Машина транспортная с краном-манипулятором и платформой
Номер патента: 15950
Опубликовано: 30.12.2011
Авторы: Силутин Андрей Петрович, Зайцев Геннадий Анатольевич, Полховский Владимир Васильевич, Шевелев Виктор Александрович, Тарасевич Владимир Владимирович, Пейсаров Валерий Нисанович, Шлыков Андрей Михайлович, Кондрашов Николай Григорьевич, Кондуков Сергей Викторович, Шамеков Виктор Николаевич, Борейко Николай Васильевич, Миранков Юрий Михайлович, Кутепов Юрий Александрович, Федосов Виталий Владимирович
Формула / Реферат
1. Машина транспортная с краном-манипулятором и платформой, содержащая кабину, ходовой двигатель, устройство рулевого управления и шасси шарнирно-сочлененной конструкции из передней и задней рам, выполненных в виде сварных конструкций из продольных балок, соединенных поперечинами, при этом на передней раме установлены кабина с рулевым колесом, ходовой двигатель с гидромеханической передачей и передний ведущий мост, на задней раме установлен задний ведущий мост, две выносные опоры, грузовая платформа с откидными бортами и поворотный кран-манипулятор со складывающейся выдвижной стрелой, установленный со смещением относительно продольной оси рамы на 0,063±0,0025 расстояния между осями переднего и заднего мостов, рамы соединены между собой верхними и нижними шарнирами, расположенными соосно один над другим, гидромеханическая передача связана с передним мостом одним карданным валом, а с задним мостом - двумя последовательно связанными карданными валами, при этом насос-дозатор подключен к насосу питания и к двум гидроцилиндрам поворота машины через шестилинейный и трехлинейный распределители, причем последний соединен через шаровой кран с шестисекционным распределителем, секции которого выполнены в виде пятилинейных распределителей и подключены параллельно к гидромотору поворота крана-манипулятора, гидроцилиндру наклона стрелы, гидроцилиндру складывания стрелы, двум соединенным одноименными поршневыми и штоковыми полостями гидроцилиндрам выдвижения стрелы и к двум гидроцилиндрам выносных опор.
2. Машина по п.1, отличающаяся тем, что ее колеса выполнены односкатными, а шины - пневматическими камерными с карьерным рисунком протектора.
3. Машина по любому из пп.1, 2, отличающаяся тем, что ее платформа выполнена выступающей за свободный край задней рамы.
4. Машина по любому из пп.1, 2, отличающаяся тем, что для наружного освещения и сигнализации установлены фары, габаритные фонари, сигналы торможения.

Текст
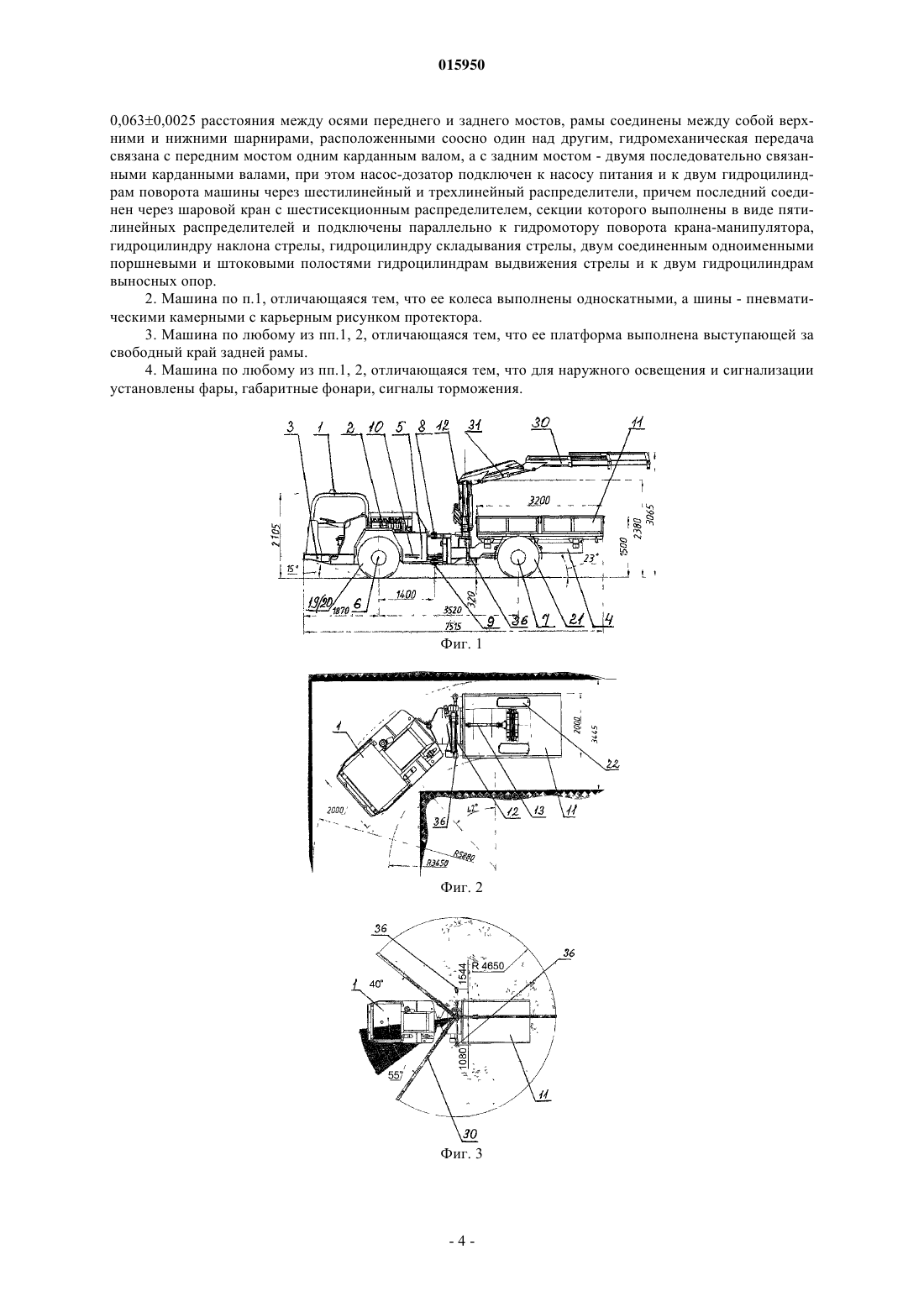
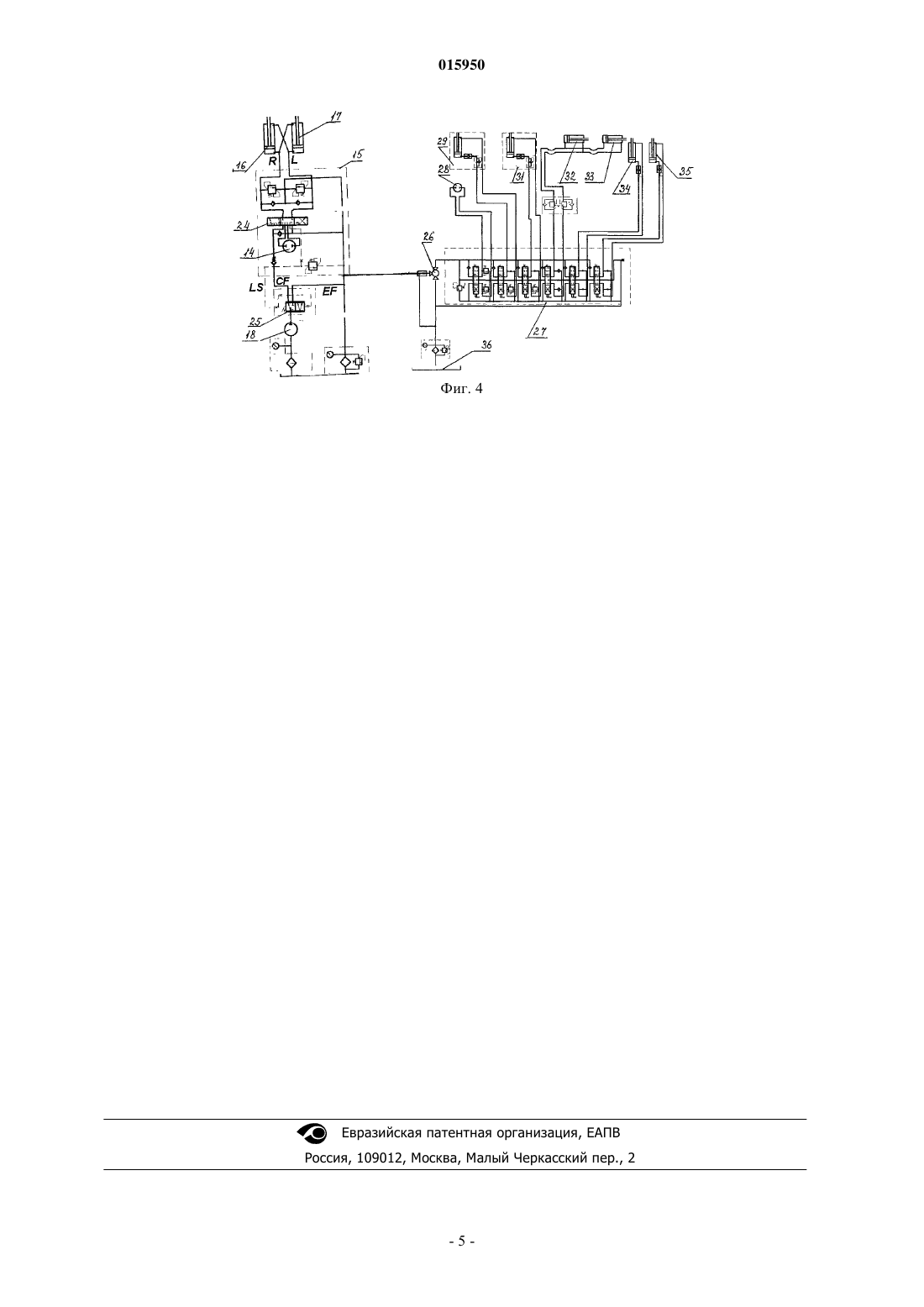
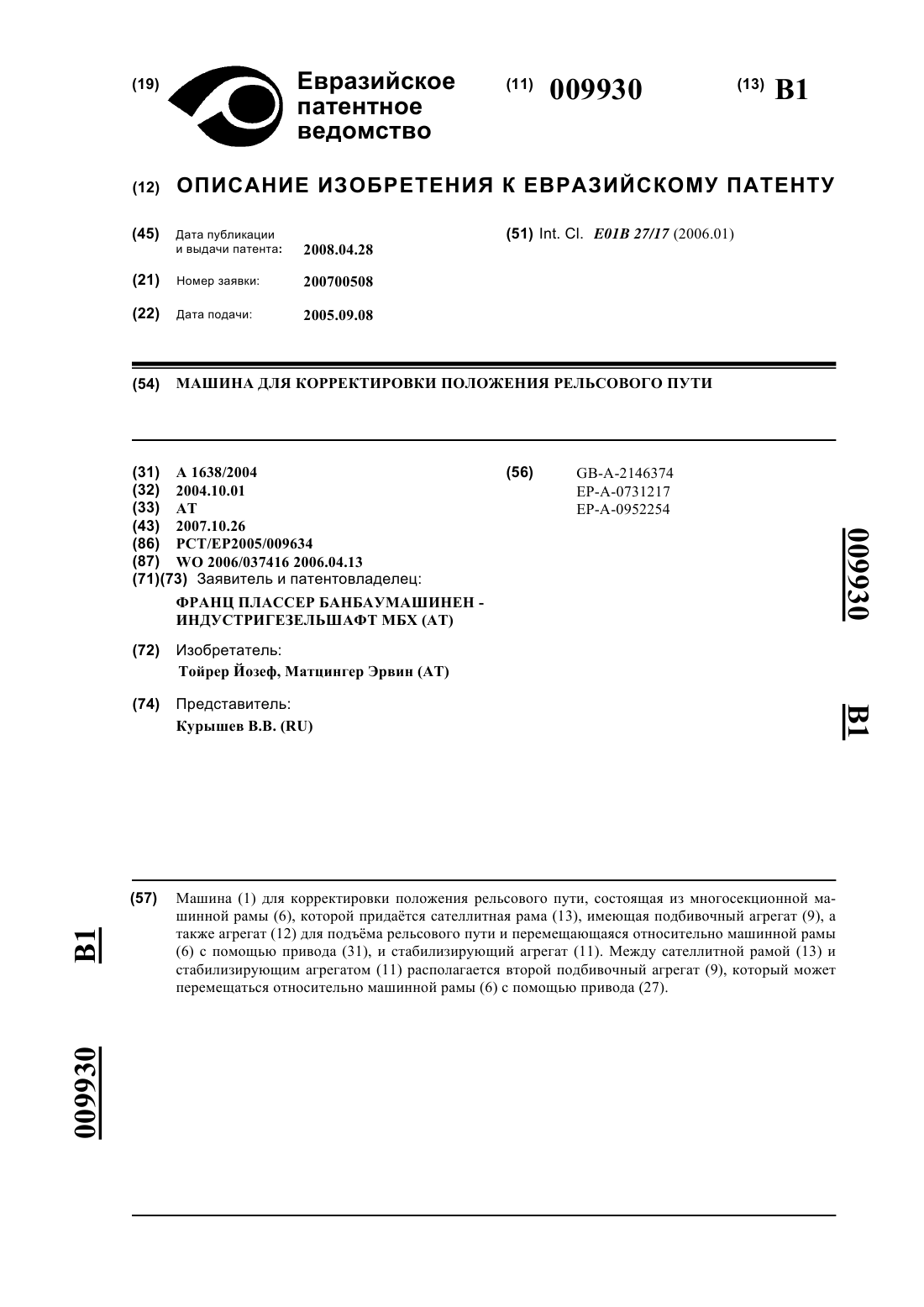
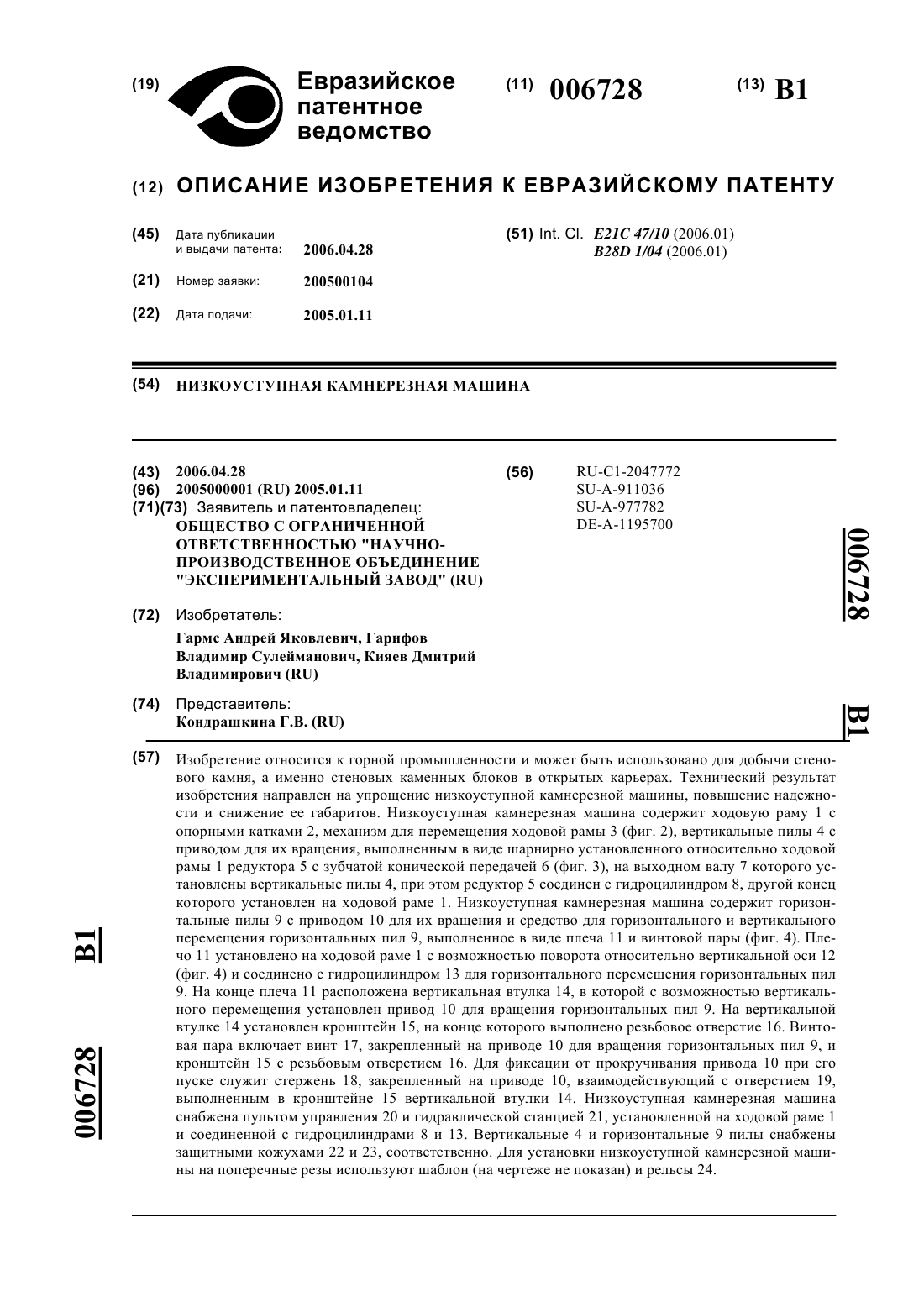
