Система управления зенитного ракетного комплекса малой дальности
Номер патента: 2202
Опубликовано: 28.02.2002
Авторы: Ефремов Вениамин Павлович, Толкачев Михаил Александрович, Беркович Геннадий Михайлович, Войсковский Евгений Иосифович, Барсукова Софья Алексеевна, Чибисов Станислав Иванович, Хворых Юрий Васильевич, Фомин Роберт Анатольевич, Дризе Иосиф Матвеевич, Сосков Юрий Александрович, Корчагин Сергей Николаевич, Парфенов Александр Иванович, Осипов Валентин Валентинович, Ботвинов Алексей Кузьмич, Абрамов Владимир Иванович, Чирков Валерий Иванович, Павлов Евгений Яковлевич, Морозов Валерий Вениаминович, Безверхов Михаил Алексеевич
Формула / Реферат
Система управления зенитного ракетного комплекса малой дальности, включающая размещенные на едином самоходном шасси или в транспортном контейнере средства обнаружения с радиолокатором кругового обзора, радиолокационный запросчик опознавания, средства сопровождения и точного измерения координат цели и ракеты, средства отображения информации, аппаратуру предстартовой подготовки ракеты и производства пуска, радиоответчик, автопилот ракеты, вычислительные средства управления, включающие вычислитель времени входа цели в зону пуска и вычислитель углового рассогласования, отличающаяся тем, что в нее введены средства парциального управления лучами антенны радиолокатора кругового обзора с фазосдвигающим устройством, устройство слежения по дальности и азимуту, система управления лучом радиолокатора средств сопровождения и точного измерения координат, антенна которого выполнена в виде фазированной антенной решетки, программное устройство поиска, система одновременного сопровождения по четырем координатам соответствующим азимуту, углу места, дальности и частоте Доплера нескольких объектов радиолокатором средств сопровождения и точного измерения координат, устройство управления шириной диаграммы направленности, радиомаяк ракеты, радиолокатор сопровождения радиомаяка ракеты, коммутатор, устройство распознавания класса цели и адаптации режимов работы систем управления ракеты, включая блок спектрального анализа сигналов, вычислитель предстартовой командной информации и углов склонения ракеты после вертикального пуска, устройство анализа результатов пуска, а в вычислительные средства управления введен второй вычислитель времени входа цели в зону пуска, причем диаграмма направленности антенны радиолокационного запросчика опознования развернута по азимуту относительно антенны радиолокатора кругового обзора в направлении, противоположном направлению вращения последней, при этом передатчик радиолокатора кругового обзора подключен к фазосдвигающему устройству средств управления лучами антенны радиолокатора кругового обзора, соединенному с излучателями антенны радиолокатора кругового обзора средств обнаружения, выход приемной системы радиолокатора кругового обзора, которая является "n"-канальной, связан с радиолокационным запросчиком опознавания и с первым входом устройства слежения по дальности и азимуту, второй вход которого соединен с выходом радиолокационного запросчика опознавания, выход устройства слежения по дальности и азимуту связан со вторым вычислителем времени входа целей в зону пуска и с системой одновременного сопровождения по четырем координатам, программное устройство поиска через систему управления лучом подключено к антенне радиолокатора средств сопровождения и точного измерения координат, выходы приемника которого подключены к системе одновременного сопровождения по четырем координатам, вычислитель предстартовой командной информации и углов склонения ракеты связан своим входом с системой одновременного сопровождения по четырем координатам, а выходом с автопилотом ракеты, радиолокатор сопровождения радиомаяка ракеты соединен через устройство управления шириной диаграммы направленности с антенной радиолокатора сопровождения радиоответчика средств сопровождения и точного измерения координат, коммутатор связан своими входами с выходом приемника радиолокатора сопровождения радиоответчика средств сопровождения и точного измерения координат, с радиолокатором сопровождения радиомаяка и с выходом вычислителя углового рассогласования, а выходом с системой сопровождения радиоответчика средств сопровождения и точного измерения координат, входы вычислителя углового рассогласования связаны с системой одновременного сопровождения по четырем координатам и с радиолокатором сопровождения радиомаяка, устройство распознавания класса цели и адаптации режимов работы систем управления ракеты подключено своими входами к системе одновременного сопровождения по четырем координатам и к приемнику радиолокатора средств сопровождения и точного измерения координат, а выходом к устройству передачи управляющей информации на ракеты средств сопровождения и точного измерения координат, устройство анализа результатов пуска подключено своим входом к системе одновременного сопровождения по четырем координатам, а выходом к средствам отображения информации, вход вычислителя времени входа цели в зону пуска подключен к системе одновременного сопровождения по четырем координатам, а выходы обоих вычислителей времени входа цели в зону пуска соединены с аппаратурой предстартовой подготовки ракеты и производства пуска.
