Узел подвижной платформы для судна, в частности для подъема или спуска тендерного судна или тому подобного

Формула / Реферат
1. Подвижный узел (1) платформы, содержащий основание (2), выполненное с возможностью прикрепления к опорной конструкции, и по меньшей мере один поворотный рычаг (32a, 32b), шарнирно соединенный одним концом с основанием (2) вокруг первой оси (x1) поворота и другим концом - с грузовой платформой (3) вокруг второй оси (х2) поворота, при этом упомянутый по меньшей мере один поворотный рычаг (32a, 32b) выполнен с возможностью поворота посредством исполнительных средств (50, 60, U1, U2, S1, S2, S3), выполненных с возможностью обеспечения постоянного наклона платформы (3) относительно основания (2) во время поворота упомянутого по меньшей мере одного поворотного рычага (32a, 32b), отличающийся тем, что исполнительные средства содержат первый и второй вращательные приводы (50, 60), установленные на первой и второй оси поворота соответственно, причем первый вращательный привод (50) содержит первую часть (51), прикрепленную к основанию (2), и вторую часть (52), выполненную с возможностью поворота относительно первой части (51) и прикрепленную к поворотному рычагу (32a, 32b), и второй вращательный привод (60) содержит первую часть (61), прикрепленную к грузовой платформе (3), и вторую часть (62), выполненную с возможностью поворота относительно первой части и прикрепленную к поворотному рычагу (32a, 32b), при этом исполнительные средства также содержат средства (U2, S1, S3) управления, выполненные с возможностью координированного регулирования поворота первого и второго вращательных приводов.
2. Узел платформы по п.1, в котором средства управления содержат датчик (S1) базового наклона, прикрепленный к основанию (2) и выполненный с возможностью обеспечения сигнала базового наклона, показывающего наклон основания (2), датчик (S3) выравнивания наклона, выполненный с возможностью обеспечения сигнала выравнивания наклона, показывающего наклон платформы (3), и блок (U1, U2) управления, запрограммированный для сравнения друг с другом величин базового сигнала и сигнала выравнивания и выполнения поворота первого и второго вращательных приводов в зависимости от сравнения.
3. Узел платформы по п.2, в котором средства управления также содержат датчик (S3) наклона при перемещении, прикрепленный к поворотному рычагу (32a, 32b) и выполненный с возможностью обеспечения блока (U2) управления сигналом наклона при перемещении, показывающим наклон поворотного рычага (32a, 32b), при этом блок управления запрограммирован на сравнение друг с другом величин опорного сигнала и сигнала перемещения для определения угла поворота поворотного рычага относительно основания (2).
4. Узел платформы по любому из пп.1-3, в котором упомянутый по меньшей мере один поворотный рычаг (32a, 32b) выполнен в виде пары параллельных поворотных рычагов, а первый и второй вращательные приводы выполнены в виде вращательных приводов двойного действия, соответствующие первые части которых выполнены в виде концевых валов, прикрепленных к основанию и к грузовой платформе соответственно.
5. Узел платформы по любому из предыдущих пунктов, в котором упомянутый по меньшей мере один поворотный рычаг (32a, 32b) снабжен множеством ступенек (35, 35а), установленных по длине последнего и выполненных с возможностью обеспечения удобного доступа людей на платформу (3).
6. Узел платформы по п.5, также содержащий выравнивающие средства (68), соединяющие первую часть (51) первого вращательного привода (50) с множеством передаточных элементов (65), которые прикреплены соответственно к ступенькам (35, 35а) и выполнены с возможностью поворота вокруг оси, параллельной первой оси (x1) поворота, с обеспечением возможности постоянного поддержания множеством ступенек (35, 35а), по существу, одинакового наклона с платформой (3) во время поворота упомянутого по меньшей мере одного поворотного рычага (32a, 32b).
7. Узел платформы по п.6, в котором передаточные элементы (65) выполнены соответственно в виде шкивов, причем каждый прикреплен к соответствующей ступеньке (35), при этом выравнивающие средства выполнены в виде цепи, соединяющей шкивы (65) ступенек (35, 35а) с первой частью (51) первого вращательного привода (50) с обеспечением возможности вращения шкивов в том же направлении относительно поворотного рычага (32a, 32b).
8. Узел платформы по п.5, также содержащий выравнивающие средства, образованные системой рычагов, соединяющих вместе множество ступенек (35, 35а) с обеспечением возможности, по существу, постоянного поддержания множеством ступенек (35, 35а) одинакового наклона с платформой (3) во время поворота упомянутого по меньшей мере одного поворотного рычага (32a, 32b).
9. Узел платформы по любому из предыдущих пунктов, в котором опорной конструкцией является судно (В).

