Система и способ морской сейсморазведки
Номер патента: 16513
Опубликовано: 30.05.2012
Формула / Реферат
1. Система морской сейсморазведки, включающая по меньшей мере одну морскую сейсмическую косу;
по меньшей мере один датчик давления, установленный по меньшей мере в одной морской сейсмической косе;
по меньшей мере один датчик движения частиц, установленный по меньшей мере в одной морской сейсмической косе и размещенный совместно по меньшей мере с одним датчиком давления,
причем по меньшей мере один датчик движения частиц имеет резонансную частоту, превышающую 30 Гц; и
вычислительные средства для комбинирования данных по давлению по меньшей мере от одного датчика давления и данных по движению частиц по меньшей мере от одного датчика движения частиц с целью их дальнейшей обработки.
2. Система по п.1, отличающаяся тем, что по меньшей мере один датчик давления включает гидрофон.
3. Система по п.1, отличающаяся тем, что по меньшей мере один датчик движения частиц включает геофон.
4. Система по п.1, отличающаяся тем, что по меньшей мере один датчик движения частиц включает акселерометр.
5. Система по п.3, отличающаяся тем, что комбинация жесткости пружины и подвешенной инертной массы геофона выбрана так, чтобы резонансная частота превышала 30 Гц.
6. Система по п.5, отличающаяся тем, что резонансная частота находится в диапазоне от примерно 30 до примерно 50 Гц.
7. Система по п.1, отличающаяся тем, что включает
вычислительные средства для расчета сигнала датчика движения частиц в диапазоне меньших частот по зарегистрированному сигналу датчика давления, тем самым генерирования модельного сигнала датчика движения частиц в диапазоне меньших частот; и
вычислительные средства для объединения модельного сигнала датчика движения частиц в диапазоне меньших частот с зарегистрированным сигналом датчика движения частиц в диапазоне частот выше указанного диапазона меньших частот для получения объединенного сигнала датчика движения частиц, имеющего, по существу, ту же ширину полосы, что и у сигнала, зарегистрированного датчиком давления.
8. Система по п.1, отличающаяся тем, что вычислительные средства для комбинирования данных по давлению и данных по движению частиц включают вычислительные средства для генерирования восходящей и нисходящей компонент волны.
9. Способ морской сейсморазведки, включающий следующие шаги:
буксируют по меньшей мере одну морскую сейсмическую косу;
собирают данные по давлению по меньшей мере от одного датчика давления, установленного по меньшей мере в одной морской сейсмической косе;
собирают данные по движению частиц по меньшей мере от одного датчика движения частиц, установленного по меньшей мере в одной морской сейсмической косе и размещенного совместно по меньшей мере с одним датчиком давления, причем по меньшей мере один датчик движения частиц имеет резонансную частоту, превышающую 30 Гц; и
комбинируют данные по давлению и данные по движению частиц с целью их дальнейшей обработки.
10. Способ по п.9, отличающийся тем, что по меньшей мере один датчик давления включает гидрофон.
11. Способ по п.9, отличающийся тем, что по меньшей мере один датчик движения частиц включает геофон.
12. Способ по п.9, отличающийся тем, что по меньшей мере один датчик движения частиц включает акселерометр.
13. Способ по п.11, отличающийся тем, что комбинация жесткости пружины и подвешенной инертной массы геофона выбрана так, чтобы резонансная частота превышала 30 Гц.
14. Способ по п.13, отличающийся тем, что резонансная частота находится в диапазоне от примерно 30 до примерно 50 Гц.
15. Способ по п.9, отличающийся тем, что включает следующие шаги:
рассчитывают сигнал датчика движения частиц в диапазоне меньших частот по зарегистрированному сигналу датчика давления, тем самым генерируют модельный сигнал датчика движения частиц в диапазоне меньших частот; и
объединяют модельный сигнал датчика движения частиц в диапазоне меньших частот с зарегистрированным сигналом датчика движения частиц в диапазоне частот выше указанного диапазона меньших частот для получения объединенного сигнала датчика движения частиц, имеющего, по существу, ту же ширину полосы, что и у сигнала, зарегистрированного датчиком давления.
16. Способ по п.9, отличающийся тем, что комбинирование данных по давлению и данных по движению частиц включает генерирование восходящей и нисходящей компонент волны.
Текст
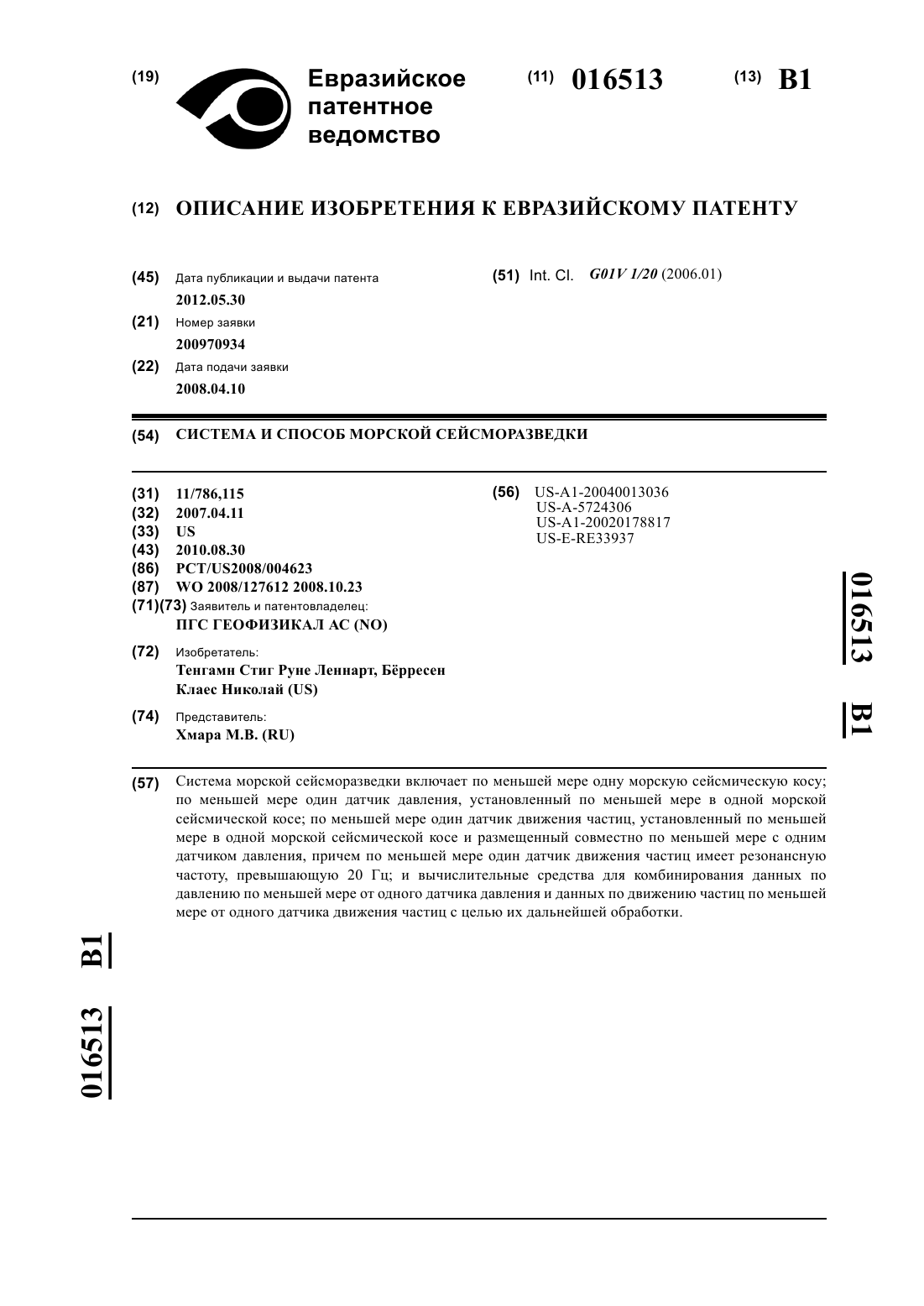
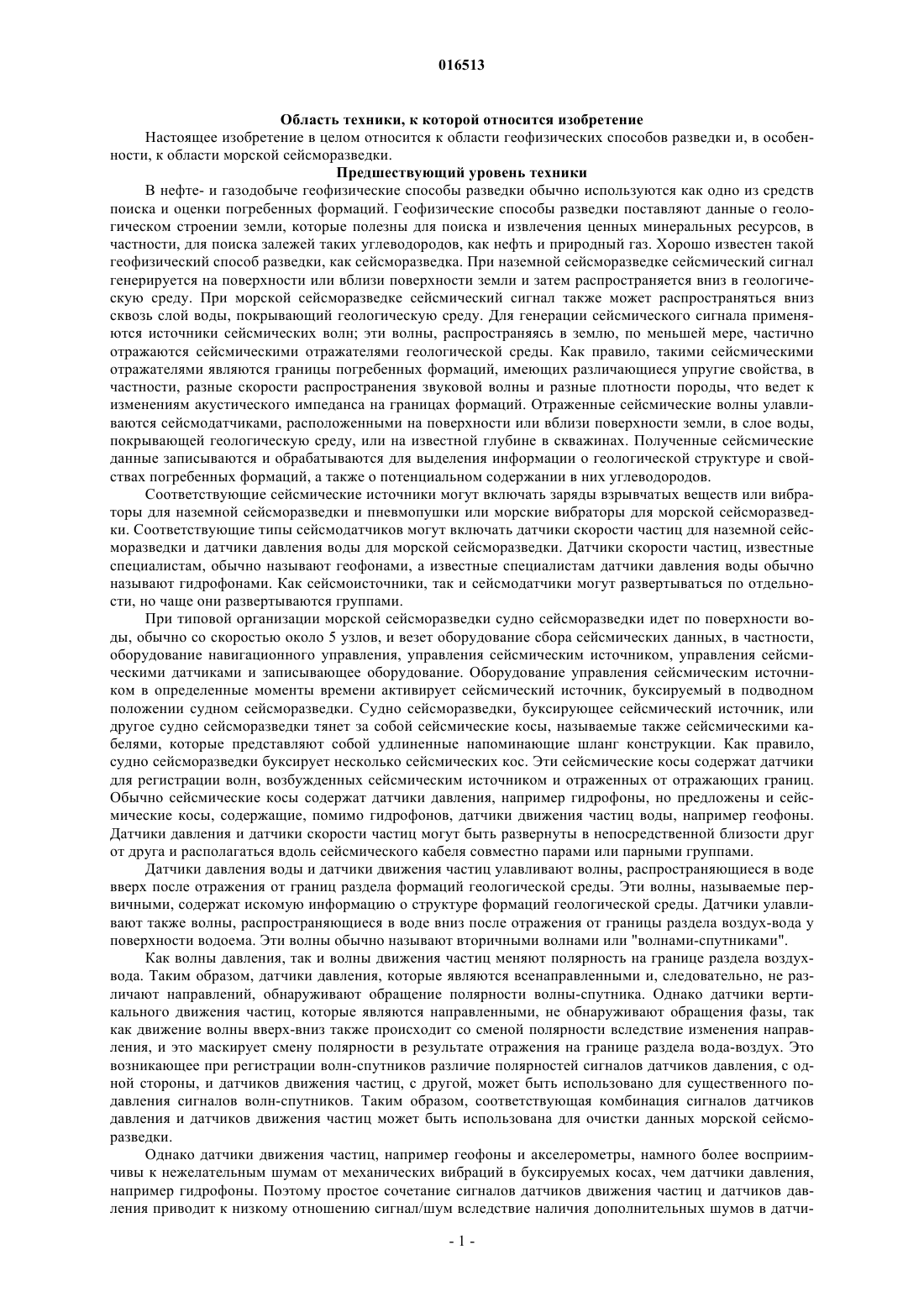
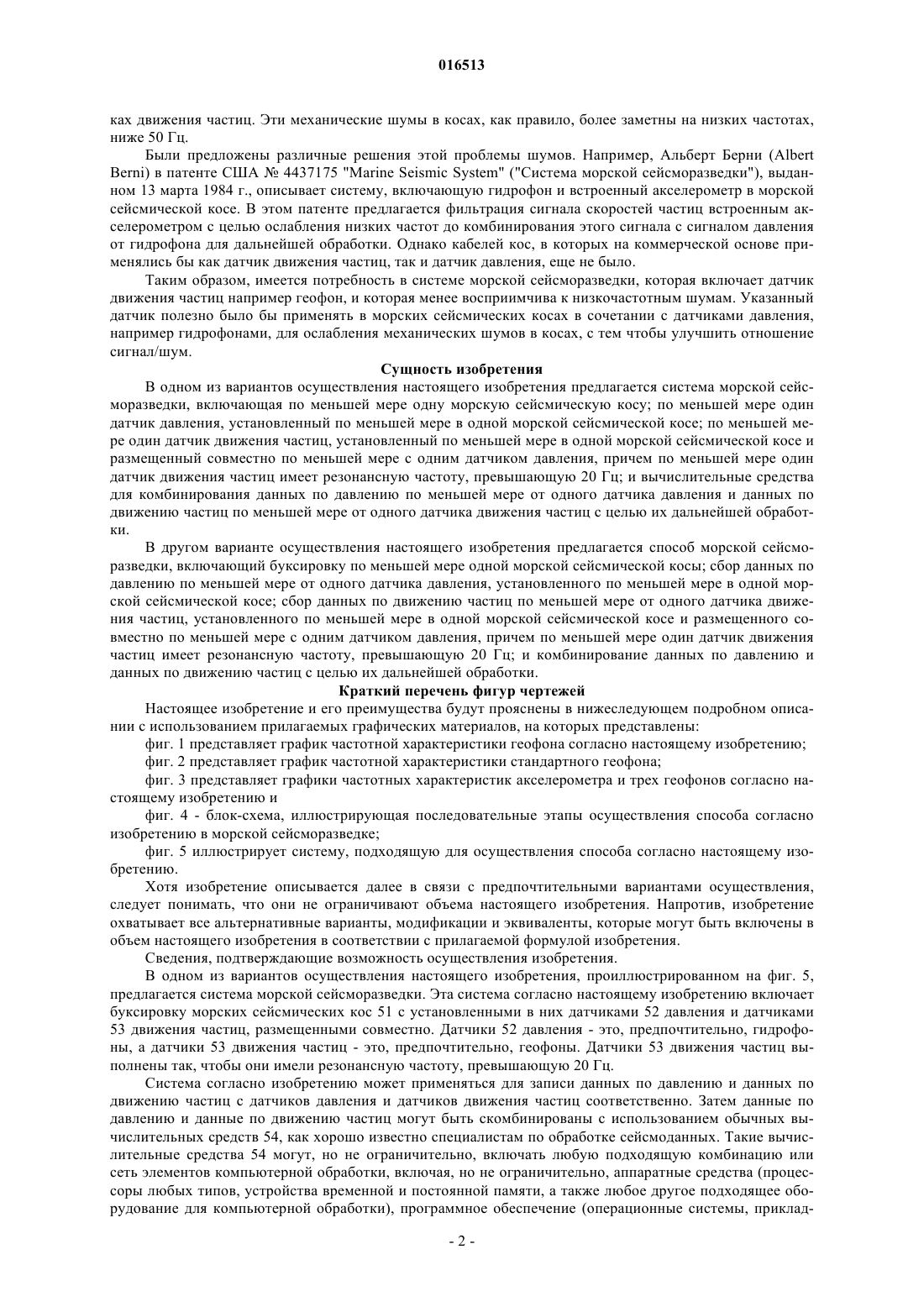
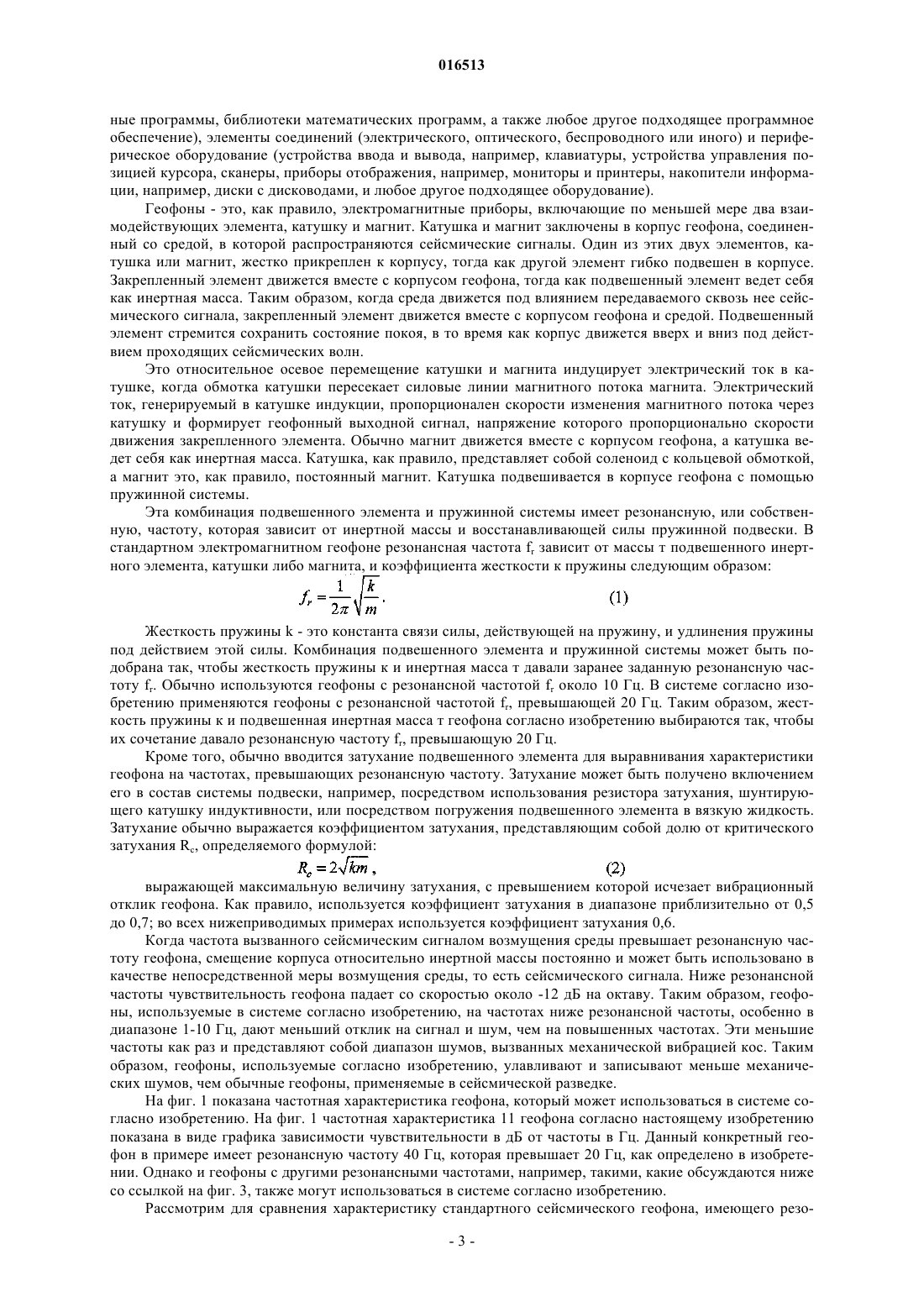
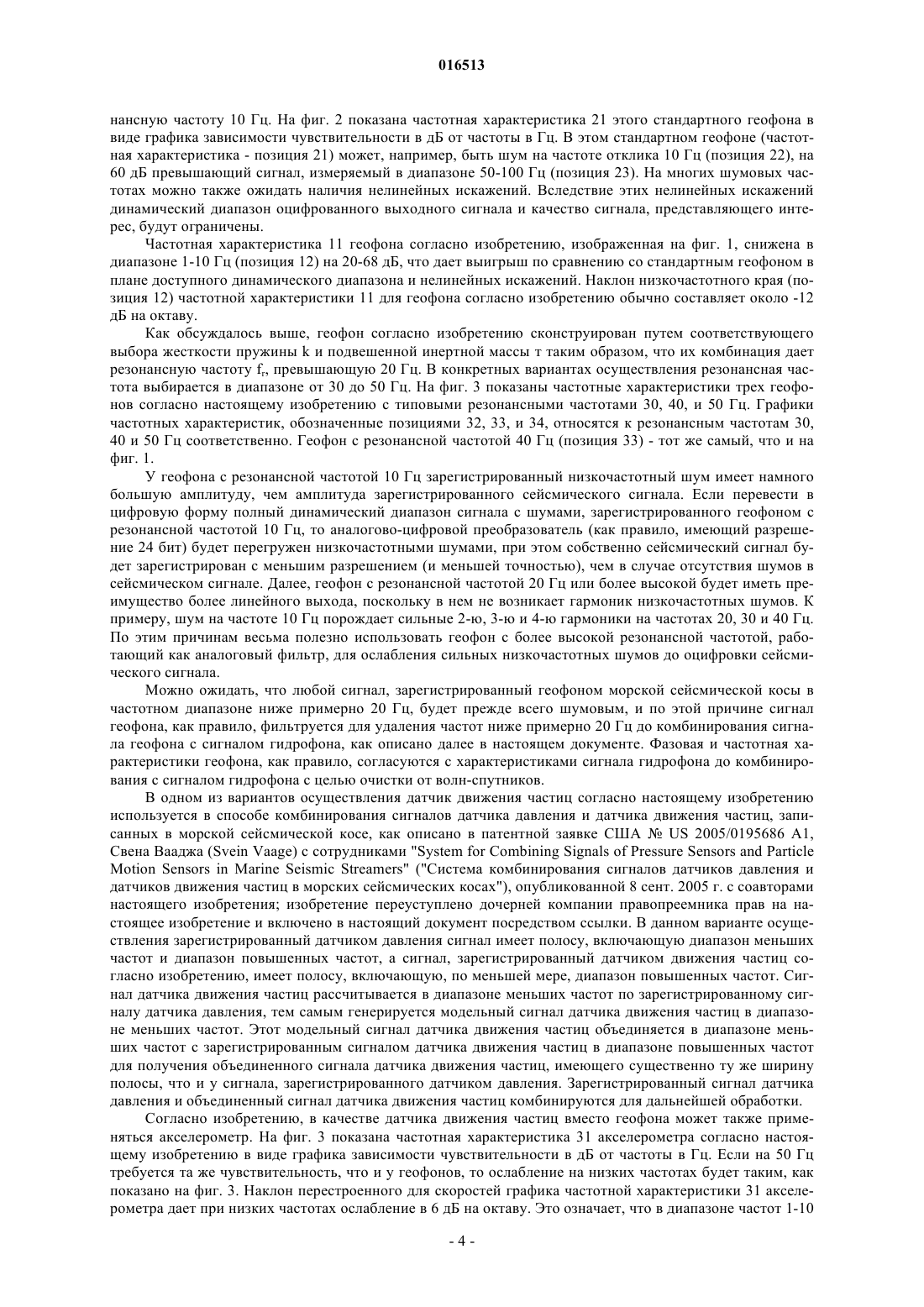
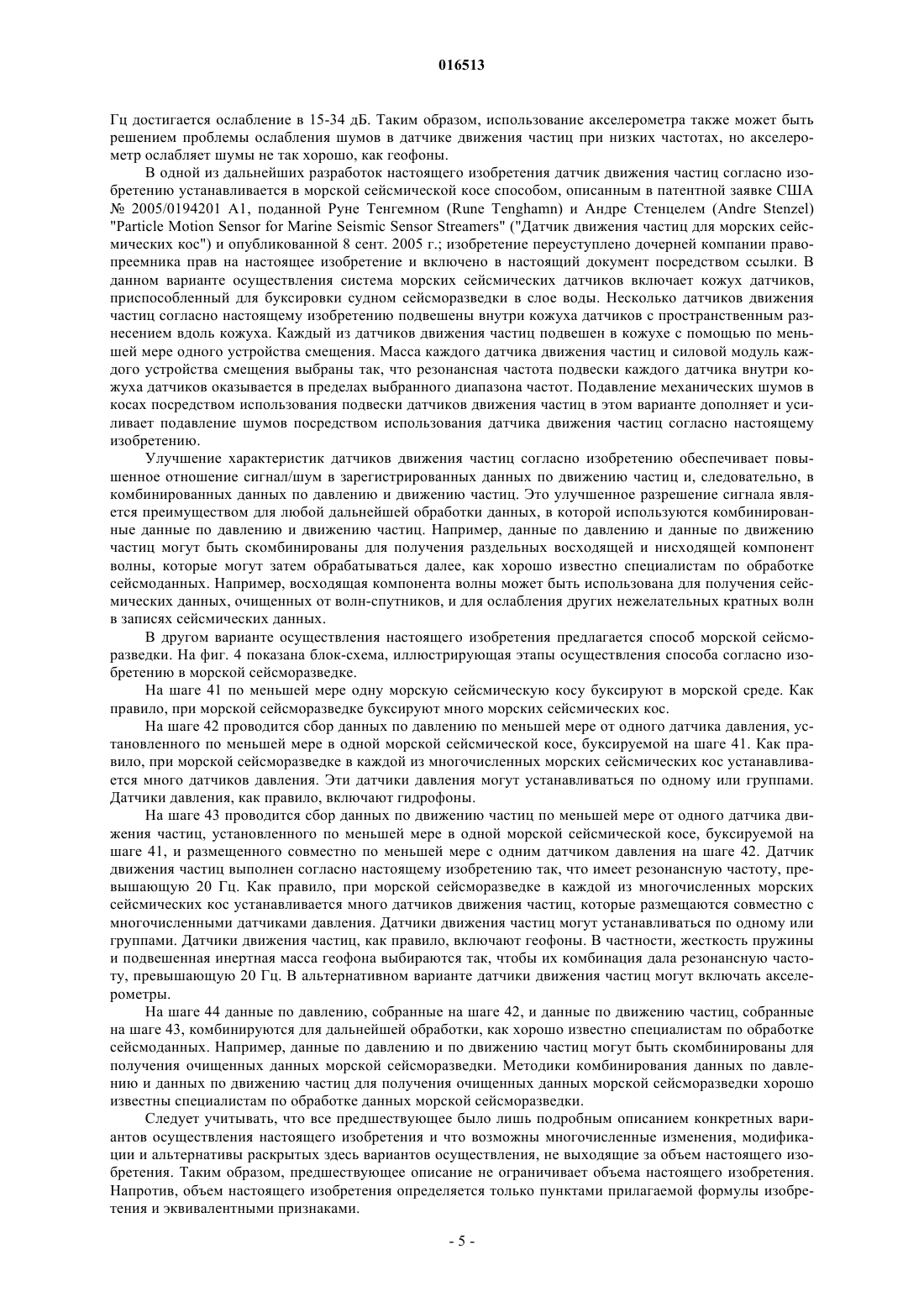
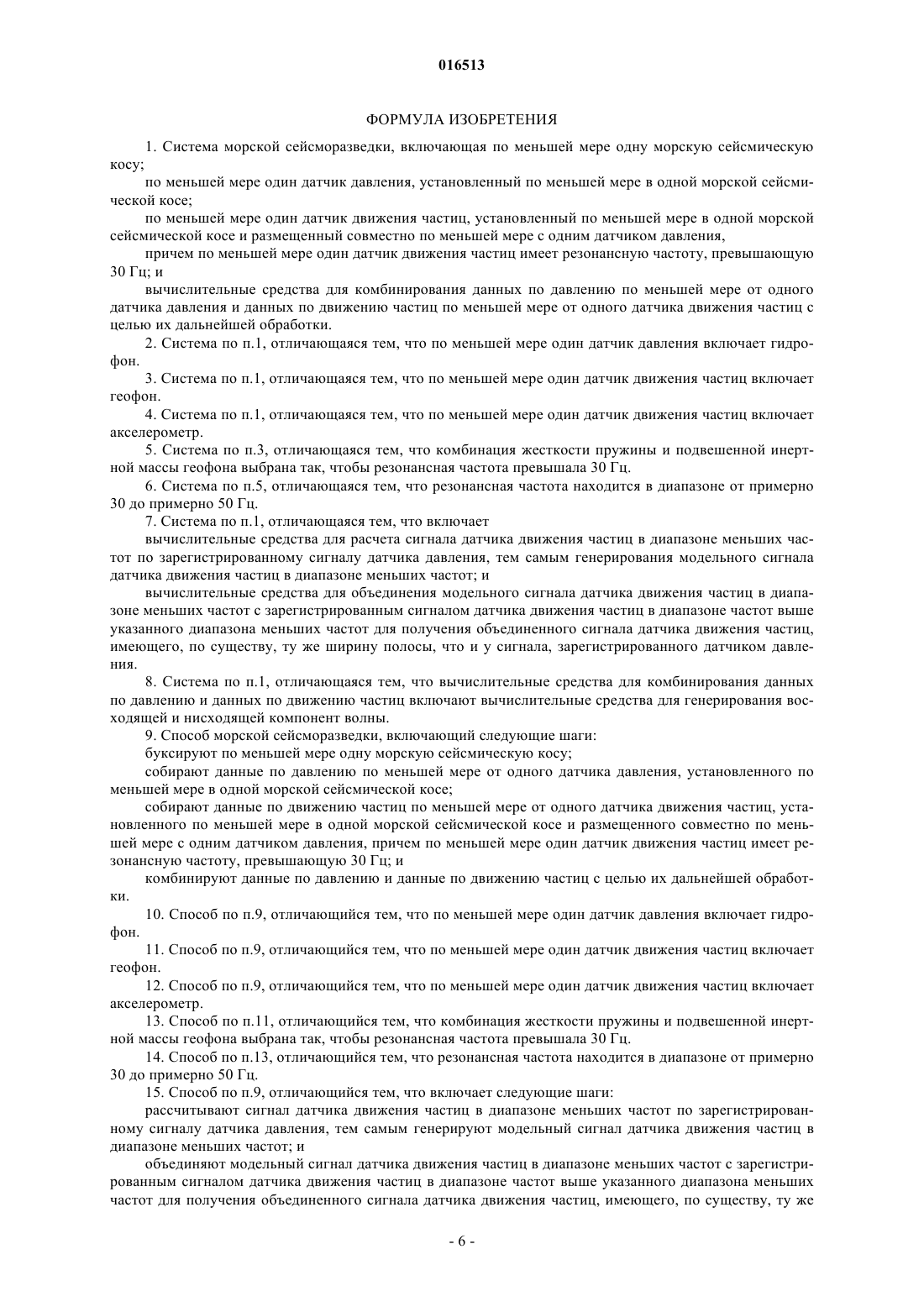
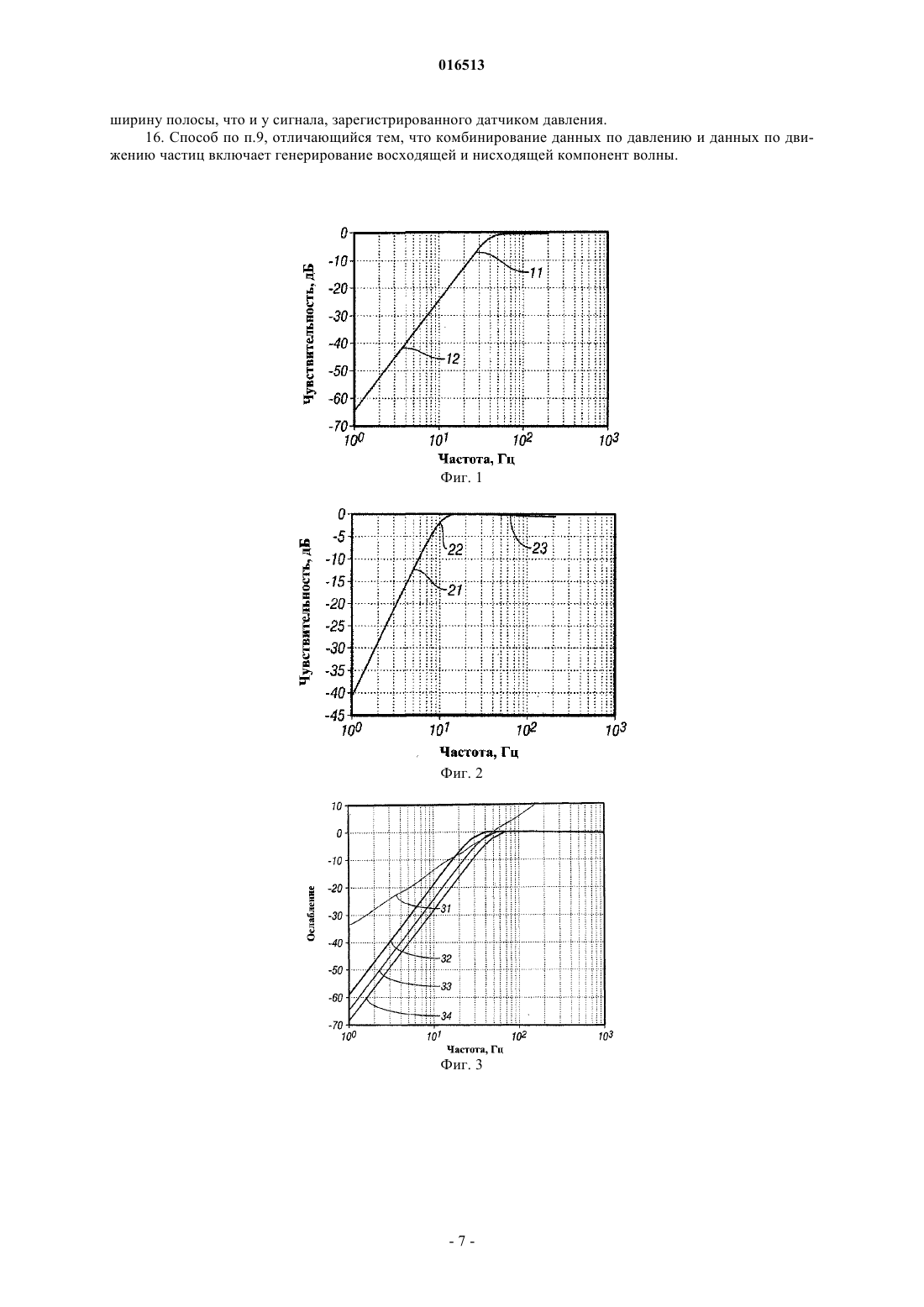
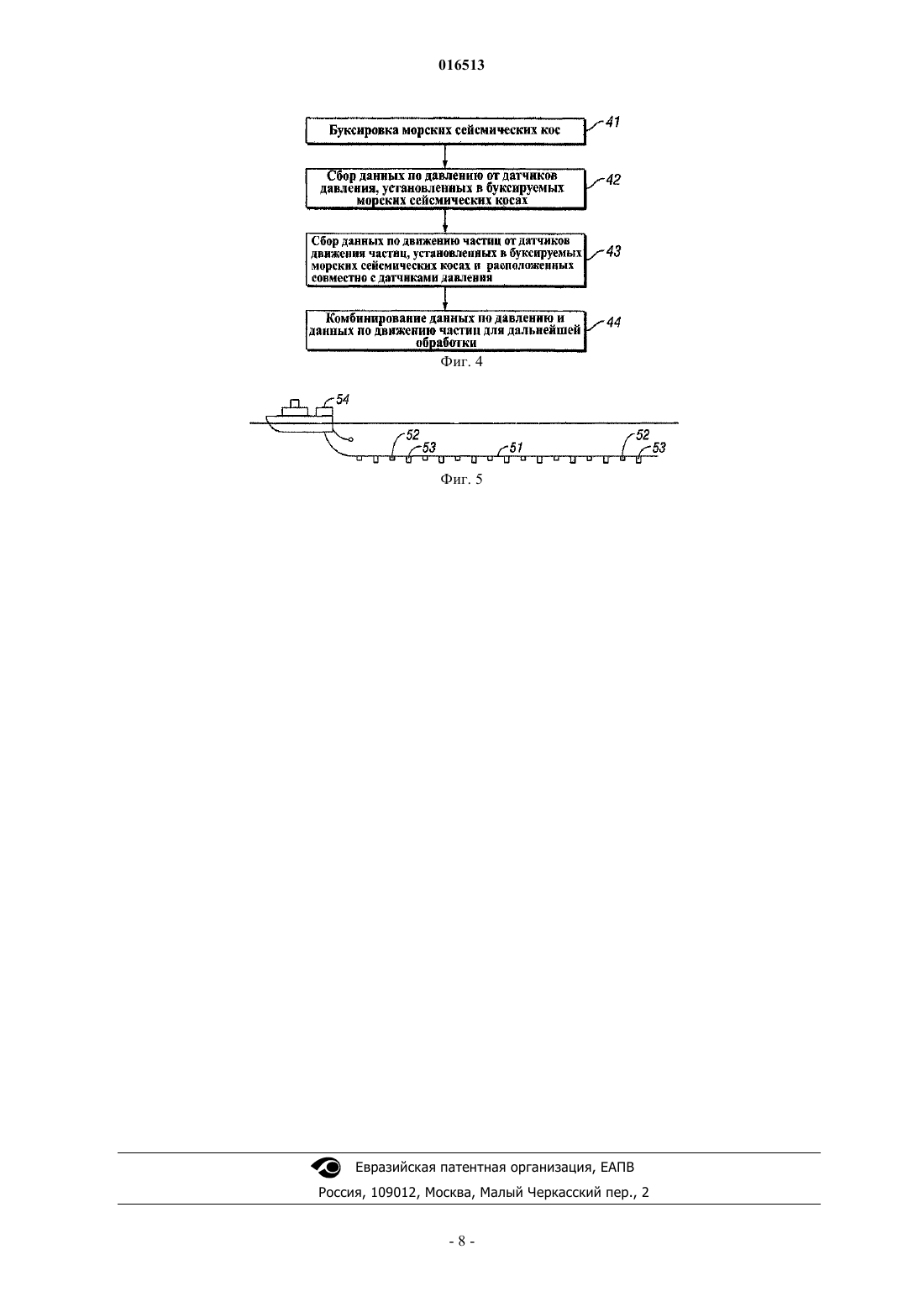
