Система управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины на содержащее загрузочный резервуар транспортное средство
Формула / Реферат
1. Система перегрузки сельскохозяйственного урожая, содержащая уборочную машину (10), два транспортных средства (12, 12') и систему управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины (10) на первое или второе транспортное средство (12, 12'), содержащее загрузочный резервуар (18, 18'), при этом
система управления содержит вычислительное устройство (88, 102) и контролирующий блок (112) и соединена с сенсорной системой (126, 126'), выполненной с возможностью определения уровня заполнения и/или наружных контуров загрузочного резервуара (18, 18'), и с исполнительными механизмами (46, 48, 50, 108, 110), выбранными из группы: исполнительный механизм (46), выполненный с возможностью поворота разгрузочного устройства (40), исполнительный механизм (48), выполненный с возможностью подъема разгрузочного устройства (40), направляющее устройство (108), выполненное с возможностью управления направлением движения транспортного средства (12, 12'), устройство (110) задания скорости, выполненное с возможностью контроля скорости транспортного средства (12, 12'),
причем система управления выполнена с возможностью автоматического контроля и управления положением выходного конца разгрузочного устройства (40) относительно уборочной машины (10) и/или направления выброса разгрузочного устройства (40) и/или положения первого транспортного средства (12) с первым загрузочным резервуаром (18) относительно уборочной машины (10) на основе сигналов сенсорной системы (126, 126') и посредством соответствующих исполнительных механизмов (46, 48, 50, 108, 110) так, что обеспечена возможность последовательной загрузки первого загрузочного резервуара (18) собранным урожаем,
сенсорная система (126, 126') дополнительно соединена с обрабатывающим устройством (130), выполненным с возможностью предоставления данных о положении второго загрузочного резервуара (18') в контролирующий блок (112) системы управления,
система управления выполнена с возможностью на основании сигналов сенсорной системы (126, 126') и посредством соответствующих исполнительных механизмов (46, 48, 50, 108, 110) автоматически направлять разгрузочное устройство (40) ко второму загрузочному резервуару (18') после распознавания в целом достаточного заполнения первого загрузочного резервуара (18), и система управления выполнена с возможностью определять достаточный уровень заполнения первого загрузочного резервуара (18) на основании сигналов сенсорной системы (126, 126') и/или на основании установленного на уборочной машине (10) датчика (118, 124) собранного урожая для измерения свойств собранного урожая,
отличающаяся тем, что система управления выполнена с возможностью после распознавания в целом достаточного заполнения первого загрузочного резервуара (18) перепроверять сигналы сенсорного устройства (126, 126'), определяющие второй загрузочный резервуар, и останавливать уборочную машину (10) для ожидания второго транспортного средства (12') со вторым загрузочным резервуаром (18') в случае, если не происходит определения второго загрузочного резервуара.
2. Система по п.1, отличающаяся тем, что датчик (118, 124) собранного урожая выполнен с возможностью измерения пропускной способности и/или массы, и/или составных веществ, и/или сухой массы.
3. Система по п.1 или 2, отличающаяся тем, что сенсорная система (126, 126') содержит формирующий изображение датчик, в частности работающую в двух или трех измерениях камеру или развертывающий в двух измерениях дальномер.
4. Система по любому из пп.1-3, отличающаяся тем, что система управления выполнена с возможностью направления разгрузочного устройства (40) на второй загрузочный резервуар (18') во время движения уборочной машины (10).
5. Система по любому из пп.1-3, отличающаяся тем, что система управления выполнена с возможностью останова уборочной машины (10) перед перенаправлением разгрузочного устройства на второй загрузочный резервуар (18'), при этом транспортные средства (12, 12') также выполнены с возможностью останова, или второй загрузочный резервуар (18') выполнен с возможностью занимать положение, которое перед этим имел первый загрузочный резервуар (18).
6. Система по любому из пп.1-5, отличающаяся тем, что система управления выполнена с возможностью автоматического контроля положения первого или второго транспортного средства (12, 12') со вторым загрузочным резервуаром (18') относительно уборочной машины (10).
7. Система по любому из пп.1-6, отличающаяся тем, что сенсорная система (126, 126') направлена на загрузочный резервуар (18, 18') сверху.
8. Система по любому из пп.1-7, отличающаяся тем, что сенсорная система (126, 126') закреплена на внешнем конце разгрузочного устройства (40) или на отдельном держателе (128) на уборочной машине (10).
