Система безопасности на железнодорожном транспорте
Формула / Реферат
1. Способ определения возможности столкновения поездов, содержащий этапы, на которых получают данные о положении поезда, передают упомянутые данные в контроллер, принимают упомянутые данные в контроллере, выполняют в контроллере с использованием принятых данных вычисления для прогнозирования положения поезда в будущее время и используют сведения о прогнозируемом будущем положении, чтобы определить, нужно ли предпринять какое-либо действие.
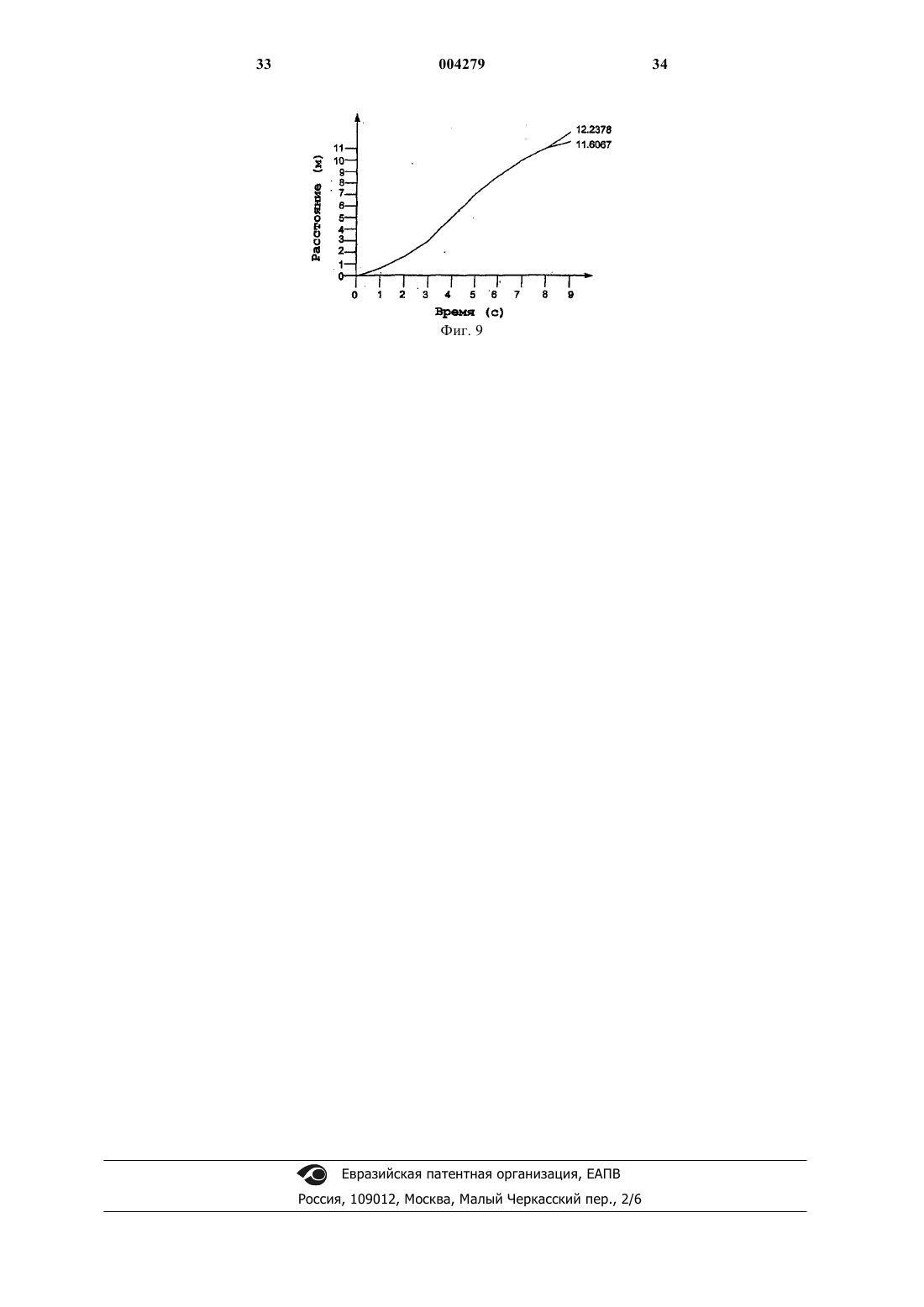
2. Способ по п.1, в котором на этапе вычисления из данных положения определяют векторы дифференциального положения, причем координаты векторов дифференциального положения выражают разность между двумя последовательными координатами вектора данных положения.
3. Способ по п.1 или 2, в котором вычисление включает обращение к базе данных сохраненных данных, относящихся к предыдущим перемещениям поезда, и идентификацию в базе данных векторов, подобных текущему вектору перемещения, причем текущий вектор перемещения является либо данными положения, либо векторами дифференциального положения, полученными из данных положения, и координаты векторов дифференциального положения выражают разность между двумя последовательными координатами вектора данных положения.
4. Способ по п.3, в котором база данных является базой данных сохраненных векторов дифференциального положения.
5. Способ по п.3, в котором база данных является базой данных сохраненных векторов положения.
6. Способ по любому из пп.3-5, в котором этап идентификации подобных векторов включает проверку, является ли модуль дополнительного вектора, полученного вычитанием потенциально подобного вектора, хранящегося в базе данных, из текущего вектора перемещения, меньшим, чем некоторое заданное положительное число.
7. Способ по любому из пп.3-6, в котором упомянутое вычисление включает считывание из базы данных прогнозирующих данных, причем прогнозирующие данные являются данными, записанными через конкретный период времени после упомянутых данных, идентифицированных как подобные.
8. Способ по п.7, дополнительно включающий прибавление одного и того же числа к каждой координате считанного вектора прогнозирующих данных, чтобы увеличить его на величину прибавляемого числа.
9. Способ по п.8, в котором прибавляемое число соответствует текущему положению поезда.
10. Способ по любому из пп.7-9, в котором считывается группа прогнозирующих данных, которая содержит максимальное значение и минимальное значение для любого данного конкретного периода времени.
11. Способ по п.10, в котором минимальное и максимальное значения выражают диапазон возможных положений поезда в упомянутое будущее время.
12. Способ по любому из предыдущих пунктов, в котором этапы получения данных, относящихся к положению поезда, и передачи данных в контроллер выполняются многократно для множества соответствующих поездов, и контроллер определяет возможность столкновения на основании прогноза будущего положения упомянутого множества поездов.
13. Способ по п.12, в котором этап прогнозирования будущего положения поезда является этапом, на котором прогнозируется множество интервалов будущих положений поезда для множества соответствующих поездов согласно способу по п.8, и этап определения возможности столкновения включает определение того, перекрываются ли, по меньшей мере, некоторые из множества прогнозируемых интервалов возможных положений поезда для упомянутого множества поездов.
14. Способ по любому из предыдущих пунктов, дополнительно включающий этап передачи сигнала предупреждения на поезд, если определено, что возможно столкновение.
15. Способ по любому из предыдущих пунктов, дополнительно включающий этап передачи сообщения остановки на поезд, если определено, что возможно столкновение.
16. Способ по п.15, дополнительно включающий этап автоматической остановки поезда в случае приема сообщения остановки от контроллера.
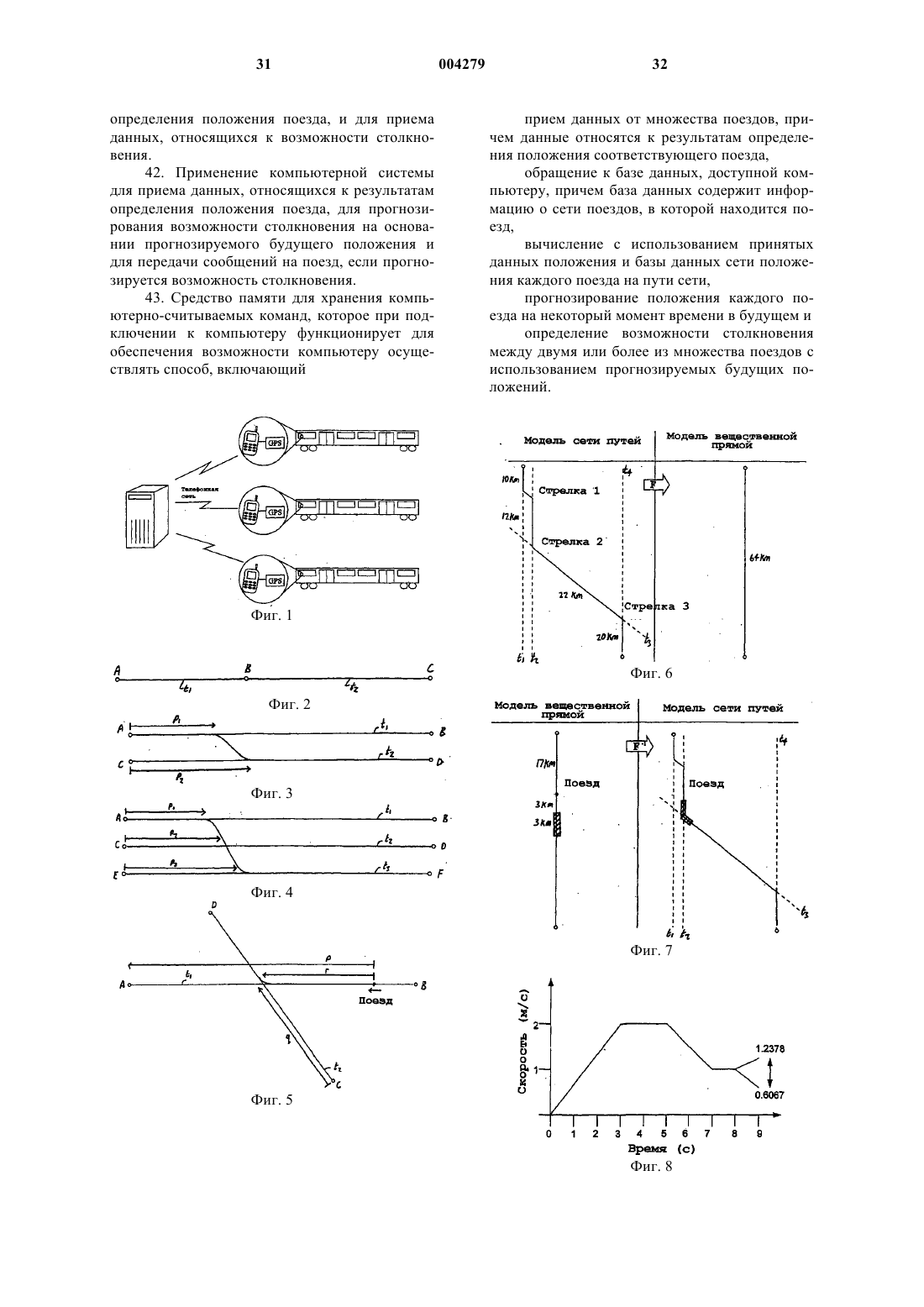
17. Способ по любому из предыдущих пунктов, в котором на этапе определения положения поезда используют сигналы, передаваемые спутниками ГСП.
18. Способ по любому из предыдущих пунктов, в котором этапы передачи и приема выполняют с использованием сети электронной связи.
19. Способ по любому из предыдущих пунктов, в котором этапы передачи и приема выполняют с использованием Интернет-протоколов в структуре экстрасети.
20. Способ по любому из предыдущих пунктов, в котором этап передачи данных в контроллер выполняют с использованием мобильного телефона.
21. Способ по любому из предыдущих пунктов, в котором полученные данные, относящиеся к положению поезда, преобразуют в данные положения согласно модели вещественной прямой.
22. Способ по п.21, в котором на этапе вычисления, осуществляемого на контроллере, прогнозируют будущее положение или диапазон будущих положений согласно модели вещественной прямой.
23. Способ по п.22, в котором прогнозируемое положение или диапазон прогнозируемых положений преобразуют в данные, выражающие положение или диапазон положений в сети путей.
24. Устройство для определения возможности столкновения поездов, содержащее первое средство, находящееся на поезде, и второе средство, находящееся вне поезда,
первое средство содержит средство определения положения для определения положения поезда, средство связи, оперативно подключаемое к средству определения положения, для передачи результата определения положения, полученного средством определения положения,
второе средство содержит средство приема для приема результата определения положения от средства связи, средство прогнозирования для прогнозирования будущего положения поезда на основании принятого результата определения положения и средство определения столкновения для определения возможности столкновения на основании результата, полученного средством прогнозирования.
25. Устройство по п.24, в котором второе средство дополнительно содержит базу данных сохраненных данных, относящихся к предыдущим перемещениям поезда.
26. Устройство по п.25, в котором средство прогнозирования содержит средство идентификации для идентификации сохраненных данных, подобных результатам определения положения или подобных данным, полученным из результатов определения положения.
27. Устройство по п.26, в котором средство прогнозирования дополнительно содержит средство извлечения для извлечения прогнозирующих данных, которые были первоначально получены для будущего времени по отношению к идентифицированным сохраненным данным.
28. Устройство по п.27, в котором средство извлечения предназначено для извлечения группы прогнозирующих данных, которая содержит минимальное и максимальное значения.
29. Устройство по п.28, в котором группа задает диапазон прогнозируемых будущих положений поезда.
30. Устройство по п.29, в котором средство определения столкновения использует множество групп прогнозирующих данных, полученных для разных поездов, и определяет, что возможно столкновение, когда по меньшей мере две группы перекрываются.
31. Устройство по любому из пп.24-30, в котором средство определения положения содержит приемник ГСП.
32. Устройство по любому из пп.24-31, в котором средство определения положения содержит мобильный телефон.