Система морской сейсморазведки включает по меньшей мере одну морскую сейсмическую косу; по меньшей мере один датчик давления, установленный по меньшей мере в одной морской сейсмической косе; по меньшей мере один датчик движения частиц, установленный по меньшей мере в одной морской сейсмической косе и размещенный совместно по меньшей мере с одним датчиком давления, причем по меньшей мере один датчик движения частиц имеет резонансную частоту, превышающую 20 Гц; и вычислительные средства для комбинирования данных по давлению по меньшей мере от одного датчика давления и данных по движению частиц по меньшей мере от одного датчика движения частиц с целью их дальнейшей обработки. Тенгамн Стиг Руне Леннарт, Брресен Клаес Николай (US) Хмара М.В. (RU)(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) 016513 Область техники, к которой относится изобретение Настоящее изобретение в целом относится к области геофизических способов разведки и, в особенности, к области морской сейсморазведки. Предшествующий уровень техники В нефте- и газодобыче геофизические способы разведки обычно используются как одно из средств поиска и оценки погребенных формаций. Геофизические способы разведки поставляют данные о геологическом строении земли, которые полезны для поиска и извлечения ценных минеральных ресурсов, в частности, для поиска залежей таких углеводородов, как нефть и природный газ. Хорошо известен такой геофизический способ разведки, как сейсморазведка. При наземной сейсморазведке сейсмический сигнал генерируется на поверхности или вблизи поверхности земли и затем распространяется вниз в геологическую среду. При морской сейсморазведке сейсмический сигнал также может распространяться вниз сквозь слой воды, покрывающий геологическую среду. Для генерации сейсмического сигнала применяются источники сейсмических волн; эти волны, распространяясь в землю, по меньшей мере, частично отражаются сейсмическими отражателями геологической среды. Как правило, такими сейсмическими отражателями являются границы погребенных формаций, имеющих различающиеся упругие свойства, в частности, разные скорости распространения звуковой волны и разные плотности породы, что ведет к изменениям акустического импеданса на границах формаций. Отраженные сейсмические волны улавливаются сейсмодатчиками, расположенными на поверхности или вблизи поверхности земли, в слое воды,покрывающей геологическую среду, или на известной глубине в скважинах. Полученные сейсмические данные записываются и обрабатываются для выделения информации о геологической структуре и свойствах погребенных формаций, а также о потенциальном содержании в них углеводородов. Соответствующие сейсмические источники могут включать заряды взрывчатых веществ или вибраторы для наземной сейсморазведки и пневмопушки или морские вибраторы для морской сейсморазведки. Соответствующие типы сейсмодатчиков могут включать датчики скорости частиц для наземной сейсморазведки и датчики давления воды для морской сейсморазведки. Датчики скорости частиц, известные специалистам, обычно называют геофонами, а известные специалистам датчики давления воды обычно называют гидрофонами. Как сейсмоисточники, так и сейсмодатчики могут развертываться по отдельности, но чаще они развертываются группами. При типовой организации морской сейсморазведки судно сейсморазведки идет по поверхности воды, обычно со скоростью около 5 узлов, и везет оборудование сбора сейсмических данных, в частности,оборудование навигационного управления, управления сейсмическим источником, управления сейсмическими датчиками и записывающее оборудование. Оборудование управления сейсмическим источником в определенные моменты времени активирует сейсмический источник, буксируемый в подводном положении судном сейсморазведки. Судно сейсморазведки, буксирующее сейсмический источник, или другое судно сейсморазведки тянет за собой сейсмические косы, называемые также сейсмическими кабелями, которые представляют собой удлиненные напоминающие шланг конструкции. Как правило,судно сейсморазведки буксирует несколько сейсмических кос. Эти сейсмические косы содержат датчики для регистрации волн, возбужденных сейсмическим источником и отраженных от отражающих границ. Обычно сейсмические косы содержат датчики давления, например гидрофоны, но предложены и сейсмические косы, содержащие, помимо гидрофонов, датчики движения частиц воды, например геофоны. Датчики давления и датчики скорости частиц могут быть развернуты в непосредственной близости друг от друга и располагаться вдоль сейсмического кабеля совместно парами или парными группами. Датчики давления воды и датчики движения частиц улавливают волны, распространяющиеся в воде вверх после отражения от границ раздела формаций геологической среды. Эти волны, называемые первичными, содержат искомую информацию о структуре формаций геологической среды. Датчики улавливают также волны, распространяющиеся в воде вниз после отражения от границы раздела воздух-вода у поверхности водоема. Эти волны обычно называют вторичными волнами или "волнами-спутниками". Как волны давления, так и волны движения частиц меняют полярность на границе раздела воздухвода. Таким образом, датчики давления, которые являются всенаправленными и, следовательно, не различают направлений, обнаруживают обращение полярности волны-спутника. Однако датчики вертикального движения частиц, которые являются направленными, не обнаруживают обращения фазы, так как движение волны вверх-вниз также происходит со сменой полярности вследствие изменения направления, и это маскирует смену полярности в результате отражения