Система и способ дистанционного управления перемещением ряда соединенных между собой транспортных средств
Формула / Реферат
1. Система дистанционного управления перемещением по заданному пути ряда соединенных между собой транспортных средств, одно из которых представляет собой механизированное транспортное средство, предназначенное для перемещения указанного ряда транспортных средств, при этом указанная система содержит
по меньшей мере один датчик, размещенный относительно пути и предназначенный для установления местонахождения головного транспортного средства на пути, причем указанный по меньшей мере один датчик размещен на заданном расстоянии от места останова головного транспортного средства и выполнен с возможностью передачи по меньшей мере одного сигнала при установлении местонахождения головного транспортного средства на пути; и
контроллер, выполненный с возможностью приема сигналов от датчика и нахождения в состоянии обмена данными с автономной системой управления механизированного транспортного средства, причем контроллер также выполнен с возможностью передачи сигнала механизированному транспортному средству при установлении датчиком местонахождения головного транспортного средства; при этом система управления механизированного транспортного средства в ответ на указанный сигнал выполнена с возможностью установления максимальной скорости механизированного транспортного средства при его перемещении по пути к месту останова и блокировки любой установки скорости, которая превышает установку максимальной скорости.
2. Система по п.1, в которой механизированное транспортное средство выполнено с возможностью буксировки других транспортных средств и является головным транспортным средством.
3. Система по п.1, в которой механизированное транспортное средство выполнено с возможностью толкания других транспортных средств, при этом головное транспортное средство расположено в противоположном относительно механизированного транспортного средства конце ряда соединенных между собой транспортных средств.
4. Система по п.1, в которой система управления на механизированном транспортном средстве выполнена с возможностью подачи команды остановки головному транспортному средству так, чтобы головное транспортное средство останавливалось на некотором расстоянии от места останова после получения сигнала от контроллера, при этом локомотив не может превысить установленную максимальную скорость при перемещении к месту останова от того места, в котором остановился локомотив.
5. Система по п.1, дополнительно содержащая несколько датчиков, расположенных относительно пути и предназначенных для установления местонахождения транспортного средства в ряду соединенных между собой транспортных средств, которые перемещаются по пути с помощью дистанционно управляемого механизированного транспортного средства, причем датчики расположены на расстоянии друг от друга, а каждый датчик расположен на расстоянии от места останова головного транспортного средства, при этом при установлении местонахождения головного транспортного средства на пути каждый датчик выполнен с возможностью передачи сигнала контроллеру.
6. Система по п.5, в которой указанные несколько датчиков содержат, по меньшей мере, первый датчик и, по меньшей мере, второй датчик, причем первый датчик расположен на расстоянии от места останова, а второй датчик расположен между первым датчиком и местом останова, при этом система управления локомотива выполнена с возможностью введения первой установки максимальной скорости при установлении первым датчиком местонахождения на пути головного транспортного средства и снижения установленной максимальной скорости при установлении вторым датчиком местонахождения на пути головного транспортного средства.
7. Система по п.1, в которой контроллер является компонентом внешней системы дистанционного управления, имеющей интерфейс оператора, который содержит систему ввода, предназначенную для активации контроллера, обеспечивающего установку максимальной скорости, когда датчик устанавливает местонахождение головного транспортного средства на пути, при этом система управления локомотива выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость.
8. Система по п.7, в которой система управления механизированного транспортного средства выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость при перемещении механизированного транспортного средства в первом направлении и с возможностью срабатывать на команды превышать максимальную скорость при перемещении во втором направлении.
9. Система по п.1, в которой контроллер представляет собой отдельный компонент системы дистанционного управления, расположенный на обочине пути и выполненный с возможностью использования оператором для управления перемещением по пути механизированного транспортного средства, а система управления локомотива выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость.
10. Система по п.9, в которой система управления механизированного транспортного средства выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость при перемещении механизированного транспортного средства в одном направлении и с возможностью срабатывать на команды превышать максимальную скорость при перемещении в обратном направлении.
11. Система по п.1, в которой система управления механизированного транспортного средства выполнена с возможностью осуществления доступа к данным, относящимся к идентификации пути, и к данным, относящимся к одной или нескольким установкам максимальной скорости, связанным с одним или несколькими расстояниями, на котором головное транспортное средство находится от места останова.
12. Система по п.11, в которой система управления выполнена с возможностью осуществления доступа к данным, относящимся к месту остановки головного транспортного средства на расстоянии от места останова, и по меньшей мере к одной установке максимальной скорости для перемещения механизированного транспортного средства к месту останова.
13. Система по п.1, в которой механизированное транспортное средство представляет собой локомотив, а другие транспортные средства представляют собой несколько сцепленных друг с другом и с локомотивом железнодорожных вагонов, кроме того, путь представляет собой железнодорожный путь.
14. Система по п.13, в которой локомотив выполнен с возможностью толкания железнодорожных вагонов, а головное транспортное средство представляет собой железнодорожный вагон, расположенный в противоположном относительно локомотива конце ряда соединенных между собой железнодорожных вагонов.
15. Способ управления перемещением поезда, содержащего по меньшей мере один локомотив, толкающий несколько железнодорожных вагонов, причем железнодорожные вагоны содержат головной железнодорожный вагон, соединенный с удаленным от локомотива железнодорожным вагоном, а локомотив имеет автономную систему управления, при этом способ включает
установление местонахождения на железнодорожном пути головного железнодорожного вагона, толкаемого дистанционно управляемым локомотивом от места останова головного железнодорожного вагона на заданное расстояние;
ввод установки максимальной скорости локомотива по сигналу, передаваемому от дистанционного контроллера, чтобы толкать железнодорожные вагоны по железнодорожному пути на указанное расстояние от места, где установлено местонахождение головного железнодорожного вагона на пути, к месту останова.
16. Способ по п.15, в котором дополнительно устанавливают местонахождение головного вагона в нескольких местах пути, причем каждое место находится на заданном расстоянии от места останова, и вводят установку максимальной скорости локомотива каждый раз, когда установлено местонахождение головного вагона на пути по сигналу, в ответ на сигнал, передаваемый от контроллера локомотива.
17. Способ по п.16, в котором при установлении местонахождения устанавливают местонахождение головного железнодорожного вагона в первом местонахождении, которое находится на первом заданном расстоянии от места останова; и устанавливают местонахождение головного железнодорожного вагона во втором местонахождении, которое находится на втором заданном расстоянии от места останова, причем второе заданное расстояние короче первого заданного расстояния; и вводят первую установку максимальной скорости локомотива при его перемещении от первого местонахождения ко второму местонахождению; и вводят вторую установку максимальной скорости после установления местонахождения головного железнодорожного вагона во втором местонахождении, причем максимальная скорость второй установки меньше, чем максимальная скорость первой установки.
