Способ торможения механической лебёдки и коробка передач для его реализации
Номер патента: 2533
Опубликовано: 27.06.2002
Авторы: Миронов Владимир Иванович, Парамонов Виктор Алексеевич, Полторацкий Борис Фёдорович, Козишкурт Валерий Иосифович
Формула / Реферат
1. Способ торможения механической лебедки, включающий в себя последовательное переключение силовых цепей коробки передач лебедки в сторону низшей ступени, которая соответствует максимальному замедляющему действию передаточных механизмов, отличающийся тем, что торможение от низшей ступени передач до полной остановки производится введением в действие голономного переменного передаточного механизма так, что его ведомое тело соединяется с валом лебедки, ведущее тело - с гидравлическим тормозом, а опорное - с корпусом.
2. Способ по п.1, отличающийся тем, что точное регулирование фазы остановки механической лебедки производится путем регулирования положения опорного тела переменного передаточного механизма с помощью дополнительного мотора, включенного через редуктор между корпусом и опорным телом переменного передаточного механизма.
3. Коробка передач механической лебедки, содержащая источник крутящего момента и расположенные в корпусе, по крайней мере, два вала, входной и выходной, подключенные входами к входному валу силовые цепи, которые состоят из систем шестеренчатых пар и синхронизированных муфт сцепления и которые пронумерованы согласно порядковому номеру соответствующей передачи, а также голономный переменный передаточный механизм, ведомое тело которого связано с выходным валом, его первое ведущее тело имеет связи с силовыми цепями только нечётных передач, а второе ведущее тело имеет связи только с силовыми цепями чётных передач и одну связь с корпусом, отличающаяся тем, что содержит гидравлический тормоз, подключённый к входному валу, входной синхронизатор, включённый между источником крутящего момента и входным валом, а также дополнительный синхронизатор, включённый в связь второго ведущего тела переменного передаточного механизма с корпусом.
4. Коробка передач по п.1, отличающаяся тем, что содержит механизм регулирования начального положения выходного вала, включающий в себя дополнительный мотор и редуктор, включённые последовательно между вторым дополнительным синхронизатором и корпусом.
5. Коробка передач по п.1, отличающаяся тем, что гидравлический тормоз соединён с входным валом через дополнительную обгонную муфту.
6. Коробка передач по п.1, отличающаяся тем, что содержит выходной переключатель, и также механизм демультипликации и реверса, подключённые так, что вход выходного переключателя соединён с выходным валом коробки передач, его первый выход - с валом механической лебедки, а второй выход - с входом механизма демультипликации и реверса, выход которого соединён с транспортным выходным валом.

Текст
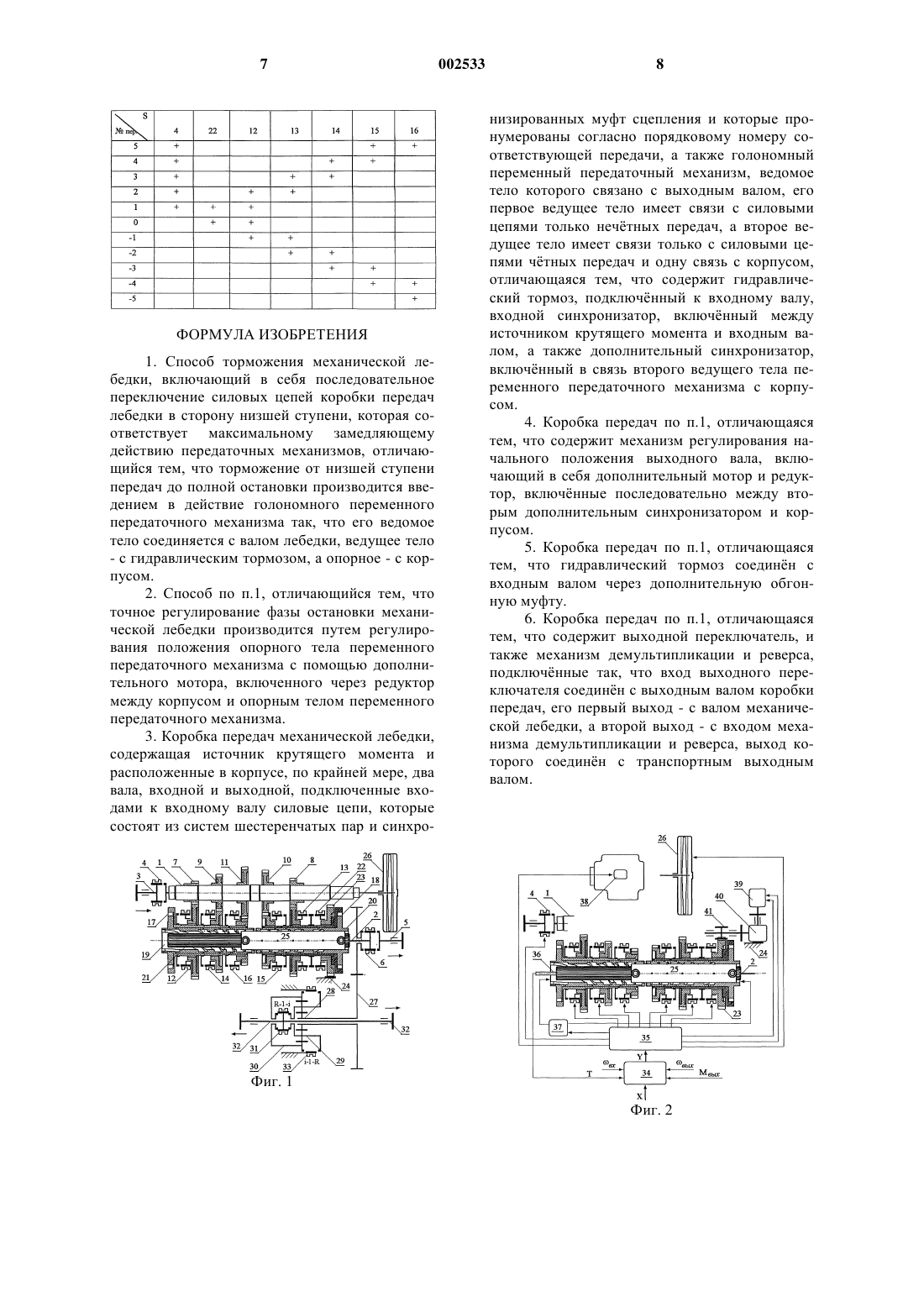
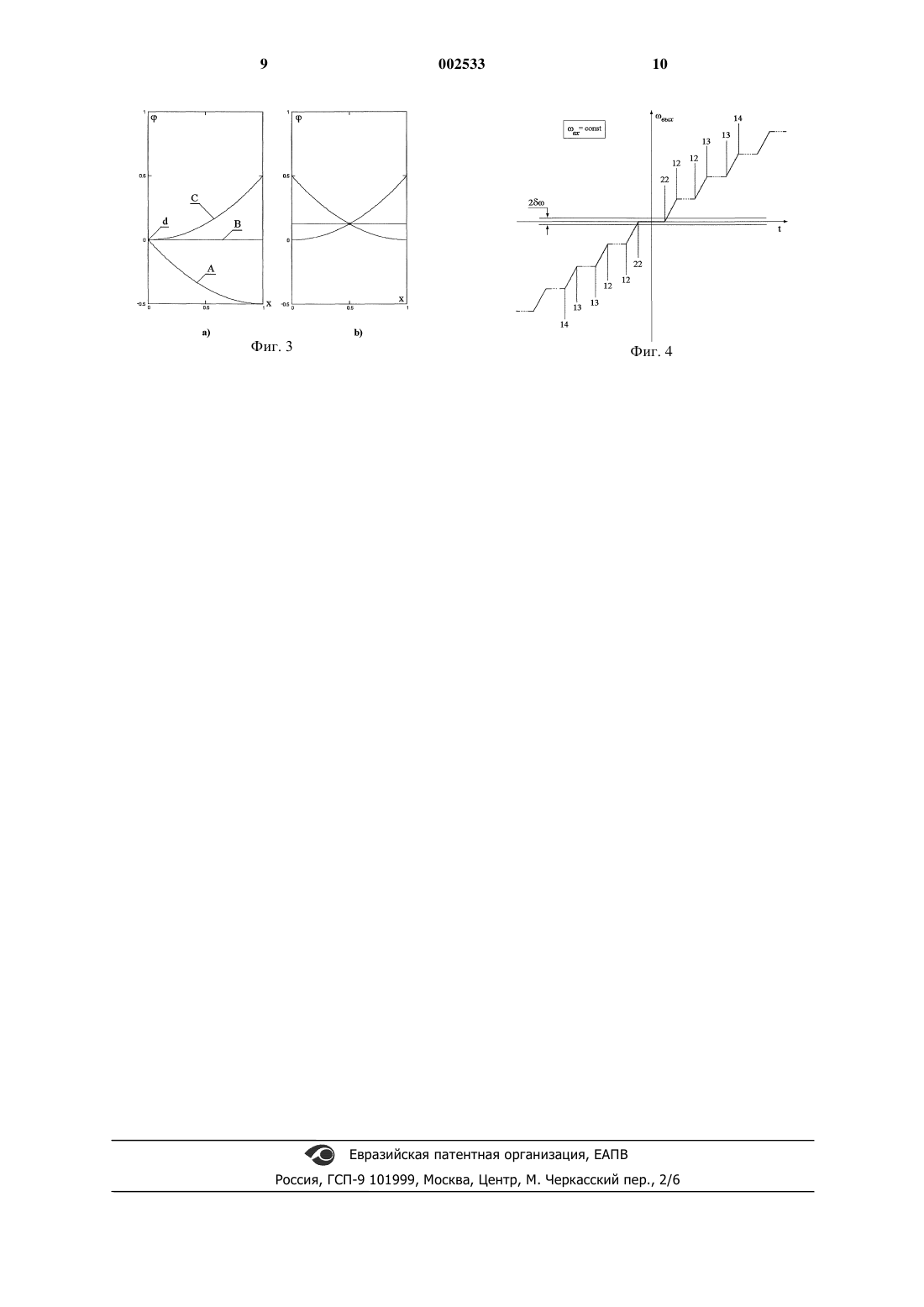
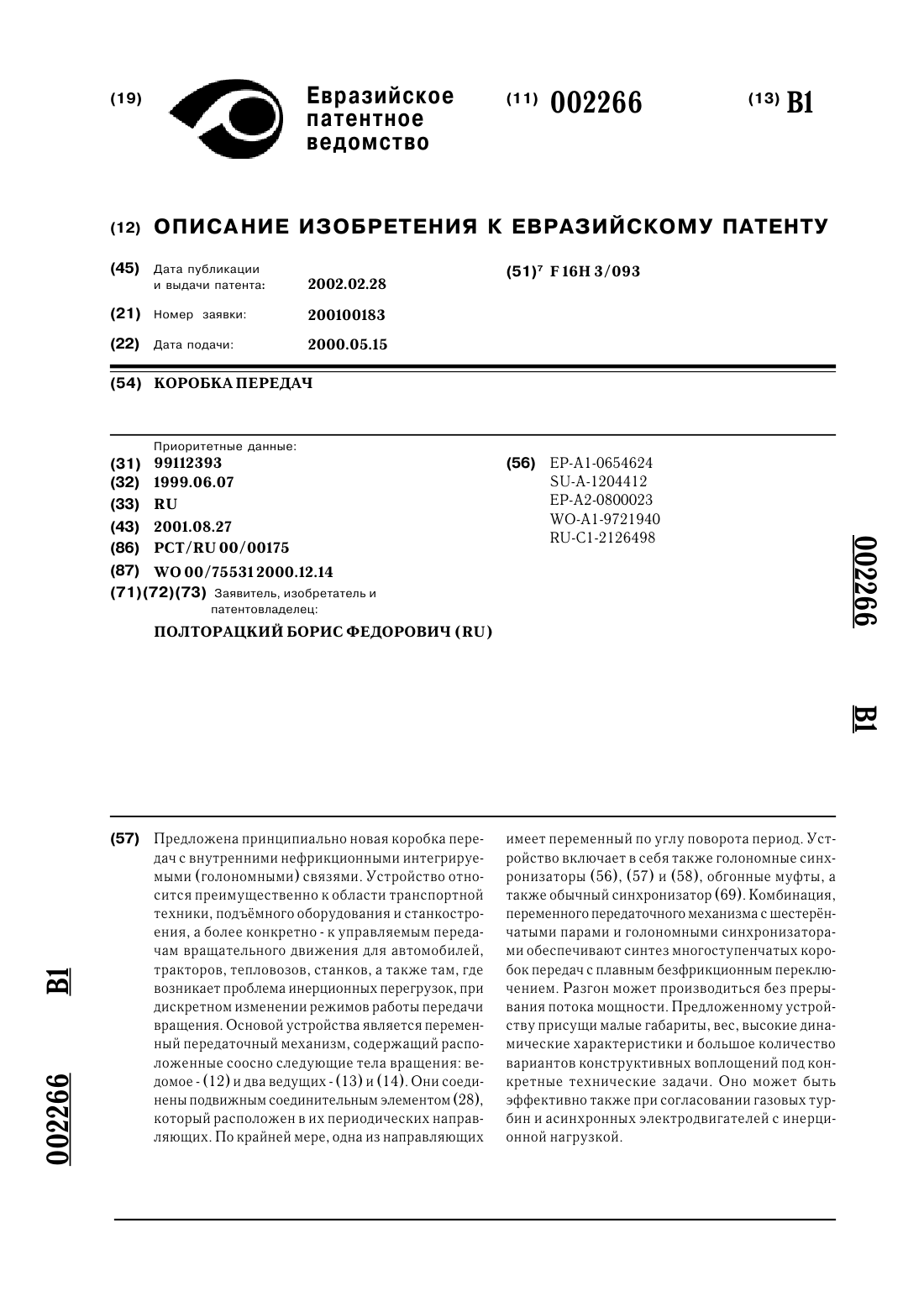