Текст
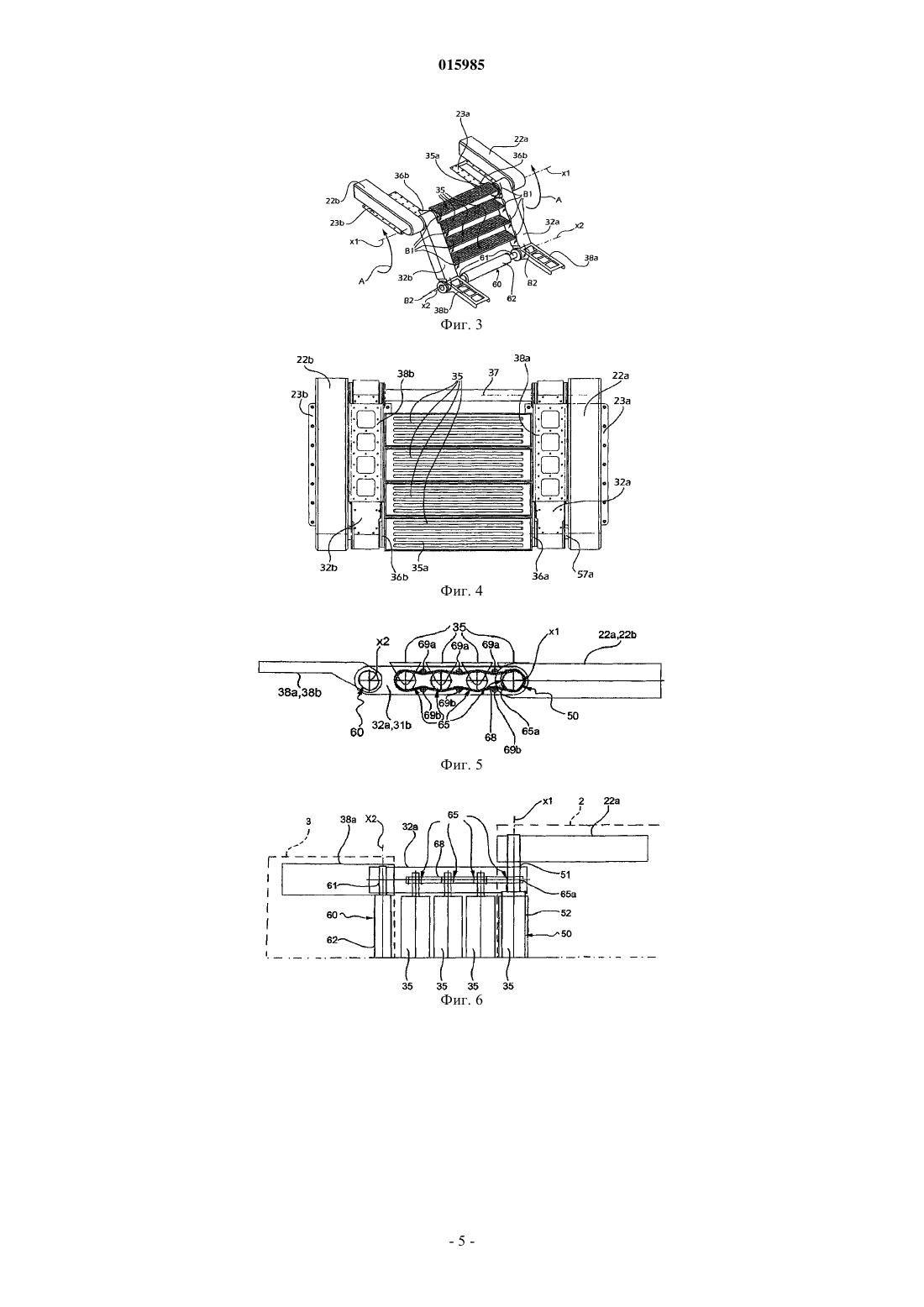
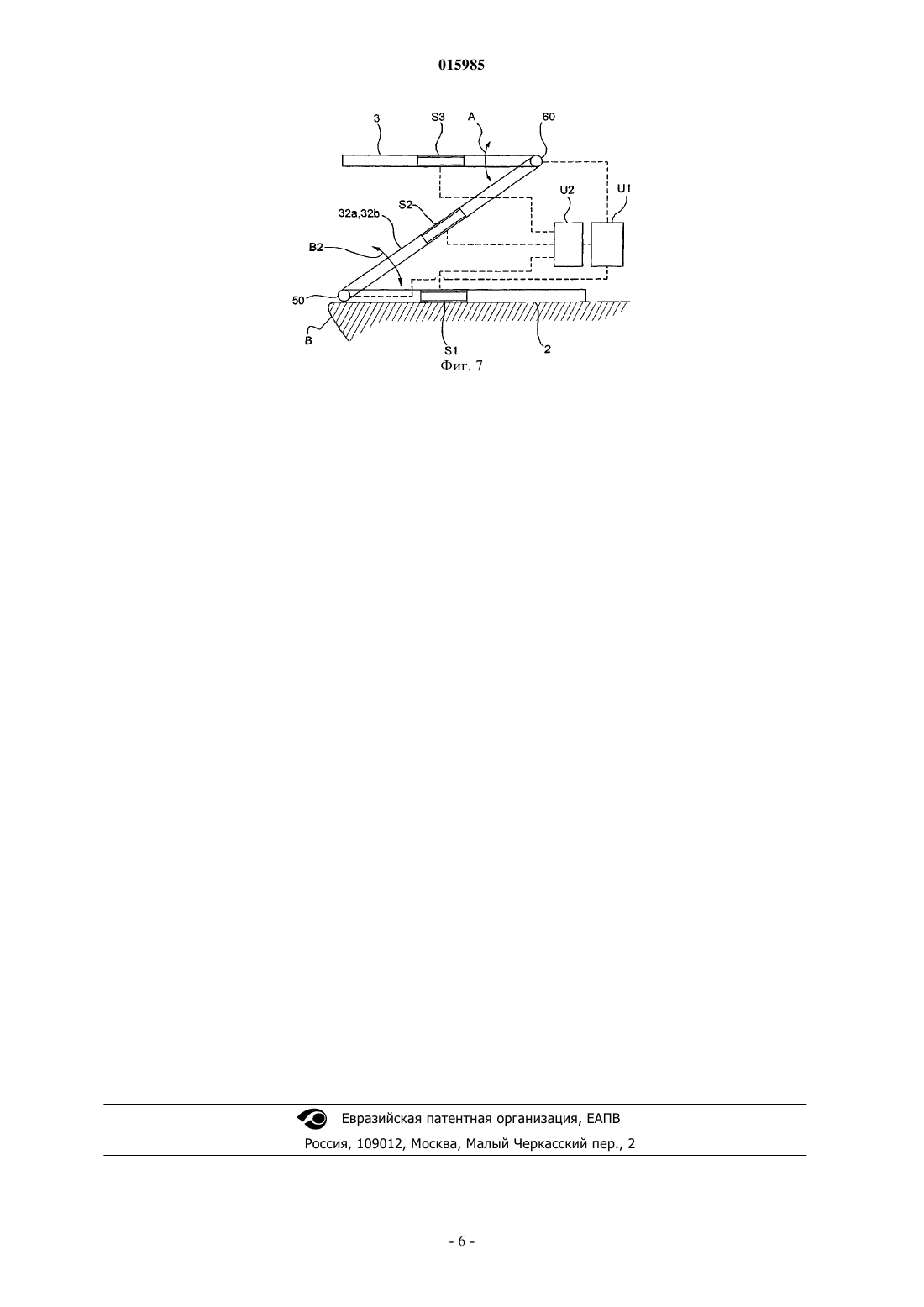
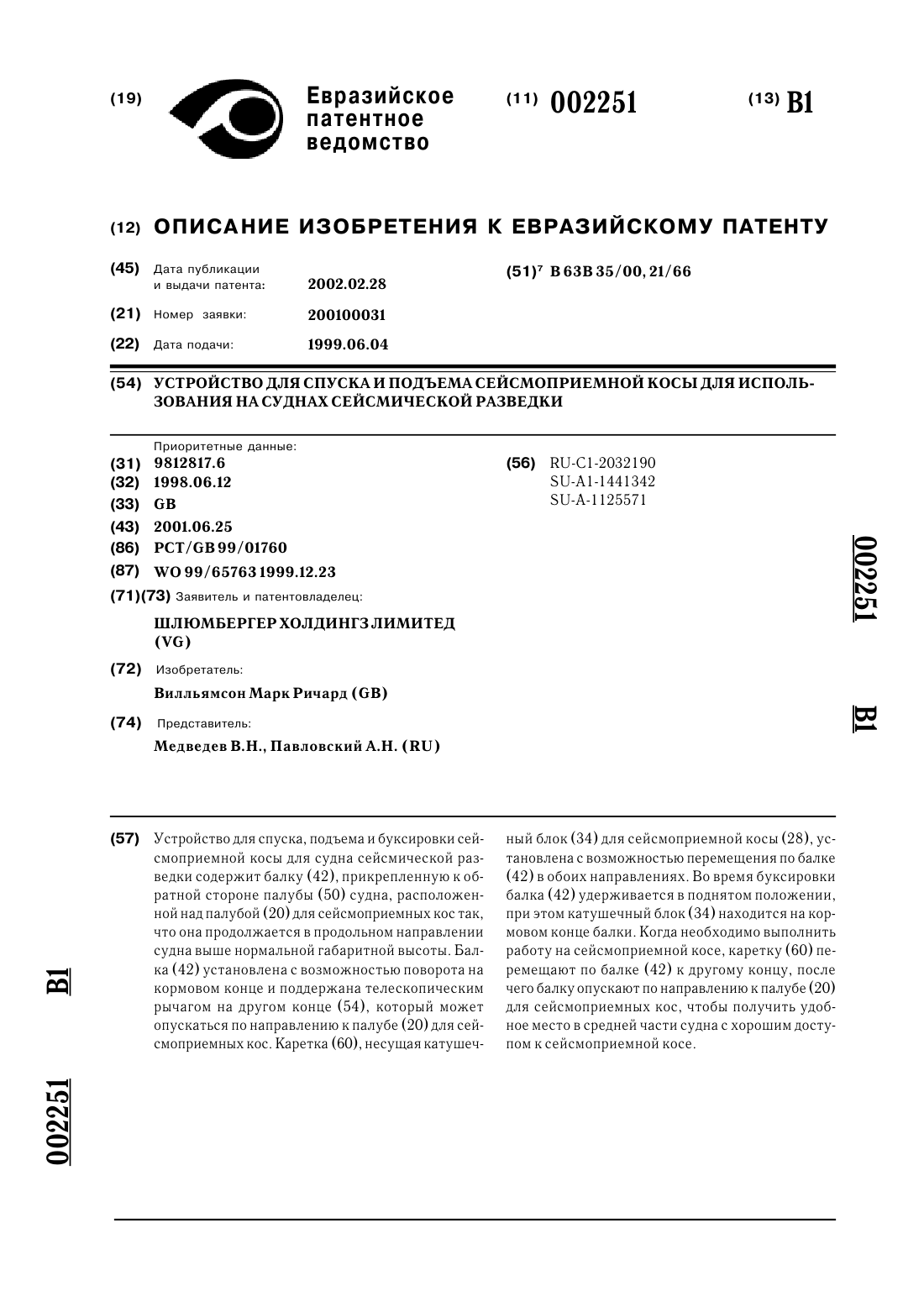
ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ЕВРАЗИЙСКОМУ ПАТЕНТУ Дата публикации и выдачи патента УЗЕЛ ПОДВИЖНОЙ ПЛАТФОРМЫ ДЛЯ СУДНА, В ЧАСТНОСТИ ДЛЯ ПОДЪЕМА ИЛИ СПУСКА ТЕНДЕРНОГО СУДНА ИЛИ ТОМУ ПОДОБНОГО Изобретение относится к узлу подвижной платформы (1), содержащему основание (2), которое может быть прикреплено к опорной конструкции, и по меньшей мере один поворотный рычаг (32a,32b), шарнирно соединенный одним концом с основанием (2) вокруг первой оси (x1) поворота и другим концом - с грузовой платформой (3) вокруг второй оси (х 2) поворота, при этом поворотный рычаг (32a, 32b) может быть повернут посредством исполнительных средств (50, 60 U1, U2, S1,S2, S3), которые выполнены с возможностью обеспечения постоянного наклона платформы (3) относительно основания (2) во время поворота поворотного рычага (32a, 32b). Исполнительные средства содержат первый и второй вращательные приводы, установленные на первой и второй оси поворота соответственно. Первый вращательный привод (50) содержит первую часть (51),прикрепленную к основанию (2), и вторую часть (52), выполненную с возможностью поворота относительно первой части (51) и прикрепленную к поворотному рычагу (32a, 32b), и второй вращательный привод (60), содержащий первую часть (61), прикрепленную к грузовой платформе(3), и вторую часть (62), выполненную с возможностью поворота относительно первой части(61) и прикрепленную к поворотному рычагу (32a, 32b), при этом исполнительные средства также содержат устройства (U1, U2, S1, S2, S3) управления, выполненные с возможностью координированного регулирования поворота первого и второго вращательных приводов. 015985 Настоящее изобретение относится к узлу подвижной платформы такого типа, который содержит основание, выполненное с возможностью прикрепления к опорной конструкции, и по меньшей мере один поворотный рычаг, шарнирно соединенный одним концом с упомянутым основанием вокруг оси поворота и другим концом с грузовой платформой вокруг второй оси поворота, при этом упомянутый по меньшей мере один поворотный рычаг выполнен с возможностью поворота при помощи исполнительных средств, выполненных с возможностью обеспечения постоянного наклона платформы относительно основания во время поворота упомянутого по меньшей мере одного поворотного рычага. Узел платформы такого типа, который применяется конкретно для судов, известен из международной заявки WO 03/106254 А 1, зарегистрированной на имя данного заявителя. В этом узле платформы перемещение поворотного(ых) рычага(ов) достигается при помощи цепных передаточных средств, при этом в данном случае также предусмотрены дополнительные цепные передаточные средства, которые обеспечивают параллельное выравнивание грузовой платформы и основания. Хотя это решение оказалось особенно эффективным, заявитель исследовал новые решения для перемещения грузовой платформы, которые являются оптимальными с точки зрения компактности всей системы привода. Следовательно, настоящее изобретение относится к узлу подвижной платформы такого типа, который определен во введении, в котором исполнительные средства содержат первый и второй вращательные приводы, установленные на первой и второй осях поворота соответственно, в котором первый вращательный привод содержит