Способ локации радиоузла и средства локации радиоузла
Номер патента: 24885
Опубликовано: 31.10.2016
Авторы: Гордеев Денис Евгеньевич, Мощевикин Алексей Петрович, Федоров Александр Анатольевич
Формула / Реферат
1. Способ определения расстояния между радиоузлом (Р2) и двумя другими радиоузлами (Р1, Р3), время распространения радиосигнала между которыми (П4) известно или может быть вычислено по известным данным, в котором посредством Р1 передают прямой радиосигнал (ПР), посредством Р2 и Р3 принимают ПP, посредством Р2 после приема ПР передают ответный радиосигнал (ОР), посредством Р1 и Р3 принимают ОР, при этом посредством Р2 определяют задержку (П2) между приемом ПР и передачей ОР, посредством Р1 определяют задержку (П1) между передачей ПР и приемом ОР, посредством Р3 определяют задержку (П3) между приемом ПР и ОР, после чего с учетом П2 определяют задержку (П5) распространения ПР и/или ОР между Р1 и Р2, а с учетом П5, П2, П3 и П4 определяют задержку (П6) распространения ОР между Р2 и Р3 и вычисляют расстояние между Р1 и Р2 и между Р2 и Р3 соответственно.
2. Способ по п.1, в котором Р2 и Р3 связаны между собой и с вычислительными средствами в единую информационную сеть посредством проводного канала передачи данных.
3. Способ по п.1, в котором после приема ОР способ повторяют с той лишь разницей, что соответствующие функции вместо Р2 выполняет Р3 и наоборот, причем вычисленные расстояния между Р1 и Р2 и между Р2 и Р3 усредняют с соответствующими расстояниями, полученными на предшествующей итерации способа.
4. Способ по п.1, в котором П4 определяют по задержке между прямым и ответным радиосигналами (методом RTT) или методом симметричного двухстороннего двухступенчатого измерения расстояний (SDS-TWR).
5. Способ по п.1, в котором значение П5 уточняют по методу симметричного двухстороннего двухступенчатого измерения расстояний.
6. Способ по п.1, в котором П2 определяют до инициирования обмена прямыми и ответными радиосигналами.
7. Способ по п.1, в котором дополнительно измеряют расстояние между Р2 и радиоузлом (Р4), при этом время распространения радиосигнала между Р4 и Р1 известно или может быть вычислено по известным данным.
8. Способ по п.1, в котором для определения местоположения радиоузла (Р2) после осуществления стадий способа по п.1 его снова повторяют с заменой одного из Р1 или Р3 еще одним другим радиоузлом Р4, время распространения радиосигнала между которым и одним из оных известно или может быть вычислено по известным данным.
9. Система связи, реализующая возможность определения расстояния способом по п.1, в которой P1, P2 и Р3 выполнены с возможностью точного измерения промежутков времени между приемом и/или передачей радиосигналов, в которой Р1 выполнен с возможностью определения задержки (П1) между передачей прямого радиосигнала (ПР) и приемом ответного радиосигнала (ОР), Р3 выполнен с возможностью определения задержки (П3) между приемом ПР и OP, P2 выполнен с возможностью определения задержки (П2) между приемом ПР и передачей ОР либо с возможностью поддержания предварительно заданного значения П2, в которой Р1 и Р3 объединены между собой посредством канала передачи данных в единое информационное пространство с обработчиком задержек, выполненным с возможностью вычисления задержки (П5) распространения ПР и/или ОР между Р1 и Р2 и (с возможностью) вычисления задержки (П6) распространения ОР между Р2 и Р3 с учетом П5, П2, П3 и П4.
10. Система по п.9, в которой обработчик задержек скомпонован в одной интегральной схеме.
11. Система по п.9, в которой обработчик задержек выполнен на основе по меньшей мере одного универсального процессора, ASIC-процессора, DSP-процессора, программируемой логической интегральной схемы (ПЛИС) и/или электронного аналогового вычислительного устройства.
12. Система по п.9, в которой упомянутый канал передачи данных представляет собой проводной канал передачи данных.
13. Система по п.9, в которой упомянутый канал передачи данных представляет собой беспроводной канал передачи данных.
Текст
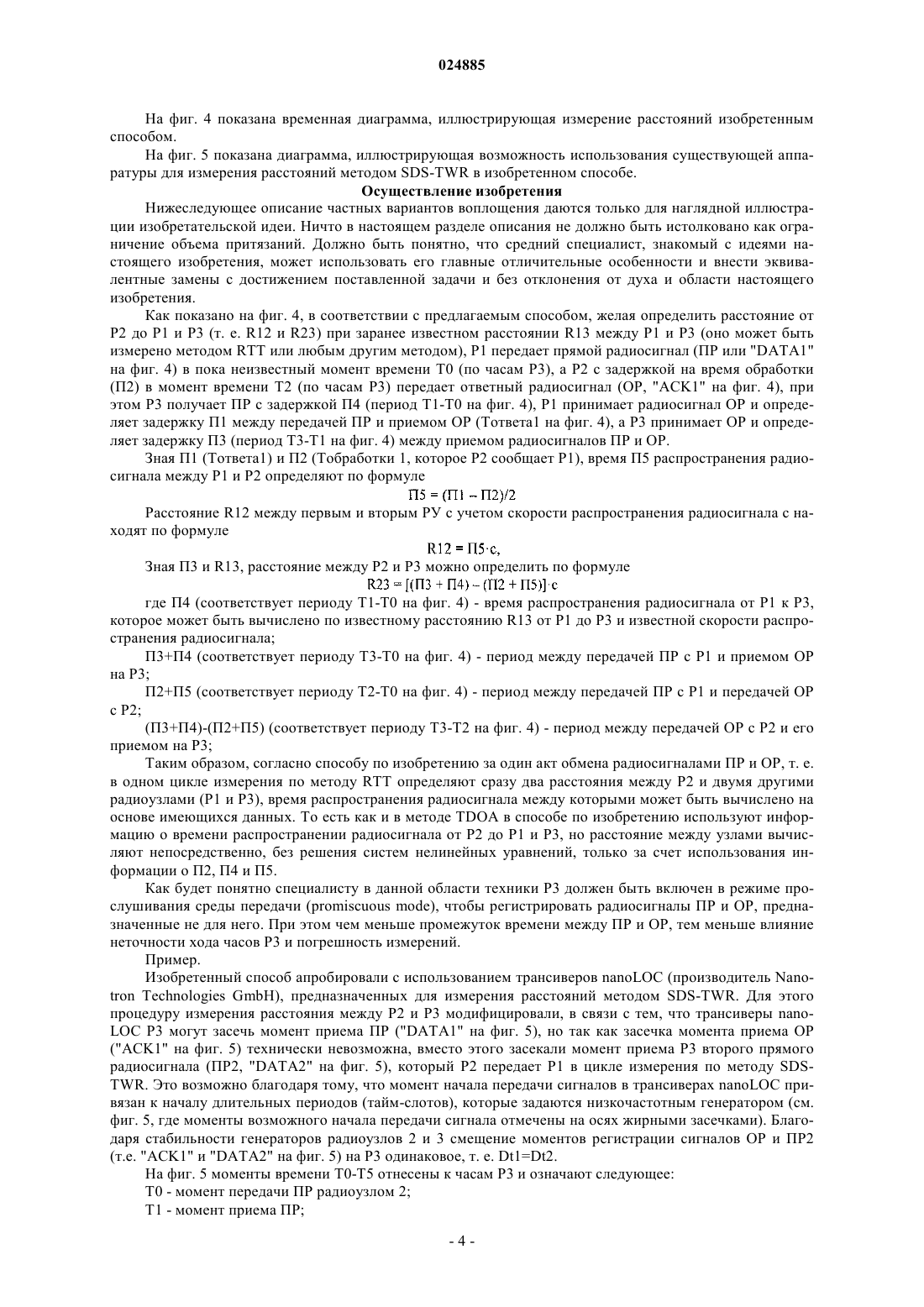
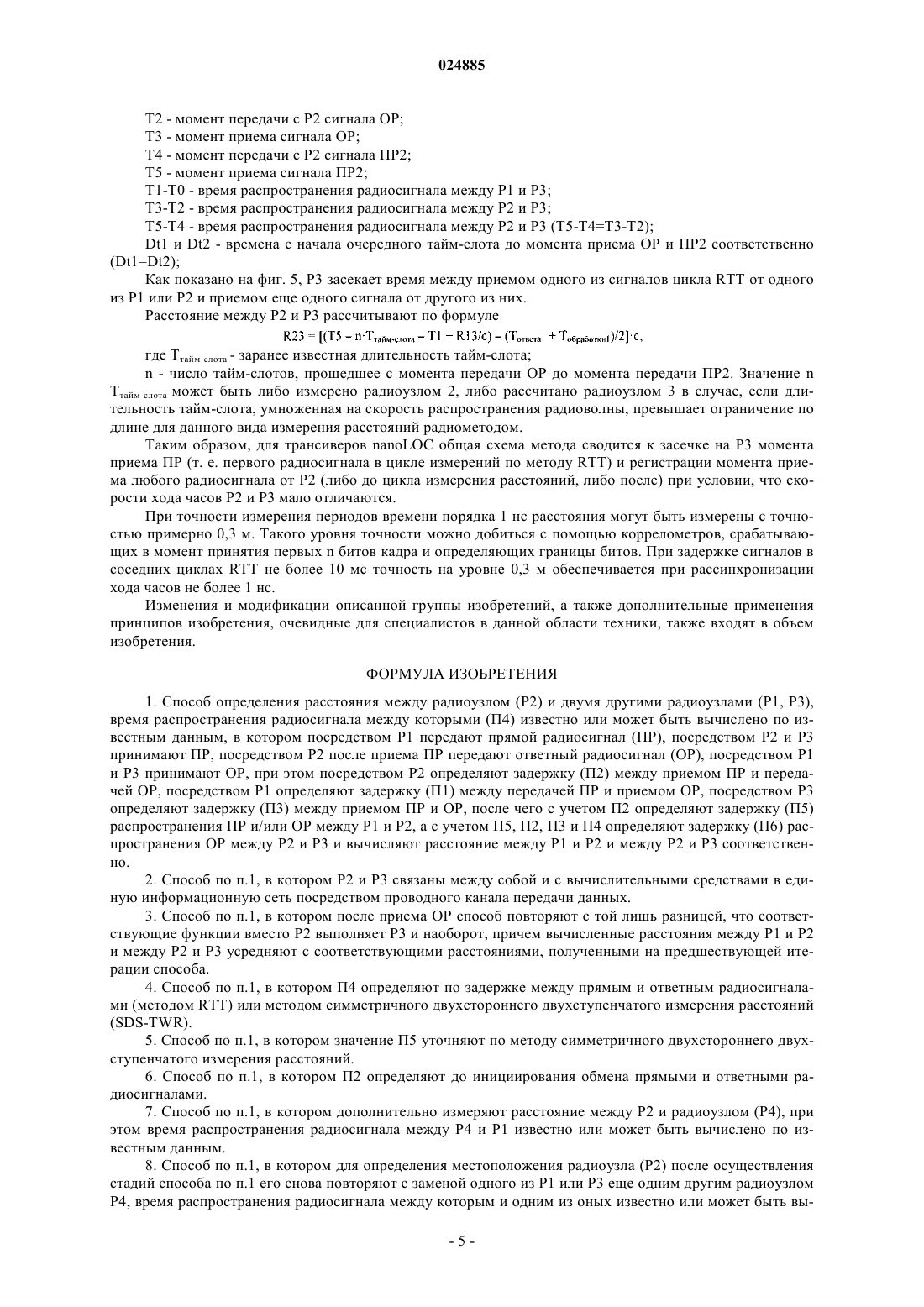
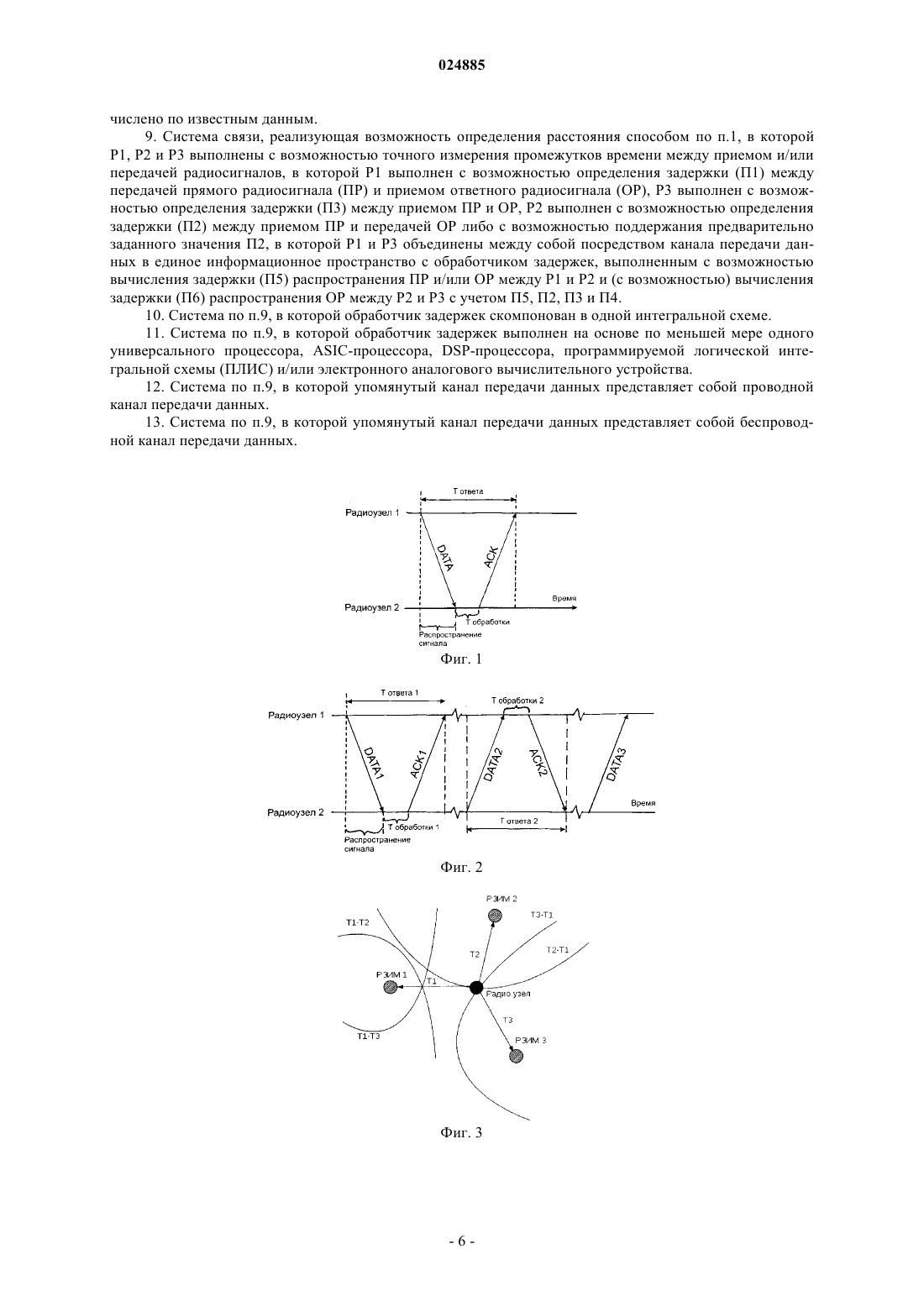