Дата публикации и выдачи патента Номер заявки Пейсаров Валерий Нисанович (RU),Зайцев Геннадий Анатольевич,Кондуков Сергей Викторович,Шевелев Виктор Александрович,Кутепов Юрий Александрович,Кондрашов Николай Григорьевич,Машина транспортная с краном-манипулятором и платформой содержит кабину 1, ходовой двигатель 2 и шасси из передней рамы 3 и задней рамы 4. На передней раме 3 установлены кабина 1 с рулевым колесом, а за ней - двигатель 2 с гидромеханической передачей 5 и передний ведущий мост 6. На задней раме 4 установлен задний ведущий мост 7, грузовая платформа 11 и кран-манипулятор 12. Рамы 3, 4 соединены между собой шарнирами 8, 9. Двигатель 2 связан с мостом 6 карданным валом 10, а с задним мостом 7 - карданными валами 13. Кранманипулятор 12 выполнен со складывающейся выдвижной стрелой 30 и установлен со смещением вправо относительно оси рамы 4 на 0,0630,0025 расстояния между осями мостов 6, 7. Насосдозатор 14 подключен к насосу 18 питания и к двум гидроцилиндрам 16, 17 поворота машины через распределители 24, 25, причем последний соединен через кран 26 с распределителем 27, подключенным к гидромотору 28 поворота крана-манипулятора 12, гидроцилиндру 29 наклона стрелы 30, гидроцилиндру 31 складывания стрелы 30, двум соединенным полостями гидроцилиндрам 32, 33 выдвижения стрелы 30 и к гидроцилиндрам 34 выносных опор 35. При этом обеспечено расширение функциональных возможностей для безопасного и эффективного транспортирования и погрузочно-разгрузочных работ с помощью одного агрегата с одним ходовым двигателем, расширены диапазоны углов поворота стрелы крана-манипулятора, а также передней рамы относительно задней рамы, увеличена допустимая грузоподъемность и допустимый угол наклона машины при движении и стоянке, повышены безопасность, долговечность, надежность и устойчивость, расширены возможности маневрирования. 015950 Изобретение относится к области подъемно-транспортного машиностроения. Машина транспортная с краном-манипулятором и платформой (МТКП) - машина специальной конструкции, предназначена для погрузки, разгрузки и перевозки грузов, применяемых на вспомогательных работах при добыче полезных ископаемых в условиях подземных шахт и проходок, не опасных по пыли и газу. Машина предназначена для эксплуатации вне дорог общего пользования, в основном в подземных условиях, исключающих наличие отрицательных температур окружающего воздуха. Известна машина транспортная с краном-манипулятором, содержащая кабину, ходовой двигатель,устройство рулевого управления и шасси, поворотный кран-манипулятор с телескопической стрелой (SU256706). Недостатками данной машины транспортной с краном-манипулятором являются плохая маневренность из-за нецелесообразной компоновки оборудования на раме и распределения нагрузок, допускающего при повороте перегрузку узла сочленения рам и опрокидывание, незначительный угол подъема,преодолеваемый машиной, узость функциональных возможностей, низкая приспособленность для работы в стесненных условиях подземных шахт и проходок. Известна машина транспортная с краном-манипулятором, содержащая кабину, ходовой двигатель,устройство рулевого управления и шасси, гидросистему с насосом и распределительным устройством,поворотный кран-манипулятор со складной телескопической стрелой (SU1259027, прототип). Недостатками данной машины являются плохая маневренность из-за неоптимальных компоновки и распределения нагрузок, ограничивающие угол подъема, преодолеваемого машиной, и допустимый радиус поворота и угол наклона машины без