первую часть, прикрепленную к основанию, и вторую часть, выполненную с возможностью поворота относительно первой части и прикрепленную к поворотному рычагу, и в котором второй вращательный привод содержит первую часть, прикрепленную к грузовой платформе, и вторую часть, выполненную с возможностью поворота относительно первой части и прикрепленную к поворотному рычагу, при этом исполнительные средства также содержат средства управления, выполненные с возможностью координированного регулирования первого и второго вращательных приводов. Предпочтительные варианты осуществления описаны в зависимых пунктах формулы изобретения. Дополнительные цели и преимущества настоящего изобретения станут более понятными из следующего подробного описания предпочтительного, но неограничивающего, варианта осуществления,снабженного ссылками на сопроводительные чертежи, на которых: фиг. 1 представляет собой вид в перспективе узла платформы согласно настоящему изобретению,изображенного в первом рабочем положении; фиг. 2 представляет собой вид в перспективе узла платформы согласно фиг. 1 во втором рабочем положении; фиг. 3 представляет собой вид в перспективе конструкции узла платформы согласно фиг. 1 во втором рабочем положении; фиг. 4 представляет собой вид сверху конструкции, изображенной на фиг. 3, в первом рабочем положении; фиг. 5 и 6 представляют собой схематичный вид и схематичный вид в плане соответственно узла платформы согласно настоящему изобретению; фиг. 7 представляет собой схематичный вид узла платформы для иллюстрации его работы согласно настоящему изобретению. На фиг. 1 изображен узел 1 платформы согласно настоящему изобретению, предназначенный для установки на опорной конструкции, например, в числе прочего, на кормовом участке судна. Узел 1 платформы содержит основание 2, с которым шарнирно соединяется подвижная платформа 3, показанная на фиг. 1 в закрытом положении. Основание 2 может быть снабжено средством (не показано) для обеспечения прикрепления узла 1 к опорной конструкции или, в альтернативном варианте осуществления, может быть встроено в саму опорную конструкцию. Со ссылкой на фиг. 2, узел 1 платформы изображен в полностью открытом положении. Основание 2 узла имеет углубление 21 для приема подвижной платформы 3. Углубление 21 выполнено так, что платформа 3 в закрытом положении полностью вставляется внутрь всей конфигурации основания 2, как показано на фиг. 1, приводя к тому, что верхняя поверхность грузовой платформы 3 находится на одном уровне с верхней поверхностью основания 2. В углублении 21 также располагается пара неподвижных рычагов 22 а, 22b. Как может быть более понятно из фиг. 3, неподвижные рычаги 22 а, 22b снабжены соответствующими фиксирующими пластинами 23 а, 23b, которые позволяют их установку на основании 2 посредством обычных соединительных средств, таких, например, как болты. Соответствующие поворотные рычаги 32a, 32b шарнирно закреплены на дистальных концах неподвижных рычагов 22 а, 22b и могут выполнять поворот в плоскости, которая является вертикальной (указана стрелкой А на чертеже), т.