Рабочая стрела, в частности, для больших манипуляторов и автобетононасосов


Формула / Реферат
1. Рабочая стрела, содержащая поворотную головку (21), установленную на шасси (11) с возможностью вращения вокруг вертикальной оси (13), по меньшей мере три секции (1-4), установленные с возможностью ограниченного поворота вокруг горизонтальных параллельных друг другу осей (А, В, С, D) складывания относительно поворотной головки (21) или соседней секции посредством приводных агрегатов (22-25), предпочтительно дистанционно управляемое управляющее устройство для движения стрелы с помощью относящихся к отдельным приводным агрегатам (22-25) исполнительных органов, несколько датчиков для измерения путей или углов, относящихся к одной из секций (1-4), осей (А, В, С, D) складывания, вертикальной оси (13) и/или одному из приводных агрегатов (22-25), причем управляющее устройство содержит срабатывающую от выходных данных по меньшей мере одного из датчиков предохранительную программу, и предусмотрен по меньшей мере один датчик (42, 44) давления или усилия, а предохранительная программа содержит срабатывающий от выходных данных датчика давления или усилия обрабатывающий блок (56), отличающаяся тем, что на конце по меньшей мере одного из выполненных в виде гидроцилиндров приводных агрегатов со стороны дна и/или штока расположен один из датчиков (42, 44) давления или усилия; предохранительная программа содержит память данных для хранения заданного аналитически или в виде таблицы поля данных из предельных значений (FGrenz) давления или усилия в зависимости от относящихся к одной из секций стрелы результатов измерений (e1) путей или углов, причем обрабатывающий блок (56) содержит компаратор, к которому подаются выходные данные соответствующего датчика (54) пути или угла и соответствующего датчика (42, 44) давления или усилия или производной от них величины (FZyl) для сравнения с соответствующими данными (FGrenz) предельных значений из поля данных и для подачи сигнала в случае данных предельных значений ниже или выше заданных.
2. Рабочая стрела, содержащая поворотную головку (21), установленную на шасси (11) с возможностью вращения вокруг вертикальной оси (13), первую секцию (1), установленную с возможностью ограниченного поворота вокруг горизонтальной оси (А) складывания относительно поворотной головки (21) посредством приводного агрегата (22), по меньшей мере одну дополнительную секцию (2, 3, 4), установленную с возможностью продольного перемещения вдоль оси сдвига относительно соседней секции посредством соответствующего приводного агрегата и/или с возможностью поворота вокруг горизонтальной оси (В, С, D) складывания, предпочтительно дистанционно управляемое управляющее устройство для движения стрелы с помощью относящихся к отдельным приводным агрегатам (22-25) исполнительных органов, несколько датчиков для измерения путей или углов, относящихся каждый к одной из секций (1, 2, 3, 4) стрелы осей (А, В, С, D) складывания, вертикальной оси (13) и/или одному из рабочих агрегатов (22-25), причем управляющее устройство содержит срабатывающую от выходных данных по меньшей мере одного из датчиков предохранительную программу, и предусмотрен по меньшей мере один датчик (42, 44) давления или усилия, а предохранительная программа содержит срабатывающий от выходных данных датчика давления или усилия обрабатывающий блок (56), отличающаяся тем, что на конце по меньшей мере одного из выполненных в виде гидроцилиндров приводных агрегатов со стороны дна и/или штока расположен один из датчиков (42, 44) давления или усилия; предохранительная программа содержит память данных для хранения заданного аналитически или в виде таблицы поля данных из предельных значений (FGrenz) давления или усилия в зависимости от относящихся к одной из секций стрелы результатов измерений (e1) пути или угла, причем обрабатывающий блок (56) содержит компаратор, к которому подаются выходные данные соответствующего датчика (54) пути или угла и соответствующего датчика (42, 44) давления или усилия или производной от них величины (FZyl) для сравнения с соответствующими данными (FGrenz) предельных значений из поля данных и для подачи сигнала в случае данных предельных значений ниже или выше заданных.
3. Стрела по п.2, отличающаяся тем, что первая секция (1) установлена с возможностью поворота относительно поворотной головки (21) примерно на 90° с помощью выполненного в виде гидроцилиндра приводного агрегата (22).
4. Стрела по одному из пп.2 или 3, отличающаяся тем, что с концом первой секции (1) с возможностью поворота вокруг горизонтальной оси (В, С, D) складывания шарнирно соединена консоль, состоящая по меньшей мере из одной дополнительной секции (2, 3, 4).
5. Стрела по п.2, отличающаяся тем, что первая секция (1) соединена с несколькими сегментами (1a-1f), установленными с возможностью телескопического продольного перемещения по отношению друг к другу.
6. Стрела по п.5, отличающаяся тем, что с концом последнего продольно перемещаемого сегмента (1f) шарнирно соединена по меньшей мере одна консоль, состоящая из нескольких установленных с возможностью поворота по отношению друг к другу вокруг горизонтальных осей (В-Е) складывания секций (2-5).
7. Стрела по одному из пп.1-6, отличающаяся тем, что по меньшей мере на одной секции на расстоянии от оси (А) складывания первой секции (1) расположен огибной блок (80), через который пропущен трос (82) с приемным органом (84) для размещения подвижного груза, причем на тросе (82) расположен датчик (86) давления или усилия, выход которого соединен с обрабатывающим блоком (56) предохранительной программы.
8. Стрела по одному из пп.1-7, отличающаяся тем, что на оси (А) складывания соответствующей секции (1) расположен по меньшей мере один датчик (54) угла.
9. Стрела по одному из пп.1-7, отличающаяся тем, что на соответствующем, выполненном в виде гидроцилиндра (22-25) приводном агрегате секции (1-4) расположен по меньшей мере один датчик пути.
10. Стрела по одному из пп.1-9, отличающаяся тем, что на приводном агрегате или в зоне вертикальной оси (13) поворотной головки (21) расположен дополнительный датчик пути или угла, причем хранящееся в памяти данных предохранительной программы аналитически или в виде таблицы поле данных из предельных значений (FGrenz) давления или усилия коррелировано с относящимися к поворотной головке результатами измерений пути или угла.
11. Стрела по одному из пп.1-10, отличающаяся тем, что по меньшей мере один из исполнительных органов выполнен с возможностью срабатывания от сигнала, поданного предохранительной программой при превышении предельных данных, при совершении предохранительного движения или аварийной остановки.
12. Стрела по одному из пп.1-11, отличающаяся тем, что управляющее устройство содержит срабатывающий от результатов измерений пути или угла регулятор положения для движения стрелы.
13. Стрела по одному из пп.1-12, отличающаяся тем, что по меньшей мере на одной из секций расположен геодезический датчик угла для проведения отнесенных к секции измерений пути или угла.
14. Стрела по п.13, отличающаяся тем, что на поворотной головке (21) дополнительно расположен геодезический датчик угла для измерения относящегося к поворотной головке, привязанного к земле значения угла.
15. Стрела по п.13 или 14, отличающаяся тем, что на шасси (11) дополнительно расположен геодезический датчик угла для измерения по меньшей мере одного относящегося к шасси, привязанного к земле значения угла.
16. Стрела по одному из пп.13-15, отличающаяся тем, что геодезические датчики угла выполнены в виде срабатывающих от гравитации Земли датчиков угла наклона.
17. Стрела по одному из пп.13-16, отличающаяся тем, что управляющее устройство содержит системную программу для пересчета привязанных к земле, отнесенных к секции стрелы результатов измерений углов в углы (ei) складывания.
18. Стрела по одному из пп.1-17, отличающаяся тем, что управляющее устройство содержит гаситель колебаний для секций распределительной стрелы, срабатывающий от зависящих от времени результатов измерений путей или углов и/или от результатов измерений давлений или усилий.

