Способ и цифровая следящая система для определения и компенсации влияний неуравновешенности нагрузки на работу следящих систем и приводов
Номер патента: 16669
Опубликовано: 30.06.2012
Авторы: Ледник Геннадий Васильевич, Кирячок Геннадий Виталиевич, Шихов Алексей Александрович, Стрижнев Александр Гаврилович, Гончарук Игорь Анатольевич, Виноградов Сергей Михайлович, Ботеновский Сергей Леонидович
Формула / Реферат
1. Способ определения и компенсации влияний неуравновешенности нагрузки на точность работы следящих систем или приводов, согласно которому для определения указанных влияний используют саму систему, которую переводят в тестовый режим слежения, на вход подают линейно-изменяющиеся с постоянной малой скоростью во всем диапазоне рабочих углов для двух направлений движения нагрузки проверочные управляющие сигналы, в процессе функционирования оценивают влияние неуравновешенности нагрузки на точность слежения путем измерений и графическим отображением текущих изменений ошибок слежения в функции углов поворота нагрузки, которые в последующем представляют и запоминают в виде аналитических выражений, для компенсации выявленных влияний неуравновешенности нагрузки в контуры следящих систем или приводов вносят компенсационные сигналы, которые вычисляют по запомненным аналитическим выражениям, для чего используют сигналы углового положения нагрузки и знака текущей ошибки рассогласования, причем для осуществления более полной компенсации влияний неуравновешенности нагрузки компенсационные сигналы могут содержать поправочные коэффициенты, которые подбирают при настройке.
2. Цифровая следящая система, реализующая предложенный способ, содержащая задающее устройство, цифровой вычитатель, а также последовательно соединенные цифровой регулятор, цифровое усилительно-преобразовательное устройство, исполнительный двигатель, приводной механизм, преобразователь угол-код, отличающаяся тем, что в ее состав дополнительно введены цифровой сумматор и цифровой вычислитель, первый вход которого объединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход объединен с выходом преобразователя угол-код и вычитающим входом цифрового вычитателя, а его выход соединен со вторым входом цифрового сумматора, причем выход задающего устройства подключен к суммирующему входу цифрового вычитателя, а выход цифрового сумматора подключен к входу цифрового регулятора.
Текст
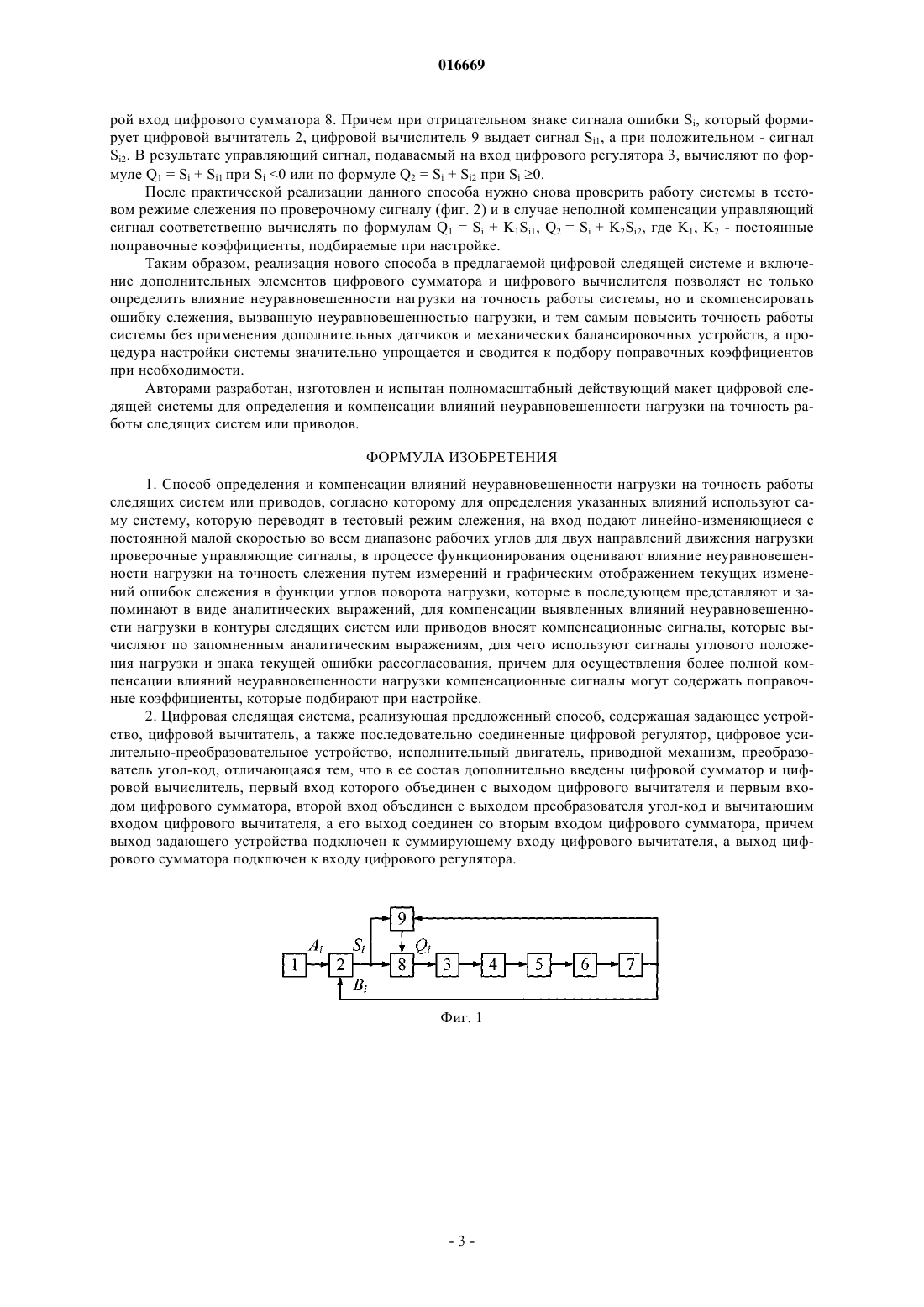
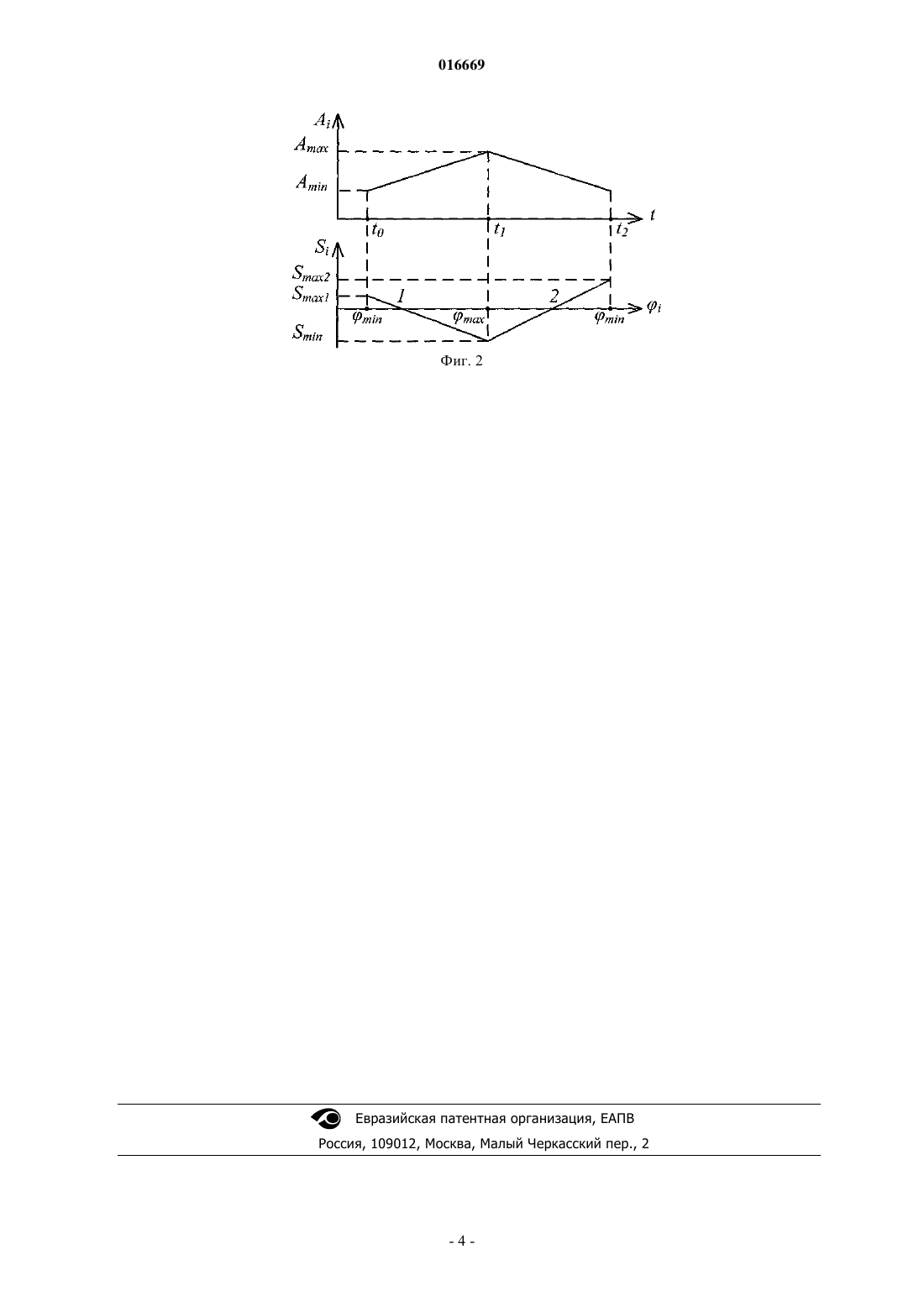
СПОСОБ И ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ВЛИЯНИЙ НЕУРАВНОВЕШЕННОСТИ НАГРУЗКИ НА РАБОТУ СЛЕДЯЩИХ СИСТЕМ И ПРИВОДОВ Анатольевич, Виноградов Сергей Михайлович, Кирячок Геннадий Виталиевич (BY) Изобретение относится к способу выявления конструктивных недостатков цифровых следящих систем для определения и компенсации влияний неуравновешенности нагрузки на работу следящих систем и приводов в области автоматики и вычислительной техники и может быть использовано для повышения точности работы следящих систем и приводов, имеющих неуравновешенность нагрузки. Задачей изобретения является упрощение настройки и повышение