18. Способ по п.15, в котором дополнительно останавливают локомотив на заданном расстоянии от места останова по сигналу, переданному от контроллера, когда установлено местонахождение головного железнодорожного вагона на путях.
19. Способ по п.15, в котором дополнительно обеспечивают наличие системы дистанционного управления для управления перемещением поезда по железнодорожному пути, причем система дистанционного управления содержит контроллер, выполненный с возможностью управления перемещением локомотива, когда локомотив толкает и буксирует железнодорожные вагоны, при этом если локомотив толкает вагоны по сигналам, полученным от системы дистанционного управления, то локомотив не может превышать установленную максимальную скорость.
20. Способ по п.19, в котором система дистанционного управления выполнена с возможностью управления превышением локомотивом максимальной скорости, когда локомотив буксирует железнодорожные вагоны от места останова.

Текст
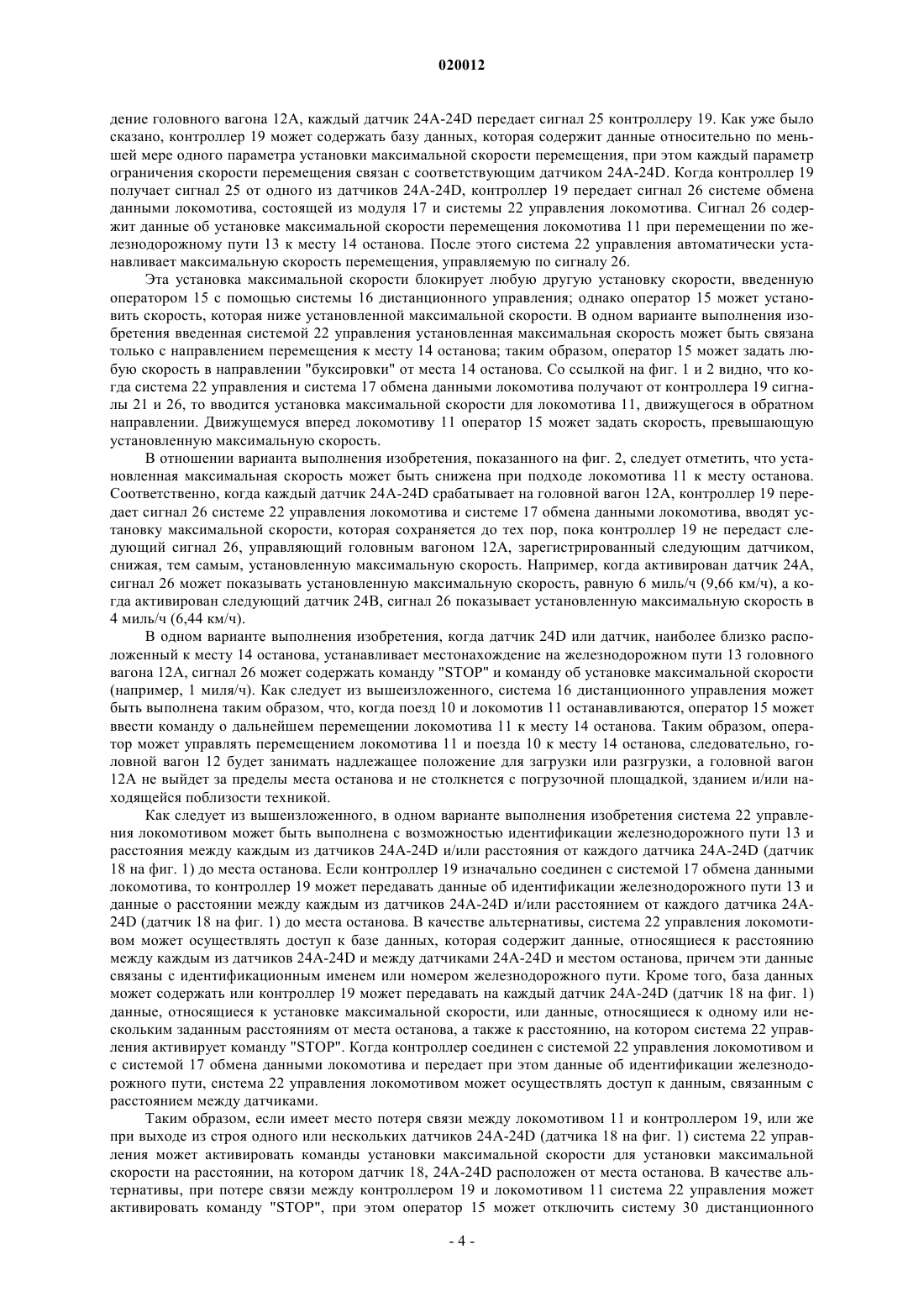
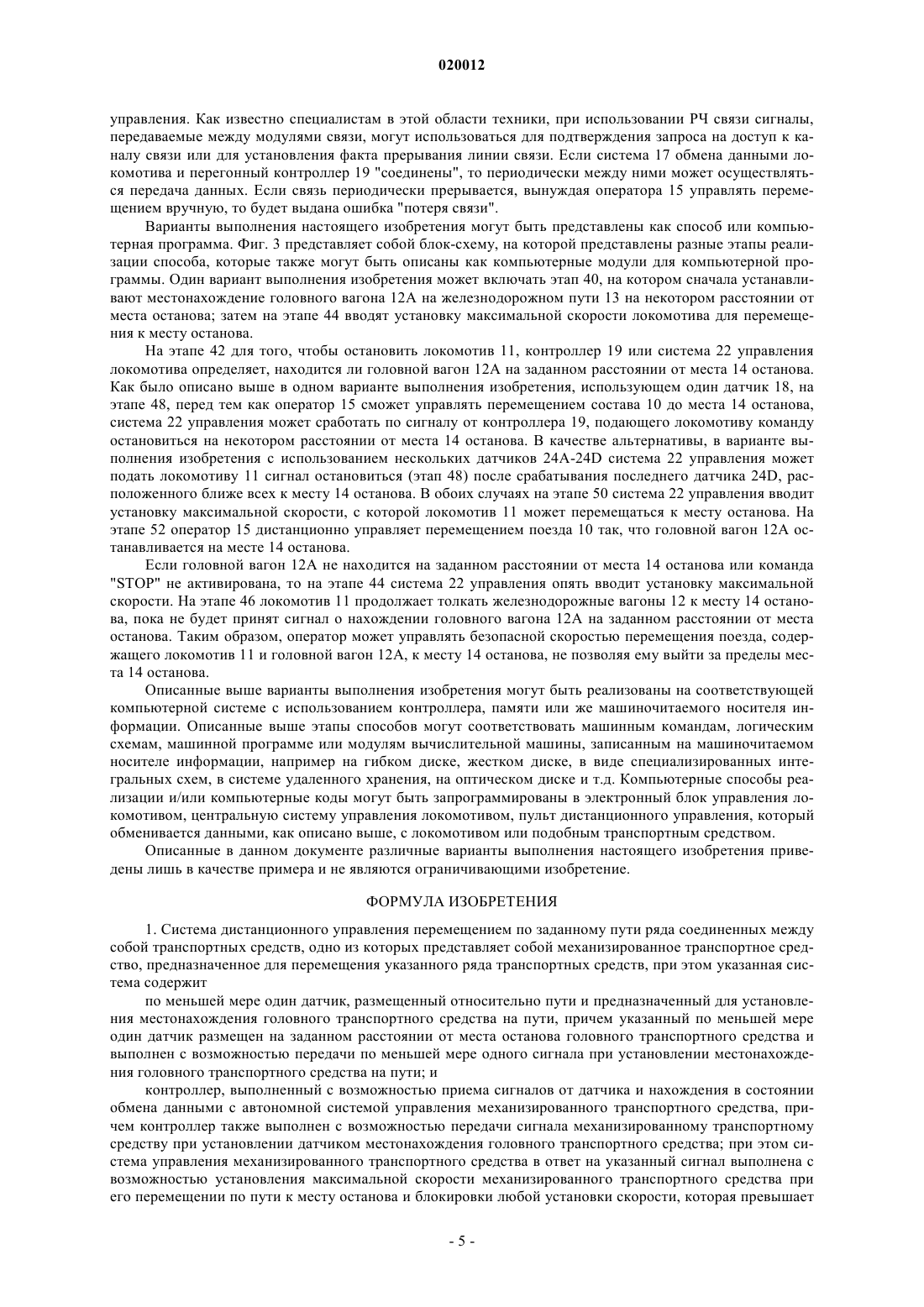
СИСТЕМА И СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РЯДА СОЕДИНЕННЫХ МЕЖДУ СОБОЙ ТРАНСПОРТНЫХ СРЕДСТВ Система дистанционного управления для управления перемещением поезда содержит один или несколько датчиков, размещенных относительно железнодорожного пути и предназначенных для установления местонахождения на железнодорожном пути головного вагона, толкаемого дистанционно управляемым локомотивом. Один или несколько датчиков размещены на расстоянии от заданного места останова головного железнодорожного вагона, при этом датчик передает сигналы, когда установлено местонахождение головного железнодорожного вагона на железнодорожном пути. Контроллер с программным управлением, размещенный вне локомотива или на обочине железнодорожного пути, получает сигналы от одного или нескольких датчиков и находится в состоянии радиосвязи с системой управления локомотива. После установления датчиком местонахождения головного железнодорожного вагона контроллер передает сигнал локомотиву, при этом система управления локомотива по сигналу устанавливает максимальную скорость для локомотива при его перемещении к месту останова. Предпосылки изобретения Варианты выполнения изобретения относятся, в целом, к локомотивам и другим транспортным средствам. Другие варианты выполнения изобретения относятся к управлению перемещением локомотивов и других транспортных средств. Когда железнодорожный вагон поезда (поезд может содержать один или несколько локомотивов и несколько железнодорожных вагонов) достигает пункта назначения, то для разгрузки груза из железнодорожного вагона оператор локомотива должен остановить его таким образом, чтобы железнодорожный вагон располагался в заранее заданном месте останова. С помощью устройства дистанционного управления оператор локомотива может дистанционно управлять перемещением локомотива и железнодорожных вагонов. Такие устройства дистанционного управления содержат интерфейс оператора, позволяющий оператору передавать команды на подчиненный блок управления локомотива, связанный с системой управления локомотива. Как правило, эти команды касаются параметров перемещения локомотива, например направления перемещения, скорости, торможения. С помощью радиочастотной связи (РЧ) система дистанционного управления осуществляет связь с системой управления локомотива и/или с подчиненным блоком управления. В заявке на патент США 2005/125113 описана система дистанционного управления для локомотивов, содержащая датчик, расположенный на борту локомотива, для обеспечения локомотива необходимой информацией. Однако оператор часто задает локомотиву слишком большую скорость перемещения, поэтому локомотив не может остановить головной вагон до того, как тот минует заданное место останова. В результате поезд может столкнуться с погрузочными площадками, находящейся поблизости техникой и/или повредить их и/или сами железнодорожные вагоны. Для управления перемещением поездов на грузовых железнодорожных станциях используется радиочастотная идентификация (РЧИ) или знаки и считыватели для автоматической идентификации оборудования (АИО). Иногда на путях между рельсами устанавливают специально запрограммированные знаки РЧИ или АИО, предназначенные для определения предельной скорости перемещения и пунктов останова локомотива при буксировании вагонов локомотивом. Для считывания знаков на локомотиве имеется РЧИ или считывающая система для АИО. Этот способ управления железнодорожным транспортным средством не приемлем для доставки вагонов в промзоны, где локомотив перемещает вагоны,толкая или буксируя их. Железнодорожные вагоны не могут быть фактически оборудованы РЧИ считывателем, поскольку требуются наличие источника питания и канал для радиосвязи с локомотивом. Кроме того, железнодорожные пути на грузовых железнодорожных станциях и других пунктах назначения зачастую находятся в плохом состоянии; поэтому применение устройств, устанавливающихся на железнодорожных путях, таких как цепи сопротивления, не практикуется. Сущность изобретения В настоящем изобретении представлена система дистанционного управления, определенная в п.1 формулы изобретения, и способ, определенный в п.15 формулы изобретения. Варианты выполнения изобретения относятся к системам и способам управления перемещением ряда соединенных между собой транспортных средств, перемещающихся по назначенному пути. Одним из таких транспортных средств является механизированное транспортное средство, предназначенное для перемещения ряда других транспортных средств. Для установления местонахождения головного транспортного средства по меньшей мере один датчик размещен относительно пути, а еще один датчик размещен на некотором расстоянии от места останова головного транспортного средства. После установления местонахождения головного транспортного средства на пути датчик передает по меньшей мере один сигнал. Получающий сигналы от датчика контроллер находится в состоянии обмена данными с системой управления механизированного транспортного