33. Устройство по любому из пп.24-32, в котором средство определения положения содержит портативный компьютер, снабженный модемом.
34. Устройство по любому из пп.24-33, дополнительно содержащее средство, входящее в состав второго средства, для передачи сообщения на первое средство.
35. Устройство по п.34, в котором сообщение содержит сообщение предупреждения.
36. Устройство по п.34, в котором сообщение содержит сообщение остановки.
37. Устройство по пп.24-36, дополнительно содержащее средство, входящее в состав второго средства, для передачи сигнала возобновления движения, когда определено, что остановленный поезд может безопасно начать движение.
38. Устройство по п.37, дополнительно содержащее средство, входящее в состав первого средства, для возобновления движения остановленного поезда по получении принятого сигнала возобновления движения.
39. Средство обеспечения безопасности поезда для использования в соответствии со способом по любому из пп.1-23, содержащее средство определения положения, средство связи, оперативно подключаемое к средству определения положения, для передачи результатов определения положения.
40. Контроллер для использования в соответствии со способом по любому из пп.1-23, содержащий средство приема для приема данных, относящихся к результатам определения положения поезда, средство прогнозирования для прогнозирования будущего положения поезда на основании принятых данных положения поезда и средство определения столкновения для определения возможности столкновения на основании прогнозируемого будущего положения.
41. Применение мобильного телефона для передачи данных, относящихся к результатам определения положения поезда, и для приема данных, относящихся к возможности столкновения.
42. Применение компьютерной системы для приема данных, относящихся к результатам определения положения поезда, для прогнозирования возможности столкновения на основании прогнозируемого будущего положения и для передачи сообщений на поезд, если прогнозируется возможность столкновения.
43. Средство памяти для хранения компьютерно-считываемых команд, которое при подключении к компьютеру функционирует для обеспечения возможности компьютеру осуществлять способ, включающий
прием данных от множества поездов, причем данные относятся к результатам определения положения соответствующего поезда,
обращение к базе данных, доступной компьютеру, причем база данных содержит информацию о сети поездов, в которой находится поезд,
вычисление с использованием принятых данных положения и базы данных сети положения каждого поезда на пути сети,
прогнозирование положения каждого поезда на некоторый момент времени в будущем и
определение возможности столкновения между двумя или более из множества поездов с использованием прогнозируемых будущих положений.

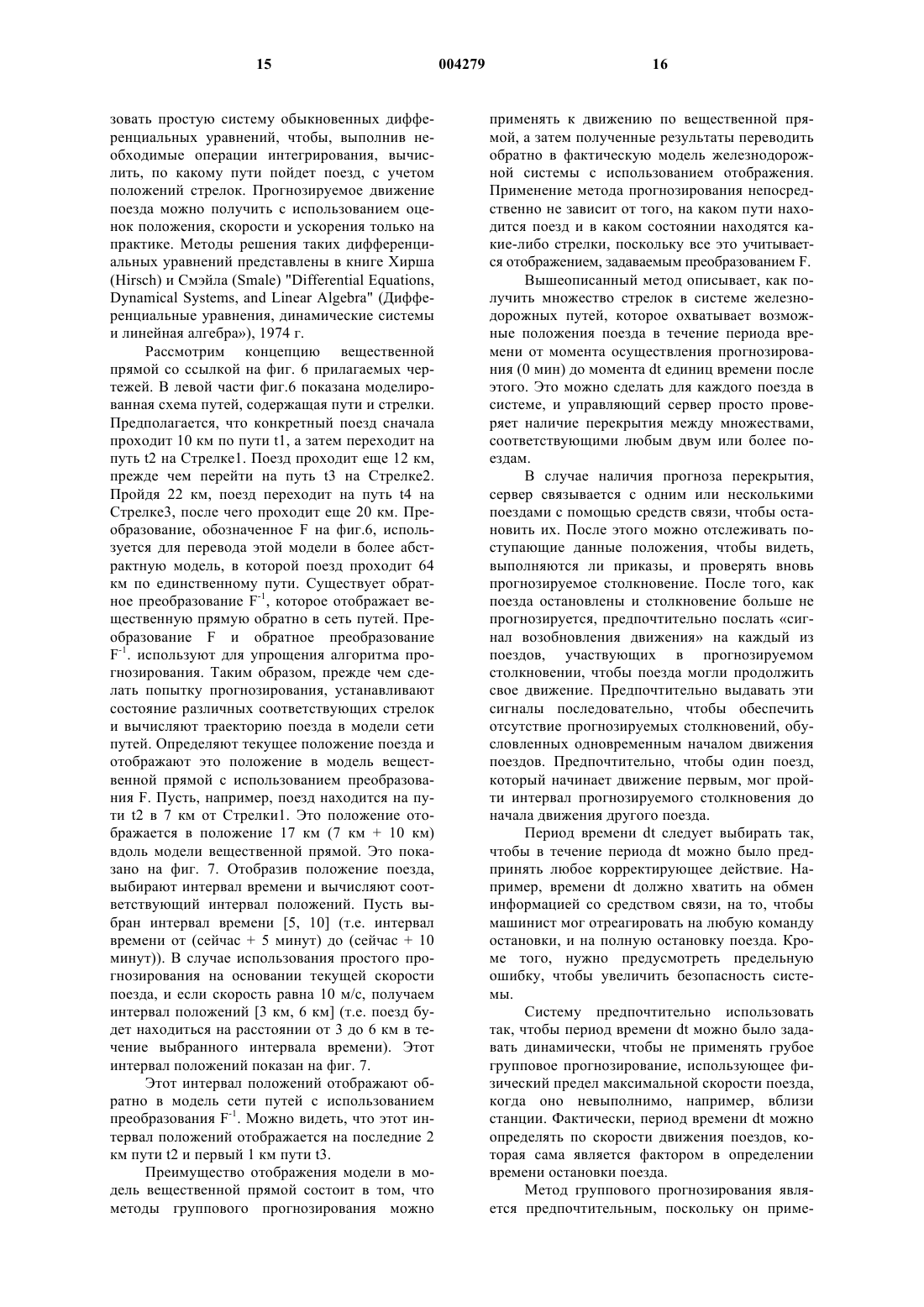
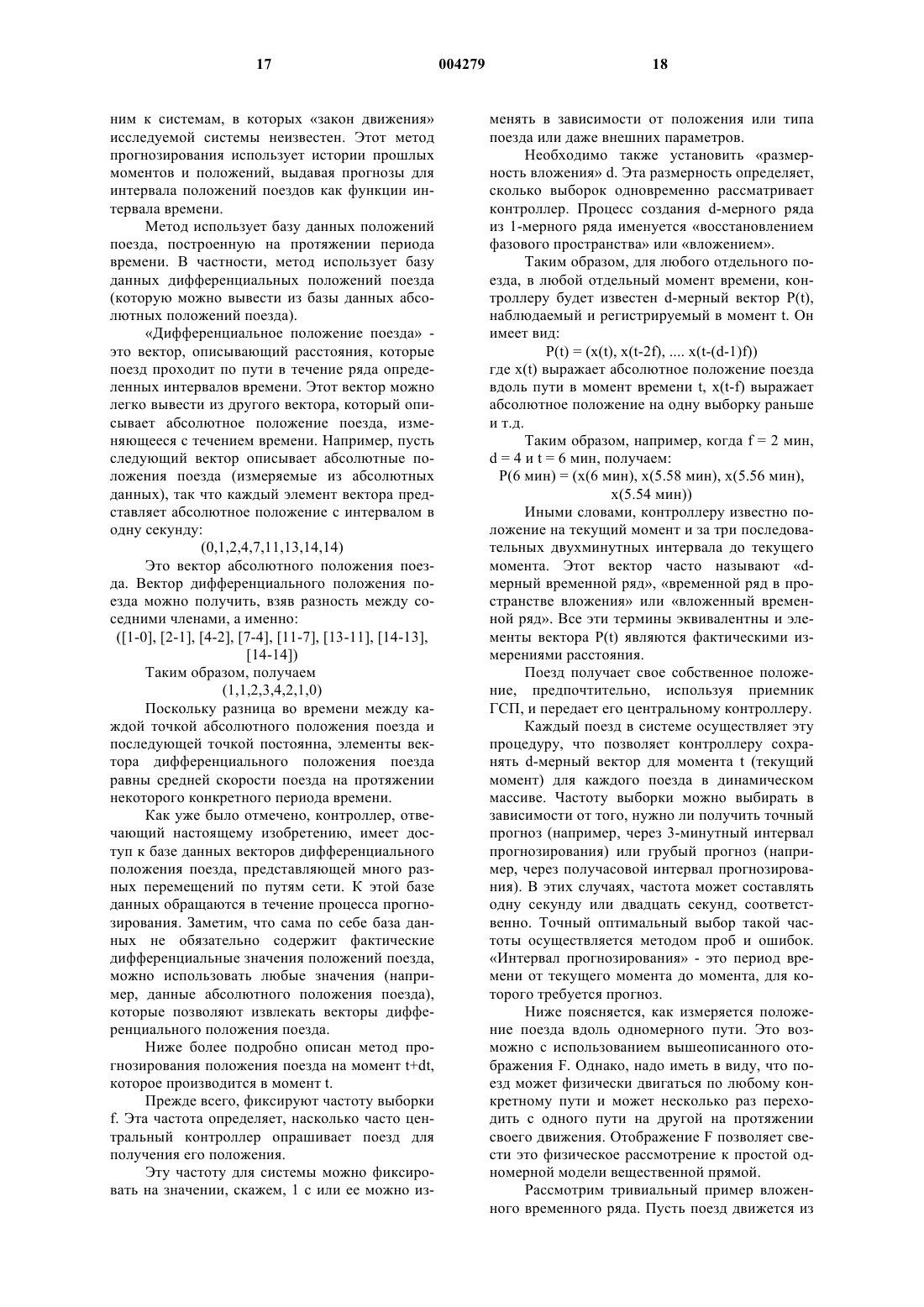
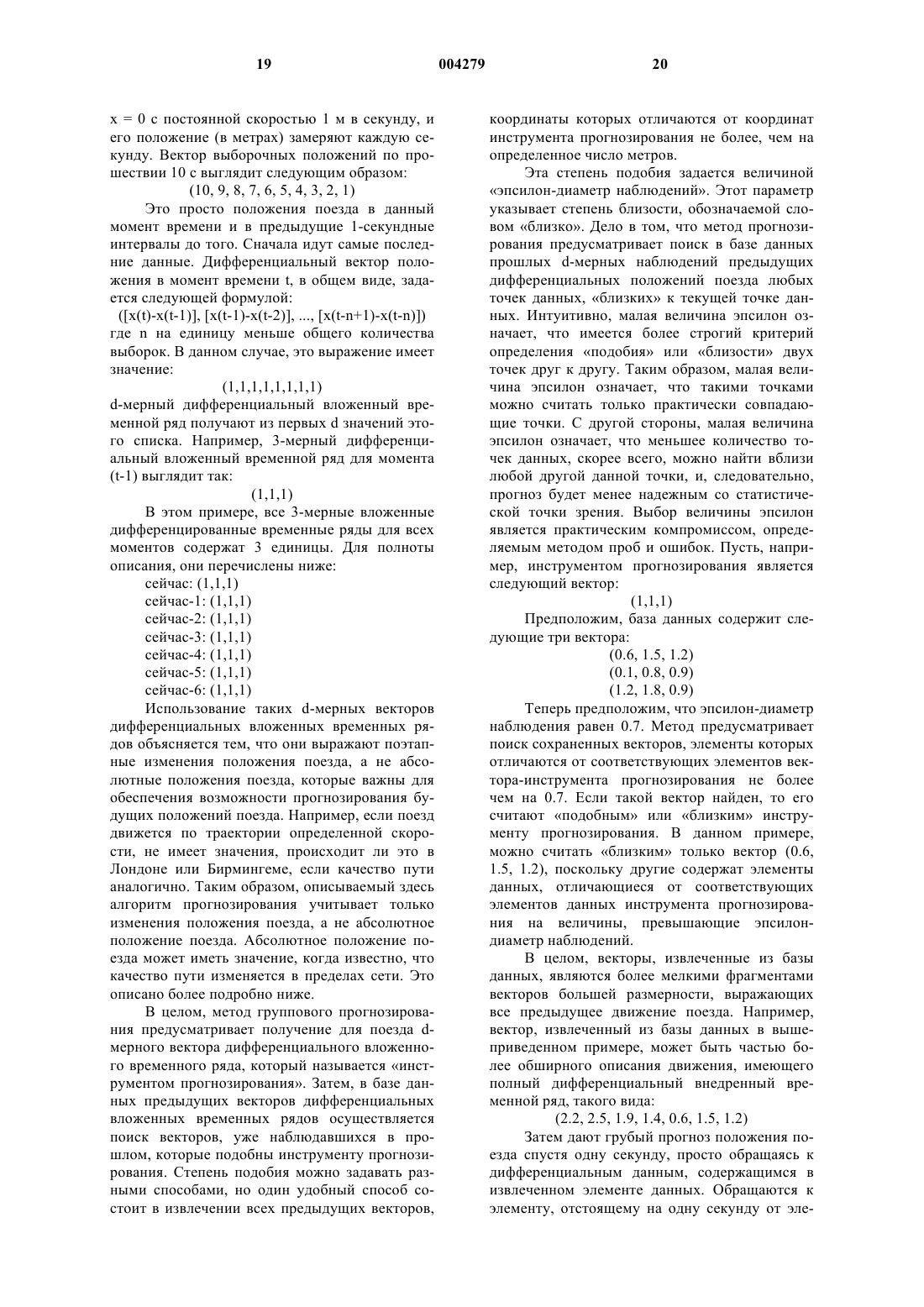
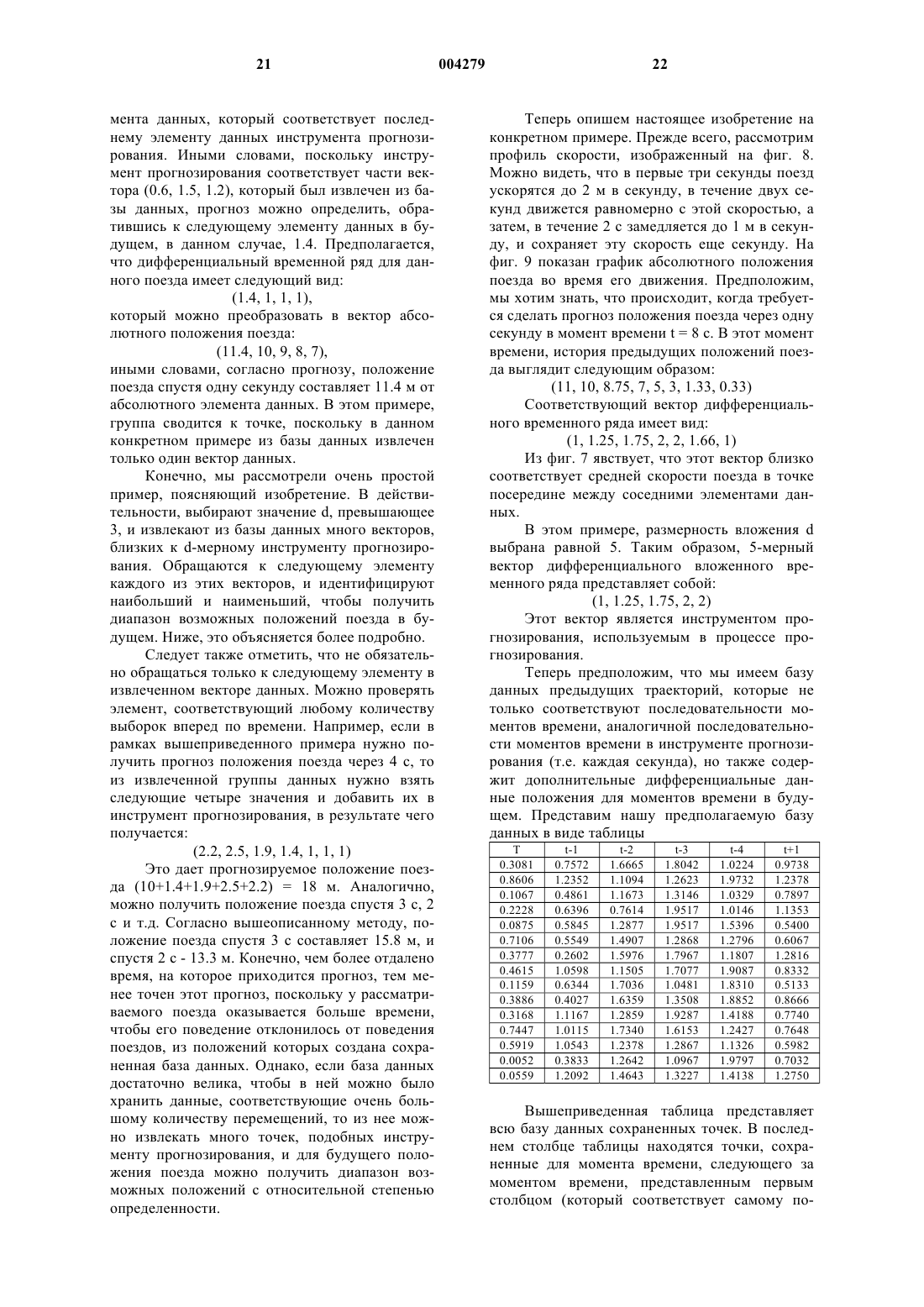
Текст
1 Настоящее изобретение, в целом, относится к области систем безопасности, применяемых на поездах и других железнодорожных транспортных средствах. В частности, настоящее изобретение относится к системе безопасности, в которой используется технология мобильной компьютеризированной связи для предотвращения крушений поездов и других катастроф. Система безопасности, отвечающая современному уровню техники, известна под названием автоматическая защита поезда (АЗП). В системе АЗП, передача информации в кабину машиниста осуществляется электронными средствами. В частности, на каждый поезд поступает информация о предельной скорости на путевом участке, по которому идет поезд, и, обычно, о предельной скорости на следующем путевом участке. В своем наиболее сложном виде, система АЗП связана с тормозной системой поезда,вызывая торможение, если машинист превышает предельную скорость, разрешенную на данном путевом участке. Система АЗП состоит из ряда полос ограничения скорости, которые появляются позади первого поезда на линии, так что скорость второго поезда на линии снижается поэтапно по мере его приближения. Эти полосы ограничения скорости перемещаются с первым поездом (либо плавно, либо скачкообразно при прохождении поезда между блокучастками), и разрешенная скорость возрастает от нуля в полосе, находящейся непосредственно позади поезда, до полной скорости на некотором расстоянии позади поезда. Размер полос и скорости выбирают в соответствии с дистанцией безопасного торможения любого поезда. В системе АЗП предусмотрено, что все поезда имеют одинаковую дистанцию безопасного торможения, что не соответствует действительности на стандартных магистральных железных дорогах. На таких железных дорогах существует много разных типов поездов, имеющих разные характеристики торможения. Основной недостаток АЗП состоит в том, что для ее установки требуется обновление инфраструктуры подвижного состава и путей, которое связано с очень большими затратами. Оборудование, необходимое для АЗП, также подвержено неблагоприятным погодным условиям, электронным помехам, механическим повреждениям, вандализму и хищению. В заявке WO 99/52091 раскрыта система для оповещения поездной бригады о близости других поездов. Просто, каждый поезд передает информацию о своем положении и способен принимать информацию, передаваемую другими поездами, находящихся поблизости, об их положении. Эти положения отображаются машинисту, который, при необходимости, может совершить надлежащие действия. Таким образом, система все же подвержена ошибкам машиниста и бесполезна вблизи станции, где дви 004279 2 жение настолько плотно, что информация о том,что поблизости находятся другие поезда, не имеет значения. Бортовые поездные компьютеры этой системы сами по себе не обладают методологией прогнозирования столкновения, но просто организуют описательную информацию для машиниста. Задачей настоящего изобретения является создание системы, которую можно установить в существующей железнодорожной инфраструктуре с меньшими затратами, чем АЗП. Кроме того, желательно обеспечить систему, способную автоматически прогнозировать столкновение и совершать автоматические действия для предотвращения такого столкновения. Соответственно, настоящее изобретение предусматривает способ определения возможности столкновения поездов, который содержит этапы, на которых получают данные, относящиеся к положению поезда, передают данные контроллеру, принимают данные в контроллере,осуществляют вычисление в контроллере с использованием данных для прогнозирования положения поезда на некоторый момент времени в будущем и, с использованием прогнозируемого будущего положения, определяют, нужно ли предпринять какие-либо действия для предотвращения столкновения с другим поездом или иным объектом. Кроме того, настоящее изобретение предусматривает устройство для определения возможности столкновения поездов, которое содержит первое средство, размещенное на поезде, и второе средство, размещенное вне поезда,причем первое средство содержит средство определения положения для определения положения поезда, средство связи, оперативно подключаемое к средству определения положения, для передачи результата определения положения,полученного средством определения положения, второе средство содержит средство приема для приема результата определения положения от средства связи, средство прогнозирования для прогнозирования будущего положения поезда на основании принятого результата определения положения и средство определения столкновения для определения возможности столкновения на основании результата, полученного средством прогнозирования. Кроме того, настоящее изобретение предусматривает использование мобильного телефона для передачи данных, относящихся к результатам определения положения поезда и для приема данных, относящихся к возможности столкновения. Кроме того, настоящее изобретение предусматривает использование компьютерной системы для приема данных, относящихся к результатам определения положения поезда, для прогнозирования будущего положения поезда с использованием принятых данных положения,для прогнозирования возможности столкнове 3 ния на основании прогнозируемого будущего положения и для передачи сообщений на поезд,если прогнозируется возможность столкновения. Настоящее изобретение также предусматривает средство памяти для хранения компьютерно-считываемых команд, подключение которого к подходящему компьютеру дает возможность компьютеру осуществлять следующий способ: принимать данные от совокупности поездов, причем данные относятся к результатам определения положения соответствующего поезда,обращаться к базе данных, доступной компьютеру, причем база данных содержит информацию о сети поездов, в которой находится поезд,вычислять, с использованием принятых данных положения и базы данных сети, положение каждого поезда на пути в упомянутой сети,прогнозировать положение каждого поезда на некоторый момент времени в будущем и определять возможность столкновения между двумя или более из множества поездов с использованием прогнозируемых будущих положений. Согласно предпочтительному варианту осуществления изобретения, из полученных данных положения выводят дифференциальные векторы положения, причем координаты этих дифференциальных векторов положения выражают разность двух последовательных координат вектора данных положения. Предпочтительно, дифференциальный вектор положения, выведенный из данных положения, сравнивают с рядом дифференциальных векторов положения,хранящихся в базе данных. Затем идентифицируют подобные сохраненные дифференциальные векторы положения. Альтернативно, сами данные положения можно сравнивать с другими данными положения, хранящимися в базе данных. Предпочтительно, два вектора определяют как подобные, если модуль третьего вектора,полученного вычитанием сохраненного вектора из текущего вектора, меньше некоторого заданного числа. Предпочтительно,вычисление также включает в себя извлечение прогнозируемых данных из базы данных, причем прогнозируемые данные являются данными, записанными через конкретный период времени после данных, которые были идентифицированы как подобные. Для преобразования прогнозируемых данных, которые могут иметь вид дифференциальных векторов положения, в полезные данные, может понадобиться прибавить смещение ко всем прогнозируемым данным, чтобы получить прогнозируемое положение поезда на пути. Преимущество использования дифференциальных векторов положения вместо самих 4 векторов положения состоит в том, что дифференциальные векторы положения не зависят от абсолютного положения поезда. Таким образом,дифференциальные векторы положения, описывающие предыдущие перемещения поезда по другим путям, можно, например, сохранять в базе данных и использовать для получения прогноза текущего перемещения поезда. Обычно, прогнозируемые данные содержат несколько векторов, извлеченных из базы данных, которые подобны текущему вектору перемещения. Этот диапазон извлеченных векторов имеет максимальное значение и минимальное значение для любого данного конкретного периода времени. Эти максимальное и минимальное значения можно использовать для задания диапазона возможных положений поезда в некоторый момент времени в будущем. Согласно предпочтительному варианту осуществления настоящего изобретения, вышеуказанный способ выполняется для нескольких поездов в сети, поэтому диапазон возможных будущих положений получают для каждого поезда. На этапе определения возможности столкновения предпочтительно определяют, перекрываются ли по меньшей мере некоторые из множества прогнозируемых интервалов возможных положений поезда для множества поездов. При обнаружении любого перекрытия требуется предпринять корректировку. Предпочтительно, согласно настоящему изобретению, полученные данные, относящиеся к положению поезда, преобразуют в данные положения вдоль модели вещественной прямой. Затем осуществляют вычисление прогнозируемых положений поезда вдоль модели вещественной прямой и результаты заменяют обратно на данные, выражающие фактические положения в сети путей. Преимущество состоит в том,что способ прогнозирования можно использовать независимо от физической топологии сети путей, которая определяется положением стрелок и т.