Цифровая следящая система
Номер патента: 16668
Опубликовано: 30.06.2012
Авторы: Ледник Геннадий Васильевич, Виноградов Сергей Михайлович, Стрижнев Александр Гаврилович, Ботеновский Сергей Леонидович, Гончарук Игорь Анатольевич, Шихов Алексей Александрович, Кирячок Геннадий Виталиевич

Формула / Реферат
Цифровая следящая система, содержащая задающее устройство, цифровой вычитатель, а также последовательно соединенные цифроаналоговый преобразователь, усилительно-преобразующее устройство, двигатель, редуктор, преобразователь угол-код, отличающаяся тем, что она дополнительно содержит цифровой сумматор и цифровой вычислитель, первый вход цифрового вычислителя соединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход соединен с выходом преобразователя угол-код и вычитающим входом цифрового вычитателя, а его выход подключен к второму входу цифрового сумматора, причем задающее устройство подключено к суммирующему входу цифрового вычитателя, а выход цифрового сумматора является входом цифроаналогового преобразователя.
Текст
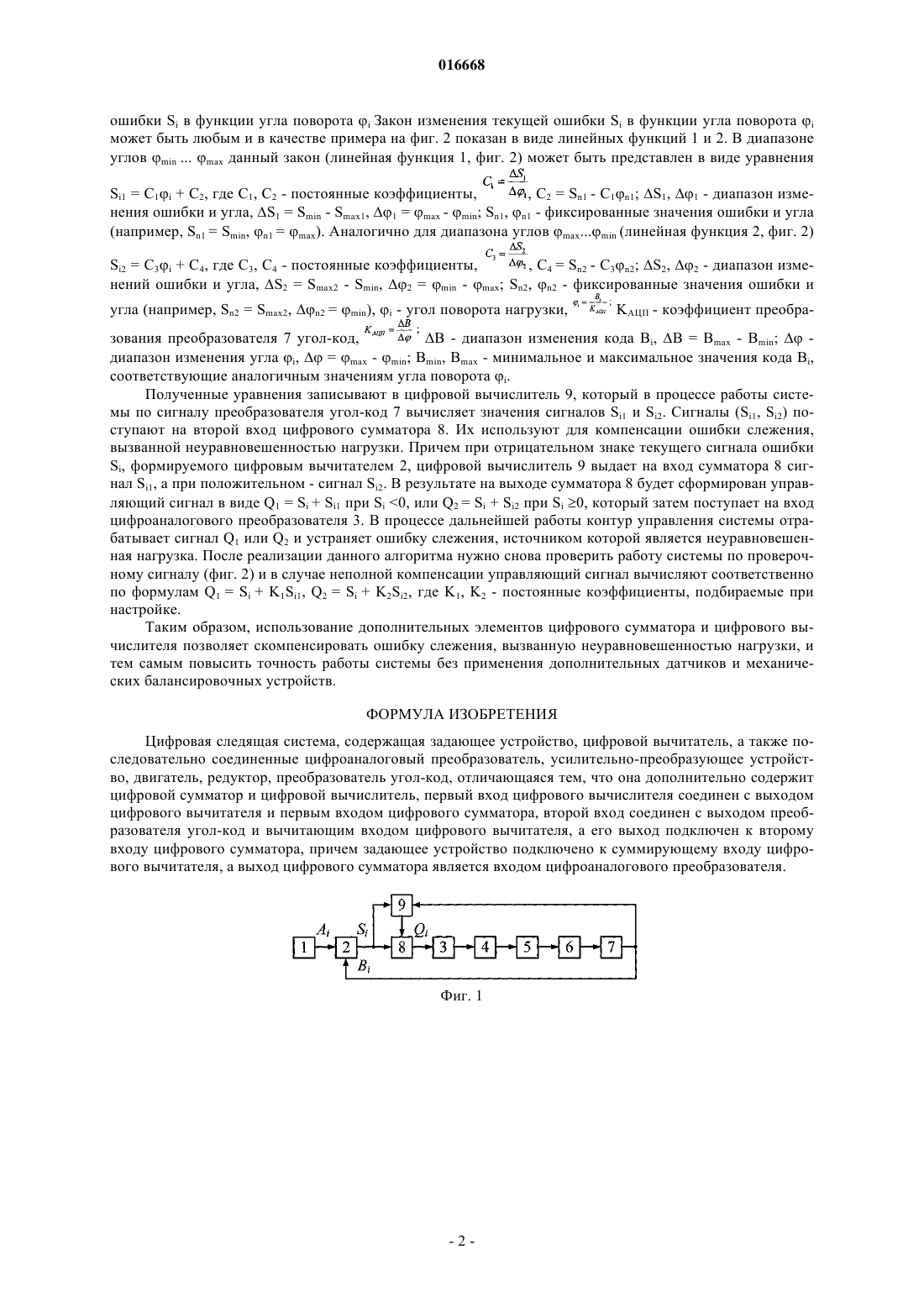
Предлагаемое изобретение относится к области автоматики и вычислительной техники и может быть использовано для построения цифровых систем слежения, в частности для слежения за подвижными объектами: радиолокационными антенными системами, оптическими телевизионными установками и т.д. Технический результат изобретения заключается в повышении точности работы системы при неуравновешенной нагрузке. Цифровая следящая система содержит задающее устройство, цифровой вычитатель, последовательно соединенные цифровой сумматор,цифроаналоговый преобразователь, усилительно-преобразующее устройство, двигатель, редуктор,преобразователь угол-код, а также цифровой вычислитель, первый вход которого объединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход подключен к выходу преобразователя угол-код и вычитающему входу цифрового вычитателя, а его выход подключен к второму входу цифрового сумматора, задающее устройство подключено к суммирующему входу цифрового вычитателя. Стрижнев Александр Гаврилович,Ледник Геннадий Васильевич, Шихов Алексей Александрович, Ботеновский Сергей Леонидович, Гончарук Игорь Анатольевич, Виноградов Сергей Михайлович, Кирячок Геннадий Виталиевич (BY) Федорук Е.Ю. (BY) 016668 Изобретение относится к области автоматики и вычислительной техники и может быть использовано для построения цифровых систем слежения, в частности для слежения за подвижными объектами: радиолокационными антенными системами, оптическими телевизионными установками и т.