Текст
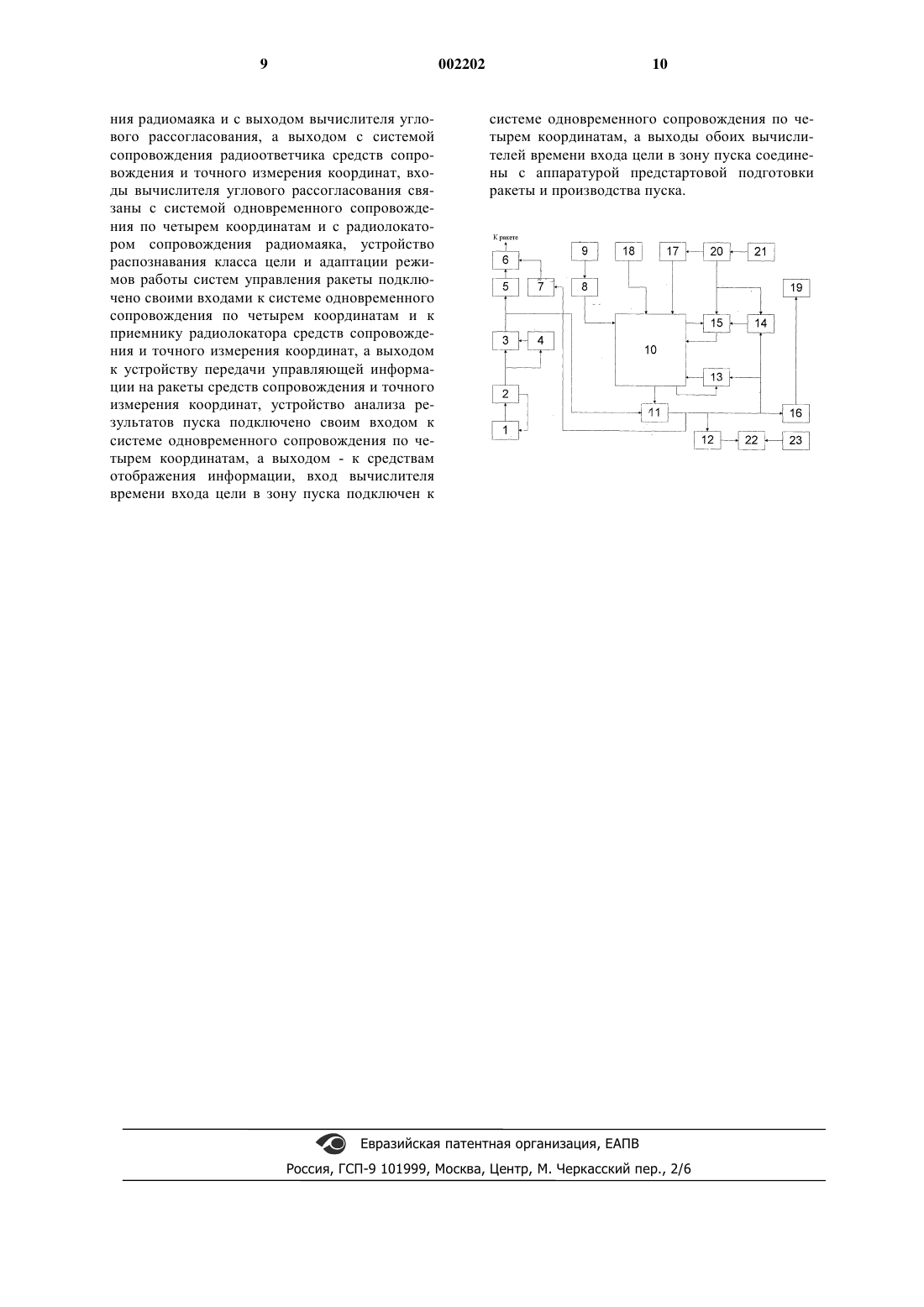
1 Изобретение относится к радиолокационной технике и может быть использовано в системах управляемого оружия противовоздушной обороны (ПВО). Известна система управления Российского войскового ЗРК малой дальности "Оса-АКМ",включающая в свой состав размещенные на едином самоходном шасси средства обнаружения с радиолокатором кругового обзора, радиолокационный запросчик опознавания, средства сопровождения и точного измерения координат цели и ракеты, включая устройство передачи управляющей информации на ракету, средства отображения информации, аппаратуру предстартовой подготовки ракеты и производства пуска, радиоответчик, вычислительные средства управления, содержащие вычислитель времени входа цели в зону пуска и вычислитель углового рассогласования (Техническое описание боевой машины зенитного ракетного комплекса "ОсаАКМ", ГП ИЭМЗ, Ижевск, 1980). Система управления ЗРК "Оса-АКМ" позволяет обнаруживать и сопровождать одиночную цель типа самолет тактической авиации и производить пуск и наведение ракет на нее. Однако в последнее время повысилась плотность воздушного налета, и появился новый класс целей - высокоточное оружие (ВТО). В этих условиях время реакции системы оказывается слишком большим, а энергетический потенциал недостаточным, что приводит к существенному снижению эффективности при борьбе с ВТО и внезапно обнаруженными СВН противника,особенно при их массированном применении. Одноканальность комплекса не позволяет обстреливать несколько целей одновременно, а ограниченный боезапас не дает возможности поразить нужное количество целей. Эти факты следует отнести к недостаткам системы управления этого ЗРК. Целью изобретения является обеспечение поражения ВТО и повышение боевой эффективности ЗРК малой дальности при борьбе с малоразмерными и скоростными целями нового класса за счет уменьшения времени реакции его системы управления и повышения энергетического потенциала. Поставленная цель достигается тем, что в систему управления войскового зенитного ракетного комплекса малой дальности, размещенную на едином самоходном шасси или в транспортном контейнере, введены средства парциального управления лучами антенны радиолокатора кругового обзора с фазосдвигающим устройством, приемная система которого являетсяn-канальной, устройство слежения по дальности и азимуту по информации радиолокатора кругового обзора, система управления лучом радиолокатора сопровождения, антенна которого выполнена в виде фазированной антенной решетки, программное устройство поиска, система одновременного сопровождения по четырем 2 координатам (азимут, угол места, дальность и частота Доплера) нескольких объектов радиолокатором сопровождения, устройство управления шириной диаграммы направленности радиолокатора сопровождения радиоответчика ракеты,радиомаяк ракеты, радиолокатор сопровождения радиомаяка ракеты, коммутатор, устройство распознавания класса цели и адаптации режимов работы систем управления ракеты, включая блок спектрального анализа сигналов, вычислитель предстартовой командной информации и углов склонения ракеты после вертикального пуска, устройство анализа результатов пуска,устройство непрерывного функционального контроля боевой аппаратуры, а в вычислительную систему управления ракетой введен второй вычислитель времени входа цели в зону пуска,причем диаграмма направленности антенны запросчика опознавания развернута по азимуту относительно антенны радиолокатора обзора в направлении, противоположном направлению вращения последней. На