СПОСОБ ЛОКАЦИИ РАДИОУЗЛА И СРЕДСТВА ЛОКАЦИИ РАДИОУЗЛА Группа изобретений относится к беспроводной радиосвязи, а точнее к устройствам и способам для определения местоположения (локации) радиоузла. Предложен способ определения расстояния между радиоузлом (Р 2) и двумя другими радиоузлами (Р 1, Р 3), время распространения радиосигнала между которыми (П 4) известно или может быть вычислено по известным данным,в котором посредством Р 1 передают прямой радиосигнал (ПР), посредством Р 2 и Р 3 принимают ПР, посредством Р 2 после приема ПР передают ответный радиосигнал (ОР), посредством Р 1 и Р 3 принимают ОР, при этом посредством Р 2 определяют задержку (П 2) между приемом ПР и передачей ОР, посредством Р 1 определяют задержку (П 1) между передачей ПР и приемом ОР,посредством Р 3 определяют задержку (П 3) между приемом ПР и ОР, после чего с учетом П 2 определяют задержку (П 5) распространения ПР и/или ОР между Р 1 и Р 2, а с учетом П 5, П 2, П 3 и П 4 определяют задержку (П 6) распространения ОР между Р 2 и Р 3 и вычисляют расстояние между Р 1 и Р 2 и между Р 2 и Р 3 соответственно. Технический результат - повышение точности измерений,упрощение вычислений. Область техники, к которой относится изобретение Настоящая группа изобретений относится к беспроводной радиосвязи и, а точнее, к устройствам и к способам для определения местоположения (локации) радиоузла относительно других радиоузлов. Уровень техники Известны спутниковые системы глобальной навигации (GNSS), например GPS и ГЛОНАСС. Принцип расчета локации основан на измерении задержки распространения короткого радиоимпульса от посылки его радиоузлу с заранее известным местоположением (РЗИМ) до прима его радиоузлом. Зная время распространения радиосигнала (далее "TOF", от англ. "Time of Flight" [время полета]), можно рассчитать расстояние между ними. Для определения трехмерного положения мобильного объекта требуется 4 РЗИМ. Недостаток спутниковых систем глобальной навигации состоит в том, что радиосигналы спутников настолько слабы, что невозможно точное определения координат в помещениях, следовательно, такие системы нельзя использовать для стороннего контроля перемещений радиоузла. Известны способы навигации, в которых для увеличения точности систем глобальной спутниковой навигации используют дополнительные наземные РЗИМ (Assisted GPS (A-GPS), см. Goran M. et al. Geolocation and Assisted GPS, Computer, 2001, 2:123-5). Это позволяет частично устранить проблему локации радиоузлов, расположенных внутри помещений. Общий недостаток всех систем глобального позиционирования состоит в высокой стоимости оборудования, обеспечивающего точную синхронизацию всех РЗИМ по времени. Известны способы локации радиоузлов посредством наземных РЗИМ, не требующие точной синхронизации РЗИМ по времени. В частности, большой популярностью в настоящее время пользуются способы, основанные на измерении мощности входного радиосигнала (сокращенно "RSSI", от англ. "Received Signal Strength Indication", см., например, статью Zhang Jianwu, Zhang Lu, Research on distancemeasurement based on RSSI of ZigBee. Computing, Communication, Control, and Management, 2009, 3(89):210-2). Недостатки способов, основанных на измерении RSSI, связаны с тем, что на измеренную мощность входного радиосигнала сильно влияют условия распространения и способ детектирования радиоволн, в частности анизотропия антенн по направлению радиосигнала, наличие и характер радиопомех (не обязательно в том же частотном диапазоне), особенности рельефа местности, изменение взаимного расположения объектов в зоне локации в процессе измерений (особенно внутри помещений), колебания напряжения питания, изменение атмосферных условий в процессе измерений, покачивания антенн и т. д.(см статью Elnahrawy E., Xiaoyan Li, Martin R.P., The Limits of Localization Using Signal Strength: A Comparative Study. IEEE SECON, October 2004). Действие этих факторов выражается в непредсказуемых флуктуациях мощности радиосигнала (см. там же). Известны способы локации радиоузла посредством наземных РЗИМ, не требующие их точной синхронизации по времени, основанные на точном измерении времени распространения радиосигнала между, по меньшей мере, тремя наземными РЗИМ и радиоузлом (методы, основанные на измерении TOF). В частности, широко известен способ измерения расстояний методом RTT (от англ. "RoundtripTime"), в котором измеряют время (в том числе TOF) распространения радиосигнала от одного радиоузла к другому и в обратном направлении (см. статью Гоголев А., Екимов Д., Екимов К., Мощевикин А., Федоров А., Цыкунов И. "Точность определения расстояний с помощью технологии nanoLoc" Беспроводные технологии, 2008, 2:48-51). Для этого, как