д. Известен следящий привод, содержащий последовательно соединенные чувствительный элемент,формирователь управляющих сигналов, усилитель мощности и исполнительный привод, с выходом которого связан вход чувствительного элемента, а также датчик момента и две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, включенные между выходом формирователя управляющих сигналов и входом усилителя мощности, причем управляющие входы управляемых усилителей-ограничителей соединены с выходом датчика момента, вход которого соединен с выходом усилителя мощности (1. Патент РФ 2145724, МПК G05B 11/01, 2000). Недостатком следящего привода является его сложность. Известен следящий привод, содержащий сумматор, усилитель, исполнительный привод, датчик положения нагрузки, датчик скорости, датчик момента, первый компаратор, второй компаратор, схему И,реле времени и схему блокировки (2. Патент РФ 2318232, МПК G05B 11/01, 2008). Недостатком данного следящего привода также является его сложность. Наиболее близкой к изобретению по технической сущности является цифровая следящая система,содержащая задающее устройство, цифровой вычитатель, цифроаналоговый преобразователь, усилительно-преобразующее устройство, исполнительный двигатель, редуктор и преобразователь угол-код (3. Теория автоматического управления. Под ред. Нетушила. М., Высшая школа, 1976, с. 285 - прототип). Недостатком известной цифровой следящей системы является низкая точность работы системы при неуравновешенной нагрузке. В основе изобретения лежит задача повышения точности работы системы при неуравновешенной нагрузке. Для решения поставленной задачи в цифровую следящую систему, содержащую задающее устройство, выход которого подключен к суммирующему входу цифрового вычитателя, и последовательно соединенные цифроаналоговый преобразователь, усилительно-преобразующее устройство и двигатель, вал которого через редуктор механически связан с преобразователем угол-код, дополнительно введены цифровой сумматор и цифровой вычислитель. Первый вход цифрового вычислителя соединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход соединен с выходом преобразователя угол-код и вычитающим входом цифрового вычитателя, а его выход подключен к второму входу цифрового сумматора, выход которого является входом цифроаналогового преобразователя. На фиг. 1 изображена функциональная схема предложенной цифровой следящей системы; на фиг. 2 - диаграммы, поясняющие работу системы при компенсации влияний неуравновешенной нагрузки. Цифровая следящая система содержит задающее устройство 1, цифровой вычитатель 2, цифроаналоговый преобразователь 3, усилительно-преобразующее устройство 4, двигатель 5, редуктор 6, преобразователь угол-код 7, цифровой сумматор 8, цифровой вычислитель 9. Система работает следующим образом. Задающее устройство 1 вырабатывает управляющий сигнал Ai в виде цифрового кода и подает его на вход цифрового вычитателя 2, где из управляющего сигнала вычитается сигнал Bi, в виде цифрового кода поступающий из преобразователя угол-код 7. Сигнал разности Si, вычисленный в цифровом вычитателе 2 по формуле Si = Ai - Bi, через цифровой сумматор 8 поступает на цифроаналоговый преобразователь 3. В преобразователе 3 сигнал Si преобразуется в напряжение постоянного тока, которое усиливается (или преобразуется, если