Метод измерения положения рельсового пути
Формула / Реферат
1. Метод измерения положения рельсового пути по следующим друг за другом измерительным участкам (15), при котором при помощи образованной лазерным лучом (16) длинной хорды (17) как базовой прямой линии измерительной системы (9) регистрируют относительное положение рельсового пути, отличающийся тем, что измеряют заключенный между длинными хордами (17) двух следующих друг за другом измерительных участков (15) угол α, при этом угол α определяют посредством регистрирующей пространственные координаты длинных хорд (17) системы инерциальных измерений (19), а отдельные измерительные участки (15) при помощи соответствующих значений измерения углов объединяют в пространственную локальную картину.
2. Метод по п.1, отличающийся тем, что по нескольким следующим друг за другом измерительным участкам (15) вычисляют при помощи пространственных координат действительное положение рельсового пути, после чего соединяют выравнивающую дугу (10) для коррекции положения рельсового пути.
3. Метод по п.1, отличающийся тем, что параллельно с процессом измерения определяют положение относительно рельсового пути (3) расположенных сбоку от рельсового пути (3) опорных точек (6).

Текст
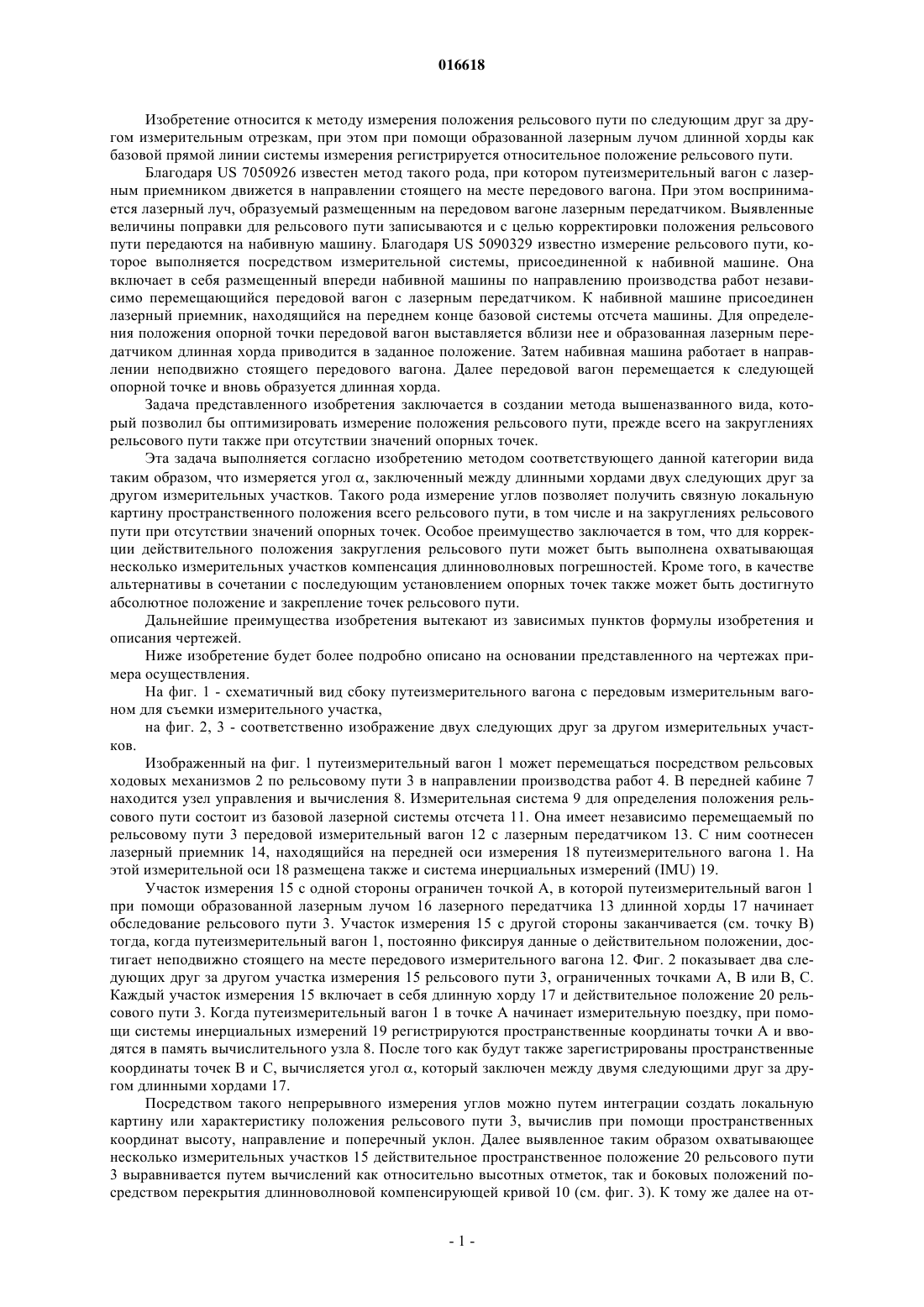
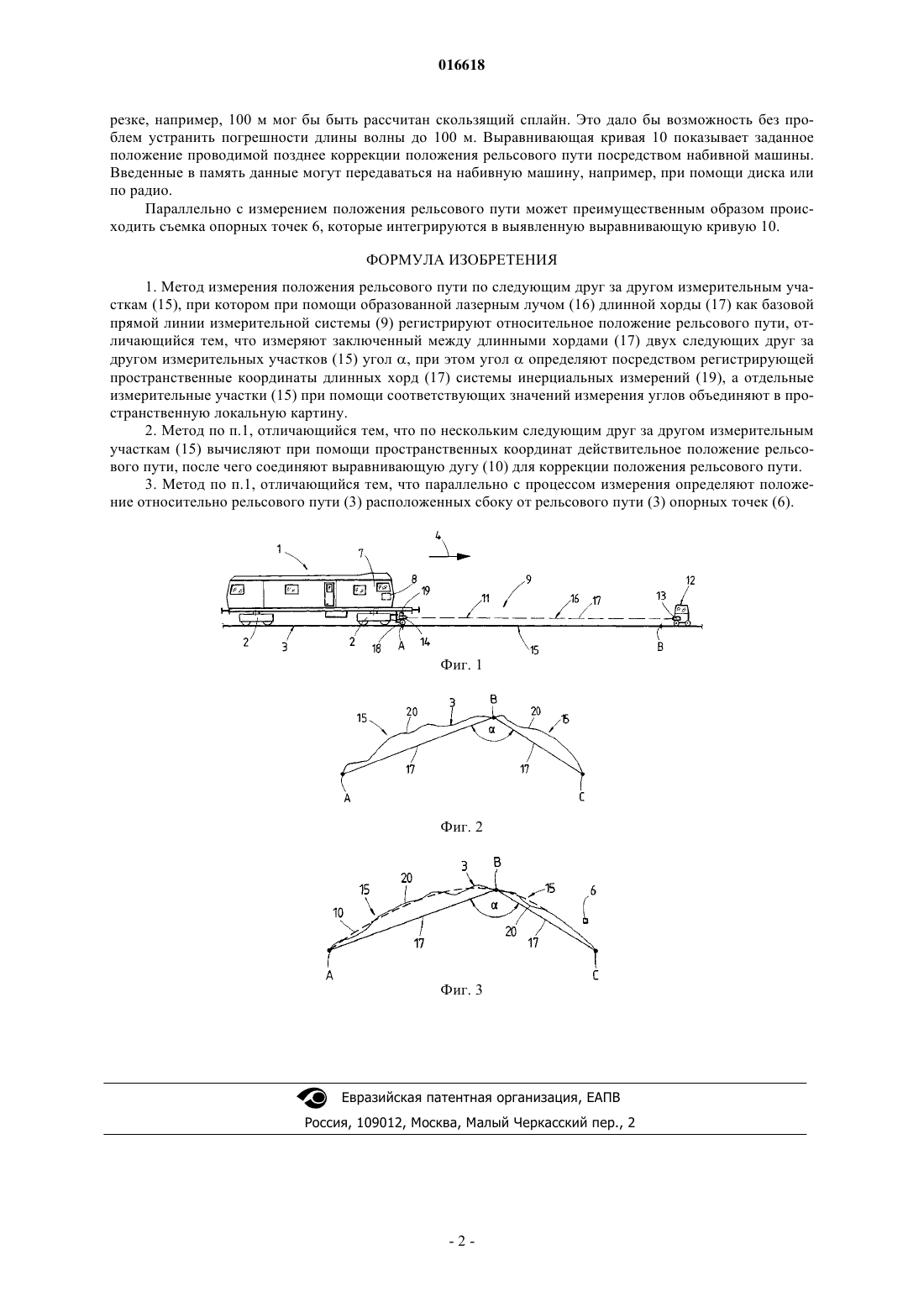
МЕТОД ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ Измерение положения рельсового пути происходит по следующим друг за другом измерительным участкам (15), при этом при помощи образованной лазерным лучом (16) длинной хорды (17) как базовой прямой линии измерительной системы (9) соответственно регистрируется относительное положение рельсового пути. При этом измеряется заключенный между длинными хордами(17) двух следующих друг за другом измерительных участков (15) угол с целью получения пространственной кривой, передающей действительное положение рельсового пути.(71)(73) Заявитель и патентовладелец: ФРАНЦ ПЛАССЕР БАНБАУМАШИНЕНИНДУСТРИГЕЗЕЛЬШАФТ М.Б.Х. 016618 Изобретение относится к методу измерения положения рельсового пути по следующим друг за другом измерительным отрезкам, при этом при помощи образованной лазерным лучом длинной хорды как базовой прямой линии системы измерения регистрируется относительное положение рельсового пути. Благодаря US 7050926 известен метод такого рода, при котором путеизмерительный вагон с лазерным приемником движется в направлении стоящего на месте передового вагона. При этом воспринимается лазерный луч, образуемый размещенным на