средства. После установления датчиком местонахождения головного транспортного средства контроллер передает сигнал механизированному транспортному средству; в ответ на сигнал система управления устанавливает максимальную скорость для механизированного транспортного средства при его перемещении по пути к месту останова. В другом варианте выполнения система может содержать несколько датчиков, размещенных относительно пути на определенном расстоянии друг от друга и от места останова головного транспортного средства. Когда головное транспортное средство подходит к месту останова, каждый раз, когда датчик регистрирует местоположение головного транспортного средства на пути, контроллер передает сигнал механизированному транспортному средству. Каждый раз, когда датчик регистрирует местоположение головного транспортного средства на пути, система управления механизированного транспортного средства устанавливает максимальную скорость указанного механизированного транспортного средства в ответ на указанный сигнал. Когда головное транспортное средство приближается к месту останова, максимальная скорость снижается и последующие датчики блокируются. В последнем датчике или в датчике, наиболее близко расположенном к месту останова, контроллер передает сигнал, в ответ на который механизированное транспортное средство останавливается на некотором расстоянии от места останова,при этом для перемещения к месту останова механизированного транспортного средства система управления устанавливает максимальную скорость механизированного транспортного средства. Краткое описание фигур Сущность настоящего изобретения и его преимущества будут более ясны из приведенного ниже подробного описания с приложенными чертежами, на которых: фиг. 1 представляет собой схематический чертеж первого варианта выполнения изобретения; фиг. 2 представляет собой схематический чертеж второго варианта выполнения изобретения; фиг. 3 представляет собой блок-схему, изображающую последовательность операций способа, в соответствии с вариантом выполнения изобретения. Подробное описание изобретения Более подробное описание изобретения, кратко описанное выше, будет теперь представлено в отношении конкретных вариантов выполнения этого изобретения, которые проиллюстрированы на приложенных чертежах. Следует понимать, что эти чертежи изображают только типичные варианты выполнения изобретения, и поэтому их не следует понимать как ограничивающие объем изобретения, поэтому изобретение будет описано и объяснено применительно к локомотиву, толкающему несколько вагонов по железнодорожному пути. Однако изобретение не только не ограничено, но и включает, в том числе,дистанционное управление перемещением ряда соединенных между собой транспортных средств, содержащих механизированное транспортное средство, которое толкает или буксирует другие транспортные средства по заданному пути. Соответственно, изобретение может быть применено к внедорожным транспортным средствам, морским транспортным средствам, дорожно-транспортным средствам и т.д. Используемый в документе термин "механизированное транспортное средство" относится к транспортным средствам с бортовым или автономным источником мощности, достаточным для приведения в движение транспортного средства и других единиц в ряду транспортных средств. В случае поездов, перемещающихся по железнодорожным путям, механизированным транспортным средством является локомотив. Если локомотив буксирует железнодорожные вагоны, то локомотив является также "головным транспортным средством" или "головным железнодорожным вагоном", как описано ниже. Если локомотив толкает железнодорожные вагоны, головным вагоном является вагон, расположенный в противоположном от локомотива конце поезда. Прежде чем подробно описывать в соответствии с настоящим изобретением конкретный способ и устройство дистанционного управления перемещением поезда или ряда соединенных между собой транспортных средств, следует отметить, что настоящее изобретение относится, главным образом, к новой комбинации элементов аппаратного и программного обеспечения, относящихся к указанному способу и устройству. Таким образом, чтобы не перегружать описание изобретения конструктивными элементами и для облегчения понимания предмета изобретения специалистами с учетом настоящего описания,элементы аппаратного и программного обеспечения были показаны на фигурах с помощью традиционных элементов, показывающих только те конкретные детали, которые имеют отношение к настоящему изобретению. Фиг. 1 схематически изображает поезд 10, содержащий локомотив 11, толкающий несколько железнодорожных вагонов 12. Железнодорожные вагоны 12 содержат головной вагон 12 А, который расположен в удаленном от локомотива 11 конце поезда 10. Локомотив 11 толкает железнодорожные вагоны 12 (в том числе головной вагон 12 А) по железнодорожному пути 13 к месту 14 останова, в котором головной вагон 12 А должен остановиться для разгрузки или погрузки. Для разгрузки или погрузки железнодорожного вагона 12 железнодорожный путь 13 оборудован местом 14 останова и соединен с главным путем (не показан). Оператор 15 дистанционно управляет локомотивом 11 с помощью портативной системы 16 дистанционного управления, которая содержит интерфейс оператора с различными системами ввода, позволяющими оператору вводить команды, относящиеся к перемещению локомотива 11 и поезда 10. Портативная система 16 дистанционного управления связана с радиочастотным модулем 17 (относится к блоку системы радиосвязи) локомотива 11, который является элементом радиосвязи и элементом системы распределения электроэнергии локомотива 11. Например, вводя команды в систему 16 дистанционного управления, оператор может управлять скоростью, остановкой и направлением хода локомотива 11. Чтобы управлять перемещением локомотива 11 и поезда 10 по железнодорожному пути 13, оператор 15 с помощью системы 16 дистанционного управления передает команды системе 22 управления локомотива. В одном варианте выполнения изобретения система 30 дистанционного управления