Механизм привода станка-качалки
Номер патента: 20608
Опубликовано: 30.12.2014
Авторы: Джолдасбеков Скандербек Умирбекович, Ременцов Андрей Николаевич, Журсенбаев Балахазы Ибрайович
Формула / Реферат
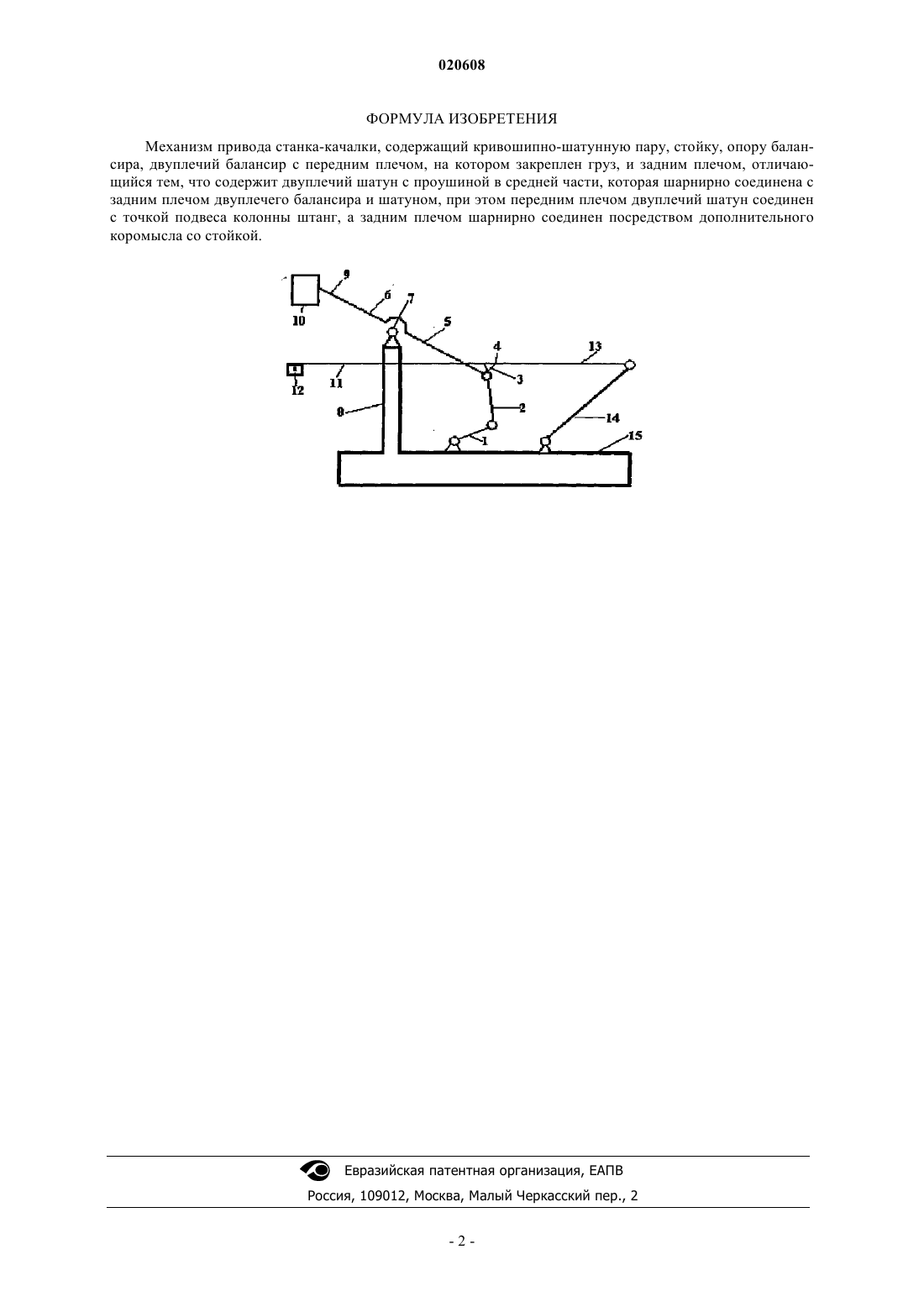
Механизм привода станка-качалки, содержащий кривошипно-шатунную пару, стойку, опору балансира, двуплечий балансир с передним плечом, на котором закреплен груз, и задним плечом, отличающийся тем, что содержит двуплечий шатун с проушиной в средней части, которая шарнирно соединена с задним плечом двуплечего балансира и шатуном, при этом передним плечом двуплечий шатун соединен с точкой подвеса колонны штанг, а задним плечом шарнирно соединен посредством дополнительного коромысла со стойкой.
