Уборочный агрегат для стебельчатых культур
Формула / Реферат
1. Уборочный агрегат (1) для уборки кукурузы и подобных стебельчатых культур, причем уборочный агрегат содержит, по меньшей мере, один вращающийся бесконечный транспортер (10; 11) для захваченной стебельчатой массы, который на одном конце образует зону (14) подачи массы к входному отверстию устройства дальнейшей переработки, в частности измельчителя, причем бесконечный транспортер содержит шарнирно удерживаемые друг на друге транспортирующие звенья (25; 26) и имеет, по меньшей мере, одну нижнюю плоскость (А) резания, включающую в себя направленные наружу режущие органы, и, по меньшей мере, одну вышележащую, включающую в себя направленные наружу удерживающие органы плоскость (В; С) удержания стеблей массы, отличающийся тем, что обращенная к режущим и удерживающим органам передняя сторона (77; 78) бесконечного транспортера (10; 11) выполнена, по существу, закрытой.
2. Агрегат по п.1, отличающийся тем, что бесконечный транспортер (10; 11) имеет одну нижнюю плоскость (А) резания и две вышележащие плоскости (В; С) удержания, снабженные каждая удерживающими органами для стебельчатой массы.
3. Агрегат по п.1 или 2, отличающийся тем, что удерживающие органы (53; 54) верхней плоскости (С) удержания смещены против направления (F) движения относительно удерживающих органов (51; 52) нижней плоскости (В) удержания в зоне рабочей ветви бесконечного транспортера (10; 11).
4. Агрегат по одному из пп.1-3, отличающийся тем, что транспортирующие звенья (25; 26) бесконечного транспортера (10; 11) выполнены монолитными или образованы прочно соединенными между собой частями.
5. Агрегат по одному из пп.1-4, отличающийся тем, что для образования закрытой передней поверхности соответствующих транспортирующих звеньев (25; 26) между плоскостью (А) резания и первой плоскостью (В) удержания расположен образующий составную часть транспортирующего звена (25; 26) первый отклоняющий щиток (41), а между первой (В) и второй (С) плоскостями удержания - второй отклоняющий щиток (47), при этом отклоняющие щитки (41; 47) проходят между шарнирными осями (60; 61) соответствующих транспортирующих звеньев.
6. Агрегат по п.5, отличающийся тем, что отклоняющие щитки (41; 47) имеют бочкообразную форму, а отклоняющие щитки (41; 47) соседних транспортирующих звеньев (25; 26) образуют в зоне (14) подачи, в которой происходит изменение направления бесконечного транспортера (10; 11), по существу, замкнутую при виде сверху, неломаную траекторию движения.
7. Агрегат по одному из пп.1-6, отличающийся тем, что бесконечный транспортер (10; 11) установлен в раме, причем раме придан режущий нож (34), по отношению к которому бесконечный транспортер (10; 11) является относительно подвижным.
8. Агрегат по п.7, отличающийся тем, что бесконечный транспортер (10; 11) содержит в своей плоскости (А) резания нижний поводок (32; 33), который в качестве ответного лезвия взаимодействует с режущим ножом (34).
9. Агрегат по одному из пп.1-8, отличающийся тем, что закрытой передней поверхности бесконечного транспортера (10; 11) придан, по меньшей мере, один скребок (42; 48), по отношению к которому бесконечный транспортер является относительно подвижным, причем скребок или скребки (42; 48) расположен или расположены в зоне (14) подачи бесконечного транспортера (10; 11).
10. Агрегат по п.9, отличающийся тем, что скребок или скребки (42; 48) выполнены в виде установленных, по существу, на ребро, жестких элементов, расположенных каждый между плоскостями (А; В; С) резания и/или удержания бесконечного транспортера.
11. Агрегат по п.9 или 10, отличающийся тем, что скребок или скребки (42; 48), в основном, полностью ометают промежуток между плоскостью (А) резания и плоскостью (В) удержания и/или между двумя плоскостями (В; С) удержания.
12. Агрегат по одному из пп.9-11, отличающийся тем, что скребок (42; 48) установлен в зоне подачи (14), простирается своим свободным концом, в основном, в направлении (F) движения вперед и входит в криволинейную огибную зону бесконечного транспортера (10; 11).
13. Агрегат по п.12, отличающийся тем, что скребки (42; 48) расположены с обеих сторон входного отверстия для агрегата дальнейшей переработки и образуют боковые направляющие поверхности для скошенной массы.
14. Агрегат по одному из пп.9-13, отличающийся тем, что скребки (42; 48) объединены в одну конструктивную деталь для двух лежащих друг над другом отклоняющих щитков (41; 47).
15. Агрегат по одному из пп.9-14, отличающийся тем, что скребки (42; 48) состоят из пружинной стали.
16. Агрегат по одному из пп.9-15, отличающийся тем, что скребки (42; 48) податливо поддержаны пружинящей опорой.
17. Агрегат по одному из пп.9-16, отличающийся тем, что первая плоскость (В) удержания бесконечного транспортера образована за счет того, что каждое транспортирующее звено (10; 11) содержит в плоскости (В) удержания, по меньшей мере, один поводок (51; 52), являющийся частью лежащего в транспортно-направляющей плоскости пластинчатого тела (45), причем пластинчатое тело (45) имеет, по меньшей мере, один отстоящий наружу поперек направления (U1; U2) вращения бесконечного транспортера (10; 11) выступ, образующий поводок (51; 52).
18. Агрегат по одному из пп.1-17, отличающийся тем, что вторая удерживающая плоскость (С) удержания бесконечного транспортера (10; 11) образована за счет того, что каждое транспортирующее звено (25; 26) содержит в плоскости (С) удержания, по меньшей мере, один поводок (53; 54), являющийся частью лежащего в транспортно-направляющей плоскости пластинчатого тела (46), причем пластинчатое тело (46) имеет, по меньшей мере, один отстоящий наружу поперек направления (U1; U2) вращения бесконечного транспортера (10; 11) выступ, образующий поводок (53; 54).
19. Агрегат по п.17 или 18, отличающийся тем, что пластинчатое тело (45; 46) имеет два отстоящих вперед выступа (51, 52; 53, 54).
20. Агрегат по п.19, отличающийся тем, что между выступами (51, 52; 53, 54) каждого пластинчатого тела (45; 46) и выступами (51, 52; 53, 54) лежащего в той же плоскости (В; С) соседнего пластинчатого тела (45; 46) образованы приблизительно одинаковые по величине промежутки.
21. Агрегат по одному из пп.17-20, отличающийся тем, что пластинчатые тела (45; 46) плоскостей (В; С) удержания имеют по два выступа (51, 52) и (53, 54).
22. Агрегат по одному из пп.17-21, отличающийся тем, что выступы (51; 52), по меньшей мере, одной плоскости (45) удержания выполнены в виде ориентированных в форме параллелограмма плоских тел.
23. Агрегат по одному из пп.17-22, отличающийся тем, что выступы (53; 54) выполнены расширяющимися против направления (F) движения и, тем самым, промежуток (55) между выступами (53; 54) уменьшается в зоне рабочей ветви (18) против направления (F) движения.
24. Агрегат по одному из пп.17-23, отличающийся тем, что в нижней плоскости (В) удержания выполнены, в основном, в виде параллелограмма (51; 52), а в верхней плоскости (С) удержания - в виде треугольника (53; 54) выступы пластинчатых тел (45; 46) и скошенные стебли (3) удерживаются, с одной стороны, в остром углу (W) между параллелограммообразным выступом (51; 52) и передней кромкой (45а) пластинчатого тела (45) и, с другой стороны, в углу между треугольным выступом (53; 54) и передней кромкой (46а) пластинчатого тела (46) верхней плоскости (С) удержания.
25. Агрегат по п.24, отличающийся тем, что приемное пространство (55) для скошенных стеблей (3), образованное действующими в качестве удерживающих элементов выступами (51, 52; 53, 54) названных плоскостей (В; С) удержания, сужается против направления (F) движения.
26. Агрегат по одному из пп.17-25, отличающийся тем, что передняя кромка (45а; 46а) пластинчатых тел (45; 46) между выступами (51, 52; 53, 54) выполнена, по существу, в форме дуги окружности.
27. Агрегат по одному из пп.17-26, отличающийся тем, что каждое пластинчатое тело (45; 46) имеет параллельно направлению (U1; U2) вращения на одном конце расширение (64; 65), по существу, в форме дуги окружности, а на другом конце - соответствующую выемку (68; 69), причем пластинчатые тела (45; 46) соседних транспортирующих звеньев (25; 26) в собранном состоянии входят друг в друга с небольшим зазором.
28. Агрегат по одному из пп.1-27, отличающийся тем, что пластинчатое тело (44), несущее выполненный в виде ответного лезвия поводок (31), имеет параллельно направлению (U1; U2) вращения также на одном конце сегмент (66; 67) в форме дуги окружности, а на другом конце - соответствующую выемку (70), и соседние пластинчатые тела (44) входят друг в друга с небольшим зазором.
29. Агрегат по одному из пп.1-28, отличающийся тем, что кривизна отклоняющих щитков (41; 47), как и кривизна передней кромки (44а; 45а; 46а) пластинчатых тел (44; 45; 46) выполнена в форме дуги (64) окружности.
30. Агрегат по п.26, отличающийся тем, что радиус кривизны, в основном, соответствует радиусу огибного или приводного колеса, расположенного вблизи зоны (14) подачи бесконечного транспортера (10; 11) к перерабатывающему устройству.
31. Агрегат по одному из пп.1-28, отличающийся тем, что каждое транспортирующее звено (25; 26) бесконечного транспортера (10; 11) выполнено с возможностью составления из двух участков (37; 38) и фиксации.
32. Агрегат по одному из пп.1-31, отличающийся тем, что соседние транспортирующие звенья (25; 26) имеют выполненное с возможностью поворотного движения соединение (73).
33. Агрегат по п.32, отличающийся тем, что поворотное соединение (73) между соседними транспортирующими звеньями (25; 26) создается посредством приданного верхнему участку (38) опорного пальца (49) и принимающего опорный палец опорного рыма (43) нижнего участка (37) соседнего транспортирующего звена (25; 26).
34. Агрегат по п.33, отличающийся тем, что в качестве опор (72) поворотных соединений (73) предусмотрены герметичные подшипники качения или радиальные шарикоподшипники, при этом имеющие форму дуги окружности сегменты (64; 66; 67) пластинчатых тел (44; 45; 46) образуют крышку опор (72).
35. Агрегат по одному из пп.31-34, отличающийся тем, что участки (37; 38) транспортирующего звена (25; 26) свинчены между собой.
36. Агрегат по одному из пп.31-35, отличающийся тем, что верхний участок (38) включает в себя пластинчатые тела (45; 46) с образующими плоскости удержания выступами (51; 52; 53; 54) и промежуточным отклоняющим щитком (47), а нижний участок (37) включает в себя выполненные в виде поводков ответные лезвия (31) и дополнительный отклоняющий щиток (41).
37. Агрегат по одному из пп.1-36, отличающийся тем, что бесконечный транспортер (10; 11) имеет на транспортирующих звеньях (25; 26) уступы для взаимодействия с приводом, которые образованы гильзообразными элементами (43), образующими опорный рым.