чертеже представлена функциональная схема заявляемой системы управления зенитного ракетного комплекса малой дальности. Данная система содержит средства 1 парциального управления лучами антенны с фазосдвигающим устройством за счет изменения частоты передатчика радиолокатора обзора; средства 2 обнаружения с радиолокатором кругового обзора; устройство 3 слежения по дальности и азимуту; радиолокационный запросчик опознавания 4; второй вычислитель 5 времени входа цели в зону пуска; аппаратуру 6 предстартовой подготовки ракеты и производства пуска; вычислитель 7 времени входа цели в зону пуска; систему управления 8 лучом антенны средств 10 сопровождения и точного измерения координат цели и ракеты; программное устройство 9 поиска; систему 11 одновременного сопровождения по четырем координатам (азимут, угол места, дальность и частота Доплера) нескольких объектов радиолокатором сопровождения; устройство 12 анализа результатов пуска; устройство 13 распознавания класса цели и адаптации режимов работы систем управления ракеты, включая блок спектрального анализа сигналов; вычислитель 14 углового рассогласования; коммутатор 15; вычислитель 16 предстартовой командной информации и углов склонения ракеты после вертикального пуска; 3 устройство 17 управления шириной диаграммы направленности радиолокатора сопровождения радиоответчика 18 ракеты средств 10; автопилот 19 ракеты; радиолокатор 20 сопровождения радиомаяка 21 ракеты; средства отображения информации 22; устройство 23 непрерывного функционального контроля боевой аппаратуры. Заявляемое устройство функционирует следующим образом. Передатчик радиолокатора 2 обзора формирует зондирующий сигнал одновременно на нескольких несущих частотах. Благодаря наличию фазосдвигающего высокочастотного устройства 1, соединенного с излучателями антенны радиолокатора 2 обзора, последняя формирует лучи, положение которых в угломестной плоскости зависит от несущей частоты. В связи с этим зондирующий сигнал, сформированный на нескольких частотах, излучается одновременно в нескольких направлениях по углу места. Это обстоятельство позволяет выполнять радиолокационное зондирование пространства одновременно несколькими парциальными угломестными лепестками, что обеспечивает одновременный обзор пространства и, в конечном счете, приводит к уменьшению времени просмотра заданного пространства обзора. Приемник радиолокатора кругового обзора является n-канальным (по числу угломестных парциалов). Радиолокационная информация,принятая n-канальным приемником, поступает в устройство включения передатчика запросчика опознавания 4 для обеспечения автоматического опознавания обнаруженных целей. Координаты обнаруженных целей с выхода n-канального приемника радиолокатора кругового обзора поступают в устройство 3 слежения по дальности и азимуту. Электрическая ось антенны радиолокационного запросчика опознавания 4 отклонена по азимуту от электрической оси антенны радиолокатора обзора 2 в направлении, противоположном направлению вращения антенны, на угол не меньший чем половина ширины луча антенны радиолокационного запросчика опознавания 4 в азимутальной плоскости. Формирование указанной команды на включение передатчика радиолокационного запросчика опознавания начинается с момента обнаружения цели. Длительность этой команды равна интервалу времени, в течение которого происходит пересечение по азимуту обнаруженной цели лучом антенны радиолокационного запросчика опознавания 4. Благодаря всем перечисленным мерам производится автоматическое опознавание "на проходе" каждой обнаруженной цели, т.