Текст
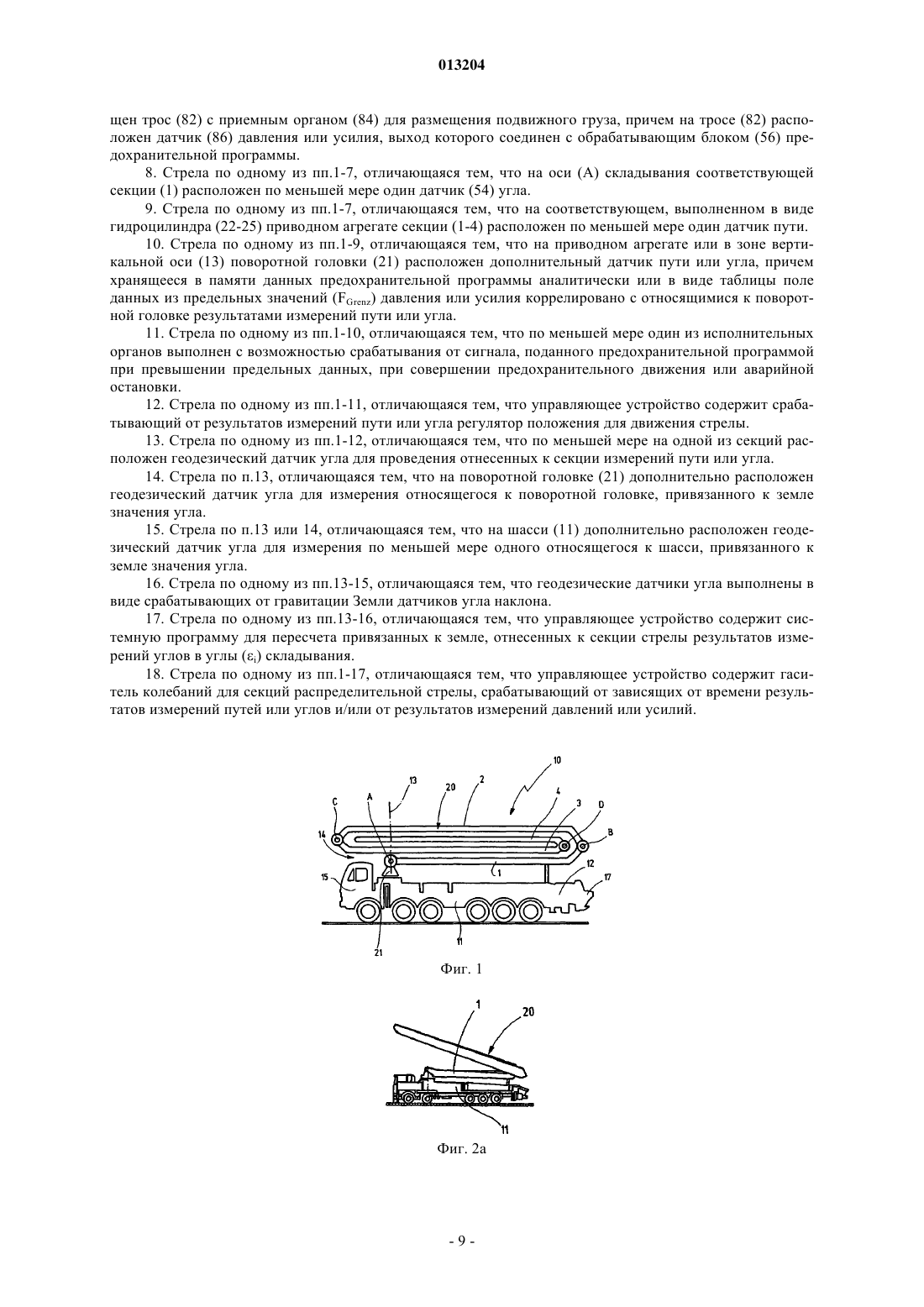
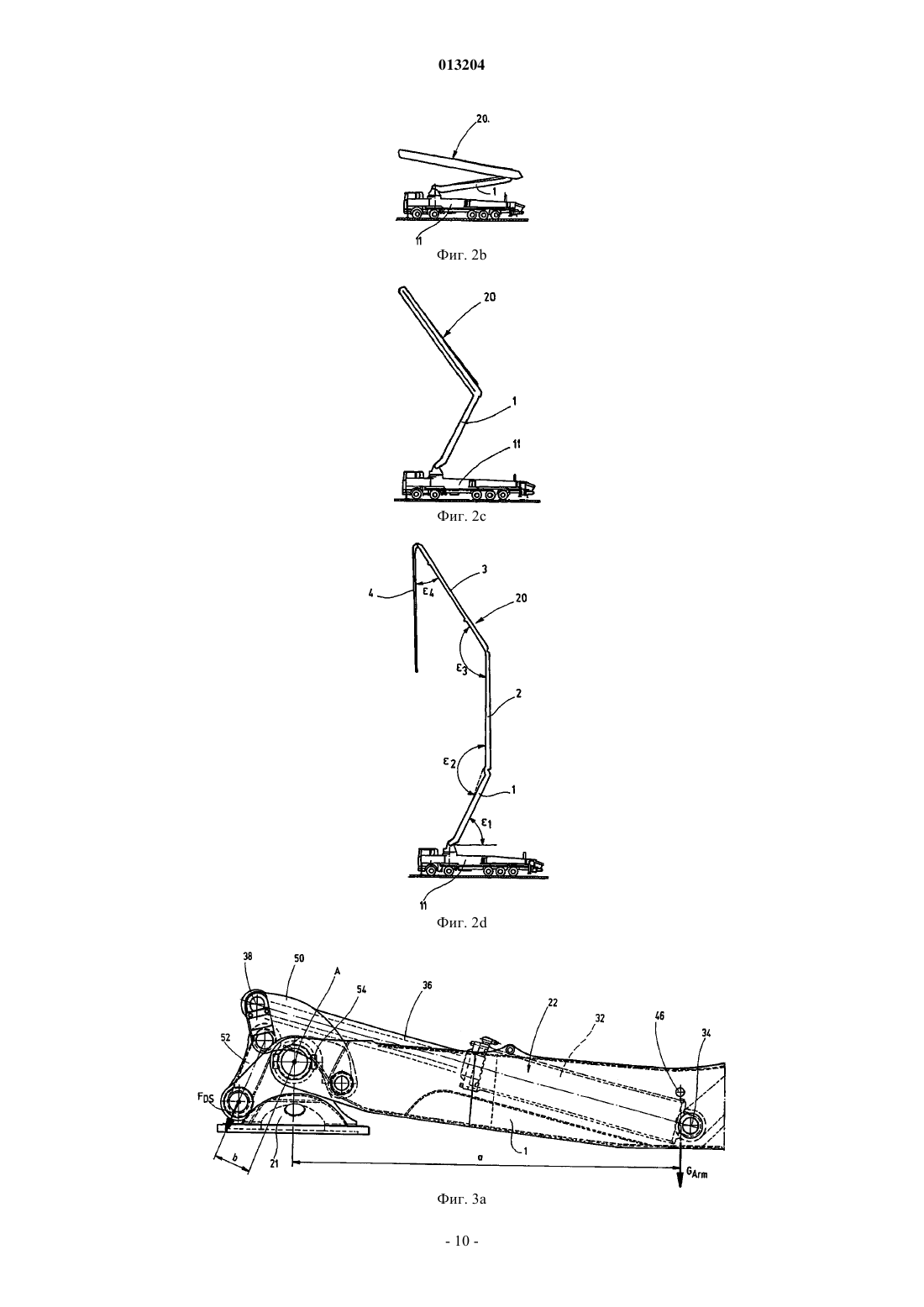
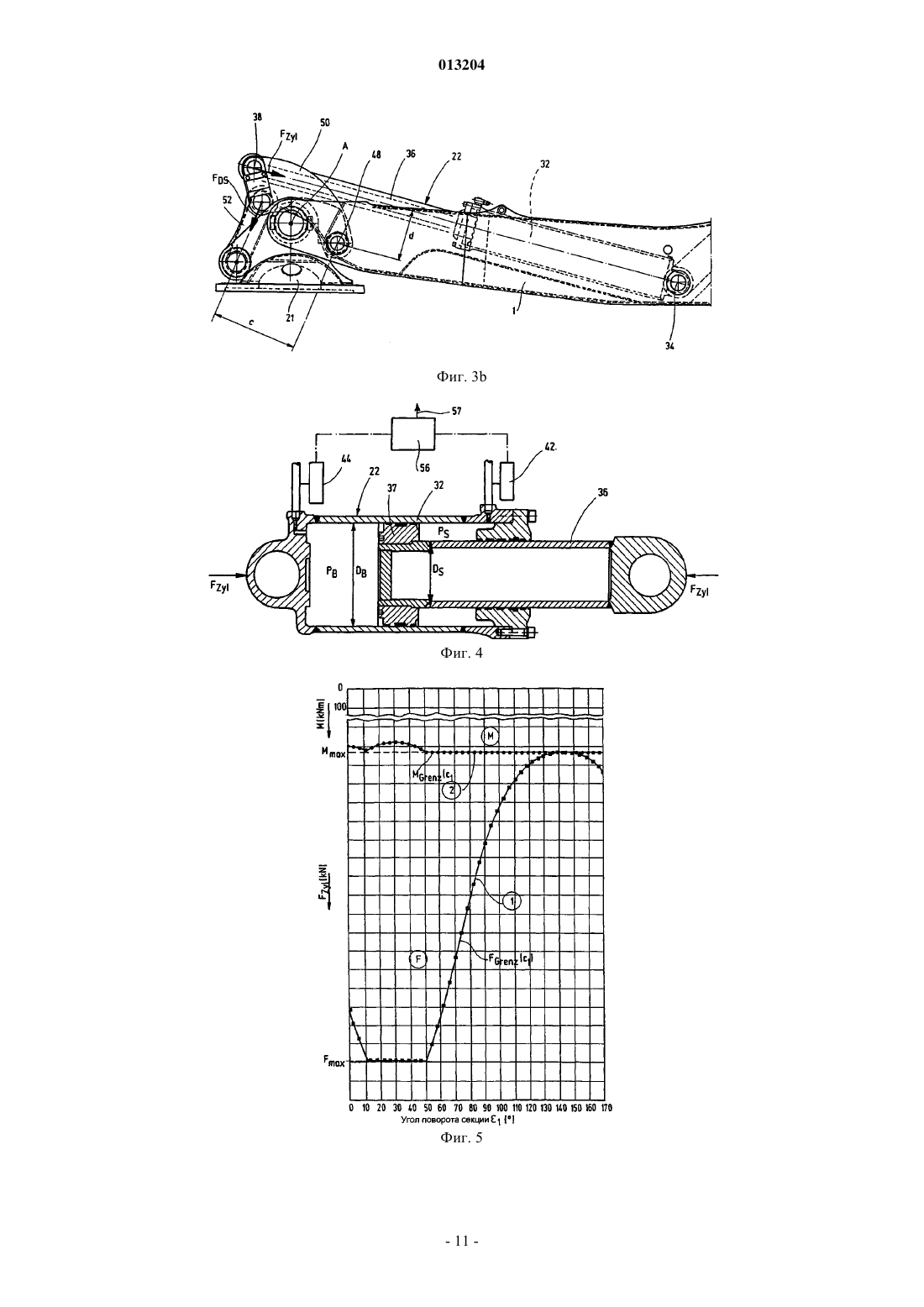
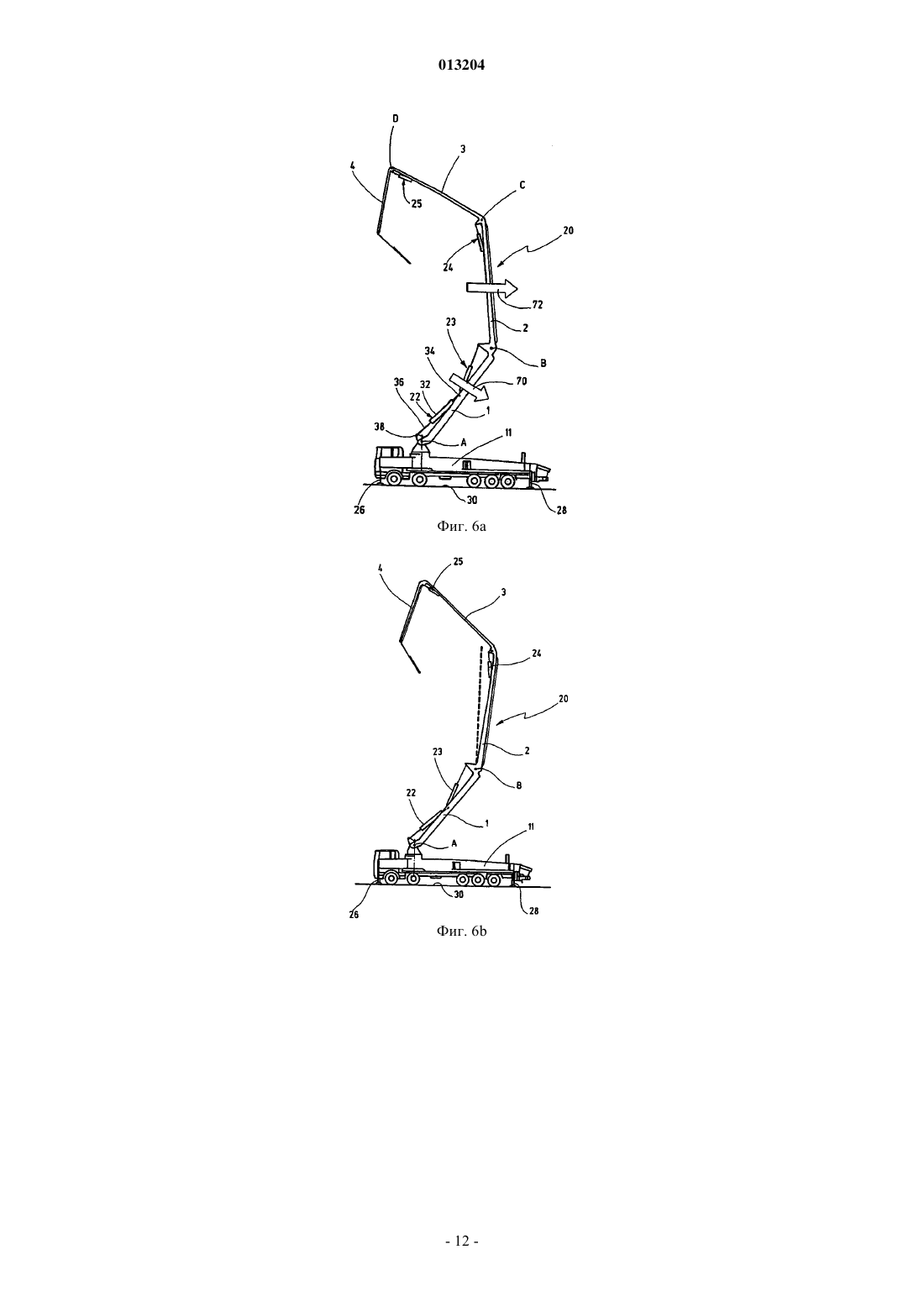
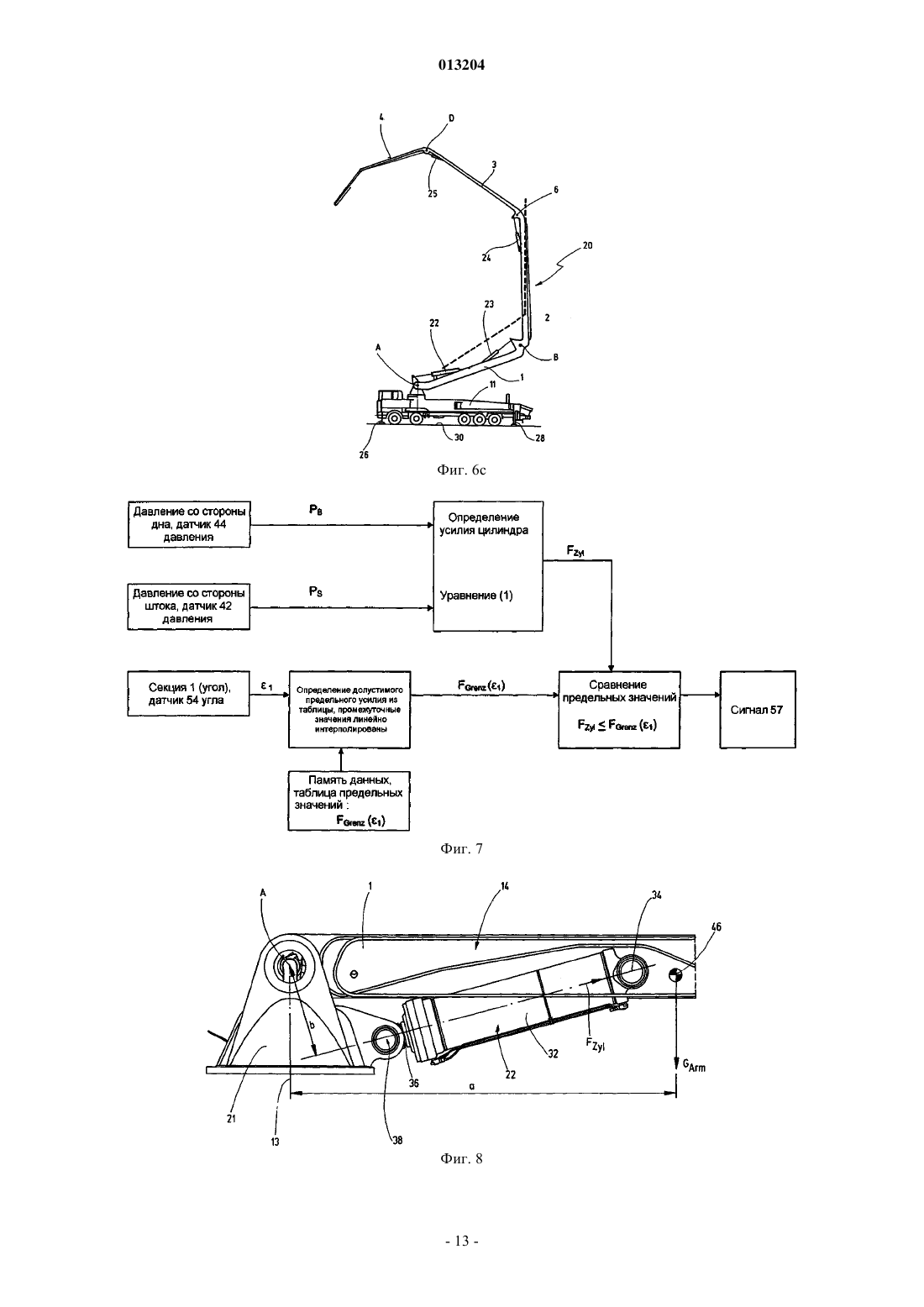
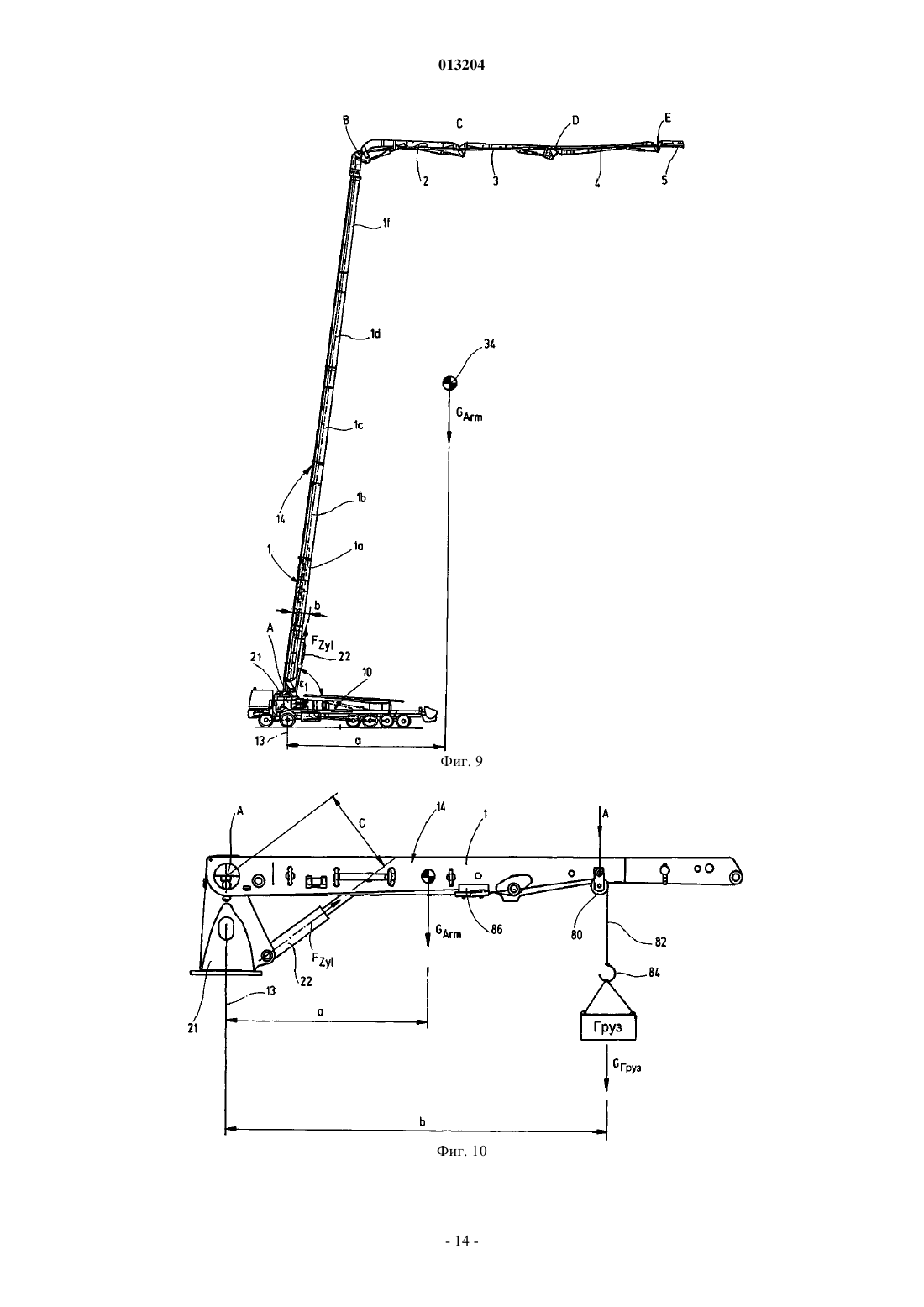
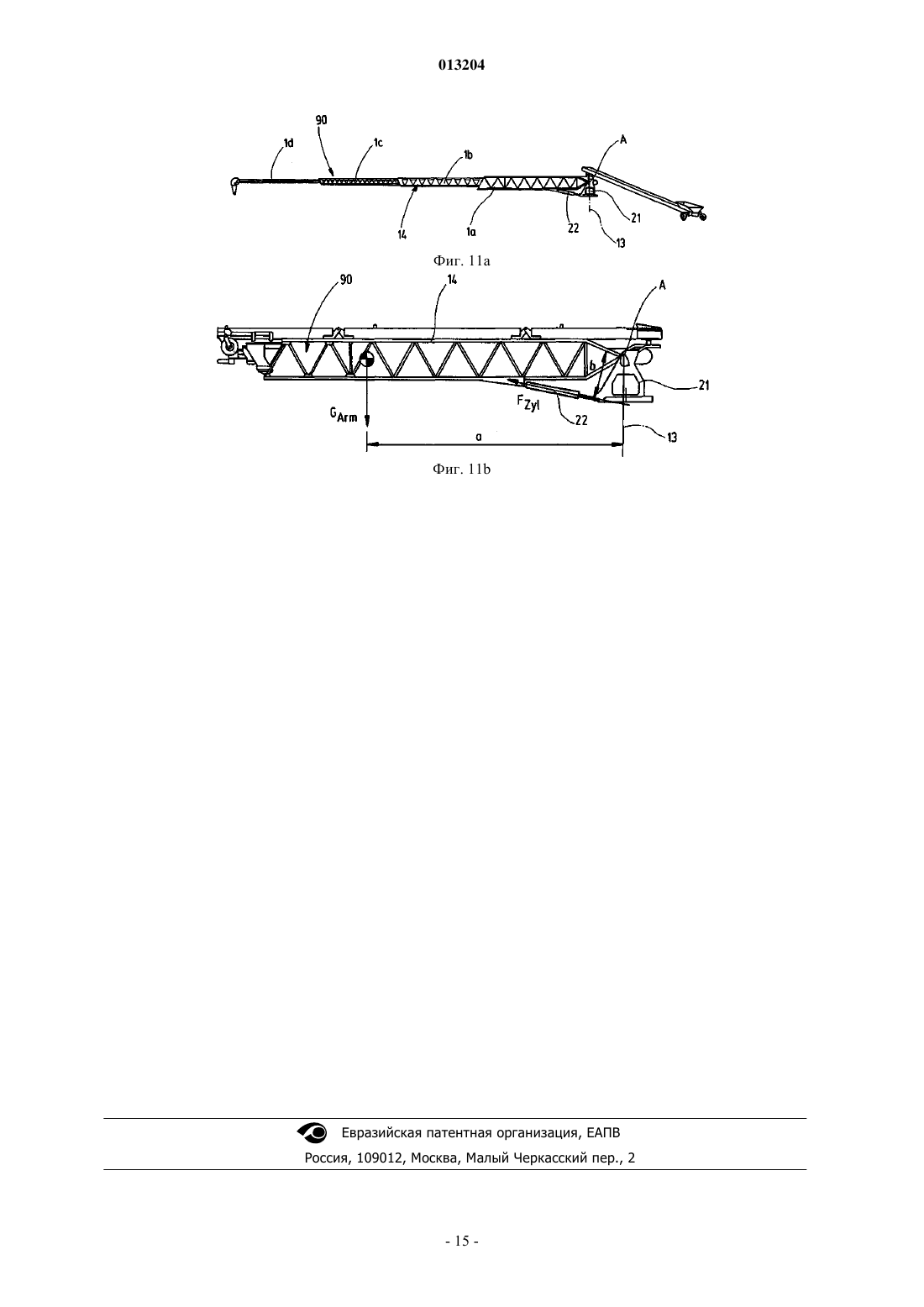
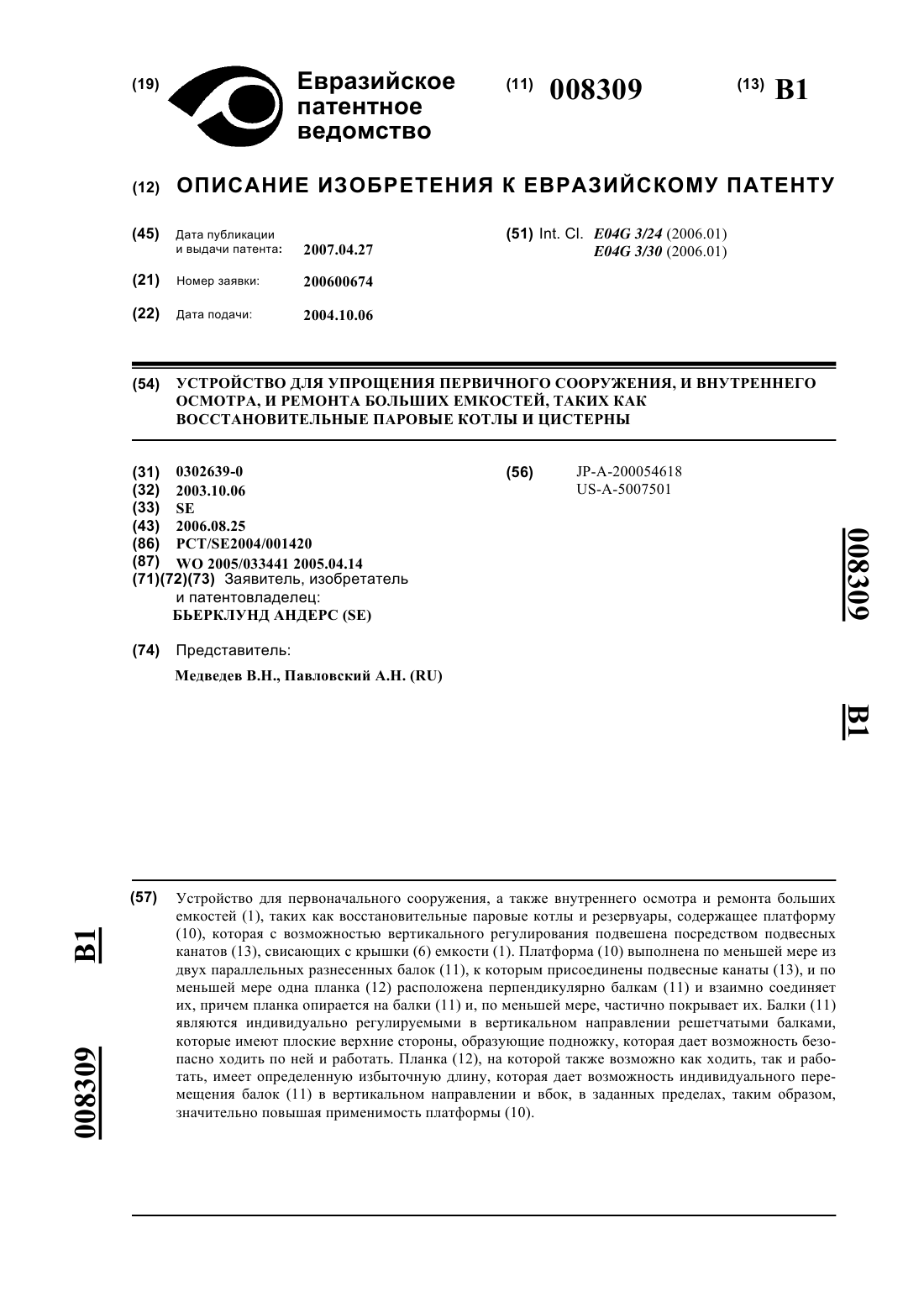
013204 Изобретение относится к рабочей стреле описанного в ограничительных частях пп.1 и 2 формулы рода. Известные рабочие стрелы состоят, по существу, из поворотной головки, установленной на шасси с возможностью вращения вокруг вертикальной оси, первой секции, установленной с возможностью ограниченного поворота вокруг горизонтальной оси складывания относительно поворотной головки посредством приводного агрегата, и по меньшей мере одной дополнительной секции, установленной с возможностью продольного перемещения вдоль оси сдвига относительно соседней секции посредством соответствующего приводного агрегата и/или с возможностью поворота вокруг горизонтальной оси складывания. Для движения стрелы предусмотрено предпочтительно дистанционно управляемое управляющее устройство, содержащее приданные отдельным приводным агрегатам исполнительные органы. Кроме того, предусмотрен по меньшей мере один датчик для измерения пути или угла, который придан по меньшей мере одной из секций стрелы, осей сдвига и/или складывания, вертикальной оси и/или одному из рабочих агрегатов. Далее, на конце со стороны дна и/или поршневого штока по меньшей мере одного из выполненных в виде гидроцилиндров приводных агрегатов расположены датчики давления или усилия. Выходные данные по меньшей мере одного датчика для измерения пути или угла и датчиков давления и усилия обрабатываются в блоке обработки стандартной предохранительной программы в процессе движения стрелы. Рабочие стрелы этого рода используются предпочтительно в больших манипуляторах, автобетононасосах со складной или раздвижной стрелой и в передвижных раздвижных транспортных устройствах. Автобетононасосы обслуживаются обычно оператором, который посредством блока дистанционного управления отвечает как за управление стрелой, так и за позиционирование расположенного на вершине складной мачты концевого рукава. Для этого оператор должен приводить в действие несколько вращательных степеней свободы складной стрелы с помощью соответствующих приводных агрегатов при ее движении в неструктурированном трехмерном рабочем пространстве с соблюдением краевых условий строительной площадки. Для облегчения манипулирования в этом отношении уже предлагалось исполнительное устройство (DE-A-4306127), в котором резервные оси складывания складной стрелы в ее любом положении поворота независимо от ее оси вращения сообща управляются с помощью единственного установочного процесса блока дистанционного управления. Основной предпосылкой такого приведения в действие складной стрелы является регулирование положения, к которому относится в том числе сенсорика для измерения пути и угла, приданная отдельным секциям стрелы, осям складывания и/или рабочим агрегатам. Поскольку нельзя полностью исключить сбоев в технических системах этого рода,включающих в себя механические, электронные и гидравлические компоненты, требуется контроль безопасности, который предупреждал бы оператора и вмешивался бы в процесс функционирования. Для этого необходимо с помощью датчиков обнаруживать и оценивать возникающие дефекты, чтобы избежать нежелательных последствий и повреждений. Предохранительные устройства этого рода уже использовались в связи с регулированием положения внутри складной стрелы (DE-A-10107107), например,чтобы реагировать на включенное состояние питающего клапана, наличие или отсутствие заданных ходовых параметров через устройство дистанционного управления, возникновение относящихся к пути или углу чрезмерных рассогласований или повышенных скоростей таких рассогласований, а также на чрезмерные угловые скорости. Целью настоящего изобретения является контроль предельных нагрузок в отношении прочности и устойчивости. Эта проблема возникает в складных стрелах, секции которых в сложенном состоянии сложены по типу надголовной, складываемой сворачиванием стрелы. Надголовные, складываемые сворачиванием стрелы имеют, правда, то преимущество, что раскладывание стрелового пакета происходит относительно просто и плавно. В противоположность другим видам складывания стреловой пакет, прилегающий в транспортном состоянии своей первой секцией к шасси, можно поднимать вокруг оси А складывания в первом квадранте, а оттуда после второго квадранта поворачивать в рабочую зону. Однако при раскладывании здесь возникают проблемы, и прежде всего, из-за того, что первая секция приводится в действие гидроцилиндром, цилиндр которого шарнирно соединен с секцией стрелы, а поршневой шток - с отклоняющим рычагом поворотной головки. Это означает, что гидроцилиндр при подъеме первой секции нагружается напорным маслом со стороны поршневого штока, так что для создания необходимого для этого усилия из-за выполненной в виде кольцевой поверхности меньшей поверхности поршня требуется соответственно высокое давление. К тому же в точке крепления поршневого штока в зоне поршня могут возникнуть проблемы с прочностью. Поскольку к первой секции стрелы прилегает весь остальной стреловой пакет, для повышения прочности необходима кинематика разворачивания, чтобы можно было поднять первую секцию. Далее по геометрическим причинам следует учесть, что пакет секций надголовной, складываемой сворачиванием стрелы в сложенном состоянии выдается за кабину. При подъеме необходимо, следовательно, сначала освободить пакет секций, чтобы не произошло столкновения с кабиной. По этой причине необходим поворот остального пакета секций вокруг оси В складывания,а именно, на определенный угол, например 20. Только после этого первая секция при еще сложенном остальном пакете секций может быть поднята вокруг шарнира А на предельный угол около 65. В традиционных системах там находится концевой выключатель, который в рабочем состоянии независимо от-1 013204 положения остальных секций заботится о том, чтобы предельный угол первой секции для прочности и устойчивости составлял не меньше 65. При раскладывании остального пакета секций по этой же причине следует учесть, что также секция 2 может быть ориентирована вертикально, что соответствует угловому положению относительно секции 1 около 155. Также на секции 2 находится концевой выключатель, который заботится о том, чтобы она в крайнем случае стояла вертикально. Вертикальное положение включается, например, выполненным в виде ртутного выключателя выключателем наклона. Верхние секции, напротив, ограничены в своем диапазоне поворота только конструктивными мерами. В соответствии с этим также секция 3 с диапазоном