Подвижная наземная двухкоординатная радиолокационная станция кругового обзора метрового диапазона волн
Номер патента: 5898
Опубликовано: 30.06.2005
Авторы: Коган Семен Михайлович, Москаленко Сергей Валерьевич, Бомштейн Александр Давидович, Харитонов Сергей Александрович, Колдоркина Наталья Романовна
Формула / Реферат
1. Подвижная наземная двухкоординатная радиолокационная станция (РЛС) кругового обзора метрового диапазона волн, представляющая собой взаимосвязанный комплекс функциональных и конструктивных технических средств обеспечения потребительского уровня РЛС и включающая перестраиваемое в полосе частот приемопередающее устройство в составе твердотельного монопередатчика, двух формирователей зондирующих сигналов и приемника основного канала, основную антенну с датчиком угла ее поворота, устройство компенсации шумовых активных помех, включающее компенсационную антенну, приемник компенсационного канала и автокомпенсатор, устройство первичной обработки радиолокационных сигналов, состоящее из двух блоков обнаружения сигналов - дальней и ближней зон, коммутатора сигналов, блока подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны, блока пеленга постановщиков активных помех и блока измерения координат, устройство вторичной обработки радиолокационной информации и сопряжения, устройство отображения, управления и контроля, причем выходы двух формирователей зондирующих сигналов соединены с двумя входами твердотельного монопередатчика, выход которого соединен со входом основной антенны, первый выход которой соединен со входом приемника основного канала, выход которого соединен со входом блока пеленга постановщиков активных помех и с первым входом автокомпенсатора, второй, третий и четвертый входы которого соединены с тремя выходами приемника компенсационного канала, четыре входа которого соединены с четырьмя выходами компенсационной антенны, а пятый его вход соединен со вторым выходом основной антенны, выход автокомпенсатора через параллельно соединенные блоки обнаружения сигналов дальней и ближней зон соединен, соответственно, с первым и вторым входами коммутатора сигналов, выход которого соединен с входом блока подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны, выход которого соединен с первыми входами блока измерения координат и устройства отображения, управления и контроля, второй и третий входы которого соединены, соответственно, с первым выходом блока измерения координат и вторым выходом блока пеленга постановщиков активных помех, первый выход которого соединен со вторым входом блока измерения координат, второй выход которого соединен с входом устройства вторичной обработки радиолокационной информации и сопряжения, выход-вход которого соединен с входом-выходом устройства отображения, управления и контроля, при этом для размещения аппаратуры РЛС используется кабина транспортного средства, разделенная шумопоглощающей стенкой с дверью на обитаемый отсек с рабочим местом оператора, содержащим устройство отображения, управления и контроля и устройство вторичной обработки радиолокационной информации и сопряжения, и аппаратный отсек с аппаратным шкафом, содержащим приемопередающее устройство, устройство первичной обработки радиолокационных сигналов, приемник компенсационного канала и автокомпенсатор шумовых активных помех и конструктивно сопряженным с оснащенным холодильной установкой оборудованием приточно-вытяжного воздушного охлаждения, расположенным под днищем кабины и обеспечивающим охлаждение аппаратуры шкафа и вентиляцию обитаемого отсека кабины.
2. РЛС по п.1, в которой твердотельный монопередатчик содержит большое число, исчисляемое десятками и более усилителей мощности, выходы которых суммируются, при этом усилители мощности выполнены в виде герметичных модулей по тонкопленочной технологии на микрополосковых линиях.
3. РЛС по п.1, в которой компенсационная антенна является стационарной и содержит четыре излучателя, расположенные попарно под углом 90ш в горизонтальной плоскости на двух мачтах, установленных по разные стороны основной антенны так, чтобы угол между всеми четырьмя излучателями в горизонтальной плоскости составлял 90ш.