е. опознавание в том же цикле обзора, в котором цель обнаружена. 4 Радиолокационная информация обнаружения с выхода n-канального приемника радиолокатора кругового обзора средства 2 обнаружения и радиолокационная информация опознавания с выхода радиолокационного запросчика опознавания 4 поступают в устройство 3 слежения по дальности и азимуту. Устройство 3, используя дискретный поток входной информации о координатах целей, которые поступают с темпом обзора, производит непрерывное слежение за этими целями по дальности и азимуту и вырабатывает для системы 11 одновременного сопровождения по четырем координатам нескольких объектов данные целеуказания: сглаженные координаты целей и производные сглаженных координат целей. При этом благодаря поступлению информации опознавания, слежение ведется только за координатами "чужих" целей. Второй вычислитель 5 времени входа цели в зону пуска по данным, получаемым от устройства 3, решает задачу оценки времени входа цели в зону пуска и оценки времени включения аппаратуры 6 предстартовой подготовки ракеты и производства пуска, подающей команды подготовки и пуска на ракету. Таким образом, эти задачи решаются еще до получения информации о координатах цели с выхода средств 10 сопровождения и точного измерения координат цели и ракеты. Данные целеуказания (координаты целей и их производные) с выхода устройства 3 слежения по дальности и азимуту поступают на систему одновременного сопровождения по четырем координатам 11 (азимут, угол места, дальность и частота Доплера) нескольких объектов радиолокатором средств 10 сопровождения и точного измерения координат цели и обрабатываются ими. Антенна радиолокатора средств 10 выполнена в виде фазированной решетки (ФАР). Сопровождение производится в режиме разделенного времени путем последовательного обращения луча ФАР к целям и ракетам. Для перехода на автоматическое сопровождение целей радиолокатором средств 10 без участия оператора программное устройство 9 радиолокационного поиска организует поиск цели в пределах области пространства, обусловленной ошибками целеуказания радиолокатора кругового обзора средств 2. Устройство 9 последовательно вырабатывает координаты угловых положений ФАР, которые поступают в систему управления 8 лучом ФАР. В результате работы системы управления 8 луч ФАР направляется в заданное угловое направление. Последовательные положения диаграммы направленности ФАР могут представлять собой, например, вертикальный растр. В каждом угловом направлении радиолокатор средств 10 излучает зондирующий сигнал. Эхо-сигнал, принятый приемником радиолока 5 тора средств 10, используется для обнаружения целей и определения их координат. При этом используется совместная обработка информации, полученной из нескольких угловых направлений и дискретов дальности и скорости. Совместная обработка может производиться, например, на основе вычисления энергетического центра (центра тяжести пространственной фигуры). Полученные таким образом уточненные координаты целей поступают из радиолокатора средств 10 в следящие системы 11 одновременного сопровождения по четырем координатам. Благодаря достаточной точности определения указанных координат целей, следящие системы одновременного сопровождения по четырем координатам 11 переходят с этого момента на непрерывное автоматическое слежение за целями. Благодаря организованному таким образом поиску целей радиолокатором сопровождения средств 10 в пределах ошибок целеуказания радиолокатора кругового обзора средств