38. Агрегат по п.37, отличающийся тем, что для привода бесконечного транспортера (10; 11) предусмотрены, по меньшей мере, два противоположных друг другу огибных колеса, воздействующих на уступы (43) и вызывающих вращение транспортирующих звеньев (25; 26), при этом приводное колесо бесконечного транспортера (10; 11) придано зоне подачи (14) к устройству дальнейшей переработки и в этой зоне подачи (14) происходит изменение направления бесконечного транспортера (10; 11).
39. Агрегат по одному из пп.1-38, отличающийся тем, что зона приводного колеса бесконечного транспортера (10; 11) способна разместить дополнительные транспортеры, приводимые во вращение вокруг оси (12.1; 13.1) вращения.
40. Агрегат по одному из пп.1-39, отличающийся тем, что транспортирующие звенья (25; 26) бесконечного транспортера (10; 11) при своем движении проходят между приводными и огибными колесами.
41. Агрегат по одному из пп.1-40, отличающийся тем, что транспортирующие звенья (25; 26) снабжены с задней стороны органом (29; 129) зацепления, ориентированным параллельно направлению (U1; U2) вращения и входящим в соответствующую выемку (30; 130) направляющей планки (28; 128).
42. Агрегат по п.41, отличающийся тем, что орган (129) зацепления образован направленной вверх осью, содержащей подшипник скольжения или качения для своего перемещения в выемке (130).
43. Агрегат по одному из пп.1-42, отличающийся тем, что предусмотрены два направленных вбок наружу и, по существу, при работе лежащих соосно рядом друг с другом бесконечных транспортера (10; 11).
44. Агрегат по одному из пп.1-43, отличающийся тем, что каждой раме, несущей бесконечный транспортер, приданы листо- и растениеподъемники (15), каждый из которых содержит пирамидообразное делительное острие (16), при этом каждому делительному острию (16) придана направляющая скоба (17), содержащая указывающую, в основном, в направлении (U1; U2) транспортировки консоль, проходящую до следующего листо- и растениеподъемника (15).
45. Агрегат по п.44, отличающийся тем, что направляющая скоба (17) установлена подпружиненно и за счет усилия пружины натянута для образования между нею и рабочей ветвью (18) бесконечного транспортера (10; 11) транспортирующего канала для транспортировки стебельчатой массы (3) против направления (F) движения.
46. Агрегат по одному из пп.1-45, отличающийся тем, что под бесконечными транспортерами расположены подвижные, отделенные от бесконечных транспортеров режущие ножи (112; 113).
47. Агрегат по п.46, отличающийся тем, что подвижные режущие ножи (112; 113) выполнены в виде вращающихся дисков и расположены в плоскости, находящейся непосредственно под плоскостью движения бесконечных транспортеров и параллельно траектории их движения.
48. Агрегат по п.47, отличающийся тем, что бесконечные транспортеры своей рабочей ветвью ометают проходящую поперек направления (F) движения зону транспортировки, а вращающиеся режущие ножи (112; 113) расположены под этой зоной транспортировки ступенчато рядом друг с другом.
49. Агрегат по одному из пп.46-48, отличающийся тем, что транспортирующие звенья содержат режущие органы, которые взаимодействуют в нижней плоскости с вращающимися режущими ножами (112; 113).
50. Агрегат по одному из пп.46-49, отличающийся тем, что вращающиеся режущие ножи (112; 113) установлены неподвижно относительно удерживающих бесконечные транспортеры (10; 11) рам (110; 111) и срезают массу (3) в свободном резании.
51. Агрегат по п.50, отличающийся тем, что вращающиеся режущие ножи (112; 113) проходят в двух плоскостях и установлены перекрывая друг друга со смещением по высоте.
52. Агрегат по одному из пп.1-51, отличающийся тем, что в зоне подачи (14) предусмотрено неподвижное ответное лезвие (132), под которым при работе на близком расстоянии проходит поводок (31) плоскости (А) резания и над которым проходит дополнительный поводок (131), лежащий параллельно над поводком (31).
53. Агрегат по п.52, отличающийся тем, что верхний поводок (131) фиксирован на транспортирующих звеньях (25; 26) транспортеров (10; 11) посредством проходящих через отклоняющий щиток (41) и закрепленных на задней стороне выступов (133).

Текст
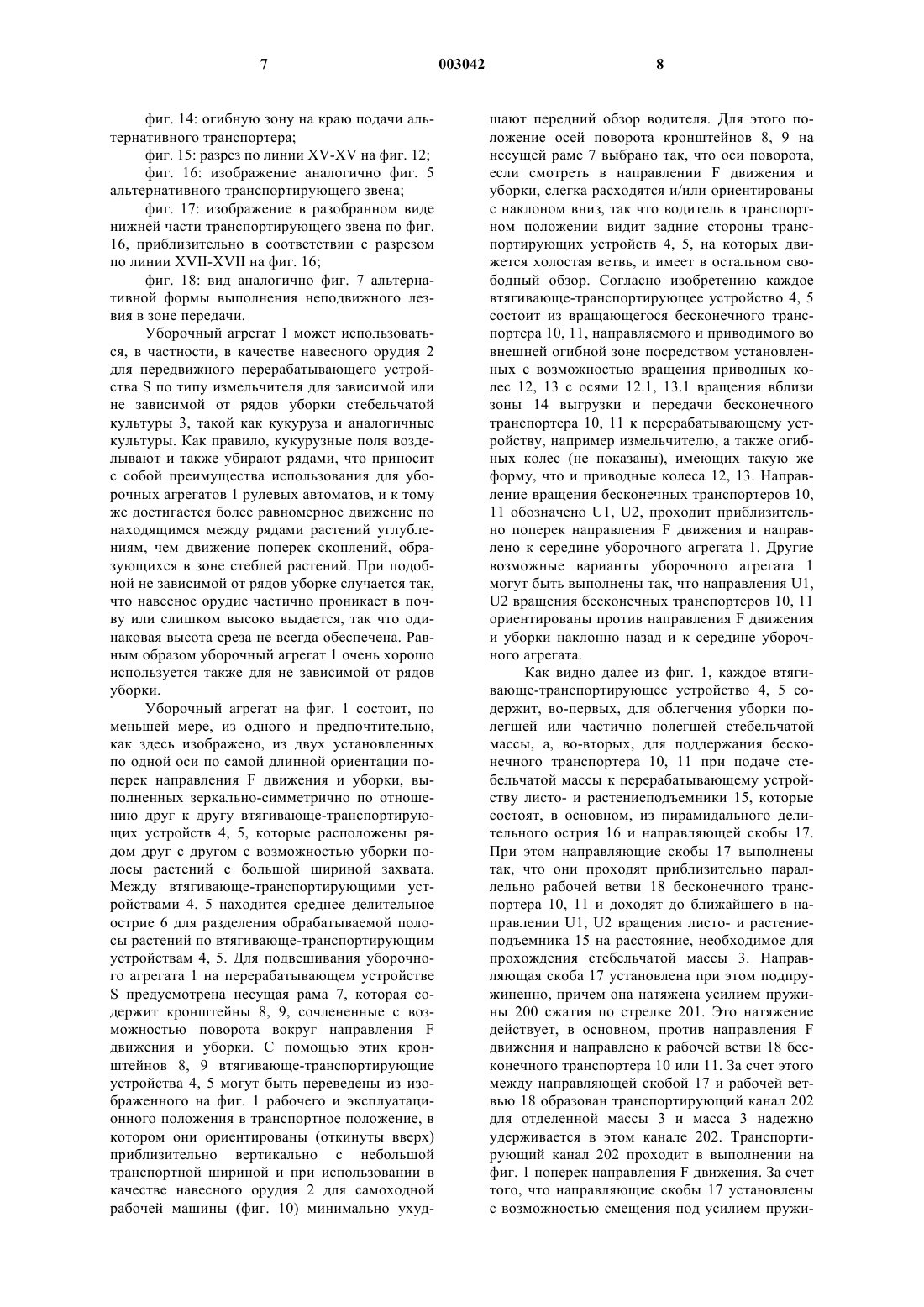
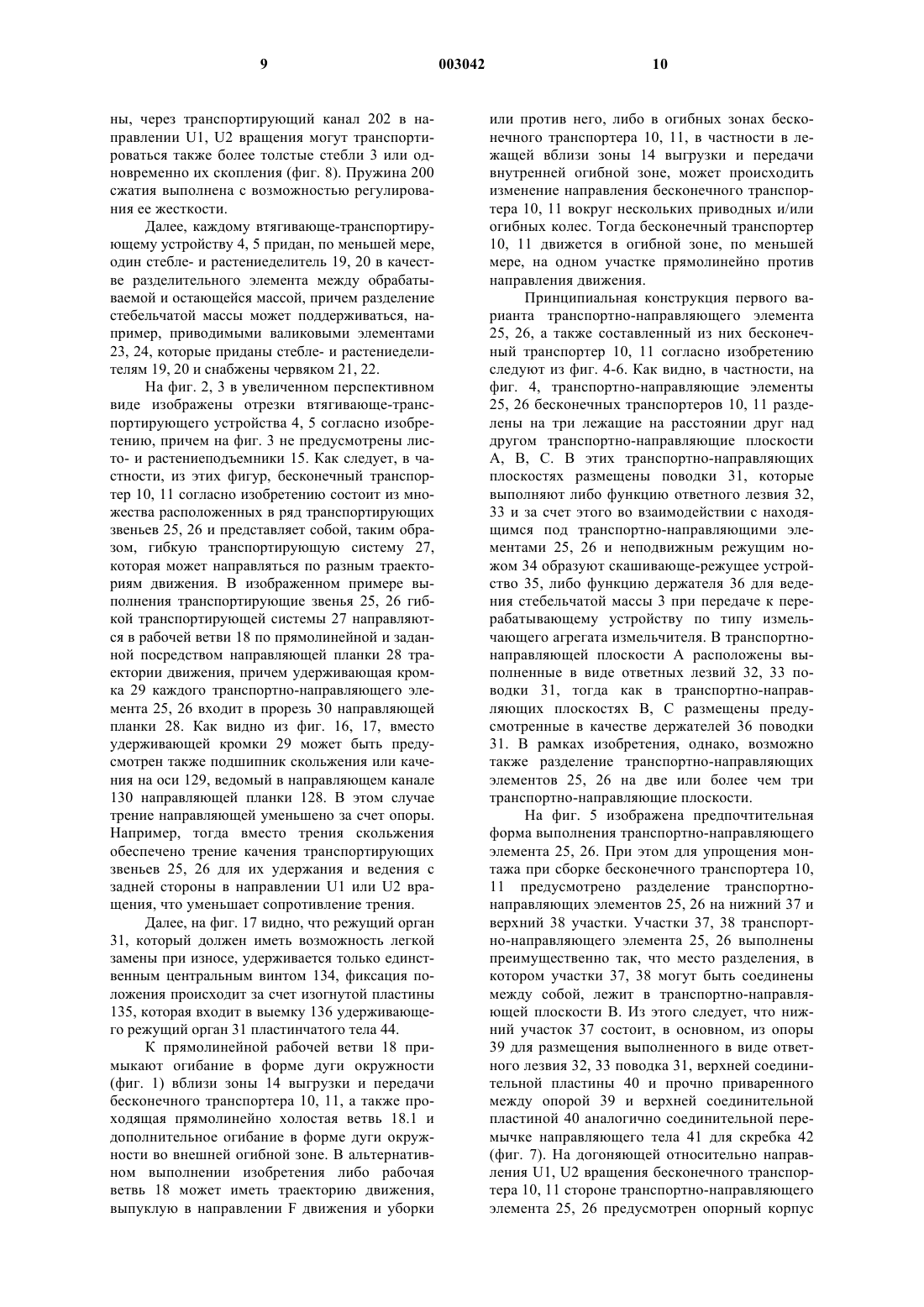
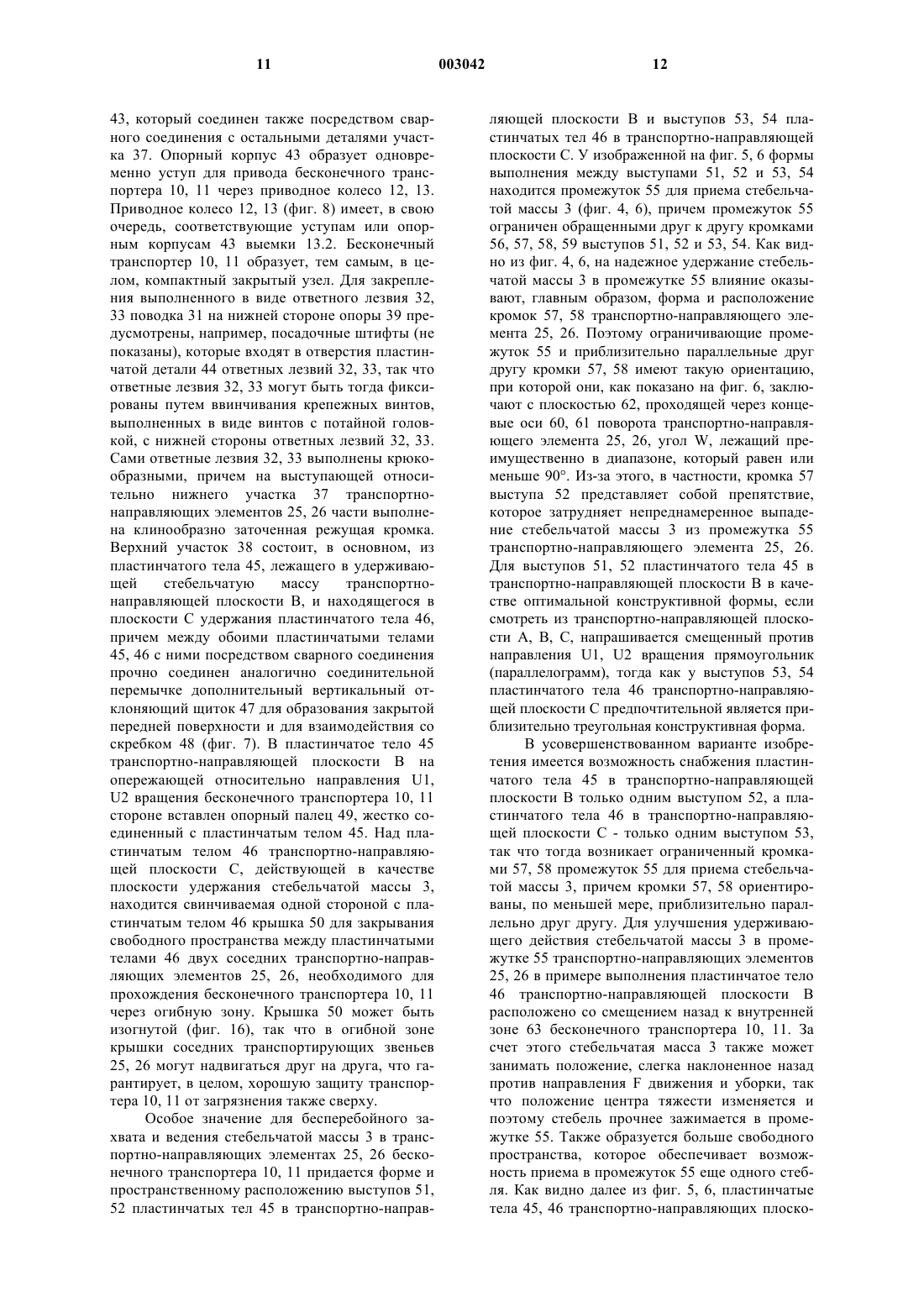
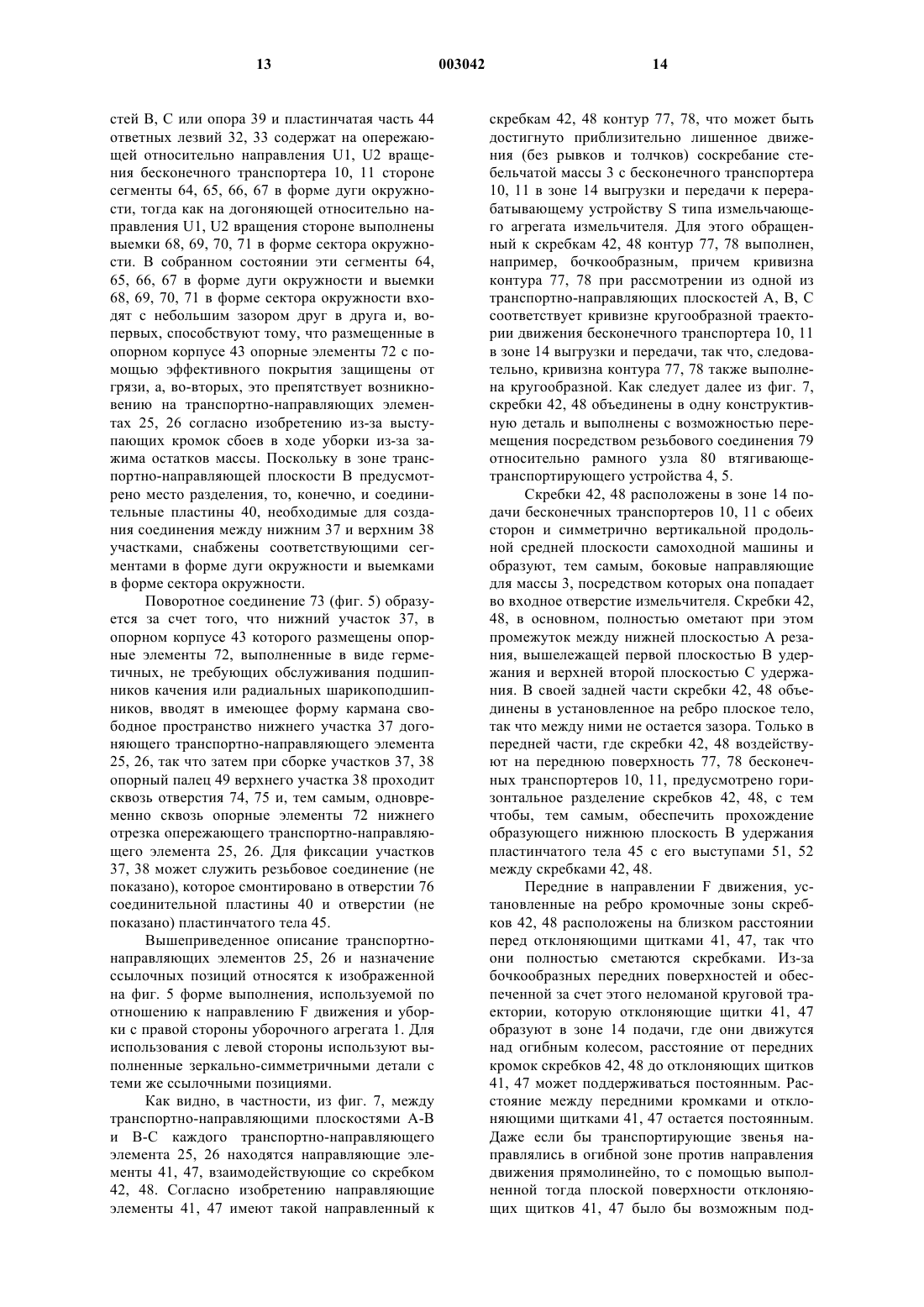
1 Изобретение относится к уборочному агрегату для уборки кукурузы и подобных стебельчатых культур согласно ограничительной части п.1 формулы. Подобный уборочный агрегат, предусмотренный, в частности, в качестве навесного орудия для передвижного перерабатывающего устройства, например измельчителя,служит для захвата, срезки и передачи, например, растений кукурузы к устройству для дальнейшей переработки. Из более ранней заявки того же заявителяDE 3324899 С 2 известна машина для уборки стебельчатых культур, у которой растения захватывают транспортно-режущим устройством,срезают их и подают к измельчителю. Транспортно-режущее устройство содержит вращающуюся поперек направления движения цепную систему. Цепная система состоит при этом из двух обычных, лежащих друг над другом, бесконечных и проходящих по огибным колесам длиннозвенных роликовых цепей, которым приданы удерживающие пальцы с ответными опорами и взаимодействующие с неподвижным режущим ножом ответные лезвия для срезки и ведения стебельчатых растений кукурузы. Цепи содержат с верхней и нижней сторон пластины,между которыми находятся открытые, ограниченные вертикальными болтами пространства. Размещенный под цепной системой неподвижный режущий нож и соответствующий ножедержатель образуют плоскую поверхность скольжения для ведения цепной системы. Для достижения надежного ведения стебельчатого растения кукурузы после срезки при этом предусмотрено такое размещение удерживающих пальцев и ответных опор, что растение кукурузы за счет одновременного прилегания к удерживающему пальцу и ответной опоре может подаваться к измельчителю в слегка наклоненном относительно вертикали положении. Только в расположенной вблизи измельчителя огибной зоне цепной системы освобождение стебельчатого растения кукурузы происходит за счет того, что благодаря обороту верхней и нижней длиннозвенных роликовых цепей вокруг установленных на различных осях огибных колес возникает устранение удерживающего действия, созданного удерживающими пальцами и ответными опорами. Основной недостаток описанного выше транспортно-режущего устройства следует усматривать в том, что в господствующих при работе условиях эксплуатации (соприкосновение с землей, водой и растительными остатками) невозможно добиться достаточной стойкости, в частности, длиннозвенных роликовых цепей к износу. Цепи засоряются и теряют свою транспортную способность. Замена отдельных цепных звеньев к тому же довольно сложна из-за составной конструкции. В основе изобретения лежит проблема создания уборочного агрегата для уборки кукурузы и подобных стебельчатых культур, с помощью 2 которого растения можно было бы бесперебойно срезать с большой шириной захвата и подавать их к примыкающему к нему перерабатывающему устройству. Уборочный агрегат должен при этом иметь удовлетворительный срок службы даже в жестких условиях эксплуатации в сельском хозяйстве. Изобретение решает проблему посредством уборочного агрегата с признаками п.1 формулы изобретения. В отношении дальнейшего выполнения изобретения следует сослаться на пп.2-63. У уборочного агрегата согласно изобретению попадание частей растений или почвы в звенья бесконечного транспортера почти полностью предотвращено. За счет закрытых передних поверхностей бесконечный транспортер выполнен в виде капсюлированного узла, у которого внутренний привод для бесконечного транспортера или транспортеров может действовать без негативного влияния растительных или почвенных остатков. Если друг над другом предусмотрены две плоскости удержания, то особенно предпочтительно отделенные стебли могут транспортироваться почти в вертикальном положении поперек их длины, причем закрыто также пространство между плоскостями удержания, так что в цепь не могут попасть также листья, которые приблизительно в нижней части простираются наружу от стеблей. Если верхняя в рабочем положении плоскость удержания смещена относительно нижней против направления движения,то этим предотвращено опрокидывание скошенных стеблей вперед перед рабочей ветвью бесконечного транспортера, что помешало бы ходу уборки. Напротив, стебли таким образом транспортируются в слегка наклоненном назад положении. Если бесконечный транспортер выполнен в виде унифицированного функционального органа, который, в целом, выполнен монолитным или содержит прочно соединенные между собой части, возникает простая конструктивная форма соответствующих транспортирующих звеньев. Последние могут быть без проблем заменены. При нескольких составных частях для образования транспортирующего звена они могут быть защищены от вращения друг на друге, например, предохранителями с геометрическим замыканием и фиксированы друг на друге только одним центральным винтом, что облегчает монтаж в процессе изготовления, техобслуживание и замену. Этим устранено наличие большого числа деталей, присущее открытым пластинчатым цепям. В транспортирующие звенья предпочтительно встроены также отклоняющие щитки для образования закрытой передней поверхности,которые образуют постоянную составную часть соответствующего транспортирующего звена. 