Текст
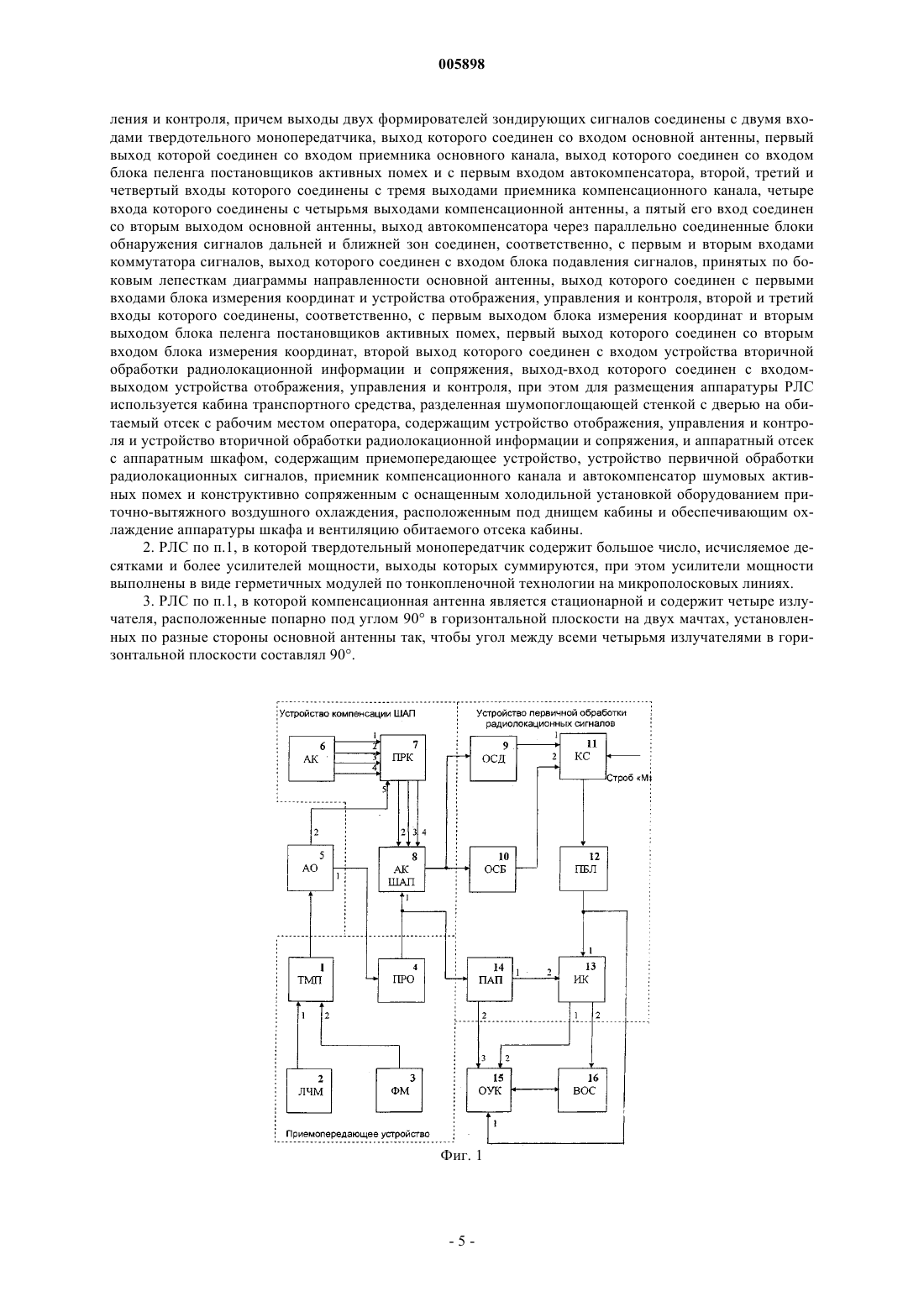
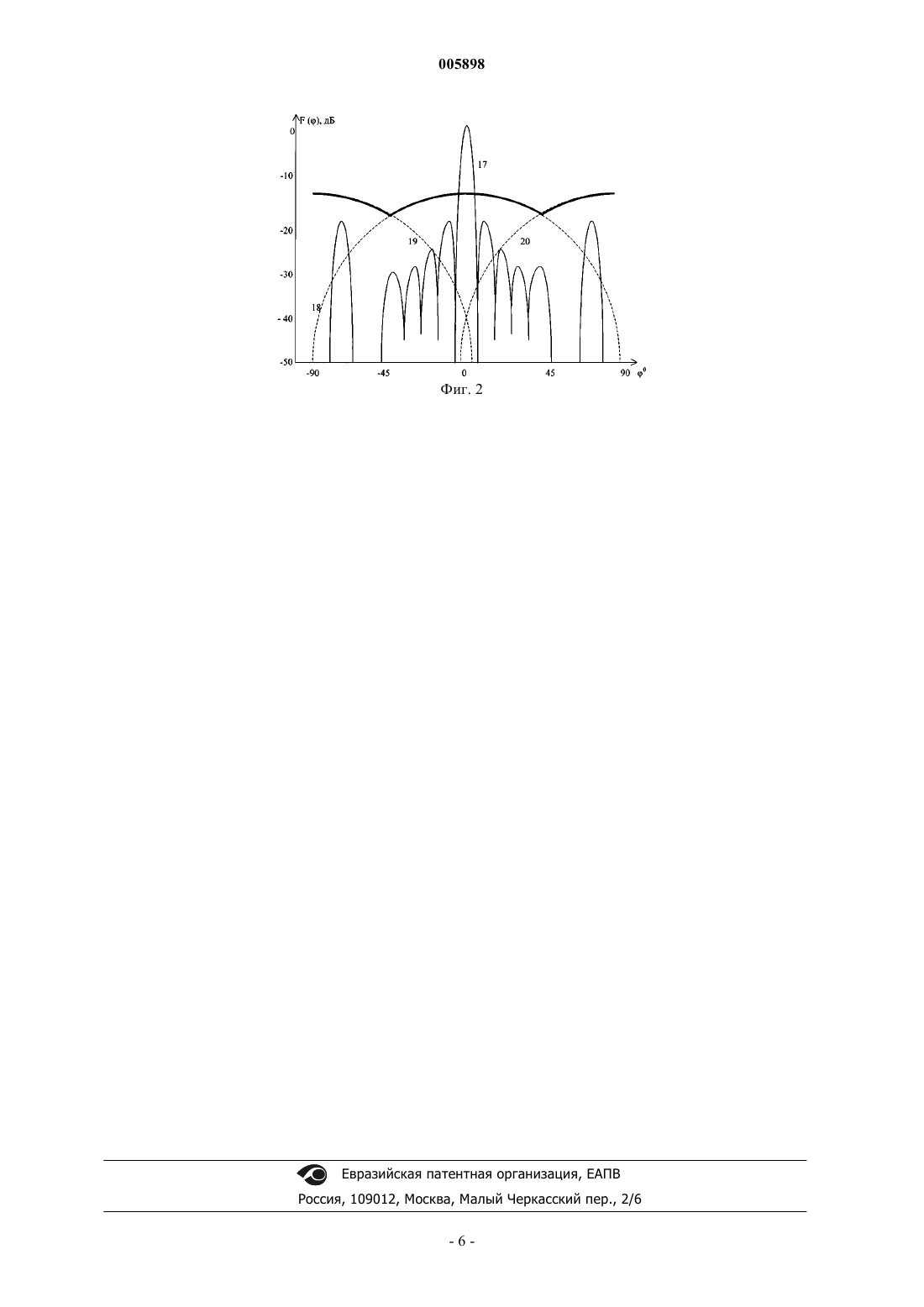
005898 Изобретение относится к радиолокации и может быть использовано для обнаружения воздушных целей, измерения их координат и выдачи целеуказания по дальности и азимуту как при автономной работе, так и при работе в составе автоматизированных систем управления. Традиционно проблемы, решаемые при создании радиолокационной станции (РЛС), обособлены из-за группирования разнородных функциональных, конструктивных и иных технических средств, привлекаемых для повышения технических, эксплуатационных или конструктивных параметров РЛС. Однако рынок кроме предпочтительной ориентации на высокие отдельные показатели РЛС диктует требования к потребительским качествам техники, возникающим в результате оптимизации сочетания технических, эксплуатационных и стоимостных характеристик, определяющих повышенный спрос на ту или иную модель в пределах одной разновидности РЛС. Таким образом, возникает проблема взаимоувязки функционального, конструктивного, ресурсного и иного совершенствования РЛС, определяемого рыночным заказом, и РЛС предстает в качестве единого комплекса электронных, конструктивных, материально-технических и иных средств, позволяющего в той или иной мере обеспечить выходные параметры РЛС в лучших эксплуатационных и стоимостных условиях. Известны РЛС, представляющие собой функционально-конструктивные комплексы аналогичного заявляемому назначения [1,2]. РЛС [1] содержит антенну и размещенные в кабине приемопередающее устройство на электровакуумных приборах, устройство защиты РЛС от пассивных и несинхронных импульсных помех и другие необходимые системы, обеспечивающие работоспособность РЛС. Недостатком этой РЛС является низкая точность измерения координат, длительное время включения и переключения на другую частоту, незащищенность от активных помех, невысокая надежность и в целом низкий потребительский уровень решения радиолокационной задачи. РЛС [2] кроме вышеперечисленных устройств содержит устройства компенсации шумовых активных помех (ШАП) и пеленга помехоносителя, однако имеет недостаточно высокую точность измерения координат и не соответствующие спросу эксплуатационные характеристики. Указанные аналоги являются наиболее близкими по технической сущности к заявляемой РЛС, но представляют собой поколение электровакуумных РЛС. Сведения о реализации подвижной наземной двухкоординатной РЛС кругового обзора метрового диапазона волн с твердотельным монопередатчиком, размещенным в кабине транспортного средства, заявителем не выявлены, т.е. прототип заявляемого решения отсутствует. В связи с этим формула изобретения составлена без разделения на ограничительную и отличительную части. Предлагаемое изобретение расширяет арсенал двухкоординатных РЛС кругового обзора метрового диапазона волн и позволяет повысить потребительский уровень РЛС при оптимальном сочетании достигаемых технических, эксплуатационных и стоимостных характеристик, что обеспечивается использованием в РЛС взаимосвязанного комплекса функциональных и конструктивных технических средств, который включает перестраиваемое в полосе частот приемопередающее устройство, основную антенну,устройство компенсации шумовых активных помех, устройство первичной обработки радиолокационных сигналов, устройство вторичной обработки радиолокационной информации и сопряжения, а также устройство отображения, управления и контроля с соответствующими связями, при этом для размещения аппаратуры РЛС используется кабина транспортного средства, разделенная шумопоглощающей стенкой с дверью на обитаемый отсек с рабочим местом оператора и аппаратный отсек с аппаратным шкафом,конструктивно сопряженным с оснащенным холодильной установкой оборудованием