обнаружения 2 удается перейти на автоматическое сопровождение целей радиолокатором средств сопровождения 10 за короткое время без участия операторов. Координаты цели с выхода системы одновременного сопровождения 11 поступают на вход вычислителя 7 времени входа цели в зону пуска, который с этого момента рассчитывает уточненное время входа цели в зону пуска и уточняет оценку времени включения аппаратуры 6 предстартовой подготовки ракеты и производства пуска. Сигналы с выхода приемника радиолокатора средств сопровождения 10, а также координаты сопровождаемых целей и их производные из следящих систем одновременного сопровождения 11 поступают на вход устройства распознавания 13. Устройство распознавания определяет признаки, характеризующие сопровождаемую цель. В качестве таких признаков могут использоваться, например, спектральный состав отраженного от цели сигнала, уровень сигнала и параметры движения цели, такие как модуль вектора скорости и высоту сопровождаемой цели. На основании логического анализа сочетаний полученных признаков выносится решение о принадлежности цели одному из классов. Результат распознавания поступает в блок выработки команд управления средств 10 сопровождения радиоответчика 18 для согласования времени и режима подрыва боевой частью ракеты с временем срабатывания радиовзрывателя,что позволяет повысить вероятность поражения цели. В предстартовый период координаты целей с выхода системы сопровождения 11 поступают в вычислитель 16 предстартовой командной информации и углов склонения. Вырабатываемые вычислителем 16 сигналы непрерывно поступают в автопилот 19. Сигналы углов склонения, имевшие место в момент старта, фикси 002202 6 руются запоминающим элементом автопилота 19, и на этапе автономного полета с помощью автопилота 19 и органов управления осуществляется разворот корпуса ракеты таким образом,чтобы направление ее продольной оси было близко к касательной кинематической траектории полета ракеты. При таком положении ракеты в момент начала радиоуправления обеспечивается малая дальность вывода ракеты на кинематическую траекторию и малая дальность до ближней границы зоны поражения. Ракеты стартуют вертикально. Применение вертикального старта ракеты позволяет увеличить возимый боезапас ракет за счет их размещения в центре вращения, что позволяет уменьшить момент инерции и мощность азимутального привода. Сразу после старта радиолокатор 20 сопровождения радиомаяка 21 ракеты осуществляет захват и сопровождение по угловым координатам радиомаяка 21 ракеты. Установка на ракете радиомаяка 21 и введение в состав системы радиолокатора 20 сопровождения этого радиомаяка обеспечивает захват и сопровождение ракеты на этапе ее автономного полета, пока она находится вне пределов сектора сканирования луча ФАР радиолокатора средств 10 сопровождения радиоответчика 18. Одновременно с этим фазированная антенная решетка радиолокатора средств 10 формирует широкую диаграмму направленности для передачи запросных сигналов и приема ответных сигналов радиоответчика 18. Вычислитель 14 угловых рассогласований сравнивает угловые координаты ракеты, измеряемые радиолокатором 20 сопровождения радиомаяка 21 ракеты, и границы сектора сканирования ФАР. Вычислитель 14 угловых рассогласований обеспечивает выдачу целеуказания радиолокатору сопровождения радиоответчика средств 10 от радиолокатора 20 сопровождения радиомаяка 21 и переключение при помощи коммутатора 15 этого радиолокатора средств 10 на автосопровождение радиоответчика 18 по угловым координатам при вхождении