Бистатическая радиолокационная станция
Номер патента: 7143
Опубликовано: 25.08.2006
Авторы: Самарин Анатолий Валентинович, Бляхман Александр Борисович
Формула / Реферат
Бистатическая радиолокационная станция с обнаружением "на просвет", содержащая передающую позицию в составе последовательно соединенных передатчика и антенны, направленной на удаленную от передающей приемную позицию, состоящую из последовательно соединенных приемной антенны с многолучевой диаграммой направленности, обращенной в сторону передающей позиции, и одного приемного канала, состоящего из приемника и блока измерения частоты Доплера, а также соединенных последовательно блока измерения пеленга и блока формирования траектории и распознавания классов воздушных объектов, отличающаяся тем, что на приемной позиции введены N приемных каналов по числу лучей диаграммы направленности приемной антенны, в каждый из которых введено устройство режекции прямого сигнала передатчика и пассивных помех, вход которого соединен с выходом приемника, а выход - с входом блока измерения частоты Доплера, причем входы всех N приемников соединены с N выходами приемной антенны, а выходы всех N блоков измерения частоты Доплера соединены с N входами блока измерения пеленга, также введено выносное рабочее место оператора в составе устройства сопряжения с приемной позицией, соединенного по входу с выходом блока формирования траектории и распознавания классов воздушных объектов, устройства отображения радиолокационной информации и аппаратуры передачи данных, входы которых соединены с выходом устройства сопряжения с приемной позицией.

Текст
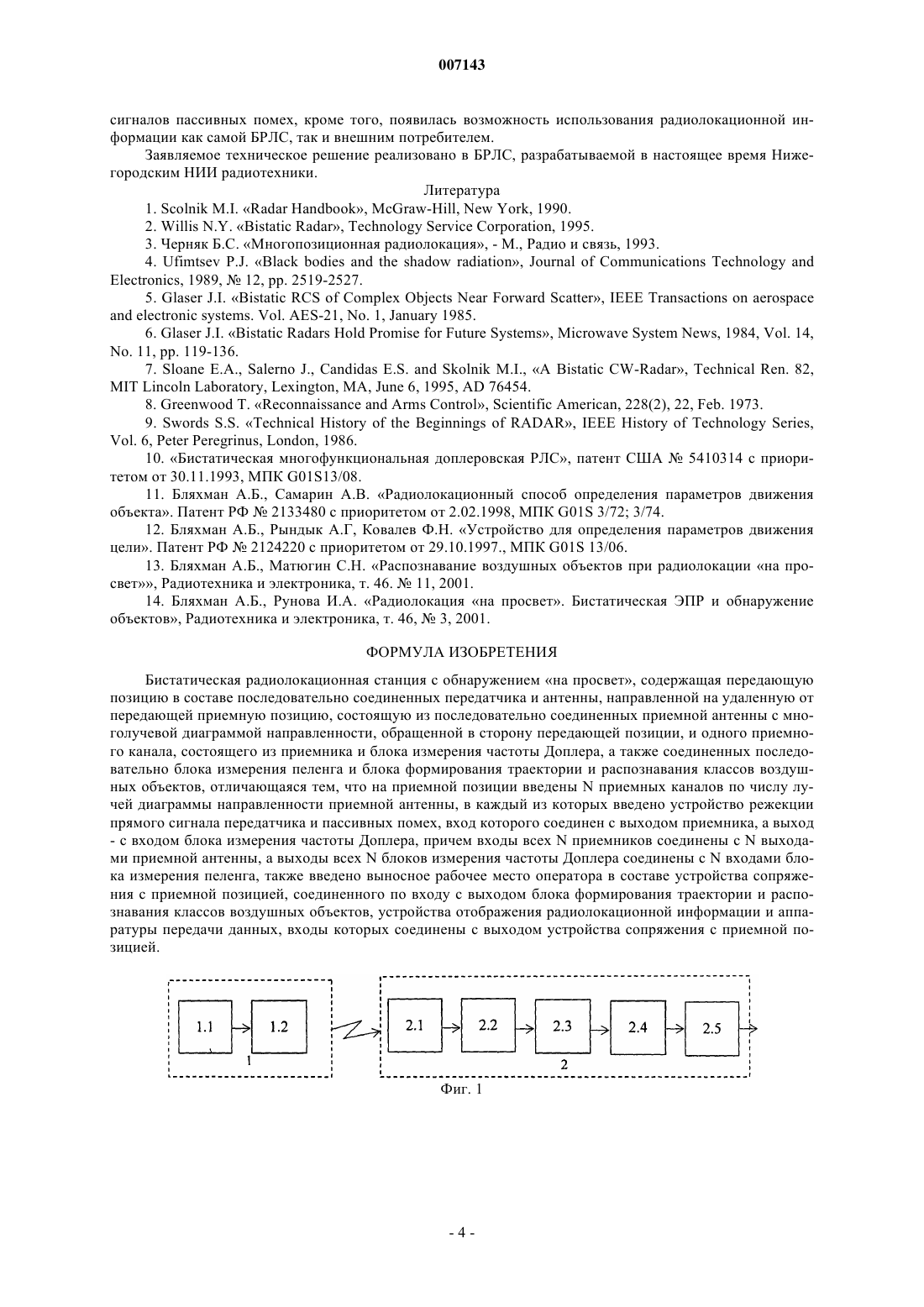
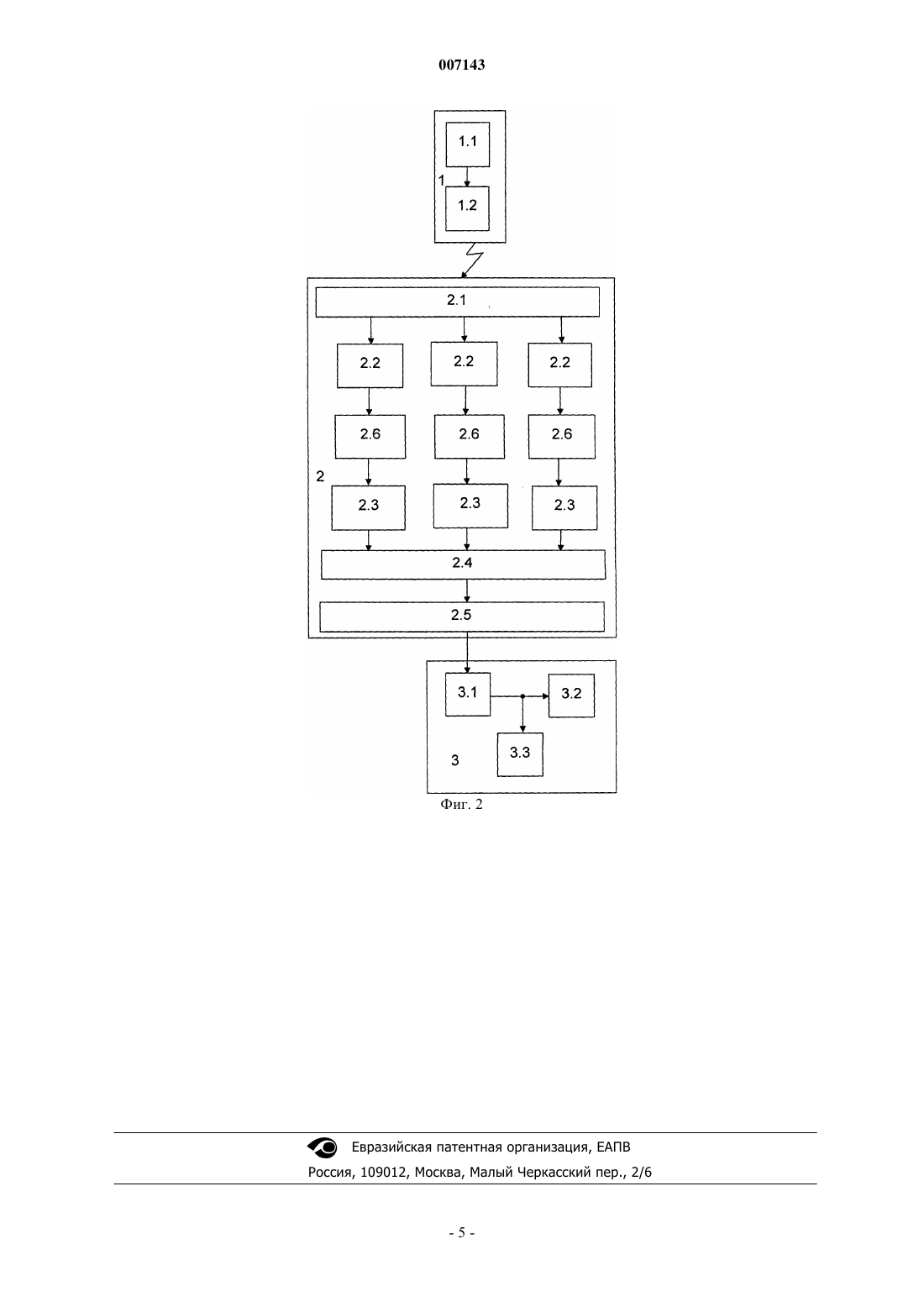
007143 Изобретение относится к радиолокации, в частности к бистатической радиолокации с обнаружением на просвет, и может быть использовано для обнаружения, измерения координат и распознавания низколетящих целей, в том числе малоразмерных. Просветный эффект, или явление резкого возрастания эффективной поверхности рассеяния(ЭПР) воздушных объектов при рассеянии вперед, наблюдается, как известно из [1-3], для больших (по отношению к рабочей длине волны излучения ) непрозрачных объектов, расположенных в зоне существования просветного эффекта, сосредоточенной вблизи линии передатчик-приемник (линии связи). Пояснение физической природы этого эффекта представлены в [1-3], в дополнение к ним можно указать теоретическую работу [4], поясняющую независимость просветной ЭПР от наличия на объекте радиопоглощающего покрытия, и работы [5, 6], где описывается методика расчета бистатических ЭПР воздушных объектов. Основными преимуществами бистатических радиолокационных станций (БРЛС) являются: высокий энергетический потенциал; низкий уровень флуктуации эхо-сигнала; низкий уровень пассивных помех; увеличение объема сигнальной информации о воздушных объектах; малое