д. Для более подробного описания изобретения рассмотрим неограничительные примеры со ссылкой на прилагаемые чертежи, на которых представлено следующее: фиг. 1 - схематичное представление основных признаков варианта осуществления настоящего изобретения; фиг. 2 - схема модели простой железнодорожной сети, содержащей три станции и два пути; фиг. 3 - схема модели другой простой железнодорожной сети, содержащей четыре станции и два пути; фиг. 4 - схема модели еще одной простой железнодорожной сети, содержащей шесть станций и три пути; фиг. 5 - схема модели сети, аналогичной сети, изображенной на фиг. 3, которая используется для описания способа прогнозирования 5 будущего положения поезда, отвечающего настоящему изобретению; фиг. 6 - схематичное представление соотношения между моделированной сетью путей и концепцией вещественной прямой; фиг. 7 - схематичное представление обратного соотношения между моделью вещественной прямой и моделью сети путей; фиг. 8 - график зависимости скорости от времени для отдельно взятого поезда; и фиг. 9 - соответствующий график зависимости расстояния от времени для того же поезда. Настоящее изобретение предусматривает,что в некотором центральном пункте отслеживают положения по меньшей мере активных поездов в конкретной сети. Для этого, на каждом поезде предусмотрены средства определения положения поезда и передачи этого положения в центральный пункт. На центральном пункте предусмотрены соответствующие средства анализа положений поездов и прогнозирования возможности или вероятности их столкновения. Средства, предусмотренные на центральном пункте, способны передавать по меньшей мере некоторым из поездов в сети сообщение о возможном или вероятном столкновении, чтобы можно было предпринять необходимые действия. На фиг. 1 изображена схема варианта осуществления изобретения. На фиг. 1 показаны только три поезда, которые призваны представлять все активные поезда в данной сети. Сеть можно задавать произвольно в виде той или иной группы путей. Альтернативно (и более обычно), ее можно задавать в виде группы путей, по которым движутся поезда, причем выбор путей осуществляется на основании по меньшей мере возможности того, что поезд, находящийся на одном пути, способен столкнуться с поездом,находящимся на другом или том же пути. Каждый поезд снабжен устройством связи,изображенным на фиг. 1 в виде мобильного телефона. Мобильный телефон способен связываться с центральным контроллером по сети связи, которая может включать в себя, например, сотовую телефонную сеть. Предпочтительно, мобильный телефон способен обмениваться данными непосредственно с центральным контроллером в виде цифровых сообщений. Каждый поезд также снабжен средством определения своего положения, либо относительного, по отношению к некоторому известному положению, либо абсолютного, по отношению к некоторой заданной оси. Предпочтительно, это средство содержит приемник ГСП (глобальной системы позиционирования). Средство определения положения поезда способно связываться с мобильным телефоном, что позволяет передавать положение поезда на центральный контроллер. Таким образом, центральный контроллер знает или может вычислить положение каж 004279 6 дого поезда в сети. Центральный контроллер может прогнозировать, насколько возможно столкновение. Это прогнозирование может основываться, например, на том, что поезд идет по сети на некотором расстоянии от другого поезда. Средство связи с центральным контроллером может иметь любой подходящий вид. Если используется мобильный телефон, предпочтительно, чтобы это был интеллектуальный мобильный телефон, который способен обрабатывать данные и имеет возможность связи с компьютером. Альтернативно, можно использовать PDA (персональный цифровой секретарь) со встроенным модемом или переносной компьютер, подключенный к мобильному телефону. Все эти устройства позволяют передавать цифровые данные по телефонной сети, что предпочтительно в отношении настоящего изобретения. Данные можно передавать по телефонной сети с использованием стандарта GSM (Глобальной системы мобильной связи) или WAP(протокол беспроводной связи), который является стандартом для подключения мобильных телефонов и других устройств к Интернету. Более подробные сведения о соответствующих устройствах можно найти в документе под названием "Mobile Commerce Report", Durlacher Research Limited, London 1999. В качестве средства определения положения поезда в пространстве предпочтительно использовать известную глобальную систему позиционирования. Эти средства могут просто содержать приемник для приема сигналов ГСП от спутников ГСП, и эти принятые сигналы можно передавать на центральный контроллер с помощью средств связи. Центральный контроллер может декодировать сигналы для определения местоположения поезда. Альтернативно,приемник ГСП на каждом поезде способен самостоятельно декодировать сигналы ГСП, что позволяет передавать с помощью средств связи данные, выражающие положение поезда в пространстве, в контроллер. Предпочтительно, приемник ГСП содержит коммерчески доступный приемник, который может выдавать положение на поверхности земли в виде последовательности данных. Можно использовать и другую известную технологию вычисления положения. Например,сигнал, передаваемый средством связи, могут принимать несколько близлежащих базовых станций, и время приема можно сравнивать, что позволяет вычислять положение поезда методом триангуляции. Центральный контроллер, предпочтительно, состоит из компьютерной системы, подключенной к телефонной сети с помощью модема или иного подходящего средства. Компьютерная система имеет доступ к базе данных, в которой хранится геометрическая модель железно 7 дорожной сети. Это дает возможность центральному контроллеру строить модель железнодорожной системы с использованием геометрической базы данных железнодорожной сети и полученных положений поезда. Это позволяет отслеживать поезда в процессе их движения по путям сети. Центральный контроллер, предпочтительно, также имеет доступ к базе данных,содержащей информацию об ожидаемой траектории поезда. Например, нередко две станции соединены двумя путями с путевыми участками в разных точках вдоль пути, в которых поезд может переходить на другой путь (именуемыми стрелками или стрелочными переводами). Ожидаемая траектория поезда - это информация о том, на каком пути ожидается нахождение поезда на разных расстояниях между двумя станциями. Например, конкретный поезд может находиться на пути 1 на протяжении 3 миль,затем перейти на путь 2 и пройти по нему 27 миль, после чего вернуться на путь 1 и пройти по нему 34 мили. Эта информация конструируется на основании текущего состояния стрелок в сети (дополнительная информация о том, что значит состояние стрелок, приведена ниже). Эта дополнительная информационная база данных позволяет центральному контроллеру определять, на каком пути находится тот или иной поезд, когда информация положения, передаваемая поездом, недостаточно точна для различения соседних путей. Однако эта дополнительная информация не требуется, если данные положения исключительно точны (настолько, что путь, на котором находится поезд, можно определить, сравнив данные положения с моделью железнодорожной сети). Современная коммерческая версия системы ГСП имеет точность 100 м, хотя планируемые новые коммерческие версии системы будут обладать точностью в пределах 4 м. Пусть, например, фактическая точка в пространстве приемника может отстоять от измеренной точки вплоть до 100 м. Это значит, что центральному контроллеру требуется построить диск диаметром 200 м, центром которого будет измеренное положение. Фактическое положение поезда находится где-то в пределах диска. Затем этот диск накладывают на модель железнодорожной сети и используют данные ожидаемой траектории, чтобы идентифицировать путь, на котором находится поезд. Затем можно идентифицировать участок пути (максимальная длина = 200 м), на котором находится головная часть поезда. Ошибка в сигнале коммерческой ГСП носит случайный характер, что дает возможность снизить или исключить ее с использованием стандартных процедур устранения шума. Большей степени точности можно добиться, если близлежащая базовая станция (положение которой известно) также принимает сигналы спутника ГСП, что позволяет вычислить и вывести 8 экспериментальным путем ошибку (которая является погрешностью смещения). Предпочтительно, средство связи и центральный контроллер связываются друг с другом через защищенную экстросеть. Экстросеть, это физически защищенная сеть, в которой используются технические стандарты IP (Интернет-протокола), но физически отделенная от открытого Интернета в целях безопасности и скорости передачи. В этом случае, центральный контроллер играет роль вебсервера, предоставляющего возможности Интернета. Каждое средство связи, размещенное на соответствующем поезде, способно заходить на конкретный веб-сайт, обеспечиваемый вебсервером, для передачи информации положения. Можно также загружать информацию с веб-сайта, но эта особенность является необязательной. Управляющий сервер, который выполняет различные необходимые вычисления и прогнозирование, оперативно подключается к вебсерверу. На практике, веб-сервер и управляющий сервер, предпочтительно, составляют единую компьютерную систему. Управляющий сервер имеет доступ к базе данных, где хранится геометрическая модель сети, и необязательной базе данных, где хранится информация об ожидаемой траектории поезда. Предпочтительно, связь осуществляется так, что информация о положении поезда поступает от каждого поезда на веб-сервер через регулярные интервалы времени, например, каждую секунду. Эта регулярность может быть фиксированной для всей системы или переменной, в зависимости от различных параметров системы железнодорожной сети. Например, информацию можно передавать более регулярно,когда поезд движется, чем когда он стоит. Альтернативно, информацию можно передавать более регулярно в областях с повышенной плотностью движения, где больше вероятность столкновения, чем в областях, содержащих один путь в открытой сельской местности. Перейдем к описанию структуры базы данных, где хранится геометрическая модель железнодорожной сети. Это описание носит исключительно иллюстративный характер, и настоящее изобретение охватывает всевозможные способы хранения данных о железнодорожной сети, которые позволяют отслеживать положения поездов и прогнозировать столкновения. В качестве примера, на фиг.2 показана простая модель двухпутной железнодорожной системы с тремя станциями. Станции обозначены А, В и С, а пути обозначены t1 и t2. Путь 1(t1) проложен между станцией А и станцией В, а путь 2 (t2) проложен между станцией В и станцией С. Путь t1 имеет длину 1000 м, а путь t2 имеет длину 500 м. В этом простом случае, модель, задающая пути, состоит только из множе 9 ства t1, t2, где t1 и t2 заданы следующим образом:t2 = В, С, [0, 500] Таким образом, модель содержит информацию о том, какие станции соединяет каждый путь и какое расстояние можно пройти по пути между станциями. Заметим, что система обозначений предполагает, что измерения начинаются с первой указанной станции и заканчиваются на второй указанной станции. Таким образом, станция А находится на расстоянии 0 м по пути 1, а станция В находится на расстоянии 1000 м по пути 1. Поезд, идущий из В в А по пути 1, движется в отрицательном направлении. Сами положения поездов моделируют в виде информации о том, на каком пути находится каждый из них, и расстояния каждого из них по пути. Например, поезд, находящийся на путиt1 посередине между станциями А, В (следовательно, в 500 м от станции А) можно смоделировать следующим образом: поезд 1 = (t1, 500) Эту информацию о положении поездов связывают с информацией о времени измерения положения. Поэтому информация изменяется с течением времени по мере перемещения поезда,так что, если поезд идет из А в В, то число 500 в вышеуказанной системе обозначений возрастает, пока не достигнет 1000 (в этот момент поезд находится на станции В). Если требуются уточненное прогнозирование движения поезда, то необходимо хранить информацию о том, где сходятся или пересекаются пути. В таких местах обычно имеется возможность того, что поезд, идущий по одному пути, либо переходит на другой путь, либо остается на том же пути. На фиг. 3 показан простой пример такой конфигурации путей. Согласно фиг. 3, станции А и В соединены путем t1, и станции С и D соединены путем t2. Пути соединены между собой на расстоянии р 1 от станции А по t1 и на расстоянии р 2 от станции С по t2. Поезд, идущий по пути t1 в направлении станции В, достигнув Стрелки 1, может либо остаться на пути t1, либо перейти на путь t2 и продолжить движение к станции D. Эта железнодорожная стрелка Стрелка 1 моделируется следующим образом: Стрелка 1 = t1, t2, (р 1, р 2) На фиг. 4 описана более сложная система стрелок. В этом примере рассматриваются три пути t1, t2 и t3. Поезд, идущий из А в В по путиt1, может либо остаться на пути t1, либо перейти на путь t3 в направлении станции F. В процессе перехода, поезд пересекает t2, но не может перейти на путь t2. В данном случае, стрелка (обозначенная как Стрелка 2) моделируется так: Стрелка 2 = t1, t2, t3, (p1, p2, р 3) где р 1, p2 и р 3 обозначают расстояния от трех станций А, С и Е по путям t1, t2 и t3, соответственно, на которых поезд может перейти с пути 10 Выше было описано, как моделируются положения