е. перпендикулярной основной плоскости основания 2 узла 1 платформы. Ось для шарнирного крепления поворотных рычагов 32a, 32b относительно неподвижных рычагов 22 а, 22b указана на чертежах как x1. Поворотные рычаги 32a, 32b образуют с множеством поверхностей 35, присоединенных к ним, лестницу, которая может быть ориентирована в вертикальной плоскости. Каждая поверхность или ступенька 35 может выполнять соответствующий поворот относительно поворотных рычагов 32a, 32b вокруг их про-1 015985 дольной оси (указана стрелками В 1 на чертежах). Ступенька 35 а, наиболее близко расположенная к основанию 2 узла 1 платформы, прикреплена к этому основанию посредством пары держателей 36 а, 36b,которые прикреплены с одной стороны к концам ступеньки 35 а и с другой стороны - к самому основанию 2. Пара поддерживающих опор 38 а, 38b шарнирно соединена с дистальными концами поворотных рычагов 32a, 32b. Их ось поворота указана на чертежах как х 2. Поддерживающие опоры 38 а, 38b могут выполнять соответствующий поворот (т.е. тот, который указан стрелками В 2) относительно поворотных рычагов 32a, 32b в вертикальной плоскости до тех пор, пока они не принимают конфигурацию, сложенную обратно вдоль этих рычагов 32a, 32b в закрытом положении, показанном на фиг. 4. Поддерживающие опоры 38 а, 38b позволяют установку подвижной платформы 3, как показано на фиг. 2. Диаграмма, показанная на фиг. 5 и 6, более понятно иллюстрирует работу узла платформы согласно настоящему изобретению. Диаграмма изображает узел 1 платформы. Первый вращательный привод 50 установлен коаксиально с осью x1 шарнирного соединения между неподвижными рычагами 22 а и 22b и поворотными рычагами 32a, 32b, при этом второй вращательный привод 60 установлен аксиально с осью х 2 шарнирного соединения между поворотными рычагами 32a, 32b и поддерживающими опорами 38 а,38b. В показанном примере вращательные приводы 50, 60 выполнены как приводы двойного действия(только половина которых может быть видна на фиг. 6), поскольку они предусмотрены для перемещения двух поворотных рычагов 32a, 32b и двух поддерживающих опор 38 а, 38b. Эти приводы, например, являются гидравлическими приводами компактного типа, в частности такого типа, который содержит поршень, аксиальное перемещение которого преобразуется во вращательное движение вала. Первый вращательный привод 50 двойного действия содержит первую часть 51, прикрепленную к неподвижным рычагам 22 а, 22b и, следовательно, к основанию 2, и вторую часть 52, которая установлена с возможностью вращения относительно первой части и прикреплена к поворотным рычагам 32a, 32b. Первая часть 51 первого вращательного привода 50 может состоять из двух концевых валов вращательного привода двойного действия, который фиксирован относительно двух неподвижных рычагов 22 а,22b. Второй вращательный привод 60 содержит первую часть 61, прикрепленную к поддерживающим опорам 38 а, 38b и, следовательно, к грузовой платформе 3, и вторую часть 62, которая выполнена с возможностью вращения относительно первой части и прикреплена к поворотным рычагам 32a, 32b. Первая часть 61 второго вращательного привода 60 может состоять из двух концевых валов вращательного привода двойного действия, который прикреплен к двум поддерживающим опорам 38 а, 38b платформы 3 соответственно. Перемещение двух приводов 50 и 60 двойного действия осуществляется посредством гидравлического блока управления, обозначенного как U1 на фиг. 7, который подает жидкость, например масло, для этих приводов. Со ссылкой на фиг. 7, система привода также содержит электронный блок U2 управления, который использует сигналы, обеспеченные датчиками S1, S2, S3, для выполнения координированного