поворота 180 в случае вертикального положения секции 2 будет ориентирована вертикально. При использовании заданных концевых выключателей недостаток в том, что шарнир А в рабочем состоянии нельзя раскрыть на угол меньше 65, а это при выполнении определенных задач бетонирования воспринимается как препятствие. То же относится и к шарниру В, поскольку и вертикальность не всегда является идеальным положением для процесса бетонирования. Эти заданные параметры оказались слишком жесткими. Они не позволяют полностью воспользоваться возможностями кинематики, а ограничивают движение стрелы упорядоченным, однако не всегда практичным образом. Исходя из этого, в основе изобретения лежит задача создания конструктивного принципа, который позволил бы устранить жесткие границы при приведении в действие рабочей стрелы и обеспечил бы более гибкие манипулирование и возможность движения ее секций. Для решения этой задачи предложена приведенная в п.1 формулы совокупность признаков. Предпочтительные варианты и модификации изобретения приведены в зависимых пунктах. Решение исходит из той идеи, что предохранительное устройство включает в себя соответствующую сенсорику для текущего определения результатов измерения положения и усилия внутри рабочей стрелы и содержит предохранительную программу, которая устанавливает связь между собой полученных результатов измерений при условии соблюдения заданных предельных значений прочности и/или устойчивости системы. При этом дополнительно играет роль расчет насоса в отношении максимального допустимого напора. Поскольку предельные значения прочности и устойчивости в решающей степени зависят от текущей конфигурации стрелы и тем самым от текущих результатов измерений пути и угла ее отдельных секций, необходимые для контроля безопасности предельные значения могут быть заданы в аналитической форме или в виде таблиц при оценке кинематических отношений. В соответствии с этим согласно изобретению, в первую очередь, предложено, что предохранительная программа включает в себя память данных с заданным аналитически или в виде таблицы полем данных из предельных значений давления или усилия в зависимости от относящихся по меньшей мере к одной из секций стрелы результатов измерений пути или угла, и блок обработки содержит компаратор, к которому подаются выходные данные датчиков давления или усилия и соответствующих датчиков пути или угла и производные от них величины для сравнения с соответствующими данными предельных значений из поля данных и для подачи сигнала в случае данных предельных значений ниже или выше заданных. Согласно одному предпочтительному варианту осуществления изобретения датчик пути расположен на соответствующем, выполненном в виде гидроцилиндра приводном агрегате секции стрелы. В качестве альтернативы этому датчик угла расположен в зоне оси складывания соответствующей секции стрелы. Чтобы включить в систему контроля также устойчивость, что, прежде всего, важно в случае одностороннего узкого опирания несущего складную стрелу шасси, согласно одному предпочтительному варианту осуществления изобретения предложено, что на приводном агрегате или на оси вращения поворотной головки расположен дополнительный датчик пути или угла, и хранящееся в памяти данных предохранительной программы аналитически или в виде таблицы поле данных из предельных значений давления или усилия дополнительно коррелировано с относящимися к поворотной головке результатами измерений путей или углов. Другой предпочтительный вариант осуществления изобретения предусматривает, что на секциях стрелы расположены геодезические датчики углов для определения относящихся к отдельным секциям привязанных к земле результатов измерений углов. Кроме того, на поворотной головке и/или на шасси может быть предусмотрен дополнительный геодезический датчик угла для измерения по меньшей мере одного относящегося к поворотной головке или шасси, привязанного к земле значения угла. В этом случае системная программа целесообразно содержит преобразователь координат для пересчета привязанных к земле, отнесенных к секции стрелы результатов измерений углов в углы складывания отдельных секций. Другой предпочтительный вариант осуществления изобретения предусматривает, что по меньшей мере один из исполнительных органов срабатывает от поданного предохранительной программой при превышении предельных данных сигнала, совершая предохранительное движение или аварийную остановку. Согласно другой предпочтительной модификации изобретения управляющее устройство содержит срабатывающий от измерений путей или углов регулятор положения для движения стрелы.-2 013204 Другой предпочтительный вариант осуществления изобретения предусматривает, что управляющее устройство содержит срабатывающий от зависимых от времени результатов измерений путей или углов и/или от результатов измерений давлений или усилий гаситель колебаний для секций распределительной стрелы. Выше изобретение пояснялось, прежде всего, на примере бетонораспределительной стрелы, выполненной в виде надголовной, складываемой сворачиванием стрелы. Изобретение не ограничено этим вариантом, а может применяться также в рабочих стрелах других конструкций и применений. Ниже приведены некоторые примеры: рабочие стрелы, в которых первая секция установлена с возможностью поворота относительно поворотной головки примерно на 90 при помощи выполненного в виде гидроцилиндра приводного агрегата. К ним относятся, помимо выполненных в виде складных и/или раздвижных бетонораспределительных стрел, также раздвижные подающие стрелы для передвижных подающих устройств; рабочие стрелы, в которых с концом первой секции с возможностью поворота вокруг горизонтальной оси сочленена состоящая по меньшей мере из одной дополнительной секции консоль. К ним относятся, в частности, выполненные в виде складной стрелы бетонораспределительные стрелы; рабочие стрелы, в которых первая секция соединена с несколькими телескопически продольно перемещаемыми по отношению друг к другу секциями. К ним относятся, прежде всего, раздвижные подающие устройства для влажных и сухих материалов; рабочие стрелы, в которых с концом продольно перемещаемых секций сочленена по меньшей мере одна консоль, составленная из нескольких поворотных по отношению друг к другу вокруг горизонтальных осей секций. К ним относятся, прежде всего, складные стрелы, в которых одна из секций выполнена раздвижной; рабочие стрелы, в которых по меньшей мере на одной секции на расстоянии от оси поворота первой секции расположен огибной блок, через который пропущен трос с органом для размещения подвижного груза, причем на тросе расположен датчик давления или усилия, выход которого соединен с обрабатывающим блоком предохранительной программы. В таком случае изобретение обеспечивает контроль