точности работы следящих систем и приводов, имеющих неуравновешенность нагрузки без применения дополнительных датчиков и специального оборудования. Данная задача согласно предлагаемому способу решается тем, что для определения влияний неуравновешенности нагрузки на точность работы следящих систем или приводов используют саму систему,которую переводят в тестовый режим слежения, на вход подают линейно-изменяющиеся с постоянной малой скоростью во всем диапазоне рабочих углов для двух направлений движения нагрузки проверочные управляющие сигналы, в процессе функционирования оценивают влияние неуравновешенности нагрузки на точность слежения путем измерений и графическим отображением текущих изменений ошибок слежения в функции углов поворота нагрузки, которые в последующем представляют и запоминают в виде аналитических выражений, для компенсации выявленных влияний неуравновешенности нагрузки в контуры следящих систем или приводов вносят компенсационные сигналы, которые вычисляют по запомненным аналитическим выражениям, для чего используют сигналы углового положения нагрузки и знака текущей ошибки рассогласования, причем для осуществления более полной компенсации влияний неуравновешенности нагрузки компенсационные сигналы могут содержать поправочные коэффициенты, которые подбирают при настройке. Цифровая следящая система, реализующая предложенный способ, содержит задающее устройство,цифровой вычитатель, а также последовательно соединенные цифровой регулятор, цифровое усилительнопреобразовательное устройство, исполнительный двигатель, приводной механизм, преобразователь угол-код,согласно изобретению в ее состав дополнительно включены цифровой сумматор и цифровой вычислитель,первый вход которого объединен с выходом цифрового вычитателя и первым входом цифрового сумматора,второй вход объединен с выходом преобразователя угол-код и вычитающим входом цифрового вычитателя, а его выход соединен с вторым входом цифрового сумматора, причем выход задающего устройства подключен к суммирующему входу цифрового вычитателя, а выход цифрового сумматора подключен к входу цифрового регулятора. 016669 Изобретение относится к способу выявления конструктивных недостатков цифровых следящих систем для определения и компенсации влияний неуравновешенности нагрузки на работу следящих систем и приводов в области автоматики и вычислительной техники и может быть использовано для повышения точности работы следящих систем и приводов, имеющих неуравновешенность нагрузки. Известны способы определения механической неуравновешенности нагрузки в системах с отрицательной обратной связью. Данные способы заключаются в использовании информации от датчиков момента или положения нагрузки при формировании управляющих сигналов системы (А.С.2145724,МПК G05B 11/01, В 66 В 1/30; А.С.2318232, МПК G05B 11/01; А.