поворота первого и второго вращательных приводов 50, 60. В частности, эти датчики являются датчиками абсолютного наклона и содержат базовый датчик S1, прикрепленный к основанию 2 узла платформы и, следовательно, к опорной конструкции В, датчик S3 перемещения, прикрепленный к поворотному(ым) рычагу(ам) 32 а и 32b, и датчик S3 выравнивания, прикрепленный к платформе 3. Базовый датчик S1 выполнен с возможностью обеспечения блока U2 управления сигналом базового наклона, означающего наклон основания 2 узла платформы. Датчик S2 перемещения выполнен с возможностью обеспечения блока U2 управления сигналом угла наклона при перемещении, означающим наклон поворотного(ых) рычага(ов) 32a, 32b. Базовый датчик S3 выполнен с возможностью обеспечивать узел U2 управления сигналом выравнивания наклона, означающим наклон платформы 3 узла платформы. Блок U2 управления программируется на сравнение друг с другом величин базового сигнала и сигнала выравнивания. Если во время перемещения узла блок управления обнаруживает, что эти величины отличаются друг от друга более определенного допуска, оно вмешивается, заставляя гидравлический блок U1 управления изменять распределение жидкости управления, подаваемой к двум приводам 50, 60 двойного действия. Таким образом, во время всего перемещения поворотных рычагов 32a, 32b обеспечено, что грузовая платформа 3 поддерживает постоянную ориентацию относительно основания 2. Предпочтительно блок U1 управления также программируется на сравнение друг с другом величин базового сигнала и сигнала перемещения с возможностью определения угла поворота поворотных рычагов относительно основания 2. Эта характеристика может иметь несколько регулирующих и/или предохранительных функций. Например, посредством оснащения блока управления интерфейсом для позволения пользователю устанавливать необходимый угол поворота относительно закрытого положения, можно запрограммировать блок управления так, чтобы он прекращал подачу жидкости на приводы, когда достигнут этот необходимый угол. Также блок управления можно запрограммировать для активации предупредительного сигнала или, в случае подвижной опорной конструкции такой, как судно, для предотвращения приведения в действие подвижной конструкции, если она обнаруживает, что угол перемещения изменяется, пока кто-либо пытается привести в действие подвижную конструкцию.-2 015985 Для узла платформы согласно настоящему изобретению можно получить поворот поворотных рычагов 32a, 32b с максимальным углом около 240 и более от закрытого положения, в котором эти рычаги 32a, 32b полностью продолжаются на основании 2 узла 1 платформы, в максимально открытое положение, допустимое посредством особого размещения оси поворота x1 поворотных рычагов 32a, 32b. Внутри поворотных рычагов 32a, 32b, которые выполнены в виде коробки, предусмотрен выравнивающий блок, который выполнен с возможностью поддерживать ориентацию ступенек 35 неизменной относительно основания 2 во время поворота поворотных рычагов. Для этого каждая ступенька 35 (как показано на фиг. 5) прикрепляется к соответствующей паре концевых шкивов 65. Шкивы 65 и соответствующие ступеньки 35 установлены с возможностью поворота на поворотных рычагах 32a, 32b для того,чтобы содержать ось вращения, которая является параллельной оси х. Ступенька 35 а, наиболее близко расположенная к основанию 2, прикрепляется к соответствующим шкивам 65 