9. Способ перегрузки собранного сельскохозяйственного урожая с уборочной машины (10) на транспортное средство (12, 12'), содержащее загрузочный резервуар (18, 18'), при котором система управления на основании сигналов, измеряющих уровень заполнения и/или наружный контур загрузочного резервуара сенсорной системы (126, 126'), автоматически контролирует положение выходного конца разгрузочного устройства (40) относительно уборочной машины (10), и/или направление выброса разгрузочного устройства (40), и/или положение транспортного средства (12, 12') с загрузочным резервуаром (18, 18') относительно уборочной машины (10) таким образом, что загрузочный резервуар (18, 18') последовательно загружается собранным урожаем;
сенсорная система (126, 126') дополнительно определяет положение второго загрузочного резервуара (18'), при этом система управления на основании сигналов сенсорного устройства (126, 126') автоматически направляет разгрузочное устройство (40) ко второму загрузочному резервуару (18') после распознавания в целом достаточного заполнения первого загрузочного резервуара (18);
система управления определяет достаточный уровень заполнения первого загрузочного резервуара (18) на основании сигналов сенсорной системы (126, 126') и/или на основании установленного на уборочной машине (10) датчика (118, 124) собранного урожая для измерения свойств собранного урожая,
отличающийся тем, что система управления после распознавания в целом достаточного заполнения первого загрузочного резервуара (18) перепроверяет сигналы сенсорного устройства (126, 126'), определяющие второй загрузочный резервуар, и в случае, если не происходит определения второго загрузочного резервуара, уборочная машина (10) останавливается для ожидания второго транспортного средства (12') со вторым загрузочным резервуаром (18').

Текст
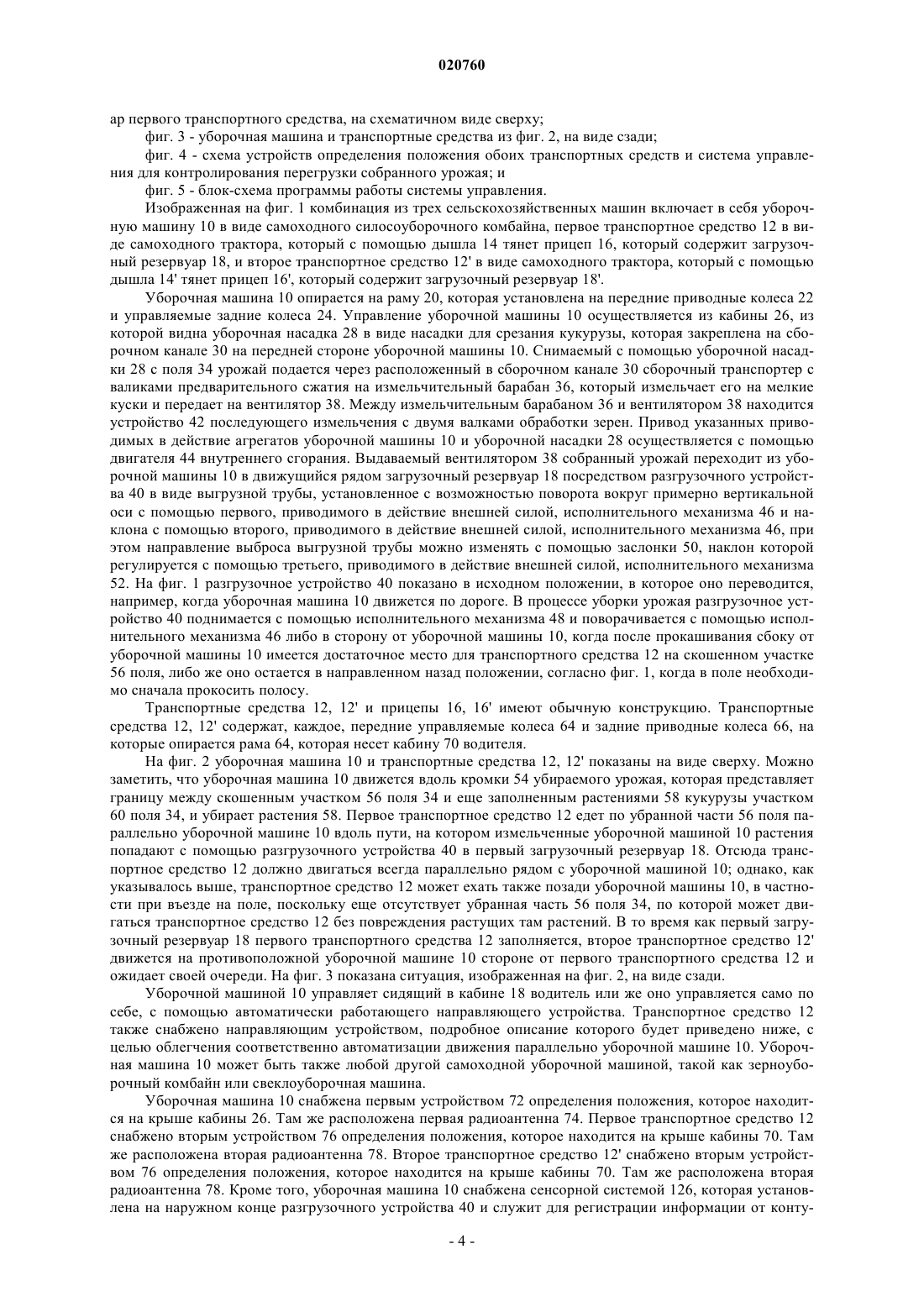
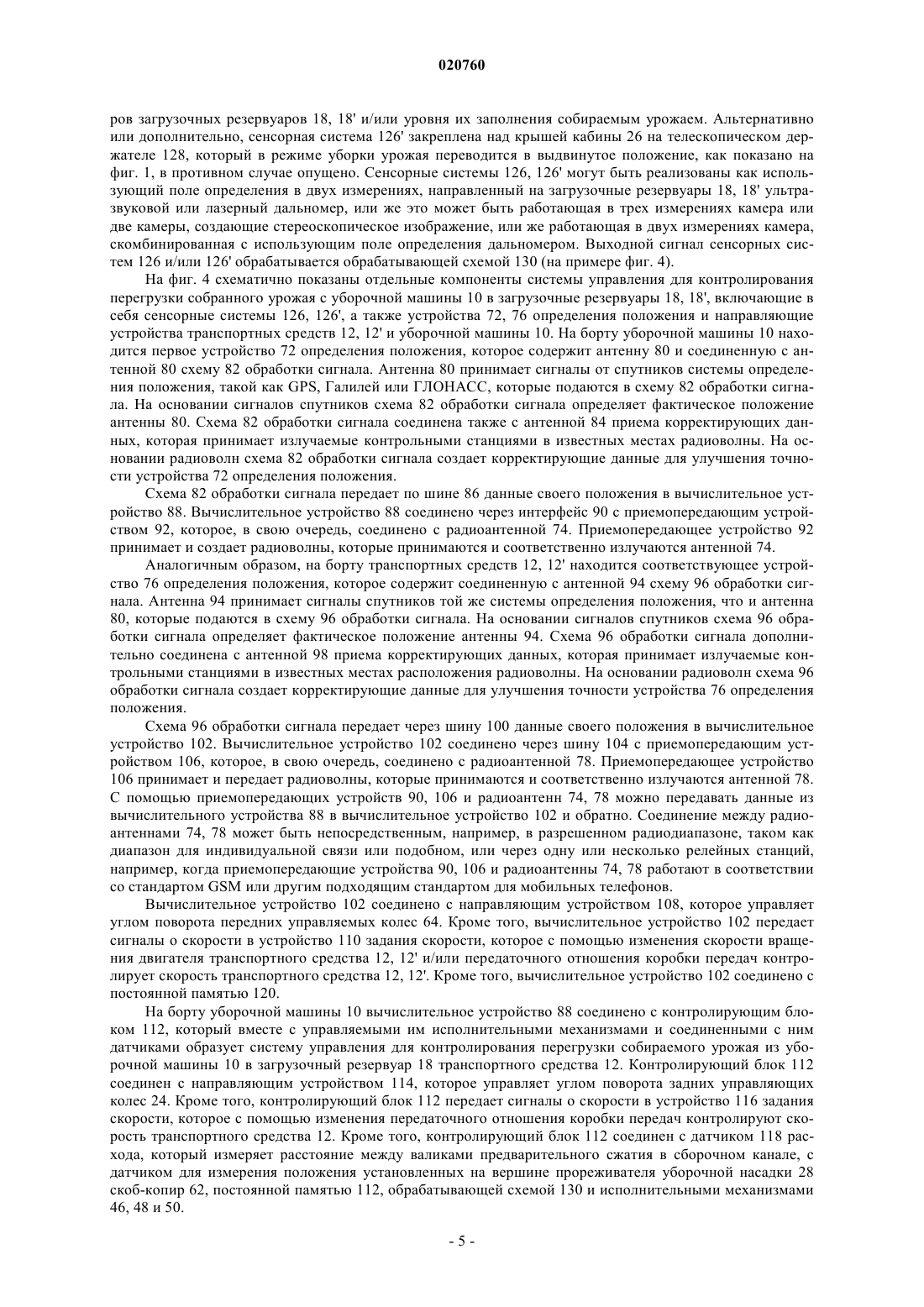
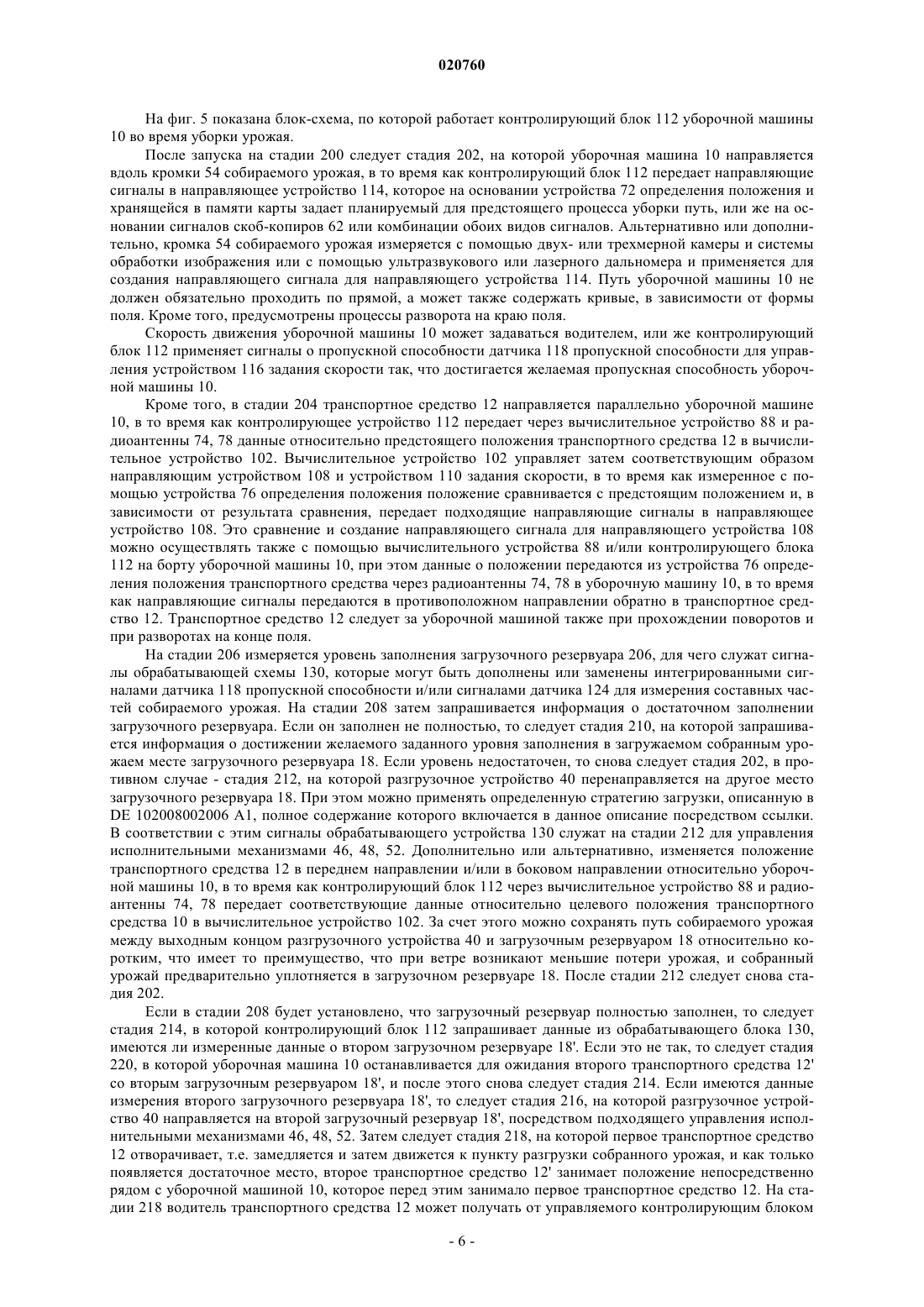
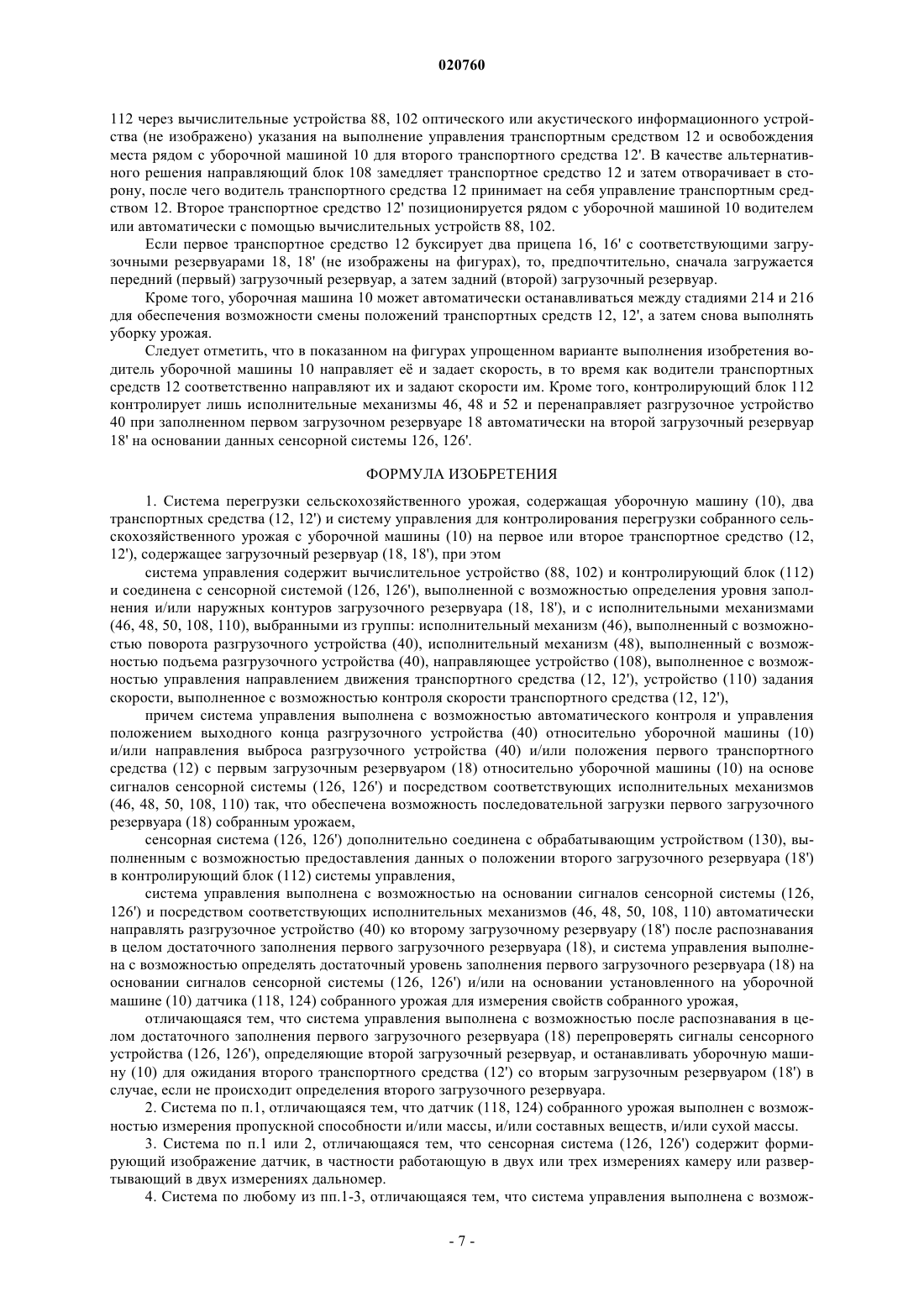
СИСТЕМА УПРАВЛЕНИЯ ДЛЯ КОНТРОЛИРОВАНИЯ ПЕРЕГРУЗКИ СОБРАННОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО УРОЖАЯ С УБОРОЧНОЙ МАШИНЫ НА СОДЕРЖАЩЕЕ ЗАГРУЗОЧНЫЙ РЕЗЕРВУАР ТРАНСПОРТНОЕ СРЕДСТВО Изобретение относится к системе управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины (10) на содержащее загрузочный резервуар(18, 18') транспортное средство (12, 12'), при этом система