ракеты в сектор фазированной антенной решетки. Коммутатор 15 соединен с выходами приемников радиолокатора сопровождения радиоответчика 18 средств 10 и радиолокатора 20 сопровождения радиомаяка 21. В зависимости от положения ракеты относительно сектора сканирования ФАР коммутатор 15 по команде вычислителя 14 углового рассогласования подключает тот или иной приемник к следящей системе радиолокатора сопровождения радиоответчика 18 средств 10. При встреливании ракеты в луч ФАР производится расширение диаграммы направленности ФАР. Устройство 17 расширения диаграммы направленности радиолокатора сопровождения средств 10 обеспечивает захват и сопровождение ракеты по дальности, и радиоуправление ракетой до вхождения ее в сектор рабочих углов 7 ФАР. Устройство расширения диаграммы направленности антенны радиолокатора сопровождения радиоответчика средств 10 может быть выполнено в виде набора датчиков постоянных напряжений, подключаемых к входам усилителей мощности, выходы которых подключены к управляющим обмоткам фазовращателей ФАР. Величины напряжений указанного набора датчиков соответствуют ступенчатой аппроксимации параболической функции, симметричной относительно центрального элемента набора. Описанная схема обеспечивает высоконадежный захват вертикально стартующей ракеты и передачу ракеты в луч ФАР даже при относительно небольшом секторе отклонения луча при использовании малоэлементной ФАР. Сигналы производных координат сопровождаемых целей из систем 11 одновременного сопровождения по четырем координатам поступают на вход устройства 12 анализа результата боевой работы, которое на основании изменения характера зависимости угловых скоростей цели от времени выносит решение о факте поражения целей, которые отображаются системой отображения информации 22. Контроль исправности аппаратуры всей системы управления ЗРК осуществляется устройством 23, которое связано со средствами 2 обнаружения, радиолокационным запросчиком опознавания 4, средствами 10 сопровождения и точного измерения координат целей и ракет и радиолокатором 20 сопровождения радиомаяка 21 ракеты (эти связи на чертеже не показаны). Результаты контроля исправности аппаратуры отображаются системой отображения информации 22. Введение устройства 23 обеспечивает постоянный контроль готовности аппаратуры системы управления ЗРК и дает возможность оператору оперативно вмешиваться в процесс функционирования, что способствует повышению боеготовности ЗРК. ФОРМУЛА ИЗОБРЕТЕНИЯ Система управления зенитного ракетного комплекса малой дальности, включающая размещенные на едином самоходном шасси или в транспортном контейнере средства обнаружения с радиолокатором кругового обзора, радиолокационный запросчик опознавания, средства сопровождения и точного измерения координат цели и ракеты, средства отображения информации, аппаратуру предстартовой подготовки ракеты и производства пуска, радиоответчик, автопилот ракеты, вычислительные средства управления, включающие вычислитель времени входа цели в зону пуска и вычислитель углового рассогласования, отличающаяся тем, что в нее введены средства парциального управления лучами антенны радиолокатора кругового обзора с фазосдвигающим устройством, устройство слежения по дальности и азимуту, система управ 002202 8 ления лучом радиолокатора средств сопровождения и точного измерения координат, антенна которого выполнена в виде фазированной антенной решетки, программное устройство поиска, система одновременного сопровождения по четырем координатам соответствующим азимуту, углу