используется для ограничения скорости локомотива 11 при приближении головного вагона 12 А к месту 14 останова; таким образом, оператор 15 может остановить поезд 10 так, чтобы головной вагон 12 А остановился в месте 14 останова. Система 30 дистанционного управления содержит датчик 18, расположенный относительно железнодорожного пути 13 и предназначенный для установления местонахождения головного вагона 12 А на железнодорожном пути 13. Датчик 18, предназначенный для установления местонахождения головного вагона 12 на заданном расстоянии от места 14 останова, может быть установлен на железнодорожном пути 13, например на шпалах или на обочине железнодорожного пути 13. Когда датчик 18 устанавливает местонахождение головного вагона 12 А на железнодорожном пути 13, датчик 18 передает сигнал 20 дистанционному контроллеру 19. В ответ на полученный от датчика 18 сигнал 20 контроллер 19 передает сигнал 21 локомотиву 11. Сигнал 21 представляет собой указание на команду или установку,-2 020012 которая управляет перемещением поезда 10 по железнодорожному пути. Таким образом, для перемещения по железнодорожному пути 13 к месту 14 останова управляемая по сигналу 21 система 22 управления локомотивом устанавливает максимальную скорость локомотива 11. Кроме того, система 22 управления может задавать локомотиву 11 команду остановиться на железнодорожном пути 13, а оператор 15 может дистанционно управлять перемещением локомотива 11 и поезда 10 к месту 14 останова; однако, оператор 15 (с помощью системы 16 дистанционного управления) не позволяет локомотиву 11 двигаться на скорости, превышающей максимальную установленную скорость. В таком варианте выполнения, если в ответ на полученную от контроллера 19 команду 21 система 22 управления локомотива 11 отдает команду локомотиву 11 остановиться, то система 16 дистанционного управления может быть выполнена с возможностью ввода оператором 15 команды до начала перемещения локомотива 11 по железнодорожному пути 13. Например, система 16 дистанционного управления может содержать механизм ввода команды "STOP", которая при выполнении позволяет оператору 15 приводить локомотив 11 и поезд 10 в движение к месту 14 останова. В одном варианте выполнения настоящего изобретения датчик 18 представляет собой электрооптический датчик, например светопропускающий датчик или светоотражающий датчик, непосредственно подключенный посредством проводов к контроллеру 19, размещенному в блоке управления. Для осуществления обмена данными и для передачи сигналов к системе 17 связи локомотива 11 контроллер 19 может содержать радиочастотный модуль 23. В качестве альтернативы, для передачи сигналов контроллеру 19 в датчике 18 может использоваться беспроводная связь. В другом варианте выполнения изобретения контроллер 19 может быть выполнен встроенным в систему 16 дистанционного управления или быть ее комплектующим. В любом случае, в системе 16 дистанционного управления имеется интерфейс оператора, позволяющий оператору 15 активировать систему таким образом, чтобы система 22 управления локомотива 11 после срабатывания датчика 18 головного вагона 12 А не могла срабатывать на команды установки скорости, превышающей максимальную скорость локомотива 11. Для перемещающегося по железнодорожному пути 13 любого поезда 10 и локомотива 11 выбранные установки скорости могут быть произвольными, например 1 миля/ч (1,61 км/ч); или же контроллер 19 и/или система 22 управления локомотивом могут быть запрограммированы для определения установок максимальной скорости для данного поезда 10. Если оператор 15 включает систему или активирует контроллер 19, то для определения установок максимальной скорости контроллер 19 может запросить оператора 15 ввести данные локомотива 11 и поезда 10, например тоннаж. Кроме того, для определения установок скорости контроллер 19 или система 22 управления локомотивом может иметь алгоритм, учитывающий расстояние, которое должен пройти головной вагон 12 А до места 14 останова, а также и уклон железнодорожного пути 13. В одном варианте выполнения изобретения, когда головной вагон 12 А въезжает на железнодорожный путь 13, оператор активирует контроллер 19 для связи контроллера 19 с системой 17 обмена данными локомотива и с системой 22 управления локомотива. На грузовых железнодорожных станциях для радиосвязи между удаленными средствами управления (такими, как блок дистанционного управления) и средствами управления локомотива обычно используются радиочастотные системы связи. Таким образом, частично учитывая диапазон частот системы связи, специалистам должно быть ясно, каким образом перегонный контроллер может быть соединен с системой обмена данными локомотива. Если контроллер 19 соединен с системой 17 обмена данными локомотива и с системой 22 управления локомотива, то с помощью радиосигнала контроллер может передавать данные от путевого идентификатора. Система 22 управления может содержать базу данных, которая содержит данные о местонахождении или идентификатор датчика 18 на железнодорожном пути 13 (или, как описано ниже, нескольких датчиков), а также данные об одном или нескольких параметрах установки максимальной скорости перемещения, связанных с каждым датчиком 18. Соответственно, когда система 22 управления получает сигнал 21 об установлении местонахождения головного вагона на железнодорожном пути 13, система 22 управления осуществляет доступ к базе данных для определения, выбора или подачи команды об установке максимальной скорости, связанной с этим датчиком 18. В качестве альтернативы, контроллер 19 может быть запрограммирован и/или выполнен так, чтобы сигнал 21 содержал команду на установку максимальной скорости. Контроллер 19 может осуществлять доступ к базе данных (не показана), которая содержит одну из установок максимальной скорости, связанную с датчиком 18, или же одну или несколько установок максимальной скорости, связанных с каждым из нескольких датчиков (как описано ниже). Когда датчик 18 устанавливает местонахождение головного вагона 12 А на железнодорожном пути 