опрокидывания при движении и стоянке, узость функциональных возможностей в части управления машиной и маневрирования в стесненных условиях подземных шахт. Технической задачей изобретения является создание эффективной машины транспортной с краномманипулятором и платформой, а также расширение арсенала машин транспортных с краномманипулятором и платформой. Технический результат, обеспечивающий решение поставленной задачи, состоит в расширении функциональных возможностей для безопасного и эффективного транспортирования и погрузочноразгрузочных работ с помощью одного агрегата с одним ходовым двигателем, обеспечении оптимальной зоны работы стрелы при одновременном расширении диапазона углов поворота передней рамы относительно задней рамы, увеличении угла подъема, преодолеваемого машиной, повышении долговечности,надежности и устойчивости, увеличении допустимой грузоподъемности и допустимого угла наклона машины при движении и стоянке, расширении возможностей управления и маневрирования в стесненных условиях, оптимизации компоновки и распределения нагрузок, повышении экономичности эксплуатации. Сущность изобретения состоит в том, что машина транспортная с краном-манипулятором и платформой содержит кабину, ходовой двигатель, устройство рулевого управления и шасси шарнирносочлененной конструкции из передней и задней рам, выполненных в виде сварных конструкций из продольных балок, соединенных поперечинами, при этом на передней раме установлены кабина с рулевым колесом, ходовой двигатель с гидромеханической передачей и передний ведущий мост, на задней раме установлен задний ведущий мост, две выносные опоры, грузовая платформа с откидными бортами и поворотный кран-манипулятор со складывающейся выдвижной стрелой, установленный со смещением относительно продольной оси рамы на 0,0630,0025 расстояния между осями переднего и заднего мостов,рамы соединены между собой верхними и нижними шарнирами, расположенными соосно один над другим, гидромеханическая передача связана с передним мостом одним карданным валом, а с задним мостом - двумя последовательно связанными карданными валами, при этом насос-дозатор подключен к насосу питания и к двум гидроцилиндрам поворота машины через шестилинейный и трехлинейный распределители, причем последний соединен через шаровой кран с шестисекционным распределителем,секции которого выполнены в виде пятилинейных распределителей и подключены параллельно к гидромотору поворота крана-манипулятора, гидроцилиндру наклона стрелы, гидроцилиндру складывания стрелы, двум соединенным одноименными поршневыми и штоковыми полостями гидроцилиндрам выдвижения стрелы и к двум гидроцилиндрам выносных опор. Предпочтительно колеса выполнены односкатными, а шины - пневматическими камерными с карьерным рисунком протектора, платформа выполнена выступающей за свободный край задней рамы, для наружного освещения и сигнализации установлены фары, габаритные фонари, сигналы торможения. На фиг. 1 изображен общий вид машины транспортной с краном-манипулятором и платформой, на фиг. 2 - вид сверху машины транспортной с краном-манипулятором