приточновытяжного воздушного охлаждения, расположенным под днищем кабины и обеспечивающим охлаждение аппаратного шкафа и вентиляцию обитаемого отсека кабины. Для пояснения работы предлагаемого изобретения приведены структурная схема РЛС (фиг. 1) и расчетные диаграммы направленности (ДН) основной и компенсационной антенн в азимутальной плоскости (фиг. 2). На фиг. 1 обозначены 1-4 - приемопередающее устройство, где 1 - твердотельный монопередатчик (ТМП),2 - формирователь линейно-частотно-модулированного зондирующего сигнала (ЛЧМ),3 - формирователь фазоманипулированного зондирующего сигнала (ФМ),4 - приемник основного канала (ПРО); 5 - основная антенна с датчиком угла ее поворота (АО); 6-8 - устройство компенсации шумовых активных помех (ШАП), где 6 - компенсационная антенна (АК),7 - приемник компенсационного канала (ГТРК),8 - автокомпенсатор ШАП (АК ШАП); 9-14 - устройство первичной обработки радиолокационных сигналов, где 9 - блок обнаружения сигналов дальней зоны (ОСД),10 - блок обнаружения сигналов ближней зоны (ОСБ),11 - коммутатор сигналов (КС),-1 005898 12 - блок подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны (ПБЛ),13 - блок измерения координат (ИК),14 - блок пеленга постановщиков активных помех (ПАП),15 - устройство отображения, управления и контроля (ОУК); 16 - устройство вторичной обработки радиолокационной информации и сопряжения (ВОС). Стрелками показаны связи между блоками и устройствами. На фиг. 2 показаны диаграммы направленности 17 основной антенны 5 и отдельных излучателей 18, 19, 20 компенсационной антенны 6, сплошной жирной линией показана объединенная ДН компенсационной антенны 6. Как видно из структурной схемы, РЛС содержит приемопередающее устройство в составе твердотельного монопередатчика 1, двух формирователей 2, 3 зондирующих сигналов и приемника основного канала 4, основную антенну 5 с датчиком угла ее поворота, устройство компенсации шумовых активных помех, включающее компенсационную антенну 6, приемник компенсационного канала 7 и автокомпенсатор ШАП 8, устройство первичной обработки радиолокационных сигналов, состоящее из двух блоков обнаружения сигналов - дальней 9 и ближней 10 зон, коммутатора сигналов 11, блоков подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны 12, пеленга постановщиков активных помех 14 и блока измерения координат 13, устройство вторичной обработки радиолокационной информации и сопряжения 16, устройство отображения, управления и контроля 15,причем выходы двух формирователей 2,3 зондирующих сигналов соединены с первым и вторым входами твердотельного монопередатчика 1, выход которого соединен с входом основной антенны 5, первый выход которой соединен со входом приемного устройства основного канала 4, выход которого соединен с входом блока пеленга постановщиков активных помех 14 и с первым входом автокомпенсатора ШАП 8,второй, третий и четвертый входы которого соединены с тремя выходами приемника компенсационного канала 7, четыре входа которого соединены с четырьмя выходами компенсационной антенны 6, а пятый его вход соединен со вторым выходом основной антенны 5, выход автокомпенсатора ШАП 8 через параллельно соединенные блоки обнаружения сигналов дальней 9 и ближней 10 зон соединен, соответственно, с первым и вторым входами коммутатора сигналов 11, выход которого соединен с входом блока подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны 12, выход которого соединен с первыми входами блока измерения координат 13 и устройства отображения, управления и контроля 15, второй и третий входы которого соединены, соответственно, с первым выходом блока измерения координат 13 и вторым выходом блока пеленга постановщиков активных помех 14, первый выход которого соединен со вторым входом блока