показано на фиг. 1, радиоузел 1 передает радиоузлу 2 первый радиосигнал, содержащий запрос на измерение (пакет "DATA"), и фиксирует время передачи; после приема первого радиосигнала радиоузел 2 немедленно передает радиоузлу 1 второй радиосигнал (пакет"ACK") и, наконец, радиоузел 1 фиксирует время приема второго радиосигнала. Считая время обработки радиосигналов обоими радиоузлами одинаковым, время распространения радиосигнала tp обычно вычисляют по формуле где Тответа 1 - время, измеренное радиоузлом 1, с момента передачи первого радиосигнала до момента приема второго радиосигнала,Тобработки 1 - время, измеренное радиоузлом 2, с момента приема первого радиосигнала до момента передачи второго радиосигнала. Расстояние между радиоузлами вычисляют по известной скорости распространения радиосигнала. Недостаток этого способа состоит в том, что точность измерений снижается в связи с невозможностью компенсации разности скорости хода часов (clock drift) в упомянутых радиоузлах (см. вышеупомянутую статью Гоголев А.). Для устранения этого недостатка в опубликованной заявке на патент США 2009/00253439 вышеупомянутый сеанс определения RTT проводят дважды, вначале, как показано на фиг. 2, сеанс измерения инициирует радиоузел 1, а затем - радиоузел 2, после чего рассчитывают усредненное значение времени распространения радиосигнала. Такой способ получил название симметричного двухстороннего двухступенчатого измерения расстояний (SDS-TWR от англ. "Symmetric Double Sided Two Way Ranging",более подробно, см. вышеупомянутую статью Гоголев А. и др.). Недостаток этого способа, препятствующий достижению нижеупомянутого технического результа-1 024885 та, состоит в том, что для локации мобильного радиоузла необходимо измерить расстояние по меньшей мере до трех РЗИМ, для чего требуется произвести по меньшей мере три сеанса измерений. Известны способы локации мобильного радиоузла, не требующие проведения многочисленных сеансов измерений, в которых локацию мобильного радиоузла определяют посредством измерения малой разницы во времени получения одного радиосигнала разными РЗИМ (TDOA, от англ. "Time Difference ofArrival"; см. статью Gustafsson F. and Gunnarsson F., Positioning Using Time-Difference of Arrival Measurements, Department of Electrical Engineering, Linkoping University, SE-581 83 Linkoping, Sweden). Зная время передачи радиосигнала радиоузлом и время его (сигнала) приема РЗИМ и считая скорость хода часов РЗИМ одинаковой, можно измерить точную разность между задержками получения радиосигнала разными РЗИМ. В двумерном случае локации мобильного радиоузла методом РЗИМ определенному значению разности во времени получения радиосигнала двумя РЗИМ с известным местоположением соответствует нахождение мобильного объекта в одной из точек гиперболы. Местоположение радиоузла может быть установлено (см. там же) путем решения систем нелинейных гиперболических уравнений, как показано на фиг. 3. Теоретически для определения местоположения радиоузла требуется меньше радиосигналов, чем в случае RTT. Недостаток TDOA состоит в нелинейности системы уравнений, используемых для определения местоположения (см. статью Ju-Yong Do et al. Robustness of TOA and TDOA Positioning under SuboptimalConditions. 2007), и в сильной зависимости производительности и надежности метода от количества мобильных узлов, условий прима радиосигнала и его переотражений. Раскрытие изобретения В заявленной группе изобретений решается задача сбережения радиоэфира в системах для определения местоположения мобильного радиоузла по измерению задержки между прямым и ответным радиосигналами (методом RTT). Это позволяет освободить радиоканал для передачи полезной информации. Технический результат состоит в повышении точности измерений, и в том, что для определения расстояния между радиоузлами не требуется решение систем нелинейных уравнений, что позволяет упростить конструкцию вычислительных устройств, в частности микроконтроллеров, алгоритмы для определения местоположения мобильного радиоузла и за меньшее количество тактов (т. е. быстрее) вычислять местоположение мобильного объекта на цифровой аппаратной базе общего назначения. В отличие от метода TDOA, точность предлагаемого способа может быть повышена за счет накопления отсчетов в течение периодов измерения (наиболее достоверным считается наименьший из отсчетов, соответствующий радиосигналу, претерпевшему наименьшее количество