С.2318233, МПК G05B 11/01). Для реализации известных способов используют следящие системы с применением дополнительных датчиков момента или положения нагрузки, позволяющие определить момент неуравновешенности нагрузки непосредственно или косвенно через положение и ориентацию нагрузки относительно оси вращения. Недостатками известных способов определения механической неуравновешенности нагрузки являются сложность и трудность настройки систем, в которых они используются, так как при высокой чувствительности дополнительных датчиков работа систем становиться неустойчивой, а при низкой чувствительности датчиков - снижается их точность работы. Известны способы определения статической и динамической неуравновешенности нагрузки (Левит М.Е., Рыженков В.М. Балансировка деталей и узлов. - М.: Машиностроение, 1986, 248 с., ил.; Справочник по балансировке/М.Е. Левит, Ю.А. Агафонов, Л.Д. Вайнгортин и др.; под общ. ред. М.Е. Левита. М.: Машиностроение, 1992, 464 с., ил.). Данные способы отличаются от предыдущих тем, что дополнительное оборудование и датчики применяют только на стадии изготовления механизмов и деталей. Недостатками данных способов определения и устранения неуравновешенности нагрузки являются необходимость иметь специальное оборудование и контрольно-измерительную аппаратуру, а также большая трудоемкость измерительных и настроечных работ. Все это не позволяет использовать известные технические решения в качестве прототипа способа. Наиболее близкой к изобретению по технической сущности является цифровая следящая система,содержащая задающее устройство, цифровой вычитатель, цифроаналоговый преобразователь, усилительно-преобразующее устройство, исполнительный двигатель, редуктор и преобразователь угол-код(Теория автоматического управления. Под ред. Нетушила. М., Высшая школа, 1976, с. 285 - прототип следящей системы). Недостатком известной цифровой следящей системы является низкая точность работы системы при неуравновешенной нагрузке. Задачей изобретения является упрощение настройки и повышение точности работы следящих систем и приводов, имеющих неуравновешенность нагрузки, без применения дополнительных датчиков и специального оборудования. Определить неуравновешенность статической нагрузки и скомпенсировать ее влияния предлагается способом, описанным ниже. Данная задача согласно предлагаемому способу решается тем, что для определения влияний неуравновешенности нагрузки на точность работы следящих систем или приводов используют саму систему, которую переводят в тестовый режим слежения, на вход подают линейно-изменяющиеся с постоянной малой скоростью во всем диапазоне рабочих углов для двух направлений движения нагрузки проверочные управляющие сигналы, в процессе функционирования оценивают влияние неуравновешенности нагрузки на точность слежения путем измерений и графическим отображением текущих изменений ошибок слежения в функции углов поворота нагрузки, которые в последующем представляют и запоминают в виде аналитических выражений, для компенсации выявленных влияний неуравновешенности нагрузки в контуры следящих систем или приводов вносят компенсационные сигналы, которые вычисляют по запомненным аналитическим выражениям, для чего используют сигналы углового положения нагрузки и знака текущей ошибки рассогласования, причем для осуществления более полной компенсации влияний неуравновешенности нагрузки компенсационные сигналы могут