13, контроллер с помощью модуля 23 передает сигнал или команду для установки максимальной скорости локомотива 11 при перемещении по железнодорожному пути к месту 14 останова. Показанный на фиг. 2 второй вариант выполнения изобретения содержит несколько датчиков 24 А 24D, размещенных относительно железнодорожного пути 13 и предназначенных для установления местонахождения головного вагона 12 А на железнодорожном пути 13. Как видно на фигуре, датчики 24A24D расположены на определенном расстоянии друг от друга, при этом каждый из них расположен на заданном расстоянии от места 14 останова головного вагона 12 А. Как только установлено местонахож-3 020012 дение головного вагона 12 А, каждый датчик 24A-24D передает сигнал 25 контроллеру 19. Как уже было сказано, контроллер 19 может содержать базу данных, которая содержит данные относительно по меньшей мере одного параметра установки максимальной скорости перемещения, при этом каждый параметр ограничения скорости перемещения связан с соответствующим датчиком 24A-24D. Когда контроллер 19 получает сигнал 25 от одного из датчиков 24 А-24D, контроллер 19 передает сигнал 26 системе обмена данными локомотива, состоящей из модуля 17 и системы 22 управления локомотива. Сигнал 26 содержит данные об установке максимальной скорости перемещения локомотива 11 при перемещении по железнодорожному пути 13 к месту 14 останова. После этого система 22 управления автоматически устанавливает максимальную скорость перемещения, управляемую по сигналу 26. Эта установка максимальной скорости блокирует любую другую установку скорости, введенную оператором 15 с помощью системы 16 дистанционного управления; однако оператор 15 может установить скорость, которая ниже установленной максимальной скорости. В одном варианте выполнения изобретения введенная системой 22 управления установленная максимальная скорость может быть связана только с направлением перемещения к месту 14 останова; таким образом, оператор 15 может задать любую скорость в направлении "буксировки" от места 14 останова. Со ссылкой на фиг. 1 и 2 видно, что когда система 22 управления и система 17 обмена данными локомотива получают от контроллера 19 сигналы 21 и 26, то вводится установка максимальной скорости для локомотива 11, движущегося в обратном направлении. Движущемуся вперед локомотиву 11 оператор 15 может задать скорость, превышающую установленную максимальную скорость. В отношении варианта выполнения изобретения, показанного на фиг. 2, следует отметить, что установленная максимальная скорость может быть снижена при подходе локомотива 11 к месту останова. Соответственно, когда каждый датчик 24A-24D срабатывает на головной вагон 12 А, контроллер 19 передает сигнал 26 системе 22 управления локомотива и системе 17 обмена данными локомотива, вводят установку максимальной скорости, которая сохраняется до тех пор, пока контроллер 19 не передаст следующий сигнал 26, управляющий головным вагоном 12 А, зарегистрированный следующим датчиком,снижая, тем самым, установленную максимальную скорость. Например, когда активирован датчик 24 А,сигнал 26 может показывать установленную максимальную скорость, равную 6 миль/ч (9,66 км/ч), а когда активирован следующий датчик 24 В, сигнал 26 показывает установленную максимальную скорость в 4 миль/ч (6,44 км/ч). В одном варианте выполнения изобретения, когда датчик 24D или датчик, наиболее близко расположенный к месту 14 останова, устанавливает местонахождение на железнодорожном пути 13 головного вагона 12 А, сигнал 26 может содержать команду "STOP" и команду об установке максимальной скорости(например, 1 миля/ч). Как следует из вышеизложенного, система 16 дистанционного управления может быть выполнена таким образом, что, когда поезд 10 и локомотив 11 останавливаются, оператор 15 может ввести команду о дальнейшем перемещении локомотива 11 к месту 14 останова. Таким образом, оператор может управлять перемещением локомотива 11 и поезда 10 к месту 14 останова, следовательно, головной вагон 12 будет занимать надлежащее положение для загрузки или разгрузки, а головной вагон 12 А не выйдет за пределы места останова и не столкнется с погрузочной площадкой, зданием и/или находящейся поблизости техникой. Как следует из вышеизложенного, в одном варианте выполнения изобретения система 22 управления локомотивом может быть выполнена с возможностью идентификации железнодорожного пути 13 и расстояния между каждым из датчиков 24 А-24D и/или расстояния от каждого датчика 24 А-24D (датчик 18 на фиг. 1) до места останова. Если контроллер 19 изначально соединен с системой 17 обмена данными локомотива, то контроллер 19 может передавать данные об идентификации железнодорожного пути 13 и данные о расстоянии между каждым из датчиков 24 А-24D и/или расстоянием от каждого датчика 24 А 24D (датчик 18 на фиг. 1) до места останова. В качестве альтернативы, система 22 управления локомотивом может осуществлять доступ к базе данных, которая содержит данные, относящиеся к расстоянию между каждым из датчиков 24 А-24D и между датчиками 24 А-24D и местом останова, причем эти данные связаны с идентификационным именем или номером железнодорожного пути. Кроме того, база данных может содержать или контроллер 19 может передавать на каждый датчик 24 А-24D (датчик 18 на фиг. 1) данные, относящиеся к установке максимальной скорости, или данные, относящиеся к одному или нескольким заданным расстояниям от места останова, а также к расстоянию, на котором система 22 управления активирует команду "STOP". Когда контроллер соединен с системой 22 управления локомотивом и с системой 17 обмена данными локомотива и передает при этом данные об идентификации железнодорожного пути, система 22 управления локомотивом может осуществлять доступ к данным, связанным с расстоянием между датчиками. Таким образом, если имеет место потеря связи между локомотивом 11 и контроллером 19, или же при выходе из строя одного или нескольких датчиков 24 А-24D (датчика 18 на фиг. 1) система 22 управления может активировать команды установки максимальной