и платформой, на фиг. 3 - зона работы стрелы крана-манипулятора, на фиг. 4 - схема гидравлическая принципиальная рулевого управления и управления краном-манипулятором. Машина транспортная с краном-манипулятором и платформой содержит кабину 1, ходовой двигатель 2 и шасси шарнирно-сочлененной конструкции из передней рамы 3 и задней рамы 4, выполненных в виде сварных конструкций из продольных балок (лонжеронов), соединенных поперечинами (не обозначены). На передней раме 3 установлены кабина 1 с рулевым колесом и колонкой рулевого управления(не обозначены), ходовой двигатель 2 с реверсивной гидромеханической передачей 5 и передний ведущий мост 6. На задней раме 4 установлен задний ведущий мост 7, грузовая платформа 11 и кранманипулятор 12. Рамы 3, 4 соединены между собой верхними и нижними фланцами со сферическими шарнирами 8, 9, расположенными соосно один над другим. В качестве шарниров 8, 9 использованы сферические подшипники с отверстиями и канавками для смазки во внутреннем и наружном кольцах. Ходовой двигатель 2 связан с передним мостом 6 одним карданным валом 10, а с задним мостом 7 двумя последовательно связанными карданными валами 13. Колонка рулевого управления соединена с регулирующим органом насоса-дозатора 14, подключенного через распределительную гидроаппаратуру 15 к двум параллельным гидроцилиндрам 16, 17 поворота машины, которые шарнирно соединены с передней и задней рамами 3, 4. Конструкция колонки рулевого управления (не изображено) обеспечивает отсутствие влияния осевых или радиальных сил на валу насоса-дозатора 14. Насос-дозатор 14 выполнен с возможностью автоматического возврата и удержания в нейтральном положении после завершения управляющего воздействия рулевого колеса. Питание насоса-дозатора 14 жидкостью под давлением 15010 кгс/см 2 осуществляет шестеренный насос 18, приводимый от двигателя 2. Максимальное рабочее давление в гидросистеме рулевого управления ограничивается настройкой предохранительного клапана (не обозначен). Противоударные (предохранительные) клапаны (не изображены) отрегулированы на срабатывание от воздействия внешних нагрузок при нейтральном положении насоса-дозатора 14 во время движения машины. Грузовая платформа 11 выполнена с откидными бортами (не обозначены). Поворотный кранманипулятор 12 выполнен со складывающейся выдвижной стрелой 30, состоящей из двух частей, и установлен со смещением, например вправо, относительно продольной оси рамы 4 на 2339 мм, что составляет 0,0630,0025 расстояния между осями переднего и заднего мостов 6, 7, равного 3520 мм. Насос-дозатор 14 подключен к насосу 18 питания и к двум гидроцилиндрам 16, 17 поворота машины через шестилинейный и трехлинейный распределители 24, 25, причем последний попеременно соединен через шаровой трехлинейный двухпозиционный кран 26 с баком 36 или с шестисекционным распределителем 27, секции которого выполнены в виде пятилинейных распределителей (не обозначены) и подключены параллельно к гидромотору 28 поворота крана-манипулятора 12, гидроцилиндру 29 наклона стрелы 30, гидроцилиндру 31 складывания (излома) стрелы 30, двум соединенным одноименными поршневыми и штоковыми полостями гидроцилиндрам 32, 33 выдвижения двух частей стрелы 30 и к двум гидроцилиндрам 34, 35 выносных опор 36. Опоры 36 расположены в части рамы 4, находящейся под краном-манипулятором 12. Гидроцилиндры 16, 17 поворота машины шарнирно закреплены гильзами на задней раме 4 и шарнирно соединены штоками с передней рамой 3. Колеса 19, 20, 21, 22 машины выполнены односкатными разъемными с приваренным установочным диском для крепления на ступице (не изображено), а шины - пневматическими камерными с карьерным рисунком протектора. Для строповки при погрузке машины на передней раме 3 предусмотрены прорези,на задней раме 4 имеются захваты, а для фиксации от складывания рам 3, 4 предусмотрена распорная штанга, которая при рабочем положении снята (не изображено). Машина имеет кабину 1 открытого типа и предназначается для работы при температуре окружающего воздуха от 0 до 40 С. Кабина 1 открытая, цельнометаллическая, оборудована дверью, сиденьем водителя и сиденьем для пассажира и предназначена для размещения в ней водителя (оператора) среднего роста, представляющего 50%-ную группу антропометрических данных, согласно ГОСТ 27250-97 (ИСО 3411-95). Кабина 1 крепится к раме 3 болтами через амортизирующие резиновые элементы, уменьшающие передачу вибрации при работающем двигателе 2 и устраняющие перекос кабины 1 при деформации рамы 3. В передней части кабины 1 предусмотрено место для размещения огнетушителя. Все органы управления расположены в соответствии с ГОСТ 12.2.106-85 в поле зрения и свободного доступа оператором с максимальным комфортом управления машиной. Сиденье водителя в кабине 1 имеет два рабочих положения с поворотом на 85 относительно вертикальной оси. Рулевое колесо расположено диагонально крайним положениям сиденья водителя. Для наружного освещения и сигнализации установлены фары, габаритные фонари, сигналы торможения (не изображены). Машина транспортная с краном-манипулятором и платформой работает следующим образом. Машина согласно своему назначению осуществляет в стесненных условиях шахт и тоннелей погрузку, транспортирование на платформе 11 и разгрузку грузов краном-манипулятором 12 в местах назначения. Ведущие мосты 6, 7 приводятся карданными валами 10, 13 от ходового двигателя 2 через гидромеханическую передачу 5 и передают крутящий момент на колеса 19-22. При движении на горизонтальном участке дороги максимальная для перевозки персонала в подземных условиях скорость 25 км/ч. Наибольший угол подъема, преодолеваемый машиной с полной массой на сухой дороге с твердым покрытием - 15. С помощью пары гидроцилиндров 16, 17 обеспечивается управление взаимным расположением рам 3, 4, позволяющее машине передвигаться по искривленным шахтным тоннелям с необходимым регулированием скорости колес 19-22 с помощью гидромеханиче-2 015950 ской передачи 5. Поворот машины осуществляется складыванием передней и задней рам 3, 4 двумя гидроцилиндрами 16, 17 поворота с помощью шарниров 8, 9. При установке рукоятки шарового крана 26 в транспортное положение