного стержня 3 в продольном направлении все четыре рычага 2 могут поворачиваться вместе. Приводной рычаг 3 выполнен с возможностью продольного смещения посредством регулирующего устройства 5, как показано на фиг. 12 и 1. Регулирующее устройство 5 содержит в данном случае приводной вал 51, который приводит в движение передаточный вал 52 посредством зубчатых колс 511 и 521. Передаточный вал оснащн кулачком 522, который нажимает на свободно вращающийся цилиндр 531 поворотного элемента 53. Поворотный элемент 53, в свою очередь, нажимает на цилиндр 543, который установлен с возможностью свободного вращения на свободном конце плеча 541 рычага двуплечего рычага 54. Таким образом, двуплечий рычаг 54 с двумя плечами 541 и 542 поворачивается вокруг закреплнной поворотной оси 544, причм плечо 542 рычага вытягивает наружу шарнирно соединнный с ним соединительный элемент 55 и, соответственно, шарнирно соединнный с ним приводной стержень 3. Могут быть осуществлены дополнительные варианты конструкции устройства транспортировки заготовок, описанного выше. Также следует специально отметить, что вместо отклоняющего устройства 17, имеющего спиральную пружину 171, можно использовать, например, пневматическое отклоняющее устройство. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Приспособление для захвата заготовок транспортирующего устройства формующей машины, содержащее привод и по меньшей мере один соединенный с приводом захват (1), имеющий две неперекрещивающиеся захватные руки (11, 12), которые выполнены с возможностью отклонения друг относительно друга, причм каждая захватная рука имеет захватный конец (111, 121) для захвата заготовки (9),при этом каждая из двух захватных рук (11, 12) своим концом (114, 124), противоположным захватному концу (111, 121), шарнирно соединена с общей направляющей головкой (15), а в средней части между двумя концами - со своей собственной соединительной планкой (13, 14), причм каждая из двух соединительных планок (13, 14) выполнена с возможностью поворота вокруг неподвижной оси (130, 140), отличающееся тем, что неподвижная ось (130, 140) соединительной планки (13, 14) одной захватной руки(11, 12) установлена ближе к другой захватной руке (11, 12), чем неподвижная ось (130, 140) соединительной планки (13, 14) указанной другой захватной руки (11, 12). 2. Приспособление для захвата заготовок по п.1, отличающееся тем, что направляющая головка (15) выполнена с возможностью линейного смещения вдоль неподвижной направляющей (151, 152) так, что при повороте соединительной планки (13, 14) направляющая головка (15) линейно смещается той захватной рукой (11, 12), с которой эта соединительная планка (13, 14) шарнирно соединена, в результате чего другая захватная рука (11, 12) также смещается и благодаря е шарнирному соединению с другой соединительной планкой (13, 14) поворачивается в противоположном направлении по сравнению с первой захватной рукой (11, 12). 3. Приспособление для захвата заготовок по п.1 или 2, отличающееся тем, что оно имеет отклоняющее устройство (17), которое прикладывает к направляющей головке (15) силу, направленную в сторону захватных концов (111, 121) захватных рук (11, 12). 4. Приспособление для захвата заготовок по любому из пп.1-3, отличающееся тем, что две захватные руки (11, 12) шарнирно соединены с общей поворотной осью (153) в направляющей головке (15). 5. Приспособление для захвата заготовок по любому из пп.1-4, отличающееся тем, что один конец(132, 142) каждой из двух соединительных планок (13, 14) установлен в неподвижном кожухе (161, 162) захвата (1) с возможностью поворота указанной соединительной планки вокруг неподвижной оси (130,140), принадлежащей соответствующей соединительной планке (13, 14). 6. Приспособление для захвата заготовок по любому из пп.1-5, отличающееся тем, что привод представляет собой поворотный привод, который обеспечивает возможность поворота одной из соединительных планок (13, 14). 7. Приспособление для захвата заготовок по п.6, отличающееся тем, что поворотный привод имеет приводной стержень (3), выполненный с возможностью продольного смещения и соединнный с одной из соединительных планок (13, 14) посредством промежуточных элементов (2, 31, 32, 33) так, что рассматриваемая соединительная планка (13, 14) имеет возможность поворота при смещении приводного стержня (3) в продольном направлении. 8. Приспособление для захвата заготовок по любому из пп.1-7, отличающееся тем, что оно имеет множество захватов (1), расположенных один за другим, выполненных с возможностью параллельной работы посредством привода. 9. Приспособление для захвата заготовок по любому из пп.1-8, отличающееся тем, что захватные руки (11, 12) и соединительные планки (13, 14) выполнены и установлены таким образом, что при повороте соединительных планок (13, 14) из одного крайнего положения в другое захватные концы (111, 121) двух захватных рук (11, 12) сначала отклоняются друг от друга, а затем перемещаются навстречу друг другу.