3 Особенно предпочтительно отклоняющие щитки выполнены с возможностью образования в зоне подачи к измельчителю или подобному устройству при виде сверху неломаной замкнутой траектории. Если зона подачи образована,например, большим, размещенным с задней стороны бесконечного транспортера огибным колесом, то траектория может быть, в целом,криволинейной, повторяя радиус этого колеса. Для этого отдельные отклоняющие щитки имеют бочкообразную, выпуклую вперед форму,так что они в зоне подачи образуют, в целом,круговую линию. Если в зоне подачи, например,посредством двух огибных колес установлено образованное между ними параллельное положение транспортирующих звеньев, в качестве альтернативы может быть реализована также плоская форма отклоняющих щитков. Благодаря замкнутой неломаной траектории можно предусмотреть в зоне подачи для бесконечных транспортеров скребки, которые могут быть тогда неподвижными и иметь соответственно постоянное расстояние до отклоняющих щитков транспортирующих звеньев. Особенно предпочтительно эти скребки расположены с обеих сторон входного отверстия агрегата дальнейшей переработки и образуют боковые направляющие поверхности для скошенной растительной массы. Подача скошенной растительной массы в измельчитель происходит практически без потерь. Если в плоскостях удержания выполнены соответственно пластинчатые тела, которые в плоскости пластинчатого тела имеют выступы в качестве поводков, то поводки могут быть выполнены за одно целое с пластинчатыми телами,что обеспечивает особенно высокую стабильность и реализуется конструктивно со значительно меньшими затратами, чем, например,приваривание поводков к участкам транспортирующих звеньев. Цепные звенья могут быть выполнены, в целом, в виде монолитных отливок. Особое значение для бесперебойного захвата и ведения стебельчатых растений транспортно-направляющими элементами бесконечного транспортера имеют согласно изобретению форма находящихся между выступами промежутков, служащих захватными пространствами для отделенных стеблей, а также пространственное расположение пластинчатых тел средней и верхней транспортно-направляющих плоскостей по отношению друг к другу. В предпочтительной форме выполнения ограничивающие промежутки кромки выступа, размещенного в средней транспортно-направляющей плоскости и являющегося опережающим относительно направления вращения бесконечного транспортера, а также выступа, размещенного в нижней транспортно-направляющей плоскости и являющегося догоняющим относительно направления вращения бесконечного транспортера, 003042 4 имеют параллельное расположение по отношению друг к другу. Прилегающий, например, к этим кромкам стебель кукурузы занимает при этом положение, наклоненное против направления вращения бесконечного транспортера. Далее предусмотрено, что кромки, ограничивающие промежуток для захвата стебельчатой массы, расположены на соответствующем пластинчатом теле под острым углом к плоскости, которая проходит через концевые оси поворота каждого транспортно-направляющего элемента и, тем самым, ориентирована параллельно направлению вращения бесконечного транспортера. За счет этого создается удерживающее действие стебельчатой массы в находящихся между выступами промежутках, благодаря которому достигается надежная и, тем самым, бесперебойная передача срезанной стебельчатой массы к последующему перерабатывающему устройству типа измельчителя. Предпочтительная конструктивная форма находящегося в средней транспортно-направляющей плоскости выступа возникает тогда, когда этот выступ при рассмотрении из одной из транспортнонаправляющих плоскостей принимает форму смещенного против направления вращения бесконечного транспортера прямоугольника (параллелограмма), возможно, со скругленными углами, тогда как в верхней транспортнонаправляющей плоскости предпочтителен выступ треугольной формы. В рамках изобретения возможны, однако, и другие формы выполнения промежутков между выступами пластинчатых тел в средней и верхней транспортно-направляющих плоскостях для захвата стебельчатой массы. Так, например,можно снабдить пластинчатые тела двумя выступами, причем ограничивающие промежутки кромки ориентированы приблизительно параллельно друг другу и/или расстояния между ограничивающими промежутки кромками увеличиваются, если смотреть в направлении движения и уборки. Согласно другому предпочтительному аспекту изобретения, поводкам или их держателям в нижней транспортно-направляющей плоскости и пластинчатым телам в средней и верхней транспортно-направляющих плоскостях на опережающей относительно направления вращения бесконечного транспортера стороне соответствуют сегменты в форме дуги окружности, а на догоняющей стороне - выемки в форме кругового сектора, которые при расположении транспортирующих звеньев в ряд входят друг в друга с небольшим зазором. Из этого возникают, во-первых, простые и эффективные крышки для защиты опорных элементов, находящихся в зоне соединения двух транспортирующих звеньев, а, во-вторых, эта конструкция исключает возникновение выступающих кромок на расположенных в ряд транспортно-направляющих 5 элементах, которые могут привести к сбоям в ходе уборочного процесса. Другой предпочтительный аспект состоит в характере соединения между расположенными в ряд транспортно-направляющими звеньями бесконечного транспортера. При этом предусмотрено создание поворотного соединения между двумя соседними транспортно-направляющими элементами, у которого в местах соединений не возникает трения скольжения, приводящего в сочетании с грязью к большому износу. Для достижения этого транспортно-направляющее звено на догоняющей относительно направления вращения бесконечного транспортера стороне содержит опорный корпус, в котором размещены выполненные в виде герметичных подшипников качения опорные элементы. Для сокращения монтажных затрат при сборке выполненного таким образом бесконечного транспортера далее предусмотрено выполнение транспортирующих звеньев с возможностью их составления из нижнего и верхнего отрезков и фиксации. Благодаря этому обеспечивается то, что при соединении отрезков соответствующий верхнему отрезку опорный палец одного транспортирующего звена входит в содержащий опорные элементы опорный корпус транспортирующего звена,являющегося опережающим относительно направления вращения бесконечного транспортера. Оба отрезка могут быть соединены тогда между собой, например, посредством резьбового соединения. В качестве опорных элементов применимы при этом герметичные подшипники качения,причем используются преимущественно герметичные радиальные шарикоподшипники. Опорные корпусы образуют одновременно уступы для привода посредством приводного колеса, которое имеет соответствующие уступам выемки. Как следует из вышеприведенных рассуждений, бесконечный транспортер согласно изобретению содержит транспортирующую систему, которая образована множеством расположенных в ряд с возможностью поворота транспортирующих звеньев и проходит, по меньшей мере, по одному приводному и огибному колесам с возможностью приведения в движение. В усовершенствовании изобретения можно также использовать в соответствующих огибных зонах бесконечного транспортера и в частности в зоне выгрузки и передачи бесконечного транспортера к перерабатывающему устройству одно приводное колесо и несколько огибных колес. Далее, вполне можно придать приводному колесу бесконечного транспортера в зоне вблизи зоны передачи бесконечного транспортера дополнительные транспортеры или также неподвижно выполненные направляющие органы для улучшения подачи стебельчатой массы к перерабатывающему устройству, которые могут снабжаться приводной энергией также от привода приводного колеса. 6 Особенно благоприятно, если под бесконечным транспортером расположены подвижные режущие ножи, например вращающиеся режущие ножи, которые действуют либо в свободном резании, либо во взаимодействии с поводками плоскости резания. Предпочтительно далее предусмотреть в зоне подачи ответное лезвие, под и над которым проходят поводки плоскости резания и дополнительные поводки, расположенные над ними на близком расстоянии, так что застрявшие на поводках растительные остатки, в частности остатки листьев, измельчаются неподвижным ответным лезвием и не могут намотаться на поводки. Другие преимущества и подробности следуют из описанных ниже и изображенных на чертежах примерах выполнения объекта изобретения. На чертежах представляют: фиг. 1: перспективное изображение уборочного агрегата согласно изобретению с двумя втягивающе-транспортирующими устройствами, выполненными зеркально-симметрично по отношению друг к другу; фиг. 2: увеличенное, частично прерванное изображение выносного элемента Х на фиг. 1; фиг. 3: изображение аналогично фиг. 2,однако, без листо- и растениеподъемника; фиг. 4: прерванное перспективное изображение бесконечного транспортера согласно изобретению со схематично изображенным стеблем растения при рассмотрении против направления движения; фиг. 5: перспективный вид транспортнонаправляющего элемента в разобранном по участкам изображении; фиг. 6: вид сверху на изображенный на фиг. 5 транспортно-направляющий элемент во время транспортировки стебля растения; фиг. 7: прерванное перспективное изображение уборочного агрегата согласно изобретению при рассмотрении из направления по стрелке В на фиг. 1; фиг. 8: увеличенное, частично прерванное перспективное изображение привода бесконечного транспортера в виде выносного элемента Y из фиг. 1; фиг. 9: подробное изображение растениеподъемника с подпружиненно расположенной на нем направляющей скобой; фиг. 10: изображение аналогично фиг. 1 с самоходной машиной в качестве носителя уборочного агрегата и устройства дальнейшей переработки; фиг. 11: альтернативное выполнение транспортирующего звена с направляющей отформовкой в нижней плоскости; фиг. 12: частично с вырывом вид сверху альтернативного транспортера с транспортирующими звеньями по фиг. 11; фиг. 13: перспективное прерванное изображение участка рабочей ветви альтернативного транспортера; 7 фиг. 14: огибную зону на краю подачи альтернативного транспортера; фиг. 15: разрез по линии XV-XV на фиг. 12; фиг. 16: изображение аналогично фиг. 5 альтернативного транспортирующего звена; фиг. 17: изображение в разобранном виде нижней части транспортирующего звена по фиг. 16, приблизительно в соответствии с разрезом по линии XVII-XVII на фиг. 16; фиг. 18: вид аналогично фиг. 7 альтернативной формы выполнения неподвижного лезвия в зоне передачи. Уборочный агрегат 1 может использоваться, в частности, в качестве навесного орудия 2 для передвижного перерабатывающего устройства S по типу измельчителя для зависимой или не зависимой от рядов уборки стебельчатой культуры 3, такой как кукуруза и аналогичные культуры. Как правило, кукурузные поля возделывают и также убирают рядами, что приносит с собой преимущества использования для уборочных агрегатов 1 рулевых автоматов, и к тому же достигается более равномерное движение по находящимся между рядами растений углублениям, чем движение поперек скоплений, образующихся в зоне стеблей растений. При подобной не зависимой от рядов уборке случается так,что навесное орудие частично проникает в почву или слишком высоко выдается, так что одинаковая высота среза не всегда обеспечена. Равным образом уборочный агрегат 1 очень хорошо используется также для не зависимой от рядов уборки. Уборочный агрегат на фиг. 1 состоит, по меньшей мере, из одного и предпочтительно,как здесь изображено, из двух установленных по одной оси по самой длинной ориентации поперек направления F движения и уборки, выполненных зеркально-симметрично по отношению друг к другу втягивающе-транспортирующих устройств 4, 5, которые расположены рядом друг с другом с возможностью уборки полосы растений с большой шириной захвата. Между втягивающе-транспортирующими устройствами 4, 5 находится среднее делительное острие 6 для разделения обрабатываемой полосы растений по втягивающе-транспортирующим устройствам 4, 5. Для подвешивания уборочного агрегата 1 на перерабатывающем устройствеS предусмотрена несущая рама 7, которая содержит кронштейны 8, 9, сочлененные с возможностью поворота вокруг направления F движения и уборки. С помощью этих кронштейнов 8, 9 втягивающе-транспортирующие устройства 4, 5 могут быть переведены из изображенного на фиг. 1 рабочего и эксплуатационного положения в транспортное положение, в котором они ориентированы (откинуты вверх) приблизительно вертикально с небольшой транспортной шириной и при использовании в качестве навесного орудия 2 для самоходной рабочей машины (фиг. 10) минимально ухуд 003042 8 шают передний обзор водителя. Для этого положение осей поворота кронштейнов 8, 9 на несущей раме 7 выбрано так, что оси поворота,если смотреть в направлении F движения и уборки, слегка расходятся и/или ориентированы с наклоном вниз, так что водитель в транспортном положении видит задние стороны транспортирующих устройств 4, 5, на которых движется холостая ветвь, и имеет в остальном свободный обзор. Согласно изобретению каждое втягивающе-транспортирующее устройство 4, 5 состоит из вращающегося бесконечного транспортера 10, 11, направляемого и приводимого во внешней огибной зоне посредством установленных с возможностью вращения приводных колес 12, 13 с осями 12.1, 13.1 вращения вблизи зоны 14 выгрузки и передачи бесконечного транспортера 10, 11 к перерабатывающему устройству, например измельчителю, а также огибных колес (не показаны), имеющих такую же форму, что и приводные колеса 12, 13. Направление вращения бесконечных транспортеров 10,11 обозначено U1, U2, проходит приблизительно поперек направления F движения и направлено к середине уборочного агрегата 1. Другие возможные варианты уборочного агрегата 1 могут быть выполнены так, что направления U1,U2 вращения бесконечных транспортеров 10, 11 ориентированы против направления F движения и уборки наклонно назад и к середине уборочного агрегата. Как видно далее из фиг. 1, каждое втягивающе-транспортирующее устройство 4, 5 содержит, во-первых, для облегчения уборки полегшей или частично полегшей стебельчатой массы, а, во-вторых, для поддержания бесконечного транспортера 10, 11 при подаче стебельчатой массы к перерабатывающему устройству листо- и растениеподъемники 15, которые состоят, в основном, из пирамидального делительного острия 16 и направляющей скобы 17. При этом направляющие скобы 17 выполнены так, что они проходят приблизительно параллельно рабочей ветви 18 бесконечного транспортера 10, 11 и доходят до ближайшего в направлении U1, U2 вращения листо- и растениеподъемника 15 на расстояние, необходимое для прохождения стебельчатой массы 3. Направляющая скоба 17 установлена при этом подпружиненно, причем она натяжена усилием пружины 200 сжатия по стрелке 201. Это натяжение действует, в основном, против направления F движения и направлено к рабочей ветви 18 бесконечного транспортера 10 или 11. За счет этого между направляющей скобой 17 и рабочей ветвью 18 образован транспортирующий канал 202 для отделенной массы 3 и масса 3 надежно удерживается в этом канале 202. Транспортирующий канал 202 проходит в выполнении на фиг. 1 поперек направления F движения. За счет того, что направляющие скобы 17 установлены с возможностью смещения под усилием пружи 9 ны, через транспортирующий канал 202 в направлении U1, U2 вращения могут транспортироваться также более толстые стебли 3 или одновременно их скопления (фиг. 8). Пружина 200 сжатия выполнена с возможностью регулирования ее жесткости. Далее, каждому втягивающе-транспортирующему устройству 4, 5 придан, по меньшей мере,один стебле- и растениеделитель 19, 20 в качестве разделительного элемента между обрабатываемой и остающейся массой, причем разделение стебельчатой массы может поддерживаться, например, приводимыми валиковыми элементами 23, 24, которые приданы стебле- и растениеделителям 19, 20 и снабжены червяком 21, 22. На фиг. 2, 3 в увеличенном перспективном виде изображены отрезки втягивающе-транспортирующего устройства 4, 5 согласно изобретению, причем на фиг. 3 не предусмотрены листо- и растениеподъемники 15. Как следует, в частности, из этих фигур, бесконечный транспортер 10, 11 согласно изобретению состоит из множества расположенных в ряд транспортирующих звеньев 25, 26 и представляет собой, таким образом, гибкую транспортирующую систему 27,которая может направляться по разным траекториям движения. В изображенном примере выполнения транспортирующие звенья 25, 26 гибкой транспортирующей системы 27 направляются в рабочей ветви 18 по прямолинейной и заданной посредством направляющей планки 28 траектории движения, причем удерживающая кромка 29 каждого транспортно-направляющего элемента 25, 26 входит в прорезь 30 направляющей планки 28. Как видно из фиг. 16, 17, вместо удерживающей кромки 29 может быть предусмотрен также подшипник скольжения или качения на оси 129, ведомый в направляющем канале 130 направляющей планки 128. В этом случае трение направляющей уменьшено за счет опоры. Например, тогда вместо трения скольжения обеспечено трение качения транспортирующих звеньев 25, 26 для их удержания и ведения с задней стороны в направлении U1 или U2 вращения, что уменьшает сопротивление трения. Далее, на фиг. 17 видно, что режущий орган 31, который должен иметь возможность легкой замены при износе, удерживается только единственным центральным винтом 134, фиксация положения происходит за счет изогнутой пластины 135, которая входит в выемку 136 удерживающего режущий орган 31 пластинчатого тела 44. К прямолинейной рабочей ветви 18 примыкают огибание в форме дуги окружности(фиг. 1) вблизи зоны 14 выгрузки и передачи бесконечного транспортера 10, 11, а также проходящая прямолинейно холостая ветвь 18.1 и дополнительное огибание в форме дуги окружности во внешней огибной зоне. В альтернативном выполнении изобретения либо рабочая ветвь 18 может иметь траекторию движения,выпуклую в направлении F движения и уборки 10 или против него, либо в огибных зонах бесконечного транспортера 10, 11, в частности в лежащей вблизи зоны 14 выгрузки и передачи внутренней огибной зоне, может происходить изменение направления бесконечного транспортера 10, 11 вокруг нескольких приводных и/или огибных колес. Тогда бесконечный транспортер 10, 11 движется в огибной зоне, по меньшей мере, на одном участке прямолинейно против направления движения. Принципиальная конструкция первого варианта транспортно-направляющего элемента 25, 26, а также составленный из них бесконечный транспортер 10, 11 согласно изобретению следуют из фиг. 4-6. Как видно, в частности, на фиг. 4, транспортно-направляющие элементы 25, 26 бесконечных транспортеров 10, 11 разделены на три лежащие на расстоянии друг над другом