передовом вагоне лазерным передатчиком. Выявленные величины поправки для рельсового пути записываются и с целью корректировки положения рельсового пути передаются на набивную машину. Благодаря US 5090329 известно измерение рельсового пути, которое выполняется посредством измерительной системы, присоединенной к набивной машине. Она включает в себя размещенный впереди набивной машины по направлению производства работ независимо перемещающийся передовой вагон с лазерным передатчиком. К набивной машине присоединен лазерный приемник, находящийся на переднем конце базовой системы отсчета машины. Для определения положения опорной точки передовой вагон выставляется вблизи нее и образованная лазерным передатчиком длинная хорда приводится в заданное положение. Затем набивная машина работает в направлении неподвижно стоящего передового вагона. Далее передовой вагон перемещается к следующей опорной точке и вновь образуется длинная хорда. Задача представленного изобретения заключается в создании метода вышеназванного вида, который позволил бы оптимизировать измерение положения рельсового пути, прежде всего на закруглениях рельсового пути также при отсутствии значений опорных точек. Эта задача выполняется согласно изобретению методом соответствующего данной категории вида таким образом, что измеряется угол , заключенный между длинными хордами двух следующих друг за другом измерительных участков. Такого рода измерение углов позволяет получить связную локальную картину пространственного положения всего рельсового пути, в том числе и на закруглениях рельсового пути при отсутствии значений опорных точек. Особое преимущество заключается в том, что для коррекции действительного положения закругления рельсового пути может быть выполнена охватывающая несколько измерительных участков компенсация длинноволновых погрешностей. Кроме того, в качестве альтернативы в сочетании с последующим установлением опорных точек также может быть достигнуто абсолютное положение и закрепление точек рельсового пути. Дальнейшие преимущества изобретения вытекают из зависимых пунктов формулы изобретения и описания чертежей. Ниже изобретение будет более подробно описано на основании представленного на чертежах примера осуществления. На фиг. 1 - схематичный вид сбоку путеизмерительного вагона с передовым измерительным вагоном для съемки измерительного участка,на фиг. 2, 3 - соответственно изображение двух следующих друг за другом измерительных участков. Изображенный на фиг. 1 путеизмерительный вагон 1 