скорости для установки максимальной скорости на расстоянии, на котором датчик 18, 24A-24D расположен от места останова. В качестве альтернативы, при потере связи между контроллером 19 и локомотивом 11 система 22 управления может активировать команду "STOP", при этом оператор 15 может отключить систему 30 дистанционного управления. Как известно специалистам в этой области техники, при использовании РЧ связи сигналы,передаваемые между модулями связи, могут использоваться для подтверждения запроса на доступ к каналу связи или для установления факта прерывания линии связи. Если система 17 обмена данными локомотива и перегонный контроллер 19 "соединены", то периодически между ними может осуществляться передача данных. Если связь периодически прерывается, вынуждая оператора 15 управлять перемещением вручную, то будет выдана ошибка "потеря связи". Варианты выполнения настоящего изобретения могут быть представлены как способ или компьютерная программа. Фиг. 3 представляет собой блок-схему, на которой представлены разные этапы реализации способа, которые также могут быть описаны как компьютерные модули для компьютерной программы. Один вариант выполнения изобретения может включать этап 40, на котором сначала устанавливают местонахождение головного вагона 12 А на железнодорожном пути 13 на некотором расстоянии от места останова; затем на этапе 44 вводят установку максимальной скорости локомотива для перемещения к месту останова. На этапе 42 для того, чтобы остановить локомотив 11, контроллер 19 или система 22 управления локомотива определяет, находится ли головной вагон 12 А на заданном расстоянии от места 14 останова. Как было описано выше в одном варианте выполнения изобретения, использующем один датчик 18, на этапе 48, перед тем как оператор 15 сможет управлять перемещением состава 10 до места 14 останова,система 22 управления может сработать по сигналу от контроллера 19, подающего локомотиву команду остановиться на некотором расстоянии от места 14 останова. В качестве альтернативы, в варианте выполнения изобретения с использованием нескольких датчиков 24 А-24D система 22 управления может подать локомотиву 11 сигнал остановиться (этап 48) после срабатывания последнего датчика 24D, расположенного ближе всех к месту 14 останова. В обоих случаях на этапе 50 система 22 управления вводит установку максимальной скорости, с которой локомотив 11 может перемещаться к месту останова. На этапе 52 оператор 15 дистанционно управляет перемещением поезда 10 так, что головной вагон 12 А останавливается на месте 14 останова. Если головной вагон 12 А не находится на заданном расстоянии от места 14 останова или команда"STOP" не активирована, то на этапе 44 система 22 управления опять вводит установку максимальной скорости. На этапе 46 локомотив 11 продолжает толкать железнодорожные вагоны 12 к месту 14 останова, пока не будет принят сигнал о нахождении головного вагона 12 А на заданном расстоянии от места останова. Таким образом, оператор может управлять безопасной скоростью перемещения поезда, содержащего локомотив 11 и головной вагон 12 А, к месту 14 останова, не позволяя ему выйти за пределы места 14 останова. Описанные выше варианты выполнения изобретения могут быть реализованы на соответствующей компьютерной системе с использованием контроллера, памяти или же машиночитаемого носителя информации. Описанные выше этапы способов могут соответствовать машинным командам, логическим схемам, машинной программе или модулям вычислительной машины, записанным на машиночитаемом носителе информации, например на гибком диске, жестком диске, в виде специализированных интегральных схем, в системе удаленного хранения, на оптическом диске и т.д. Компьютерные способы реализации и/или компьютерные коды могут быть запрограммированы в электронный блок управления локомотивом, центральную систему управления локомотивом, пульт дистанционного управления, который обменивается данными, как описано выше, с локомотивом или подобным транспортным средством. Описанные в данном документе различные варианты выполнения настоящего изобретения приведены лишь в качестве примера и не являются ограничивающими изобретение. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система дистанционного управления перемещением по заданному пути ряда соединенных между собой транспортных средств, одно из которых представляет собой механизированное транспортное средство, предназначенное для перемещения указанного ряда транспортных средств, при этом указанная система содержит по меньшей мере один датчик, размещенный относительно пути и предназначенный для установления местонахождения головного транспортного средства на пути, причем указанный по меньшей мере один датчик размещен на заданном расстоянии от места останова головного транспортного средства и выполнен с возможностью передачи по меньшей мере одного сигнала при установлении местонахождения головного транспортного средства на пути; и контроллер, выполненный с возможностью приема сигналов от датчика и нахождения в состоянии обмена данными с автономной системой управления механизированного транспортного средства, причем контроллер также выполнен с возможностью передачи сигнала механизированному транспортному средству при установлении датчиком местонахождения головного транспортного средства; при этом система управления механизированного транспортного средства в ответ на указанный сигнал выполнена с возможностью установления максимальной скорости механизированного транспортного средства при его перемещении по пути к месту останова и блокировки любой установки скорости, которая превышает установку максимальной скорости. 2. Система по п.1, в которой механизированное транспортное средство выполнено с возможностью буксировки других транспортных средств и является головным транспортным средством. 3. Система по п.1, в которой механизированное транспортное средство выполнено с возможностью толкания других транспортных средств, при этом головное транспортное средство расположено в противоположном относительно механизированного транспортного средства конце ряда соединенных между собой транспортных средств. 