энергопотребление (экономичность),а основными недостатками: необходимость синхронизации разнесенных позиций и передачи опорных колебаний и сигналов; ограничение динамического диапазона приемной аппаратуры из-за влияния на нее прямого сигнала передатчика, который значительно мощнее эхо-сигнала. Известны различные варианты построения БРЛС [7-10], в которых осуществлена попытка одновременной реализации их преимуществ и минимизации влияния недостатков. Развитие радиолокации в целом и бистатической радиолокации в частности показало, что перспективу имеют системы, осуществляющие измерение координат объектов. В [1-3] показано, что в БРЛС могут измеряться угловые координаты цели относительно приемной позиции, суммарные дальности передатчик-цель-приемник, скорость изменения суммарной дальности и доплеровское смещение частоты эхо-сигнала на приемной позиции. Эти первичные, или измеряемые,координаты, если их количество достаточно, путем определенных вычислительных процедур преобразуются в пространственные координаты цели. Вся проблема как раз и заключается в выборе метода получения первичных координат, позволяющего реализовать преимущества БРЛС, избежав или преодолев их недостатки. Наиболее близкой заявляемой БРЛС является БРЛС, описанная в статье, опубликованной в журнале Радиотехника и электроника, т. 46,3 за 2001 г., Радиолокация на просвет. Бистатическая ЭПР и обнаружение объектов, авторы Бляхман А.Б., Рунова И.А. [14]. Эта БРЛС и принимается за прототип. Структурная схема прототипа представлена на фиг. 1. БРЛС-прототип содержит передающую позицию 1, состоящую из передатчика 1.1 и антенны 1.2,излучающей непрерывный квазигармонический сигнал в широком секторе углов в направлении приемной позиции. На приемной позиции 2, удаленной от передающей позиции, расположены приемная антенна 2.1 с многолучевой диаграммой направленности (ДН), один приемный канал в составе приемника 2.2 и блока измерения частоты Доплера 2.3, а также блок измерения пеленга 2.4 и блок формирования траектории и распознавания классов воздушных объектов 2.5. На передающей позиции 1 в качестве источника зондирующего сигнала использован генератор непрерывного квазигармонического сигнала 1.1 и слабонаправленная антенна 1.2, облучающая одновременно весь сектор существования просветного эффекта, на приемной позиции 2 использована приемная антенна 2.1 с многолучевой ДН, охватывающей сектор существования просветного эффекта; антенны на обеих позициях подняты на высоту, достаточную для обеспечения прямой радиовидимости. Пространственно-временная обработка эхо-сигналов на приемной позиции включает: параллельный обзор пространства по угловой координате; спектральный анализ в области доплеровских частот; сравнение с порогом обнаружения; определение первичных (измеряемых) координат fд и , где fд - доплеровское смещение частоты, аугловая координата в горизонтальной