управления предназначена для автоматического регулирования на основе сигналов, измеряющих уровень заполнения и/или наружные контуры загрузочного резервуара (18, 18'), сенсорной системы (126, 126') положения выходного конца разгрузочного устройства (40) относительно уборочной машины (10) и/или направления выброса разгрузочного устройства (40) и/или положения транспортного средства (12,12') с загрузочным резервуаром (18, 18') относительно уборочной машины (10) таким образом,чтобы контролировать последовательное заполнение загрузочного резервуара (18, 18') собранным урожаем. Предлагается, что сенсорная система (126, 126') дополнительно предназначена для измерения положения второго загрузочного резервуара (18') и что система управления обеспечивает также возможность автоматического перенаправления разгрузочного устройства (40) на второй загрузочный резервуар (18') после распознавания в целом достаточного заполнения первого загрузочного резервуара (18) на основании сигналов сенсорного устройства (126, 126').(71)(73) Заявитель и патентовладелец: ДИР ЭНД КОМПАНИ (US) Область техники, к которой относится изобретение Изобретение относится к системе управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины на содержащее загрузочный резервуар транспортное средство, при этом система управления используется таким образом, чтобы основываясь на сигналах сенсорной системы, измеряющей уровень заполнения и/или наружные контуры загрузочного резервуара,автоматически регулировать таким образом положение разгрузочного конца разгрузочного устройства относительно уборочной машины, и/или направление выброса разгрузочного устройства, и/или местоположение транспортного средства с загрузочным резервуаром относительно уборочной машины так, что загрузочный резервуар последовательно заполняется собранным урожаем. Уровень техники При уборке сельскохозяйственных культур на поле на практике принято, что уборочная машина загружает собранным урожаем движущееся рядом с уборочной машиной транспортное средство. Загрузочный резервуар транспортного средства, которое может быть, например, трактором с прицепом или грузовым автомобилем, загружается во время движения собранным урожаем с помощью разгрузочного устройства уборочной машины, например в силосоуборочном комбайне через силосопровод и в зерновом комбайне через выгрузную трубу. Разгрузочное устройство закреплено, как