измерения координат 13, второй выход которого соединен с входом устройства вторичной обработки радиолокационной информации и сопряжения 16, выход-вход которого соединен с входом-выходом устройства отображения, управления и контроля 15. Для размещения аппаратуры РЛС используется кабина транспортного средства, разделенная шумопоглощающей стенкой с дверью на обитаемый отсек с рабочим местом оператора, содержащим устройство отображения, управления и контроля и устройство вторичной обработки радиолокационной информации и сопряжения, и аппаратный отсек с аппаратным шкафом, содержащим приемопередающее устройство, устройство первичной обработки радиолокационных сигналов, приемник компенсационного канала и автокомпенсатор шумовых активных помех и конструктивно сопряженным с оснащенным холодильной установкой оборудованием приточно-вытяжного воздушного охлаждения, расположенным под днищем кабины и обеспечивающим охлаждение аппаратуры шкафа и вентиляцию обитаемого отсека кабины. Твердотельный монопередатчик 1 содержит большое число (десятки и более) усилителей мощности, выходы которых суммируются; это позволяет существенно повысить надежность твердотельного монопередатчика и всей РЛС в целом, так как при выходе из строя одного или нескольких усилителей мощности средняя выходная мощность Рср твердотельного монопередатчика уменьшается незначительно, а дальность обнаружения РЛС практически не изменяется, поскольку она пропорциональна корню четвертой степени из Рср. Усилители мощности выполнены в виде герметичных модулей по тонкопленочной технологии на микрополосковых линиях. Основная антенна 5 представляет собой антенную решетку, состоящую из 16 излучателей, расположенных в два этажа по 8 излучателей в этаже, и установленную на мачтовом устройстве, размещенном на платформе автомобиля. Основная антенна 5 работает в круговом режиме и содержит датчик угла ее поворота. Компенсационная антенна 6 является стационарной и содержит четыре излучателя, расположенные попарно под углом 90 в горизонтальной плоскости на двух мачтах, установленных по разные стороны основной антенны так, чтобы угол между всеми четырьмя излучателями в горизонтальной плоскости составлял 90. РЛС работает следующим образом.-2 005898 С целью обеспечения требуемых значений разрешающей способности по дальности и вероятности обнаружения цели на фоне местных предметов зондирование пространства осуществляется двумя последовательностями импульсов: основной, длительность импульсов которой выбирается из условия обеспечения требуемого энергетического потенциала РЛС, и дополнительной последовательностью коротких импульсов, имеющих меньшую среднюю мощность, предназначенной для обнаружения радиолокационных целей, находящихся в ближней зоне на дальностях, соответствующих длительности зондирующего импульса основной последовательности. Обе последовательности импульсов имеют одинаковую среднюю частоту повторения, но смещены во времени. В качестве основной последовательности импульсов используются линейно-частотномодулированные (ЛЧМ) сигналы, а в качестве дополнительной - сигналы, фазоманипулированные (ФМ) по закону Баркера [3]. Эти сигналы, формируемые, соответственно, блоками 2 и 3, усиливаются по высокой частоте твердотельным монопередатчиком 1 и через антенный коммутатор (не показанный на фиг. 1) излучаются основной антенной 5 в пространство. Отраженные от цели эхосигналы, принятые основной антенной 5, через антенный коммутатор поступают в приемник основного канала 4, где селектируются по частоте, усиливаются и преобразуются в цифровой код. С выхода приемника основного канала 4 сигналы поступают на вход 1 трехканального автокомпенсатора ШАП 8, а на входы 2, 3, 4 - сигналы с приемника компенсационного канала 7, на который