плоскости. Завязка трассы и сопровождение воздушных объектов осуществляются по вектору первичных координат fд, , а получение плоскостных координат X, Y - путем функционального преобразования измеренных первичных координат, например, как описано в [11, 12]. Распознавание классов воздушных объектов осуществляется методом, предложенным в [13], на основании анализа ширины доплеровского спектра сигнала при пролете объекта через зону обзора БРЛС. Реализовать режим внешней когерентности за счет сложения в апертуре приемной антенны сигнала, рассеянного целью, и прямого сигнала, который на 3-4 порядка мощнее эхо-сигнала, позволяет ис-1 007143 пользование непрерывного квазигармонического сигнала в качестве зондирующего. Образованные при этом доплеровские биения достаточно просто выделяются после обычного амплитудного детектирования. Спектральный анализ квазигармонического эхо-сигнала позволяет стандартными вычислительными средствами и методами [14] реализовать оптимальную фильтрацию полезного сигнала и одновременно с высокой точностью измерить доплеровское смещение частоты. При этом синхронизации приемной позиции не требуется, а высокий энергетический потенциал БРЛС, как показано в [14], достигается при величине средней мощности излучения менее 10 Вт, которая при непрерывном излучении легко реализуется в любом частотном диапазоне. Измерение координат можно проводить, например, методом, описанным в [11, 12], а именно путем нахождения точки пересечения направления на цель (по измеренному азимуту) и кривой положения равных доплеровских частот. Недостатками вышеуказанной БРЛС являются: низкий динамический диапазон приемника по полезным сигналам из-за влияния прямого сигнала передатчика, который на 60-80 дБ мощнее эхо-сигнала; высокая вероятность ложных тревог из-за влияния сигналов пассивных помех, спектр которых находится вблизи частоты передатчика; недостаточная точность измерения координат воздушных объектов; отсутствие вариантов реализации получаемой радиолокационной информации БРЛС. Эти недостатки устранены в предлагаемой БРЛС. Для этого в БРЛС, принятой за прототип, на стороне приемной позиции введены N приемных каналов (по числу лучей приемной антенны), в каждый из которых включено устройство режекции прямого сигнала передатчика и пассивных помех, вход которого соединен с выходом приемника, а выход - с входом блока измерения частоты Доплера, а также выносное рабочее место оператора, содержащее устройство сопряжения с приемной позицией, соединенное по входу с выходом блока формирования траектории и распознавания классов воздушных объектов, устройство отображения радиолокационной информации и аппаратуру передачи данных. Входы устройства отображения радиолокационной информации и аппаратуры передачи данных соединены с выходом устройства сопряжения с приемной позицией. Техническим результатом предлагаемого