может перемещаться посредством рельсовых ходовых механизмов 2 по рельсовому пути 3 в направлении производства работ 4. В передней кабине 7 находится узел управления и вычисления 8. Измерительная система 9 для определения положения рельсового пути состоит из базовой лазерной системы отсчета 11. Она имеет независимо перемещаемый по рельсовому пути 3 передовой измерительный вагон 12 с лазерным передатчиком 13. С ним соотнесен лазерный приемник 14, находящийся на передней оси измерения 18 путеизмерительного вагона 1. На этой измерительной оси 18 размещена также и система инерциальных измерений (IMU) 19. Участок измерения 15 с одной стороны ограничен точкой А, в которой путеизмерительный вагон 1 при помощи образованной лазерным лучом 16 лазерного передатчика 13 длинной хорды 17 начинает обследование рельсового пути 3. Участок измерения 15 с другой стороны заканчивается (см. точку В) тогда, когда путеизмерительный вагон 1, постоянно фиксируя данные о действительном положении, достигает неподвижно стоящего на месте передового измерительного вагона 12. Фиг. 2 показывает два следующих друг за другом участка измерения 15 рельсового пути 3, ограниченных точками А, В или В, С. Каждый участок измерения 15 включает в себя длинную хорду 17 и действительное положение 20 рельсового пути 3. Когда путеизмерительный вагон 1 в точке А начинает измерительную поездку, при помощи системы инерциальных измерений 19 регистрируются пространственные координаты точки А и вводятся в память вычислительного узла 8. После того как будут также зарегистрированы пространственные координаты точек В и С, вычисляется угол , который заключен между двумя следующими друг за другом длинными хордами 17. Посредством такого непрерывного измерения углов можно путем интеграции создать локальную картину или характеристику положения рельсового пути 3, вычислив при помощи пространственных координат высоту, направление и поперечный уклон. Далее выявленное таким образом охватывающее несколько измерительных участков 15 действительное пространственное положение 20 рельсового пути 3 выравнивается путем вычислений как относительно высотных отметок, так и боковых положений посредством перекрытия длинноволновой компенсирующей кривой 10 (см. фиг. 3). К тому же далее на от-1 016618 резке, например, 100 м мог бы быть рассчитан скользящий сплайн. Это дало бы возможность без проблем устранить погрешности длины волны до 100 м. Выравнивающая кривая 10 показывает заданное положение проводимой позднее коррекции положения рельсового пути посредством набивной машины. Введенные в память данные могут передаваться на набивную машину, например, при помощи диска или по радио. Параллельно с измерением положения рельсового пути может преимущественным образом происходить съемка опорных точек 6, которые интегрируются в выявленную выравнивающую кривую 10. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Метод измерения положения рельсового пути по следующим друг за другом измерительным участкам (15), при котором при помощи образованной лазерным лучом (16) длинной хорды (17) как базовой прямой линии измерительной системы (9) регистрируют относительное положение рельсового пути, отличающийся тем, что измеряют заключенный между длинными хордами (17) двух следующих друг за другом измерительных участков (15) угол , при этом уголопределяют посредством регистрирующей пространственные координаты длинных хорд (17) системы инерциальных измерений (19), а отдельные измерительные участки (15) при помощи соответствующих значений измерения углов объединяют в пространственную локальную картину. 2. Метод по п.1, отличающийся тем, что по нескольким следующим друг за другом измерительным участкам (15) вычисляют при помощи пространственных координат действительное положение рельсового пути, после чего соединяют выравнивающую дугу (10) для коррекции положения рельсового пути. 3. Метод по п.1, отличающийся тем, что параллельно с процессом измерения определяют положение относительно рельсового пути (3) расположенных сбоку от рельсового пути (3) опорных точек (6).
МПК / Метки
МПК: E01B 35/00
Метки: метод, измерения, положения, пути, рельсового
Код ссылки
<a href="https://eas.patents.su/3-16618-metod-izmereniya-polozheniya-relsovogo-puti.html" rel="bookmark" title="База патентов Евразийского Союза">Метод измерения положения рельсового пути</a>
Машина для корректировки положения рельсового пути
Номер патента: 9930
Опубликовано: 28.04.2008
Авторы: Матцингер Эрвин, Тойрер Йозеф
МПК: E01B 27/17
Метки: машина, пути, положения, рельсового, корректировки
Формула / Реферат:
1. Машина для корректировки положения рельсового пути, состоящая из многосекционной машинной рамы (6), которой придаётся сателлитная рама (13), имеющая подбивочный агрегат (9), а также агрегат (12) для подъёма рельсового пути и перемещающаяся относительно машинной рамы (6) с помощью привода (31), и стабилизирующий агрегат (11), отличающаяся тем, что между сателлитной рамой (13) и стабилизирующим агрегатом (11) располагается второй подбивочный...