места, дальности и частоте Доплера нескольких объектов радиолокатором средств сопровождения и точного измерения координат,устройство управления шириной диаграммы направленности, радиомаяк ракеты, радиолокатор сопровождения радиомаяка ракеты, коммутатор, устройство распознавания класса цели и адаптации режимов работы систем управления ракеты, включая блок спектрального анализа сигналов, вычислитель предстартовой командной информации и углов склонения ракеты после вертикального пуска, устройство анализа результатов пуска, а в вычислительные средства управления введен второй вычислитель времени входа цели в зону пуска, причем диаграмма направленности антенны радиолокационного запросчика опознования развернута по азимуту относительно антенны радиолокатора кругового обзора в направлении, противоположном направлению вращения последней, при этом передатчик радиолокатора кругового обзора подключен к фазосдвигающему устройству средств управления лучами антенны радиолокатора кругового обзора, соединенному с излучателями антенны радиолокатора кругового обзора средств обнаружения, выход приемной системы радиолокатора кругового обзора, которая является "n"-канальной, связан с радиолокационным запросчиком опознавания и с первым входом устройства слежения по дальности и азимуту,второй вход которого соединен с выходом радиолокационного запросчика опознавания, выход устройства слежения по дальности и азимуту связан со вторым вычислителем времени входа целей в зону пуска и с системой одновременного сопровождения по четырем координатам, программное устройство поиска через систему управления лучом подключено к антенне радиолокатора средств сопровождения и точного измерения координат, выходы приемника которого подключены к системе одновременного сопровождения по четырем координатам,вычислитель предстартовой командной информации и углов склонения ракеты связан своим входом с системой одновременного сопровождения по четырем координатам, а выходом с автопилотом ракеты, радиолокатор сопровождения радиомаяка ракеты соединен через устройство управления шириной диаграммы направленности с антенной радиолокатора сопровождения радиоответчика средств сопровождения и точного измерения координат, коммутатор связан своими входами с выходом приемника радиолокатора сопровождения радиоответчика средств сопровождения и точного измерения координат, с радиолокатором сопровожде 9 ния радиомаяка и с выходом вычислителя углового рассогласования, а выходом с системой сопровождения радиоответчика средств сопровождения и точного измерения координат, входы вычислителя углового рассогласования связаны с системой одновременного сопровождения по четырем координатам и с радиолокатором сопровождения радиомаяка, устройство распознавания класса цели и адаптации режимов работы систем управления ракеты подключено своими входами к системе одновременного сопровождения по четырем координатам и к приемнику радиолокатора средств сопровождения и точного измерения координат, а выходом к устройству передачи управляющей информации на ракеты средств сопровождения и точного измерения координат, устройство анализа результатов пуска подключено своим входом к системе одновременного сопровождения по четырем координатам, а выходом - к средствам отображения информации, вход вычислителя времени входа цели в зону пуска подключен к 10 системе одновременного сопровождения по четырем координатам, а выходы обоих вычислителей времени входа цели в зону пуска соединены с аппаратурой предстартовой подготовки ракеты и производства пуска.