переотражений). Кроме того, в отличие от метода TDOA, радиоузлы могут осуществлять предлагаемый способ попеременно с небольшими интервалами, что позволяет нивелировать эффект разности в скорости хода часов. Поставленная задача решена благодаря тому, что в способе определения расстояния между радиоузлом (Р 2) и двумя другими радиоузлами (P1, P3), время распространения радиосигнала между которыми (П 4) известно или может быть вычислено по известным данным, посредством Р 1 передают прямой радиосигнал (ПР), посредством Р 2 и Р 3 принимают ПР, посредством Р 2 после приема ПР передают ответный радиосигнал (ОР), посредством Р 1 и Р 3 принимают ОР, при этом посредством Р 2 определяют задержку (П 2) между приемом ПР и передачей ОР, посредством Р 1 определяют задержку (П 1) между передачей ПР и приемом ОР, посредством Р 3 определяют задержку (П 3) между приемом ПР и ОР, после чего с учетом П 2 определяют задержку (П 5) распространения ПР и/или ОР между Р 1 и Р 2, а с учетом П 5,П 2, П 3 и П 4 определяют задержку (П 6) распространения ОР между Р 2 и Р 3, и вычисляют расстояние между Р 1 и Р 2 и между Р 2 и Р 3 соответственно. Следует понимать, что указания "прямой", "ответный", "П 1", "П 2", "П 3", "П 4", "П 5", "П 6", "P1","P2", "Р 3", "ОР", "ПР" являются лишь условными обозначениями и/или сокращениями для соответствующих технических признаков и применяются лишь для краткости изложения и/или для индивидуализации разных, но одинаково называемых элементов. В одной из частных форм осуществления способа Р 2 и Р 3 связаны между собой и с вычислительными средствами в единую информационную сеть посредством проводного канала передачи данных. Как будет очевидно специалисту, точное измерение малых временных интервалов, например между приемом ПР и передачей ОР, может быть обеспечено при размещении средств измерения (часов) в том радиоузле (в данном случае, в Р 2), который осуществляет засечку моментов, временная задержка между которыми измеряется, при этом предпочтительно, чтобы интервалы между событиями отсчитывались посредством одного и того же генератора частоты. Отсчеты задержек, определенные таким образом, могут быть переданы по каналам связи и обработаны за пределами радиоузла. В еще одной частной форме осуществления после приема ОР способ повторяют с той лишь разницей, что соответствующие функции вместо Р 2 выполняет Р 3 и наоборот, причем вычисленные расстояния между Р 1 и Р 2 и между Р 2 и Р 3 усредняют с соответствующими расстояниями, полученными на предшествующей итерации способа. В другой частной форме осуществления П 4 определяют по задержке между прямым и ответным ра-2 024885 диосигналами (методом RTT) или методом симметричного двухстороннего двухступенчатого измерения расстояний (SDS-TWR). В одной частной форме осуществления значение П 5 уточняют по методу симметричного двухстороннего двухступенчатого измерения расстояний. В еще одной частной форме осуществления П 2 определяют до инициирования обмена прямыми и ответными радиосигналами. В другой частной форме осуществления дополнительно измеряют расстояние между Р 2 и радиоузлом Р 4, при этом время распространения радиосигнала между Р 4 и Р 1 известно или может быть вычислено по известным данным. Вышеуказанная задача также решена благодаря тому, что для определения местоположения радиоузла (Р 2), после осуществления любого из вариантов осуществления вышеописанного способа, его (способ) повторяют с заменой одного из Р 1 или Р 3 еще одним другим радиоузлом Р 4, время распространения радиосигнала между которым и одним из оных известно или может быть вычислено по известным данным. Вышеуказанная задача решена благодаря тому, что система для определения расстояния между радиоузлом с неизвестным местоположением Р 2 и по меньшей мере двумя радиоузлами (Р 1, Р 3), время распространения радиосигнала между которыми (П 4) известно или может быть вычислено по известным данным, в котором P1, P2 и Р 3 выполнены с возможностью точного измерения промежутков времени между приемом и/или передачей радиосигналов, в которой Р 1 выполнен с возможностью определения задержки (П 1) между передачей прямого радиосигнала (ПР) и приемом ответного радиосигнала (OP), Р 3 выполнен с возможностью определения задержки (П 3) между приемом ПР и OP, P2 выполнен с возможностью определения задержки (П 2) между приемом ПР и передачей ОР либо с возможностью поддержания предварительно заданного