Способ и устройство для точной синхронизации частоты в системах демодуляции множества несущих
Номер патента: 2748
Опубликовано: 29.08.2002
Авторы: Буххольц Штефан, Эберляйн Эрнст, Бадри Сабах, Липп Штефан, Хойбергер Альберт, Герхойзер Хайнц

Формула / Реферат
1. Способ выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающий дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем способ включает этапы
а) определения разности между фазами одной несущей в разных символах,
б) определения смещения частоты путем исключения из разности фаз с использованием решающего устройства для М-позиционной фазовой манипуляции неопределенностей фазового сдвига, относящихся к передаваемой информации, и
в) выполнения коррекции обратной связи для девиации частоты несущей на основе определенного смещения частоты.
2. Способ выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем способ включает этапы
а) определения соответствующих фаз одной несущей в разных символах,
б) исключения из упомянутых фаз с использованием решающего устройства для М-позиционной фазовой манипуляции неопределенностей фазового сдвига, относящихся к передаваемой информации, для определения соответствующих девиаций фазы,
в) определения смещения частоты путем определения разности фаз между девиациями фазы и
г) выполнения коррекции обратной связи для девиации частоты несущей на основе определенного смещения частоты.
3. Способ по п.1, отличающийся тем, что
этапы (а) и (б) выполняют для множества несущих в упомянутых символах,
усредненное смещение частоты определяют путем усреднения упомянутых определенных смещений частоты множества несущих и
коррекцию обратной связи для девиации частоты выполняют на этапе (в) на основе упомянутого усредненного смещения частоты.
4. Способ по п.2, отличающийся тем, что
этапы (а), (б) и (в) выполняют для множества несущих в упомянутых символах,
усредненное смещение частоты определяют путем усреднения упомянутых определенных смещений частоты множества несущих и
коррекцию обратной связи для девиации частоты выполняют на основе упомянутого усредненного смещения частоты.
5. Способ по п.1, отличающийся тем, что этап (а) включает этап определения разности между фазами одной и той же несущей в символах, которые являются смежными в направлении по временной оси.
6. Способ по п.1, отличающийся тем, что этап (б) включает этап устранения неопределенностей фазового сдвига, соответствующих М-позиционным фазовым сдвигам.
7. Способ по п.2, отличающийся тем, что этап (а) включает этап определения соответствующих фаз одной и той же несущей в символах, которые являются смежными в направлении по временной оси.
8. Способ по п.2, отличающийся тем, что этап (б) включает этап устранения М-позиционных фазовых сдвигов.
9. Устройство для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем устройство содержит
средство для определения разности фаз между фазами одной и той же несущей в разных символах,
решающее устройство для М-позиционной фазовой манипуляции, соединенное с выходом упомянутого средства для определения разности фаз, для определения смещения частоты путем устранения из разности фаз неопределенностей фазового сдвига, относящихся к передаваемой информации, и
средство, соединенное с выходом упомянутого решающего устройства для М-позиционной фазовой манипуляции, для выполнения коррекции обратной связи для девиации частоты несущей на основе определенного смещения частоты.
10. Устройство для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем устройство содержит
средство для определения соответствующих фаз одной и той же несущей в разных символах,
решающее устройство с М-позиционной фазовой манипуляцией, соединенное с выходом упомянутого средства для определения соответствующих фаз, для устранения из упомянутых фаз неопределенностей фазового сдвига, относящихся к передаваемой информации, для определения соответствующих девиаций фазы,
средство, соединенное с выходом упомянутого решающего устройства с М-позиционной фазовой манипуляцией, для определения смещения частоты путем определения разности фаз между девиациями фазы и
средство, соединенное с выходом упомянутого средства для определения смещения частоты, для выполнения коррекции обратной связи для девиации частоты на основе определенного смещения частоты.
11. Устройство по п.9, отличающееся тем, что дополнительно содержит средство для определения усредненного смещения частоты путем усреднения определенных смещений частоты множества несущих, причем средство для выполнения коррекции обратной связи выполняет коррекцию обратной связи для девиации частоты на основе упомянутого усредненного смещения частоты.
12. Устройство по п.10, отличающееся тем, что дополнительно содержит средство для определения усредненного смещения частоты путем усреднения определенных смещений частоты множества несущих, причем средство для выполнения коррекции обратной связи выполняет коррекцию обратной связи для девиации частоты на основе упомянутого усредненного смещения частоты.
13. Устройство по п.9, отличающееся тем, что упомянутое средство для определения разности фаз содержит средство для определения разности фаз между фазами одной и той же несущей в символах, которые являются смежными в направлении по временной оси.
14. Устройство по п.10, отличающееся тем, что упомянутое средство для определения соответствующих фаз содержит средство для определения соответствующих фаз одной и той же несущей в символах, которые являются смежными в направлении по временной оси.
15. Устройство по п.9, отличающееся тем, что упомянутое средство для выполнения коррекции обратной связи для девиации частоты содержит генератор с цифровым управлением и комплексный умножитель.
16. Устройство по п.15, отличающееся тем, что упомянутое средство для выполнения коррекции обратной связи для девиации частоты дополнительно содержит низкочастотный фильтр, включенный перед генератором с цифровым управлением.

Текст
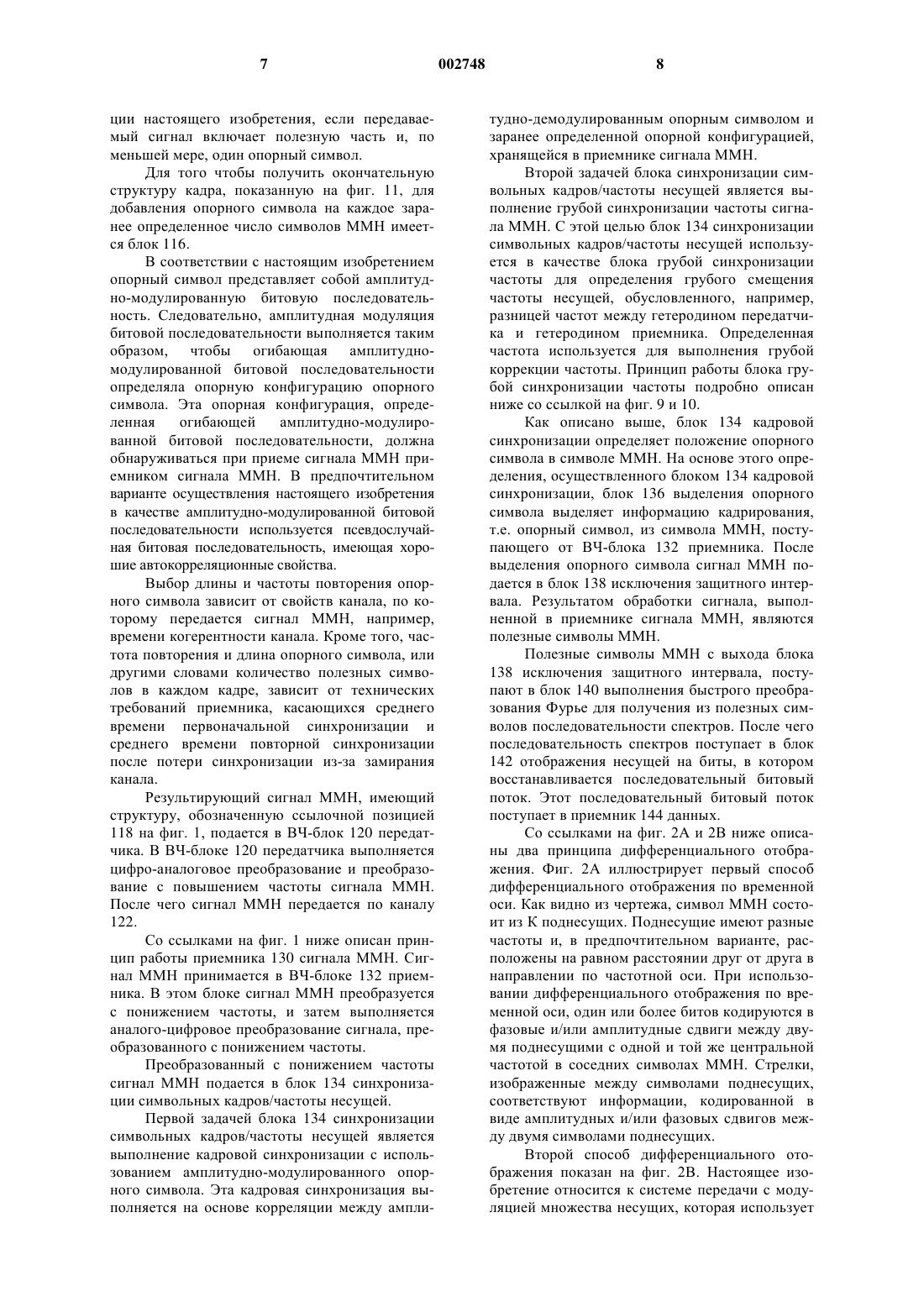
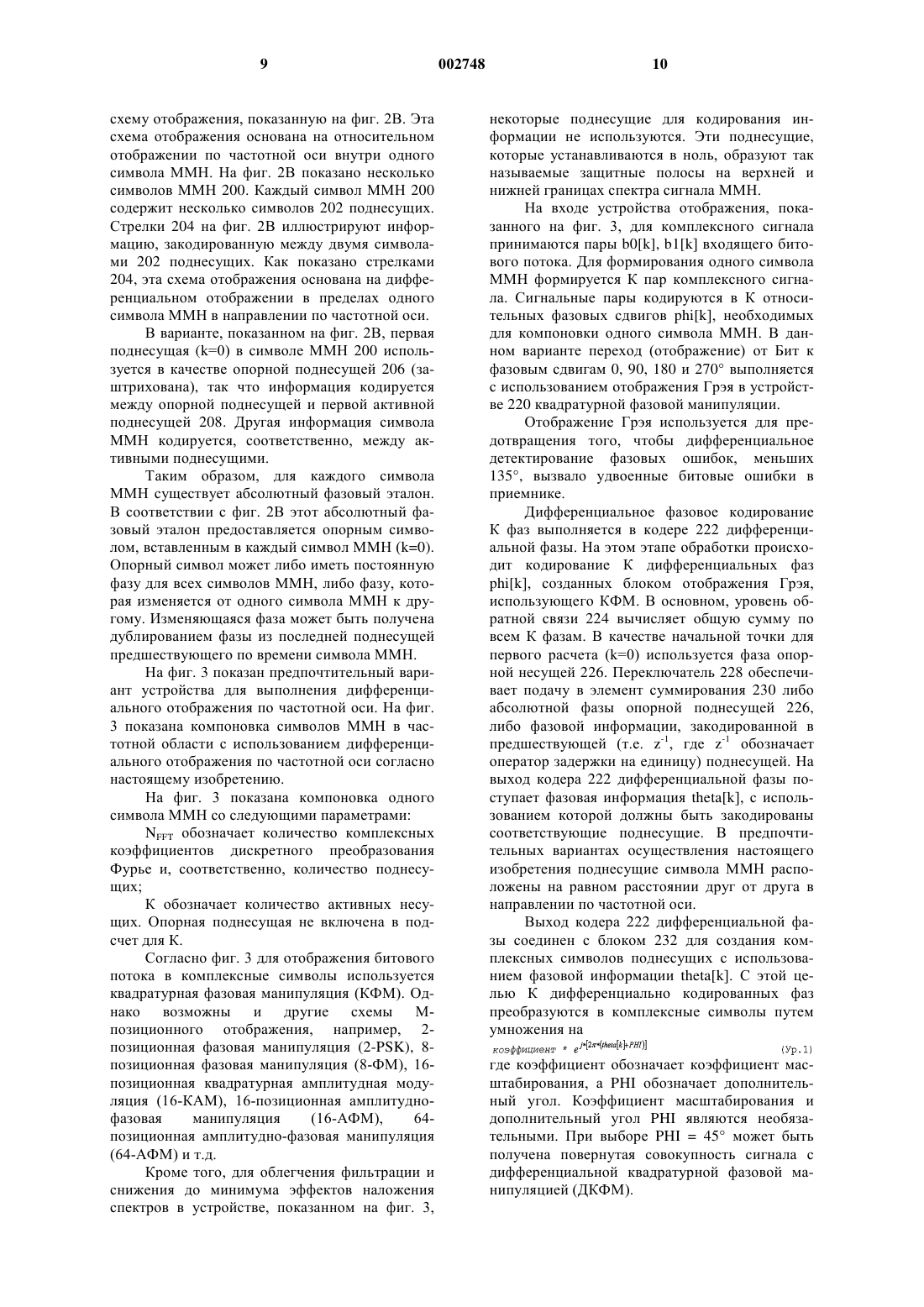
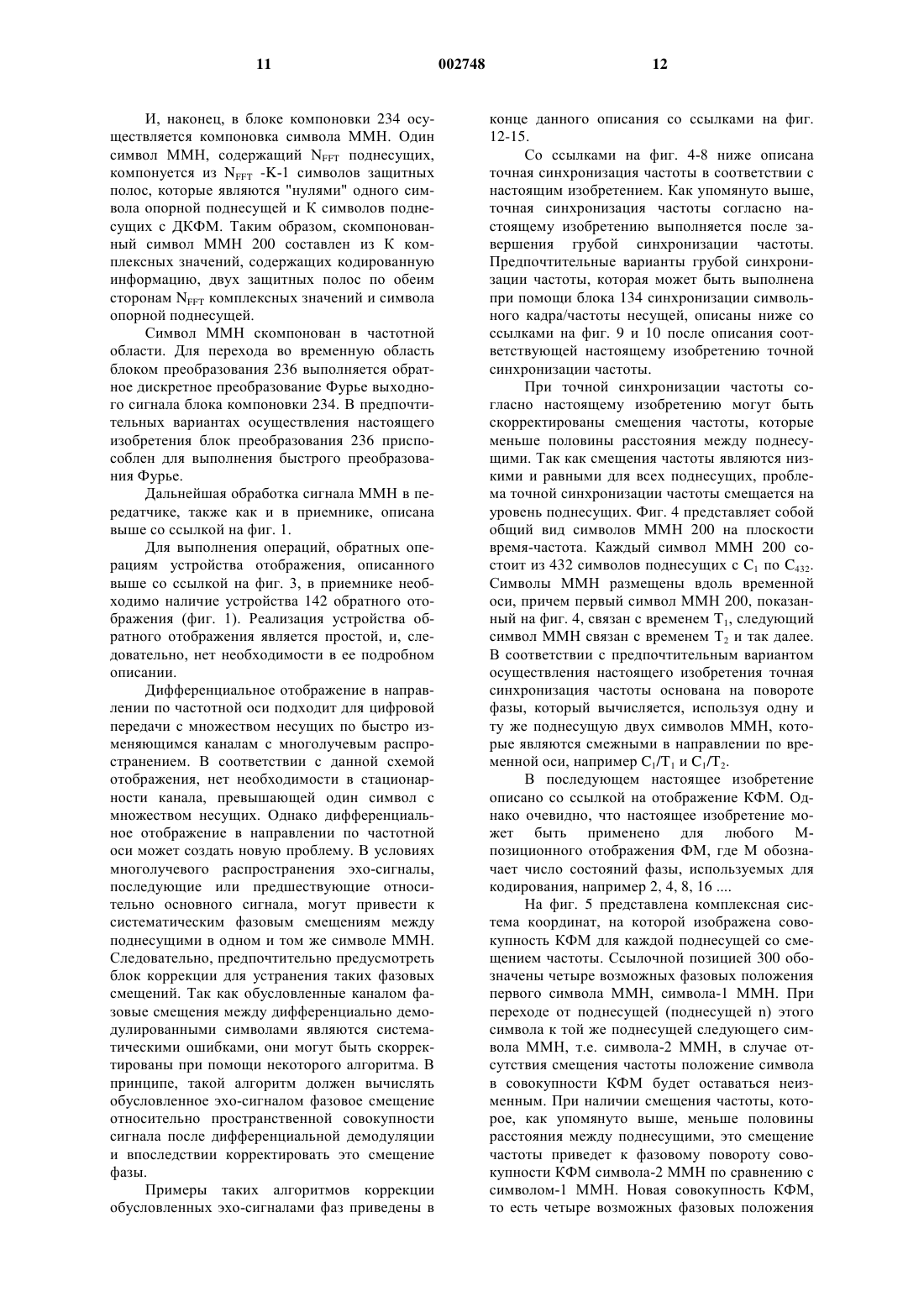
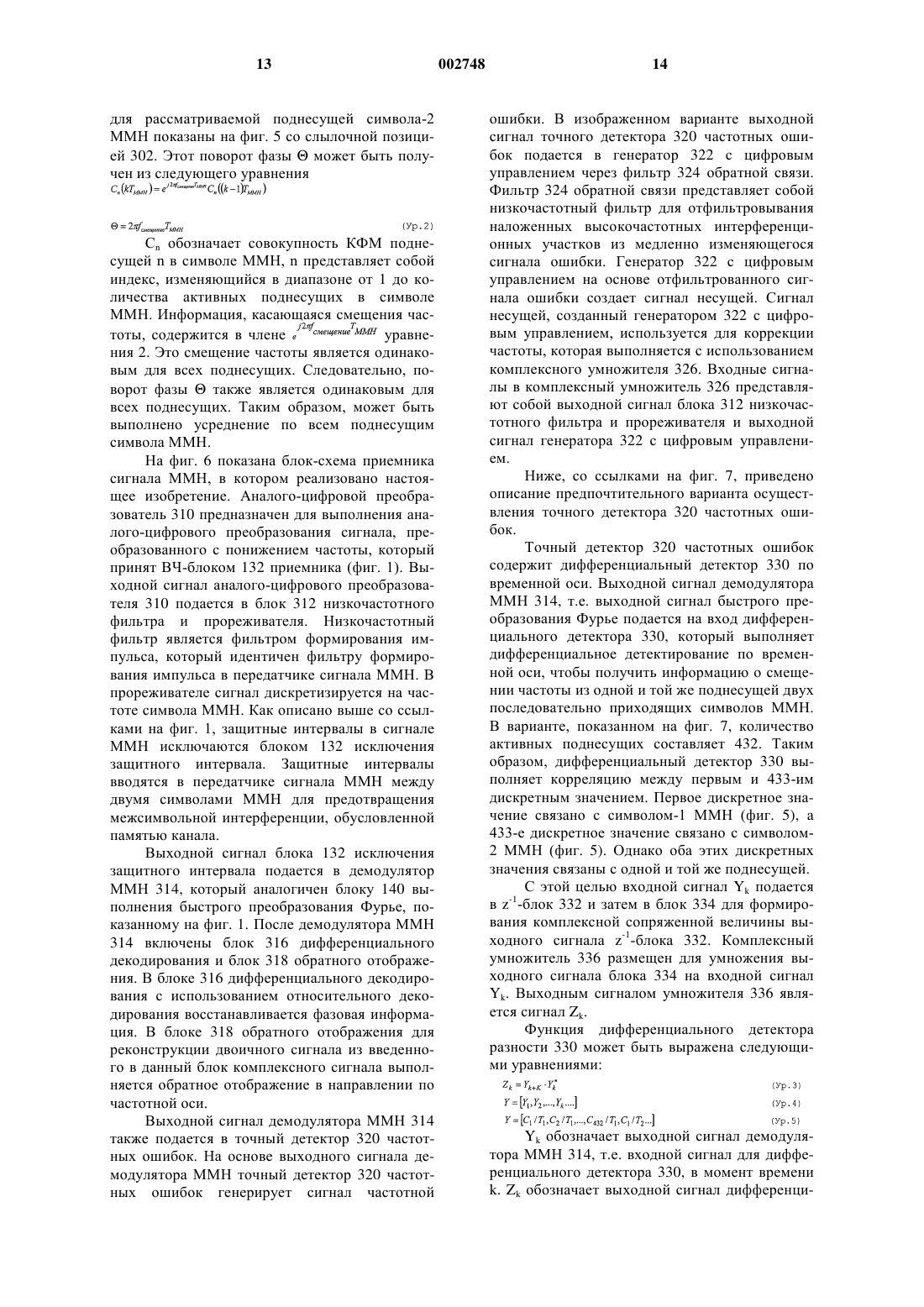
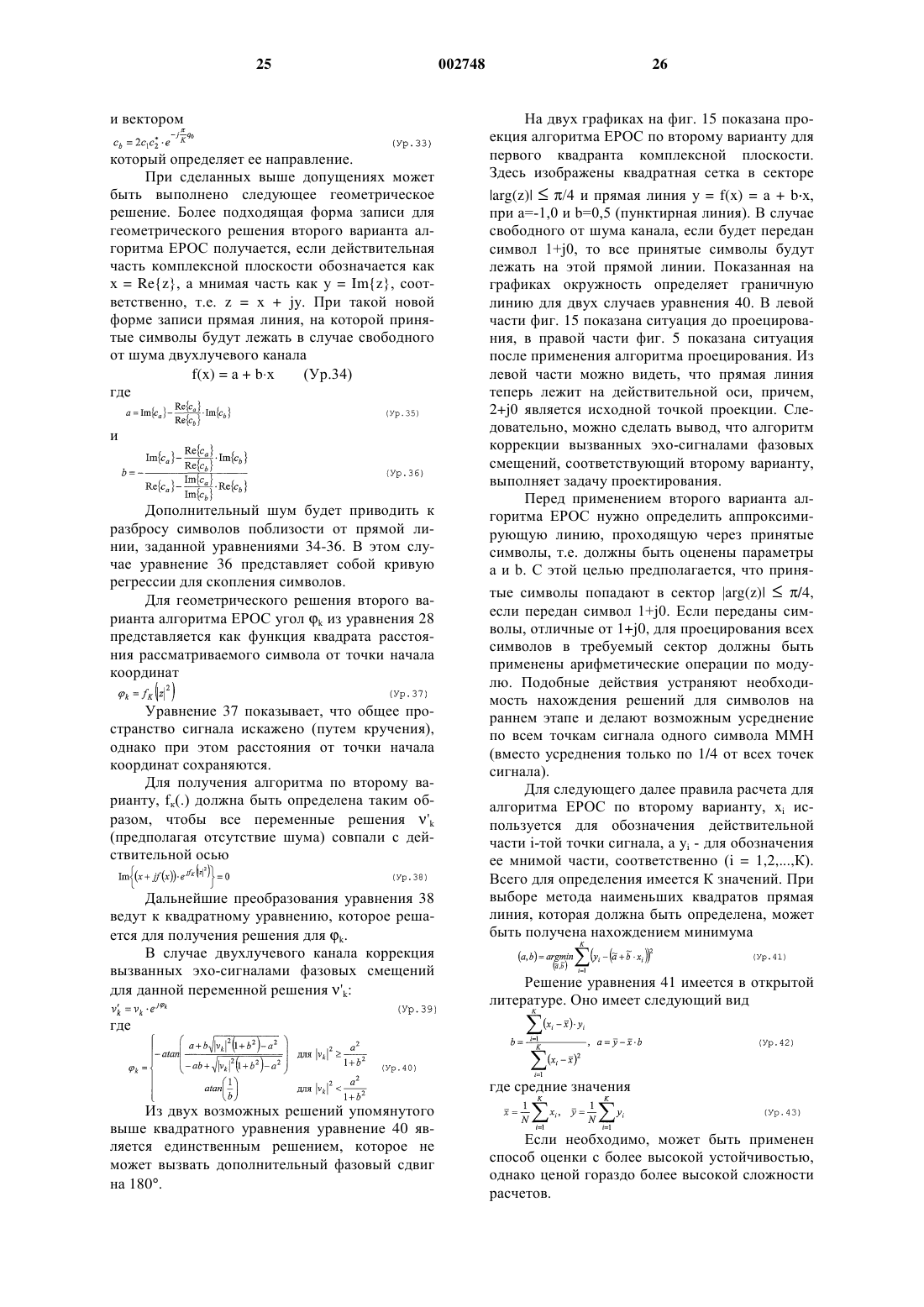
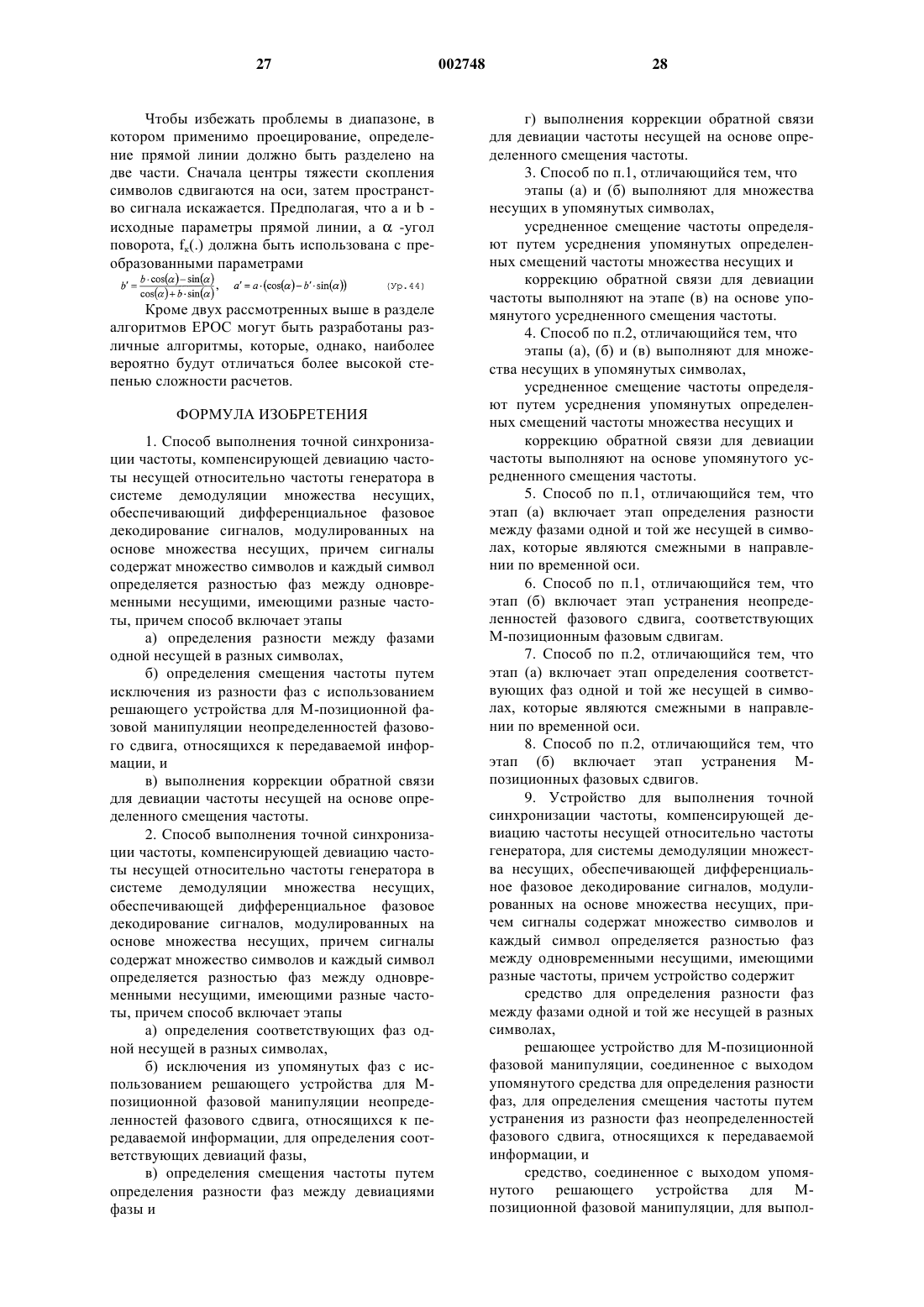
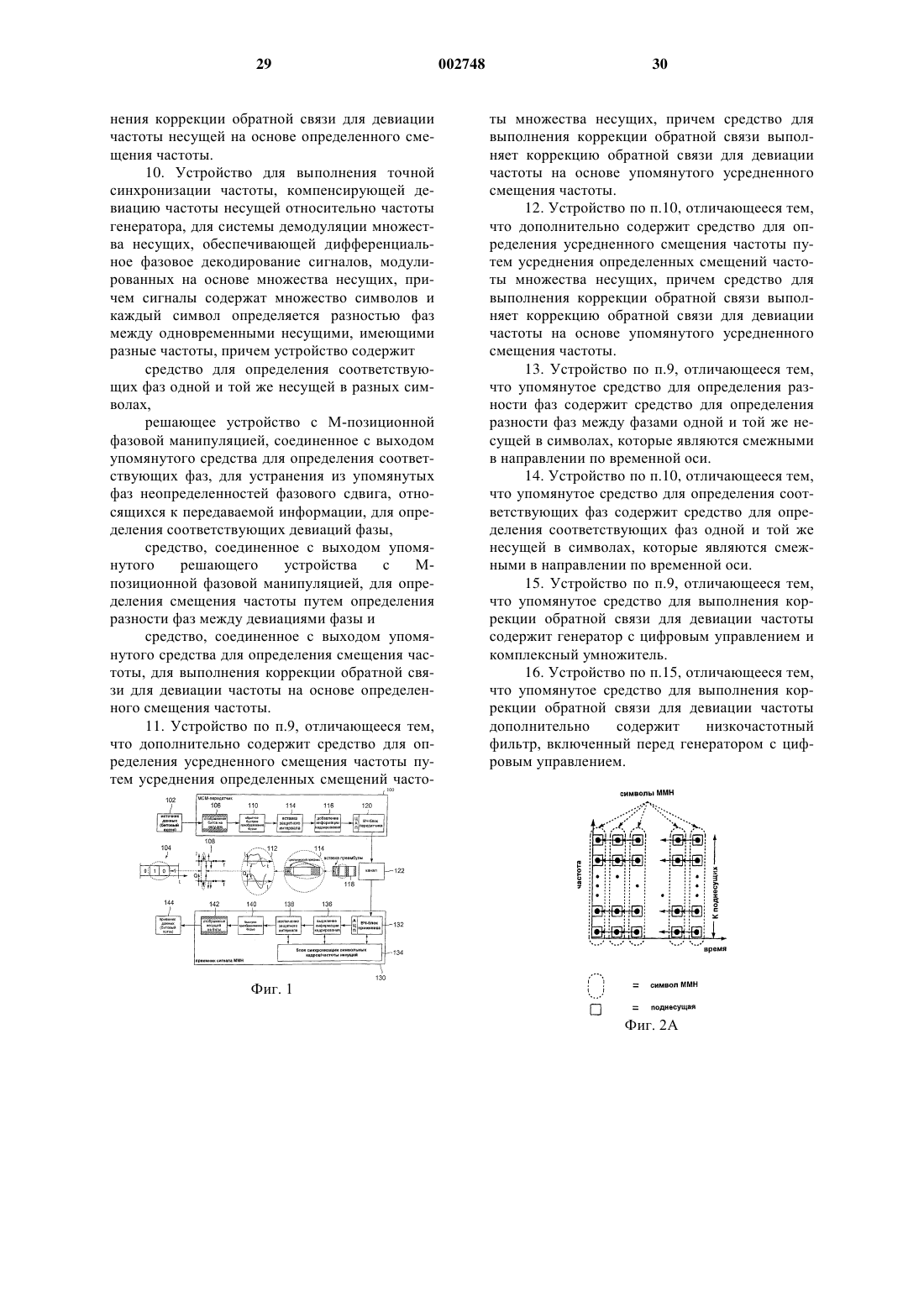
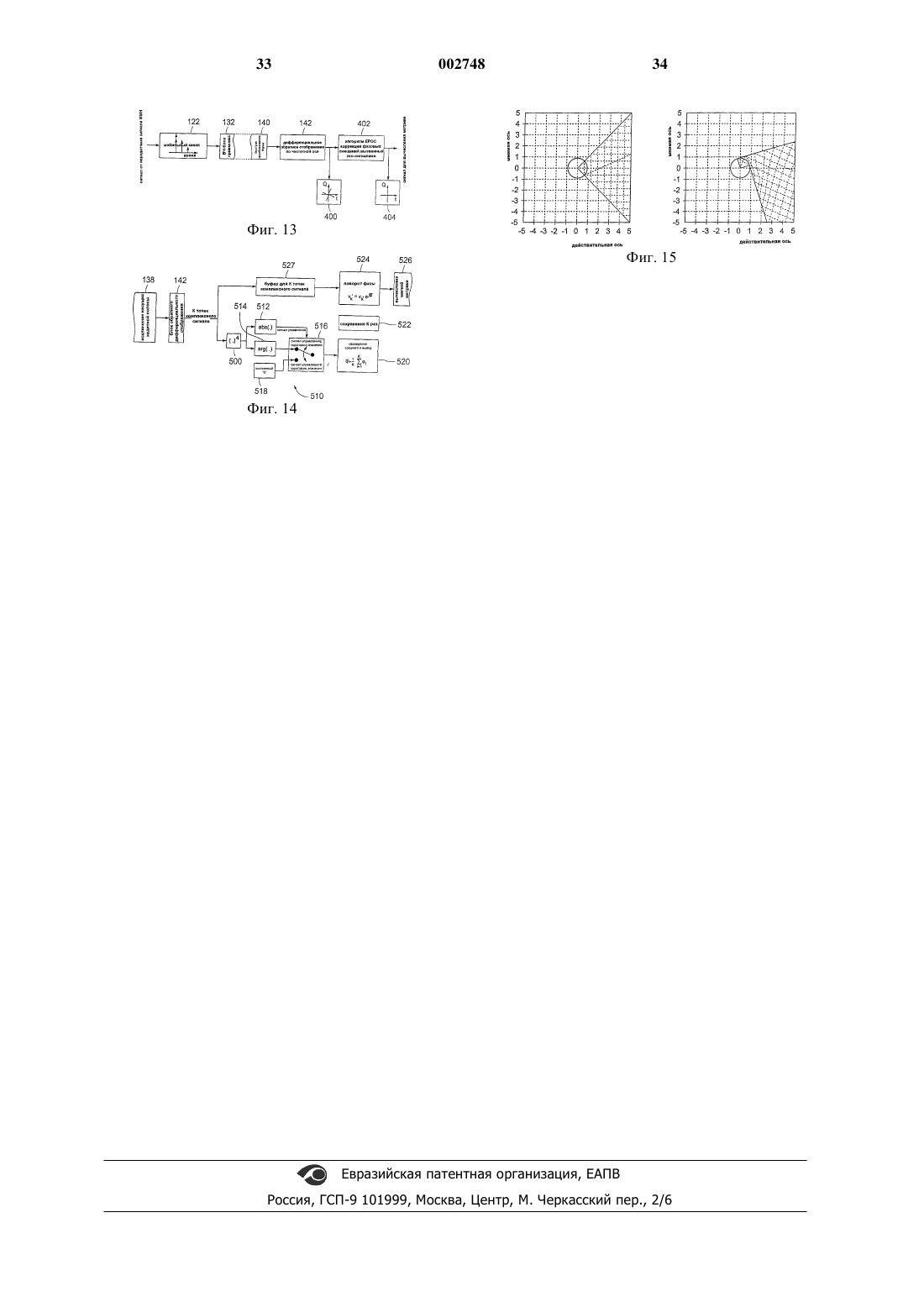
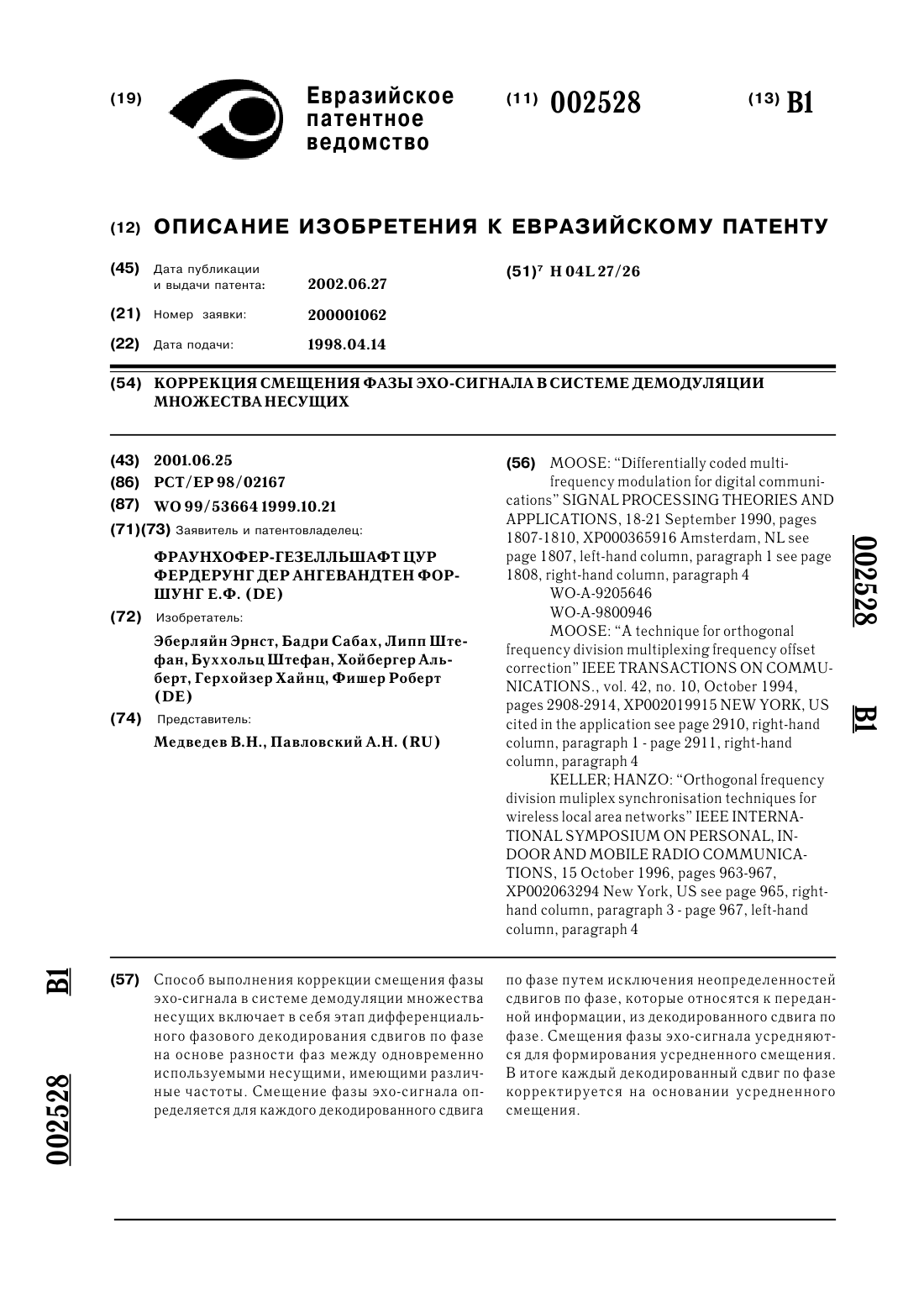
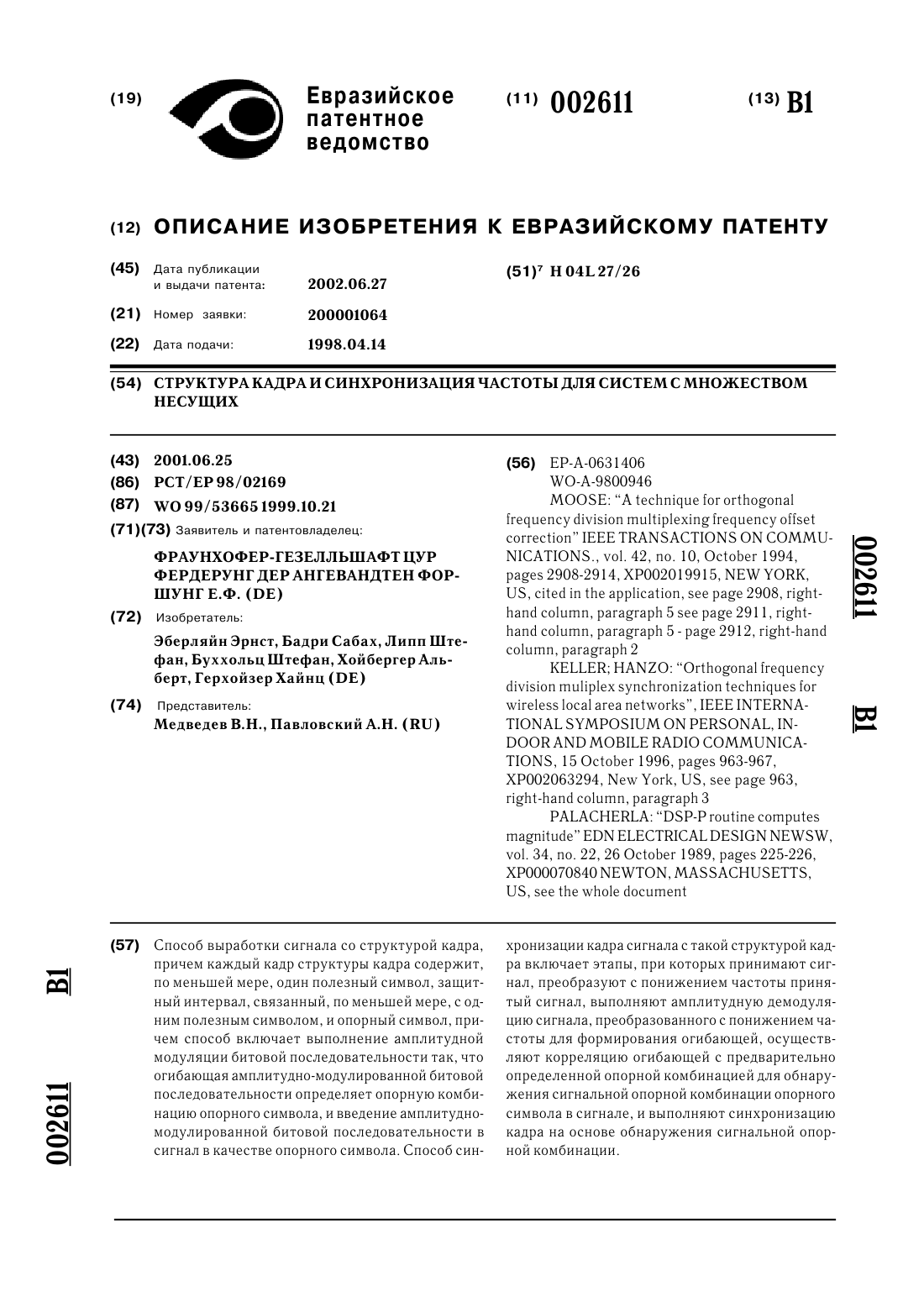
1 Область техники Настоящее изобретение относится к способам и устройству для выполнения точной синхронизации частоты в системах демодуляции множества несущих, и, в частности, к способам и устройству для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов, и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты. Предпосылки изобретения В системе передачи с множеством несущих (например, в системе с модуляцией множества несущих - ММН или в системе с ортогональным частотным уплотнением - ОЧУ) влияние смещения частоты несущей, по существу,является более значительным, чем в системе передачи с одной несущей. Модуляция множества несущих является более чувствительной к фазовому шуму и смещению частоты, которое возникает как искажение амплитуды и интерференция между несущими. Интерференция между несущими приводит к тому, что поднесущие перестают быть ортогональными друг относительно друга. Смещения частоты происходят после включения питания или позднее из-за девиации частоты генераторов, применяющихся для понижающего преобразования в полосу частот модулирующих сигналов. Типовая точность для частоты генератора свободных колебаний составляет приблизительно 50 миллионных долей от частоты несущей. Например, при частоте несущей в S-диапазоне 2,34 ГГц, максимальная девиация частоты гетеродина будет выше 100 кГц (117,25 кГц). Вышеназванные эффекты обуславливают высокие требования,предъявляемые к алгоритму, используемому для коррекции смещения частоты. Предшествующий уровень техники Большинство существующих алгоритмов синхронизации частоты разделяют коррекцию частоты на два этапа. На первом этапе выполняется грубая синхронизация частоты. На втором этапе может быть достигнута точная синхронизация. Часто используемый алгоритм грубой синхронизации частоты несущей использует символ синхронизации, который имеет специальное спектральное распределение в частотной области. Таким символом синхронизации является, например, последовательность постоянной амплитуды с нулевой автокоррекцией CAZAC. Смещение частоты несущей может быть грубо оценено через сравнение, т.