МПК / Метки
МПК: G01S 13/72
Метки: комплекса, дальности, управления, система, зенитного, малой, ракетного
Код ссылки
<a href="https://eas.patents.su/6-2202-sistema-upravleniya-zenitnogo-raketnogo-kompleksa-malojj-dalnosti.html" rel="bookmark" title="База патентов Евразийского Союза">Система управления зенитного ракетного комплекса малой дальности</a>
Система управления газлифтной добычей нефти из нефтяной скважины
Номер патента: 484
Опубликовано: 26.08.1999
Авторы: Корннеф Питер, Дер Киндерен Вильхельмус Йоханес Годефридус Йозеф
МПК: E21B 43/12
Метки: нефтяной, система, добычей, скважины, управления, газлифтной, нефти
Формула / Реферат:
1. Система управления добычей сырой нефти через эксплуатационную трубу, которая проходит в скважину для газлифтной добычи нефти и в которую нагнетают газлифт в нисходящую скважину, причем система содержит регулируемый дроссель для регулирования потока сырой нефти через эксплуатационную трубу и модуль управления для динамического регулирования открывания дросселя, который использует давление, измеренное манометром в трубопроводе для нагнетания...
Система дистанционного управления для транспортного средства.
Номер патента: 298
Опубликовано: 29.04.1999
Автор: Кеннет Е.Флик
МПК: B60R 25/10, E05B 49/00
Метки: дистанционного, система, управления, средства, транспортного
Формула / Реферат:
1. Система дистанционного управления (10) для транспортного средства, содержащая, по меньшей мере, один уникально закодированный дистанционный передатчик (50), средство проверки дистанционного передатчика, приемник (13), расположенный внутри транспортного средства для приема сигнала, по меньшей мере, от одного уникально закодированного дистанционного передатчика; и средство обучения дистанционного передатчика (47), оперативно подключаемое к...
Система дистанционного управления для сосуда высокого давления
Номер патента: 1857
Опубликовано: 27.08.2001
Автор: Фетцер Келли
МПК: B65G 69/18, C10B 25/10, B01J 3/03...
Метки: управления, дистанционного, система, сосуда, давления, высокого
Формула / Реферат:
1. Система для управления сосудом, содержащая: по крайней мере, один механизм перемещения затвора для удаления затвора сосуда с отверстия в сосуде, причем механизм перемещения затвора, по крайней мере частично, управляется дистанционно; по крайней мере, один соединительный узел для герметизации или разгерметизации сосуда, причем соединительный узел, по крайней мере частично, управляется дистанционно; и по крайней мере, одну разгрузочную систему...
Способ аэробаллистического управления аэродинамическим летательным аппаратом
Номер патента: 1027
Опубликовано: 28.08.2000
Авторы: Светлов Владимир Григорьевич, Архангельский Иван Иванович, Иофинов Евгений Самуилович, Чуев Эдуард Матвеевич
МПК: F41G 7/34
Метки: способ, управления, аэробаллистического, аэродинамическим, летательным, аппаратом
Формула / Реферат:
Способ аэробаллистического управления аэродинамическим летательным аппаратом, основанный на осуществлении полета по произвольной траектории с нисходящим участком полета до заданной зоны разворота и развороте вектора скорости летательного аппарата, отличающийся тем, что после разворота вектора скорости летательного аппарата осуществляют переход на режим планирующего полета, а на нисходящем участке траектории производят разворот вектора скорости...
Способ получения лекарственного комплекса
Номер патента: 1897
Опубликовано: 22.10.2001
Авторы: Иноуе Казухиро, Икеда Масахиро, Сусаки Хироси
МПК: A61P 35/00, A61K 47/48
Метки: комплекса, получения, способ, лекарственного
Формула / Реферат:
1. Способ получения лекарственного комплекса, в котором производное полисахарида, имеющее карбоксильные группы, и остаток лекарственного соединения связаны друг с другом с помощью спейсера, содержащего аминокислоту, или спейсера, содержащего пептидно связанные 2-8 аминокислоты, характеризующийся тем, что соль органического амина и полисахаридного производного, имеющего карбоксильные группы, взаимодействует со спейсером, присоединенным к...
Предыдущий патент: Новые производные арилглицинамида, способ их получения и фармацевтическая композиция , содержащая эти соединения
Следующий патент: Меченные 19фтором производные антрациклинона и антрациклина, фармацевтическая композиция на их основе и их применение для лечения или диагностики амилоидоза
Случайный патент: Игровой автомат, способ управления игрой и игровая система