нужно) усилительно-преобразующим устройством 4 до величины, необходимой для управления двигателем 5, который через редуктор 6 поворачивает преобразователь угол-код 7 на такой угол, при котором Si = 0. При работе цифровой следящей системы в диапазоне рабочих углов и наличии неуравновешенной нагрузки ошибка слежения не остается постоянной, а изменяется. Величина ошибки слежения зависит не только от скорости слежения, но и от характера неуравновешенности нагрузки. Балансировка нагрузки с помощью механических устройств достаточно трудна. Порой она даже невыполнима. Достаточно просто поставленную задачу можно решить путем компенсации. Для компенсации ошибки слежения, вызванной неуравновешенностью нагрузки, определяют закон изменения этой ошибки как функцию угла поворота нагрузки. Для определения данной функциональной зависимости используют саму цифровую следящую систему в тестовом режиме работы. С помощью задающего устройства 1 формируют управляющий сигналAi, линейно изменяющийся с постоянной малой скоростью во всем диапазоне рабочих сигналов от Amin до Amax и от Amax до Amin. Изменение управляющего сигнала Ai в двух направлениях движения является существенным и обязательным, особенно для систем, работающих в угломестной плоскости. График изменения управляющего сигнала Ai для двух направлений движения показан на фиг. 2. Управляющий сигнал Ai (фиг. 2) подают на вход системы и в процессе ее работы записывают текущие значения ошибкиSi и угла i поворота нагрузки. Используя полученные данные, строят графики зависимостей текущей-1 016668 ошибки Si в функции угла поворота i Закон изменения текущей ошибки Si в функции угла поворота i может быть любым и в качестве примера на фиг. 2 показан в виде линейных функций 1 и 2. В диапазоне углов minmax данный закон (линейная функция 1, фиг. 2) может быть представлен в виде уравнения, C2 = Sn1 - C1n1; S1, 1 - диапазон измеSi1 = C1i + C2, где C1, C2 - постоянные коэффициенты,нения ошибки и угла, S1 = Smin - Smax1, 1 = max - min; Sn1, n1 - фиксированные значения ошибки и угла(например, Sn1 = Smin, n1 = max). Аналогично для диапазона углов maxmin (линейная функция 2, фиг. 2), C4 = Sn2 - C3n2; S2, 2 - диапазон измеSi2 = C3i + C4, где C3, C4 - постоянные коэффициенты,нений ошибки и угла, S2 = Smax2 - Smin, 2 = min - max; Sn2, n2 - фиксированные значения ошибки и угла (например, Sn2 = Smax2, n2 = min), i - угол поворота нагрузки,B - диапазон изменения кода Bi, B = Bmax - Bmin;зования преобразователя 7 угол-код,диапазон изменения угла i,= max - min; Bmin, Bmax - минимальное и максимальное значения кода Bi,соответствующие аналогичным значениям угла поворота i. Полученные уравнения записывают в цифровой вычислитель 9, который в процессе работы системы по сигналу преобразователя угол-код 7 вычисляет значения сигналов Si1 и Si2. Сигналы (Si1, Si2) поступают на второй вход цифрового сумматора 8. Их используют для компенсации ошибки слежения,вызванной неуравновешенностью