транспортно-направляющие плоскости А, В, С. В этих транспортно-направляющих плоскостях размещены поводки 31, которые выполняют либо функцию ответного лезвия 32,33 и за счет этого во взаимодействии с находящимся под транспортно-направляющими элементами 25, 26 и неподвижным режущим ножом 34 образуют скашивающе-режущее устройство 35, либо функцию держателя 36 для ведения стебельчатой массы 3 при передаче к перерабатывающему устройству по типу измельчающего агрегата измельчителя. В транспортнонаправляющей плоскости А расположены выполненные в виде ответных лезвий 32, 33 поводки 31, тогда как в транспортно-направляющих плоскостях В, С размещены предусмотренные в качестве держателей 36 поводки 31. В рамках изобретения, однако, возможно также разделение транспортно-направляющих элементов 25, 26 на две или более чем три транспортно-направляющие плоскости. На фиг. 5 изображена предпочтительная форма выполнения транспортно-направляющего элемента 25, 26. При этом для упрощения монтажа при сборке бесконечного транспортера 10,11 предусмотрено разделение транспортнонаправляющих элементов 25, 26 на нижний 37 и верхний 38 участки. Участки 37, 38 транспортно-направляющего элемента 25, 26 выполнены преимущественно так, что место разделения, в котором участки 37, 38 могут быть соединены между собой, лежит в транспортно-направляющей плоскости В. Из этого следует, что нижний участок 37 состоит, в основном, из опоры 39 для размещения выполненного в виде ответного лезвия 32, 33 поводка 31, верхней соединительной пластины 40 и прочно приваренного между опорой 39 и верхней соединительной пластиной 40 аналогично соединительной перемычке направляющего тела 41 для скребка 42(фиг. 7). На догоняющей относительно направления U1, U2 вращения бесконечного транспортера 10, 11 стороне транспортно-направляющего элемента 25, 26 предусмотрен опорный корпус 11 43, который соединен также посредством сварного соединения с остальными деталями участка 37. Опорный корпус 43 образует одновременно уступ для привода бесконечного транспортера 10, 11 через приводное колесо 12, 13. Приводное колесо 12, 13 (фиг. 8) имеет, в свою очередь, соответствующие уступам или опорным корпусам 43 выемки 13.2. Бесконечный транспортер 10, 11 образует, тем самым, в целом, компактный закрытый узел. Для закрепления выполненного в виде ответного лезвия 32,33 поводка 31 на нижней стороне опоры 39 предусмотрены, например, посадочные штифты (не показаны), которые входят в отверстия пластинчатой детали 44 ответных лезвий 32, 33, так что ответные лезвия 32, 33 могут быть тогда фиксированы путем ввинчивания крепежных винтов,выполненных в виде винтов с потайной головкой, с нижней стороны ответных лезвий 32, 33. Сами ответные лезвия 32, 33 выполнены крюкообразными, причем на выступающей относительно нижнего участка 37 транспортнонаправляющих элементов 25, 26 части выполнена клинообразно заточенная режущая кромка. Верхний участок 38 состоит, в основном, из пластинчатого тела 45, лежащего в удерживающей стебельчатую массу транспортнонаправляющей плоскости В, и находящегося в плоскости С удержания пластинчатого тела 46,причем между обоими пластинчатыми телами 45, 46 с ними посредством сварного соединения прочно соединен аналогично соединительной перемычке дополнительный вертикальный отклоняющий щиток 47 для образования закрытой передней поверхности и для взаимодействия со скребком 48 (фиг. 7). В пластинчатое тело 45 транспортно-направляющей плоскости В на опережающей относительно направления U1,U2 вращения бесконечного транспортера 10, 11 стороне вставлен опорный палец 49, жестко соединенный с пластинчатым телом 45. Над пластинчатым телом 46 транспортно-направляющей плоскости С, действующей в качестве плоскости удержания стебельчатой массы 3,находится свинчиваемая одной стороной с пластинчатым телом 46 крышка 50 для закрывания свободного пространства между пластинчатыми телами 46 двух соседних транспортно-направляющих элементов 25, 26, необходимого для прохождения бесконечного транспортера 10, 11 через огибную зону. Крышка 50 может быть изогнутой (фиг. 16), так что в огибной зоне крышки соседних транспортирующих звеньев 25, 26 могут надвигаться друг на друга, что гарантирует, в целом, хорошую защиту транспортера 10, 11 от загрязнения также сверху. Особое значение для бесперебойного захвата и ведения стебельчатой массы 3 в транспортно-направляющих элементах 25, 26 бесконечного транспортера 10, 11 придается форме и пространственному расположению выступов 51,52 пластинчатых тел 45 в транспортно-направ 003042 12 ляющей плоскости В и выступов 53, 54 пластинчатых тел 46 в транспортно-направляющей плоскости С. У изображенной на фиг. 5, 6 формы выполнения между выступами 51, 52 и 53, 54 находится промежуток 55 для приема стебельчатой массы 3 (фиг. 4, 6), причем промежуток 55 ограничен обращенными друг к другу кромками 56, 57, 58, 59 выступов 51, 52 и 53, 54. Как видно из фиг. 4, 6, на надежное удержание стебельчатой массы 3 в промежутке 55 влияние оказывают, главным образом, форма и расположение кромок 57, 58 транспортно-направляющего элемента 25, 26. Поэтому ограничивающие промежуток 55 и приблизительно параллельные друг другу кромки 57, 58 имеют такую ориентацию,при которой они, как показано на фиг. 6, заключают с плоскостью 62, проходящей через концевые оси 60, 61 поворота транспортно-направляющего элемента 25, 26, угол W, лежащий преимущественно в диапазоне, который равен или меньше 90. Из-за этого, в частности, кромка 57 выступа 52 представляет собой препятствие,которое затрудняет непреднамеренное выпадение стебельчатой массы 3 из промежутка 55 транспортно-направляющего элемента 25, 26. Для выступов 51, 52 пластинчатого тела 45 в транспортно-направляющей плоскости В в качестве оптимальной конструктивной формы, если смотреть из транспортно-направляющей плоскости А, В, С, напрашивается смещенный против направления U1, U2 вращения прямоугольник(параллелограмм), тогда как у выступов 53, 54 пластинчатого тела 46 транспортно-направляющей плоскости С предпочтительной является приблизительно треугольная конструктивная форма. В усовершенствованном варианте изобретения имеется возможность снабжения пластинчатого тела 45 в транспортно-направляющей плоскости В только одним выступом 52, а пластинчатого тела 46 в транспортно-направляющей плоскости С - только одним выступом 53,так что тогда возникает ограниченный кромками 57, 58 промежуток 55 для приема стебельчатой массы 3, причем кромки 57, 58 ориентированы, по меньшей мере, приблизительно параллельно друг другу. Для улучшения удерживающего действия стебельчатой массы 3 в промежутке 55 транспортно-направляющих элементов 25, 26 в примере выполнения пластинчатое тело 46 транспортно-направляющей плоскости В расположено со смещением назад к внутренней зоне 63 бесконечного транспортера 10, 11. За счет этого стебельчатая масса 3 также может занимать положение, слегка наклоненное назад против направления F движения и уборки, так что положение центра тяжести изменяется и поэтому стебель прочнее зажимается в промежутке 55. Также образуется больше свободного пространства, которое обеспечивает возможность приема в промежуток 55 еще одного стебля. Как видно далее из фиг. 5, 6, пластинчатые тела 45, 46 транспортно-направляющих плоско 13 стей В, С или опора 39 и пластинчатая часть 44 ответных лезвий 32, 33 содержат на опережающей относительно направления U1, U2 вращения бесконечного транспортера 10, 11 стороне сегменты 64, 65, 66, 67 в форме дуги окружности, тогда как на догоняющей относительно направления U1, U2 вращения стороне выполнены выемки 68, 69, 70, 71 в форме сектора окружности. В собранном состоянии эти сегменты 64,65, 66, 67 в форме дуги окружности и выемки 68, 69, 70, 71 в форме сектора окружности входят с небольшим зазором друг в друга и, вопервых, способствуют тому, что размещенные в опорном корпусе 43 опорные элементы 72 с помощью эффективного покрытия защищены от грязи, а, во-вторых, это препятствует возникновению на транспортно-направляющих элементах 25, 26 согласно изобретению из-за выступающих кромок сбоев в ходе уборки из-за зажима остатков массы. Поскольку в зоне транспортно-направляющей плоскости В предусмотрено место разделения, то, конечно, и соединительные пластины 40, необходимые для создания соединения между нижним 37 и верхним 38 участками, снабжены соответствующими сегментами в форме дуги окружности и выемками в форме сектора окружности. Поворотное соединение 73 (фиг. 5) образуется за счет того, что нижний участок 37, в опорном корпусе 43 которого размещены опорные элементы 72, выполненные в виде герметичных, не требующих обслуживания подшипников качения или радиальных шарикоподшипников, вводят в имеющее форму кармана свободное пространство нижнего участка 37 догоняющего транспортно-направляющего элемента 25, 26, так что затем при сборке участков 37, 38 опорный палец 49 верхнего участка 38 проходит сквозь отверстия 74, 75 и, тем самым, одновременно сквозь опорные элементы 72 нижнего отрезка опережающего транспортно-направляющего элемента 25, 26. Для фиксации участков 37, 38 может служить резьбовое соединение (не показано), которое смонтировано в отверстии 76 соединительной пластины 40 и отверстии (не показано) пластинчатого тела 45. Вышеприведенное описание транспортнонаправляющих элементов 25, 26 и назначение ссылочных позиций относятся к изображенной на фиг. 5 