е. корреляцию, спектра мощности принимаемого сигнала со спектром мощности передаваемого сигнала. Все эти соответствующие существующему уровню тех 002748 2 ники алгоритмы работают в частотной области(1996. Для грубой синхронизации частоты несущей предлагалось увеличить интервал между поднесущими таким образом, чтобы расстояние между поднесущими было больше максимальной разности по частоте между принимаемыми и передаваемыми несущими (см. Paul H. Moose,"A Technique for Orthogonal Frequency DivisionTransacti on Communications. Vol. 42, No. 10,Oct. 1994"). Расстояние между поднесущими увеличивается путем уменьшения количества дискретных значений, которые преобразуются при помощи быстрого преобразования Фурье. Это соответствует уменьшению количества значений выборок, которые преобразуются при помощи быстрого преобразования Фурье. Международная заявка WO 9205646 А относится к способам приема сигналов с ортогональным частотным уплотнением и содержащих данные, которые предпочтительно дифференциально кодированы в направлении по временной оси. Уход фазы демодулированных дискретных значений от одного блока к следующему используется для указания величины частотной ошибки гетеродина. Уход фазы оценивается умножением комплексных значений на комплексно-сопряженное значение более ранней выборки, демодулированной из той же несущей с ОЧУ, и использованием полученного в результате измерения для управления частотой гетеродина посредством системы автоматической подстройки частоты. Сущность изобретения Задачей настоящего изобретения является создание способов и устройства для выполнения точной синхронизации частоты, которые обеспечивают точную синхронизацию частоты,компенсирующую девиацию частоты несущей относительно частоты генератора в системе передачи с модуляцией множества несущих(ММН), использующей сигналы ММН, в которых информация закодирована разностью фаз между одновременными поднесущими, имеющими разные частоты. В соответствии с первым аспектом, настоящее изобретение предусматривает способ выполнения точной синхронизации частоты,компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование 3 сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими,имеющими разные частоты, при этом способ включает этапы определения разности между фазами одной и той же несущей в разных символах; определения смещения частоты путем исключения из разности фаз неопределенностей фазового сдвига для получения фазовых сдвигов, обусловленных определением символов с использованием решающего устройства для Мпозиционной фазовой манипуляции (М - ФМ); и выполнения коррекции обратной связи для девиации частоты несущей, исходя из определенного смещения частоты. В соответствии со вторым аспектом настоящее изобретение предусматривает способ выполнения точной синхронизации частоты,компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими,имеющими разные частоты, при этом способ включает этапы определения соответственных фаз одной и той же несущей в разных символах; исключения из фаз неопределенностей фазового сдвига для получения фазовых сдвигов,обусловленных определением символов для определения соответствующих девиаций фазы с использованием решающего устройства для Мпозиционной фазовой манипуляции,определения смещения частоты путем определения разности фаз между девиациями фазы и выполнения коррекции обратной связи для девиации частоты несущей, исходя из определенного смещения частоты. В соответствии с третьим аспектом настоящее изобретение предусматривает устройство для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции множества несущих,обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем устройство содержит средство для определения разности между фазами одной и той же несущей в разных символах; решающее устройство для М-позиционной фазовой манипуляции для определения смещения частоты путем исключения из разности фаз 4 неопределенностей фазового сдвига, относящихся к передаваемой информации; и средство для выполнения коррекции обратной связи девиации частоты, исходя из определенного смещения частоты. В соответствии с четвертым аспектом настоящее изобретение предусматривает устройство для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции множества несущих,обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты,причем устройство содержит средство для определения соответственных фаз одной и той же несущей в разных символах; решающее устройство для М-позиционной фазовой манипуляции для исключения из фаз неопределенностей фазового сдвига, относящихся к передаваемой информации, для определения соответствующих девиаций фазы,средство для определения смещения частоты путем определения разности между девиациями фазы; средство для выполнения коррекции обратной связи для девиации частоты, исходя из определенного смещения частоты. Настоящее изобретение относится к способам и устройству для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора. Эта точная синхронизация частоты предпочтительно выполняется после завершения грубой синхронизации частоты, в результате чего смещения частоты после грубой синхронизации частоты меньше половины расстояния между поднесущими в сигнале ММН. После коррекции смещений частоты с помощью заявленных способов и устройства точной синхронизации частоты может быть использована коррекция смещений частоты путем поворота фазы с дифференциальным декодированием и обратным отображением на временной оси. Смещения частоты определяются путем определения разностей частот между смежными по времени символами поднесущей, расположенными вдоль временной оси. Частотная ошибка вычисляется путем измерения поворотов прямоугольных координат I - Q каждой поднесущей и, в предпочтительных вариантах, усреднения координат по всем n поднесущим символа ММН. Сначала, при помощи решающего устройства для М-позиционной фазовой манипуляции и корреляции выходного сигнала данного устройства с входным сигналом, для соответствующего символа поднесущей устраняется не 5 однозначность или неопределенность фазы. Таким образом, для символа поднесущей определяется фазовое смещение, которое может быть использовано для реструктуризации частотной ошибки в структуре с обратной связью. В другом случае фазовые смещения символов поднесущих одного символа ММН могут усредняться по всем активным несущим символа ММН, и для реструктуризации частотной ошибки используется усредненное фазовое смещение. В соответствии с настоящим изобретением определение смещения частоты выполняется в частотной области. Коррекция обратной связи в соответствии с точной синхронизацией частоты согласно изобретению выполняется во временной области. С этой целью, для обнаружения смещений частоты поднесущих, на основе фаз последовательных по времени символов поднесущей разных символов ММН, используется дифференциальный декодер. Краткое описание чертежей В последующем описании предпочтительные варианты осуществления настоящего изобретения рассмотрены подробно со ссылками на чертежи, на которых представлено следующее: фиг. 1 - схематичное представление системы передачи с модуляцией на основе множества несущих, в которой может быть использовано настоящее изобретение; фиг. 2 А и 2 В - схематичные представления дифференциального отображения по временной оси и дифференциального отображения по частотной оси; фиг. 3 - функциональная блок-схема для выполнения дифференциального отображения по частотной оси; фиг. 4 - представление изменения во времени всех поднесущих в символах ММН; фиг. 5 - совокупность символов с квадратурной фазовой манипуляцией для каждой поднесущей со смещением частоты; фиг. 6 - основная блок-схема, иллюстрирующая положение устройства точной синхронизации частоты, соответствующего изобретению, в приемнике сигнала ММН; фиг. 7 - блок-схема точного детектора частотных ошибок, показанного на фиг. 6; фиг. 8 - блок-схема приемника сигнала ММН, содержащего блок грубой синхронизации частоты и блок точной синхронизации частоты; фиг. 9 - блок-схема блока для выполнения грубой синхронизации частоты; фиг. 10 - схематичное представление опорного символа, используемого для выполнения грубой синхронизации частоты; фиг. 11 - схематичное представление типового сигнала ММН, имеющего кадровую структуру; фиг. 12 - диаграммы рассеяния для выходного сигнала блока дифференциального обратного отображения приемника сигнала ММН, 002748 6 иллюстрирующие эффект коррекции смещений фазы эхо-сигналов; фиг. 13 - блок-схема, иллюстрирующая положение и функции блока коррекции смещений фазы эхо-сигналов; фиг. 14 - блок-схема предпочтительного варианта устройства коррекции смещений фазы эхо-сигналов; фиг. 15 - диаграммы, иллюстрирующие отображение, выполненное с использованием другого алгоритма коррекции смещений фазы эхо-сигналов. Подробное описание предпочтительных вариантов осуществления изобретения Перед подробным обсуждением настоящего изобретения со ссылкой на фиг. 1 описан принцип работы системы передачи с модуляцией множества несущих. Согласно фиг. 1, ссылочной поднесущей 100 обозначен передатчик сигнала ММН, который, по существу, аналогичен известным передатчикам сигналов ММН (см. например, WilliamY. Zou, Yiyan Wu, "COFDM: AN OVERVIEW",IEEE Transactions on Broadcasting, Vol. 41, No.1,March 1995). Источник данных 102 обеспечивает последовательный битовый поток 104 в передатчик сигнала ММН. Входящий последовательный битовый поток 104 подается в блок 106 отображения битов на несущую, который из входящего последовательного битового потока 104 создает последовательность спектров 108. Для создания сигнала ММН 112 во временной области над последовательностью спектров 108 выполняется обратное быстрое преобразование Фурье 110. Сигнал ММН временной области образует полезный символ ММН временного сигнала ММН. Чтобы предотвратить межсимвольную интерференцию, вызванную многолучевым искажением, для вставки защитного интервала фиксированной длины между соседними по времени символами ММН имеется блок 114. В соответствии с предпочтительным вариантом осуществления настоящего изобретения последняя часть полезного символа ММН используется в качестве защитного интервала путем вставки того же интервала перед полезным символом. Результирующий символ ММН обозначен ссылочной позицией 115 на фиг. 1 и соответствует символу ММН 160, изображенному на фиг. 11. На фиг. 11 показано строение типичного сигнала ММН, имеющего кадровую структуру. Один кадр временного сигнала ММН состоит из множества