Метод и машина для уплотнения щебеночного балласта рельсового пути
Номер патента: 15919
Опубликовано: 30.12.2011
Авторы: Тойрер Йозеф, Вёргёттер Герберт
МПК: E01B 27/17, E01B 27/20
Метки: щебеночного, метод, пути, уплотнения, рельсового, машина, балласта
Формула / Реферат:
1. Метод уплотнения щебня щебеночного основания рельсового пути (3), при котором щебень при подъеме рельсового пути (3) сбрасывается и уплотняется, в то время как рельсовый путь (3) под действием дополнительной вертикальной нагрузки приводится в колебательное движения по горизонтали, отличающийся следующими этапами технологического процесса:a) рельсовый путь (3) после образования первого слоя щебеночного балласта (29) укладывается на него и под...
Машина и метод захватывания щебеночного балласта рельсового пути
Номер патента: 15980
Опубликовано: 30.01.2012
Авторы: Тойрер Йозеф, Вёргёттер Герберт
МПК: E01B 27/10
Метки: захватывания, щебеночного, метод, балласта, рельсового, машина, пути
Формула / Реферат:
1. Машина для захватывания щебеночного балласта рельсового пути с перемещаемой посредством рельсовых ходовых механизмов (4) рамой крепления (5) и вращающимся, имеющим бесконечную конвейерную цепь (9) экскаваторным устройством (7), образуемым двумя сходящимися в области цепного привода (8) продольными каналами (10) и поперечной ветвью цепи (11), которая соответственно соединяется с нижними концами (12) обоих продольных каналов (10), при этом...
Способ мониторинга параметров колесной пары и ее положения относительно рельсового пути
Номер патента: 12776
Опубликовано: 30.12.2009
Авторы: Юношев Сергей Павлович, Плотников Сергей Васильевич, Патерикин Владимир Иванович, Сотников Вадим Витальевич, Гуренко Владимир Михайлович, Кучинский Константин Иванович, Байбаков Андрей Николаевич
МПК: B61K 9/12
Метки: пути, мониторинга, способ, рельсового, параметров, пары, положения, относительно, колесной
Формула / Реферат:
1. Способ мониторинга параметров колесной пары и ее положения относительно рельсового пути, заключающийся в том, что облучают световым излучением рабочую поверхность колеса, принимают рассеянное излучение от точек на облучаемой рабочей поверхности колеса, измеряют координаты этих точек и по полученным координатам восстанавливают законченный профиль колеса, который сравнивают с эталонным профилем колеса колесной пары, отличающийся тем, что во...
Машина для приема и хранения скреплений рельсового пути, а также метод
Номер патента: 15062
Опубликовано: 29.04.2011
Авторы: Тойрер Йозеф, Бруннингер Манфред
МПК: E01B 29/24
Метки: машина, скреплений, хранения, приема, рельсового, пути, метод, также
Формула / Реферат:
1. Машина для приема и хранения скреплений (2) рельсового пути (3) с размещенным между двумя рельсовыми ходовыми механизмами (4) на станине (5) регулируемым по высоте гусеничным ходовым механизмом (24), а также с приспособлением (9) для приема рельсовых скреплений (2), отличающаяся следующими признаками:a) приспособление (9) для приема рельсовых скреплений (2) состоит из двух ленточных транспортеров (10), у каждого из которых имеется вращающийся...
Предыдущий патент: Устройство и способ для мультиплексирования с кодированным ортогональным частотным разделением
Следующий патент: Новые композиции на основе таксоидов
Случайный патент: Новые гидратные формы алендроната натрия, способы их получения и фармацевтические композиции