путей, поездов и стрелок. Для полноты модели сетевой системы необходимо также определить состояние различных компонентов сети. Состояние железнодорожной системы,в общем случае, моделируется следующим набором данных: 1) состояние всех железнодорожных стрелок, указывающее, на какой путь перейдет поезд, достигнув стрелки на определенном пути. 2) положения всех активных поездов. В отношении состояния стрелок, на фиг. 3 показана система стрелки, соединяющая путь t1 и путь t2, которая называется Стрелкой 1. Состояние Стрелки 1 описывают в отношении того, что произойдет с поездом, достигшим Стрелки 1 на пути t1 из станции А. Из этого примера явствует, что состояние Стрелки 1 описывается простым элементом информации, указывающим, останется ли поезд на пути t1 или перейдет на путь t2. В целом, состояние стрелок описывается следующей системой обозначений: Стрелка 1, t1 (AB) t2 (CD) Вышеприведенное выражение указывает,что поезд, идущий по пути t1 в направлении от А к В, переходит на путь t2 в направлении станции D. Стрелки также имеют обратное действие,так что поезд, идущий из D в С по пути t2, переходит на путь t1 в направлении А. Иными словами, вышеприведенное выражение эквивалентно следующему: Стрелка 1, t2 (DC) t1, (BA) При альтернативном состоянии стрелок,поезд, идущий по пути t1 из А в В, остается на пути t1. Вышеописанная и проиллюстрированная на фиг. 3 Стрелка 1 не влияет на движение поезда из В или из С в направлении Стрелки 1, поскольку в этом направлении движения путь не расходится, и, следовательно, выбор возможных маршрутов отсутствует. Чтобы поезд, идущий из В в С, мог перейти на другой путь, нужно обеспечить другую стрелку и отдельно задать состояние перевода или отсутствия перевода на другой путь. Что касается состояния активных поездов,заметим, что активным называется поезд, который движется или стоит между двумя станциями на одном из путей. Поезд, стоящий в депо, не является активным. Состояние поезда, в целом,описывается тремя параметрами:a) положением поезда на текущий момент(время = сейчас), и на несколько равноотстоящих моментов времени в недалеком прошломb) скоростью поезда, описанной множеством прошедших моментов времени и соответствующими положениями поезда, иc) ускорением поезда, описанным множеством прошедших моментов времени и соответствующими положениями. Эти данные могут храниться в виде таблицы текущего и предыдущих положений поезда. Эти данные можно использовать для получения таблицы дифференциальных положений поезда,как описано позже. В действительности, для измерения требуется только одна таблица данных, поскольку данные скорости и ускорения можно определить из данных положения с помощью соответствующих алгоритмов дифференцирования. Когда состояние системы сети поездов установлено и текущее и предыдущие положения поезда, совместно с деталями относительно состояния стрелок, которые помогают прогнозировать траекторию поезда, известны, можно делать прогнозы относительно возможности и вероятности столкновения. Прогнозы можно использовать в целях, отличных от определения возможности столкновения. Например, способ, отвечающий настоящему изобретению, позволяет прогнозировать скорость поезда и определять вероятность того,что поезд превысит определенную предельную скорость на участке пути, на котором он, согласно прогнозу, должен находиться. В этом случае, а также в случае возможных столкновений, нужно предпринимать корректирующие действия, если прогнозируется катастрофа, которые, предпочтительно, заключаются в отправке на поезд сообщения, предписывающего снизить скорость поезда, в предупреждении машиниста или фактического сообщения дистанционного управления, связанного с тормозной системой поезда. Центральный управляющий сервер способен делать ряд прогнозов относительно будущего состояния всех активных поездов на основании текущего состояния всех активных поездов и положений стрелок. Предпочтительно использовать особый метод прогнозирования, известный под названием групповое прогнозирование. Этот метод прогнозирования опирается на информацию о предыдущих положениях одного и того же поезда или, возможно, поездов с аналогичными характеристиками в одной области или близких областях пути, и позволяет получить множество точек, в которых может находиться поезд в течение некоторого интервала времени в будущем, и, с помощью алгоритма обнаружения столкновения, можно проверить,перекрывается ли это множество с множеством точек, вычисленных для любого другого поезда в сети на тот же момент времени. Такие методы прогнозирования раскрыты в работе "Time Series: Forecasts in the Future and Understanding thePast" (Временные ряды: предсказание будущего и осмысление прошлого, труды симпозиума по передовым исследованиям НАТО по сравни 004279 12 тельным временным рядам, Вейгенд (Weigend) и Гершенфельд (Gershenfeld) (издатель. Традиционные методы прогнозирования,основанные либо на обыкновенных дифференциальных уравнениях (гладкие детерминированные системы), либо на методах линейной статистики (для вероятностных систем) не являются идеальными для прогнозирования столкновений в железнодорожных сетях. Предпочтительный способ, отвечающий настоящему изобретению, опирается на систему, в которой не нужно знать уравнения движения в явном виде. Когда система одновременно имеет как детерминированные, так и случайные компоненты, ее точное поведение в будущем, в принципе, невозможно прогнозировать. Однако возможно прогнозировать интервал (или группу) состояний, в которых система может оказаться в определенных границах вероятности. Эти границы вероятности можно и следует задавать настолько малыми, чтобы они представляли виртуальную определенность, что никаких столкновений не произойдет, исходя из предположения о том, что базовая модель поезда (т.е. физические характеристики поездов и их поведение, наблюдаемое в течение продолжительных периодов времени) является, в принципе, точной. Размер прогнозируемого интервала является функцией амплитуды и других характеристик шума в системе. Этот метод пригоден для целей настоящего изобретения, поскольку(а) не требует знания дифференциальных уравнений, описывающих идеальное или реальное движение поездов и (b) метод получения положений поездов содержит шум, не в последнюю очередь, за счет случайного смещения, свойственного сигналу ГСП. Метод дает интервал возможных значений будущего положения системы. Таким образом,метод обеспечивает не точный прогноз будущего, а целый интервал прогнозируемых положений. Вышеописанный метод прогнозирования связан с определенной фундаментальной теоремой, сформулированной Тейкензом (см. F.Dimension of Attractor"). [К вопросу о численном определении размерности аттрактора]. Эта теорема применима ко всем системам, которые,в принципе, можно описать на основании некоторого конечного множества наблюдений, которые все находятся в некотором конечном пространстве наблюдений. Иными словами, теорема применима к системам, которые, в принципе, имеют конечное число измерений и обладают тем свойством, что все наблюдения лежат в некотором компактном подмножестве этого пространства. Теорема утверждает, что, если известно исходное состояние системы, то, для прогнозирования поведения системы на некоторый момент времени в будущем, достаточно создать (почти) любое достаточно большое 13 множество наблюдений над системой на момент времени t. Это дает возможность использовать одномерный временной ряд наблюдений (например,относящихся к положениям поезда), чтобы реконструировать систему, эквивалентную фактической системе, просто используя наблюдение на текущий момент и определенное количество наблюдений в недалеком прошлом. Этот общий подход дает возможность использовать любой метод функциональной аппроксимации для получения схемы вычислений с целью прогнозирования. Для этого можно использовать такие средства, как локальные линейные прогнозы, нейронные сети (см. James[Элементарные волны и их применение],Springer 1992). Это групповое прогнозирование охватывает целый интервал соответствующих моментов времени [0,dt], где dt - некоторый интервал времени, выбранный оператором. Таким образом,для каждого интервала времени от 0 до dt производится вычисление соответствующего интервала положений поезда. В качестве очень простого примера, если интервал времени составляет 5 мин (dt = 5), и поезд движется с постоянной скоростью, равной 30 м/с, по единственному пути, то соответствующий прогнозируемый интервал положений (если прогнозирование основано на том, что скорость в будущем останется постоянной) составляет [0, 9000 м]. Причина в том, что поезд, движущийся со скоростью 30 м/с, пройдет в течение 5 мин 9000 м. Если модель прогнозирования дает прогноз, что два поезда будут иметь одинаковые или так или иначе перекрывающиеся интервалы положений на одном и том же пути в течение одного и того же периода времени, то это прогноз столкновения. В необязательном порядке,можно также прогнозировать опасное сближение (т.е. близко расположенные интервалы положений), чтобы встроить в систему фактор безопасности. Ясно, что при выборе более продолжительных интервалов времени, интервалы положений будут длиннее, и вероятность их перекрытия повышается. Однако более продолжительные интервалы времени дают менее точные интервалы положений, поскольку точность любого алгоритма прогнозирования снижается для событий в более отдаленном будущем. Используемая модель прогнозирования может принимать любой подходящий вид. Например, (как в вышеприведенном примере),можно предположить, что поезд движется с его нынешней скоростью по траектории, опреде 004279 14 ляемой железнодорожными стрелками, без ускорения или замедления. Это дает интервал положений поезда для выбранного интервала времени, причем интервалы положений всех поездов в одном и том же интервале времени подлежат сравнению для проверки наличия перекрытия. Прогнозирование верхней границы можно производить, предположив, что все поезда идут на максимальной скорости. Это дает интервал положений, длина которого больше или равна длине интервала, вычисленного с использованием точных значений скорости и ускорения поезда. На фиг. 5 показан случай, когда поезд идет по пути t1 от станции В к станции А и переходит на стрелке на путь t2 в направлении станцииD. Выделяют интервал времени dt и предполагают, что поезд идет с постоянной скоростью V в течение всего периода. Положение поезда на момент осуществления прогнозирования выражается как (t1, р), т.е. поезд находится на расстоянии р от станции А, и положение стрелки задается в виде: Стрелка 1 = t1, t2, (r, q) где r и q - расстояния Стрелки 1 вдоль путей t1 иt2, соответственно. Если в течение интервала dt поезд остается исключительно на пути t1 (т.е. (р-r)/Vdt), то интервал положений поезда составляет Поезд 1 = [р, (p-Vdt)] Если (р-r)/Vdt, то поезд переходит на другой путь (полагаем, что состояние Стрелки 1 представляет собой Стрелка 1, t1 (BA) t2(CD, и интервал положений составляет Поезд 1 = [р, r, t1], [q, q+V(dt-(р-r)/V), t2] Рассмотрим пример, когда поезд движется со скоростью 30 м/с и находится в 2.7 км от Стрелки 1, при этом dt = 3 мин, и пусть р = 8 км и q = 4 км. В данном случае, (р-r) = 4 км и V = 30 м/с, таким образом, (р-r)/V = 2700/30 = 90 с = 1.5 минdt. Таким образом, поезд перейдет на другой путь. Интервал для поезда 1 составляет Поезд 1 = [8000, 5300, t1], [4000, 4000+30(180(2700/30, t2] = [8000, 5300, t1], [4000, 6700, t2] Интервал для поезда 1 в течение следующих 3 мин составляет, таким образом, от 8 км до 5.3 км на пути t1 и от 4 км до 6.7 км на путиt2. Согласно предпочтительному способу,учитывают траекторию поезда, которая имеет место на вещественной прямой, обозначенную путями, по которым идет поезд (которые определяются положением стрелок). Предпочтительный алгоритм прогнозирования использует метод группового прогнозирования для получения диапазона возможных положений на этой вещественной прямой. Фактические положения можно определить с использованием обратной функции отображения. В качестве альтернативы групповому прогнозированию, можно исполь 15 зовать простую систему обыкновенных дифференциальных уравнений, чтобы, выполнив необходимые операции интегрирования, вычислить, по какому пути пойдет поезд, с учетом положений стрелок. Прогнозируемое движение поезда можно получить с использованием оценок положения, скорости и ускорения только на практике. Методы решения таких дифференциальных уравнений представлены в книге Хирша(Hirsch) и Смэйла (Smale) "Differential Equations,Dynamical Systems, and Linear Algebra" (Дифференциальные уравнения, динамические системы и линейная алгебра), 1974 г. Рассмотрим концепцию вещественной прямой со ссылкой на фиг. 6 прилагаемых чертежей. В левой части фиг.6 показана моделированная схема путей, содержащая пути и стрелки. Предполагается, что конкретный поезд сначала проходит 10 км по пути t1, а затем переходит на путь t2 на Стрелке 1. Поезд проходит еще 12 км,прежде чем перейти на путь t3 на Стрелке 2. Пройдя 22 км, поезд переходит на путь t4 на Стрелке 3, после чего проходит еще 20 км. Преобразование, обозначенное F на фиг.6, используется для перевода этой модели в более абстрактную модель, в которой поезд проходит 64 км по единственному пути. Существует обратное преобразование F-1, которое отображает вещественную прямую обратно в сеть путей. Преобразование F и обратное преобразованиеF-1. используют для упрощения алгоритма прогнозирования. Таким образом, прежде чем сделать попытку прогнозирования, устанавливают состояние различных соответствующих стрелок и вычисляют траекторию поезда в модели сети путей. Определяют текущее положение поезда и отображают это положение в модель вещественной прямой с использованием преобразования F. Пусть, например, поезд находится на пути t2 в 7 км от Стрелки 1. Это положение отображается в положение 17 км (7 км + 10 км) вдоль модели вещественной прямой. Это показано на фиг. 7. Отобразив положение поезда,выбирают интервал времени и вычисляют соответствующий интервал положений. Пусть выбран интервал времени [5, 10] (т.