значения П 2, в которой Р 1 и Р 3 объединены между собой посредством канала передачи данных в единое информационное пространство с обработчиком задержек, выполненным с возможностью вычисления задержки (П 5) распространения ПР и/или ОР между Р 1 и Р 2 и (с возможностью) вычисления задержки (П 6) распространения ОР между Р 2 и Р 3 с учетом П 5, П 2, П 3 и П 4. В частной форме выполнения системы обработчик задержек скомпонован в одной интегральной схеме. В одной частной форме выполнения системы обработчик задержек выполнен на основе по меньшей мере одного универсального процессора, ASIC-процессора, DSP-процессора, программируемой логической интегральной схемы (ПЛИС) и/или электронного аналогового вычислительного устройства. В еще одной частной форме выполнения системы упомянутый канал передачи данных представляет собой проводной канал передачи данных. В другой частной форме выполнения системы упомянутый канал передачи данных представляет собой беспроводной канал передачи данных. Следует понимать, что объектам вышеописанной группы изобретений могут быть присущи все или только некоторые из признаков вышеупомянутых частных вариантов осуществления или выполнения,при условии, что они не исключают друг друга, и при том такие комбинации признаков также включены в настоящее раскрытие. Среднему специалисту из описания аналогов и из уровня техники должны быть понятны функции и допустимые варианты выполнения, соединения и расположения вышеупомянутых функциональных элементов, например, должно быть понятно, что вычислительные средства могут быть реализованы на основе операционных усилителей либо на основе программно-аппаратного комплекса, например ЭВМ общего назначения, снабженной программными средствами, обеспечивающими обработку данных. Если какие-то конструктивные элементы и другие признаки, которые, как известно среднему специалисту, необходимы для реализации назначения заявленных изобретений, но специально не упомянуты в формуле изобретения и не раскрыты в описании, то они являются имманентно присущими, а их конкретные варианты выполнения хорошо известны из аналогов и из уровня техники. Заявленная группа изобретений может быть использована для измерения расстояний и определения местоположения (как в реальном времени, так и по восстанавливаемым данным) мобильных радиоузлов относительно других радиоузлов. Для лучшего понимания идей изобретения ниже приводятся иллюстрирующие чертежи, показывающие некоторые частные варианты выполнения элементов изобретений или осуществления способа. Однако, несмотря на то что в настоящем документе изобретение описывают со ссылкой на позиции элементов, показанных на чертежах, не следует приписывать их особенности соответствующим элементам,на которые ссылаются в тексте. Краткое описание чертежей На фиг. 1 показана временная диаграмма, иллюстрирующая принцип измерения расстояния методом RTT. На фиг. 2 показана временная диаграмма, иллюстрирующая измерение расстояний методом SDSTWR. На фиг. 3 показана схема, иллюстрирующая определение местоположения методом TDOA. На фиг. 4 показана временная диаграмма, иллюстрирующая измерение расстояний изобретенным способом. На фиг. 5 показана диаграмма, иллюстрирующая возможность использования существующей аппаратуры для измерения расстояний методом SDS-TWR в изобретенном способе. Осуществление изобретения Нижеследующее описание частных вариантов воплощения даются только для наглядной иллюстрации изобретательской идеи. Ничто в настоящем разделеописания не должно быть истолковано как ограничение объема притязаний. Должно быть понятно, что средний специалист, знакомый с идеями настоящего изобретения, может использовать его главные отличительные особенности и внести эквивалентные замены с достижением поставленной задачи и без отклонения от духа и области настоящего изобретения. Как показано на фиг. 4, в соответствии с предлагаемым способом, желая определить расстояние от Р 2 до Р 1 и Р 3 (т. е. R12 и R23) при заранее известном расстоянии R13 между Р 1 и Р 3 (оно может быть измерено методом RTT или любым другим методом), Р 1 передает прямой радиосигнал (ПР или "DATA1" на фиг. 4) в пока неизвестный момент времени Т 0 (по часам Р 3), а Р 2 с задержкой на время обработки(П 2) в момент времени Т 2 (по часам Р 3) передает ответный радиосигнал (OP, "ACK1" на фиг. 4), при этом Р 3 получает ПР с задержкой П 4 (период Т 1-Т 0 на фиг. 4), Р 1 принимает радиосигнал ОР и