рабочая жидкость поступает в бак, тем самым исключая возможность включения крана-манипулятора 12 в транспортном положении машины. Угол между осями рам 3, 4 может изменяться в широких пределах от 42 до 180. Минимальный внутренний радиус R1 поворота составляет 3320 мм, наружный радиус R2 поворота - 5710 мм. Это позволяет осуществлять поворот даже в узких тоннелях, пересекающихся под прямым углом (фиг. 2). Технологический цикл работы машины, оборудованной краном-манипулятором и платформой,включает следующие операции. Машина подъезжает к штабелю. Управление работой крана-манипулятора 12 осуществляется водителем, находящимся в кабине 1. Двигатель 2 является источником энергии для работы всех подвижных частей машины. Для выполнения погрузочно-разгрузочных работ по обе стороны рамы 4 выдвигаются(вручную) опоры 36 первоначально в сложенном виде. Гидроцилиндрами 34, 35 опоры 36 устанавливаются для переноса основной части нагрузки от стрелы 30 с моста 7 на грунт, гидроцилиндрами 29, 31,32 устанавливается нужное радиальное положение и наклон стрелы 30. Краном-манипулятором 12 груз из штабеля поднимается, поворачивается гидромотором 28 и загружается на платформу 11 путем управления гидроцилиндрами 29, 31, 32. Для транспортирования гидроцилиндры 34, 35 втягиваются и опоры 36 убираются. После доставки груза к месту назначения краномманипулятором 12 груз с платформы 11 выгружается из нее, например, в штабель. Откидные борта платформы 11 упрощают и облегчают действия крана-манипулятора 12. При этом кран-манипулятор имеет максимально возможную зону обслуживания с одной из сторон рамы 4, увеличенную за счет его смещенного расположения на раме 4, угловая зона ограничения поворота не превышает 30. Оптимальная зона поворота стрелы составляет 265. Гидромеханическая передача 5 обеспечивает передачу крутящего момента от двигателя 2 к ведущим мостам 6, 7 с возможностью переключения передач под нагрузкой. Наличие гидромеханической передачи 5 обеспечивает возможность работы по челночной схеме, то есть движения вперед и назад без разворотов, что, совместно с большим диапазоном углов взаимного поворота рам 3, 4, существенно расширяет возможности управления и маневрирования. При повороте рулевого колеса поворачивается связанная с ним колонка рулевого управления и регулирующий орган насоса-дозатора 14. В результате поток масла распределяется насосом-дозатором 14 и гидроаппаратурой 15 таким образом, что дозирует подачу жидкости (минерального масла) в гидроцилиндры 16, 17 пропорционально углу поворота рулевого колеса и, тем самым, управляет углом поворота машины. При складывании рам 3, 4 до отказа в какую-либо из сторон давление в соответствующем гидроцилиндре 16 или 17 будет повышаться до тех пор, пока не откроется предохранительный клапан (не обозначен), и рабочая жидкость будет перепускаться в линию слива. В случае возникновения в гидроцилиндре 16 или 17 давления от внешних воздействий, превышающего настройку противоударного клапана,последний открывается, и масло поступает в сливную магистраль. Конструкция машины разработана и