Текст
Изобретение относится к нефтегазовому машиностроению, а именно к нефтепромысловым машинам и оборудованию, и может быть использовано в наземном механическом приводе штанговых скважинных насосных установок (ШСНУ) для добычи нефти. Технический результат уменьшение металлоемкости и габаритов механизма привода СК. Механизм привода станкакачалки содержит кривошипно-шатунную пару, стойку, опору балансира, двуплечий балансир с передним плечом, на котором закреплен груз, и задним плечом, двуплечий шатун с проушиной в средней части, которая шарнирно соединена с задним плечом двуплечего балансира и шатуном,при этом передним плечом двуплечий шатун соединен с точкой подвеса колонны штанг, а задним плечом шарнирно соединен посредством дополнительного коромысла со стойкой. Джолдасбеков Скандербек Умирбекович, Журсенбаев Балахазы Ибрайович, Ременцов Андрей Николаевич (KZ)(71)(73) Заявитель и патентовладелец: ИНСТИТУТ МЕХАНИКИ И МАШИНОВЕДЕНИЯ ИМ. АКАДЕМИКА У.А. ДЖОЛДАСБЕКОВА МОН РК; ДЖОЛДАСБЕКОВ СКАНДЕРБЕК УМИРБЕКОВИЧ; ЖУРСЕНБАЕВ БАЛАХАЗЫ ИБРАЙОВИЧ (KZ) Изобретение относится к нефтегазовому машиностроению, а именно к нефтепромысловым машинам и оборудованию, и может быть использовано в наземном механическом приводе штанговых скважинных насосных установок (ШСНУ) для добычи нефти. Известен четырехзвенный механизм второго класса привода станка-качалки (СК), содержащий кривошипно-шатунную пару и шарнирно соединенное с ней двуплечее коромысло-балансир, имеющее на переднем плече головку, снабженную гибким промежуточным элементом, соединяющим балансир с точкой подвеса колонны штанг ШСНУ (Молчанов Г.В., Молчанов А.Г. Машины и оборудования для добычи нефти и газа. М.: Недра, 1984, с. 136-138). Данный механизм применяется в наземном приводе СК для преобразования вращательного движения выходного звена трансмиссии возвратно-поступательное движение точки подвеса колонны штанг. Одновременно обеспечивается кинематическая связь уравновешивающего устройства с точкой подвеса штанг. Уравновешивающее устройство, в зависимости от способа уравновешивания в данном механизме,выполняется в виде грузов-противовесов, размещенных на балансире, на кривошипе, на балансире с кривошипом, на шатуне и на специальных приспособлениях типа "ложной качалки", представляющей собой двухповодковую группу, присоединенную шарнирно к балансиру, или зубчатой пары, вращающейся с частотой вдвое большей, чем частота вращения кривошипа. К недостаткам механизма относятся большая металлоемкость, большие габариты и, как следствие большая масса, что усугубляется применением тяжелых грузов-противовесов и массивного фундамента. Более того, главными недостатками рассматриваемого механизма привода СК являются невозможность реализации в нем требуемого закона движения точки подвеса колонны штанг и обеспечение благоприятных углов давления, так как размерные соотношения звеньев механизма ограничены и не дают возможности произвести их необходимый подбор, а также при увеличении хода подвеса штанг увеличиваются габариты. Задачей изобретения является создание механизма привода СК, который обеспечивал бы реализацию любого требуемого закона движения точки подвеса колонны штанг и эффективное уравновешивание нагрузки на привод. Технические результаты - снижение металлоемкости и уменьшение габарита привода СК. Это достигается тем, что в механизме привода станка-качалки, содержащем кривошипно-шатунную пару, стойку, опору балансира, двуплечий балансир со средним шарниром, передним плечом с грузом и задним плечом, играющим роль противовеса и выполненным с возможностью изменения длины, определяемой расстоянием от стойки балансира до точки соединения ее с шатуном, в механизме добавлен двуплечий шатун с проушиной в средней части, которая