е. интервал времени от (сейчас + 5 минут) до (сейчас + 10 минут. В случае использования простого прогнозирования на основании текущей скорости поезда, и если скорость равна 10 м/с, получаем интервал положений [3 км, 6 км] (т.е. поезд будет находиться на расстоянии от 3 до 6 км в течение выбранного интервала времени). Этот интервал положений показан на фиг. 7. Этот интервал положений отображают обратно в модель сети путей с использованием преобразования F-1. Можно видеть, что этот интервал положений отображается на последние 2 км пути t2 и первый 1 км пути t3. Преимущество отображения модели в модель вещественной прямой состоит в том, что методы группового прогнозирования можно 16 применять к движению по вещественной прямой, а затем полученные результаты переводить обратно в фактическую модель железнодорожной системы с использованием отображения. Применение метода прогнозирования непосредственно не зависит от того, на каком пути находится поезд и в каком состоянии находятся какие-либо стрелки, поскольку все это учитывается отображением, задаваемым преобразованием F. Вышеописанный метод описывает, как получить множество стрелок в системе железнодорожных путей, которое охватывает возможные положения поезда в течение периода времени от момента осуществления прогнозирования (0 мин) до момента dt единиц времени после этого. Это можно сделать для каждого поезда в системе, и управляющий сервер просто проверяет наличие перекрытия между множествами,соответствующими любым двум или более поездам. В случае наличия прогноза перекрытия,сервер связывается с одним или несколькими поездами с помощью средств связи, чтобы остановить их. После этого можно отслеживать поступающие данные положения, чтобы видеть,выполняются ли приказы, и проверять вновь прогнозируемое столкновение. После того, как поезда остановлены и столкновение больше не прогнозируется, предпочтительно послать сигнал возобновления движения на каждый из поездов, участвующих в прогнозируемом столкновении, чтобы поезда могли продолжить свое движение. Предпочтительно выдавать эти сигналы последовательно, чтобы обеспечить отсутствие прогнозируемых столкновений, обусловленных одновременным началом движения поездов. Предпочтительно, чтобы один поезд,который начинает движение первым, мог пройти интервал прогнозируемого столкновения до начала движения другого поезда. Период времени dt следует выбирать так,чтобы в течение периода dt можно было предпринять любое корректирующее действие. Например, времени dt должно хватить на обмен информацией со средством связи, на то, чтобы машинист мог отреагировать на любую команду остановки, и на полную остановку поезда. Кроме того, нужно предусмотреть предельную ошибку, чтобы увеличить безопасность системы. Систему предпочтительно использовать так, чтобы период времени dt можно было задавать динамически, чтобы не применять грубое групповое прогнозирование, использующее физический предел максимальной скорости поезда,когда оно невыполнимо, например, вблизи станции. Фактически, период времени dt можно определять по скорости движения поездов, которая сама является фактором в определении времени остановки поезда. Метод группового прогнозирования является предпочтительным, поскольку он приме 17 ним к системам, в которых закон движения исследуемой системы неизвестен. Этот метод прогнозирования использует истории прошлых моментов и положений, выдавая прогнозы для интервала положений поездов как функции интервала времени. Метод использует базу данных положений поезда, построенную на протяжении периода времени. В частности, метод использует базу данных дифференциальных положений поезда(которую можно вывести из базы данных абсолютных положений поезда). Дифференциальное положение поезда это вектор, описывающий расстояния, которые поезд проходит по пути в течение ряда определенных интервалов времени. Этот вектор можно легко вывести из другого вектора, который описывает абсолютное положение поезда, изменяющееся с течением времени. Например, пусть следующий вектор описывает абсолютные положения поезда (измеряемые из абсолютных данных), так что каждый элемент вектора представляет абсолютное положение с интервалом в одну секунду:(0,1,2,4,7,11,13,14,14) Это вектор абсолютного положения поезда. Вектор дифференциального положения поезда можно получить, взяв разность между соседними членами, а именно:(1,1,2,3,4,2,1,0) Поскольку разница во времени между каждой точкой абсолютного положения поезда и последующей точкой постоянна, элементы вектора дифференциального положения поезда равны средней скорости поезда на протяжении некоторого конкретного периода времени. Как уже было отмечено, контроллер, отвечающий настоящему изобретению, имеет доступ к базе данных векторов дифференциального положения поезда, представляющей много разных перемещений по путям сети. К этой базе данных обращаются в течение процесса прогнозирования. Заметим, что сама по себе база данных не обязательно содержит фактические дифференциальные значения положений поезда,можно использовать любые значения (например, данные абсолютного положения поезда),которые позволяют извлекать векторы дифференциального положения поезда. Ниже более подробно описан метод прогнозирования положения поезда на момент t+dt,которое производится в момент t. Прежде всего, фиксируют частоту выборкиf. Эта частота определяет, насколько часто центральный контроллер опрашивает поезд для получения его положения. Эту частоту для системы можно фиксировать на значении, скажем, 1 с или ее можно из 004279 18 менять в зависимости от положения или типа поезда или даже внешних параметров. Необходимо также установить размерность вложения d. Эта размерность определяет,сколько выборок одновременно рассматривает контроллер. Процесс создания d-мерного ряда из 1-мерного ряда именуется восстановлением фазового пространства или вложением. Таким образом, для любого отдельного поезда, в любой отдельный момент времени, контроллеру будет известен d-мерный вектор P(t),наблюдаемый и регистрируемый в момент t. Он имеет вид:P(t) = (x(t), x(t-2f),x(t-(d-1)f где x(t) выражает абсолютное положение поезда вдоль пути в момент времени t, x(t-f) выражает абсолютное положение на одну выборку раньше и т.д. Таким образом, например, когда f = 2 мин,d = 4 и t = 6 мин, получаем: Р(6 мин) = (х(6 мин), х(5.58 мин), х(5.56 мин),х(5.54 мин Иными словами, контроллеру известно положение на текущий момент и за три последовательных двухминутных интервала до текущего момента. Этот вектор часто называют dмерный временной ряд, временной ряд в пространстве вложения или вложенный временной ряд. Все эти термины эквивалентны и элементы вектора P(t) являются фактическими измерениями расстояния. Поезд получает свое собственное положение, предпочтительно, используя приемник ГСП, и передает его центральному контроллеру. Каждый поезд в системе осуществляет эту процедуру, что позволяет контроллеру сохранять d-мерный вектор для момента t (текущий момент) для каждого поезда в динамическом массиве. Частоту выборки можно выбирать в зависимости от того, нужно ли получить точный прогноз (например, через 3-минутный интервал прогнозирования) или грубый прогноз (например, через получасовой интервал прогнозирования). В этих случаях, частота может составлять одну секунду или двадцать секунд, соответственно. Точный оптимальный выбор такой частоты осуществляется методом проб и ошибок. Интервал прогнозирования - это период времени от текущего момента до момента, для которого требуется прогноз. Ниже поясняется, как измеряется положение поезда вдоль одномерного пути. Это возможно с использованием вышеописанного отображения F. Однако, надо иметь в виду, что поезд может физически двигаться по любому конкретному пути и может несколько раз переходить с одного пути на другой на протяжении своего движения. Отображение F позволяет свести это физическое рассмотрение к простой одномерной модели вещественной прямой. Рассмотрим тривиальный пример вложенного временного ряда. Пусть поезд движется из 19 х = 0 с постоянной скоростью 1 м в секунду, и его положение (в метрах) замеряют каждую секунду. Вектор выборочных положений по прошествии 10 с выглядит следующим образом:(10, 9, 8, 7, 6, 5, 4, 3, 2, 1) Это просто положения поезда в данный момент времени и в предыдущие 1-секундные интервалы до того. Сначала идут самые последние данные. Дифференциальный вектор положения в момент времени t, в общем виде, задается следующей формулой:([x(t)-x(t-1)], [x(t-1)-x(t-2)], , [x(t-n+1)-x(t-n)]) где n на единицу меньше общего количества выборок. В данном случае, это выражение имеет значение:d-мерный дифференциальный вложенный временной ряд получают из первых d значений этого списка. Например, 3-мерный дифференциальный вложенный временной ряд для момента(1,1,1) В этом примере, все 3-мерные вложенные дифференцированные временные ряды для всех моментов содержат 3 единицы. Для полноты описания, они перечислены ниже: сейчас: (1,1,1) сейчас-1: (1,1,1) сейчас-2: (1,1,1) сейчас-3: (1,1,1) сейчас-4: (1,1,1) сейчас-5: (1,1,1) сейчас-6: (1,1,1) Использование таких d-мерных векторов дифференциальных вложенных временных рядов объясняется тем, что они выражают поэтапные изменения положения поезда, а не абсолютные положения поезда, которые важны для обеспечения возможности прогнозирования будущих положений поезда. Например, если поезд движется по траектории определенной скорости, не имеет значения, происходит ли это в Лондоне или Бирмингеме, если качество пути аналогично. Таким образом, описываемый здесь алгоритм прогнозирования учитывает только изменения положения поезда, а не абсолютное положение поезда. Абсолютное положение поезда может иметь значение, когда известно, что качество пути изменяется в пределах сети. Это описано более подробно ниже. В целом, метод группового прогнозирования предусматривает получение для поезда dмерного вектора дифференциального вложенного временного ряда, который называется инструментом прогнозирования. Затем, в базе данных предыдущих векторов дифференциальных вложенных временных рядов осуществляется поиск векторов, уже наблюдавшихся в прошлом, которые подобны инструменту прогнозирования. Степень подобия можно задавать разными способами, но один удобный способ состоит в извлечении всех предыдущих векторов, 004279 20 координаты которых отличаются от координат инструмента прогнозирования не более, чем на определенное число метров. Эта степень подобия задается величиной эпсилон-диаметр наблюдений. Этот параметр указывает степень близости, обозначаемой словом близко. Дело в том, что метод прогнозирования предусматривает поиск в базе данных прошлых d-мерных наблюдений предыдущих дифференциальных положений поезда любых точек данных, близких к текущей точке данных. Интуитивно, малая величина эпсилон означает, что имеется более строгий критерий определения подобия или близости двух точек друг к другу. Таким образом, малая величина эпсилон означает, что такими точками можно считать только практически совпадающие точки. С другой стороны, малая величина эпсилон означает, что меньшее количество точек данных, скорее всего, можно найти вблизи любой другой данной точки, и, следовательно,прогноз будет менее надежным со статистической точки зрения. Выбор величины эпсилон является практическим компромиссом, определяемым методом проб и ошибок. Пусть, например, инструментом прогнозирования является следующий вектор:(1,1,1) Предположим, база данных содержит следующие три вектора:(1.2, 1.8, 0.9) Теперь предположим, что эпсилон-диаметр наблюдения равен 0.7. Метод предусматривает поиск сохраненных