изобретения является улучшение тактико-технических и эксплуатационных характеристик БРЛС, а именно повышение точности измерения координат воздушных объектов, защита приемной позиции от влияния прямого сигнала передатчика и сигналов пассивных помех, а также возможность отображения полученной радиолокационной информации и передачи ее на пункты сбора информации и управления (внешнему потребителю). Для более полного понимания сущности заявляемой БРЛС обратимся к иллюстрирующей предлагаемое изобретение структурной схеме. На фиг. 2 представлена структурная схема частного случая реализации заявляемой БРЛС (трехлучевая приемная антенна), где приняты следующие обозначения: 1 - передающая позиция в составе: 1.1 - передатчик; 1.2 - антенна; 2 - приемная позиция в составе: 2.1 - приемная антенна; 2.2 - приемник; 2.3 - блок измерения частоты Доплера; 2.4 - блок измерения пеленга; 2.5 - блок формирования траектории и распознавания классов воздушных объектов; 2.6 - устройство режекции прямого сигнала передатчика и пассивных помех; 3 - выносное рабочее место оператора в составе: 3.1 - устройство сопряжения с приемной позицией; 3.2 - устройство отображения радиолокационной информации; 3.3 - аппаратура передачи данных. Предлагаемая БРЛС содержит передающую позицию 1 в составе передатчика 1.1 и антенны 1.2 передающей позиции, приемную позицию 2 в составе приемной антенны 2.1, N приемных каналов (по числу лучей приемной антенны), каждый из которых состоит из последовательно соединенных приемника 2.2, устройства режекции прямого сигнала передатчика и пассивных помех 2.6 и блока измерения частоты Доплера 2.3, а также блока измерения пеленга 2.4, соединенного последовательно с блоком формирования траектории и распознавания классов воздушных объектов 2.5, причем входы всех N приемников 2.2 соединены с N выходами приемной антенны 2.1, а выходы всех блоков измерения частоты Доплера 2.3, каждый из которых содержит n доплеровских фильтров, соединены с N входами блока измерения пеленга 2.4. Кроме того, БРЛС содержит выносное рабочее место оператора 3 в составе устройства сопряжения с приемной позицией 3.1, соединенного по входу с выходом блока формирования траектории и распознавания классов воздушных объектов 2.5, устройства отображения радиолокационной информа-2 007143 ции 3.2 и аппаратуры передачи данных 3.3, входы последних соединены с выходом устройства сопряжения с приемной позицией 3.1. Предлагаемая БРЛС работает следующим образом. Передатчик 1.1 формирует квазигармонический сигнал, излучаемый антенной 1.2 передающей позиции 1 в широком секторе углов в направлении приемной позиции 2. Приемная антенна 2.1 в рассматриваемом случае реализации - трехлучевая, а в общем случае - многолучевая. Центральный луч ДН приемной антенны 2.1 своим максимумом направлен на антенну 1.2 передающей позиции 1, а два других луча отклонены от центрального