содержать поправочные коэффициенты, которые подбирают при настройке. Цифровая следящая система, реализующая предложенный способ, содержит задающее устройство,цифровой вычитатель, а также последовательно соединенные цифровой регулятор, цифровое усилительно-преобразовательное устройство, исполнительный двигатель, приводной механизм, преобразователь угол-код, согласно изобретению в ее состав дополнительно включены цифровой сумматор и цифровой вычислитель, первый вход которого объединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход объединен с выходом преобразователя угол-код и вычитающим входом цифрового вычитателя, а его выход соединен с вторым входом цифрового сумматора, причем выход задающего устройства подключен к суммирующему входу цифрового вычитателя, а выход цифрового сумматора подключен к входу цифрового регулятора. Предлагаемая цифровая следящая система может быть использована для определения влияния неуравновешенности нагрузки и компенсации этого влияния вышеизложенным способом. Причем цифро-1 016669 вой вычислитель вычисляет компенсационные сигналы, а цифровой сумматор вносит их в контур следящей системы. Возможны и другие варианты внесения компенсационных сигналов в контуры следящих систем и приводов. Предлагаемый способ может быть использован в любой следящей системе или приводе различного типа. Далее изобретение будет подробно пояснено со ссылками на прилагаемые чертежи, на которых изображены на фиг. 1 - функциональная схема цифровой следящей системы, реализующая предлагаемый способ; на фиг. 2 - диаграммы, поясняющие сущность реализации данного способа при определении и компенсации влияний неуравновешенности нагрузки для прямого и обратного направлений слежения. Цифровая следящая система содержит последовательно соединенные задающее устройство 1, цифровой вычитатель 2, цифровой сумматор 8, цифровой регулятор 3, цифровое усилительнопреобразовательное устройство 4, исполнительный двигатель 5, приводной механизм 6, преобразователь 7 угол-код, цифровой вычислитель 9, выход которого подключен к второму входу цифрового сумматора 8, а первый и второй входы соответственно подключены к выходам цифрового вычитателя 2 и преобразователя 7 угол-код, выход которого подключен к второму входу цифрового вычитателя 2. Система работает следующим образом. Задающее устройство 1 вырабатывает управляющий сигнал Ai в виде цифрового кода, который поступает на суммирующий вход цифрового вычитателя 2, где из управляющего сигнала вычитается сигнал Bi, поступающий из преобразователя 7 угол-код. Сигнал разности Si, полученный в цифровом вычитателе 2 по формуле Si = Ai-Bi, поступает через цифровой сумматор 8 на цифровой регулятор 3. Цифровой регулятор 3 обеспечивает требуемые динамические показатели системы и формирует сигналы управления для цифрового усилительно-преобразовательного устройства 4. Устройство 4 усиливает и,если нужно, преобразует эти сигналы в напряжения, необходимые для управления исполнительным двигателем 5. Двигатель 5 через приводной механизм 6 поворачивает преобразователь 7 угол-код на такой угол, при котором Si= 0. При работе