определяет задержку П 1 между передачей ПР и приемом ОР (Тответа 1 на фиг. 4), а Р 3 принимает ОР и определяет задержку П 3 (период Т 3-Т 1 на фиг. 4) между приемом радиосигналов ПР и ОР. Зная П 1 (Тответа 1) и П 2 (Тобработки 1, которое Р 2 сообщает Р 1), время П 5 распространения радиосигнала между Р 1 и Р 2 определяют по формуле Расстояние R12 между первым и вторым РУ с учетом скорости распространения радиосигнала с находят по формуле Зная П 3 и R13, расстояние между Р 2 и Р 3 можно определить по формуле где П 4 (соответствует периоду Т 1-Т 0 на фиг. 4) - время распространения радиосигнала от Р 1 к Р 3,которое может быть вычислено по известному расстоянию R13 от Р 1 до Р 3 и известной скорости распространения радиосигнала; П 3+П 4 (соответствует периоду Т 3-Т 0 на фиг. 4) - период между передачей ПР с Р 1 и приемом ОР на Р 3; П 2+П 5 (соответствует периоду Т 2-Т 0 на фиг. 4) - период между передачей ПР с Р 1 и передачей ОР с Р 2;(П 3+П 4)-(П 2+П 5) (соответствует периоду Т 3-Т 2 на фиг. 4) - период между передачей ОР с Р 2 и его приемом на Р 3; Таким образом, согласно способу по изобретению за один акт обмена радиосигналами ПР и ОР, т. е. в одном цикле измерения по методу RTT определяют сразу два расстояния между Р 2 и двумя другими радиоузлами (Р 1 и Р 3), время распространения радиосигнала между которыми может быть вычислено на основе имеющихся данных. То есть как и в методе TDOA в способе по изобретению используют информацию о времени распространении радиосигнала от Р 2 до Р 1 и Р 3, но расстояние между узлами вычисляют непосредственно, без решения систем нелинейных уравнений, только за счет использования информации о П 2, П 4 и П 5. Как будет понятно специалисту в данной области техники Р 3 должен быть включен в режиме прослушивания среды передачи (promiscuous mode), чтобы регистрировать радиосигналы ПР и ОР, предназначенные не для него. При этом чем меньше промежуток времени между ПР и ОР, тем меньше влияние неточности хода часов Р 3 и погрешность измерений. Пример. Изобретенный способ апробировали с использованием трансиверов nanoLOC (производитель Nanotron Technologies GmbH), предназначенных для измерения расстояний методом SDS-TWR. Для этого процедуру измерения расстояния между Р 2 и Р 3 модифицировали, в связи с тем, что трансиверы nanoLOC Р 3 могут засечь момент приема ПР ("DATA1" на фиг. 5), но так как засечка момента приема OP("ACK1" на фиг. 5) технически невозможна, вместо этого засекали момент приема Р 3 второго прямого радиосигнала (ПР 2, "DATA2" на фиг. 5), который Р 2 передает Р 1 в цикле измерения по методу SDSTWR. Это возможно благодаря тому, что момент начала передачи сигналов в трансиверах nanoLOC привязан к началу длительных периодов (тайм-слотов), которые задаются низкочастотным генератором (см. фиг. 5, где моменты возможного начала передачи сигнала отмечены на осях жирными засечками). Благодаря стабильности генераторов радиоузлов 2 и 3 смещение моментов регистрации сигналов ОР и ПР 2(т.е. "ACK1" и "DATA2" на фиг. 5) на Р 3 одинаковое, т. е. Dt1=Dt2. На фиг. 5 моменты времени Т 0-Т 5 отнесены к часам Р 3 и означают следующее: Т 0 - момент передачи ПР радиоузлом 2; Т 1 - момент приема ПР; Т 2 - момент передачи с Р 2 сигнала ОР; Т 3 - момент приема сигнала ОР; Т 4 - момент передачи с Р 2 сигнала ПР 2; Т 5 - момент приема сигнала ПР 2; Т 1-Т 0 - время распространения радиосигнала между Р 1 и Р 3; Т 3-Т 2 - время распространения радиосигнала между Р 2 и Р 3; Т 5-Т 4 - время распространения радиосигнала между Р 2 и Р 3 (Т 5-Т 4=Т 3-Т 2);Dt1 и Dt2 - времена с начала очередного тайм-слота до момента приема ОР и ПР 2 соответственно(Dt1=Dt2); Как показано на фиг. 5, Р 3 засекает время между приемом одного из сигналов цикла RTT от одного из Р 1 или Р 2 и приемом еще одного сигнала от другого из них. Расстояние между Р 2 и Р 3 рассчитывают по формуле где Ттайм-слота - заранее известная длительность тайм-слота;n - число тайм-слотов, прошедшее с момента передачи ОР до момента передачи ПР 2. Значение n Ттайм-слота может быть либо измерено радиоузлом 2, либо рассчитано радиоузлом 3 в случае, если длительность тайм-слота, умноженная на скорость распространения радиоволны, превышает ограничение по длине для данного вида измерения расстояний радиометодом. Таким образом, для трансиверов nanoLOC общая схема метода сводится к засечке на Р 3 момента приема ПР (т. е. первого радиосигнала в цикле измерений