безопасности рабочей стрелы с учетом висящего на тросе груза. Ниже изобретение более подробно поясняется с помощью чертежей, на которых изображено следующее: фиг. 1 - вид сбоку автобетононасоса с рабочей стрелой, выполненной по типу надголовной, складываемой сворачиванием стрелы, в сложенном транспортном состоянии; фиг. 2 а-d - кинематическая схема разворачивания надголовной свертываемой сворачиванием стрелы с традиционным предохранительным устройством; фиг. 3 а - фрагмент секции 1 надголовной, складываемой сворачиванием стрелы с указанием размеров для определения внешнего мгновенного равновесия (частичная система 1); фиг. 3b - то же, что и на фиг. 3 а, с указанием размеров для определения внутреннего мгновенного равновесия (частичная система 2); фиг. 4 - разрез гидроцилиндра секции 1 с указанием размеров для расчета усилия цилиндра; фиг. 5 - две диаграммы, касающиеся предельного момента в шарнире А (верхняя кривая) и допустимых усилий цилиндра (нижняя кривая) в зависимости от угла вращения секции 1 вокруг оси А складывания; фиг. 6 а - надголовная, складываемая сворачиванием стрела в рабочем состоянии в предельном положении по традиционным критериям безопасности; фиг. 6b и с - надголовная, складываемая сворачиванием стрела по фиг. 6 а в допустимых рабочих положениях по критериям безопасности, согласно изобретению; фиг. 7 - блок-схема предохранительной программы; фиг. 8 - фрагмент секции 1 стандартной бетонораспределительной стрелы с максимальным углом складывания 90 вокруг оси А складывания; фиг. 9 - вид сбоку распределительной стрелы автобетононасоса с раздвижной секцией 1; фиг. 10 - фрагмент вида сбоку рабочей стрелы с функцией крана; фиг. 11 а и b - вид сбоку подающего устройства для влажных или сухих материалов с поворотной головкой и раздвижной рабочей стрелой. Прежде всего, изобретение поясняется с помощью изображенного на фиг. 1, 2a-d, 6 а-с примера выполнения автобетононасоса с надголовной, складываемой сворачиванием стрелой. Показанный на фиг. 1, 2a-d и 6 а-d автобетононасос 10 содержит многоосное шасси 11 с кабиной 15,шламовым насосом 12 и установленной с возможностью вращения вокруг неподвижной относительно транспортного средства вертикальной оси 13 рабочей стрелой 14 в качестве держателя бетоновода (не показан). По бетоноводу жидкий бетон, непрерывно загружаемый в приемный бункер 17 во время бетонирования, подается к месту бетонирования, расположенному на удалении от местонахождения шасси 11.-3 013204 Рабочая стрела 14 состоит из поворотной головки 21, установленной с возможностью вращения вокруг вертикальной оси 13 посредством гидропривода вращения, и установленной на ней с возможностью поворота складной стрелы 20, непрерывно настраиваемой на изменяющийся вылет и разность по высоте между шасси 11 и местом бетонирования. В данном примере выполнения стрела состоит из четырех шарнирно соединенных между собой секций 1-4, выполненных с возможностью поворота вокруг осей A-D складывания, проходящих параллельно друг другу и перпендикулярно вертикальной оси 13 поворотной головки 21. Углы 1-4 складывания (фиг. 2d) образованных осями A-D складывания складных шарниров и их расположение по отношению друг к другу согласованы между собой с возможностью укладки рабочей стрелы 14 на шасси 11 в компактном транспортном положении по фиг. 1, соответствующем многократному складыванию. Складная стрела 20 образует в изображенных вариантах надголовную, складываемую сворачиванием стрелу, секция 1 которой в сложенном состоянии прилегает непосредственно к шасси 11, а остальные секции 2-4 свернуты улиткой и в свернутом состоянии выдаются вперед за кабину 15. За счет активирования приводных агрегатов, которые в примерах на фиг. 3, 4, 6 а-с выполнены в виде гидроцилиндров 22-25 двустороннего действия, относящихся каждый в отдельности к соответствующим осям A-D складывания, складная стрела 20 может разворачиваться из своего сложенного транспортного положения в развернутое рабочее положение (фиг. 2 а-d). Разворачивание складной стрелы 20 возможно только тогда, когда шасси 11 с помощью двух передних и двух задних выдвижных опор 26, 28 опирается на основание. В стесненных условиях возможно также одностороннее узкое опирание с помощью выдвижных опор 26, 28, которое при разворачивании складной стрелы 20 требует дополнительных мер безопасности во избежание опасности опрокидывания. Изображенные в различных вариантах складные стрелы 20, выполненные в виде надголовной,складываемой сворачиванием стрелы, имеют то преимущество, что разворачивание стрелового пакета происходит относительно просто и плавно. В противоположность другим видам складывания пакет можно поднимать вокруг оси А и поворачивать из первого квадранта в рабочую зону во втором квадранте. Поскольку к секции 1 прилегает весь остальной стреловой пакет, необходима изображенная на фиг. 2 а-d кинематика разворачивания, чтобы можно было поднять секцию 1. Причина этого, прежде всего, в том, что остальной блок секций выдается за кабину 15. При подъеме необходимо поэтому сначала поднять блок секций на фиг. 2 а-d вокруг оси В складывания на угол 2=10-30, а затем поднять секцию 1 на соответствующий угол 1, чтобы при дальнейшем повороте в этой зоне не произошло столкновения. Во избежание перегрузки секция 1 должна быть поднята вокруг оси А складывания на фиг. 2 с на угол 1=65 и одновременно секция 2 - на угол 90, прежде чем можно будет развернуть другие секции на фиг. 2 с, d. В рабочем состоянии у традиционных конструкций секция 1 при угле 1=65 фиксируется концевым выключателем, тогда как секция 2 в крайнем случае может быть приведена в свое вертикальное положение (фиг. 2d). Вертикальное положение фиксируется выключателем наклона. Секция 3 имеет возможность поворота только на 3=180. Поэтому в случае вертикальности секции 2 секция 3 будет указывать вертикально вверх. Прежде всего, обозначенные на фиг. 2d традиционные пределы в отношении углов 1, 2 поворота воспринимаются при определенных задачах бетонирования как препятствие. С другой стороны, они не используют полностью возможности кинематики, а ограничивают угол поворота в местах, которые являются, хотя и обозримыми, однако не всегда практичными. Чтобы можно было при приведении в действие складной стрелы полностью использовать возможности кинематики, помимо расчета гидронасоса в отношении имеющегося в распоряжении максимального напора необходимо, прежде всего, учитывать прочность в передающих усилия местах гидроцилиндров и устойчивость опертой на основание 30 системы. Для соблюдения предельных критериев в отношении прочности и устойчивости требуется подходящая сенсорика для контроля действующих в зоне гидроцилиндра 22 усилий и воздействующих через развернутую складную стрелу 20 на систему крутящих моментов. Критерий