луча на 15, перекрывая зону просветного эффекта. В приемных каналах, на выходе каждого из соответствующих приемников 2.2, появляются доплеровские биения частоты сигнала, возникающие при движении воздушных объектов в просветной зоне между передатчиком и приемником. В устройствах режекции прямого сигнала передатчика и пассивных помех 2.6 осуществляется режекция прямого сигнала передатчика и сигналов пассивных помех. При увеличении числа лучей ДН и соответствующем увеличении числа приемных каналов увеличивается точность измерения азимута и, соответственно, точность измерения плоскостных координат. В блоках измерения частоты Доплера 2.3 в каждом приемном канале определяются значения доплеровской частоты fд. Грубое измерение частоты fд происходит по номеру (n) того доплеровского фильтра, сигнал в котором превышает порог обнаружения и является наибольшим по сравнению с сигналами соседних фильтров.fгрд=n fo,где n - номер доплеровского фильтра,fo - частотное расстояние между максимумами доплеровских фильтров. Для уточнения частоты сравниваются амплитуды сигналов в фильтрах, соседних к фильтру с наибольшей амплитудой сигнала, и выбирается сосед с наибольшей амплитудой. Уточнение частоты производится моноимпульсным методом в соответствии с пеленгационной характеристикой Sf, которая является зависимостью частоты от соотношения амплитуд Аmах и Асос сигналов двух выбранных (с наибольшей амплитудой и с амплитудой наибольшего соседа) доплеровских фильтров. Измерение азимута объекта производится аналогичным методом, по соотношению амплитуд сигналов в разных приемных каналах. Для этого в блоке измерения пеленга 2.4 осуществляется сравнение амплитуд сигналов соответствующих доплеровских фильтров разных приемных каналов, определение канала с наибольшим сигналом и канала с сигналом, по величине следующим за максимальным. Грубое значение азимута определяется номером (N) приемного канала с наибольшим сигналом. Уточнение азимута производится моноимпульсным методом в соответствии с пеленгационной характеристикой S зависимостью азимута от соотношения амплитуд Вmах и Всос сигналов двух выбранных (с наибольшей амплитудой и с амплитудой наибольшего соседа) приемных каналов. Измеренные значения первичных параметров объектов (амплитуда, азимут, доплеровская частота) поступают в блок формирования траектории и распознавания классов воздушных объектов 2.5, где производится функциональное преобразование измеренных параметров в плоскостные координаты X, Y и реализация алгоритмов, обеспечивающих: сопровождение объекта по вектору первичных координат; сопровождение объектов по плоскостным координатам; распознавание классов воздушных объектов, например бомбардировщик, истребитель, крылатая ракета, вертолет, легкомоторный самолет. Функциональное преобразование первичных параметров fд, ив плоскостные координаты Х и Y может быть осуществлено одним