на границе раздела вода-воздух. Это возникающее при регистрации волн-спутников различие полярностей сигналов датчиков давления, с одной стороны, и датчиков движения частиц, с другой, может быть использовано для существенного подавления сигналов волн-спутников. Таким образом, соответствующая комбинация сигналов датчиков давления и датчиков движения частиц может быть использована для очистки данных морской сейсморазведки. Однако датчики движения частиц, например геофоны и акселерометры, намного более восприимчивы к нежелательным шумам от механических вибраций в буксируемых косах, чем датчики давления,например гидрофоны. Поэтому простое сочетание сигналов датчиков движения частиц и датчиков давления приводит к низкому отношению сигнал/шум вследствие наличия дополнительных шумов в датчи-1 016513 ках движения частиц. Эти механические шумы в косах, как правило, более заметны на низких частотах,ниже 50 Гц. Были предложены различные решения этой проблемы шумов. Например, Альберт Берни (AlbertBerni) в патенте США 4437175 "Marine Seismic System" ("Система морской сейсморазведки"), выданном 13 марта 1984 г., описывает систему, включающую гидрофон и встроенный акселерометр в морской сейсмической косе. В этом патенте предлагается фильтрация сигнала скоростей частиц встроенным акселерометром с целью ослабления низких частот до комбинирования этого сигнала с сигналом давления от гидрофона для дальнейшей обработки. Однако кабелей кос, в которых на коммерческой основе применялись бы как датчик движения частиц, так и датчик давления, еще не было. Таким образом, имеется потребность в системе морской сейсморазведки, которая включает датчик движения частиц например геофон, и которая менее восприимчива к низкочастотным шумам. Указанный датчик полезно было бы применять в морских сейсмических косах в сочетании с датчиками давления,например гидрофонами, для ослабления механических шумов в косах, с тем чтобы улучшить отношение сигнал/шум. Сущность изобретения В одном из вариантов осуществления настоящего изобретения предлагается система морской сейсморазведки, включающая по меньшей мере одну морскую сейсмическую косу; по меньшей мере один датчик давления, установленный по меньшей мере в одной морской сейсмической косе; по меньшей мере один датчик движения частиц, установленный по меньшей мере в одной морской сейсмической косе и размещенный совместно по меньшей мере с одним датчиком давления, причем по меньшей мере один датчик движения частиц имеет резонансную частоту, превышающую 20 Гц; и вычислительные средства для комбинирования данных по давлению по меньшей мере от одного датчика давления и данных по движению частиц по меньшей мере от одного датчика движения частиц с целью их дальнейшей обработки. В другом варианте осуществления настоящего изобретения предлагается способ морской сейсморазведки, включающий буксировку по меньшей мере одной морской сейсмической косы; сбор данных по давлению по меньшей мере от одного датчика давления, установленного по меньшей мере в одной морской сейсмической косе; сбор данных по движению частиц по меньшей мере от одного датчика движения частиц, установленного по меньшей мере в одной морской сейсмической косе и размещенного совместно по меньшей мере с одним датчиком давления, причем по меньшей мере один датчик движения частиц имеет резонансную частоту, превышающую 20 Гц; и комбинирование данных по давлению и данных по движению частиц с целью их дальнейшей обработки. Краткий перечень фигур чертежей Настоящее изобретение и его преимущества будут прояснены в нижеследующем подробном описании с использованием прилагаемых графических материалов, на которых представлены: фиг. 1 представляет график частотной характеристики геофона согласно настоящему изобретению; фиг. 2 представляет график частотной характеристики стандартного геофона; фиг. 3 представляет графики частотных характеристик акселерометра и трех геофонов согласно настоящему изобретению и фиг. 4 - блок-схема, иллюстрирующая последовательные этапы осуществления способа согласно изобретению в морской сейсморазведке; фиг. 5 иллюстрирует систему, подходящую для осуществления способа согласно настоящему изобретению. Хотя изобретение описывается далее в связи с предпочтительными вариантами осуществления,следует понимать, что они не ограничивают объема настоящего изобретения. Напротив, изобретение охватывает все альтернативные варианты, модификации и эквиваленты, которые могут быть включены в объем настоящего изобретения в соответствии с прилагаемой формулой изобретения. Сведения, подтверждающие возможность осуществления изобретения. В одном из вариантов осуществления настоящего изобретения, проиллюстрированном на фиг. 5,предлагается система морской сейсморазведки. Эта система согласно настоящему изобретению включает буксировку морских сейсмических кос 51 с установленными в них датчиками 52 давления и датчиками 53 движения частиц, размещенными совместно. Датчики 52 давления - это, предпочтительно, гидрофоны, а датчики 53 движения частиц - это, предпочтительно, геофоны. Датчики 53 движения частиц выполнены так, чтобы они имели резонансную частоту, превышающую 20 Гц. Система