правило, с возможностью поворота вокруг вертикальной оси на уборочной машине и с возможностью поворота между исходным положением, в котором оно ориентировано примерно параллельно продольной оси уборочной машины, и рабочим положением, в котором оно ориентировано поперек направления движения уборочной машины. Дополнительно к этому предусмотрена возможность изменения высоты разгрузочного конца разгрузочного устройства, также как и положения разгрузочной заслонки, которая задает угол, под которым выгружается собранный урожай. В случае регулируемых разгрузочных устройств, как это обычно применяется в силосоуборочных комбайнах, положением разгрузочного устройства в простейшем случае управляет вручную водитель уборочной машины, для чего в кабине в его распоряжении имеются устройства ввода, которые управляют служащими для регулирования разгрузочного устройства исполнительными механизмами. При этом водитель уборочной машины должен следить за тем, чтобы весь загрузочный резервуар транспортного средства достаточно заполнялся, что осуществляется с помощью последовательного направления разгрузочного устройства в различные места загрузочного резервуара. В том случае, если транспортное средство отклоняется вперед или назад или в сторону от своего заданного положения, необходимо вручную подстраивать положение разгрузочного устройства. Кроме того, водитель уборочной машины должен учитывать уровень заполнения загрузочного резервуара и инициировать замену транспортного средства,когда загрузочный резервуар оказывается достаточно заполненным. Это осуществляется, например, так,что водитель транспортного средства на сигнал рукой или другой сигнал водителя уборочной машины(или самостоятельно, когда он может распознавать, что загрузочный резервуар заполнен), уменьшает скорость, и другое транспортное средство двигается рядом с уборочной машиной, а затем разгрузочное устройство перенаправляется на разгрузочный резервуар другого транспортного средства, при этом в промежуточное время собранный урожай падает на почву и пропадает из производственной цепочки,или же рядом с уборочной машиной едут два транспортных средства, и водитель уборочной машины при достаточно заполненном резервуаре первого транспортного средства, которое, как правило, двигается рядом с уборочной машиной, перенаправляет разгрузочное устройство на загрузочный резервуар второго транспортного