символов ММН 160. Каждый символ ММН 160 образован полезным символом 162 и связанным с ним защитным интервалом 164. Как показано на фиг. 11, каждый кадр содержит один опорный символ 166. Настоящее изобретение может быть выгодно использовано с таким сигналом ММН, однако подобная структура сигнала не является необходимой для реализа 7 ции настоящего изобретения, если передаваемый сигнал включает полезную часть и, по меньшей мере, один опорный символ. Для того чтобы получить окончательную структуру кадра, показанную на фиг. 11, для добавления опорного символа на каждое заранее определенное число символов ММН имеется блок 116. В соответствии с настоящим изобретением опорный символ представляет собой амплитудно-модулированную битовую последовательность. Следовательно, амплитудная модуляция битовой последовательности выполняется таким образом, чтобы огибающая амплитудномодулированной битовой последовательности определяла опорную конфигурацию опорного символа. Эта опорная конфигурация, определенная огибающей амплитудно-модулированной битовой последовательности, должна обнаруживаться при приеме сигнала ММН приемником сигнала ММН. В предпочтительном варианте осуществления настоящего изобретения в качестве амплитудно-модулированной битовой последовательности используется псевдослучайная битовая последовательность, имеющая хорошие автокорреляционные свойства. Выбор длины и частоты повторения опорного символа зависит от свойств канала, по которому передается сигнал ММН, например,времени когерентности канала. Кроме того, частота повторения и длина опорного символа, или другими словами количество полезных символов в каждом кадре, зависит от технических требований приемника, касающихся среднего времени первоначальной синхронизации и среднего времени повторной синхронизации после потери синхронизации из-за замирания канала. Результирующий сигнал ММН, имеющий структуру, обозначенную ссылочной позицией 118 на фиг. 1, подается в ВЧ-блок 120 передатчика. В ВЧ-блоке 120 передатчика выполняется цифро-аналоговое преобразование и преобразование с повышением частоты сигнала ММН. После чего сигнал ММН передается по каналу 122. Со ссылками на фиг. 1 ниже описан принцип работы приемника 130 сигнала ММН. Сигнал ММН принимается в ВЧ-блоке 132 приемника. В этом блоке сигнал ММН преобразуется с понижением частоты, и затем выполняется аналого-цифровое преобразование сигнала, преобразованного с понижением частоты. Преобразованный с понижением частоты сигнал ММН подается в блок 134 синхронизации символьных кадров/частоты несущей. Первой задачей блока 134 синхронизации символьных кадров/частоты несущей является выполнение кадровой синхронизации с использованием амплитудно-модулированного опорного символа. Эта кадровая синхронизация выполняется на основе корреляции между ампли 002748 8 тудно-демодулированным опорным символом и заранее определенной опорной конфигурацией,хранящейся в приемнике сигнала ММН. Второй задачей блока синхронизации символьных кадров/частоты несущей является выполнение грубой синхронизации частоты сигнала ММН. С этой целью блок 134 синхронизации символьных кадров/частоты несущей используется в качестве блока грубой синхронизации частоты для определения грубого смещения частоты несущей, обусловленного, например,разницей частот между гетеродином передатчика и гетеродином приемника. Определенная частота используется для выполнения грубой коррекции частоты. Принцип работы блока грубой синхронизации частоты подробно описан ниже со ссылкой на фиг. 9 и 10. Как описано выше, блок 134 кадровой синхронизации определяет положение опорного символа в символе ММН. На основе этого определения, осуществленного блоком 134 кадровой синхронизации, блок 136 выделения опорного символа выделяет информацию кадрирования,т.е. опорный символ, из символа ММН, поступающего от ВЧ-блока 132 приемника. После выделения опорного символа сигнал ММН подается в блок 138 исключения защитного интервала. Результатом обработки сигнала, выполненной в приемнике сигнала ММН, являются полезные символы ММН. Полезные символы ММН с выхода блока 138 исключения защитного интервала, поступают в блок 140 выполнения быстрого преобразования Фурье для получения из полезных символов последовательности спектров. После чего последовательность спектров поступает в блок 142 отображения несущей на биты, в котором восстанавливается последовательный битовый поток. Этот последовательный битовый поток поступает в приемник 144 данных. Со ссылками на фиг. 2 А и 2 В ниже описаны два принципа дифференциального отображения. Фиг. 2 А иллюстрирует первый способ дифференциального отображения по временной оси. Как видно из чертежа, символ ММН состоит из К поднесущих. Поднесущие имеют разные частоты и, в предпочтительном варианте, расположены на равном расстоянии друг от друга в направлении по частотной оси. При использовании дифференциального отображения по временной оси, один или более битов кодируются в фазовые и/или амплитудные сдвиги между двумя поднесущими с одной и той же центральной частотой в соседних символах ММН. Стрелки,изображенные между символами поднесущих,соответствуют информации, кодированной в виде амплитудных и/или фазовых сдвигов между двумя символами поднесущих. Второй способ дифференциального отображения показан на фиг. 2 В. Настоящее изобретение относится к системе передачи с модуляцией множества несущих, которая использует 9 схему отображения, показанную на фиг. 2 В. Эта схема отображения основана на относительном отображении по частотной оси внутри одного символа ММН. На фиг. 2 В показано несколько символов ММН 200. Каждый символ ММН 200 содержит несколько символов 202 поднесущих. Стрелки 204 на фиг. 2 В иллюстрируют информацию, закодированную между двумя символами 202 поднесущих. Как показано стрелками 204, эта схема отображения основана на дифференциальном отображении в пределах одного символа ММН в направлении по частотной оси. В варианте, показанном на фиг. 2 В, первая поднесущая (k=0) в символе ММН 200 используется в качестве опорной поднесущей 206 (заштрихована), так что информация кодируется между опорной поднесущей и первой активной поднесущей 208. Другая информация символа ММН кодируется, соответственно, между активными поднесущими. Таким образом, для каждого символа ММН существует абсолютный фазовый эталон. В соответствии с фиг. 2 В этот абсолютный фазовый эталон предоставляется опорным символом, вставленным в каждый символ ММН (k=0). Опорный символ может либо иметь постоянную фазу для всех символов ММН, либо фазу, которая изменяется от одного символа ММН к другому. Изменяющаяся фаза может быть получена дублированием фазы из последней поднесущей предшествующего по времени символа ММН. На фиг. 3 показан предпочтительный вариант устройства для выполнения дифференциального отображения по частотной оси. На фиг. 3 показана компоновка символов ММН в частотной области с использованием дифференциального отображения по частотной оси согласно настоящему изобретению. На фиг. 3 показана компоновка одного символа ММН со следующими параметрами:NFFT обозначает количество комплексных коэффициентов дискретного преобразования Фурье и, соответственно, количество поднесущих; К обозначает количество активных несущих. Опорная поднесущая не включена в подсчет для К. Согласно фиг. 3 для отображения битового потока в комплексные символы используется квадратурная фазовая манипуляция (КФМ). Однако возможны и другие схемы Мпозиционного отображения, например, 2 позиционная фазовая манипуляция (2-PSK), 8 позиционная фазовая манипуляция (8-ФМ), 16 позиционная квадратурная амплитудная модуляция (16-КАМ), 16-позиционная амплитуднофазовая манипуляция(64-АФМ) и т.д. Кроме того, для облегчения фильтрации и снижения до минимума эффектов наложения спектров в устройстве, показанном на фиг. 3, 002748 10 некоторые поднесущие для кодирования информации не используются. Эти поднесущие,которые устанавливаются в ноль, образуют так называемые защитные полосы на верхней и нижней границах спектра сигнала ММН. На входе устройства отображения, показанного на фиг. 3, для комплексного сигнала принимаются пары b0[k], b1[k] входящего битового потока. Для формирования одного символа ММН формируется К пар комплексного сигнала. Сигнальные пары кодируются в К относительных фазовых сдвигов phi[k], необходимых для компоновки одного символа ММН. В данном варианте переход (отображение) от Бит к фазовым сдвигам 0, 90, 180 и 270 выполняется с использованием отображения Грэя в устройстве 220 квадратурной фазовой манипуляции. Отображение Грэя используется для предотвращения того, чтобы дифференциальное детектирование фазовых ошибок, меньших 135, вызвало удвоенные битовые ошибки в приемнике. Дифференциальное фазовое кодирование К фаз выполняется в кодере 222 дифференциальной фазы. На этом этапе обработки происходит кодирование К дифференциальных фазphi[k], созданных блоком отображения Грэя,использующего КФМ. В основном, уровень обратной связи 224 вычисляет общую сумму по всем К фазам. В качестве начальной точки для первого расчета (k=0) используется фаза опорной несущей 226. Переключатель 228 обеспечивает подачу в элемент суммирования 230 либо абсолютной фазы опорной поднесущей 226,либо фазовой информации, закодированной в предшествующей (т.