поступают четыре сигнала стационарной компенсационной антенны 6. При вращении основной антенны 5 через каждые 90 по сигналу датчика угла ее поворота в приемнике компенсационного канала 7 производится выбор тех трех из четырех сигналов излучателей компенсационной антенны 6, диаграммы направленности которых в данный момент перекрывают переднюю полусферу основной антенны 5. Таким образом, с помощью переключения сигналов излучателей объединенная ДН компенсационной антенны 6 вращается в горизонтальной плоскости дискретно, синхронно с вращением основной антенны 5, обеспечивая прием сигналов, приходящих с любого азимутального направления от 0 до 360. При совместной работе трех компенсационных каналов автокомпенсатор ШАП 8 обеспечивает подавление ШАП, воздействующих по боковым лепесткам ДН основной антенны 5 с одного, двух или трех направлений [4]. С выхода автокомпенсатора ШАП 8 сигнал поступает на входы блоков обнаружения сигналов дальней 9 и ближней 10 зон устройства первичной обработки радиолокационных сигналов [5]. В блоке ОСД 9 производится обнаружение и подавление несинхронной импульсной помехи, длительность которой много меньше длительности зондирующего сигнала, обнаружение эхосигналов на фоне собственных шумов приемного тракта, стабилизация уровня ложных тревог, оптимальная внутрипериодная обработка (сжатие) эхосигналов ЛЧМ-фильтром, а также оптимальная межпериодная обработка азимутального пакета эхосигналов с помощью когерентного накопителя, обеспечивающего минимальные потери в отношении сигнал-шум и позволяющего обнаружить эхосигнал в условиях воздействия дипольных помех. Блок ОСБ 10 обеспечивает защиту РЛС от пассивных помех в зоне местных предметов, оптимальную внутрипериодную обработку сигналов (сжатие) фильтром ФМ сигналов, некогерентное накопление азимутального пакета, стабилизацию уровня ложных тревог [6], защиту от несинхронных импульсных помех. В коммутаторе сигналов 11 происходит объединение информации из блоков обнаружения сигналов двух зон. Управление коммутатором сигналов 11 осуществляется при помощи кругового строба (строб М), длительность которого устанавливается оператором, исходя из размеров зоны местных предметов для конкретной позиции РЛС. С выхода коммутатора 11 сигнал поступает через блок ПБЛ 12, устраняющий прием сигналов по боковым лепесткам ДН основной антенны 5 [7], на первые входы блока измерения координат 13 и устройства отображения, управления и контроля 15. На второй вход блока измерения координат 13 поступает сигнал с блока пеленга постановщиков активных помех 14. Этот сигнал формируется из сигнала основной антенны 5, который после усиления в приемнике основного канала 4 подается на вход блока пеленга постановщиков активных помех 14. Сигнал пеленга формируется в момент времени, когда уровень помехи, принятой по основному лепестку ДН антенны 5, превышает уровень порога обнаружения пеленга [8]. С выхода 2 блока пеленга постановщиков активных помех 14 на вход 3 устройства отображения,управления и контроля 15 поступает сигнал, несущий информацию об уровне мощности активных помех, который отображается на индикаторе кругового обзора устройства отображения, управления и контроля 15 с указанием направления на источник помехи и ее мощности, что позволяет оператору выбрать другую рабочую частоту РЛС, свободную от активных помех в нужном направлении [9]. В блоке измерения координат 13 производится измерение азимута и дальности цели и азимута (пеленга) постановщика активной помехи. По результатам измерений формируются соответствующие кодограммы, которые передаются на устройства отображения, управления и контроля 15 и вторичной обработки радиолокационной информации и сопряжения 16.