средства, двигающегося рядом с первым транспортным средством. Затем первое транспортное средство сбавляет свою скорость, отворачивает в сторону, и второе транспортное средство после этого двигается непосредственно рядом с уборочной машиной. При этом недостатком является то, что управление положением разгрузочного устройства и наблюдение за уровнем заполнения загрузочного резервуара отвлекает значительную часть внимания водителя, что приводит к его усталости. Перевод разгрузочного устройства на второе транспортное средство является трудной операцией, которая требует много опыта и сноровки для того, чтобы не потерять значительную часть собранного урожая. В DE 4403893 А 1 приведено описание силосоуборочного комбайна с разгрузочным устройством, в котором на выходном конце разгрузочного устройства расположен дальномер, который измеряет высоту уровня собранного урожая в загрузочном резервуаре. Как только собранный урожай достигает заданной высоты, разгрузочное устройство изменяет свое положение до тех пор, пока не будет заполнен весь загрузочный резервуар. При этом реализуется значительно разгружающая водителя уборочной машины автоматизация, которая, однако, требует дальнейшего перенаправления вручную разгрузочного устройства на второе транспортное средство, после заполнения загрузочного резервуара первого транспортного средства. В ЕР 1219153 А 2 предлагается переводить автоматически или вручную загрузочный резервуар относительно уборочной машины в положение, в котором его можно заполнять. В неподвижных разгрузочных устройствах (зерновой комбайн) при помощи устройства передачи данных на транспортное средство передается информация о положении разгрузочного устройства и согласовывается положение транспортного средства, в то время как подвижные разгрузочные устройства (силосоуборочный комбайн) на основе данных о положении загрузочного резервуара и их собственного положения автоматиче-1 020760 ски переводятся в положение, в котором они заполняют загрузочный резервуар. Когда водитель видит,что одна зона загрузочного резервуара достаточно заполнена собранным урожаем и после этого необходимо заполнять другую зону, водитель уборочной машины вручную меняет положение разгрузочного устройства. Если диапазон движения разгрузочного устройства больше недостаточен для достижения еще недостаточно заполненных зон загрузочного резервуара, то автоматически