а, которые закреплены на первой части 51 первого вращательного привода 50 двойного действия, прикрепленного к неподвижным рычагам 22 а, 22b. Таким образом, ступенька 35 а остается неподвижной, когда поворачиваются поворотные рычаги 32a, 32b. Выравнивающая цепь 68 обмотана вокруг шкивов 65 и 65 а для того, чтобы обеспечивать вращение всех шкивов в том же направлении. Также предусмотрены верхние и нижние натяжные устройства 69 а, 69b, при этом эти устройства допускают увеличение угла намотки цепи 68 на шкивы 65, 65 а и поддержание постоянным их натяжения. Однако система для достижения выравнивания ступенек 35 не должна рассматриваться как ограниченная примером, описанным выше, при этом для этой цели можно предусмотреть другие средства, которые могут иметь место для специалиста в данной области техники, например рычажные системы. В случае если настоящее изобретение применяется для судна путем опускания платформы 3 с тем чтобы достичь полностью открытого положения поворотных рычагов 32a, 32b, эту платформу 3 можно погружать ниже поверхности воды, позволяя подъем и спуск тендерного судна или подобного типа морского транспортного средства, которым снабжено судно, при этом ступеньки 35 обеспечивают доступ для людей, плавающих в воде. Для того чтобы достичь палуб различной высоты, также можно изменить положение платформы 3, при этом то, что эта платформа 3 и ступеньки 35 остаются в любом случае горизонтальными, позволяет удобный доступ с судна и на судно. В дополнение, то, что платформа 3 остается горизонтальной также во время ее полного перемещения, позволяет удобный доступ также людям,которые имеют проблемы при хождении, а также погрузке насыпных предметов. В любом случае настоящее изобретение не ограничивается таким видом применения, но, как может быть вполне понятно, оно может быть использовано в любой области техники, когда требуется транспортирование грузов между различными уровнями по высоте при сохранении постоянного положения транспортируемого груза. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Подвижный узел (1) платформы, содержащий основание (2), выполненное с возможностью прикрепления к опорной конструкции, и по меньшей мере один поворотный рычаг (32a, 32b), шарнирно соединенный одним концом с основанием (2) вокруг первой оси (x1) поворота и другим концом - с грузовой платформой (3) вокруг второй оси (х 2) поворота, при этом упомянутый по меньшей мере один поворотный рычаг (32a, 32b) выполнен с возможностью поворота посредством исполнительных средств (50,60, U1, U2, S1, S2, S3), выполненных с возможностью обеспечения постоянного наклона платформы (3) относительно основания (2) во время поворота упомянутого по меньшей мере одного поворотного рычага (32a, 32b), отличающийся тем, что исполнительные средства содержат первый и второй вращательные приводы (50, 60), установленные на первой и второй оси поворота соответственно, причем первый вращательный привод (50) содержит первую часть (51), прикрепленную к основанию (2), и вторую часть(52), выполненную с возможностью поворота относительно первой части (51) и прикрепленную к поворотному рычагу (32a, 32b), и второй вращательный привод (60) содержит первую часть (61), прикрепленную к грузовой платформе (3), и вторую часть (62), выполненную с возможностью поворота относительно первой части и прикрепленную к поворотному рычагу (32a, 32b), при этом исполнительные средства также содержат средства (U2, S1, S3) управления, выполненные с возможностью координированного регулирования поворота первого и второго вращательных приводов. 