согласно изобретению может применяться для записи данных по давлению и данных по движению частиц с датчиков давления и датчиков движения частиц соответственно. Затем данные по давлению и данные по движению частиц могут быть скомбинированы с использованием обычных вычислительных средств 54, как хорошо известно специалистам по обработке сейсмоданных. Такие вычислительные средства 54 могут, но не ограничительно, включать любую подходящую комбинацию или сеть элементов компьютерной обработки, включая, но не ограничительно, аппаратные средства (процессоры любых типов, устройства временной и постоянной памяти, а также любое другое подходящее оборудование для компьютерной обработки), программное обеспечение (операционные системы, приклад-2 016513 ные программы, библиотеки математических программ, а также любое другое подходящее программное обеспечение), элементы соединений (электрического, оптического, беспроводного или иного) и периферическое оборудование (устройства ввода и вывода, например, клавиатуры, устройства управления позицией курсора, сканеры, приборы отображения, например, мониторы и принтеры, накопители информации, например, диски с дисководами, и любое другое подходящее оборудование). Геофоны - это, как правило, электромагнитные приборы, включающие по меньшей мере два взаимодействующих элемента, катушку и магнит. Катушка и магнит заключены в корпус геофона, соединенный со средой, в которой распространяются сейсмические сигналы. Один из этих двух элементов, катушка или магнит, жестко прикреплен к корпусу, тогда как другой элемент гибко подвешен в корпусе. Закрепленный элемент движется вместе с корпусом геофона, тогда как подвешенный элемент ведет себя как инертная масса. Таким образом, когда среда движется под влиянием передаваемого сквозь нее сейсмического сигнала, закрепленный элемент движется вместе с корпусом геофона и средой. Подвешенный элемент стремится сохранить состояние покоя, в то время как корпус движется вверх и вниз под действием проходящих сейсмических волн. Это относительное осевое перемещение катушки и магнита индуцирует электрический ток в катушке, когда обмотка катушки пересекает силовые линии магнитного потока магнита. Электрический ток, генерируемый в катушке индукции, пропорционален скорости изменения магнитного потока через катушку и формирует геофонный выходной сигнал, напряжение которого пропорционально скорости движения закрепленного элемента. Обычно магнит движется вместе с корпусом геофона, а катушка ведет себя как инертная масса. Катушка, как правило, представляет собой соленоид с кольцевой обмоткой,а магнит это, как правило, постоянный магнит. Катушка подвешивается в корпусе геофона с помощью пружинной системы. Эта комбинация подвешенного элемента и пружинной системы имеет резонансную, или собственную, частоту, которая зависит от инертной массы и восстанавливающей силы пружинной подвески. В стандартном электромагнитном геофоне резонансная частота fr зависит от массы т подвешенного инертного элемента, катушки либо магнита, и коэффициента жесткости к пружины следующим образом: Жесткость пружины k - это константа связи силы, действующей на пружину, и удлинения пружины под действием этой силы. Комбинация подвешенного элемента и пружинной системы может быть подобрана так, чтобы жесткость пружины к и инертная масса т давали заранее заданную резонансную частоту fr. Обычно используются геофоны с резонансной частотой fr около 10 Гц. В системе согласно изобретению применяются геофоны с резонансной частотой fr, превышающей 20 Гц. Таким образом, жесткость пружины к и подвешенная инертная масса т геофона согласно изобретению выбираются так, чтобы их сочетание давало резонансную частоту fr, превышающую 20 Гц. Кроме того, обычно вводится затухание подвешенного элемента для выравнивания характеристики геофона на частотах, превышающих резонансную частоту. Затухание может быть получено включением его в состав системы подвески, например, посредством использования резистора затухания, шунтирующего катушку индуктивности, или посредством погружения подвешенного элемента в вязкую жидкость. Затухание обычно выражается коэффициентом затухания, представляющим собой долю от критического затухания Rc, определяемого формулой: выражающей максимальную величину затухания, с превышением которой исчезает вибрационный отклик геофона. Как правило, используется коэффициент затухания в диапазоне приблизительно от 0,5 до 0,7; во всех нижеприводимых примерах используется коэффициент затухания 0,6. Когда частота вызванного сейсмическим сигналом возмущения среды превышает резонансную частоту геофона, смещение корпуса относительно инертной массы постоянно и может быть использовано в качестве непосредственной меры возмущения среды, то есть сейсмического сигнала. Ниже резонансной частоты чувствительность геофона падает со скоростью около -12 дБ на октаву. Таким образом, геофоны, используемые в системе согласно изобретению, на частотах ниже резонансной частоты, особенно в диапазоне 1-10 Гц, дают меньший отклик на сигнал и шум, чем на повышенных частотах. Эти меньшие частоты как раз и представляют собой диапазон шумов, вызванных механической вибрацией