изменяется относительное положение транспортного средства по отношению к уборочной машине, что может осуществляться также в противоположном направлении относительно разгрузочного устройства. Когда загрузочный резервуар первого транспортного средства заполнен, оператор инициирует смену транспортного средства,или же смена транспортного средства на основе перегруженного количества материала происходит автоматически. Таким образом, разгрузочное устройство автоматически постоянно перенаправляется на определенную зону в загрузочном резервуаре. Однако с водителя уборочной машины не снимается задача наблюдения образующегося конуса насыпаемого собранного урожая в загрузочном резервуаре и, при необходимости, перевода разгрузочного устройства в новое положение при чрезмерном возрастании навалочного конуса. В ЕР 2020174 А 1, который можно рассматривать как типовой случай, приведено описание силосоуборочного комбайна с расположенной на наружном конце разгрузочного устройства камерой, которая регистрирует характеристические параметры разгрузочного устройства и уборочной машины и/или транспортного средства. Камера может также служить дальномером и измерять уровень заполнения загрузочного резервуара. Сигналы камеры применяются для управления положением разгрузочного устройства и/или транспортного средства таким образом, чтобы загрузочный резервуар заполнялся автоматически. Относительно перенаправления разгрузочного устройства на загрузочный резервуар второго транспортного средства сохраняются указанные применительно к DE 4403893 А 1 недостатки. Задача изобретения В основу изобретения положена задача создания системы управления для контролирования перегрузки сельскохозяйственного собранного урожая с уборочной машины на содержащее загрузочный резервуар транспортное средство, которая, с одной стороны, автоматически регулирует положение выходного конца разгрузочного устройства, и/или направление выброса разгрузочного устройства, и/или положение транспортного средства с загрузочным резервуаром относительно уборочной машины таким образом, чтобы загрузочный резервуар последовательно заполнялся, предпочтительно в соответствии с подходящей стратегией загрузки, собранным урожаем, и, которая, с другой стороны, обеспечивает также возможность автоматического перенаправления разгрузочного устройства на загрузочный резервуар второго транспортного средства при