4. Система по п.1, в которой система управления на механизированном транспортном средстве выполнена с возможностью подачи команды остановки головному транспортному средству так, чтобы головное транспортное средство останавливалось на некотором расстоянии от места останова после получения сигнала от контроллера, при этом локомотив не может превысить установленную максимальную скорость при перемещении к месту останова от того места, в котором остановился локомотив. 5. Система по п.1, дополнительно содержащая несколько датчиков, расположенных относительно пути и предназначенных для установления местонахождения транспортного средства в ряду соединенных между собой транспортных средств, которые перемещаются по пути с помощью дистанционно управляемого механизированного транспортного средства, причем датчики расположены на расстоянии друг от друга, а каждый датчик расположен на расстоянии от места останова головного транспортного средства, при этом при установлении местонахождения головного транспортного средства на пути каждый датчик выполнен с возможностью передачи сигнала контроллеру. 6. Система по п.5, в которой указанные несколько датчиков содержат, по меньшей мере, первый датчик и, по меньшей мере, второй датчик, причем первый датчик расположен на расстоянии от места останова, а второй датчик расположен между первым датчиком и местом останова, при этом система управления локомотива выполнена с возможностью введения первой установки максимальной скорости при установлении первым датчиком местонахождения на пути головного транспортного средства и снижения установленной максимальной скорости при установлении вторым датчиком местонахождения на пути головного транспортного средства. 7. Система по п.1, в которой контроллер является компонентом внешней системы дистанционного управления, имеющей интерфейс оператора, который содержит систему ввода, предназначенную для активации контроллера, обеспечивающего установку максимальной скорости, когда датчик устанавливает местонахождение головного транспортного средства на пути, при этом система управления локомотива выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость. 8. Система по п.7, в которой система управления механизированного транспортного средства выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость при перемещении механизированного транспортного средства в первом направлении и с возможностью срабатывать на команды превышать максимальную скорость при перемещении во втором направлении. 9. Система по п.1, в которой контроллер представляет собой отдельный компонент системы дистанционного управления, расположенный на обочине пути и выполненный с возможностью использования оператором для управления перемещением по пути механизированного транспортного средства, а система управления локомотива выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость. 10. Система по п.9, в которой система управления механизированного транспортного средства выполнена с возможностью не срабатывать на команды от системы дистанционного управления превышать максимальную скорость при перемещении механизированного транспортного средства в одном направлении и с возможностью срабатывать на команды превышать максимальную скорость при перемещении в обратном направлении. 11. Система по п.1, в которой система управления механизированного транспортного средства выполнена с возможностью осуществления доступа к данным, относящимся к идентификации пути, и к данным, относящимся к одной или нескольким установкам максимальной скорости, связанным с одним или несколькими расстояниями, на котором головное транспортное средство находится от места останова. 12. Система по п.11, в которой система управления выполнена с возможностью осуществления доступа к данным, относящимся к месту остановки головного транспортного средства на расстоянии от места останова, и по меньшей мере к одной установке максимальной скорости для перемещения механизированного транспортного средства к месту останова. 13. Система по п.1, в которой механизированное транспортное средство представляет собой локомотив, а другие транспортные средства представляют собой несколько сцепленных друг с другом и с локомотивом железнодорожных вагонов, кроме того, путь представляет собой железнодорожный путь. 14. Система по п.13, в которой локомотив выполнен с возможностью толкания железнодорожных вагонов, а головное транспортное средство представляет собой железнодорожный вагон, расположенный в противоположном относительно локомотива конце ряда соединенных между собой железнодорожных вагонов. 15. Способ управления перемещением поезда, содержащего по меньшей мере один локомотив, толкающий несколько железнодорожных вагонов, причем железнодорожные вагоны содержат головной железнодорожный вагон, соединенный с удаленным от локомотива железнодорожным вагоном, а локомотив имеет автономную систему управления, при этом способ включает установление местонахождения на железнодорожном пути головного железнодорожного вагона,толкаемого дистанционно управляемым локомотивом от места останова головного железнодорожного вагона на заданное расстояние; ввод установки максимальной скорости локомотива по сигналу, передаваемому от дистанционного контроллера, чтобы толкать железнодорожные вагоны по железнодорожному пути на указанное расстояние от места, где установлено местонахождение головного железнодорожного вагона на пути, к месту останова. 16. Способ по п.15, в котором дополнительно устанавливают местонахождение головного вагона в нескольких местах пути, причем каждое место находится на заданном расстоянии от места останова, и вводят установку максимальной скорости локомотива каждый раз, когда установлено местонахождение головного вагона на пути по сигналу, в ответ на сигнал, передаваемый от контроллера локомотива. 