форме выполнения, используемой по отношению к направлению F движения и уборки с правой стороны уборочного агрегата 1. Для использования с левой стороны используют выполненные зеркально-симметричными детали с теми же ссылочными позициями. Как видно, в частности, из фиг. 7, между транспортно-направляющими плоскостями А-В и В-С каждого транспортно-направляющего элемента 25, 26 находятся направляющие элементы 41, 47, взаимодействующие со скребком 42, 48. Согласно изобретению направляющие элементы 41, 47 имеют такой направленный к 14 скребкам 42, 48 контур 77, 78, что может быть достигнуто приблизительно лишенное движения (без рывков и толчков) соскребание стебельчатой массы 3 с бесконечного транспортера 10, 11 в зоне 14 выгрузки и передачи к перерабатывающему устройству S типа измельчающего агрегата измельчителя. Для этого обращенный к скребкам 42, 48 контур 77, 78 выполнен,например, бочкообразным, причем кривизна контура 77, 78 при рассмотрении из одной из транспортно-направляющих плоскостей А, В, С соответствует кривизне кругообразной траектории движения бесконечного транспортера 10, 11 в зоне 14 выгрузки и передачи, так что, следовательно, кривизна контура 77, 78 также выполнена кругообразной. Как следует далее из фиг. 7,скребки 42, 48 объединены в одну конструктивную деталь и выполнены с возможностью перемещения посредством резьбового соединения 79 относительно рамного узла 80 втягивающетранспортирующего устройства 4, 5. Скребки 42, 48 расположены в зоне 14 подачи бесконечных транспортеров 10, 11 с обеих сторон и симметрично вертикальной продольной средней плоскости самоходной машины и образуют, тем самым, боковые направляющие для массы 3, посредством которых она попадает во входное отверстие измельчителя. Скребки 42,48, в основном, полностью ометают при этом промежуток между нижней плоскостью А резания, вышележащей первой плоскостью В удержания и верхней второй плоскостью С удержания. В своей задней части скребки 42, 48 объединены в установленное на ребро плоское тело,так что между ними не остается зазора. Только в передней части, где скребки 42, 48 воздействуют на переднюю поверхность 77, 78 бесконечных транспортеров 10, 11, предусмотрено горизонтальное разделение скребков 42, 48, с тем чтобы, тем самым, обеспечить прохождение образующего нижнюю плоскость В удержания пластинчатого тела 45 с его выступами 51, 52 между скребками 42, 48. Передние в направлении F движения, установленные на ребро кромочные зоны скребков 42, 48 расположены на близком расстоянии перед отклоняющими щитками 41, 47, так что они полностью сметаются скребками. Из-за бочкообразных передних поверхностей и обеспеченной за счет этого неломаной круговой траектории, которую отклоняющие щитки 41, 47 образуют в зоне 14 подачи, где они движутся над огибным колесом, расстояние от передних кромок скребков 42, 48 до отклоняющих щитков 41, 47 может поддерживаться постоянным. Расстояние между передними кромками и отклоняющими щитками 41, 47 остается постоянным. Даже если бы транспортирующие звенья направлялись в огибной зоне против направления движения прямолинейно, то с помощью выполненной тогда плоской поверхности отклоняющих щитков 41, 47 было бы возможным под 15 держание постоянным расстояния между ними и скребками 42, 48. Для улучшения очищающих свойств скребки 42, 48 могут быть установлены подпружиненными. Скребки 42, 48 могут быть фиксированы в функциональном положении. Для обеспечения ухода фиксация должна ослабляться. Скребки 42, 48 могут быть затем откинуты из функционального положения и, например, полностью очищены. Вместо фиксации можно также установить скребки подпружиненно с возможностью откидывания скребков с целью ухода против усилия пружины. Скребки 42, 48 состоят, например, из пружинной стали. При измельчении на поле уборочный агрегат 1 в качестве навесного орудия 2 для перерабатывающего устройства S по типу выполненного, в частности, в виде самоходной рабочей машины измельчителя в примере выполнения с расположенными слева и справа от середины измельчителя втягивающе-транспортирующими устройствами перемещают в близком к почве рабочем и эксплуатационном положении (фиг. 1) и/или, по меньшей мере, с частичной поддержкой относительно почвы посредством полозьев и т.п. Если смотреть в направлении F движения и уборки, то отдельные бесконечные транспортеры 10, 11 установлены немного с наклоном, так что их верхние покрытия в форме стола направлены сверху вниз назад вверх. Два размещенных соответственно на внешнем конце стебле- и растениеделителя ограничивают максимальную ширину захвата уборочного агрегата 1. Бесконечный транспортер 10, 11 каждого втягивающе-транспортирующего устройства 4, 5 движется с одной из скоростей движения в направлении U1, U2 вращения. При этом выполненные в виде крюкообразных ответных лезвий 32, 33 поводки 31 бесконечного транспортера 10, 11 захватывают стебельчатую массу 3, срезают ее за счет взаимодействия ответных лезвий 32, 33 с находящимся под бесконечным транспортером 10, 11 режущим ножом 34, а затем захватывают промежутком 55 между выступами 51, 52 и 53, 54 транспортно-направляющих элементов 25, 26. Стебельчатая масса 3 находится тогда в соответствии с изображениями на фиг. 4, 6 в слегка наклоненном против направленияU1, U2 вращения и против направления F движения и уборки положении и транспортируется в этом положении поперек направления F движения и уборки до зоны 14 выгрузки и передачи втягивающе-транспортирующего устройства 4,5. Посредством размещенных там скребков 42,48 стебельчатая масса 3 извлекается из промежутков 55 транспортно-направляющих элементов 25, 26 и может быть, тем самым, захвачена и измельчена последующим перерабатывающим устройством по типу измельчающего агрегата измельчителя. В альтернативном примере выполнения(фиг. 11-15) под плоскостью вращения транс 003042 16 портеров 10, 11 расположены подвижные режущие ножи, выполненные в данном примере в виде вращающихся дисков 112, 113. Диски 112,113 неподвижно установлены на рамах 80, относительно которых бесконечные транспортеры 10, 11 подвижны. Вместо вращающихся дисков рассматриваются также движущиеся возвратнопоступательно по отношению друг к другу линейные ножи. Вращающиеся диски 112, 113 могут быть расположены вплоть до зоны 14 подачи, в которой транспортировка производится к входному отверстию. Таким образом, равно хорошие условия резания созданы также для стеблей в зоне вертикальной продольной средней плоскости агрегата. Вращающиеся диски 112, 113 лежат параллельно плоскости вращения транспортирующего устройства 4, 5 и расположены непосредственно под ним на рамах 80. Вращающиеся диски 112, 113 расположены при этом перекрывая друг друга со смещением по высоте,причем диски 112 удерживаются в верхней, а диски 113 - в нижней плоскости. Эффективные зоны резания образуют, тем самым, только небольшой сектор вращающихся дисков 112, 113,так что при виде сверху соответственно эффективные зоны резания имеют лишь волнообразную линию. Таким образом, достигнуто приближение к прямолинейному режущему устройству. Привод дисков 112, 113 происходит посредством сцепленных между собой приводных колес 127, которые удерживаются под вращающимися дисками 112, 113 и приданы соответствующей раме 80. В краевой зоне зубчатые колеса 127 могут приводиться также посредством огибных колес, приводящих также бесконечные транспортеры 10, 11, через соответствующую передачу частоты вращения. Можно также полностью разъединить приводы для бесконечных транспортеров 10, 11 и для вращающихся дисков 112, 113. В любом случае за счет расположения в отдельных плоскостях достигается конструктивное разъединение, так что режущие ножи 112, 113 могут быть заменены без выполнения работ на бесконечных транспортерах 10,11. Режущие ножи 112, 113 могут двигаться с большой скоростью вращения и срезать стебли 3 в свободном резании. Возможно также взаимодействие с дополнительными режущими органами, которые могут находиться в нижней,соседней с режущими ножами 112, 113 плоскости транспортирующего устройства 4, 5. В улучшенном примере выполнения (фиг. 16, 17) предусмотрен дополнительный поводок 131, который расположен вплотную над поводком 31 плоскости А резания и своей передней в направлении вращения кромкой, в основном,совпадает с передней в направлении вращения кромкой поводка 31. Между названными поводками 31, 131 в зоне 14 подачи находится неподвижно располо 17 женное ответное лезвие 132 (фиг. 18), над и под которым на близком расстоянии проходят поводки 31, 131. При этом происходит разрезание приставших к поводкам 31, 131 частей растений, в частности волокон, например, вялых листьев. Это препятствует наматыванию подобных волокон на поводки 31, 131 и ограничению режущей и направляющей способности подобных поводков. Поводок 131 может иметь направленные внутрь продолжения 133, которыми он удерживается в выемках отклоняющего щитка 41 и сварен с ним на задней стороне, так что передняя сторона может быть выполнена точно пластинчатой и плоской и на переходе к отклоняющему щитку 41 под прямым углом, что обеспечивает очень малые расстояния до неподвижного ответного лезвия 132 и скребка 42. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Уборочный агрегат (1) для уборки кукурузы и подобных стебельчатых культур, причем уборочный агрегат содержит, по меньшей мере,один вращающийся бесконечный транспортер(10; 11) для захваченной стебельчатой массы,который на одном конце образует зону (14) подачи массы к входному отверстию устройства дальнейшей переработки, в частности измельчителя, причем бесконечный транспортер содержит шарнирно удерживаемые друг на друге транспортирующие звенья (25; 26) и имеет, по меньшей мере, одну нижнюю плоскость (А) резания, включающую в себя направленные наружу режущие органы, и, по меньшей мере, одну вышележащую, включающую в себя направленные наружу удерживающие органы плоскость(В; С) удержания стеблей массы, отличающийся тем, что обращенная к режущим и удерживающим органам передняя сторона (77; 78) бесконечного транспортера (10; 11) выполнена, по существу, закрытой. 2. Агрегат по п.1, отличающийся тем, что бесконечный транспортер (10; 11) имеет одну нижнюю плоскость (А) резания и две вышележащие плоскости (В; С) удержания, снабженные каждая удерживающими органами для стебельчатой массы. 3. Агрегат по п.1 или 2, отличающийся тем, что удерживающие органы (53; 54) верхней плоскости (С) удержания смещены против направления (F) движения относительно удерживающих органов (51; 52) нижней плоскости (В) удержания в зоне рабочей ветви бесконечного транспортера (10; 11). 4. Агрегат по одному из пп.1-3, отличающийся тем, что транспортирующие звенья (25; 26) бесконечного транспортера (10; 11) выполнены монолитными или образованы прочно соединенными между собой частями. 5. Агрегат по одному из пп.1-4, отличающийся тем, что для образования закрытой передней поверхности соответствующих транс 003042 18 портирующих звеньев (25; 26) между плоскостью (А) резания и первой плоскостью (В) удержания расположен образующий составную часть транспортирующего звена (25; 26) первый отклоняющий щиток (41), а между первой (В) и второй (С) плоскостями удержания - второй отклоняющий щиток (47), при этом отклоняющие щитки (41; 47) проходят между шарнирными осями (60; 61) соответствующих транспортирующих звеньев. 6. Агрегат по п.5, отличающийся тем, что отклоняющие щитки (41; 47) имеют бочкообразную форму, а отклоняющие щитки (41; 47) соседних транспортирующих звеньев (25; 26) образуют в зоне (14) подачи, в которой происходит изменение направления бесконечного транспортера (10; 11), по существу, замкнутую при виде сверху, неломаную траекторию движения. 7. Агрегат по одному из пп.1-6, отличающийся тем, что бесконечный транспортер (10; 11) установлен в раме, причем раме придан режущий нож (34), по отношению к которому бесконечный транспортер (10; 11) является относительно подвижным. 8. Агрегат по п.7, отличающийся тем, что бесконечный транспортер (10; 11) содержит в своей плоскости (А) резания нижний поводок(32; 33), который в качестве ответного лезвия взаимодействует с режущим ножом (34). 9. Агрегат по одному из пп.1-8, отличающийся тем, что закрытой передней поверхности бесконечного транспортера (10; 11) придан, по меньшей мере, один скребок (42; 48), по отношению к которому бесконечный транспортер является относительно подвижным, причем скребок или скребки (42; 48) расположен или расположены в зоне (14) подачи бесконечного транспортера (10; 11). 10. Агрегат по п.9, отличающийся тем, что скребок или скребки (42; 48) выполнены в виде установленных, по существу, на ребро, жестких элементов, расположенных каждый между плоскостями (А; В; С) резания и/или удержания бесконечного транспортера. 11. Агрегат по п.9 или 10, отличающийся тем, что скребок или скребки (42; 48), в основном, полностью ометают промежуток между плоскостью (А) резания и плоскостью (В) удержания и/или между двумя плоскостями (В; С) удержания. 12. Агрегат по одному из пп.9-11, отличающийся тем, что скребок (42; 48) установлен в зоне подачи (14), простирается своим свободным концом, в основном, в направлении (F) движения вперед и входит в криволинейную огибную зону бесконечного транспортера (10; 11). 13. Агрегат по п.12, отличающийся тем,что скребки (42; 48) расположены с обеих сторон входного отверстия для агрегата дальней 19 шей переработки и образуют боковые направляющие поверхности для скошенной массы. 14. Агрегат по одному из пп.9-13, отличающийся тем, что скребки (42; 48) объединены в одну конструктивную деталь для двух лежащих друг над другом отклоняющих щитков (41; 47). 15. Агрегат по одному из пп.9-14, отличающийся тем, что скребки (42; 48) состоят из пружинной стали. 16. Агрегат по одному из пп.9-15, отличающийся тем, что скребки (42; 48) податливо поддержаны пружинящей опорой. 17. Агрегат по одному из пп.9-16, отличающийся тем, что первая плоскость (В) удержания бесконечного транспортера образована за счет того, что каждое транспортирующее звено(10; 11) содержит в плоскости (В) удержания, по меньшей мере, один поводок (51; 52), являющийся частью лежащего в транспортнонаправляющей плоскости пластинчатого тела(45), причем пластинчатое тело (45) имеет, по меньшей мере, один отстоящий наружу поперек направления (U1; U2) вращения бесконечного транспортера (10; 11) выступ, образующий поводок (51; 52). 18. Агрегат по одному из пп.1-17, отличающийся тем, что вторая удерживающая плоскость (С) удержания бесконечного транспортера(10; 11) образована за счет того, что каждое транспортирующее звено (25; 26) содержит в плоскости (С) удержания, по меньшей мере,один поводок (53; 54), являющийся частью лежащего в транспортно-направляющей плоскости пластинчатого тела (46), причем пластинчатое тело (46) имеет, по меньшей мере, один отстоящий наружу поперек направления (U1; U2) вращения бесконечного транспортера (10; 11) выступ, образующий поводок (53; 54). 19. Агрегат по п.17 или 18, отличающийся тем, что пластинчатое тело (45; 46) имеет два отстоящих вперед выступа (51, 52; 53, 54). 20. Агрегат по п.19, отличающийся тем,что между выступами (51, 52; 53, 54) каждого пластинчатого тела (45; 46) и выступами (51, 52; 53, 54) лежащего в той же плоскости (В; С) соседнего пластинчатого тела (45; 46) образованы приблизительно одинаковые по величине промежутки. 21. Агрегат по одному из пп.17-20, отличающийся тем, что пластинчатые тела (45; 46) плоскостей (В; С) удержания имеют по два выступа (51, 52) и (53, 54). 22. Агрегат по одному из пп.17-21, отличающийся тем, что выступы (51; 52), по меньшей мере, одной плоскости (45) удержания выполнены в виде ориентированных в форме параллелограмма плоских тел. 23. Агрегат по одному из пп.17-22, отличающийся тем, что выступы (53; 54) выполнены расширяющимися против направления (F) движения и, тем самым, промежуток (55) между 20 выступами (53; 54) уменьшается в зоне рабочей ветви (18) против направления (F) движения. 24. Агрегат по одному из пп.17-23, отличающийся тем, что в нижней плоскости (В) удержания выполнены, в основном, в виде параллелограмма (51; 52), а в верхней плоскости(С) удержания - в виде треугольника (53; 54) выступы пластинчатых тел (45; 46) и скошенные стебли (3) удерживаются, с одной стороны,в остром углу (W) между параллелограммообразным выступом (51; 52) и передней кромкой(45 а) пластинчатого тела (45) и, с другой стороны, в углу между треугольным выступом (53; 54) и передней кромкой (46 а) пластинчатого тела (46) верхней плоскости (С) удержания. 25. Агрегат по п.24, отличающийся тем,что приемное пространство (55) для скошенных стеблей (3), образованное действующими в качестве удерживающих элементов выступами(51, 52; 53, 54) названных плоскостей (В; С) удержания, сужается против направления (F) движения. 26. Агрегат по одному из пп.17-25, отличающийся тем, что передняя кромка (45 а; 46 а) пластинчатых тел (45; 46) между выступами (51,52; 53, 54) выполнена, по существу, в форме дуги окружности. 27. Агрегат по одному из пп.17-26, отличающийся тем, что каждое пластинчатое тело(45; 46) имеет параллельно направлению (U1;U2) вращения на одном конце расширение (64; 65), по существу, в форме дуги окружности, а на другом конце - соответствующую выемку (68; 69), причем пластинчатые тела (45; 46) соседних транспортирующих звеньев (25; 26) в собранном состоянии входят друг в друга с небольшим зазором. 28. Агрегат по одному из пп.1-27, отличающийся тем, что пластинчатое тело (44), несущее выполненный в виде ответного лезвия поводок (31), имеет параллельно направлению(U1; U2) вращения также на одном конце сегмент (66; 67) в форме дуги окружности, а на другом конце - соответствующую выемку (70), и соседние пластинчатые тела (44) входят друг в друга с небольшим зазором. 29. Агрегат по одному из пп.1-28, отличающийся тем, что кривизна отклоняющих щитков (41; 47), как и кривизна передней кромки (44 а; 45 а; 46 а) пластинчатых тел (44; 45; 46) выполнена в форме дуги (64) окружности. 30. Агрегат по п.26, отличающийся тем,что радиус кривизны, в основном, соответствует радиусу огибного или приводного колеса, расположенного вблизи зоны (14) подачи бесконечного транспортера (10; 11) к перерабатывающему устройству. 31. Агрегат по одному из пп.1-28, отличающийся тем, что каждое транспортирующее звено (25; 26) бесконечного транспортера (10; 11) выполнено с возможностью составления из двух участков (37; 38) и фиксации. 21 32. Агрегат по одному из пп.1-31, отличающийся тем, что соседние транспортирующие звенья (25; 26) имеют выполненное с возможностью поворотного движения соединение (73). 33. Агрегат по п.32, отличающийся тем,что поворотное соединение (73) между соседними транспортирующими звеньями (25; 26) создается посредством приданного верхнему участку (38) опорного пальца (49) и принимающего опорный палец опорного рыма (43) нижнего участка (37) соседнего транспортирующего звена (25; 26). 