е. z-1, где z-1 обозначает оператор задержки на единицу) поднесущей. На выход кодера 222 дифференциальной фазы поступает фазовая информация theta[k], с использованием которой должны быть закодированы соответствующие поднесущие. В предпочтительных вариантах осуществления настоящего изобретения поднесущие символа ММН расположены на равном расстоянии друг от друга в направлении по частотной оси. Выход кодера 222 дифференциальной фазы соединен с блоком 232 для создания комплексных символов поднесущих с использованием фазовой информации theta[k]. С этой целью К дифференциально кодированных фаз преобразуются в комплексные символы путем умножения на где коэффициент обозначает коэффициент масштабирования, а PHI обозначает дополнительный угол. Коэффициент масштабирования и дополнительный угол PHI являются необязательными. При выборе PHI = 45 может быть получена повернутая совокупность сигнала с дифференциальной квадратурной фазовой манипуляцией (ДКФМ). 11 И, наконец, в блоке компоновки 234 осуществляется компоновка символа ММН. Один символ ММН, содержащий NFFT поднесущих,компонуется из NFFT -K-1 символов защитных полос, которые являются "нулями" одного символа опорной поднесущей и К символов поднесущих с ДКФМ. Таким образом, скомпонованный символ ММН 200 составлен из К комплексных значений, содержащих кодированную информацию, двух защитных полос по обеим сторонам NFFT комплексных значений и символа опорной поднесущей. Символ ММН скомпонован в частотной области. Для перехода во временную область блоком преобразования 236 выполняется обратное дискретное преобразование Фурье выходного сигнала блока компоновки 234. В предпочтительных вариантах осуществления настоящего изобретения блок преобразования 236 приспособлен для выполнения быстрого преобразования Фурье. Дальнейшая обработка сигнала ММН в передатчике, также как и в приемнике, описана выше со ссылкой на фиг. 1. Для выполнения операций, обратных операциям устройства отображения, описанного выше со ссылкой на фиг. 3, в приемнике необходимо наличие устройства 142 обратного отображения (фиг. 1). Реализация устройства обратного отображения является простой, и, следовательно, нет необходимости в ее подробном описании. Дифференциальное отображение в направлении по частотной оси подходит для цифровой передачи с множеством несущих по быстро изменяющимся каналам с многолучевым распространением. В соответствии с данной схемой отображения, нет необходимости в стационарности канала, превышающей один символ с множеством несущих. Однако дифференциальное отображение в направлении по частотной оси может создать новую проблему. В условиях многолучевого распространения эхо-сигналы,последующие или предшествующие относительно основного сигнала, могут привести к систематическим фазовым смещениям между поднесущими в одном и том же символе ММН. Следовательно, предпочтительно предусмотреть блок коррекции для устранения таких фазовых смещений. Так как обусловленные каналом фазовые смещения между дифференциально демодулированными символами являются систематическими ошибками, они могут быть скорректированы при помощи некоторого алгоритма. В принципе, такой алгоритм должен вычислять обусловленное эхо-сигналом фазовое смещение относительно пространственной совокупности сигнала после дифференциальной демодуляции и впоследствии корректировать это смещение фазы. Примеры таких алгоритмов коррекции обусловленных эхо-сигналами фаз приведены в 12 конце данного описания со ссылками на фиг. 12-15. Со ссылками на фиг. 4-8 ниже описана точная синхронизация частоты в соответствии с настоящим изобретением. Как упомянуто выше,точная синхронизация частоты согласно настоящему изобретению выполняется после завершения грубой синхронизации частоты. Предпочтительные варианты грубой синхронизации частоты, которая может быть выполнена при помощи блока 134 синхронизации символьного кадра/частоты несущей, описаны ниже со ссылками на фиг. 9 и 10 после описания соответствующей настоящему изобретению точной синхронизации частоты. При точной синхронизации частоты согласно настоящему изобретению могут быть скорректированы смещения частоты, которые меньше половины расстояния между поднесущими. Так как смещения частоты являются низкими и равными для всех поднесущих, проблема точной синхронизации частоты смещается на уровень поднесущих. Фиг. 4 представляет собой общий вид символов ММН 200 на плоскости время-частота. Каждый символ ММН 200 состоит из 432 символов поднесущих с C1 по C432. Символы ММН размещены вдоль временной оси, причем первый символ ММН 200, показанный на фиг. 4, связан с временем T1, следующий символ ММН связан с временем Т 2 и так далее. В соответствии с предпочтительным вариантом осуществления настоящего изобретения точная синхронизация частоты основана на повороте фазы, который вычисляется, используя одну и ту же поднесущую двух символов ММН, которые являются смежными в направлении по временной оси, например C1/T1 и C1/T2. В последующем настоящее изобретение описано со ссылкой на отображение КФМ. Однако очевидно, что настоящее изобретение может быть применено для любого Мпозиционного отображения ФМ, где М обозначает число состояний фазы, используемых для кодирования, например 2, 4, 8, 16 На фиг. 5 представлена комплексная система координат, на которой изображена совокупность КФМ для каждой поднесущей со смещением частоты. Ссылочной позицией 300 обозначены четыре возможных фазовых положения первого символа ММН, символа-1 ММН. При переходе от поднесущей (поднесущей n) этого символа к той же поднесущей следующего символа ММН, т.е. символа-2 ММН, в случае отсутствия смещения частоты положение символа в совокупности КФМ будет оставаться неизменным. При наличии смещения частоты, которое, как упомянуто выше, меньше половины расстояния между поднесущими, это смещение частоты приведет к фазовому повороту совокупности КФМ символа-2 ММН по сравнению с символом-1 ММН. Новая совокупность КФМ,то есть четыре возможных фазовых положения 13 для рассматриваемой поднесущей символа-2 ММН показаны на фиг. 5 со слылочной позицией 302. Этот поворот фазыможет быть получен из следующего уравнения Сn обозначает совокупность КФМ поднесущей n в символе ММН, n представляет собой индекс, изменяющийся в диапазоне от 1 до количества активных поднесущих в символе ММН. Информация, касающаяся смещения частоты, содержится в члене уравнения 2. Это смещение частоты является одинаковым для всех поднесущих. Следовательно, поворот фазытакже является одинаковым для всех поднесущих. Таким образом, может быть выполнено усреднение по всем поднесущим символа ММН. На фиг. 6 показана блок-схема приемника сигнала ММН, в котором реализовано настоящее изобретение. Аналого-цифровой преобразователь 310 предназначен для выполнения аналого-цифрового преобразования сигнала, преобразованного с понижением частоты, который принят ВЧ-блоком 132 приемника (фиг. 1). Выходной сигнал аналого-цифрового преобразователя 310 подается в блок 312 низкочастотного фильтра и прореживателя. Низкочастотный фильтр является фильтром формирования импульса, который идентичен фильтру формирования импульса в передатчике сигнала ММН. В прореживателе сигнал дискретизируется на частоте символа ММН. Как описано выше со ссылками на фиг. 1, защитные интервалы в сигнале ММН исключаются блоком 132 исключения защитного интервала. Защитные интервалы вводятся в передатчике сигнала ММН между двумя символами ММН для предотвращения межсимвольной интерференции, обусловленной памятью канала. Выходной сигнал блока 132 исключения защитного интервала подается в демодулятор ММН 314, который аналогичен блоку 140 выполнения быстрого преобразования Фурье, показанному на фиг. 1. После демодулятора ММН 314 включены блок 316 дифференциального декодирования и блок 318 обратного отображения. В блоке 316 дифференциального декодирования с использованием относительного декодирования восстанавливается фазовая информация. В блоке 318 обратного отображения для реконструкции двоичного сигнала из введенного в данный блок комплексного сигнала выполняется обратное отображение в направлении по частотной оси. Выходной сигнал демодулятора ММН 314 также подается в точный детектор 320 частотных ошибок. На основе выходного сигнала демодулятора ММН точный детектор 320 частотных ошибок генерирует сигнал частотной 14 ошибки. В изображенном варианте выходной сигнал точного детектора 320 частотных ошибок подается в генератор 322 с цифровым управлением через фильтр 324 обратной связи. Фильтр 324 обратной связи представляет собой низкочастотный фильтр для отфильтровывания наложенных высокочастотных интерференционных участков из медленно изменяющегося сигнала ошибки. Генератор 322 с цифровым управлением на основе отфильтрованного сигнала ошибки создает сигнал несущей. Сигнал несущей, созданный генератором 322 с цифровым управлением, используется для коррекции частоты, которая выполняется с использованием комплексного умножителя 326. Входные сигналы в комплексный умножитель 326 представляют собой выходной сигнал блока 312 низкочастотного фильтра и прореживателя и выходной сигнал генератора 322 с цифровым управлением. Ниже, со ссылками на фиг. 7, приведено описание предпочтительного варианта осуществления точного детектора 320 частотных ошибок. Точный детектор 320 частотных ошибок содержит дифференциальный детектор 330 по временной оси. Выходной сигнал демодулятора ММН 314, т.