кос. Таким образом, геофоны, используемые согласно изобретению, улавливают и записывают меньше механических шумов, чем обычные геофоны, применяемые в сейсмической разведке. На фиг. 1 показана частотная характеристика геофона, который может использоваться в системе согласно изобретению. На фиг. 1 частотная характеристика 11 геофона согласно настоящему изобретению показана в виде графика зависимости чувствительности в дБ от частоты в Гц. Данный конкретный геофон в примере имеет резонансную частоту 40 Гц, которая превышает 20 Гц, как определено в изобретении. Однако и геофоны с другими резонансными частотами, например, такими, какие обсуждаются ниже со ссылкой на фиг. 3, также могут использоваться в системе согласно изобретению. Рассмотрим для сравнения характеристику стандартного сейсмического геофона, имеющего резо-3 016513 нансную частоту 10 Гц. На фиг. 2 показана частотная характеристика 21 этого стандартного геофона в виде графика зависимости чувствительности в дБ от частоты в Гц. В этом стандартном геофоне (частотная характеристика - позиция 21) может, например, быть шум на частоте отклика 10 Гц (позиция 22), на 60 дБ превышающий сигнал, измеряемый в диапазоне 50-100 Гц (позиция 23). На многих шумовых частотах можно также ожидать наличия нелинейных искажений. Вследствие этих нелинейных искажений динамический диапазон оцифрованного выходного сигнала и качество сигнала, представляющего интерес, будут ограничены. Частотная характеристика 11 геофона согласно изобретению, изображенная на фиг. 1, снижена в диапазоне 1-10 Гц (позиция 12) на 20-68 дБ, что дает выигрыш по сравнению со стандартным геофоном в плане доступного динамического диапазона и нелинейных искажений. Наклон низкочастотного края (позиция 12) частотной характеристики 11 для геофона согласно изобретению обычно составляет около -12 дБ на октаву. Как обсуждалось выше, геофон согласно изобретению сконструирован путем соответствующего выбора жесткости пружины k и подвешенной инертной массы т таким образом, что их комбинация дает резонансную частоту fr, превышающую 20 Гц. В конкретных вариантах осуществления резонансная частота выбирается в диапазоне от 30 до 50 Гц. На фиг. 3 показаны частотные характеристики трех геофонов согласно настоящему изобретению с типовыми резонансными частотами 30, 40, и 50 Гц. Графики частотных характеристик, обозначенные позициями 32, 33, и 34, относятся к резонансным частотам 30,40 и 50 Гц соответственно. Геофон с резонансной частотой 40 Гц (позиция 33) - тот же самый, что и на фиг. 1. У геофона с резонансной частотой 10 Гц зарегистрированный низкочастотный шум имеет намного большую амплитуду, чем амплитуда зарегистрированного сейсмического сигнала. Если перевести в цифровую форму полный динамический диапазон сигнала с шумами, зарегистрированного геофоном с резонансной частотой 10 Гц, то аналогово-цифровой преобразователь (как правило, имеющий разрешение 24 бит) будет перегружен низкочастотными шумами, при этом собственно сейсмический сигнал будет зарегистрирован с меньшим разрешением (и меньшей точностью), чем в случае отсутствия шумов в сейсмическом сигнале. Далее, геофон с резонансной частотой 20 Гц или более высокой будет иметь преимущество более линейного выхода, поскольку в нем не возникает гармоник низкочастотных шумов. К примеру, шум на частоте 10 Гц порождает сильные 2-ю, 3-ю и 4-ю гармоники на частотах 20, 30 и 40 Гц. По этим причинам весьма полезно использовать геофон с более высокой резонансной частотой, работающий как аналоговый фильтр, для ослабления сильных низкочастотных шумов до оцифровки сейсмического сигнала. Можно ожидать, что любой сигнал, зарегистрированный геофоном морской сейсмической косы в частотном диапазоне ниже примерно 20 Гц, будет прежде всего шумовым, и по этой причине сигнал геофона, как правило, фильтруется для удаления частот ниже примерно 20 Гц до комбинирования сигнала геофона с сигналом гидрофона, как описано далее в настоящем документе. Фазовая и частотная характеристики геофона, как правило, согласуются с характеристиками сигнала гидрофона до комбинирования с сигналом гидрофона с целью очистки от волн-спутников. В одном из вариантов осуществления датчик движения частиц согласно настоящему изобретению используется в способе комбинирования сигналов датчика давления и датчика движения частиц, записанных в морской сейсмической косе, как описано в патентной заявке СШАUS 2005/0195686 А 1,Свена Вааджа (Svein Vaage) с сотрудниками "System for Combining Signals of Pressure Sensors and ParticleMotion Sensors in Marine Seismic Streamers" ("Система комбинирования сигналов датчиков давления и датчиков движения частиц в морских сейсмических косах"), опубликованной 8 сент. 2005 г. с соавторами настоящего изобретения; изобретение переуступлено дочерней компании правопреемника прав на настоящее изобретение и включено в настоящий документ посредством ссылки. В данном варианте осуществления зарегистрированный датчиком давления сигнал имеет полосу, включающую диапазон меньших частот и диапазон повышенных частот, а сигнал, зарегистрированный датчиком движения частиц согласно изобретению, имеет полосу, включающую, по меньшей