17. Способ по п.16, в котором при установлении местонахождения устанавливают местонахождение головного железнодорожного вагона в первом местонахождении, которое находится на первом заданном расстоянии от места останова; и устанавливают местонахождение головного железнодорожного вагона во втором местонахождении, которое находится на втором заданном расстоянии от места останова, причем второе заданное расстояние короче первого заданного расстояния; и вводят первую установку максимальной скорости локомотива при его перемещении от первого местонахождения ко второму местонахождению; и вводят вторую установку максимальной скорости после установления местонахождения головного железнодорожного вагона во втором местонахождении, причем максимальная скорость второй установки меньше, чем максимальная скорость первой установки. 18. Способ по п.15, в котором дополнительно останавливают локомотив на заданном расстоянии от места останова по сигналу, переданному от контроллера, когда установлено местонахождение головного железнодорожного вагона на путях. 19. Способ по п.15, в котором дополнительно обеспечивают наличие системы дистанционного управления для управления перемещением поезда по железнодорожному пути, причем система дистанционного управления содержит контроллер, выполненный с возможностью управления перемещением локомотива, когда локомотив толкает и буксирует железнодорожные вагоны, при этом если локомотив толкает вагоны по сигналам, полученным от системы дистанционного управления, то локомотив не может превышать установленную максимальную скорость. 20. Способ по п.19, в котором система дистанционного управления выполнена с возможностью управления превышением локомотивом максимальной скорости, когда локомотив буксирует железнодорожные вагоны от места останова.
МПК / Метки
МПК: B61L 3/12, B61L 17/00
Метки: соединенных, транспортных, перемещением, способ, собой, средств, дистанционного, ряда, система, управления, между
Код ссылки
<a href="https://eas.patents.su/9-20012-sistema-i-sposob-distancionnogo-upravleniya-peremeshheniem-ryada-soedinennyh-mezhdu-sobojj-transportnyh-sredstv.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ дистанционного управления перемещением ряда соединенных между собой транспортных средств</a>
Способ, система и программный продукт для управления обработкой транспортных средств
Номер патента: 12469
Опубликовано: 30.10.2009
Автор: Сикандер Илмари
МПК: G07C 5/00, G06Q 10/00
Метки: продукт, программный, обработкой, транспортных, управления, средств, способ, система
Формула / Реферат:
1. Способ обработки транспортного средства в порядке номеров очереди, включающий прием запроса на резервирование обработки; определение в ответ на указанный запрос идентификационной информации транспортного средства и ожидаемого времени обработки и отправку указанной определенной идентификационной информации транспортного средства и ожидаемого времени обработки отправителю указанного запроса; отличающий тем, что он также включает прием указанной...
Система и способ определения средней скорости транспортных средств в целях управления дорожным движением
Номер патента: 16732
Опубликовано: 30.07.2012
Автор: Грасси Никола
МПК: G06K 9/32, G06F 17/30, G08G 1/054...
Метки: дорожным, движением, управления, определения, способ, система, средств, целях, скорости, средней, транспортных
Формула / Реферат:
1. Способ идентификации движущихся объектов с использованием маркировки, содержащей, по меньшей мере, буквенно-цифровые символы первого набора символов и извлеченной из изображений, полученных камерами, размещенными по меньшей мере в двух различных пунктах на некотором расстоянии, причем указанные камеры синхронизированы, а указанные изображения получены камерами в течение заданного временного интервала, согласно которому извлекают...
Цепь, содержащая множество соединенных между собой звеньев
Номер патента: 19101
Опубликовано: 30.01.2014
Авторы: Винке Дитрих, Якобс Мартинус Йоханнес Николас, Диркс Кристиан Хенри Петер
МПК: B66C 1/12, F16G 13/12, A61B 17/06...
Метки: множество, звеньев, цепь, между, содержащая, собой, соединенных
Формула / Реферат:
1. Цепь для швартовки или постановки на якорь лодки, прикрепления груза при автомобильных, железнодорожных, водных и воздушных перевозках и для перемещения, подъема или подвешивания грузов, содержащая множество соединенных между собой звеньев, при этом по меньшей мере часть звеньев содержит многоволоконные нити, отличающаяся тем, что многоволоконные нити представляют собой многоволоконные нити из полиэтилена сверхвысокой молекулярной массы.2....
Устройство дистанционного управления и способ конфигурирования устройства дистанционного управления
Номер патента: 4552
Опубликовано: 24.06.2004
Автор: Нильсен Мартин Сандал
МПК: G07C 9/00
Метки: конфигурирования, дистанционного, управления, устройство, способ, устройства
Формула / Реферат:
1. Устройство дистанционного управления для приведения в действие по меньшей мере одного управляемого блока, такого как приводное устройство, связанное с подвижным элементом, таким как дверь, ворота, окно, шторы, ставни или занавески, тент или тому подобное, причем устройство дистанционного управления содержит блок дистанционного управления и по меньшей мере один дистанционно управляемый блок, выполненные таким образом, что блок дистанционного...
Система дистанционного управления для транспортного средства.
Номер патента: 298
Опубликовано: 29.04.1999
Автор: Кеннет Е.Флик
МПК: E05B 49/00, B60R 25/10
Метки: управления, дистанционного, система, средства, транспортного
Формула / Реферат:
1. Система дистанционного управления (10) для транспортного средства, содержащая, по меньшей мере, один уникально закодированный дистанционный передатчик (50), средство проверки дистанционного передатчика, приемник (13), расположенный внутри транспортного средства для приема сигнала, по меньшей мере, от одного уникально закодированного дистанционного передатчика; и средство обучения дистанционного передатчика (47), оперативно подключаемое к...
Предыдущий патент: Состав
Следующий патент: Двигательная установка
Случайный патент: Составы из фосфата или полифосфата алюминия