из методов, рассмотренных в [11, 12], например путем пересечения азимутального направленияи вычисленной поверхности положения равных частот fд. Распознавание классов объектов производится на основании анализа ширины доплеровского спектра сигнала при пролете объекта через зону обзора, например, методом, рассмотренным в [13]. Радиолокационная информация о параметрах воздушных объектов (количество объектов в зоне обзора, класс объекта, его плоскостные координаты Х и Y, скорость объекта) по проводному или радиоканалу связи передается с блока формирования траектории и распознавания классов воздушных объектов 2.5 на устройство сопряжения с приемной позицией 3.1 выносного рабочего места оператора 3 для отображения в устройстве 3.2 и для передачи через аппаратуру передачи данных 3.3 внешнему потребителю. Таким образом, за счет введения на стороне приемной позиции N приемных каналов с устройством режекции прямого сигнала передатчика и пассивных помех в каждом канале, а также выносного рабочего места оператора, в предлагаемой БРЛС улучшены такие тактико-технические характеристики, как точность измерения координат воздушных объектов и защита от влияния прямого сигнала передатчика и-3 007143 сигналов пассивных помех, кроме того, появилась возможность использования радиолокационной информации как самой БРЛС, так и внешним потребителем. Заявляемое техническое решение реализовано в БРЛС, разрабатываемой в настоящее время Нижегородским НИИ радиотехники. Литература 1. Scolnik M.I. Radar Handbook, McGraw-Hill, New York, 1990. 2. Willis N.Y. Bistatic Radar, Technology Service Corporation, 1995. 3. Черняк Б.С. Многопозиционная радиолокация, - M., Радио и связь, 1993. 4. Ufimtsev P.J. Black bodies and the shadow radiation, Journal of Communications Technology andand electronic systems. Vol. AES-21, No. 1, January 1985. 6. Glaser J.I. Bistatic Radars Hold Promise for Future Systems, Microwave System News, 1984, Vol. 14,No. 11, pp. 119-136. 7. Sloane E.A., Salerno J., Candidas E.S. and Skolnik M.I., A Bistatic CW-Radar, Technical Ren. 82,MIT Lincoln Laboratory, Lexington, MA, June 6, 1995, AD 76454. 8. Greenwood Т. Reconnaissance and Arms Control, Scientific American, 228(2), 22, Feb. 1973. 9. Swords S.S. Technical History of the Beginnings of RADAR, IEEE History of Technology Series,Vol. 6, Peter Peregrinus, London, 1986. 10. Бистатическая многофункциональная доплеровская РЛС, патент США 5410314 с приоритетом от 30.11.1993, MПК G01S13/08. 11. Бляхман А.Б., Самарин А.В. Радиолокационный способ определения параметров движения объекта. Патент РФ 2133480 с приоритетом от 2.02.1998, МПК G01S 3/72; 3/74. 12. Бляхман А.Б., Рындык А.Г, Ковалев Ф.Н. Устройство для определения параметров движения цели. Патент РФ 2124220 с приоритетом от 29.10.1997., МПК G01S 13/06. 13. Бляхман А.Б., Матюгин С.