цифровой следящей системы в диапазоне рабочих углов и при наличии неуравновешенности нагрузки, действующей на приводной механизм, ошибка слежения не остается постоянной, а изменяется. Величина ошибки слежения зависит не только от скорости слежения, но и от характера неуравновешенности нагрузки. Балансировка нагрузки с помощью механических устройств достаточно трудная, а порой и не выполнимая задача. Достаточно просто можно решить данную задачу путем компенсации. Сначала нужно определить закон изменения ошибки слежения как функцию угла поворота нагрузки, для чего предлагается использовать саму цифровую следящую систему, которую переводят в тестовый режим слежения. С помощью задающего устройства 1 формируют управляющий сигнал Ai, линейно изменяющийся с постоянной малой скоростью во всем диапазоне рабочих сигналов в двух направлениях движения от Amin до Amax и от Amax до Amin. Причем изменение управляющего сигнала Ai в двух направлениях движения является существенным и обязательным, особенно для систем, работающих в угломестной плоскости. График изменения управляющего сигнала Ai для двух направлений движения показан на фиг. 2. Этот управляющий сигнал подают на вход системы и в процессе ее работы записывают текущие значения ошибки Si и угла i поворота нагрузки. Используя полученные данные, строят графики зависимостей текущей ошибки Si в функции угла поворота i. Закон изменения текущей ошибки Si в функции угла поворота i может быть любым, и в качестве примера он показан на фиг. 2 в виде линейных функций 1 и 2. В диапазоне углов minmax данный закон (линейная функция 1, фиг. 2) может быть представлен вC2 = Sn1 - C1n1; S1, 1 виде уравнения Si1 = C1i + C2, где C1, C2 - постоянные коэффициенты,диапазон изменения ошибки и угла, S1 = Smin - Smax1, 1 = max - min1; Sn1, n1 - фиксированные значения ошибки и угла (например, Sn1 = Smin1, n1 = max). Аналогично для диапазона углов maxmin (линейная функция 2, фиг. 2): Si2 = C3i + C4, где C3, C4 C4 = Sn2 - C3n2; S2, 2 - диапазон изменений ошибки и угла, S2 = постоянные коэффициенты,Smax2-Smin, 2 = min - max; Sn2,n2 - фиксированные значения ошибки и угла (например, Sn2 = Smax2, n2 =KАЦП - коэффициент преобразования преобразователя 7 уголB - диапазон изменения кода Bi, B = Bmax - Bmin;- диапазон изменения угла i,= max код,min; Bmin, Bmax - минимальное и максимальное значения кода Bi, соответствующие аналогичным значениям угла поворота i. Полученные таким образом законы записывают в цифровой вычислитель 9, а систему переводят в штатный режим работы. Цифровой вычислитель 9 в процессе работы системы по сигналам преобразователя 7 угол-код вычисляет текущие значения сигналов Si1 и Si2. Эти сигналы (Si1 и Si2) поступают на вто-2 016669 рой вход цифрового сумматора 8. Причем при отрицательном знаке сигнала ошибки Si, который формирует цифровой вычитатель 2, цифровой вычислитель 9 выдает сигнал Si1, а при положительном - сигналSi2. В результате управляющий сигнал, подаваемый на вход цифрового регулятора 3, вычисляют по формуле Q1 = Si + Si1 при Si 0 или по формуле Q2 = Si + Si2 при Si 0. После практической реализации