векторов, элементы которых отличаются от соответствующих элементов вектора-инструмента прогнозирования не более чем на 0.7. Если такой вектор найден, то его считают подобным или близким инструменту прогнозирования. В данном примере,можно считать близким только вектор (0.6,1.5, 1.2), поскольку другие содержат элементы данных, отличающиеся от соответствующих элементов данных инструмента прогнозирования на величины, превышающие эпсилондиаметр наблюдений. В целом, векторы, извлеченные из базы данных, являются более мелкими фрагментами векторов большей размерности, выражающих все предыдущее движение поезда. Например,вектор, извлеченный из базы данных в вышеприведенном примере, может быть частью более обширного описания движения, имеющего полный дифференциальный внедренный временной ряд, такого вида:(2.2, 2.5, 1.9, 1.4, 0.6, 1.5, 1.2) Затем дают грубый прогноз положения поезда спустя одну секунду, просто обращаясь к дифференциальным данным, содержащимся в извлеченном элементе данных. Обращаются к элементу, отстоящему на одну секунду от эле 21 мента данных, который соответствует последнему элементу данных инструмента прогнозирования. Иными словами, поскольку инструмент прогнозирования соответствует части вектора (0.6, 1.5, 1.2), который был извлечен из базы данных, прогноз можно определить, обратившись к следующему элементу данных в будущем, в данном случае, 1.4. Предполагается,что дифференциальный временной ряд для данного поезда имеет следующий вид:(1.4, 1, 1, 1),который можно преобразовать в вектор абсолютного положения поезда:(11.4, 10, 9, 8, 7),иными словами, согласно прогнозу, положение поезда спустя одну секунду составляет 11.4 м от абсолютного элемента данных. В этом примере,группа сводится к точке, поскольку в данном конкретном примере из базы данных извлечен только один вектор данных. Конечно, мы рассмотрели очень простой пример, поясняющий изобретение. В действительности, выбирают значение d, превышающее 3, и извлекают из базы данных много векторов,близких к d-мерному инструменту прогнозирования. Обращаются к следующему элементу каждого из этих векторов, и идентифицируют наибольший и наименьший, чтобы получить диапазон возможных положений поезда в будущем. Ниже, это объясняется более подробно. Следует также отметить, что не обязательно обращаться только к следующему элементу в извлеченном векторе данных. Можно проверять элемент, соответствующий любому количеству выборок вперед по времени. Например, если в рамках вышеприведенного примера нужно получить прогноз положения поезда через 4 с, то из извлеченной группы данных нужно взять следующие четыре значения и добавить их в инструмент прогнозирования, в результате чего получается:(2.2, 2.5, 1.9, 1.4, 1, 1, 1) Это дает прогнозируемое положение поезда (10+1.4+1.9+2.5+2.2) = 18 м. Аналогично,можно получить положение поезда спустя 3 с, 2 с и т.д. Согласно вышеописанному методу, положение поезда спустя 3 с составляет 15.8 м, и спустя 2 с - 13.3 м. Конечно, чем более отдалено время, на которое приходится прогноз, тем менее точен этот прогноз, поскольку у рассматриваемого поезда оказывается больше времени,чтобы его поведение отклонилось от поведения поездов, из положений которых создана сохраненная база данных. Однако, если база данных достаточно велика, чтобы в ней можно было хранить данные, соответствующие очень большому количеству перемещений, то из нее можно извлекать много точек, подобных инструменту прогнозирования, и для будущего положения поезда можно получить диапазон возможных положений с относительной степенью определенности. 22 Теперь опишем настоящее изобретение на конкретном примере. Прежде всего, рассмотрим профиль скорости, изображенный на фиг. 8. Можно видеть, что в первые три секунды поезд ускорятся до 2 м в секунду, в течение двух секунд движется равномерно с этой скоростью, а затем, в течение 2 с замедляется до 1 м в секунду, и сохраняет эту скорость еще секунду. На фиг. 9 показан график абсолютного положения поезда во время его движения. Предположим,мы хотим знать, что происходит, когда требуется сделать прогноз положения поезда через одну секунду в момент времени t = 8 с. В этот момент времени, история предыдущих положений поезда выглядит следующим образом:(11, 10, 8.75, 7, 5, 3, 1.33, 0.33) Соответствующий вектор дифференциального временного ряда имеет вид:(1, 1.25, 1.75, 2, 2, 1.66, 1) Из фиг. 7 явствует, что этот вектор близко соответствует средней скорости поезда в точке посередине между соседними элементами данных. В этом примере, размерность вложения d выбрана равной 5. Таким образом, 5-мерный вектор дифференциального вложенного временного ряда представляет собой:(1, 1.25, 1.75, 2, 2) Этот вектор является инструментом прогнозирования, используемым в процессе прогнозирования. Теперь предположим, что мы имеем базу данных предыдущих траекторий, которые не только соответствуют последовательности моментов времени, аналогичной последовательности моментов времени в инструменте прогнозирования (т.е. каждая секунда), но также содержит дополнительные дифференциальные данные положения для моментов времени в будущем. Представим нашу предполагаемую базу данных в виде таблицы Т 0.3081 0.8606 0.1067 0.2228 0.0875 0.7106 0.3777 0.4615 0.1159 0.3886 0.3168 0.7447 0.5919 0.0052 0.0559 Вышеприведенная таблица представляет всю базу данных сохраненных точек. В последнем столбце таблицы находятся точки, сохраненные для момента времени, следующего за моментом времени, представленным первым столбцом (который соответствует самому по 23 следнему моменту времени в инструменте прогнозирования). Процесс извлечения предусматривает выбор эпсилон-диаметра наблюдений, который определяет, насколько близки должны быть точки данных, чтобы их можно было использовать. В этом примере мы используем эпсилондиаметр наблюдений, равный 0.79. Все сохраненные векторы, индивидуальные элементы которых отличаются от соответствующих индивидуальных элементов инструмента прогнозирования на величину, превышающую 0.79, отбрасываются. Применяя это условие к данному примеру, получаем следующую таблицу: Для получения прогноза, обратимся к столбцу "t+1". Чтобы осуществить групповое прогнозирование, нужно рассмотреть диапазон значений, имеющихся в этом столбце таблицы. В данном случае, значения лежат в интервале[0.6067 - 1.2378]. Следовательно, контроллер может сделать вывод, на основании прошлых данных, что значение будущего положения поезда через одну секунду будет находиться в интервале между 0.6067 и 1.2378. Это соответствует возможному диапазону абсолютных положений [11.6067 - 12.2378]. Этот интервал показан на фиг. 9. Если необходимо, можно сделать точечный прогноз вместо группового прогноза, взяв среднее всех прогнозов будущего, задаваемых каждым вектором данных, извлеченных из базы данных. В вышеприведенном примере, эта точка является средним значением чисел 1.2378,0.6067, 0.8332, 0.7740 и 0.7648, которое равно 0.8433. Альтернативно, точечный прогноз можно получить, взяв среднее значение наибольшего и наименьшего из полученных чисел. В вышеприведенном примере, этот точечный прогноз является средним значением числе 1.2378 и 0.6067, которое равно 0.9223. Отсюда видно, что вышеописанный метод можно использовать для каждого поезда в сети,чтобы прогнозировать возможный диапазон положений в тот или иной момент времени в будущем. Эти диапазоны 1-мерных положений можно преобразовать в диапазон физических положений с использованием отображения F-1, 24 показанного на фиг. 7. Затем можно определить,перекрываются ли какие-либо из прогнозируемых физических положений одного поезда с прогнозируемыми физическими положениями другого поезда в сети. В этом случае, необходимо предпринять соответствующее действие,чтобы исправить ситуацию. Например, можно дать приказ одному или обоим поездам замедлить ход, чтобы их траектория изменилась и,соответственно, изменился прогнозируемый диапазон физических положений. Метод поиска в базе данных предпочтительно осуществлять в виде взаимной корреляции инструмента прогнозирования и всей базой данных. Полученные корреляционные данные можно проверить, чтобы увидеть, какие части базы данных имеют наибольшую корреляцию с инструментом прогнозирования, и извлечь их. В этом случае, прогнозы могут основываться на данных, извлеченных из тех частей базы данных, которые выражают соответствующее положение в будущем для каждого идентифицированного элемента базы данных. Другой метод сравнения инструмента прогнозирования с базой данных состоит в том, чтобы сначала сравнить первую координату инструмента прогнозирования со всей базой данных сохраненных координат. Затем, можно идентифицировать сохраненные координаты, находящиеся в пределах эпсилон-диаметра наблюдений координат инструмента прогнозирования. После этого,вторую координату инструмента прогнозирования сравнивают с координатами, непосредственно следующими за идентифицированными координатами. Этот процесс продолжают до тех пор, пока не сравнят все координаты инструмента прогнозирования. Метод позволяет идентифицировать сохраненные последовательности координат, содержащие координаты, каждая из которых находится в пределах эпсилондиаметра наблюдений координат инструмента прогнозирования. Метод группового прогнозирования можно рассматривать как способ использования ранее полученной информации о том, как поезда реагировали в прошлом, для прогнозирования любых действий поездов в будущем. Способ извлечения подобных векторов из базы данных можно использовать совместно со сравнением данной кривой скорости поездов с множеством сохраненных кривых скорости. Любые сохраненные кривые скорости, подобные кривой скорости рассматриваемого поезда, проверяют, что дает возможность получить диапазон данных скорости на некоторый момент времени в будущем. Использование эпсилон-диаметра наблюдений при сопоставлении траекторий скорости является лишь одним из способов сортировки базы данных. Для этого можно использовать любой известный метод сопоставления кривых,если этот метод базируется на топологии, выте 25 кающей из обычной метрики на евклидовых пространствах. Для усовершенствования вышеописанной системы, в центральной базе данных сохраняют классификацию путей, которую можно использовать в процессе прогнозирования. Например,участок пути может быть очень старым и извилистым, поэтому можно ожидать, что поезд будет двигаться иначе, тормозить медленнее и т.д. Это можно отразить в алгоритме прогнозирования, определив классы пути. Например, участки пути можно отнести к классу А, классу В и т.д. и к базе данных, используемой для прогнозирования движения поезда, можно обращаться только на предмет прошлых точек данных, полученных из того же типа пути. Иными словами, для разных классов путей строят разные базы данных. Если определено, что поезд идет по пути определенного класса, то для обеспечения прогноза используют только предыдущие траектории, записанные для того же типа пути. Для этого можно кодировать инструмент прогнозирования и сохранять векторы, как описано выше, но с дополнительной классификацией пути по типу в качестве последней координаты. Определение расстояния можно изменить,добавив бесконечный член к любой паре точек данных с разными координатами классификации по типу. Добавление бесконечного члена будет эффективно исключать данные из рассмотрения. Помимо качества пути, можно рассматривать дополнительные координаты, например,расстояние от поезда до следующей железнодорожной стрелки. Это может быть важно для прогнозирования, поскольку можно предположить, что часть детерминистических данных,которые определяют движение поезда, представляет собой информацию о том, когда требуется пересечь стрелку, или каково качество линии, что связано с трением и возможной нестабильностью движения. Дополнительное усовершенствование состоит в маркировке определенных участков пути в отношении предельной скорости. Пределы скорости для конкретного пути выражают в виде дополнительной координаты в векторе, задающем путь t1. Для прогнозирования скорости поезда в будущем (как показано на фиг.8) можно использовать метод группового прогнозирования и можно определять возможность или вероятность того, что эта скорость превысит предельную скорость пути на участке пути, из которого делают прогноз. Если это так, то можно предпринять соответствующие корректирующие действия. Имеется выбор по поводу того, как строить эмпирическую базу данных для прогнозов. Например, база данных может быть полностью разделенной, чтобы траекторию определенного поезда, идущего по пути определенного качества, можно было сравнивать только с траекто 004279 26 риями, полученными от аналогичных поездов,идущих по аналогичным путям. Альтернативно,делая любой отдельный прогноз, можно использовать данные, полученные от целой группы поездов на целом ряде путей. Каким образом точно