выполнена с учетом применения в сложных и жестких подземных условиях рудников. Благодаря высокой мобильности машина эффективно работает в стесненных условиях выработок с площадью сечения не менее 3,63,0 м и имеет большую зону доступа стрелы и обслуживания, не менее 305 окружности. Таким образом, создана эффективная машина транспортная с краном-манипулятором и платформой, а также расширен арсенал машин транспортных. При этом обеспечено расширение функциональных возможностей для безопасного и эффективного транспортирования и погрузочно-разгрузочных работ с помощью одного агрегата с одним ходовым двигателем, расширены диапазоны углов поворота стрелы крана-манипулятора, а также передней рамы относительно задней рамы и углов подъема трассы, увеличена допустимая грузоподъемность и допустимый угол наклона машины при движении и стоянке, повышены безопасность, долговечность, надежность и устойчивость, расширены возможности управления и маневрирования в стесненных условиях,оптимизированы компоновка и распределение эксплуатационных нагрузок, повышена экономичность эксплуатации. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Машина транспортная с краном-манипулятором и платформой, содержащая кабину, ходовой двигатель, устройство рулевого управления и шасси шарнирно-сочлененной конструкции из передней и задней рам, выполненных в виде сварных конструкций из продольных балок, соединенных поперечинами, при этом на передней раме установлены кабина с рулевым колесом, ходовой двигатель с гидромеханической передачей и передний ведущий мост, на задней раме установлен задний ведущий мост, две выносные опоры, грузовая платформа с откидными бортами и поворотный кран-манипулятор со складывающейся выдвижной стрелой, установленный со смещением относительно продольной оси рамы на-3 015950 0,0630,0025 расстояния между осями переднего и заднего мостов, рамы соединены между собой верхними и нижними шарнирами, расположенными соосно один над другим, гидромеханическая передача связана с передним мостом одним карданным валом, а с задним мостом - двумя последовательно связанными карданными валами, при этом насос-дозатор подключен к насосу питания и к двум гидроцилиндрам поворота машины через шестилинейный и трехлинейный распределители, причем последний соединен через шаровой кран с шестисекционным распределителем, секции которого выполнены в виде пятилинейных распределителей и подключены параллельно к гидромотору поворота крана-манипулятора,гидроцилиндру наклона стрелы, гидроцилиндру складывания стрелы, двум соединенным одноименными поршневыми и штоковыми полостями гидроцилиндрам выдвижения стрелы и к двум гидроцилиндрам выносных опор. 2. Машина по п.1, отличающаяся тем, что ее колеса выполнены односкатными, а шины - пневматическими камерными с карьерным рисунком протектора. 3. Машина по любому из пп.1, 2, отличающаяся тем, что ее платформа выполнена выступающей за свободный край задней рамы. 4. Машина по любому из пп.1, 2, отличающаяся тем, что для наружного освещения и сигнализации установлены фары, габаритные фонари, сигналы торможения.