мере, диапазон повышенных частот. Сигнал датчика движения частиц рассчитывается в диапазоне меньших частот по зарегистрированному сигналу датчика давления, тем самым генерируется модельный сигнал датчика движения частиц в диапазоне меньших частот. Этот модельный сигнал датчика движения частиц объединяется в диапазоне меньших частот с зарегистрированным сигналом датчика движения частиц в диапазоне повышенных частот для получения объединенного сигнала датчика движения частиц, имеющего существенно ту же ширину полосы, что и у сигнала, зарегистрированного датчиком давления. Зарегистрированный сигнал датчика давления и объединенный сигнал датчика движения частиц комбинируются для дальнейшей обработки. Согласно изобретению, в качестве датчика движения частиц вместо геофона может также применяться акселерометр. На фиг. 3 показана частотная характеристика 31 акселерометра согласно настоящему изобретению в виде графика зависимости чувствительности в дБ от частоты в Гц. Если на 50 Гц требуется та же чувствительность, что и у геофонов, то ослабление на низких частотах будет таким, как показано на фиг. 3. Наклон перестроенного для скоростей графика частотной характеристики 31 акселерометра дает при низких частотах ослабление в 6 дБ на октаву. Это означает, что в диапазоне частот 1-10-4 016513 Гц достигается ослабление в 15-34 дБ. Таким образом, использование акселерометра также может быть решением проблемы ослабления шумов в датчике движения частиц при низких частотах, но акселерометр ослабляет шумы не так хорошо, как геофоны. В одной из дальнейших разработок настоящего изобретения датчик движения частиц согласно изобретению устанавливается в морской сейсмической косе способом, описанным в патентной заявке США 2005/0194201 А 1, поданной Руне Тенгемном (Rune Tenghamn) и Андре Стенцелем (Andre Stenzel)"Particle Motion Sensor for Marine Seismic Sensor Streamers" ("Датчик движения частиц для морских сейсмических кос") и опубликованной 8 сент. 2005 г.; изобретение переуступлено дочерней компании правопреемника прав на настоящее изобретение и включено в настоящий документ посредством ссылки. В данном варианте осуществления система морских сейсмических датчиков включает кожух датчиков,приспособленный для буксировки судном сейсморазведки в слое воды. Несколько датчиков движения частиц согласно настоящему изобретению подвешены внутри кожуха датчиков с пространственным разнесением вдоль кожуха. Каждый из датчиков движения частиц подвешен в кожухе с помощью по меньшей мере одного устройства смещения. Масса каждого датчика движения частиц и силовой модуль каждого устройства смещения выбраны так, что резонансная частота подвески каждого датчика внутри кожуха датчиков оказывается в пределах выбранного диапазона частот. Подавление механических шумов в косах посредством использования подвески датчиков движения частиц в этом варианте дополняет и усиливает подавление шумов посредством использования датчика движения частиц согласно настоящему изобретению. Улучшение характеристик датчиков движения частиц согласно изобретению обеспечивает повышенное отношение сигнал/шум в зарегистрированных данных по движению частиц и, следовательно, в комбинированных данных по давлению и движению частиц. Это улучшенное разрешение сигнала является преимуществом для любой дальнейшей обработки данных, в которой используются комбинированные данные по давлению и движению частиц. Например, данные по давлению и данные по движению частиц могут быть скомбинированы для получения раздельных восходящей и нисходящей компонент волны, которые могут затем обрабатываться далее, как хорошо известно специалистам по обработке сейсмоданных. Например, восходящая компонента волны может быть использована для получения сейсмических данных, очищенных от волн-спутников, и для ослабления других нежелательных кратных волн в записях сейсмических данных. В другом варианте осуществления настоящего изобретения предлагается способ морской сейсморазведки. На фиг. 4 показана блок-схема, иллюстрирующая этапы осуществления способа согласно изобретению в морской сейсморазведке. На шаге 41 по меньшей мере одну морскую сейсмическую косу буксируют в морской среде. Как правило, при морской сейсморазведке буксируют много морских сейсмических кос. На шаге 42 проводится сбор данных по давлению по меньшей мере от одного датчика давления, установленного по меньшей мере в одной морской сейсмической косе, буксируемой на шаге 41. Как правило, при морской сейсморазведке в каждой из многочисленных морских сейсмических кос устанавливается много датчиков давления. Эти датчики давления могут устанавливаться по одному или группами. Датчики давления, как правило, включают гидрофоны. На шаге 43 проводится сбор данных по движению частиц по меньшей мере от одного датчика движения частиц, установленного по меньшей мере в одной морской сейсмической косе, буксируемой на шаге 41, и размещенного совместно по меньшей мере с одним датчиком давления на шаге 42. Датчик движения частиц выполнен согласно настоящему изобретению так, что имеет резонансную частоту, превышающую 20 Гц. Как правило, при морской сейсморазведке в каждой из многочисленных морских