заполнении загрузочного резервуара первого транспортного средства. Сущность изобретения Эта задача решена согласно изобретению с помощью признаков п.1 и 9 формулы изобретения, при этом в других пунктах формулы изобретения приведены признаки, которые отражают предпочтительные варианты осуществления. Система управления служит для контролирования перегрузки собранного сельскохозяйственного урожая из разгрузочного устройства самодвижущейся, или прицепленной, или буксируемой уборочной машины в загрузочный резервуар транспортного средства. Система управления во время уборки урожая на основе сигналов измеряющих уровень заполнения и/или наружные контуры загрузочного резервуара сенсорной системы оказывает влияние на положение выходного конца разгрузочного устройства, и/или направление выброса разгрузочного устройства, и/или положение транспортного средства относительно уборочной машины. Последнее осуществляется тем, что система управления передает сигналы направления и/или скорости на устройство задания направления и/или соответственно скорости транспортного средства, или же на подходящее устройство индикации или громкоговоритель, транспортного средства,вследствие чего направление и соответственно контроль скорости осуществляется водителем транспортного средства. При этом собранный урожай с помощью системы управления, предпочтительно автоматически в соответствии со стратегией загрузки, последовательно укладывается в различных местах загрузочного резервуара. Сенсорная система измеряет не только уровень заполнения и соответственно контуры загрузочного резервуара, но также может измерять положение второго загрузочного резервуара, если он находится достаточно близко к уборочной машине. Второй загрузочный резервуар может перемещаться по полю с помощью второго транспортного средства или первого транспортного средства. Как только распознается, что первый загрузочный резервуар достиг заданного желаемого уровня заполнения, система управления автоматически перенаправляет разгрузочное устройство на второй загрузочный резервуар, для чего она использует сигналы сенсорной системы. Первое транспортное средство замедляется водителем (самостоятельно, после распознавания перевода разгрузочного устройства на второй загрузочный резервуар, или с помощью системы управления непосредственно через устройство задания направления, соответственно скорости транспортного средства, или же с помощью подходящих оповещений через устройство индикации или громкоговоритель) и отъезжает от уборочной машины для транспортировки собранного урожая к месту сбора, в то время как второе транспортное средство занимает положение, которое перед этим занимало первое транспортное средство, т.