МПК / Метки
МПК: B21K 27/04
Метки: заготовок, формующей, транспортирующего, приспособление, захвата, машины, устройства
Код ссылки
<a href="https://eas.patents.su/13-13444-prisposoblenie-dlya-zahvata-zagotovok-transportiruyushhego-ustrojjstva-formuyushhejj-mashiny.html" rel="bookmark" title="База патентов Евразийского Союза">Приспособление для захвата заготовок транспортирующего устройства формующей машины</a>
Управляющее приспособление для экранирующего устройства.
Номер патента: 118
Опубликовано: 27.08.1998
Автор: Мадсен Ларс Хольк
МПК: E06B 9/322
Метки: управляющее, устройства, приспособление, экранирующего
Формула / Реферат:
1. Управляющее приспособление для экранирующего устройства (5), содержащее входной вал (20), который одним концом присоединен к приводному средству, в частности, включающему в себя вращаемый шкив (17), выполненный с возможностью приема приводного средства, такого как бесконечный шнур (8), и который другим концом присоединен к выходному валу (14), соединенному с возможностью фиксации для предотвращения поворота друг относительно друга с...
Управляющее приспособление для устройства экранирования окна с электрическим приводом
Номер патента: 115
Опубликовано: 27.08.1998
Автор: Лассен Герт Годвиг
МПК: E06B 9/82
Метки: электрическим, окна, приспособление, управляющее, экранирования, устройства, приводом
Формула / Реферат:
1. Управляющее приспособление для устройства экранирования окна с электрическим приводом, содержащего экранирующее тело (1), которое в неактивном положении (не закрытое окно) свернуто или сложено у верхней части основной рамы или элемента оконного переплета, при этом свободный конец экранирующего тела соединен с нижней поперечиной (4), простирающейся через всю ширину окна, шнур или натягивающий элемент в форме струны (12, 13, 24), для...
Производные аминоиндана в качестве ингибиторов обратного захвата серотонина и захвата норэпинефрина
Номер патента: 7655
Опубликовано: 29.12.2006
Авторы: Пюшль Аск, Келер Ян, Брегнедаль Петер, Бегесе Клаус Петер
МПК: A61P 25/22, A61K 31/357, A61K 31/135...
Метки: обратного, норэпинефрина, захвата, аминоиндана, качестве, ингибиторов, производные, серотонина
Формула / Реферат:
1. Соединение аминоиндана, имеющее формулу I где X означает -O-, -S- или -CR4R5-; Y означает -CR6R7-, -CR6R7-CR8R9- или -CR6=CR7-; или X и Y вместе образуют группу -CR4=CR5- или -CR4=CR5-CR6R7-; и U означает -O-, -S- или -CR10R11 или X означает -O-, -S- или -CR4R5-; и Y и U вместе образуют группу -CR6=CR7-, -CR6=CR7-CR10R11- или -CR6R7-CR10=CR11-; или X, и Y, и U вместе образуют -CR4=CR5-CR6=CR7-; R1 и R2 независимо выбраны из водорода,...
Машина округления заготовок теста
Номер патента: 4724
Опубликовано: 26.08.2004
Автор: Хаймович Владимир Исаевич
МПК: A21C 7/02
Метки: теста, округления, машина, заготовок
Формула / Реферат:
1. Машина округления заготовок теста, содержащая барабан, установленный на раме с возможностью вращения вокруг вертикальной оси, желоб, охватывающий барабан по винтовой линии и состоящий из состыкованных частей, каждая из которых содержит стенку и основание, причем основания зафиксированы на раме и примыкают к барабану, а стенки размещены на основаниях с возможностью смещения относительно барабана посредством шарнирных тяг, подвижно связывающих...
Погрузчик заготовок для экструдинг-прессов
Номер патента: 7234
Опубликовано: 25.08.2006
Авторы: Д'алессандро Анджело, Бальдасси Мауро
МПК: B21C 33/00
Метки: экструдинг-прессов, погрузчик, заготовок
Формула / Реферат:
1. Погрузчик болванок (1) для манипулирования одной или большим числом обрабатываемых заготовок, подаваемых в соответствующие экструдинг-прессы, содержащий поддерживающую структуру, пару захватов (7, 8) для удерживания по меньшей мере одной болванки (5), солидарно поддерживаемой двумя соответственными плечами (20, 21), где первое плечо (20) зафиксировано относительно поддерживающей структуры, а второе плечо (21) выполнено подвижным относительно...
Предыдущий патент: Электромеханический преобразователь
Следующий патент: Способ подземной разработки залежи каменного угля
Случайный патент: Скважинный флюид, включающий исходный флюид и измельченный закупоривающий агент