сейсмических кос устанавливается много датчиков движения частиц, которые размещаются совместно с многочисленными датчиками давления. Датчики движения частиц могут устанавливаться по одному или группами. Датчики движения частиц, как правило, включают геофоны. В частности, жесткость пружины и подвешенная инертная масса геофона выбираются так, чтобы их комбинация дала резонансную частоту, превышающую 20 Гц. В альтернативном варианте датчики движения частиц могут включать акселерометры. На шаге 44 данные по давлению, собранные на шаге 42, и данные по движению частиц, собранные на шаге 43, комбинируются для дальнейшей обработки, как хорошо известно специалистам по обработке сейсмоданных. Например, данные по давлению и по движению частиц могут быть скомбинированы для получения очищенных данных морской сейсморазведки. Методики комбинирования данных по давлению и данных по движению частиц для получения очищенных данных морской сейсморазведки хорошо известны специалистам по обработке данных морской сейсморазведки. Следует учитывать, что все предшествующее было лишь подробным описанием конкретных вариантов осуществления настоящего изобретения и что возможны многочисленные изменения, модификации и альтернативы раскрытых здесь вариантов осуществления, не выходящие за объем настоящего изобретения. Таким образом, предшествующее описание не ограничивает объема настоящего изобретения. Напротив, объем настоящего изобретения определяется только пунктами прилагаемой формулы изобретения и эквивалентными признаками.-5 016513 ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система морской сейсморазведки, включающая по меньшей мере одну морскую сейсмическую косу; по меньшей мере один датчик давления, установленный по меньшей мере в одной морской сейсмической косе; по меньшей мере один датчик движения частиц, установленный по меньшей мере в одной морской сейсмической косе и размещенный совместно по меньшей мере с одним датчиком давления,причем по меньшей мере один датчик движения частиц имеет резонансную частоту, превышающую 30 Гц; и вычислительные средства для комбинирования данных по давлению по меньшей мере от одного датчика давления и данных по движению частиц по меньшей мере от одного датчика движения частиц с целью их дальнейшей обработки. 2. Система по п.1, отличающаяся тем, что по меньшей мере один датчик давления включает гидрофон. 3. Система по п.1, отличающаяся тем, что по меньшей мере один датчик движения частиц включает геофон. 4. Система по п.1, отличающаяся тем, что по меньшей мере один датчик движения частиц включает акселерометр. 5. Система по п.3, отличающаяся тем, что комбинация жесткости пружины и подвешенной инертной массы геофона выбрана так, чтобы резонансная частота превышала 30 Гц. 6. Система по п.5, отличающаяся тем, что резонансная частота находится в диапазоне от примерно 30 до примерно 50 Гц. 7. Система по п.1, отличающаяся тем, что включает вычислительные средства для расчета сигнала датчика движения частиц в диапазоне меньших частот по зарегистрированному сигналу датчика давления, тем самым генерирования модельного сигнала датчика движения частиц в диапазоне меньших частот; и вычислительные средства для объединения модельного сигнала датчика движения частиц в диапазоне меньших частот с зарегистрированным сигналом датчика движения частиц в диапазоне частот выше указанного диапазона меньших частот для получения объединенного сигнала датчика движения частиц,имеющего, по существу, ту же ширину полосы, что и у сигнала, зарегистрированного датчиком давления. 8. Система по п.1, отличающаяся тем, что вычислительные средства для комбинирования данных по давлению и данных по движению частиц включают вычислительные средства для генерирования восходящей и нисходящей компонент волны. 9. Способ морской сейсморазведки, включающий следующие шаги: буксируют по меньшей мере одну морскую сейсмическую косу; собирают данные по давлению по меньшей мере от одного датчика давления, установленного по меньшей мере в одной морской сейсмической косе; собирают данные по движению частиц по меньшей мере от одного датчика движения частиц, установленного по меньшей мере в одной морской сейсмической косе и размещенного совместно по меньшей мере с одним датчиком давления, причем по меньшей мере один датчик движения частиц имеет резонансную частоту, превышающую 30 Гц; и комбинируют данные по давлению и данные по движению частиц с целью их дальнейшей обработки. 10. Способ по п.9, отличающийся тем, что по меньшей мере один датчик давления включает гидрофон. 11. Способ по п.9, отличающийся тем, что по меньшей мере один датчик движения частиц включает геофон. 12. Способ по п.9, отличающийся тем, что по меньшей мере один датчик движения частиц включает акселерометр. 13. Способ по п.11, отличающийся тем, что комбинация жесткости пружины и подвешенной инертной массы геофона выбрана так, чтобы резонансная частота превышала 30 Гц. 14. Способ по п.13, отличающийся тем, что резонансная частота находится в диапазоне от примерно 30 до примерно 50 Гц. 15. Способ по п.9, отличающийся тем, что включает следующие шаги: рассчитывают сигнал датчика движения частиц в диапазоне меньших частот по зарегистрированному сигналу датчика давления, тем самым генерируют модельный сигнал датчика движения частиц в диапазоне меньших частот; и объединяют модельный сигнал датчика движения частиц в диапазоне меньших частот с зарегистрированным сигналом датчика движения частиц в диапазоне частот выше указанного диапазона меньших частот для получения объединенного сигнала датчика движения частиц, имеющего, по существу, ту же-6 016513 ширину полосы, что и у сигнала, зарегистрированного датчиком давления. 16. Способ по п.9, отличающийся тем, что комбинирование данных по давлению и данных по движению частиц включает генерирование восходящей и нисходящей компонент волны.