данного способа нужно снова проверить работу системы в тестовом режиме слежения по проверочному сигналу (фиг. 2) и в случае неполной компенсации управляющий сигнал соответственно вычислять по формулам Q1 = Si + K1Si1, Q2 = Si + K2Si2, где K1, K2 - постоянные поправочные коэффициенты, подбираемые при настройке. Таким образом, реализация нового способа в предлагаемой цифровой следящей системе и включение дополнительных элементов цифрового сумматора и цифрового вычислителя позволяет не только определить влияние неуравновешенности нагрузки на точность работы системы, но и скомпенсировать ошибку слежения, вызванную неуравновешенностью нагрузки, и тем самым повысить точность работы системы без применения дополнительных датчиков и механических балансировочных устройств, а процедура настройки системы значительно упрощается и сводится к подбору поправочных коэффициентов при необходимости. Авторами разработан, изготовлен и испытан полномасштабный действующий макет цифровой следящей системы для определения и компенсации влияний неуравновешенности нагрузки на точность работы следящих систем или приводов. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения и компенсации влияний неуравновешенности нагрузки на точность работы следящих систем или приводов, согласно которому для определения указанных влияний используют саму систему, которую переводят в тестовый режим слежения, на вход подают линейно-изменяющиеся с постоянной малой скоростью во всем диапазоне рабочих углов для двух направлений движения нагрузки проверочные управляющие сигналы, в процессе функционирования оценивают влияние неуравновешенности нагрузки на точность слежения путем измерений и графическим отображением текущих изменений ошибок слежения в функции углов поворота нагрузки, которые в последующем представляют и запоминают в виде аналитических выражений, для компенсации выявленных влияний неуравновешенности нагрузки в контуры следящих систем или приводов вносят компенсационные сигналы, которые вычисляют по запомненным аналитическим выражениям, для чего используют сигналы углового положения нагрузки и знака текущей ошибки рассогласования, причем для осуществления более полной компенсации влияний неуравновешенности нагрузки компенсационные сигналы могут содержать поправочные коэффициенты, которые подбирают при настройке. 2. Цифровая следящая система, реализующая предложенный способ, содержащая задающее устройство, цифровой вычитатель, а также последовательно соединенные цифровой регулятор, цифровое усилительно-преобразовательное устройство, исполнительный двигатель, приводной механизм, преобразователь угол-код, отличающаяся тем, что в ее состав дополнительно введены цифровой сумматор и цифровой вычислитель, первый вход которого объединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход объединен с выходом преобразователя угол-код и вычитающим входом цифрового вычитателя, а его выход соединен со вторым входом цифрового сумматора, причем выход задающего устройства подключен к суммирующему входу цифрового вычитателя, а выход цифрового сумматора подключен к входу цифрового регулятора.