1 Предложение относится преимущественно к области подъемной и буровой техники, а более конкретно, к мобильным установкам для ремонта нефтяных и газовых скважин. Оно может быть использовано также в других механизмах, где возникает проблема инерционных перегрузок при дискретном изменении режимов работы передачи вращения, например в трансмиссиях для автомобилей, тракторов, тепловозов, станков и т.д. Известны механические лебедки в составе бурового оборудования, в которых для плавного опускания грузов: металлических конструкций,обсадных труб и т.д., применяются регулируемые гидравлические тормозные системы (см.,например, А.Л. Ильинский и др. Расчет и конструирование бурового оборудования, М., 1985 г.,4, стр. 279). Поскольку гидротормоз не может довести операцию до полной остановки, на заключительной стадии торможения в этих системах применяются фрикционные тормоза. Однако все фрикционы нестабильны и поэтому осложняют автоматизацию процесса управления, который в оптимальном варианте должен быть сведен к манипуляции одним легко передвигаемым рычагом (джойстиком). Ближайшим прототипом предложенному способу является последовательность операций,производимых с применением различных тормозных систем при опускании грузов механическими лебедками, описанная в книге Н.А. Северинчик Машины и оборудование для бурения скважин, М., 1986 г.,2, стр. 278. Этот известный способ торможения механической лебедки включает в себя последовательное переключение силовых цепей коробки передач лебедки в сторону низшей ступени, которая соответствует максимальному замедляющему действию передаточных механизмов. Ближайшим прототипом предложенному устройству является коробка передач по заявкеPCT/RU 00/00175 от 07.06.99. Она содержит источник крутящего момента и расположенные в корпусе, по крайней мере, два вала, входной и выходной, подключенные входами к входному валу силовые цепи, которые состоят из систем шестеренчатых пар и синхронизированных муфт сцепления и которые пронумерованы согласно порядковому номеру соответствующей передачи, а также голономный переменный передаточный механизм, ведомое тело которого связано с выходным валом, его первое ведущее тело имеет связи с силовыми цепями только нечетных передач, а второе ведущее тело имеет связи только с силовыми цепями четных передач и одну связь с корпусом. Целью данного предложения является расширение функциональных возможностей механической лебедки за счет облегчения процесса управления торможением. Поставленная цель достигается тем, что торможение от низшей ступени передач до пол 002533 2 ной остановки производится введением в действие голономного переменного передаточного механизма так, что его ведомое тело соединяется с валом лебедки, ведущее тело - с гидравлическим тормозом, а опорное - с корпусом. Точное регулирование фазы остановки механической лебедки может производится путем регулирования положения опорного тела переменного передаточного механизма с помощью дополнительного мотора, включенного через редуктор