нагрузки. Причем при отрицательном знаке текущего сигнала ошибкиSi, формируемого цифровым вычитателем 2, цифровой вычислитель 9 выдает на вход сумматора 8 сигнал Si1, а при положительном - сигнал Si2. В результате на выходе сумматора 8 будет сформирован управляющий сигнал в виде Q1 = Si + Si1 при Si 0, или Q2 = Si + Si2 при Si 0, который затем поступает на вход цифроаналогового преобразователя 3. В процессе дальнейшей работы контур управления системы отрабатывает сигнал Q1 или Q2 и устраняет ошибку слежения, источником которой является неуравновешенная нагрузка. После реализации данного алгоритма нужно снова проверить работу системы по проверочному сигналу (фиг. 2) и в случае неполной компенсации управляющий сигнал вычисляют соответственно по формулам Q1 = Si + K1Si1, Q2 = Si + K2Si2, где K1, K2 - постоянные коэффициенты, подбираемые при настройке. Таким образом, использование дополнительных элементов цифрового сумматора и цифрового вычислителя позволяет скомпенсировать ошибку слежения, вызванную неуравновешенностью нагрузки, и тем самым повысить точность работы системы без применения дополнительных датчиков и механических балансировочных устройств. ФОРМУЛА ИЗОБРЕТЕНИЯ Цифровая следящая система, содержащая задающее устройство, цифровой вычитатель, а также последовательно соединенные цифроаналоговый преобразователь, усилительно-преобразующее устройство, двигатель, редуктор, преобразователь угол-код, отличающаяся тем, что она дополнительно содержит цифровой сумматор и цифровой вычислитель, первый вход цифрового вычислителя соединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход соединен с выходом преобразователя угол-код и вычитающим входом цифрового вычитателя, а его выход подключен к второму входу цифрового сумматора, причем задающее устройство подключено к суммирующему входу цифрового вычитателя, а выход цифрового сумматора является входом цифроаналогового преобразователя.
МПК / Метки
МПК: G05B 19/406, G05B 11/00
Метки: следящая, цифровая, система
Код ссылки
<a href="https://eas.patents.su/4-16668-cifrovaya-sledyashhaya-sistema.html" rel="bookmark" title="База патентов Евразийского Союза">Цифровая следящая система</a>
Цифровая вещательная система, использующая спутниковое прямое вещание и наземный ретранслятор
Номер патента: 2604
Опубликовано: 27.06.2002
Автор: Кампанелла С.Джозеф
МПК: H04H 1/00, H04B 7/155
Метки: ретранслятор, наземный, цифровая, спутниковое, вещательная, вещание, использующая, система, прямое
Формула / Реферат:
1. Цифровая вещательная система для передачи вещательного сигнала, причем упомянутый вещательный сигнал передается от наземной станции, содержащая спутник для приема упомянутого вещательного сигнала от упомянутой наземной станции и для передачи спутникового сигнала, содержащего упомянутый вещательный сигнал на первой несущей частоте и наземный ретранслятор для приема упомянутого спутникового сигнала и для формирования и передачи наземного...