МПК / Метки
МПК: B62D 53/02, B60P 1/54, B66C 23/40, B66C 23/42
Метки: платформой, транспортная, краном-манипулятором, машина
Код ссылки
<a href="https://eas.patents.su/6-15950-mashina-transportnaya-s-kranom-manipulyatorom-i-platformojj.html" rel="bookmark" title="База патентов Евразийского Союза">Машина транспортная с краном-манипулятором и платформой</a>
Машина для корректировки положения рельсового пути
Номер патента: 9930
Опубликовано: 28.04.2008
Авторы: Тойрер Йозеф, Матцингер Эрвин
МПК: E01B 27/17
Метки: пути, корректировки, рельсового, машина, положения
Формула / Реферат:
1. Машина для корректировки положения рельсового пути, состоящая из многосекционной машинной рамы (6), которой придаётся сателлитная рама (13), имеющая подбивочный агрегат (9), а также агрегат (12) для подъёма рельсового пути и перемещающаяся относительно машинной рамы (6) с помощью привода (31), и стабилизирующий агрегат (11), отличающаяся тем, что между сателлитной рамой (13) и стабилизирующим агрегатом (11) располагается второй подбивочный...
Низкоуступная камнерезная машина
Номер патента: 6728
Опубликовано: 28.04.2006
Авторы: Кияев Дмитрий Владимирович, Гармс Андрей Яковлевич, Гарифов Владимир Сулейманович
МПК: B28D 1/04, E21C 47/10
Метки: низкоуступная, машина, камнерезная
Формула / Реферат:
1. Низкоуступная камнерезная машина, содержащая ходовую раму с опорными катками, механизм для перемещения ходовой рамы, по крайней мере одну вертикальную пилу с приводом для ее вращения, установленную с возможностью ее перемещения в вертикальной плоскости посредством гидроцилиндра, по крайней мере одну горизонтальную пилу с приводом для ее вращения и средством для горизонтального и вертикального перемещения, установленным на ходовой раме, и...
Транспортное средство с рабочей платформой
Номер патента: 15434
Опубликовано: 31.08.2011
Авторы: Флетцер Роберт, Тойрер Йозеф
МПК: B61D 15/00
Метки: транспортное, средство, рабочей, платформой
Формула / Реферат:
1. Транспортное средство с перемещаемой посредством рельсовых ходовых механизмов (2) машинной рамой (4) и регулируемой посредством приводов (5), связанной шарнирным соединением с машинной рамой (4) рабочей платформой (6), отличающееся тем, что на замыкающем машинную раму (4) относительно продольного направления машины (7) конце машины (8) расположен ленточный транспортер (10) с ориентированным в продольном направлении машины (7) направлением...
Транспортная тележка, в основном предназначаемая для использования в хлеве
Номер патента: 9890
Опубликовано: 28.04.2008
Авторы: Лабреке Жермэн, Лабреке Робер, Лабреке Гислэн
МПК: B62D 51/04, A01K 29/00, B62B 3/04...
Метки: основном, тележка, использования, предназначаемая, хлеве, транспортная
Формула / Реферат:
1. Транспортная тележка, содержащая раму тележки; по меньшей мере три наземных колеса для стабильного транспортирования рамы для движения над поверхностью грунта; причем по меньшей мере одно из колес выполнено с возможностью рулевого управления им, чтобы осуществлять рулевое управление тележкой в заданное местоположение; при этом рама и по меньшей мере одно из наземных колес выполнены с возможностью движения и рулевого управления, выполняемых...
Подбивочная машина
Номер патента: 15505
Опубликовано: 31.08.2011
Авторы: Тойрер Йозеф, Матцингер Эрвин
МПК: E01B 27/16, E01B 27/17
Метки: машина, подбивочная
Формула / Реферат:
1. Подбивочная машина с двумя смежными относительно поперечного направления рельсового пути или машины внутренними подбивочными блоками (13), а также с двумя соответственно примыкающими к ним внешними подбивочными блоками (24), при этом подбивочные блоки (13, 24) могут посредством приводов поперечного сдвига (14) независимо друг от друга перемещаться по поперечным направляющим (12), а также оснащены подбивочным инструментом (18), который...
Предыдущий патент: Способ получения замещенных адамантиларилмагний галогенидов
Следующий патент: Система элементов для монтажа интерьерной перегородки
Случайный патент: Способ коррекции функциональных расстройств организма человека