е. выходной сигнал быстрого преобразования Фурье подается на вход дифференциального детектора 330, который выполняет дифференциальное детектирование по временной оси, чтобы получить информацию о смещении частоты из одной и той же поднесущей двух последовательно приходящих символов ММН. В варианте, показанном на фиг. 7, количество активных поднесущих составляет 432. Таким образом, дифференциальный детектор 330 выполняет корреляцию между первым и 433-им дискретным значением. Первое дискретное значение связано с символом-1 ММН (фиг. 5), а 433-е дискретное значение связано с символом 2 ММН (фиг. 5). Однако оба этих дискретных значения связаны с одной и той же поднесущей. С этой целью входной сигнал Yk подается в z-1-блок 332 и затем в блок 334 для формирования комплексной сопряженной величины выходного сигнала z-1-блока 332. Комплексный умножитель 336 размещен для умножения выходного сигнала блока 334 на входной сигналYk. Выходным сигналом умножителя 336 является сигнал Zk. Функция дифференциального детектора разности 330 может быть выражена следующими уравнениями:Yk обозначает выходной сигнал демодулятора ММН 314, т.е. входной сигнал для дифференциального детектора 330, в момент времениk. Zk обозначает выходной сигнал дифференци 15 ального детектора разности 330. К обозначает количество активных несущих. Выходной сигнал Zk дифференциального детектора 330 содержит М - кратно сжатую неопределенность, соответствующую кодируемым фазовым сдвигам. В случае КФМ эта М - кратно сжатая неопределенность является 4 - кратно сжатой неопределенностью, т.е. 0, 90, 180 и 270. Эта неопределенность фазового сдвига устраняется из Zk путем использования решающего устройства 340 с М-ФМ. Такие решающие устройства известны в данной области техники и, следовательно, не требуют отдельного описания. Выходной сигнал решающего устройства 340 представляет собой комплексную сопряженную величину кодируемого фазового сдвига, найденного решающим устройством 340. Этот выходной сигнал решающего устройства 340 коррелируется с выходным сигналом дифференциального детектора 330 путем выполнения комплексного умножения с использованием умножителя 342. Выходной сигнал умножителя 342 представляет собой смещение фазы для соответствующих поднесущих. Эти фазовые смещения для соответствующих поднесущих усредняются в пределах одного символа ММН в блоке усреднения 344 в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Выходной сигнал блока усреднения 344 представляет собой выходной сигнал точного детектора 320 частотных ошибок. Математическое описание этой процедуры является следующим: В соответствии с предпочтительными вариантами осуществления настоящего изобретения контур управления частотой имеет структуру с обратной связью. В варианте, показанном на фиг. 6, цепь обратной связи присоединена между выходом демодулятора ММН 314 и входом блока 132 исключения защитного интервала. На фиг. 8 показана блок-схема приемника сигнала ММН, содержащего блок 350 грубой синхронизации частоты и блок точной синхронизации частоты, который описан выше. Как показано на фиг. 8, для выполнения грубой коррекции частоты и выполнения точной коррекции частоты может быть использован общий комплексный умножитель 326. Как показано на фиг. 8, умножитель 326 может быть размещен перед блоком 312 низкочастотного фильтра и прореживателя. В цепи обратной связи, предназначенной для точной синхронизации частоты, в зависимости от положения умножителя 326 должен быть включен блок хранения. В альтернативном варианте можно использовать два отдельных умножителя для грубой коррекции частоты и точной коррекции частоты. В этом слу 002748 16 чае умножитель для грубой коррекции частоты будет установлен перед блоком низкочастотного фильтра и прореживателя, а умножитель для точной коррекции частоты будет установлен после блока низкочастотного фильтра и прореживателя. Со ссылками на фиг. 9 и 10 ниже описаны предпочтительные варианты осуществления грубой синхронизации частоты. Как показано на фиг. 9, выход ВЧ-блока 132 приемника соединен с аналого-цифровым преобразователем 310. Преобразованный с понижением частоты сигнал ММН на выходе аналогово-цифрового преобразователя 310 дискретизируется и подается в блок 360 кадровой/временной синхронизации. В предпочтительном варианте осуществления изобретения для устранения быстрых флуктуаций канала перед блоком кадровой/временной синхронизации размещен блок быстродействующей автоматической регулировки усиления (не показан). Блок быстродействующей автоматической регулировки усиления используется в дополнение к обычному блоку медленнодействующей автоматической регулировки усиления в тракте прохождения сигнала в случае передачи по каналу с многолучевым распространением с длинным импульсным откликом канала и частотноизбирательным замиранием. Блок быстродействующей АРУ регулирует диапазон средних амплитуд сигнала до известной средней амплитуды опорного символа. Как описано выше,блок кадровой/временной синхронизации использует амплитудно-модулированную последовательность в принятом сигнале для выделения из сигнала ММН информации о кадрировании и затем для исключения из сигнала защитных интервалов. За блоком 360 кадровой/временной синхронизации следует блок 362 грубой синхронизации частоты, который оценивает грубое смещение частоты на основе амплитудно-модулированной последовательности опорного символа сигнала ММН. Чтобы выполнить коррекцию смещения частоты в блоке 364, в блоке 362 грубой синхронизации частоты определяется смещение частоты несущей относительно частоты генератора в приемнике сигнала ММН. Упомянутая коррекция смещения частоты в блоке 364 выполняется при помощи комплексного умножения. Выходной сигнал блока 364 коррекции смещения частоты подается в демодулятор ММН 366, образованный блоком 140 выполнения быстрого преобразования Фурье и блоком 142 отображения несущей на биты, которые показаны на фиг. 1. Для выполнения описанной здесь грубой синхронизации частоты должна быть выполнена амплитудная демодуляция прошедшего предварительную обработку сигнала ММН. Предварительной обработкой может являться, например, 17 преобразование с понижением частоты и аналого-цифровое преобразование сигнала ММН. Результатом амплитудной демодуляции прошедшего предварительную обработку сигнала ММН является огибающая, представляющая собой амплитуду сигнала ММН. Для амплитудной демодуляции может быть использован простой способ аlрhamах+ betamin-. (см.,например, Palaclels A.:DSP-mP Routine ComputesBradley, J. : Magnitude Appoximations for Microprocessor Implementation, IEEE Micro, Vol. 3,5, Oct. 1983). Понятно, что могут быть использованы и другие способы определения амплитуды, отличные от приведенного способа аlphamax+ beta min-. Для упрощения можно свести вычисление амплитуды к определению того, является ли текущая амплитуда большей или меньшей по отношению к средней амплитуде. В этом случае выходной сигнал будет состоять из последовательности -1/+1, которая может использоваться для определения грубого смещения частоты при помощи выполнения корреляции. Эта корреляция может легко быть осуществлена с использованием простой интегральной микросхемы. Кроме того, может быть выполнена супердискретизация сигнала, принятого высокочастотным входным каскадом. Например, принятый сигнал может быть выражен с использованием двукратной супердискретизации. В соответствии с первым вариантом смещение частоты несущей сигнала ММН относительно частоты генератора в приемнике сигнала ММН определяется при помощи корреляции огибающей, полученной путем выполнения амплитудной демодуляции, как описано выше, с заранее определенной опорной конфигурацией. В случае, когда смещение частоты отсутствует, принятый опорный символ r(k) будет иметь следующий вид:SAM - переданная АМ-последовательность. Для упрощения вычислением дополнительного Гауссовского шума можно пренебречь. Тогда В случае, если имеется постоянное смещение частоты f, принятый сигнал будет иметь следующий вид: Информация, касающаяся смещения частоты, получается из корреляции принятого сигнала (k) с АМ-последовательностью SAM, которая в приемнике известна 18 Так как аргумент SAM(k)2 равен нулю,смещение частоты Согласно второму варианту реализации алгоритма грубой синхронизации частоты, как показано на фиг. 10, используется опорный символ, содержащий, по меньшей мере, две идентичные последовательности 370. На фиг. 10 показан опорный символ сигнала ММН, содержащий две идентичные последовательности 370, каждая длиной L/2. L обозначает количество значений двух последовательностей 370 опорного символа. Как показано на фиг. 10 в амплитудномодулированной последовательности имеется,по меньшей мере, две идентичных зоны, предназначенных для грубой синхронизации частоты. Две такие зоны, каждая из которых содержит L/2 дискретных значений, показаны на фиг. 10 в конце амплитудно-модулированной последовательности. Амплитудно-модулированная последовательность содержит большое количество дискретных значений. Для однозначного определения фазы должно быть использовано число дискретных значений, достаточное для включения поворота фазы на 2. На фиг. 10 это число определено как L/2. Далее представлено математическое решение для определения девиации частоты несущей. В соответствии с фиг. 10 для двух идентичных последовательностей 370 применимо следующее уравнение Если смещение частоты отсутствует, принятому сигналу будет соответствовать следующее уравнение 14r(k) обозначает значения из идентичных последовательностей;k представляет собой индекс от единицы до L/2 для соответственных дискретных значений. Если имеется смещение частоты, например, f, принятый