между корпусом и опорным телом переменного передаточного механизма. Поставленная цель достигается также тем,что коробка передач механической лебедки содержит гидравлический тормоз, подключенный к входному валу, входной синхронизатор,включенный между источником крутящего момента и входным валом, а также дополнительный синхронизатор, включенный в связь второго ведущего тела переменного передаточного механизма с корпусом. Коробка передач может содержать механизм регулирования начального положения выходного вала, включающий в себя дополнительный мотор и редуктор, включенные последовательно между вторым дополнительным синхронизатором и корпусом. Гидравлический тормоз может быть соединен с входным валом через дополнительную обгонную муфту. Коробка передач может содержать выходной переключатель, а также механизм демультипликации и реверса, подключенные так, что вход выходного переключателя соединен с выходным валом коробки передач, его первый выход - с валом механической лебедки, а второй выход - с входом механизма демультипликации и реверса, выход которого соединен с транспортным выходным валом. На фиг. 1 представлена схема предложенной коробки передач для механической лебедки. На фиг. 2 представлена схема основных цепей управления коробки передач и управления двигателем для механической лебедки по схеме фиг. 1. На фиг. 3-а,b в виде плоской развертки представлены варианты взаимного расположения направляющих в переменном передаточном механизме для коробки передач по схеме фиг. 1. На фиг. 4 представлен график переключения синхронизаторов в коробке передач для механической лебедки по схеме фиг. 1. Предложенная коробка передач, схема которой представлена на фиг. 1, содержит входной вал 1 и выходной вал 2. Входной вал 1 соединен с источником крутящего момента 3 через входной синхронизатор 4. Выходной вал 2 соединен с валом лебедки 5 через выходной переключатель 6. Входной вал 1 соединен также через шестеренки 7, 8, 9, 10, 11, синхронизаторы 12,13, 14, 15, 16 и обгонные муфты 17, 18 с ведущими телами вращения 19 и 20 переменного 3 передаточного механизма. Ведомое тело 21 переменного передаточного механизма связано с выходным валом 2. Ведущее тело 20 через дополнительный синхронизатор 22 и дополнительное опорное тело 23 соединено с корпусом 24. Тела вращения 19, 20, 21 переменного передаточного механизма связаны между собой через подвижный соединительный элемент 25. Гидравлический тормоз 26 соединен с входным валом 1. Второй выход выходного переключателя 6 соединен через шестеренчатую пару 27 с механизмом демультипликации и реверса, выполненным на основе планетарной передачи, у которой внутренняя шестерня 28 соединена с парой 27, а система сателлитов 29 и внешняя шестерня 30 связаны через нормально замкнутый синхронизированный переключатель 31 с транспортным выходным валом 32. Кроме того,система сателлитов 29 и внешняя шестерня 30 соединены через нормально разомкнутый синхронизированный переключатель 33 с корпусом. Положения