2. Узел платформы по п.1, в котором средства управления содержат датчик (S1) базового наклона,прикрепленный к основанию (2) и выполненный с возможностью обеспечения сигнала базового наклона,показывающего наклон основания (2), датчик (S3) выравнивания наклона, выполненный с возможностью обеспечения сигнала выравнивания наклона, показывающего наклон платформы (3), и блок (U1, U2) управления, запрограммированный для сравнения друг с другом величин базового сигнала и сигнала выравнивания и выполнения поворота первого и второго вращательных приводов в зависимости от сравнения. 3. Узел платформы по п.2, в котором средства управления также содержат датчик (S3) наклона при перемещении, прикрепленный к поворотному рычагу (32a, 32b) и выполненный с возможностью обеспе-3 015985 чения блока (U2) управления сигналом наклона при перемещении, показывающим наклон поворотного рычага (32a, 32b), при этом блок управления запрограммирован на сравнение друг с другом величин опорного сигнала и сигнала перемещения для определения угла поворота поворотного рычага относительно основания (2). 4. Узел платформы по любому из пп.1-3, в котором упомянутый по меньшей мере один поворотный рычаг (32a, 32b) выполнен в виде пары параллельных поворотных рычагов, а первый и второй вращательные приводы выполнены в виде вращательных приводов двойного действия, соответствующие первые части которых выполнены в виде концевых валов, прикрепленных к основанию и к грузовой платформе соответственно. 5. Узел платформы по любому из предыдущих пунктов, в котором упомянутый по меньшей мере один поворотный рычаг (32a, 32b) снабжен множеством ступенек (35, 35 а), установленных по длине последнего и выполненных с возможностью обеспечения удобного доступа людей на платформу (3). 6. Узел платформы по п.5, также содержащий выравнивающие средства (68), соединяющие первую часть (51) первого вращательного привода (50) с множеством передаточных элементов (65), которые прикреплены соответственно к ступенькам (35, 35 а) и выполнены с возможностью поворота вокруг оси,параллельной первой оси (x1) поворота, с обеспечением возможности постоянного поддержания множеством ступенек (35, 35 а), по существу, одинакового наклона с платформой (3) во время поворота упомянутого по меньшей мере одного поворотного рычага (32a, 32b). 7. Узел платформы по п.6, в котором передаточные элементы (65) выполнены соответственно в виде шкивов, причем каждый прикреплен к соответствующей ступеньке (35), при этом выравнивающие средства выполнены в виде цепи, соединяющей шкивы (65) ступенек (35, 35 а) с первой частью (51) первого вращательного привода (50) с обеспечением возможности вращения шкивов в том же направлении относительно поворотного рычага (32a, 32b). 8. Узел платформы по п.5, также содержащий выравнивающие средства, образованные системой рычагов, соединяющих вместе множество ступенек (35, 35 а) с обеспечением возможности, по существу,постоянного поддержания множеством ступенек (35, 35 а) одинакового наклона с платформой (3) во время поворота упомянутого по меньшей мере одного поворотного рычага (32a, 32b). 9. Узел платформы по любому из предыдущих пунктов, в котором опорной конструкцией является судно (В).