разделить данные, чтобы научиться хорошему методу прогнозирования, это эмпирический вопрос. Вышеописанный метод одинаково хорошо работает как в случае, когда движение легко прогнозировать, так и в случае более беспорядочного движения. Ожидается, что прогнозируемые интервалы будут более точными, когда метод применяется к реальной сети поездов. Из вышеизложенного явствует, что настоящее изобретение предусматривает систему,которая использует относительно простые и общеизвестные компоненты для предотвращения столкновений поездов. С некоторых пор,мобильные телефоны и приемники ГСП стали коммерчески доступными, и стоимость таких устройств мала по сравнению со стоимостью установки АЗП. Используя центральный сервер,который отслеживает положения всех поездов,можно предпринимать разумные действия для минимизации возможности столкновений и минимизации разрушения обслуживания. Кроме того, систему можно полностью автоматизировать, оперативно соединяя средства связи с силовой системой поезда, чтобы поезд можно было останавливать посредством дистанционного управления. Следует заметить, что настоящее изобретение вовсе не опирается на существующую сигнальную систему, которая, как известно, ненадежна и подвержена сбоям. Поскольку никакие движущиеся механические детали практически не используются, данная система в высшей степени надежна и требует минимального обслуживания после установки. Настоящее изобретение можно использовать для замены современной сигнальной системы, и традиционную сигнализацию можно свертывать по мере расширения применения изобретения. Команда остановки, выдаваемая средством связи в случае наличия прогноза столкновения,может осуществляться с помощью звуковых или визуальных средств, установленных на поезде, и может применяться для извещения машиниста или иного лица, находящегося в кабине поезда,работа которого состоит в наблюдении за мобильным телефоном, играющим роль средства связи. Команда должна поступать всем машинистам, участвующим в прогнозируемом столкновении, или просто подмножеству всех машинистов. Независимые сигналы тревоги, предусмотренные настоящим изобретением, значительно снижают вероятность фактического крушения, поскольку, в целом, чтобы произошло крушение, необходимо, чтобы, по меньшей мере, двое из предупрежденных машинистов 27 проигнорировали предупреждение (эта вероятность равна квадрату вероятности того, что один машинист проигнорирует предупреждение), и, в любом случае, настоящее изобретение может обеспечивать автоматизированную линию связи между контроллером и тормозной системой поезда. Этим данная система отличается от предыдущих систем (например, АЗП), в которой только один машинист получает предупреждение о возможности столкновения. Другое преимущество изобретения состоит в том, что его можно быстро реализовать без необходимости модифицировать поезд или инфраструктуру путей. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения возможности столкновения поездов, содержащий этапы, на которых получают данные о положении поезда,передают упомянутые данные в контроллер,принимают упомянутые данные в контроллере,выполняют в контроллере с использованием принятых данных вычисления для прогнозирования положения поезда в будущее время и используют сведения о прогнозируемом будущем положении, чтобы определить, нужно ли предпринять какое-либо действие. 2. Способ по п.1, в котором на этапе вычисления из данных положения определяют векторы дифференциального положения, причем координаты векторов дифференциального положения выражают разность между двумя последовательными координатами вектора данных положения. 3. Способ по п.1 или 2, в котором вычисление включает обращение к базе данных сохраненных данных, относящихся к предыдущим перемещениям поезда, и идентификацию в базе данных векторов, подобных текущему вектору перемещения, причем текущий вектор перемещения является либо данными положения, либо векторами дифференциального положения, полученными из данных положения, и координаты векторов дифференциального положения выражают разность между двумя последовательными координатами вектора данных положения. 4. Способ по п.3, в котором база данных является базой данных сохраненных векторов дифференциального положения. 5. Способ по п.3, в котором база данных является базой данных сохраненных векторов положения. 6. Способ по любому из пп.3-5, в котором этап идентификации подобных векторов включает проверку, является ли модуль дополнительного вектора, полученного вычитанием потенциально подобного вектора, хранящегося в базе данных, из текущего вектора перемещения,меньшим, чем некоторое заданное положительное число. 28 7. Способ по любому из пп.3-6, в котором упомянутое вычисление включает считывание из базы данных прогнозирующих данных, причем прогнозирующие данные являются данными, записанными через конкретный период времени после упомянутых данных, идентифицированных как подобные. 8. Способ по п.7, дополнительно включающий прибавление одного и того же числа к каждой координате считанного вектора прогнозирующих данных, чтобы увеличить его на величину прибавляемого числа. 9. Способ по п.8, в котором прибавляемое число соответствует текущему положению поезда. 10. Способ по любому из пп.7-9, в котором считывается группа прогнозирующих данных,которая содержит максимальное значение и минимальное значение для любого данного конкретного периода времени. 11. Способ по п.10, в котором минимальное и максимальное значения выражают диапазон возможных положений поезда в упомянутое будущее время. 12. Способ по любому из предыдущих пунктов, в котором этапы получения данных,относящихся к положению поезда, и передачи данных в контроллер выполняются многократно для множества соответствующих поездов, и контроллер определяет возможность столкновения на основании прогноза будущего положения упомянутого множества поездов. 13. Способ по п.12, в котором этап прогнозирования будущего положения поезда является этапом, на котором прогнозируется множество интервалов будущих положений поезда для множества соответствующих поездов согласно способу по п.8, и этап определения возможности столкновения включает определение того,перекрываются ли, по меньшей мере, некоторые из множества прогнозируемых интервалов возможных положений поезда для упомянутого множества поездов. 14. Способ по любому из предыдущих пунктов, дополнительно включающий этап передачи сигнала предупреждения на поезд, если определено, что возможно столкновение. 15. Способ по любому из предыдущих пунктов, дополнительно включающий этап передачи сообщения остановки на поезд, если определено, что возможно столкновение. 16. Способ по п.15, дополнительно включающий этап автоматической остановки поезда в случае приема сообщения остановки от контроллера. 17. Способ по любому из предыдущих пунктов, в котором на этапе определения положения поезда используют сигналы, передаваемые спутниками ГСП. 18. Способ по любому из предыдущих пунктов, в котором этапы передачи и приема 29 выполняют с использованием сети электронной связи. 19. Способ по любому из предыдущих пунктов, в котором этапы передачи и приема выполняют с использованием Интернетпротоколов в структуре экстрасети. 20. Способ по любому из предыдущих пунктов, в котором этап передачи данных в контроллер выполняют с использованием мобильного телефона. 21. Способ по любому из предыдущих пунктов, в котором полученные данные, относящиеся к положению поезда, преобразуют в данные положения согласно модели вещественной прямой. 22. Способ по п.21, в котором на этапе вычисления, осуществляемого на контроллере,прогнозируют будущее положение или диапазон будущих положений согласно модели вещественной прямой. 23. Способ по п.22, в котором прогнозируемое положение или диапазон прогнозируемых положений преобразуют в данные, выражающие положение или диапазон положений в сети путей. 24. Устройство для определения возможности столкновения поездов, содержащее первое средство, находящееся на поезде, и второе средство, находящееся вне поезда,первое средство содержит средство определения положения для определения положения поезда, средство связи, оперативно подключаемое к средству определения положения, для передачи результата определения положения,полученного средством определения положения,второе средство содержит средство приема для приема результата определения положения от средства связи, средство прогнозирования для прогнозирования будущего положения поезда на основании принятого результата определения положения и средство определения столкновения для определения возможности столкновения на основании результата, полученного средством прогнозирования. 25. Устройство по п.24, в котором второе средство дополнительно содержит базу данных сохраненных данных, относящихся к предыдущим перемещениям поезда. 26. Устройство по п.25, в котором средство прогнозирования содержит средство идентификации для идентификации сохраненных данных,подобных результатам определения положения или подобных данным, полученным из результатов определения положения. 27. Устройство по п.26, в котором средство прогнозирования дополнительно содержит средство извлечения для извлечения прогнозирующих данных, которые были первоначально получены для будущего времени по отношению к идентифицированным сохраненным данным. 30 28. Устройство по п.27, в котором средство извлечения предназначено для извлечения группы прогнозирующих данных, которая содержит минимальное и максимальное значения. 29. Устройство по п.28, в котором группа задает диапазон прогнозируемых будущих положений поезда. 30. Устройство по п.29, в котором средство определения столкновения использует множество групп прогнозирующих данных, полученных для разных поездов, и определяет, что возможно столкновение, когда по меньшей мере две группы перекрываются. 31. Устройство по любому из пп.24-30, в котором средство определения положения содержит приемник ГСП. 32. Устройство по любому из пп.24-31, в котором средство определения положения содержит мобильный телефон. 33. Устройство по любому из пп.24-32, в котором средство определения положения содержит портативный компьютер, снабженный модемом. 34. Устройство по любому из пп.24-33, дополнительно содержащее средство, входящее в состав второго средства, для передачи сообщения на первое средство. 35. Устройство по п.34, в котором сообщение содержит сообщение предупреждения. 36. Устройство по п.34, в котором сообщение содержит сообщение остановки. 37. Устройство по пп.24-36, дополнительно содержащее средство, входящее в состав второго средства, для передачи сигнала возобновления движения, когда определено, что остановленный поезд может безопасно начать движение. 38. Устройство по п.37, дополнительно содержащее средство, входящее в состав первого средства, для возобновления движения остановленного поезда по получении принятого сигнала возобновления движения. 39. Средство обеспечения безопасности поезда для использования в соответствии со способом по любому из пп.1-23, содержащее средство определения положения, средство связи, оперативно подключаемое к средству определения положения, для передачи результатов определения положения. 40. Контроллер для использования в соответствии со способом по любому из пп.1-23,содержащий средство приема для приема данных, относящихся к результатам определения положения поезда, средство прогнозирования для прогнозирования будущего положения поезда на основании принятых данных положения поезда и средство определения столкновения для определения возможности столкновения на основании прогнозируемого будущего положения. 41. Применение мобильного телефона для передачи данных, относящихся к результатам 31 определения положения поезда, и для приема данных, относящихся к возможности столкновения. 42. Применение компьютерной системы для приема данных, относящихся к результатам определения положения поезда, для прогнозирования возможности столкновения на основании прогнозируемого будущего положения и для передачи сообщений на поезд, если прогнозируется возможность столкновения. 43. Средство памяти для хранения компьютерно-считываемых команд, которое при подключении к компьютеру функционирует для обеспечения возможности компьютеру осуществлять способ, включающий 32 прием данных от множества поездов, причем данные относятся к результатам определения положения соответствующего поезда,обращение к базе данных, доступной компьютеру, причем база данных содержит информацию о сети поездов, в которой находится поезд,вычисление с использованием принятых данных положения и базы данных сети положения каждого поезда на пути сети,прогнозирование положения каждого поезда на некоторый момент времени в будущем и определение возможности столкновения между двумя или более из множества поездов с использованием прогнозируемых будущих положений.