сигнал будет следующим(k) обозначает дискретные значения принятого участка, которые основаны на идентичных последовательностях. Информация, касающаяся смещения частоты, получается из корреляции принятого сигнала (k+L/2) с принятым сигналом (k). Эта корреляция задается следующим уравнением: Следовательно, смещение частотыобозначает комплексные сопряженные величины дискретных значений для упомянуто 19 го выше участка. Таким образом, смещение частоты Так как аргумент (k)2 равен нулю, смещение частоты будет Таким образом, понятно, что в обоих описанных выше вариантах частотное положение максимума выходного результата корреляции определяет оцененное значение смещенной несущей. Кроме того, также, как показано на фиг. 9, коррекция выполняется в структуре с прямой связью. В случае канала с сильным уровнем отражения, например из-за высокой плотности застройки, описанных выше корреляций может быть недостаточно для получения приемлемой грубой синхронизации частоты. Следовательно,согласно третьему варианту осуществления настоящего изобретения, соответствующие значения двух участков, которые коррелируются согласно второму варианту осуществления, могут быть взвешены с использованием соответствующих значений хранящихся заранее определенных опорных конфигураций, соответствующих упомянутым двум идентичным последовательностям опорного символа. Это взвешивание может увеличить до максимума вероятность правильного определения смещения частоты. Математическое описание этого взвешивания является следующимSAM обозначает амплитудномодулированную последовательность, которая в приемнике известна, а SAM обозначает ее комплексную сопряженную. Если вышеприведенные корреляции вычисляются в частотной области, то используется не аргумент, а величина Определяется максимальное значение этой величины как функция коррекции частоты. Положение максимума определяет оценку девиации частоты. Как упомянуто выше, коррекция выполняется в структуре с прямой связью. Предпочтительные варианты выполнения коррекции вызванных эхо-сигналами фазовых смещений при использовании дифференциального отображения по частотной оси будут описаны ниже со ссылкой на фиг. 12-15. Систематические фазовые сдвиги, обусловленные эхо-сигналами, в условиях многолучевого распространения могут возникать между поднесущими в одном и том же символе ММН. При демодуляции символа ММН в при 002748 20 емнике эти фазовые смещения могут привести к ошибкам в битах. Следовательно, для коррекции систематических фазовых сдвигов, обусловленных эхо-сигналом в условиях многолучевого распространения, предпочтительно использовать некоторый алгоритм. На фиг. 12 показаны диаграммы рассеяния на выходе блока обратного дифференциального отображения приемника сигнала ММН. Как можно видеть из левой части фиг. 12, систематические фазовые сдвиги между поднесущими в одном и том же символе ММН вызывают поворот демодулированных фазовых сдвигов относительно осей комплексной системы координат. В правой части фиг. 12 изображены демодулированные фазовые сдвиги после выполнения коррекции вызванных эхо-сигналами фазовых смещений. Теперь положения точек сигнала, по существу, находятся на осях комплексной системы координат. Эти положения соответствуют модулированным фазовым сдвигам 0, 90, 180 и 270, соответственно. Алгоритм (ЕРОС) коррекции вызванных эхо-сигналами фазовых смещений должен вычислять возбужденное эхо-сигналом смещение фазы относительно пространственной совокупности сигнала после дифференциальной демодуляции и затем корректировать это смещение фазы. В целях иллюстрации можно предложить простейший из возможных алгоритмов, который удаляет фазу символа перед вычислением среднего значения всех фаз поднесущих. Для иллюстрации эффекта от такого ЕРОС-алгоритма,можно сослаться на две диаграммы рассеяния для символов поднесущих, содержащихся в одном символе ММН, показанные на фиг. 12. Эти диаграммы рассеяния получены в результате моделирования системы с модуляцией ММН. Для моделирования использован канал, который может в типовом случае существовать в сетях с единой частотой. Эхо-сигналы этого канала доходили до границ защитного интервала МСМ. В этом случае защитный интервал был выбран равным 25% от длительности символа ММН. На фиг. 13 представлена блок-схема для иллюстрации положения и функций устройства коррекции вызванных эхо-сигналами фазовых смещений в приемнике сигнала ММН. Сигнал передатчика сигнала ММН передается по каналу 122 (фиг. 1 и 13) и принимается ВЧ-блоком 132 приемника сигнала ММН. Обработка сигнала между ВЧ-блоком приемника и блоком 140 выполнения быстрого преобразования Фурье на фиг. 13 опущена. Выходной сигнал блока выполнения быстрого преобразования Фурье подается в блок обратного отображения, который выполняет дифференциальное обратное отображение по частотной оси. Выходным сигналом блока обратного отображения являются соответствующие фазовые сдвиги для поднесущих. Фазовые смещения этих фазовых сдвигов, 21 которые вызываются эхо-сигналами в условиях многолучевого распространения, показаны при помощи блока 400 на фиг. 13, который демонстрирует пример диаграммы рассеяния для символов поднесущих при отсутствии коррекции вызванных эхо-сигналами фазовых смещений. Выходной сигнал блока 142 обратного отображения подается на вход устройства 402 коррекции вызванных эхо-сигналами фазовых смещений. Для устранения вызванных эхосигналами фазовых смещений в выходном сигнале блока 142 обратного отображения устройство 402 коррекции вызванных эхо-сигналами фазовых смещений использует алгоритм ЕРОС. Результат показан в блоке 404 на фиг. 13, т.е. на выходе устройства коррекции 402 присутствуют только закодированные фазовые сдвиги 0, 90,180 и 270. На выходе устройства коррекции 402 формируется сигнал для вычисления метрики, которое выполняется для восстановления битового потока, представляющего собой передаваемую информацию. Со ссылками на фиг. 14 ниже описаны первый вариант осуществления алгоритма ЕРОС и устройство для его выполнения. Исходной точкой первого варианта алгоритма ЕРОС является предположение, что каждый принятый дифференциально декодированный комплексный символ из-за наличия эхосигналов в канале с многолучевым распространением повернут на некоторый угол. Предполагается, что поднесущие расположены с равным интервалом между ними по частоте, так как это представляет предпочтительный вариант. Если бы поднесущие были расположены с разными интервалами по частоте, в алгоритм ЕРОС должен был быть введен корректирующий коэффициент. На фиг. 14 изображено устройство коррекции 402 (фиг. 13) для выполнения первого варианта алгоритма ЕРОС. Сначала, из выходного сигнала блока 142 обратного отображения, который, как показано,например, в левой части фиг. 12, содержит вызванное эхо-сигналом фазовое смещение, должны быть исключены фазовые сдвиги, относящиеся к передаваемой информации. С этой целью выходной сигнал блока 142 обратного отображения подается в блок сброса 500. В случае отображения ДКФМ блок сброса может выполнять операцию "(.)4". Блок 500 проецирует все принятые символы в первый квадрант. Следовательно, из фазовых сдвигов, представляющих символы поднесущих, удаляются фазовые сдвиги, относящиеся к передаваемой информации. Тот же эффект мог бы быть достигнут с использованием операции сложения по модулю 4. После удаления в блоке 500 фаз символов,относящихся к информации, первым подходом для получения оценки было бы простое вычисление среднего значения для фаз всех символов одного символа ММН. Однако перед определе 002748 22 нием среднего значения для фаз всех символов одного символа ММН предпочтительно выполнить определение порога. Из-за рэлеевского замирания некоторые из принятых символов могут внести в определение вызванного эхосигналом смещения фазы ненадежную информацию. Следовательно, в зависимости от абсолютного значения символа, определение порога выполняется для того, чтобы решить, должен ли данный символ учитываться при оценке смещения фазы или нет. Поэтому в вариант, показанный на фиг. 14,включен блок 510 определения порога. После блока 500 соответственно в блоках расчета 512 и 514 рассчитываются абсолютное значение и аргумент дифференциально декодированного символа. В зависимости от абсолютного значения соответствующего символа возникает сигнал управления. Этот сигнал управления сравнивается с пороговым значением в схеме 516 принятия решения. Если абсолютное значение,т.е. его сигнал управления, меньше некоторого порога, схема 516 принятия решения заменяет значение угла, поступающее на операцию усреднения, значением, равным нулю. Для этой цели имеется переключатель, который разрывает цепь между выходом блока 514 расчета аргумента и входом каскада дальнейшей обработки и соединяет вход каскада дальнейшей обработки с блоком 518, имеющим на выходе постоянный "ноль". Блок усреднения 520 обеспечивает вычисление среднего значения на основе фазовых смещений i, определенных для символов индивидуальных поднесущих символа ММН, следующим образом В блоке усреднения 520 выполняется суммирование К слагаемых. Выходной сигнал блока усреднения 520 подается в блок хранения 522, который сохраняет (запоминает) выходной сигнал блока усреднения 520 К раз. Выход блока хранения 522 соединен с блоком 524 поворота фазы, который выполняет коррекцию фазовых смещений К точек комплексного сигнала на основе среднего значения . Блок 524 поворота фазы выполняет коррекцию фазовых смещений, используя следующее уравнение В этом уравнении 'k обозначает К дифференциально декодированных символов с откорректированной фазой для использования в вычислении мягкой метрики, a k обозначает вводимые символы. До тех пор, пока можно считать, что канал является квазистационарным на интервале длительности одного символа ММН,использование среднего значения для всех поднесущих одного символа ММН будет обеспечивать правильные результаты. 