-3 005898 Устройство вторичной обработки радиолокационной информации и сопряжения 16 обеспечивает автоматическое и полуавтоматическое обнаружение и сопровождение траекторий движения целей [5, 10] по информации, поступающей от блока измерения координат 13, обмен информацией с устройством ОУК 15, выдачу первичной и вторичной радиолокационной информации потребителям (комплексам средств автоматизации), обмен информацией с радиовысотомером и радиозапросчиком. Устройство отображения, управления и контроля 15 обеспечивает отображение на индикаторе кругового обзора первичной, вторичной и служебной информации, поступающей с блоков ПБЛ 12, ИК 13,ПАП 14 и устройства ВОС 16 [11]. Устройство отображения, управления и контроля 15 обеспечивает также управление режимами работы РЛС, управление радиовысотомером и радиозапросчиком через устройство ВОС 16, контроль основных параметров, определяющих тактико-технические характеристики РЛС, в том числе контроль ряда параметров без нарушения штатного режима работы РЛС, и автоматизированный поиск неисправностей [12]. Из описания видно, что признаки, характеризующие предлагаемую РЛС, а именно: твердотельный монопередатчик метрового диапазона волн, особенности его конструктивного исполнения, конструктивная реализация охлаждения аппаратного шкафа с монопередатчиком, кабина, разделенная на обитаемый и аппаратный отсеки со звукоизоляцией между ними, особенности конструкции и размещения стационарной компенсационной антенны, наличие двух формирователей зондирующих сигналов и, соответственно, двух блоков обнаружения сигналов дальней и ближней зон, обладая новизной выполнения отдельных устройств, позволяют в совокупности с остальными признаками создать двухкоординатную РЛС кругового обзора метрового диапазона волн и при этом расширить арсенал РЛС подобного назначения, обеспечить необходимые технические и улучшить такие эксплуатационные характеристики, как простота, надежность, ресурс, ремонтопригодность (в том числе и из-за применения твердотельного передатчика вместо лампового), безопасность (из-за отсутствия высокого напряжения) и комфортность работы при сравнительно невысокой стоимости (с учетом всего жизненного цикла РЛС), тем самым повысив ее потребительский уровень. В соответствии с материалами заявки изготовлен опытный образец РЛС, испытания которого подтвердили возможность достижения указанного технического результата. Таким образом, можно сделать вывод о том, что приведенные в формуле изобретения признаки существенны, а в целом изобретение соответствует критериям промышленной применимости и патентоспособности. Источники информации 1. РЛС 1 РЛ 131, Техническое описание, ч. 1, Горький, 1974. 2. РЛС 1 Л 13, Техническое описание, ч. 1, Горький, 1986. 3. Справочник по радиолокации/Ред. М. Сколник. Т.3. М.: Сов. Радио, 1979. 4. Радиоэлектронные системы. Основы построения и теория: Справочник/Ред. Я.Д. Ширман. ЗАО МАКВИС, 1998. 5. С.З. Кузьмин. Цифровая радиолокация. Киев: КВИЦ, 2000. 6. Приемное устройство. Пат. RU 2212041, МПК G 01 S 7/36, з-ка 03126435 от 23.10.85. 7. Устройство для подавления эхосигналов, принятых по боковым лепесткам диаграммы направленности антенны. Пат. RU2123708, МПК G 01 S 7/36, з-ка 03167328 от 02.04.87. 8. Амплитудный пеленгатор для постановщиков активных помех. Пат. RU2074403, з-ка 2222204 от 06.06.77. 9. РЛС 1 Л 13, Техническое описание, ч. 2, Горький, 1986. 10. С.З. Кузьмин. Цифровая обработка радиолокационной информации. М.: Сов. Радио, 1967. 11. А.В. Фролов, Г.В. Фролов. Программирование видеоадаптеров. М.: Диалог -МИФИ, 1995. 12. А.И. Заковряшин. Конструирование РЭА с учетом особенностей эксплуатации. М.: Радио и связь, 1988. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Подвижная наземная двухкоординатная радиолокационная станция (РЛС) кругового обзора метрового диапазона волн, представляющая собой взаимосвязанный комплекс функциональных и конструктивных технических средств обеспечения потребительского уровня РЛС и включающая перестраиваемое в полосе частот приемопередающее устройство в составе твердотельного монопередатчика, двух формирователей зондирующих сигналов и приемника основного канала, основную антенну с датчиком угла ее поворота, устройство компенсации шумовых активных помех, включающее компенсационную антенну,приемник компенсационного канала и автокомпенсатор, устройство первичной обработки радиолокационных сигналов, состоящее из двух блоков обнаружения сигналов - дальней и ближней зон, коммутатора сигналов, блока подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны, блока пеленга постановщиков активных помех и блока измерения координат, устройство вторичной обработки радиолокационной информации и сопряжения, устройство отображения, управ-4 005898 ления и контроля, причем выходы двух формирователей зондирующих сигналов соединены с двумя входами твердотельного монопередатчика, выход которого соединен со входом основной антенны, первый выход которой соединен со входом приемника основного канала, выход которого соединен со входом блока пеленга постановщиков активных помех и с первым входом автокомпенсатора, второй, третий и четвертый входы которого соединены с тремя выходами приемника компенсационного канала, четыре входа которого соединены с четырьмя выходами компенсационной антенны, а пятый его вход соединен со вторым выходом основной антенны, выход автокомпенсатора через параллельно соединенные блоки обнаружения сигналов дальней и ближней зон соединен, соответственно, с первым и вторым входами коммутатора сигналов, выход которого соединен с входом блока подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны, выход которого соединен с первыми входами блока измерения координат и устройства отображения, управления и контроля, второй и третий входы которого соединены, соответственно, с первым выходом блока измерения координат и вторым выходом блока пеленга постановщиков активных помех, первый выход которого соединен со вторым входом блока измерения координат, второй выход которого соединен с входом устройства вторичной обработки радиолокационной информации и сопряжения, выход-вход которого соединен с входомвыходом устройства отображения, управления и контроля, при этом для размещения аппаратуры РЛС используется кабина транспортного средства, разделенная шумопоглощающей стенкой с дверью на обитаемый отсек с рабочим местом оператора, содержащим устройство отображения, управления и контроля и устройство вторичной обработки радиолокационной информации и сопряжения, и аппаратный отсек с аппаратным шкафом, содержащим приемопередающее устройство, устройство первичной обработки радиолокационных сигналов, приемник компенсационного канала и автокомпенсатор шумовых активных помех и конструктивно сопряженным с оснащенным холодильной установкой оборудованием приточно-вытяжного воздушного охлаждения, расположенным под днищем кабины и обеспечивающим охлаждение аппаратуры шкафа и вентиляцию обитаемого отсека кабины. 2. РЛС по п.1, в которой твердотельный монопередатчик содержит большое число, исчисляемое десятками и более усилителей мощности, выходы которых суммируются, при этом усилители мощности выполнены в виде герметичных модулей по тонкопленочной технологии на микрополосковых линиях. 3. РЛС по п.1, в которой компенсационная антенна является стационарной и содержит четыре излучателя, расположенные попарно под углом 90 в горизонтальной плоскости на двух мачтах, установленных по разные стороны основной антенны так, чтобы угол между всеми четырьмя излучателями в горизонтальной плоскости составлял 90.