МПК / Метки
МПК: B61L 23/34
Метки: транспорте, железнодорожном, безопасности, система
Код ссылки
<a href="https://eas.patents.su/18-4279-sistema-bezopasnosti-na-zheleznodorozhnom-transporte.html" rel="bookmark" title="База патентов Евразийского Союза">Система безопасности на железнодорожном транспорте</a>
Покрывающая композиция, предпочтительно чернила для печати в системе безопасности, способ получения покрывающей композиции и применение стеклокерамики
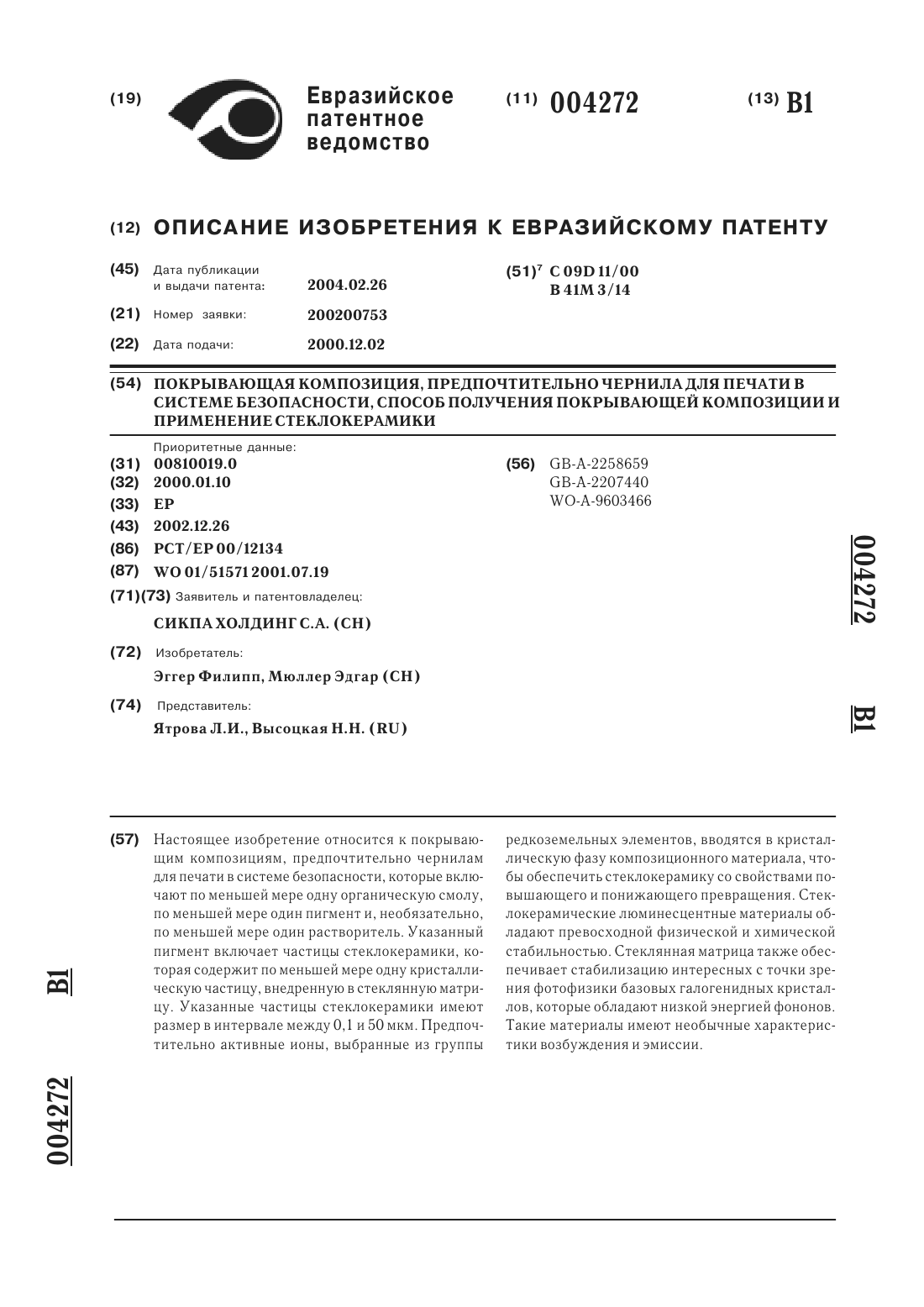
Номер патента: 4272
Опубликовано: 26.02.2004
Авторы: Эггер Филипп, Мюллер Эдгар
МПК: B41M 3/14, C09D 11/00
Метки: предпочтительно, композиция, стеклокерамики, композиции, покрывающая, покрывающей, чернила, применение, способ, безопасности, системе, печати, получения
Формула / Реферат:
1. Покрывающая композиция, предпочтительно чернила для печати в системе безопасности, которая включает по меньшей мере одну органическую смолу, по меньшей мере один пигмент и, необязательно, по меньшей мере один растворитель, отличающаяся тем, что указанный пигмент включает частицы стеклокерамики, которая содержит по меньшей мере одну кристаллическую фазу, внедренную в стеклянную матрицу, причем указанный пигмент имеет размер частиц в интервале...
Способ управления идентификацией перемещаемых объектов и система для его осуществления
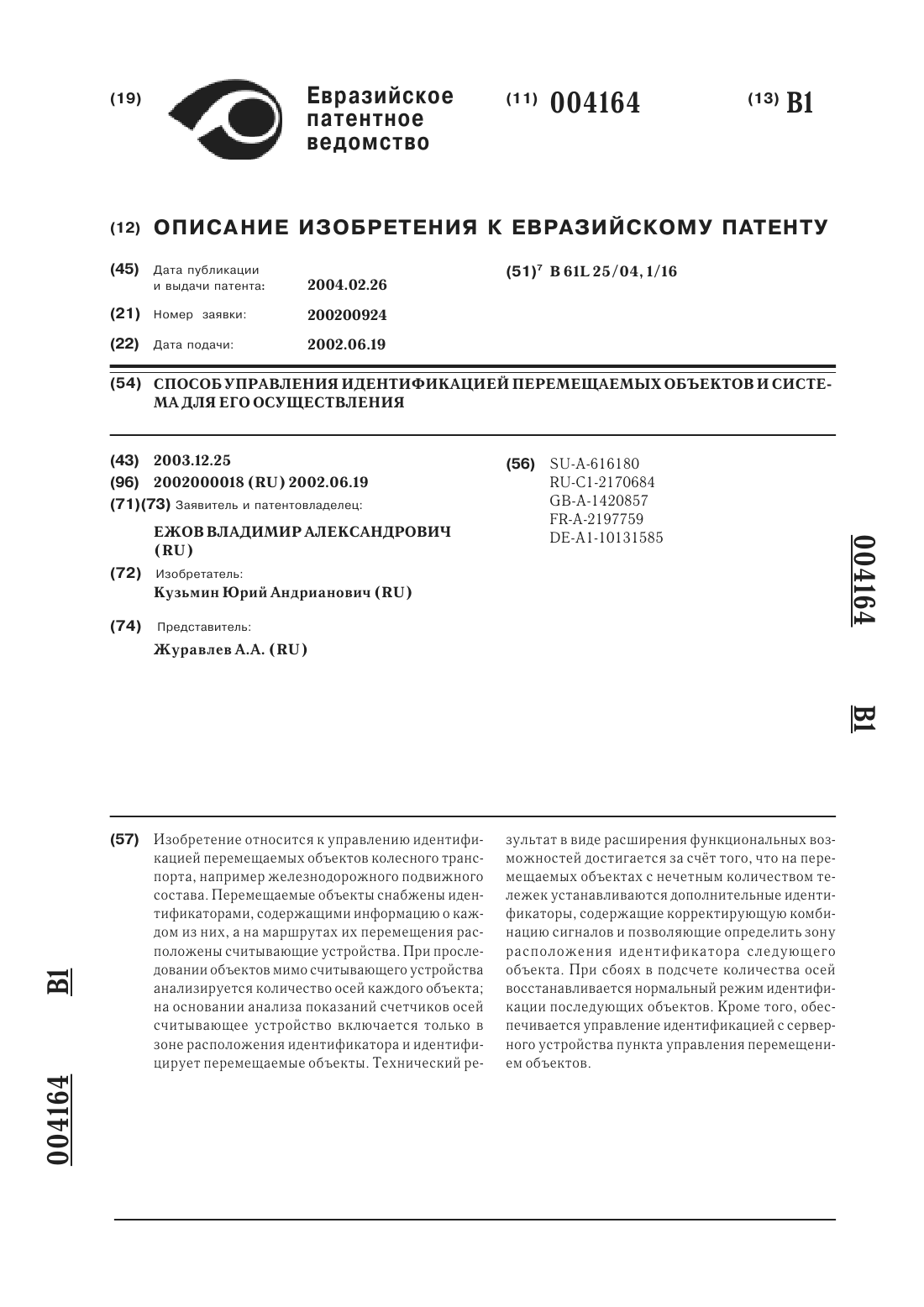
Номер патента: 4164
Опубликовано: 26.02.2004
Автор: Кузьмин Юрий Андрианович
МПК: B61L 1/16, B61L 25/04
Метки: управления, способ, осуществления, перемещаемых, идентификацией, система, объектов
Формула / Реферат:
1. Способ управления идентификацией перемещаемых объектов, при котором объекты оборудуют идентификаторами, а считывающее устройство дополняют двумя счетчиками осей перемещаемых объектов, подсчитывают и сравнивают количество осей каждого проследовавшего объекта, при их совпадении включают генератор опросного сигнала, считывают идентификаторы подвижных объектов, а после нарушения равенства выключают генератор опросного сигнала, отличающийся тем,...
Магнитный накопитель энергии, высоковольтная система и система передачи электрической энергии
Номер патента: 2609
Опубликовано: 27.06.2002
Авторы: Хольмберг Пер, Зассе Кристиан, Фромм Удо
МПК: H01F 6/06, H01B 12/00
Метки: энергии, накопитель, магнитный, передачи, электрической, высоковольтная, система
Формула / Реферат:
1. Сверхпроводниковый магнитный накопитель энергии, содержащий катушку (1), последовательно соединенную с источником (2) напряжения, причем катушка (1) навита из сверхпроводящего проводника (12), имеющего сверхпроводящее средство (14) в виде слоя, которое при работе находится при криогенной температуре ниже критической температуры сверхпроводимости (Тс), окруженное электрической изоляцией (20-22), и устройство выключения (3) для короткого...
Система заключения пари
Номер патента: 3621
Опубликовано: 28.08.2003
Автор: Стронач Эндрю М.
МПК: G06F 17/60, G07F 17/32
Метки: заключения, система, пари
Формула / Реферат:
1. Система заключения пари, содержащая процессор заключения пари, предназначенный для получения условий пари по состязаниям на основании полученных от игроков, заключающих пари, прогнозов относительно исходов действий, причем каждый прогноз относительно исхода действия задает прогнозируемый исход действия по заключению пари при наличии совокупности возможных исходов действия, причем каждое условие пари содержит сумму ставки и, по меньшей мере,...
Система для тушения огня
Номер патента: 3803
Опубликовано: 30.10.2003
Автор: Демоле Фредерик Жан-Пьер
МПК: A62C 3/02
Формула / Реферат:
1. Система (10) для тушения огня, содержащая трубопровод (11) для его размещения в пространстве и для подачи огнегасящей жидкости (18) в защищаемое пространство; направляющую (20), проходящую в продольном направлении трубопровода (11); насосное средство (24), выполненное с возможностью перемещения по направляющей (20) и с возможностью перекачивания жидкости (18), подаваемой в трубопровод (11); средство (28, 29) привода, выполненное с...
Предыдущий патент: Обслуживание процесса производства нефти и очистного оборудования
Следующий патент: Рецесс-фильтр и курительное изделие с рецесс-фильтром
Случайный патент: Кристаллические модификации пираклостробина