шарнирно соединена задним плечом двуплечего балансира и шатуном, при этом передним плечом двуплечий шатун соединен с точкой подвеса колонны штанг, а задним плечом шарнирно соединен посредством дополнительного коромысла со стойкой. Сущность изобретения поясняется кинематической схемой привода СК, представленной на чертеже. Механизм привода СК содержит кривошип 1, шатун 2, шарнирно соединенный с одной стороны к кривошипу 1, а с другой стороны - к проушине 3 двуплечего шатуна 4, а также к заднему плечу 5 двуплечего балансира 6. Балансир 6 средним шарниром 7 присоединен к опоре 8, а на переднем плече 9 балансира закреплен груз 10. На переднем плече 11 шатуна 4 шарнирно закреплена головка 12, а заднее плечо 13 шарнирно присоединено к коромыслу 14, причем коромысло 14 и кривошип шарнирно соединены со стойкой 15. Соотношения длин звеньев механизма подобраны так, что в течение одного цикла работы механизма привода СК длина заднего плеча балансира, зависящая от взаиморасположения звеньев 5, 2, меняется,обеспечивая, тем самым, длину плеча, прямо пропорциональную нагрузке на привод, и строго вертикальное перемещение головки 12. Механизм привода СК работает следующим образом. Крутящий момент передается от редуктора (на схеме не показано) к оси кривошипа 1. Вращение кривошипа 1 посредством шатуна 2 передается к проушине 3 двуплечего шатуна 4, а также к заднему плечу 5 двуплечего балансира 6, при этом заднее плечо 13 двуплечего шатуна 4 воздействует на коромысло дополнительно 14, что заставляет совершать заднее 5 и переднее 9 плечи двуплечего балансира 6 и дополнительное коромысло 14 возвратно-качательное движение по дугам, а головка 12,за которую крепятся колонна штанг, находящаяся на переднем плече 11 двуплечего шатуна 4, совершает прямолинейное возвратно-поступательное движение. Таким образом, предложенное изобретение значительно снижает металлоемкость механизма привода СК за счет уменьшения габаритов в 2 раза как по высоте, так и по длине, сохраняя длину хода головки, что делает его компактным и позволяет реализовывать требуемый вид закона прямолинейного движения головки подвеса колонны штанг самим механизмом, т.е. без использования специальных направляющих устройств на головке балансира. ФОРМУЛА ИЗОБРЕТЕНИЯ Механизм привода станка-качалки, содержащий кривошипно-шатунную пару, стойку, опору балансира, двуплечий балансир с передним плечом, на котором закреплен груз, и задним плечом, отличающийся тем, что содержит двуплечий шатун с проушиной в средней части, которая шарнирно соединена с задним плечом двуплечего балансира и шатуном, при этом передним плечом двуплечий шатун соединен с точкой подвеса колонны штанг, а задним плечом шарнирно соединен посредством дополнительного коромысла со стойкой.
МПК / Метки
МПК: F16H 21/16, F04B 47/02
Метки: привода, механизм, станка-качалки
Код ссылки
<a href="https://eas.patents.su/3-20608-mehanizm-privoda-stanka-kachalki.html" rel="bookmark" title="База патентов Евразийского Союза">Механизм привода станка-качалки</a>
Фиксирующий механизм бесконечной петли привода оградительной решетки
Номер патента: 4453
Опубликовано: 29.04.2004
Авторы: Коен-Ревид Моше, Лейн Джон Александр
МПК: E06B 9/18
Метки: бесконечной, фиксирующий, привода, петли, механизм, оградительной, решетки
Формула / Реферат:
1. Фиксирующий механизм бесконечной петли, содержащий (а) ведущее колесо, выполненное с возможностью оказывать сопротивление вращению при наличии внешней силы, стремящейся вращать его со скоростью, отличной от скорости, обеспечиваемой приводом; (б) бесконечную петлю, входящую во взаимодействие с ведущим колесом на первом участке бесконечной петли, причем бесконечная петля выполнена с возможностью приведения ее в движение ведущим колесом, с...