синхронизированных переключателей здесь обозначены так: i - соответствует режиму демультипликации с коэффициентом i,l - прямая передача (без замедления), R - реверс. Схема основных цепей управления коробки передач и управления двигателем для механической лебедки, представленная на фиг. 2,включает в себя последовательно соединенные процессорный блок управления 34 и систему аналоговых преобразователей сигналов управления 35. Процессорный блок управления 34 имеет следующие сигнальные входы: входы данных от измерителей частоты вращения входного 1 и выходного 2 валов - вх и вых соответственно, вход данных от измерителя выходного момента - Мвых, вход данных о положении Т подвижного соединительного элемента 22 в голономном переменном передаточном механизме, задаваемых датчиком 36, а также вход команд управления - X, которые поступают от оператора. Выходы системы аналоговых преобразователей сигналов управления 35 соединены непосредственно со всеми синхронизаторами,включая входной 4, с устройством установки исходного положения подвижного соединительного элемента 37, с органом управления двигателем 38 и с гидравлическим тормозом 26. К входу 35 подключен также вспомогательный мотор 39 точной регулировки фазы выходного вала, который вместе с редуктором 40 через шестерню 41 включен между корпусом 21 и дополнительным опорным телом 23. На фиг. 3-а,b в координатах (х, ), где х относительное продольное смещение соединительного элемента от исходного положения, аугол поворота ведущего тела в относительных единицах, графически представлены положения направляющих в переменном передаточном механизме. Здесь на графике фиг. 3 а А - положение направляющей 1-го ведущего тела, В - по 002533 4 ложение направляющей 2-го ведущего тела, С положение направляющей ведомого тела и d положение подвижного соединительного элемента в исходном состоянии механизма. На графике фиг. 3b представлены положения тех же элементов в середине рабочего цикла. На фиг. 4 в координатах (вых, t), где вых скорость вращения выходного вала, a t - обобщенная фаза или время, представлен график изменения выходной скорости при переключении соответствующих синхронизаторов - 22,12 14. Стационарные состояния системы обозначены горизонтальными линиями, соответствующими постоянной выходной скорости. Наклонные участки графика означают переходной процесс. Точечной штриховкой обозначены включенные состояния одновременно двух передач (обозначенных слева и справа) во время переходного процесса. Условно считается, что верхняя правая половина графика соответствует включенному состоянию синхронизатора 4, а нижняя левая - его выключенному состоянию. Диапазон производных от фазы, добавляемой дополнительным мотором 39 (см. фиг. 2), обозначен величиной 2. Коробка передач по схеме фиг. 1 в режиме лебедки работает следующим образом. Перед стартом синхронизаторы 4, 13 16 находятся в разомкнутом состоянии. Дополнительный синхронизатор 22 замкнут. Состояние синхронизатора 12 сейчас принципиального