23 Для буферизации точек комплексного сигнала до тех пор, пока не будет определено среднее значение фазовых смещений для одного символа ММН, может быть размещен буферный блок 527. Выходной сигнал блока 524 поворота фазы подается в каскад 526 дальнейшей обработки для вычисления мягкой метрики. Результаты описанной выше коррекции вызванных эхо-сигналами фазовых смещений можно пояснить со ссылкой на фиг. 12. Два графика являются результатом моделирования,включающего описанный выше первый вариант осуществления алгоритма коррекции вызванных эхо-сигналами фазовых смещений. В момент измерения диаграммы рассеяния, показанной в левой части фиг. 12, канал очевидным образом исказил совокупность сигналов таким образом,что простой поворот на угол является достоверным допущением. Как показано в правой части фиг. 12, совокупность сигналов может быть развернута обратно по отношению к оси путем использования для поворота дифференциально детектированных символов определенного среднего значения. Ниже описан второй вариант осуществления алгоритма коррекции вызванных эхосигналами фазовых смещений. Этот второй вариант предпочтительно может быть использован в условиях каналов с многолучевым распространением, которые имеют до двух сильных эхо-сигналов. Алгоритм второго варианта является более сложным, чем алгоритм первого варианта. Ниже представлено математическое решение для второго варианта способа коррекции вызванных эхо-сигналами фазовых смещений. Для облегчения объяснения второго варианта алгоритма ЕРОС могут быть сделаны следующие допущения. В этом варианте предполагается, что защитный интервал сигнала ММН имеет, по меньшей мере, такую же длительность, что и импульсная характеристика h[q], q = 0, 1, , Qh-1 канала с многолучевым распространением. В передатчике каждый символ ММН компонуется с использованием рассмотренного выше отображения по частотной оси. Символ опорной поднесущей равен 1, т.е. фазовому сдвигу 0. Возможный фазовый сдвиг PHI равен нулю, т.е. совокупность сигналов ДКФМ не повернута. Используя уравнение, это можно выразить как: где- комплексный символ приращения фазы; m = 0,1,2,3 - номер символа, который получается из пар по 2 бита кодирования Грэя; 24 В приемнике на выходе дискретного преобразования Фурье переменные решения получаются при условии, что является дискретным преобразованием Фурье импульсной характеристики канала h[q] в положении k. При аk2=1 относительная демодуляция дает Для приемника вводится член k дополнительной фазы, который будет использоваться для коррекции систематического смещения фазы, вызванного каналом. Следовательно, переменная окончательного решения в приемнике Как можно видеть из уравнения 28, полезная информация аkinc взвешивается с использованием произведения(поворот и эффективная передаточная функция канала). Это произведение должно иметь вещественное значение для свободного от ошибок детектирования. С учетом этого наилучшим является выбор угла поворота равным отрицательному аргументу НkНk-1. Чтобы получить требуемый алгоритм для двухлучевых каналов, в следующем разделе будет исследована природа Нk.Нk-1. Предполагается, что двухлучевой канал порождает два эхо-сигнала с ненулевым уровнем энергии, т.е., по меньшей мере, два доминантных эхо-сигнала. Это предположение дает импульсную характеристику где с 1, c2 - комплексные коэффициенты, представляющие эхо-сигналы;q0 - задержка второго эхо-сигнала относительно первого эхо-сигнала; 0 - импульс Дирака; 0[k]=1 для k = 0 0[k]=0 в других случаях Передаточная функция канала получается путем применения к уравнению 29 дискретного преобразования Фурье С учетом уравнения 30 эффективная передаточная функция для относительной демодуляции по оси частот Предполагая свободный от шума двухлучевой канал, из уравнения 31 можно видеть, что символы на стороне приемника располагаются по прямой линии в случае, если послан символ 1+j0 (см. допущение выше). Эта прямая линия может характеризоваться точкой 25 и вектором который определяет ее направление. При сделанных выше допущениях может быть выполнено следующее геометрическое решение. Более подходящая форма записи для геометрического решения второго варианта алгоритма ЕРОС получается, если действительная часть комплексной плоскости обозначается как х = Rez, а мнимая часть как у = Imz, соответственно, т.е. z = х + jy. При такой новой форме записи прямая линия, на которой принятые символы будут лежать в случае свободного от шума двухлучевого канала Дополнительный шум будет приводить к разбросу символов поблизости от прямой линии, заданной уравнениями 34-36. В этом случае уравнение 36 представляет собой кривую регрессии для скопления символов. Для геометрического решения второго варианта алгоритма ЕРОС угол k из уравнения 28 представляется как функция квадрата расстояния рассматриваемого символа от точки начала координат Уравнение 37 показывает, что общее пространство сигнала искажено (путем кручения),однако при этом расстояния от точки начала координат сохраняются. Для получения алгоритма по второму варианту, fк(.) должна быть определена таким образом, чтобы все переменные решения 'k(предполагая отсутствие шума) совпали с действительной осью Дальнейшие преобразования уравнения 38 ведут к квадратному уравнению, которое решается для получения решения для k. В случае двухлучевого канала коррекция вызванных эхо-сигналами фазовых смещений для данной переменной решения 'k: 26 На двух графиках на фиг. 15 показана проекция алгоритма ЕРОС по второму варианту для первого квадранта комплексной плоскости. Здесь изображены квадратная сетка в сектореarg(z)/4 и прямая линия у = f(x) = а + bх, при а=-1,0 и b=0,5 (пунктирная линия). В случае свободного от шума канала, если будет передан символ 1+j0, то все принятые символы будут лежать на этой прямой линии. Показанная на графиках окружность определяет граничную линию для двух случаев уравнения 40. В левой части фиг. 15 показана ситуация до проецирования, в правой части фиг. 5 показана ситуация после применения алгоритма проецирования. Из левой части можно видеть, что прямая линия теперь лежит на действительной оси, причем,2+j0 является исходной точкой проекции. Следовательно, можно сделать вывод, что алгоритм коррекции вызванных эхо-сигналами фазовых смещений, соответствующий второму варианту,выполняет задачу проектирования. Перед применением второго варианта алгоритма ЕРОС нужно определить аппроксимирующую линию, проходящую через принятые символы, т.е. должны быть оценены параметры а и b. С этой целью предполагается, что принятые символы попадают в сектор arg(z)/4,если передан символ 1+j0. Если переданы символы, отличные от 1+j0, для проецирования всех символов в требуемый сектор должны быть применены арифметические операции по модулю. Подобные действия устраняют необходимость нахождения решений для символов на раннем этапе и делают возможным усреднение по всем точкам сигнала одного символа ММН(вместо усреднения только по 1/4 от всех точек сигнала). Для следующего далее правила расчета для алгоритма ЕРОС по второму варианту, xi используется для обозначения действительной части i-той точки сигнала, a yi - для обозначения ее мнимой части, соответственно (i = 1,2 К). Всего для определения имеется К значений. При выборе метода наименьших квадратов прямая линия, которая должна быть определена, может быть получена нахождением минимума Решение уравнения 41 имеется в открытой литературе. Оно имеет следующий вид где средние значения Из двух возможных решений упомянутого выше квадратного уравнения уравнение 40 является единственным решением, которое не может вызвать дополнительный фазовый сдвиг на 180. Если необходимо, может быть применен способ оценки с более высокой устойчивостью,однако ценой гораздо более высокой сложности расчетов. 27 Чтобы избежать проблемы в диапазоне, в котором применимо проецирование, определение прямой линии должно быть разделено на две части. Сначала центры тяжести скопления символов сдвигаются на оси, затем пространство сигнала искажается. Предполагая, что а и b исходные параметры прямой линии, а-угол поворота, fк(.) должна быть использована с преобразованными параметрами Кроме двух рассмотренных выше в разделе алгоритмов ЕРОС могут быть разработаны различные алгоритмы, которые, однако, наиболее вероятно будут отличаться более высокой степенью сложности расчетов. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих,обеспечивающий дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем способ включает этапы а) определения разности между фазами одной несущей в разных символах,б) определения смещения частоты путем исключения из разности фаз с использованием решающего устройства для М-позиционной фазовой манипуляции неопределенностей фазового сдвига, относящихся к передаваемой информации, и в) выполнения коррекции обратной связи для девиации частоты несущей на основе определенного смещения частоты. 