Прибор для измерения метеорологической дальности видимости
Номер патента: 3433
Опубликовано: 24.04.2003
Авторы: Руховец Владимир Васильевич, Конев Иван Леонидович, Жуков Олег Николаевич
МПК: G01W 1/00, G01N 21/00
Метки: видимости, прибор, метеорологической, дальности, измерения
Формула / Реферат:
Прибор для измерения метеорологической дальности видимости, включающий излучатель и оптически сопряженные с ним приемник ближней базы и приемник дальней базы, причем излучатель включает в себя источник света, оптически сопряженные с ним первый объектив и светоделительное устройство, блок питания источника света, выход которого соединен с входом источника света, первый фотоприемник, оптически сопряженный со светоделительным устройством, первый...
Система управления зенитного ракетного комплекса малой дальности
Номер патента: 2202
Опубликовано: 28.02.2002
Авторы: Толкачев Михаил Александрович, Беркович Геннадий Михайлович, Ботвинов Алексей Кузьмич, Барсукова Софья Алексеевна, Ефремов Вениамин Павлович, Павлов Евгений Яковлевич, Дризе Иосиф Матвеевич, Корчагин Сергей Николаевич, Фомин Роберт Анатольевич, Безверхов Михаил Алексеевич, Чирков Валерий Иванович, Чибисов Станислав Иванович, Сосков Юрий Александрович, Осипов Валентин Валентинович, Хворых Юрий Васильевич, Абрамов Владимир Иванович, Войсковский Евгений Иосифович, Парфенов Александр Иванович, Морозов Валерий Вениаминович
МПК: G01S 13/72
Метки: дальности, малой, комплекса, ракетного, управления, зенитного, система
Формула / Реферат:
Система управления зенитного ракетного комплекса малой дальности, включающая размещенные на едином самоходном шасси или в транспортном контейнере средства обнаружения с радиолокатором кругового обзора, радиолокационный запросчик опознавания, средства сопровождения и точного измерения координат цели и ракеты, средства отображения информации, аппаратуру предстартовой подготовки ракеты и производства пуска, радиоответчик, автопилот ракеты,...
Устройство управления
Номер патента: 1498
Опубликовано: 23.04.2001
Авторы: Никодимов Алексей Виссарионович, Рытов Геннадий Цодикович
МПК: D04B 15/78, G05B 19/18
Метки: управления, устройство
Формула / Реферат:
1. Устройство управления, содержащее программное запоминающее устройство (ЗУ), запоминающее устройство (ЗУ) данных, связанные с устройством записи/считывания, вычислитель, элементы индикации и клавиатуру, отличающееся тем, что оно снабжено датчиком для связи с управляемым устройством, программируемым реверсивным счетчиком, преобразователем кодов, сдвиговым регистром, пускателем для включения/выключения управляемого двигателя и дополнительной...
Система преобразования частоты для параболических антенн
Номер патента: 2005
Опубликовано: 22.10.2001
Автор: Лотфи Камаль
МПК: H01Q 1/24
Метки: параболических, преобразования, система, частоты, антенн
Формула / Реферат:
1. Система преобразования частоты для параболической антенны, которая предназначена для приема сигналов с линейными вертикальной и горизонтальной поляризациями, передаваемых двумя геостационарными спутниками, которые находятся на небольшом расстоянии друг от друга, и выполнена согласно варианту, содержащему два устройства преобразования частоты, предназначенные для приема сигнала, поступающего от одного спутника, при этом каждое устройство...
Предыдущий патент: Метод и оборудование для очистки сланцевого масла от твердых частиц
Следующий патент: Способ и цифровая следящая система для определения и компенсации влияний неуравновешенности нагрузки на работу следящих систем и приводов
Случайный патент: Фармацевтическая композиция для лечения аутоиммунных заболеваний