прочности относится, прежде всего, к относящемуся к оси А складывания гидроцилиндру 22, цилиндр 32 которого в зоне оси 34 сочленен с секцией 1, тогда как поршневой шток 36 в зоне оси 38 сочленен с отклоняющим рычагом 50 поворотной головки 21. Это означает, что цилиндр 32 секции 1 при подъеме нагружается напорным маслом со стороны поршневого штока. Из-за небольшой площади поршня там для создания необходимого для подъема усилия FZyl требуется соответственно более высокое давление. С другой стороны, из-за имеющегося предельного давления, например 380 бар, гидросистема может создать только определенное подъемное усилие. К тому же в точке крепления поршневого штока 36 в зоне поршня 37 могут возникнуть проблемы с прочностью. Эти проблемы решаются в процессе разворачивания в описанном выше смысле посредством кинематики разворачивания на фиг. 2 а-d. Чтобы также в рабочем состоянии можно было полностью использовать эти пределы, давление pS и pB на концах гидроцилиндра 22 со стороны поршневого штока и дна контролируется датчиками 42, 44 давления и обрабатывается в обрабатывающей схеме для определения мгновенного усилия цилиндра: где FB и FS - усилия на стороны дна и поршневого штока;pB и pS - давления на стороны дна и поршневого штока;DS - диаметр поршневого штока. Усилие FZyl цилиндра по причинам прочности не должно превышать максимального значения Fmax,которое учитывает, что сварные швы в зоне поршня и усилия складывания в поршне и в цилиндре подвержены максимальной нагрузке. За счет сравнения измеренного и вычисленного по формуле (1) усилияFZyl цилиндра с заданными предельными значениями можно с помощью обрабатывающей схемы 56 контролировать превышение предельного усилия и подавать соответствующий сигнал 57. За счет сигнала 57 можно, например, прервать приведение в действие складной стрелы. Другой предел представляют воздействующие через складную стрелу на систему крутящие моменты М, которые могут сказаться на устойчивости. У надголовной, складываемой сворачиванием стрелы это, прежде всего, режимы работы в затылочном положении секции 1, когда описанный выше угол безопасности 1 меньше 65 (стрелка 70 на фиг. 6 а) и/или когда секция 2 поворачивается из своего вертикального положения в затылочное положение (стрелка 72 на фиг. 6 а). Эта проблема возникает, прежде всего, при односторонней узкой опоре, когда складная стрела 20 приводится вокруг вертикальной оси 13 в боковое относительно продольной оси шасси рабочее положение. Необходимые для определения мгновенного равновесия кинематические элементы внешней частичной системы 1 представлены на фиг. 3 а поворотной головкой 21, секцией/блоком 1 секций и нажимной штангой 52, а внутренней частичной системы 2 - отклоняющим рычагом 50, нажимной штангой 52 и гидроцилиндром 22. В частичной системе 1 внешнее мгновенное равновесие вокруг оси А складывания секции 1 можно вычислить следующим образом: При этом FDS обозначает действующее на нажимную штангу 52 усилие, тогда как GArm обозначает вес блока секций, действующий в центре тяжести 46, а и b обозначают определяющие крутящий момент расстояния от оси А складывания. Из уравнения (3) следует отношение Внутреннее мгновенное равновесие частичной системы 2, состоящей из отклоняющего рычага 50,нажимной штанги 52 и гидроцилиндра 22, возникает на фиг. 3b по отношению к оси 48 вращения отклоняющего рычага 50 следующим образом: При этом FDS обозначает действующее на нажимную штангу 52 усилие, FZyl усилие цилиндра, с и d соответствующие расстояния от оси вращения 48. Из формул (3) и (4) для обеих частичных систем 1 и 2 можно вывести отношение для усилия FZyl цилиндра в зависимости от веса GArm блока секций и величин расстояний a-d С учетом зависимости переменных a-d расстояний от угла 1 складывания секции 1 и дополнительно с учетом максимально допустимого по причинам прочности усилия Fmax цилиндра получают предельную кривую усилия FGrenz(1) цилиндра (в кН) в соответствии с кривой 1 диаграммы на фиг. 5 в зависимости от угла вращения секции (угол 1 складывания). Кривая 2 обозначает предельную кривую допустимого нагрузочного момента MGrenz(1) (в кНм). Допустимый диапазон усилия цилиндра обозначен на диаграмме F, а допустимый диапазон нагрузочного момента - М. При этом следует учесть, что горизонтально лежащей секции 1 соответствует угол вращения секции 1=0, а вертикально стоящей - угол вращения секции 1=90. В нижнем диапазоне нагрузочного момента 0-10 возникает ограниченный по сравнению с максимальным усилием Fmax предельный диапазон FGrenz, который возникает от достижения предела усилия отклоняющего рычага. Плоский участок от 10 до 50 определяется теоретически максимально допустимым усилием Fmax цилиндра. В соответствии с этим на плоском участке возникает также ограниченный по сравнению с Mmax допустимый диапазон нагрузочного момента MGrenz. При углах 1 вращения секции более 50 усилие KGrenz цилиндра ограничено максимально допустимым нагрузочным моментом Mmax. Кривая 1 задается в виде таблицы как поле данных предельного значения усилия FGrenz(1) цилиндра и сравнивается с помощью системной программы (фиг. 7) с результатами измерений FZyl, которые возникают с помощью датчиков 42, 44 давления с учетом формулы (1), а именно в зависимости от соответствующего результата измерений угла 1, определяемого с помощью относящегося к оси А складывания датчика пути или угла. Результат измерений угла может быть определен при этом посредством располо-5 013204 женного на оси А складывания датчика 54 угла. В принципе, для этого можно использовать также соединенный с поршневым штоком 36 и цилиндром 32 гидроцилиндра 22 датчик пути с соответствующим перерасчетом данных пути в данные угла. Третья возможность состоит в использовании геодезического датчика угла, который соединен с секцией 1 и результат измерений которого может быть преобразован в результат измерений угла вокруг оси А складывания. Предохранительное устройство согласно изобретению позволяет, следовательно, вычислить по измеренным с помощью датчиков значениям PS, PB, 1 и производному из этого усилию FZyl цилиндра за счет сравнения с хранящимися в памяти данных в виде таблицы предельными значениями FGrenz(1) по фиг. 5 допустимые конфигурации секции, лучше использующие кинематические возможности системы, чем прежде. Поясненный выше контроль предельных значений проиллюстрирован на фиг. 7 с помощью блоксхемы предохранительной программы. Другое улучшение в этом отношении достигается за счет того,что используются соответствующие таблицы предельных значений также для других секций, в частности для секции 2, и в предохранительное устройство включаются соответствующие датчики в зоне этих секций. В качестве другой переменной может рассматриваться положение вращения складной стрелы 20 вокруг вертикальной оси 