значения не имеет. Выходной переключатель 6 находится в состоянии соединения выходного вала с валом лебедки 5. Входной вал 1 отключен от источника крутящего момента 3 (например, двигателя). Нагрузка на вал лебедки 5 приложена к корпусу 24 через выходной вал 2, подвижный соединительный элемент 25, второе ведущее тело 20,обгонную муфту 18, дополнительный синхронизатор 22 и дополнительное опорное тело 23. Эта же нагрузка удерживает соединительный элемент 25 в крайне правом положении. В таком состоянии лебедка может удерживать груз неограниченно долго. На графике фиг. 4 эта ситуация характеризуется горизонтальным участком ломаной кривой в начале координат. Переход коробки передач к подъему груза с первой скоростью начинается после включения синхронизаторов 4 и 12 (см. таблицу) при замкнутом синхронизаторе 22. На графике фиг. 4 эта ситуация характеризуется первым нарастающим участком ломаной кривой в правой части графика. Теперь переменный передаточный механизм плавно входит в процесс переключения,который начинается с вращения ведущего тела 19 в сторону увеличения угла(см. фиг. 1 и 3). Крутящий момент, который приложен к обгонной муфте 17, и реактивный крутящий момент,который приложен к обгонной муфте 18 и далее через цепь элементов 22 и 23 к корпусу 24,имеют одинаковое направление. Оно для обеих 5 обгонных муфт является основным рабочим, и обгонные муфты находятся в замкнутом состоянии. Винтовая направляющая А (см. фиг. 3) вытесняет соединительный элемент 25 вдоль общей оси и соответственно вдоль неподвижной направляющей С второго ведущего тела 20. При этом соединительный элемент 25, перемещаясь в винтовой направляющей тела 20, вращает ведомое тело 21 с направляющей В. Так реализуется основное свойство переменного передаточного механизма: передаточное отношение Z=l/i плавно изменяется от 0 до 1. В конце цикла реактивный крутящий момент меняет знак, и обгонная муфта 18 разрывает связь с корпусом 24. Коробка передач переходит в стационарное состояние работы на первой передаче. Теперь лебедка поднимает груз с постоянной первой скоростью. На графике фиг. 4 эта ситуация характеризуется вторым по расстоянию от начала координат горизонтальным участком ломаной кривой в правой части графика. Переход коробки передач к подъему груза со второй скоростью начинается после включения синхронизатора 13 (см. таблицу) при замкнутых синхронизаторах 4 и 12. Синхронизатор 22 разомкнут. На графике фиг. 4 эта ситуация характеризуется вторым нарастающим участком ломаной кривой в правой части графика. Идет процесс переключения переменного передаточного механизма. При этом его тела вращения 19 и 20 функционально меняются местами, опорную функцию теперь выполняет тело 19, которое в отличие от начала работы первой ступени теперь не стоит на месте, а равномерно вращается со скоростью первой ступени. В конце этого переходного процесса реактивный момент,который прилагался к обгонной муфте 17, становится равным 0, и обгонная муфта 17 