Н. Распознавание воздушных объектов при радиолокации на просвет, Радиотехника и электроника, т. 46.11, 2001. 14. Бляхман А.Б., Рунова И.А. Радиолокация на просвет. Бистатическая ЭПР и обнаружение объектов, Радиотехника и электроника, т. 46,3, 2001. ФОРМУЛА ИЗОБРЕТЕНИЯ Бистатическая радиолокационная станция с обнаружением на просвет, содержащая передающую позицию в составе последовательно соединенных передатчика и антенны, направленной на удаленную от передающей приемную позицию, состоящую из последовательно соединенных приемной антенны с многолучевой диаграммой направленности, обращенной в сторону передающей позиции, и одного приемного канала, состоящего из приемника и блока измерения частоты Доплера, а также соединенных последовательно блока измерения пеленга и блока формирования траектории и распознавания классов воздушных объектов, отличающаяся тем, что на приемной позиции введены N приемных каналов по числу лучей диаграммы направленности приемной антенны, в каждый из которых введено устройство режекции прямого сигнала передатчика и пассивных помех, вход которого соединен с выходом приемника, а выход- с входом блока измерения частоты Доплера, причем входы всех N приемников соединены с N выходами приемной антенны, а выходы всех N блоков измерения частоты Доплера соединены с N входами блока измерения пеленга, также введено выносное рабочее место оператора в составе устройства сопряжения с приемной позицией, соединенного по входу с выходом блока формирования траектории и распознавания классов воздушных объектов, устройства отображения радиолокационной информации и аппаратуры передачи данных, входы которых соединены с выходом устройства сопряжения с приемной позицией.
МПК / Метки
МПК: G01S 7/42, G01S 13/06
Метки: радиолокационная, бистатическая, станция
Код ссылки
<a href="https://eas.patents.su/6-7143-bistaticheskaya-radiolokacionnaya-stanciya.html" rel="bookmark" title="База патентов Евразийского Союза">Бистатическая радиолокационная станция</a>
Подвижная наземная двухкоординатная радиолокационная станция кругового обзора метрового диапазона волн
Номер патента: 5898
Опубликовано: 30.06.2005
Авторы: Москаленко Сергей Валерьевич, Харитонов Сергей Александрович, Бомштейн Александр Давидович, Колдоркина Наталья Романовна, Коган Семен Михайлович
МПК: G01S 7/36, G01S 13/72
Метки: обзора, станция, подвижная, метрового, волн, двухкоординатная, диапазона, кругового, радиолокационная, наземная
Формула / Реферат:
1. Подвижная наземная двухкоординатная радиолокационная станция (РЛС) кругового обзора метрового диапазона волн, представляющая собой взаимосвязанный комплекс функциональных и конструктивных технических средств обеспечения потребительского уровня РЛС и включающая перестраиваемое в полосе частот приемопередающее устройство в составе твердотельного монопередатчика, двух формирователей зондирующих сигналов и приемника основного канала, основную...