по методу RTT) и регистрации момента приема любого радиосигнала от Р 2 (либо до цикла измерения расстояний, либо после) при условии, что скорости хода часов Р 2 и Р 3 мало отличаются. При точности измерения периодов времени порядка 1 нс расстояния могут быть измерены с точностью примерно 0,3 м. Такого уровня точности можно добиться с помощью коррелометров, срабатывающих в момент принятия первых n битов кадра и определяющих границы битов. При задержке сигналов в соседних циклах RTT не более 10 мс точность на уровне 0,3 м обеспечивается при рассинхронизации хода часов не более 1 нс. Изменения и модификации описанной группы изобретений, а также дополнительные применения принципов изобретения, очевидные для специалистов в данной области техники, также входят в объем изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения расстояния между радиоузлом (Р 2) и двумя другими радиоузлами (Р 1, Р 3),время распространения радиосигнала между которыми (П 4) известно или может быть вычислено по известным данным, в котором посредством Р 1 передают прямой радиосигнал (ПР), посредством Р 2 и Р 3 принимают ПР, посредством Р 2 после приема ПР передают ответный радиосигнал (ОР), посредством Р 1 и Р 3 принимают ОР, при этом посредством Р 2 определяют задержку (П 2) между приемом ПР и передачей ОР, посредством Р 1 определяют задержку (П 1) между передачей ПР и приемом ОР, посредством Р 3 определяют задержку (П 3) между приемом ПР и ОР, после чего с учетом П 2 определяют задержку (П 5) распространения ПР и/или ОР между Р 1 и Р 2, а с учетом П 5, П 2, П 3 и П 4 определяют задержку (П 6) распространения ОР между Р 2 и Р 3 и вычисляют расстояние между Р 1 и Р 2 и между Р 2 и Р 3 соответственно. 2. Способ по п.1, в котором Р 2 и Р 3 связаны между собой и с вычислительными средствами в единую информационную сеть посредством проводного канала передачи данных. 3. Способ по п.1, в котором после приема ОР способ повторяют с той лишь разницей, что соответствующие функции вместо Р 2 выполняет Р 3 и наоборот, причем вычисленные расстояния между Р 1 и Р 2 и между Р 2 и Р 3 усредняют с соответствующими расстояниями, полученными на предшествующей итерации способа. 4. Способ по п.1, в котором П 4 определяют по задержке между прямым и ответным радиосигналами (методом RTT) или методом симметричного двухстороннего двухступенчатого измерения расстояний(SDS-TWR). 5. Способ по п.1, в котором значение П 5 уточняют по методу симметричного двухстороннего двухступенчатого измерения расстояний. 6. Способ по п.1, в котором П 2 определяют до инициирования обмена прямыми и ответными радиосигналами. 7. Способ по п.1, в котором дополнительно измеряют расстояние между Р 2 и радиоузлом (Р 4), при этом время распространения радиосигнала между Р 4 и Р 1 известно или может быть вычислено по известным данным. 8. Способ по п.1, в котором для определения местоположения радиоузла (Р 2) после осуществления стадий способа по п.1 его снова повторяют с заменой одного из Р 1 или Р 3 еще одним другим радиоузлом Р 4, время распространения радиосигнала между которым и одним из оных известно или может быть вы-5 024885 числено по известным данным. 9. Система связи, реализующая возможность определения расстояния способом по п.1, в которойP1, P2 и Р 3 выполнены с возможностью точного измерения промежутков времени между приемом и/или передачей радиосигналов, в которой Р 1 выполнен с возможностью определения задержки (П 1) между передачей прямого радиосигнала (ПР) и приемом ответного радиосигнала (ОР), Р 3 выполнен с возможностью определения задержки (П 3) между приемом ПР и OP, P2 выполнен с возможностью определения задержки (П 2) между приемом ПР и передачей ОР либо с возможностью поддержания предварительно заданного значения П 2, в которой Р 1 и Р 3 объединены между собой посредством канала передачи данных в единое информационное пространство с обработчиком задержек, выполненным с возможностью вычисления задержки (П 5) распространения ПР и/или ОР между Р 1 и Р 2 и (с возможностью) вычисления задержки (П 6) распространения ОР между Р 2 и Р 3 с учетом П 5, П 2, П 3 и П 4. 10. Система по п.9, в которой обработчик задержек скомпонован в одной интегральной схеме. 11. Система по п.9, в которой обработчик задержек выполнен на основе по меньшей мере одного универсального процессора, ASIC-процессора, DSP-процессора, программируемой логической интегральной схемы (ПЛИС) и/или электронного аналогового вычислительного устройства. 12. Система по п.9, в которой упомянутый канал передачи данных представляет собой проводной канал передачи данных. 13. Система по п.9, в которой упомянутый канал передачи данных представляет собой беспроводной канал передачи данных.