13, которое, прежде всего, в предельном диапазоне односторонней узкой опоры приводит к лучшему использованию рабочего диапазона стрелы. На фиг. 6 а-с в качестве простых примеров приведены целенаправленные расширения диапазона поворота секций 1, 2 по стрелкам 70, 72 (фиг. 6 а), которые с учетом поясненного выше контроля предельных значений могут быть достигнуты по сравнению с традиционными, обозначенными штриховыми линиями (фиг. 6b, с) предельными углами. Предусмотренные для измерения значений давлений и углов датчики находят свое применение также при компьютерно-управляемом приведении в действие многосекционных складных стрел 20 с помощью только одного управляющего рычага устройства дистанционного управления (DE 10107107 А 1) и при гашении колебаний складных стрел (DE 10046546 А 1). Установленная в системе сенсорика может универсально использоваться, тем самым, в различных сферах управления системой и ее контроля. Выше изобретение подробно пояснялось с помощью надголовной, складываемой сворачиванием стрелы в качестве первого примера выполнения. Лежащие в основе изобретения идеи могут быть перенесены также на множество других случаев применения. Ниже это поясняется с помощью изображенных на фиг. 8-11 случаев применения. На фиг. 8 изображен фрагмент стандартной бетонораспределительной стрелы, угол 1 вращения которой вокруг оси А складывания стрелы 1 относительно поворотной головки 21 составляет менее 90. Необходимые для определения мгновенного равновесия кинематические элементы изображены на фиг. 8 в соответствии с фиг. 3 а и приведенными на ней ссылочными позициями. Для мгновенного равновесия возникает следующее отношение: Если учесть зависимость переменных а и b расстояния от угла 1 складывания секции 1 и максимально допустимое по причинам прочности усилие Fmax цилиндра, то аналогично подробно поясненному выше примеру для надголовной, складываемой сворачиванием стрелы получают предельную кривую усилия FGrenz(1) цилиндра в зависимости от угла 1 вращения секции (угла складывания). Далее можно указать предельную кривую допустимого нагрузочного момента MGrenz(1). С помощью этих кривых можно реализовать контроль стабильности при движении стрелы в смысле предыдущих рассуждений. В изображенном на фиг. 9 примере выполнения речь идет об автобетононасосе 10 с бетонораспределительной стрелой, секция 1 которой установлена с возможностью поворота на угол 1 вокруг оси 13 складывания поворотной головки 21. Секция 1 состоит из нескольких выдвижных по отношению друг к другу сегментов 1a-1f, и к ее концу примыкает консоль с несколькими другими секциями 2-5. Важное для контроля стабильности мгновенное равновесие вокруг оси А складывания секции 1 приводит и здесь к формуле (7). Если учесть зависимость переменных а и b расстояния от угла 1 складывания секции 1 и от положения остальных секций и дополнительно максимально допустимое по причинам прочности усилие Fmax цилиндра, то также получают предельную кривую аналогично фиг. 5 для усилия FZyl цилиндра в зависимости от угла 1 вращения секции. В изображенном на фиг. 10 примере в виде фрагмента изображена рабочая стрела 14, например, бетононасоса, которая одновременно служит краном для подъема груза. Для этой цели на расстоянии b от оси А складывания секции 1 расположен огибной блок 80, через который пропущен трос 82 с приемным-6 013204 органом 84 для размещения подвижного груза. Кроме того, на тросе 82 расположен датчик 86 усилия для определения веса GLast, выход которого соединен с обрабатывающим блоком предохранительной программы. С помощью этой системы мгновенное равновесие вокруг оси А складывания секции 1 вычисляется следующим образом: Если учесть зависимость переменных a, b и с расстояния от угла 1 секции 1 и от положения остальных секций и дополнительно максимально допустимое по причинам прочности усилие Fmax цилиндра, то также получают предельную кривую усилия FGrenz(1) цилиндра, обеспечивающую контроль стабильности. В изображенном на фиг. 11a, b примере речь идет о мобильном ленточном транспортере 90 с сочлененной с поворотной головкой 21 рабочей стрелой 14 с выдвижными по отношению друг к другу секциями 1a-1d. Стрела 14 установлена с возможностью поворота вокруг оси А складывания на угол 1 с помощью выполненного в виде гидроцилиндра 22 приводного агрегата. Для определения мгновенного равновесия следует учитывать указанные на фиг. 11b размеры и усилия. На этой основе по уравнению (7) вычисляется условие равновесия. Если учесть зависимость переменных а и b расстояния от угла 1 складывания стрелы 14 и от положения секций 1a-1d и дополнительно максимально допустимое по причинам прочности усилие Fmax цилиндра, то также получают предельную кривую усилия FGrenz(1) цилиндра в соответствии с кривой 1 на фиг. 5. Эта кривая задается в виде таблицы как поле данных предельного значения усилия цилиндра и сравнивается с помощью системной программы на фиг. 7 с результатами измерений FZyl. Таким образом, для всех вариантов выполнения можно определить допустимую конфигурацию секций рабочей стрелы 14, соответствующую критерию безопасности по уравнению (6). Подводя итог вышесказанному, можно констатировать следующее. Изобретение относится к рабочей стреле, в частности, для больших манипуляторов и бетононасосов. Рабочая стрела 14 содержит поворотную головку 21, установленную на шасси 11 с возможностью вращения вокруг вертикальной оси 13,первую секцию 1, установленную с возможностью ограниченного поворота вокруг горизонтальной оси А складывания относительно поворотной головки 21 посредством приводного агрегата 22, и по меньшей мере одну дополнительную секцию 2-4, установленную с возможностью продольного перемещения вдоль оси сдвига относительно соседней секции посредством соответствующего приводного агрегата 2325 и/или с возможностью поворота вокруг горизонтальной оси В, С, D складывания. Для движения стрелы с помощью относящихся к отдельным приводным агрегатам исполнительных органов предусмотрено предпочтительно дистанционно управляемое управляющее устройство. В качестве исполнительных органов рассматриваются, прежде всего, сервоклапаны, управляющие выполненными в виде гидроцилиндров приводными агрегатами 22-25. По меньшей мере на одной из секций стрелы, осей сдвига и/или складывания, на вертикальной оси 13 и/или по меньшей мере на одном из приводных агрегатов 22-25 расположен датчик 54 для измерения пути или угла. Управляющее устройство содержит срабатывающую от выходных данных датчиков предохранительную программу. На конце по меньшей мере одного из выполненных в виде гидроцилиндра приводных агрегатов 22-25 со стороны дна и штока расположены, кроме того, датчики 42, 44 давления или усилия, тогда как предохранительная программа содержит обрабатывающий блок 56, срабатывающий от выходных данных датчиков давления или усилия. Чтобы можно было лучше использовать кинематику при движении складной стрелы, предохранительная программа содержит память данных для хранения заданного аналитически или в виде таблицы поля данных из предельных значений давления или усилия в зависимости по меньшей мере от одного из относящихся к секциям результатов измерений пути или угла. Обрабатывающий блок 56 содержит компаратор, к которому подаются выходные данные датчиков 42, 44 давления или усилия и соответствующих датчиков 54 пути или угла и производные от них величины для проведения сравнения с соответствующими данными предельных значений из поля данных и для подачи сигнала в случае данных предельных значений ниже или выше заданных. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Рабочая стрела, содержащая поворотную головку (21), установленную на шасси (11) с возможностью вращения вокруг вертикальной оси (13), по меньшей мере три секции (1-4), установленные с возможностью ограниченного поворота вокруг горизонтальных параллельных друг другу осей (А, В, С, D) складывания относительно поворотной головки (21) или соседней секции посредством приводных агрегатов (22-25), предпочтительно дистанционно управляемое управляющее устройство для движения стрелы с помощью относящихся к отдельным приводным агрегатам (22-25) исполнительных органов, несколько датчиков для измерения путей или углов, относящихся к одной из секций (1-4), осей (А, В, С, D) складывания, вертикальной оси (13) и/или одному из приводных агрегатов (22-25), причем управляющее устройство содержит срабатывающую от выходных данных по меньшей мере одного из датчиков предохранительную программу, и предусмотрен по меньшей мере один датчик (42, 44) давления или усилия, а предохранительная программа содержит срабатывающий от выходных данных датчика давления или усилия обрабатывающий блок (56), отличающаяся тем, что на конце по меньшей мере одного из выполненных в виде гидроцилиндров приводных агрегатов со стороны дна и/или штока расположен один из датчиков (42, 44) давления или усилия; предохранительная программа содержит память данных для хранения заданного аналитически или в виде таблицы поля данных из предельных значений (FGrenz) давления или усилия в зависимости от относящихся к одной из секций стрелы результатов измерений (1) путей или углов, причем обрабатывающий блок (56) содержит компаратор, к которому подаются выходные данные соответствующего датчика (54) пути или угла и соответствующего датчика (42, 44) давления или усилия или производной от них величины (FZyl) для сравнения с соответствующими данными (FGrenz) предельных значений из поля данных и для подачи сигнала (57) в случае данных предельных значений ниже или выше заданных. 2. Рабочая стрела, содержащая поворотную головку (21), установленную на шасси (11) с возможностью вращения вокруг вертикальной оси (13), первую секцию (1), установленную с возможностью ограниченного поворота вокруг горизонтальной оси (А) складывания относительно поворотной головки (21) посредством приводного агрегата (22), по меньшей мере одну дополнительную секцию (2, 3, 4), установленную с возможностью продольного перемещения вдоль оси сдвига относительно соседней секции посредством соответствующего приводного агрегата и/или с возможностью поворота вокруг горизонтальной оси (В, С, D) складывания, предпочтительно дистанционно управляемое управляющее устройство для движения стрелы с помощью относящихся к отдельным приводным агрегатам (22-25) исполнительных органов, несколько датчиков для измерения путей или углов, относящихся каждый к одной из секций (1, 2, 3, 4) стрелы осей (А, В, С, D) складывания, вертикальной оси (13) и/или одному из рабочих агрегатов (22-25), причем управляющее устройство содержит срабатывающую от выходных данных по меньшей мере одного из датчиков предохранительную программу, и предусмотрен по меньшей мере один датчик (42, 44) давления или усилия, а предохранительная программа содержит срабатывающий от выходных данных датчика давления или усилия обрабатывающий блок (56), отличающаяся тем, что на конце по меньшей мере одного из выполненных в виде гидроцилиндров приводных агрегатов со стороны дна и/или штока расположен один из датчиков (42, 44) давления или усилия; предохранительная программа содержит память данных для хранения заданного аналитически или в виде таблицы поля данных из предельных значений (FGrenz) давления или усилия в зависимости от относящихся к одной из секций стрелы результатов измерений (1) пути или угла, причем обрабатывающий блок (56) содержит компаратор, к которому подаются выходные данные соответствующего датчика (54) пути или угла и соответствующего датчика (42, 44) давления или усилия или производной от них величины (FZyl) для сравнения с соответствующими данными (FGrenz) предельных значений из поля данных и для подачи сигнала (57) в случае данных предельных значений ниже или выше заданных. 3. Стрела по п.2, отличающаяся тем, что первая секция (1) установлена с возможностью поворота относительно поворотной головки (21) примерно на 90 с помощью выполненного в виде гидроцилиндра приводного агрегата (22). 4. Стрела по одному из пп.2 или 3, отличающаяся тем, что с концом первой секции (1) с возможностью поворота вокруг горизонтальной оси (В, С, D) складывания шарнирно соединена консоль, состоящая по меньшей мере из одной дополнительной секции (2, 3, 4). 5. Стрела по п.2, отличающаяся тем, что первая секция (1) соединена с несколькими сегментами(1a-1f), установленными с возможностью телескопического продольного перемещения по отношению друг к другу. 6. Стрела по п.5, отличающаяся тем, что с концом последнего продольно перемещаемого сегмента(1f) шарнирно соединена по меньшей мере одна консоль, состоящая из нескольких установленных с возможностью поворота по отношению друг к другу вокруг горизонтальных осей (В-Е) складывания секций(2-5). 7. Стрела по одному из пп.1-6, отличающаяся тем, что по меньшей мере на одной секции на расстоянии от оси (А) складывания первой секции (1) расположен огибной блок (80), через который пропу-8 013204 щен трос (82) с приемным органом (84) для размещения подвижного груза, причем на тросе (82) расположен датчик (86) давления или усилия, выход которого соединен с обрабатывающим блоком (56) предохранительной программы. 