МПК / Метки
МПК: B63B 27/14, B63B 23/32
Метки: подвижной, судна, спуска, подобного, тендерного, узел, частности, подъема, платформы, тому
Код ссылки
<a href="https://eas.patents.su/7-15985-uzel-podvizhnojj-platformy-dlya-sudna-v-chastnosti-dlya-podema-ili-spuska-tendernogo-sudna-ili-tomu-podobnogo.html" rel="bookmark" title="База патентов Евразийского Союза">Узел подвижной платформы для судна, в частности для подъема или спуска тендерного судна или тому подобного</a>
Устройство для спуска и подъема сейсмоприемной косы для использования на суднах сейсмической разведки
Номер патента: 2251
Опубликовано: 28.02.2002
Автор: Вилльямсон Марк Ричард
МПК: B63B 35/00
Метки: спуска, сейсмоприемной, сейсмической, подъема, суднах, устройство, разведки, использования, косы
Формула / Реферат:
1. Устройство для спуска и подъема сейсмоприемной косы для использования на судне сейсмической разведки, содержащее, балку, средство для закрепления балки в продольном направлении судна выше нормальной габаритной высоты над палубой для сейсмоприемных кос судна, содержащее шарнирное соединение с самым кормовым концом балки, обеспечивающее возможность поворота конца вокруг горизонтальной осевой линии, проходящей поперек балки, и удлиняемое опорное...
Фурнитура для окна, двери или тому подобного
Номер патента: 14799
Опубликовано: 28.02.2011
Автор: Штапф Петер
МПК: E05D 7/12, E05D 15/52, E05D 7/04...
Метки: фурнитура, подобного, двери, тому, окна
Формула / Реферат:
1. Фурнитура (1) для двери, окна или тому подобного, содержащая угловой переключатель (2), соединенную с угловым переключателем (2), образующую верхнюю планку (11) приводную тягу (9) и поворотный ножничный рычаг (12), которым снабжено устройство (17) опорного кронштейна, причем устройство (17) опорного кронштейна содержит базовую часть (18) и опорный кронштейн (19), установленный с помощью разъемного поворотно-блокирующего устройства (20) на...
Устройство передачи усилия для окна, двери или тому подобного
Номер патента: 14798
Опубликовано: 28.02.2011
Авторы: Бейер Хольгер, Берче Арнольд
МПК: E05C 9/20, E05D 15/52
Метки: передачи, тому, двери, окна, усилия, устройство, подобного
Формула / Реферат:
1. Регулируемое по длине устройство передачи усилия для окна, двери и т.п., содержащее первый элемент и второй элемент, причем оба элемента содержат соединительные средства и выполнены с возможностью соединения друг с другом в выбираемых продольных положениях, отличающееся тем, что соединительные средства (12, 22) выполнены с возможностью соединения друг с другом с помощью соединительного элемента (16), причем первый элемент (19) содержит в...
Стенной элемент для облицовки фасадов и тому подобного
Номер патента: 6003
Опубликовано: 25.08.2005
Автор: Псцолла Хайнц
МПК: E04F 13/072, E04F 13/07, E04F 13/08...
Метки: элемент, подобного, облицовки, фасадов, стенной, тому
Формула / Реферат:
1. Стенной элемент для облицовки фасадов или тому подобного, содержащий плиты или камни, керамику, полоски кирпича или тому подобное, заложенные и/или заделанные в слой из твердого пенопласта или наклеенные на него, причем стыки между плитами могут быть закрыты с помощью строительного раствора, отличающийся тем, что на задней стороне стенного элемента (1) выполнены канавки (10, 11, 12). 2. Стенной элемент по п.1, отличающийся тем, что канавки...
Переворачиваемый инструмент для сельскохозяйственных чизель-культиваторов и тому подобного
Номер патента: 13674
Опубликовано: 30.06.2010
Автор: Маскио Эджидио
МПК: A01B 35/22
Метки: переворачиваемый, сельскохозяйственных, инструмент, чизель-культиваторов, подобного, тому
Формула / Реферат:
1. Переворачиваемый инструмент (6) для сельскохозяйственных чизель-культиваторов и тому подобного, включающий в себя удлиненное пластинчатое тело (7), на противоположных концах которого образованы соответствующие чизели (8а, 8b), и крепежные средства для инструмента (6) для крепления упомянутого тела (7) к свободному концу (3а) якорного элемента (3) чизель-культиватора (1) с возможностью переворачивания для установки одного или другого из...
Предыдущий патент: Способ и система для обработки газа, образующегося в результате испарения
Следующий патент: Способ коррекции цифровых изображений
Случайный патент: Окно с оконной рамой