МПК / Метки
МПК: G01V 1/20
Метки: система, способ, морской, сейсморазведки
Код ссылки
<a href="https://eas.patents.su/9-16513-sistema-i-sposob-morskojj-sejjsmorazvedki.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ морской сейсморазведки</a>
Способ и система морской электромагнитной разведки
Номер патента: 13872
Опубликовано: 30.08.2010
Автор: Циолковски Антон
МПК: G01V 3/12
Метки: морской, система, способ, электромагнитной, разведки
Формула / Реферат:
1. Способ определения отклика земли на электромагнитные сигналы в процессе морской электромагнитной разведки малых глубин, включающий установление в воде на малых глубинах источника и по меньшей мере одного приемника; измерение электромагнитного отклика при двух или более различных расстояниях между находящимися под водой источником и приемником; использование одного или более измерений электромагнитного отклика при большем расстоянии, чтобы...
Система и способ установки и поддерживания в заданном положении системы морской разведки и добычи, содержащей камеру с регулируемой плавучестью

Номер патента: 6866
Опубликовано: 28.04.2006
Авторы: Мейдла Эрик Е., Миллхейм Кейт, Кинг Чарльз Х.
МПК: E21B 33/035, E21B 43/01
Метки: установки, добычи, регулируемой, положении, способ, разведки, плавучестью, система, заданном, морской, системы, поддерживания, камеру, содержащей
Формула / Реферат:
1. Система для морской разведки и добычи, содержащая (а) обсадную колонну (2), находящуюся в контакте с подводной скважиной, (б) камеру (9) с регулируемой плавучестью и (в) нижний соединительный компонент (5), установленный между обсадной колонной (2) и камерой (9) с регулируемой плавучестью. 2. Система по п.1, отличающаяся тем, что дополнительно содержит (а) одну или более камер (9) с регулируемой плавучестью или (б) обсадную колонну,...
Комплекс для монтажа морской стационарной платформы и способ транспортировки и монтажа посредством комплекса для монтажа морской стационарной платформы.
Номер патента: 930
Опубликовано: 26.06.2000
Автор: Гржебин Юрий Михайлович
МПК: E02B 17/02
Метки: транспортировки, морской, стационарной, монтажа, способ, комплекса, платформы, комплекс, посредством
Формула / Реферат:
1. Комплекс для монтажа морской стационарной платформы, имеющей корпус и опорные стойки, содержащий понтон с механизмами подъема, отличающийся тем, что понтон выполнен в виде плавучего дока с башнями, а механизмы подъема смонтированы внутри упомянутых башен и снабжены устройствами для закрепления к корпусу платформы. 2. Комплекс для монтажа морской стационарной платформы по п.1, отличающийся тем, что устройства для закрепления к корпусу...
Система для проведения экстренных работ в морской донной скважине
Номер патента: 3966
Опубликовано: 25.12.2003
Автор: Мосс Джефф Х.
МПК: E21B 33/076
Метки: система, скважине, донной, экстренных, проведения, работ, морской
Формула / Реферат:
1. Система для проведения экстренных работ в скважине при обслуживании морских донных скважин или трубопроводов из морского донного местоположения, содержащая устройство доставки инструмента, барабан-держатель устройства доставки инструмента, механизм подачи, поворотный инструментальный магазин, узел противовыбросового превентора, блок питания, устройство для управления донным противовыбросовым превентором, насос для гидравлических испытаний и...
Способ определения солености и плотности морской воды
Номер патента: 15998
Опубликовано: 30.01.2012
Авторы: Ейбоженко Анатолий Владимирович, Барбанель Борис Аронович, Пахарьков Игорь Геннадиевич, Разумеенко Юрий Васильевич
МПК: G01N 29/02
Метки: определения, плотности, солености, воды, способ, морской
Формула / Реферат:
1. Способ определения солености и плотности морской воды на горизонте нахождения подводного объекта, включающий локальное измерение температуры воды на заданной глубине, отличающийся тем, что на горизонте нахождения подводного объекта возбуждают акустическое излучение и измеряют непосредственно скорость звука принятого акустического излучения с помощью импульсно-циклического ультразвукового измерителя скорости звука (1) и по непосредственно...
Предыдущий патент: Курительное изделие с концентричной полой сердцевиной в табачном стержне и капсулой, содержащей ароматизатор и аэрозольобразующие вещества в фильтрующей системе
Следующий патент: Лист крепированной абсорбирующей бумаги, валик для нанесения тиснения на него и способ тиснения
Случайный патент: Способ приготовления препарата на основе нафталановой нефти