8. Стрела по одному из пп.1-7, отличающаяся тем, что на оси (А) складывания соответствующей секции (1) расположен по меньшей мере один датчик (54) угла. 9. Стрела по одному из пп.1-7, отличающаяся тем, что на соответствующем, выполненном в виде гидроцилиндра (22-25) приводном агрегате секции (1-4) расположен по меньшей мере один датчик пути. 10. Стрела по одному из пп.1-9, отличающаяся тем, что на приводном агрегате или в зоне вертикальной оси (13) поворотной головки (21) расположен дополнительный датчик пути или угла, причем хранящееся в памяти данных предохранительной программы аналитически или в виде таблицы поле данных из предельных значений (FGrenz) давления или усилия коррелировано с относящимися к поворотной головке результатами измерений пути или угла. 11. Стрела по одному из пп.1-10, отличающаяся тем, что по меньшей мере один из исполнительных органов выполнен с возможностью срабатывания от сигнала, поданного предохранительной программой при превышении предельных данных, при совершении предохранительного движения или аварийной остановки. 12. Стрела по одному из пп.1-11, отличающаяся тем, что управляющее устройство содержит срабатывающий от результатов измерений пути или угла регулятор положения для движения стрелы. 13. Стрела по одному из пп.1-12, отличающаяся тем, что по меньшей мере на одной из секций расположен геодезический датчик угла для проведения отнесенных к секции измерений пути или угла. 14. Стрела по п.13, отличающаяся тем, что на поворотной головке (21) дополнительно расположен геодезический датчик угла для измерения относящегося к поворотной головке, привязанного к земле значения угла. 15. Стрела по п.13 или 14, отличающаяся тем, что на шасси (11) дополнительно расположен геодезический датчик угла для измерения по меньшей мере одного относящегося к шасси, привязанного к земле значения угла. 16. Стрела по одному из пп.13-15, отличающаяся тем, что геодезические датчики угла выполнены в виде срабатывающих от гравитации Земли датчиков угла наклона. 17. Стрела по одному из пп.13-16, отличающаяся тем, что управляющее устройство содержит системную программу для пересчета привязанных к земле, отнесенных к секции стрелы результатов измерений углов в углы (i) складывания. 18. Стрела по одному из пп.1-17, отличающаяся тем, что управляющее устройство содержит гаситель колебаний для секций распределительной стрелы, срабатывающий от зависящих от времени результатов измерений путей или углов и/или от результатов измерений давлений или усилий.
МПК / Метки
МПК: E04G 21/04, B66C 23/90
Метки: больших, рабочая, манипуляторов, автобетононасосов, стрела, частности
Код ссылки
<a href="https://eas.patents.su/16-13204-rabochaya-strela-v-chastnosti-dlya-bolshih-manipulyatorov-i-avtobetononasosov.html" rel="bookmark" title="База патентов Евразийского Союза">Рабочая стрела, в частности, для больших манипуляторов и автобетононасосов</a>
Устройство для упрощения первичного сооружения, и внутреннего осмотра/ и ремонта больших емкостей, таких как восстановительные паровые котлы и цистерны
Номер патента: 8309
Опубликовано: 27.04.2007
Автор: Бьерклунд Андерс
Метки: сооружения, цистерны, емкостей, больших, паровые, внутреннего, устройство, первичного, котлы, упрощения, ремонта, восстановительные, таких
Формула / Реферат:
1. Устройство для упрощения первоначального сооружения, а также внутреннего осмотра и ремонта больших емкостей (1), таких как восстановительные паровые котлы и резервуары, содержащее платформу (10), которая подвешена с возможностью вертикального регулирования посредством подвесных канатов (13), свисающих с крышки (6) емкости (1), причем платформа (10) выполнена по меньшей мере из двух параллельных разнесенных балок (11), к которым присоединены...
Измерительная и рабочая схема для кориолисового расходомера
Номер патента: 4091
Опубликовано: 25.12.2003
Автор: Матт Кристиан
МПК: G01F 1/84
Метки: рабочая, кориолисового, расходомера, измерительная, схема
Формула / Реферат:
Кориолисовый расходомер, содержащий первичный измерительный преобразователь, выполненный в виде по меньшей мере одной измерительной трубы (1), на которой расположены первый и второй датчик (17, 18) колебаний на расстоянии друг от друга в направлении потока и возбудитель (16) колебаний, первый усилитель (V1) для выходного сигнала первого датчика (17) колебаний, второй усилитель (V2) для выходного сигнала второго датчика (18) колебаний, первый...
Рабочая цепь щебнеочистительной машины
Номер патента: 4730
Опубликовано: 26.08.2004
Авторы: Барканов Игорь Юрьевич, Никончук Михаил Олегович, Логинов Михаил Аркадьевич, Борисоглебский Александр Павлович, Чвоков Владимир Дмитриевич
МПК: E01B 27/11, E02F 3/08, E02F 5/06...
Метки: машины, цепь, щебнеочистительной, рабочая
Формула / Реферат:
Рабочая цепь щебнеочистительной машины с резцами, включающая выгребающие звенья, содержащие основание, проушины, лапы и упоры, соединительные звенья и пальцы, отличающаяся тем, что соединительное звено цепи выполнено в виде плоской серьги овальной формы, выгребающее звено выполнено по длине таким, что передняя часть одного выгребающего звена примыкает к задней части предыдущего звена с минимальным зазором относительной подвижности, а упор...
Композиция для сцепления с основой теплоизоляционного материала, в частности, с основой из полистирола, и её применение в строительстве, в частности в системах наружной теплоизоляции
Номер патента: 8650
Опубликовано: 29.06.2007
Авторы: Реб Ролан, Жубер Даниель, Эдуэн Катрин
Метки: теплоизоляционного, теплоизоляции, сцепления, материала, строительстве, композиция, наружной, применение, полистирола, основой, частности, системах
Формула / Реферат:
1. Композиция для сцепления с основой теплоизоляционного материала, содержащая водонерастворимый плёнкообразующий полимер, сложный моно-, ди- или триэфир фосфата и неорганический вяжущий материал, отличающаяся тем, что водонерастворимый плёнкообразующий полимер получен полимеризацией мономеров, выбранных из сложных виниловых эфиров насыщенных, разветвлённых или неразветвлённых монокарбоновых кислот с 1-16 атомами углерода, таких как винилацетат,...
Железобетонная кровельно-потолочная конструкция с двойным предварительным напряжением с решетчатым плоским потолком для крайне больших пролётов
Номер патента: 6124
Опубликовано: 27.10.2005
Авторы: Скендзик Милован, Смрчек Бранко
МПК: E04B 5/10, E04C 3/293
Метки: потолком, крайне, решетчатым, пролётов, железобетонная, напряжением, плоским, конструкция, предварительным, кровельно-потолочная, двойным, больших
Формула / Реферат:
1. Кровельно-потолочная конструкция с двойным предварительным напряжением с решетчатым плоским потолком для крайне больших пролётов, которая отличается тем, что имеет потолочную решетку (1), верхнюю балку (2) и соединительные трубчатые стержни (3). 2. Конструкция по п.1, которая отличается тем, что решетчатый плоский потолок собирают на строительной площадке из меньших сборочных частей (1.1), изготовленных из стальных труб или предварительно...
Предыдущий патент: Регулируемый узел привода инструмента
Следующий патент: Способ обработки окислившегося остатка сырой нефти
Случайный патент: Способ отделения титана от содержащей титан суспензии