2. Способ выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих,обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем способ включает этапы а) определения соответствующих фаз одной несущей в разных символах,б) исключения из упомянутых фаз с использованием решающего устройства для Мпозиционной фазовой манипуляции неопределенностей фазового сдвига, относящихся к передаваемой информации, для определения соответствующих девиаций фазы,в) определения смещения частоты путем определения разности фаз между девиациями фазы и 28 г) выполнения коррекции обратной связи для девиации частоты несущей на основе определенного смещения частоты. 3. Способ по п.1, отличающийся тем, что этапы (а) и (б) выполняют для множества несущих в упомянутых символах,усредненное смещение частоты определяют путем усреднения упомянутых определенных смещений частоты множества несущих и коррекцию обратной связи для девиации частоты выполняют на этапе (в) на основе упомянутого усредненного смещения частоты. 4. Способ по п.2, отличающийся тем, что этапы (а), (б) и (в) выполняют для множества несущих в упомянутых символах,усредненное смещение частоты определяют путем усреднения упомянутых определенных смещений частоты множества несущих и коррекцию обратной связи для девиации частоты выполняют на основе упомянутого усредненного смещения частоты. 5. Способ по п.1, отличающийся тем, что этап (а) включает этап определения разности между фазами одной и той же несущей в символах, которые являются смежными в направлении по временной оси. 6. Способ по п.1, отличающийся тем, что этап (б) включает этап устранения неопределенностей фазового сдвига, соответствующих М-позиционным фазовым сдвигам. 7. Способ по п.2, отличающийся тем, что этап (а) включает этап определения соответствующих фаз одной и той же несущей в символах, которые являются смежными в направлении по временной оси. 8. Способ по п.2, отличающийся тем, что этап (б) включает этап устранения Мпозиционных фазовых сдвигов. 9. Устройство для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем устройство содержит средство для определения разности фаз между фазами одной и той же несущей в разных символах,решающее устройство для М-позиционной фазовой манипуляции, соединенное с выходом упомянутого средства для определения разности фаз, для определения смещения частоты путем устранения из разности фаз неопределенностей фазового сдвига, относящихся к передаваемой информации, и средство, соединенное с выходом упомянутого решающего устройства для Мпозиционной фазовой манипуляции, для выпол 29 нения коррекции обратной связи для девиации частоты несущей на основе определенного смещения частоты. 10. Устройство для выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции множества несущих, обеспечивающей дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем устройство содержит средство для определения соответствующих фаз одной и той же несущей в разных символах,решающее устройство с М-позиционной фазовой манипуляцией, соединенное с выходом упомянутого средства для определения соответствующих фаз, для устранения из упомянутых фаз неопределенностей фазового сдвига, относящихся к передаваемой информации, для определения соответствующих девиаций фазы,средство, соединенное с выходом упомянутого решающего устройства с Мпозиционной фазовой манипуляцией, для определения смещения частоты путем определения разности фаз между девиациями фазы и средство, соединенное с выходом упомянутого средства для определения смещения частоты, для выполнения коррекции обратной связи для девиации частоты на основе определенного смещения частоты. 11. Устройство по п.9, отличающееся тем,что дополнительно содержит средство для определения усредненного смещения частоты путем усреднения определенных смещений часто 002748 30 ты множества несущих, причем средство для выполнения коррекции обратной связи выполняет коррекцию обратной связи для девиации частоты на основе упомянутого усредненного смещения частоты. 12. Устройство по п.10, отличающееся тем,что дополнительно содержит средство для определения усредненного смещения частоты путем усреднения определенных смещений частоты множества несущих, причем средство для выполнения коррекции обратной связи выполняет коррекцию обратной связи для девиации частоты на основе упомянутого усредненного смещения частоты. 13. Устройство по п.9, отличающееся тем,что упомянутое средство для определения разности фаз содержит средство для определения разности фаз между фазами одной и той же несущей в символах, которые являются смежными в направлении по временной оси. 14. Устройство по п.10, отличающееся тем,что упомянутое средство для определения соответствующих фаз содержит средство для определения соответствующих фаз одной и той же несущей в символах, которые являются смежными в направлении по временной оси. 15. Устройство по п.9, отличающееся тем,что упомянутое средство для выполнения коррекции обратной связи для девиации частоты содержит генератор с цифровым управлением и комплексный умножитель. 16. Устройство по п.15, отличающееся тем,что упомянутое средство для выполнения коррекции обратной связи для девиации частоты дополнительно содержит низкочастотный фильтр, включенный перед генератором с цифровым управлением.
МПК / Метки
МПК: H04L 27/26
Метки: множества, частоты, системах, синхронизации, устройство, способ, несущих, точной, демодуляции
Код ссылки
<a href="https://eas.patents.su/18-2748-sposob-i-ustrojjstvo-dlya-tochnojj-sinhronizacii-chastoty-v-sistemah-demodulyacii-mnozhestva-nesushhih.html" rel="bookmark" title="База патентов Евразийского Союза">Способ и устройство для точной синхронизации частоты в системах демодуляции множества несущих</a>
Грубая синхронизация частоты в системах с множеством несущих

Номер патента: 2529
Опубликовано: 27.06.2002
Авторы: Герхойзер Хайнц, Буххольц Штефан, Эберляйн Эрнст, Хойбергер Альберт, Бадри Сабах, Липп Штефан
МПК: H04L 27/26
Метки: несущих, системах, частоты, синхронизация, грубая, множеством
Формула / Реферат:
1. Способ выполнения грубой синхронизации частоты, компенсирующий девиацию частоты несущей относительно частоты генератора в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, причем способ включает этапы приема сигнала, преобразования принятого сигнала с понижением частоты,...
Коррекция смещения фазы эхо-сигнала в системе демодуляции множества несущих
Номер патента: 2528
Опубликовано: 27.06.2002
Авторы: Буххольц Штефан, Эберляйн Эрнст, Герхойзер Хайнц, Бадри Сабах, Хойбергер Альберт, Липп Штефан, Фишер Роберт
МПК: H04L 27/26
Метки: фазы, демодуляции, системе, смещения, коррекция, эхо-сигнала, множества, несущих
Формула / Реферат:
1. Способ коррекции смещения фазы эхо-сигнала в системе демодуляции множества несущих, включающий этапы, при которых выполняют дифференциальное фазовое декодирование (142) сдвигов по фазе на основе разности фаз между одновременно используемыми несущими, имеющими различные частоты, определяют смещение фазы эхо-сигнала для каждого декодированного сдвига по фазе путем устранения (500) неопределенностей сдвигов по фазе, которые относятся к...
Структура кадра и синхронизация частоты для систем с множеством несущих
Номер патента: 2611
Опубликовано: 27.06.2002
Авторы: Эберляйн Эрнст, Хойбергер Альберт, Буххольц Штефан, Бадри Сабах, Липп Штефан, Герхойзер Хайнц
МПК: H04L 27/26
Метки: кадра, несущих, множеством, частоты, структура, систем, синхронизация
Формула / Реферат:
1. Способ формирования сигнала, со структурой кадра, причем каждый кадр структуры кадра содержит, по меньшей мере, один полезный символ, защитный интервал, связанный, по меньшей мере, с одним полезным символом, и опорный символ, включающий этапы, при которых выполняют амплитудную модуляцию битовой последовательности, причем огибающая амплитудно-модулированной битовой последовательности определяет опорную комбинацию опорного символа, и...
Устройство и способ демодуляции многоуровневого сигнала.
Номер патента: 985
Опубликовано: 28.08.2000
Авторы: Сато Сатоси, Имамура Такеси
МПК: H04L 25/06
Метки: устройство, многоуровневого, способ, демодуляции, сигнала
Формула / Реферат:
1. Устройство демодуляции многоуровневого сигнала, содержащее - аналого-цифровой преобразователь для преобразования входного аналогового многоуровневого сигнала в цифровой сигнал; - устройство распознавания уровня цифрового сигнала посредством сравнения цифрового сигнала с совокупностью данных пороговых уровней, соответствующей множеству уровней входного аналогового сигнала; - устройство усреднения первых цифровых сигналов, соответствующих...
Способ и устройство для модуляции/демодуляции с ограничением длины последовательных минимальных серий
Номер патента: 2209
Опубликовано: 28.02.2002
Авторы: Накагава Т, Синпуку Й, Схаухамер Имминк Корнелис А., Накамура К, Наохара Т, Калман Йозеф А.Х.М., Ван Ден Энден Гейсберт Й.
МПК: G11B 20/14, H03M 5/14
Метки: способ, ограничением, длины, устройство, серий, последовательных, минимальных
Формула / Реферат:
1. Устройство модуляции для преобразования данных с базовой длиной данных m в неравномерный код (d, k; m, n; r) с базовой длиной n бит, где d - минимальная, а k - максимальная предельная величина длины серии, упомянутое устройство модуляции, отличающееся тем, что имеет средство преобразования для преобразования входных данных в код в соответствии c таблицей преобразования, причем упомянутая таблица преобразования устанавливает правило...
Предыдущий патент: Система электроснабжения
Следующий патент: Одноразовый шприц
Случайный патент: Биологически активная добавка