Автоматический стопорный механизм для кольцевого веретена прядильного станка
Номер патента: 12816
Опубликовано: 30.12.2009
Авторы: Конукоглу Хакан, Айдин Ахмет Гокхан
МПК: D01H 7/22
Метки: автоматический, механизм, станка, прядильного, кольцевого, стопорный, веретена
Формула / Реферат:
1. Автоматический стопорный механизм кольцевого веретена, который останавливает вращающееся веретено при обрыве пряжи, отличающийся тем, что содержит катушку магнитного поля, металлическую вставку (6) с ее верхушкой (14), блокирующий механизм (8 и 9), стопорный рычаг (7), главную соединительную часть (1) и соединительный компонент. 2. Автоматический стопорный механизм кольцевого веретена по п.1, отличающийся тем, что катушка магнитного поля...
Механизм установки дозы и привода, подходящий для использования в устройстве доставки лекарственного средства
Номер патента: 7763
Опубликовано: 29.12.2006
Авторы: Уимпенни Стивен, Виси Роберт Фредерик, Пламптр Дэвид Обри
МПК: A61M 5/315
Метки: привода, средства, дозы, лекарственного, использования, доставки, подходящий, устройстве, установки, механизм
Формула / Реферат:
1. Механизм установки дозы и привода для использования в устройстве доставки лекарственного средства, содержащий корпус; муфту установки дозы; шток поршня; приводную муфту, присоединенную посредством резьбы к штоку поршня; муфту возврата в исходное положение, расположенную между приводной муфтой и корпусом; и дисплей для отображения доз, отличающийся тем, что: a) при перемещении муфты установки дозы ко второму концу корпуса муфта возврата в...
Механизм зигзага для швейной машины
Номер патента: 5358
Опубликовано: 24.02.2005
Авторы: Трантина Татьяна Ивановна, Обозов Вячеслав Аркадьевич, Комаренко Григорий Алексеевич, Цаплин Владимир Михайлович, Захаров Александр Владимирович, Никитин Виктор Андреевич, Умяров Равиль Константинович
МПК: D05B 3/02
Метки: швейной, механизм, зигзага, машины
Формула / Реферат:
1. Механизм зигзага для швейной машины, содержащий блок копиров, кинематически связанный с главным валом, шарнирно установленный на корпусе зигзага и имеющий возможность перемещения вдоль оси копиров, толкатель, контактирующий с одним из копиров в блоке и кинематически связанный с рамкой игловодителя через взаимодействующий с сумматором зигзага шарнирно смонтированный двуплечий рычаг, отличающийся тем, что двуплечий рычаг шарнирно смонтирован на...
Шарнирно-рычажный механизм переменной структуры
Номер патента: 7709
Опубликовано: 29.12.2006
Авторы: Аканов Доолотбек Кусейинович, Тентиев Рысбек Жумабекович, Кидибаев Мустафа Мусаевич, Абдраимов Самудин, Иманбаев Аскар Асангазиевич
МПК: F16H 21/00, F16H 21/40
Метки: шарнирно-рычажный, переменной, механизм, структуры
Формула / Реферат:
1. Шарнирно-рычажный механизм переменной структуры, содержащий стойку, ведущий и ведомый кривошипы, два шатуна и коромысло, отличающийся тем, что ведомое звено двухкривошипного механизма посредством шатуна связано с коромыслом, причем звенья выполнены с возможностью выстраивания в одну линию на межопорной линии. 2. Механизм по п.1 отличающийся тем, что длины звеньев механизма удовлетворяют следующим условиям: l1 = l3 < l2 = l4 < l6 <...
Предыдущий патент: Способ получения овсяного напитка
Следующий патент: Имидазо[1,2-а]пиридин-2-илфенил производные для лечения рака
Случайный патент: Микробицидные композиции