МПК / Метки
МПК: G05B 19/406, G05B 11/00
Метки: нагрузки, компенсации, способ, следящих, неуравновешенности, систем, следящая, определения, цифровая, влияний, система, приводов, работу
Код ссылки
<a href="https://eas.patents.su/5-16669-sposob-i-cifrovaya-sledyashhaya-sistema-dlya-opredeleniya-i-kompensacii-vliyanijj-neuravnoveshennosti-nagruzki-na-rabotu-sledyashhih-sistem-i-privodov.html" rel="bookmark" title="База патентов Евразийского Союза">Способ и цифровая следящая система для определения и компенсации влияний неуравновешенности нагрузки на работу следящих систем и приводов</a>
Цифровая следящая система
Номер патента: 16668
Опубликовано: 30.06.2012
Авторы: Стрижнев Александр Гаврилович, Виноградов Сергей Михайлович, Кирячок Геннадий Виталиевич, Ботеновский Сергей Леонидович, Шихов Алексей Александрович, Гончарук Игорь Анатольевич, Ледник Геннадий Васильевич
МПК: G05B 19/406, G05B 11/00
Метки: цифровая, следящая, система
Формула / Реферат:
Цифровая следящая система, содержащая задающее устройство, цифровой вычитатель, а также последовательно соединенные цифроаналоговый преобразователь, усилительно-преобразующее устройство, двигатель, редуктор, преобразователь угол-код, отличающаяся тем, что она дополнительно содержит цифровой сумматор и цифровой вычислитель, первый вход цифрового вычислителя соединен с выходом цифрового вычитателя и первым входом цифрового сумматора, второй вход...
Способ и система для компенсации путем вычитания взаимных помех в системе множественного доступа
Номер патента: 1051
Опубликовано: 28.08.2000
Автор: Бендер Пол Е.
МПК: H04B 1/707
Метки: система, взаимных, вычитания, доступа, помех, множественного, способ, компенсации, системе, путем
Формула / Реферат:
1. Способ обработки сигналов прямой линии связи беспроводной телекоммуникационной системы, включающий этапы (a) приема первого сигнала прямой линии связи и второго сигнала прямой линии связи, (b) оценки значения данных, переданных посредством упомянутого первого сигнала прямой линии связи, (c) формирования идеального сигнала на основе упомянутого значения данных, (d) вычитания упомянутого идеального сигнала из упомянутого второго сигнала...
Способ и система для компенсации вызванного внутренними причинами смещения ткани
Номер патента: 12885
Опубликовано: 30.12.2009
Авторы: Шоуэнборг Йенс, Петерссон Пер
МПК: A61B 19/00, A61G 13/02, A61B 5/11...
Метки: вызванного, система, внутренними, компенсации, смещения, ткани, способ, причинами
Формула / Реферат:
1. Способ компенсации вызванного нервным импульсом или другими внутренними причинами смещения ткани животного организма, включая человека, содержащейся в части тела, зафиксированной на основании в контакте со средством перемещения, включающий: (a) размещение в ткани или вблизи нее метки или идентификация в качестве метки структуры, находящейся в ткани или вблизи нее, (b) получение параметров положения от указанной метки или структуры, (c)...
Способ и система для переключения нагрузки между источниками напряжения переменного тока
Номер патента: 9562
Опубликовано: 28.02.2008
Автор: Виттнер Лупу
МПК: H02J 1/00
Метки: напряжения, способ, тока, источниками, переменного, между, нагрузки, переключения, система
Формула / Реферат:
1. Способ переключения электрической нагрузки с исходного источника напряжения на заключительный источник напряжения, в котором нагрузка сначала подсоединена к исходному источнику напряжения, характеризующийся тем, что содержит этапы, на которых: (а) к нагрузке подсоединяют временный источник напряжения так, что указанный временный источник напряжения подсоединен к исходному источнику напряжения, причем временный источник напряжения подсоединен...
Способ и система управления для снижения тепловой нагрузки на животных
Номер патента: 13366
Опубликовано: 30.04.2010
Автор: Эрлемарк Андерс
МПК: A01K 1/12, F24F 11/00, A01K 1/00...
Метки: животных, нагрузки, тепловой, система, снижения, управления, способ
Формула / Реферат:
1. Способ управления средством охлаждения для снижения тепловой нагрузки на животных, отличающийся тем, что упомянутый способ содержит следующие этапы, на которых:включают упомянутое средство охлаждения, когда температура воздуха превосходит предварительно заданное пороговое значение, и/или параметр, зависящий от относительной влажности воздуха, превосходит предварительно заданное пороговое значение, при этом упомянутое средство охлаждения...
Предыдущий патент: Цифровая следящая система
Следующий патент: Способ и устройства для очистки ствола скважины, имеющие гибкую насосно-компрессорную трубу и электрическую насосную установку
Случайный патент: Присоединительная арматура