34. Агрегат по п.33, отличающийся тем,что в качестве опор (72) поворотных соединений (73) предусмотрены герметичные подшипники качения или радиальные шарикоподшипники, при этом имеющие форму дуги окружности сегменты (64; 66; 67) пластинчатых тел (44; 45; 46) образуют крышку опор (72). 35. Агрегат по одному из пп.31-34, отличающийся тем, что участки (37; 38) транспортирующего звена (25; 26) свинчены между собой. 36. Агрегат по одному из пп.31-35, отличающийся тем, что верхний участок (38) включает в себя пластинчатые тела (45; 46) с образующими плоскости удержания выступами (51; 52; 53; 54) и промежуточным отклоняющим щитком (47), а нижний участок (37) включает в себя выполненные в виде поводков ответные лезвия (31) и дополнительный отклоняющий щиток (41). 37. Агрегат по одному из пп.1-36, отличающийся тем, что бесконечный транспортер(10; 11) имеет на транспортирующих звеньях(25; 26) уступы для взаимодействия с приводом,которые образованы гильзообразными элементами (43), образующими опорный рым. 38. Агрегат по п.37, отличающийся тем,что для привода бесконечного транспортера (10; 11) предусмотрены, по меньшей мере, два противоположных друг другу огибных колеса, воздействующих на уступы (43) и вызывающих вращение транспортирующих звеньев (25; 26),при этом приводное колесо бесконечного транспортера (10; 11) придано зоне подачи (14) к устройству дальнейшей переработки и в этой зоне подачи (14) происходит изменение направления бесконечного транспортера (10; 11). 39. Агрегат по одному из пп.1-38, отличающийся тем, что зона приводного колеса бесконечного транспортера (10; 11) способна разместить дополнительные транспортеры, приводимые во вращение вокруг оси (12.1; 13.1) вращения. 40. Агрегат по одному из пп.1-39, отличающийся тем, что транспортирующие звенья(25; 26) бесконечного транспортера (10; 11) при своем движении проходят между приводными и огибными колесами. 41. Агрегат по одному из пп.1-40, отличающийся тем, что транспортирующие звенья(29; 129) зацепления, ориентированным параллельно направлению (U1; U2) вращения и входящим в соответствующую выемку (30; 130) направляющей планки (28; 128). 42. Агрегат по п.41, отличающийся тем,что орган (129) зацепления образован направленной вверх осью, содержащей подшипник скольжения или качения для своего перемещения в выемке (130). 43. Агрегат по одному из пп.1-42, отличающийся тем, что предусмотрены два направленных вбок наружу и, по существу, при работе лежащих соосно рядом друг с другом бесконечных транспортера (10; 11). 44. Агрегат по одному из пп.1-43, отличающийся тем, что каждой раме, несущей бесконечный транспортер, приданы листо- и растениеподъемники (15), каждый из которых содержит пирамидообразное делительное острие (16),при этом каждому делительному острию (16) придана направляющая скоба (17), содержащая указывающую, в основном, в направлении (U1;U2) транспортировки консоль, проходящую до следующего листо- и растениеподъемника (15). 45. Агрегат по п.44, отличающийся тем,что направляющая скоба (17) установлена подпружиненно и за счет усилия пружины натянута для образования между нею и рабочей ветвью(18) бесконечного транспортера (10; 11) транспортирующего канала для транспортировки стебельчатой массы (3) против направления (F) движения. 46. Агрегат по одному из пп.1-45, отличающийся тем, что под бесконечными транспортерами расположены подвижные, отделенные от бесконечных транспортеров режущие ножи (112; 113). 47. Агрегат по п.46, отличающийся тем,что подвижные режущие ножи (112; 113) выполнены в виде вращающихся дисков и расположены в плоскости, находящейся непосредственно под плоскостью движения бесконечных транспортеров и параллельно траектории их движения. 48. Агрегат по п.47, отличающийся тем,что бесконечные транспортеры своей рабочей ветвью ометают проходящую поперек направления (F) движения зону транспортировки, а вращающиеся режущие ножи (112; 113) расположены под этой зоной транспортировки ступенчато рядом друг с другом. 49. Агрегат по одному из пп.46-48, отличающийся тем, что транспортирующие звенья содержат режущие органы, которые взаимодействуют в нижней плоскости с вращающимися режущими ножами (112; 113). 50. Агрегат по одному из пп.46-49, отличающийся тем, что вращающиеся режущие ножи (112; 113) установлены неподвижно относительно удерживающих бесконечные транспортеры (10; 11) рам (110; 111) и срезают массу (3) в свободном резании. 23 51. Агрегат по п.50, отличающийся тем,что вращающиеся режущие ножи (112; 113) проходят в двух плоскостях и установлены перекрывая друг друга со смещением по высоте. 52. Агрегат по одному из пп.1-51, отличающийся тем, что в зоне подачи (14) предусмотрено неподвижное ответное лезвие (132),под которым при работе на близком расстоянии проходит поводок (31) плоскости (А) резания и над которым проходит дополнительный пово 003042 24 док (131), лежащий параллельно над поводком(31). 53. Агрегат по п.52, отличающийся тем,что верхний поводок (131) фиксирован на транспортирующих звеньях (25; 26) транспортеров (10; 11) посредством проходящих через отклоняющий щиток (41) и закрепленных на задней стороне выступов (133).
МПК / Метки
МПК: A01D 45/02
Метки: агрегат, уборочный, культур, стебельчатых
Код ссылки
<a href="https://eas.patents.su/15-3042-uborochnyjj-agregat-dlya-stebelchatyh-kultur.html" rel="bookmark" title="База патентов Евразийского Союза">Уборочный агрегат для стебельчатых культур</a>
Уборочный агрегат
Номер патента: 3041
Опубликовано: 26.12.2002
Авторы: Кроне Бернард, Келлер Альфонс, Алер Вильхельм
МПК: A01D 45/02
Формула / Реферат:
1. Уборочный агрегат (1) для уборки кукурузы или подобных стебельчатых культур, причем уборочный агрегат (1) содержит, по меньшей мере, одну снабженную удерживающими органами (17; 18) для скошенных растений (3) звенную цепь (4; 5) со стороной (4а; 5а) рабочей ветви, при работе перемещающейся поперек направления (F) движения уборочного агрегата (1), отличающийся тем, что измеренная в направлении (U1; U2) вращения протяженность (Т) одного звена...
Плавильный агрегат с дуговой печью
Номер патента: 1378
Опубликовано: 26.02.2001
Автор: Фукс Герхард
МПК: C21C 5/52, F27B 3/18, F27D 13/00...
Метки: агрегат, дуговой, плавильный, печью
Формула / Реферат:
1. Плавильный агрегат с дуговой печью (1), имеющей кожух (3), состоящий из нижней части (5) и верхней части (6), а также свод (4), состоящий из первой и второй секций (7, соответственно 8), из которых первая секция (7) выполнена, по меньшей мере, с одним отверстием (14) для электрода, а вторая секция (8) содержит закрепленную на опорной тележке (21) шахту (9), имеющую закрываемое загрузочное отверстие и газоходное отверстие (32) на верхнем...
Способ выращивания и уборки зерновых культур и устройство для его осуществления
Номер патента: 2650
Опубликовано: 29.08.2002
Авторы: Чуксин Петр Иванович, Шпаковский Николай Андреевич
МПК: A01C 1/00, A01D 41/08, A01F 12/44...
Метки: культур, зерновых, устройство, выращивания, осуществления, способ, уборки
Формула / Реферат:
1. Способ выращивания зерновых культур, включающий, по меньшей мере, один цикл, предусматривающий выделение биологически ценного зерна, посев в качестве семян биологически ценного зерна, уборку растений на корню методом очеса, отличающийся тем, что выделение и отбор биологически ценного зерна производят в процессе очеса. 2. Способ по п.1, отличающийся тем,что способ предусматривает, по меньшей мере, два цикла, причем часть биологически ценного...
Хлопкоуборочная машина и агрегат для уборки рядов хлопчатника
Номер патента: 433
Опубликовано: 26.08.1999
Авторы: Копли Рассел Дин, Шрейнер Джоел Марвин
МПК: A01D 46/08
Метки: агрегат, хлопчатника, рядов, машина, уборки, хлопкоуборочная
Формула / Реферат:
1. Хлопкоуборочный агрегат для уборки посеянного рядами хлопчатника, содержащий корпус, образующий зону прохождения хлопчатника, простирающуюся по ходу движения агрегата от стеблеприемников до противоположного конца агрегата, канал для прохождения хлопка, расположенный по ходу движения в правом заднем конце агрегата, первый и второй уборочные барабаны со шпинделями, расположенные друг за другом справа от зоны прохождения хлопчатника и...
Фармацевтический препарат, содержащий клодронат в качестве активного ингредиента и агрегат микрокристаллической целлюлозы и диоксида кремния в качестве наполнителя
Номер патента: 2331
Опубликовано: 25.04.2002
Авторы: Рантала Эва-Мария Сусанне, Лехтола Вели-Матти, Рантала Пертти Тапани
МПК: A61K 9/20
Метки: препарат, микрокристаллической, фармацевтический, содержащий, агрегат, качестве, наполнителя, клодронат, диоксида, ингредиента, целлюлозы, кремния, активного
Формула / Реферат:
1. Фармацевтический препарат для перорального введения, включающий фармакологически приемлемую соль дихлорметиленбисфосфоновой кислоты и агрегат микрокристаллической целлюлозы и диоксида кремния, взятого в количестве примерно 0,1-20% от массы микрокристаллической целлюлозы. 2. Препарат по п.1, отличающийся тем, что он включает 5-25 мас.% агрегата микрокристаллической целлюлозы и диоксида кремния. 3. Препарат по п.1, отличающийся тем, что он...
Предыдущий патент: Уборочный агрегат
Следующий патент: Уборочный агрегат
Случайный патент: Электромагнитный клапан и автоматизированная система на основе этого клапана