Радиолокационная установка и способ измерения для определения ориентации и глубины объекта, находящегося под землей
Номер патента: 2451
Опубликовано: 25.04.2002
Авторы: Йенсен Оле Киель, Грегерсен Оле
МПК: G01S 13/04, G01V 3/12
Метки: ориентации, глубины, установка, находящегося, измерения, определения, землей, радиолокационная, способ, объекта
Формула / Реферат:
1. Установка для генерирования информации, указывающей глубину и ориентацию объекта, расположенного под поверхностью земли, причем установка предназначена для использования электромагнитного излучения, излучаемого и принимаемого антенной системой, связанной с установкой и содержащей передатчик и приемник для генерирования электромагнитного излучения совместно с антенной системой и для приема электромагнитного излучения, отраженного от объекта,...
Мобильная станция по распределению жидкости
Номер патента: 5960
Опубликовано: 25.08.2005
Авторы: Зердик Мирослав, Мюллер Рудольф
МПК: B67D 5/64
Метки: станция, мобильная, жидкости, распределению
Формула / Реферат:
1. Передвижная заправочная станция для жидкостей, в частности для топлива, оборудованная дозаторными устройствами, насосным оборудованием и функциональным узлом, включающим в себя блок управления и средства обработки платежных карточек со всеми принадлежностями, расположенные в общем корпусе, характеризующаяся тем, что корпус (1) выполнен в виде каркаса с обшивкой, образованного, как минимум, вертикальными стенами (12), усиленными, как минимум,...
Станция для использования геотермальной энергии
Номер патента: 2169
Опубликовано: 28.02.2002
Авторы: Мое Пер Х., Раббен Кьелл М.
МПК: E21B 43/17, F24J 3/08
Метки: станция, использования, геотермальной, энергии
Формула / Реферат:
1. Станция для эксплуатации геотермальной энергии посредством прокачивания воды по замкнутой системе через геологическую формацию (1) на глубине, по меньшей мере, 1000 м под поверхностью (2) земли, содержащая, по меньшей мере, одну подающую скважину (3), ведущую от поверхности (2) вниз до указанной формации (1), одну отводную скважину (4) для транспортирования нагретой воды от указанной формации к поверхности и теплособирающую систему, имеющую...
Система управления зенитного ракетного комплекса малой дальности
Номер патента: 2202
Опубликовано: 28.02.2002
Авторы: Абрамов Владимир Иванович, Чирков Валерий Иванович, Ботвинов Алексей Кузьмич, Чибисов Станислав Иванович, Морозов Валерий Вениаминович, Ефремов Вениамин Павлович, Парфенов Александр Иванович, Безверхов Михаил Алексеевич, Хворых Юрий Васильевич, Толкачев Михаил Александрович, Корчагин Сергей Николаевич, Беркович Геннадий Михайлович, Войсковский Евгений Иосифович, Фомин Роберт Анатольевич, Дризе Иосиф Матвеевич, Сосков Юрий Александрович, Осипов Валентин Валентинович, Павлов Евгений Яковлевич, Барсукова Софья Алексеевна
МПК: G01S 13/72
Метки: малой, система, дальности, комплекса, ракетного, зенитного, управления
Формула / Реферат:
Система управления зенитного ракетного комплекса малой дальности, включающая размещенные на едином самоходном шасси или в транспортном контейнере средства обнаружения с радиолокатором кругового обзора, радиолокационный запросчик опознавания, средства сопровождения и точного измерения координат цели и ракеты, средства отображения информации, аппаратуру предстартовой подготовки ракеты и производства пуска, радиоответчик, автопилот ракеты,...
Предыдущий патент: Сплав на основе меди и его применение в науглероживающих средах
Следующий патент: Ёмкость со звуковым эффектом
Случайный патент: Соединения бензотиазина и бензотиадиазина, способ их получения и фармацевтические композиции, которые их содержат