МПК / Метки
МПК: G01S 13/72, G01S 7/36
Метки: станция, волн, радиолокационная, обзора, подвижная, диапазона, метрового, наземная, двухкоординатная, кругового
Код ссылки
<a href="https://eas.patents.su/7-5898-podvizhnaya-nazemnaya-dvuhkoordinatnaya-radiolokacionnaya-stanciya-krugovogo-obzora-metrovogo-diapazona-voln.html" rel="bookmark" title="База патентов Евразийского Союза">Подвижная наземная двухкоординатная радиолокационная станция кругового обзора метрового диапазона волн</a>
Устройство переднего обзора для автомобиля с нестандартным расположением руля
Номер патента: 1684
Опубликовано: 25.06.2001
Автор: Черданцев Олег Валерьевич
МПК: B60R 1/10
Метки: устройство, переднего, обзора, нестандартным, автомобиля, руля, расположением
Формула / Реферат:
1. Устройство переднего обзора автомобиля с нестандартным расположением руля, содержащее два зеркала, установленных в салоне автомобиля в полом жестком корпусе, с возможностью установки у верхней или нижней кромки лобового стекла для отражения передней части дороги в поле зрения водителя, отличающееся тем, что зеркала расположены параллельно друг другу для создания перископического эффекта, причем одно из зеркал расположено со стороны пассажира,...
Подвижная система для снятия цинка с катода
Номер патента: 5101
Опубликовано: 28.10.2004
Авторы: Босшер Ян, Асенсио Леопольд Эскобедо, Смит Барри Джон
МПК: C25C 7/08
Метки: подвижная, катода, цинка, снятия, система
Формула / Реферат:
1. Устройство для снятия цинковых листов с катодов, при этом устройство содержит подвижную основную раму для передвижения устройства по полу; опорную раму для катодов, соединенную с подвижной основной рамой, при этом опорная рама для катодов имеет размер, форму и расположение, обеспечивающие опору катодов во время снятия; снимающий узел для снятия цинковых листов с катодов, при этом снимающий узел соединен с возможностью перемещения с основной...
Источник антенны для передачи и приема волн сверх высокой частоты
Номер патента: 492
Опубликовано: 26.08.1999
Авторы: Крюшон Жан-Клод, Бло Жан-Пьер, Каммуни Алекси, Эстрад Жерар
МПК: H01P 1/16
Метки: антенны, приема, высокой, волн, источник, сверх, частоты, передачи
Формула / Реферат:
1. Источник антенны для передачи и приема волн сверхвысоких частот, содержащий преобразователь для разделения передаваемых и принимаемых сигналов с различными частотами, отличающийся тем, что преобразователь содержит волновод (26) с квадратным сечением, один конец которого соединен с излучающим элементом, другой конец которого соединен с каналом передачи, причем канал передачи содержит волновод с круговым сечением, который оканчивается внутри...
Радиолокационная установка и способ измерения для определения ориентации и глубины объекта, находящегося под землей
Номер патента: 2451
Опубликовано: 25.04.2002
Авторы: Йенсен Оле Киель, Грегерсен Оле
МПК: G01V 3/12, G01S 13/04
Метки: установка, определения, находящегося, радиолокационная, глубины, способ, ориентации, землей, объекта, измерения
Формула / Реферат:
1. Установка для генерирования информации, указывающей глубину и ориентацию объекта, расположенного под поверхностью земли, причем установка предназначена для использования электромагнитного излучения, излучаемого и принимаемого антенной системой, связанной с установкой и содержащей передатчик и приемник для генерирования электромагнитного излучения совместно с антенной системой и для приема электромагнитного излучения, отраженного от объекта,...
Устройство для плазменного надреза материи с помощью резонансного генератора электромагнитного поля высокочастотного диапазона
Номер патента: 3761
Опубликовано: 28.08.2003
Авторы: Фуго Ричард Дж., Коксио Дамиан
МПК: A61B 18/12
Метки: резонансного, плазменного, электромагнитного, надреза, поля, устройство, диапазона, материи, высокочастотного, помощью, генератора
Формула / Реферат:
1. Устройство для плазменного надреза материи, содержащее средство формирования высокочастотных электромагнитных колебаний, средство для подачи их к вершине режущего передающего электрода, средство для поддержания облака плазмы, окружающего вершину упомянутого электрода, созданного при возбуждении элементарных частиц вдоль границы раздела между вершиной режущего передающего электрода и надрезаемой материей. 2. Устройство по п.1, отличающееся...
Предыдущий патент: Получение сферических частиц из расплава полимера
Следующий патент: Устройство для измерения/определения физической величины среды
Случайный патент: Способ получения ингибиторов фосфодиэстеразы iv