размыкается. Теперь коробка передач может неограниченно долго работать на второй скорости. Все дальнейшие переключения лебедки в сторону увеличения скорости подъема производятся аналогично и согласно таблице и фиг. 4. Однако максимальная скорость подъема зависит от отношения величины выходного крутящего момента Мвых к мощности двигателя. Поэтому право оператора на решение о переходе на следующую ступень ограничено аналитическим блоком 34 системы управления лебедки, представленной на фиг. 2. Все переключения лебедки в сторону уменьшения скорости подъема производятся коммутацией синхронизаторов в обратном порядке. Принципиальная разница в протекании процессов определяется только тем, что теперь переключения переменного передаточного механизма происходят не за счет мощности двигателя, а под действием веса груза. Например, для перехода со второй передачи на первую достаточно при включенных синхронизаторах 4 и 12 разомкнуть синхронизатор 13, а для перехода из состояния покоя к спуску на первой скорости 6 достаточно при включенном синхронизаторе 12 разомкнуть синхронизатор 22 и т.д. Переключения лебедки в сторону уменьшения скорости спуска производятся аналогично переключениям при подъеме согласно таблице и фиг. 4. Разница только в том, что при спуске всегда разомкнут синхронизатор 4. Например, для перехода со второй передачи на первую достаточно при включенном синхронизаторе 13 замкнуть синхронизатор 12, а для перехода от спуска на первой скорости к состоянию покоя достаточно при включенном синхронизаторе 12 замкнуть синхронизатор 22 и т.д. В этих режимах переменный передаточный механизм работает так же, как и при увеличении скорости подъема, т.к. все моменты на его компонентах имеют такое же направление. Теперь при каждом переключении опорой является предыдущая более высокая передача, связанная с гидравлическим тормозом 26 (см. фиг. 1 и 2). Поэтому при спуске он всегда должен быть введен в действие путем регулирования его характеристик (например, положением заслонок) согласно схеме фиг. 2 или подключаться самостоятельно, если между гидравлическим тормозом 26 и входным валом 1 установлена обгонная муфта. В транспортном режиме данная коробка передач работает аналогично варианту лебедки при подъеме груза. Для обеспечения этого режима выходной переключатель 6 переводится в левое по схеме фиг. 1 положение. При этом выходной вал 2 коробки передач через шестеренчатую пару 27 соединяется с ведущей шестерней 28 планетарного демультипликатора. Последовательность управления элементами демультипликатора та же, что и в обычном транспортном средстве. На фиг. 1 показано положение его синхронизаторов при движении вперед с передаточным отношением демультипликатора,равным 1. Включение промежуточной передачи из нейтрального положения в транспортном режиме обеспечивается системой управления (см. фиг. 2), которая может манипулировать механизмом установки начального положения подвижного соединительного элемента 25 на основании показаний датчика положения подвижного соединительного элемента 36. Таким образом, предложенные способ и коробка передач для его реализации способны без прерывания силового потока плавно переключать передачи как в режиме механической лебедки, включая переход от спуска груза до полной его остановки, так и в транспортном режиме, что существенно расширяет функциональные возможности устройства. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ торможения механической лебедки, включающий в себя последовательное переключение силовых цепей коробки передач лебедки в сторону низшей ступени, которая соответствует максимальному замедляющему действию передаточных механизмов, отличающийся тем, что торможение от низшей ступени передач до полной остановки производится введением в действие голономного переменного передаточного механизма так, что его ведомое тело соединяется с валом лебедки, ведущее тело- с гидравлическим тормозом, а опорное - с корпусом. 2. Способ по п.1, отличающийся тем, что точное регулирование фазы остановки механической лебедки производится путем регулирования положения опорного тела переменного передаточного механизма с помощью дополнительного мотора, включенного через редуктор между корпусом и опорным телом переменного передаточного механизма. 3. Коробка передач механической лебедки,содержащая источник крутящего момента и расположенные в корпусе, по крайней мере, два вала, входной и выходной, подключенные входами к входному валу силовые цепи, которые состоят из систем шестеренчатых пар и синхро 002533 8 низированных муфт сцепления и которые пронумерованы согласно порядковому номеру соответствующей передачи, а также голономный переменный передаточный механизм, ведомое тело которого связано с выходным валом, его первое ведущее тело имеет связи с силовыми цепями только нечтных передач, а второе ведущее тело имеет связи только с силовыми цепями чтных передач и одну связь с корпусом,отличающаяся тем, что содержит гидравлический тормоз, подключнный к входному валу,входной синхронизатор, включнный между источником крутящего момента и входным валом, а также дополнительный синхронизатор,включнный в связь второго ведущего тела переменного передаточного механизма с корпусом. 4. Коробка передач по п.1, отличающаяся тем, что содержит механизм регулирования начального положения выходного вала, включающий в себя дополнительный мотор и редуктор, включнные последовательно между вторым дополнительным синхронизатором и корпусом. 5. Коробка передач по п.1, отличающаяся тем, что гидравлический тормоз соединн с входным валом через дополнительную обгонную муфту. 6. Коробка передач по п.1, отличающаяся тем, что содержит выходной переключатель, и также механизм демультипликации и реверса,подключнные так, что вход выходного переключателя соединн с выходным валом коробки передач, его первый выход - с валом механической лебедки, а второй выход - с входом механизма демультипликации и реверса, выход которого соединн с транспортным выходным валом.