МПК / Метки
МПК: H04W 64/00, G01S 11/02
Метки: локации, средства, радиоузла, способ
Код ссылки
<a href="https://eas.patents.su/8-24885-sposob-lokacii-radiouzla-i-sredstva-lokacii-radiouzla.html" rel="bookmark" title="База патентов Евразийского Союза">Способ локации радиоузла и средства локации радиоузла</a>
Способ обновления средства обеспечения безопасности программного средства
Номер патента: 10331
Опубликовано: 29.08.2008
Авторы: Чудов Григорий Сергеевич, Курепкин Игорь Анатольевич, Домашев Алексей Владимирович, Леонтьев Сергей Ефимович, Щербаков Андрей Юрьевич, Чернова Наталья Георгиевна
МПК: G06F 11/36, G06F 12/14, G06F 21/22...
Метки: обеспечения, обновления, средства, способ, программного, безопасности
Формула / Реферат:
1. Способ обновления средства обеспечения безопасности программного средства, заключающийся в том, что при запуске защищаемого программного средства получают его перечень контролируемых функций с использованием средства обеспечения безопасности программного средства; по полученному перечню контролируемых функций определяют адреса контролируемых функций в защищаемом программном обеспечении с использованием средства обеспечения безопасности...
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства
Номер патента: 6782
Опубликовано: 28.04.2006
Автор: Сухолитко Валентин Афанасьевич
Метки: местоположения, бедствие, способ, терпящего, средства, поддержки, оператора, транспортного, определения
Формула / Реферат:
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства, заключающийся в том, что формируют базу знаний по набору возможных программ, а также по результатам анализа и опыта исследований аварий и катастроф с помощью экспертной системы оценивают работоспособность оператора транспортного средства, бортового оборудования транспортного средства и работу оператора, прогнозируют аварийные...
Способ определения скорости движения транспортного средства
Номер патента: 18665
Опубликовано: 30.09.2013
Автор: Мацур Игорь Юрьевич
МПК: G01P 3/66, G01S 13/74, G08G 1/052...
Метки: транспортного, средства, определения, способ, движения, скорости
Формула / Реферат:
1. Способ определения скорости движения транспортного средства, заключающийся в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках предполагаемой траектории его движения, с помощью двух или более датчиков обнаружения, установленных в этих точках обнаружения, измерении времени перемещения транспортного средства между этими точками обнаружения, последующем вычислении скорости движения...
Способ обмена голосовыми сообщениями между водителем и пользователем транспортного средства
Номер патента: 13294
Опубликовано: 30.04.2010
Автор: Иванчиков Алексей Анатольевич
МПК: H04W 4/04
Метки: голосовыми, водителем, транспортного, обмена, средства, пользователем, способ, сообщениями, между
Формула / Реферат:
1. Способ обмена голосовыми сообщениями между водителем и пользователем транспортных средств с помощью сетей мобильной связи, включающий прием голосовых сообщений от пользователя, хранение этих сообщений и передачу их водителю, а также установление голосовой связи между водителем и пользователем, отличающийся тем, что регистрируют водителя с координатами его местоположения, принимают сообщения от пользователей, причем вместе с приемом и записью...
Способ изготовления металлического укупорочного средства с отделенным диском и кольцом из единой заготовки укупорочного средства
Номер патента: 16389
Опубликовано: 30.04.2012
Авторы: Данвуди Пол, Рэмси Кристофер Пол
МПК: B21D 51/38, B21D 51/44, B65D 51/14...
Метки: отделенным, кольцом, способ, металлического, диском, единой, укупорочного, средства, заготовки, изготовления
Формула / Реферат:
1. Способ изготовления закручивающегося металлического укупорочного средства, имеющего отделенный диск (10) и окружное кольцо (20), включающий в себя этапыштамповки заготовки (1) укупорочного средства из листа металла, имеющей верхнюю пластину (10) и боковую стенку (20), свисающую с периферийной части верхней пластины (10), иизготовления диска (10') и окружного кольца (20'), оба из которых имеют обрезанную кромку,отличающийся тем, что этап...