МПК / Метки
МПК: F16H 3/093, B66D 5/00
Метки: лебёдки, реализации, передач, коробка, торможения, механической, способ
Код ссылки
<a href="https://eas.patents.su/6-2533-sposob-tormozheniya-mehanicheskojj-lebyodki-i-korobka-peredach-dlya-ego-realizacii.html" rel="bookmark" title="База патентов Евразийского Союза">Способ торможения механической лебёдки и коробка передач для его реализации</a>
Коробка передач
Номер патента: 2266
Опубликовано: 28.02.2002
Автор: Полторацкий Борис Фёдорович
МПК: F16H 3/093
Формула / Реферат:
1. Коробка передач, содержащая расположенные в корпусе, по крайней мере, два вала, входной и выходной, и подключённые входами к входному валу силовые цепи, которые состоят из систем шестерёнчатых пар и синхронизированных муфт сцепления, и которые пронумерованы согласно порядковому номеру соответствующей передачи, а также систему управления, включающую в себя механизм управления синхронизированными муфтами сцепления, отличающаяся тем, что...
Способ механической обработки ствола дерева
Номер патента: 124
Опубликовано: 27.08.1998
Автор: Раутио Кауко
МПК: B27B 1/00
Метки: ствола, обработки, дерева, способ, механической
Формула / Реферат:
1. Способ механической обработки стволов дерева на станке для получения таких пиломатериалов, как доски и четырехгранные брусья, отличающийся тем, что от ствола (1), предпочтительно обтесанного, по меньшей мере, с двух боковых сторон, отпиливают, по меньшей мере, одну боковую доску (3) таким образом, чтобы, по меньшей мере, часть тупой кромки (2) оставалась на боковой доске (3), после чего обрезают тупые кромки (2') боковой доски; боковая доска...
Система торможения для персональных скоростных перевозок
Номер патента: 133
Опубликовано: 29.10.1998
Автор: Ким Ин Ки
Метки: персональных, система, торможения, скоростных, перевозок
Формула / Реферат:
1. Система торможения для персональных скоростных перевозок, снабженных направляющей (100), расположенной вдоль заданного пути, и средствами передвижения, установленными для передвижения вдоль направляющей (100), отличающаяся тем, что эта система торможения содержит: взаимодействующие с тормозом рельсы (120), установленные в одну линию вдоль каждой из внутренних стенок направляющей (100) и непрерывно вдоль стенок стрелочных участков...
Пластмассовая распределительная коробка с блоками розеток
Номер патента: 289
Опубликовано: 25.02.1999
Автор: Шилхэм Ян Л.
МПК: H02G 3/18
Метки: блоками, розеток, пластмассовая, коробка, распределительная
Формула / Реферат:
1. Распределительная коробка (38) для использования с системой подвесного перекрытия, имеющей подпорки для поддержания панелей перекрытия, содержащая(a) корпус (40), имеющий множество боковых стенок (62), соединенных с образованием замкнутого периметра и дна;(b) по меньшей мере, один блок розеток (46) для размещения выводов, причем блок розеток (46) прикреплен, по меньшей мере, к одной боковой стенке; и(c) направляющие (58), выполненные на...
Способ и система для механической сортировки различных материалов (веществ) из отработавших измельчаемых люминесцентных ламп и аналогичных ламп.
Номер патента: 128
Опубликовано: 27.08.1998
Авторы: Монссон Ханс-Эрик, Сундберг Кристер
МПК: B07B 9/00
Метки: аналогичных, люминесцентных, способ, измельчаемых, сортировки, механической, система, материалов, веществ, ламп, отработавших, различных
Формула / Реферат:
1. Способ для механической сортировки различных материалов/веществ из отработавших люминесцентных ламп и аналогичных измельчаемых газоразрядных ламп низкого давления, отличающийся тем, что а) отработавшие люминесцентные лампы подают в дробилку, где их измельчают на осколки материала, которые потоком воздуха подают в первую сортировочную колонну, где более крупные осколки материала из стекла и металла отделяют от потока воздуха и выводят из...
Предыдущий патент: Устройство из трубопровода и футерующего его рукава и способ изготовления этого устройства
Следующий патент: Устройство для лечения дегенерации желтого пятна
Случайный патент: Способ переработки руд на основе сульфида меди