е., как правило, сбоку от уборочной машины. Когда первое транспортное средство тянет или несет второй загрузочный резервуар, то оно передвигается в положение, в котором можно загружать второй загрузочный резервуар; как правило, оно слегка продвигается вперед после заполнения первого загрузочного резервуара, который находится перед вторым загрузочным резервуаром. Затем заполняется второй загрузочный резервуар так же, как перед этим заполнялся первый загрузочный резервуар. Этот процесс повторяется, когда второй загрузочный резервуар заполнен, и разгрузочное устройство направляется на третий загрузочный резервуар третьего (когда транспортное средство буксирует или несет один загрузочный резервуар) или второго транспортного средства (когда каждое транспортное средство буксирует или несет два загрузочных резервуара). Таким образом, автоматизируется не только последовательная загрузка первого загрузочного резервуара, но также перевод разгрузочного устройства на второй загрузочный резервуар, что полностью снимает с оператора задачу регулирования перегрузки собранного урожая и обслуживания разгрузочного устройства. Для обеих задач используются сигналы сенсорной системы. Как указывалось выше, с помощью сенсорной системы измеряется уровень заполнения первого загрузочного резервуара, который затем используется для загрузки другого места в загрузочном резервуаре, когда уровень заполнения достигает определенной высоты, как указано в DE 4403893 А 1 и ЕР 2020174 А 1, полное содержание которых включается в данное описание посредством ссылки. Сигналы сенсорной системы могут служить также для распознавания достаточного заполнения первого загрузочного резервуара в целом, для инициирования перевода загрузочного резервуара на второй загрузочный резервуар. Альтернативно или дополнительно, заполнение первого загрузочного резервуара распознается при помощи установленного на уборочной машине датчика собранного урожая для измерения свойств собранного урожая. Датчик собранного урожая может измерять, например, пропускную способность,массу, составные части и/или сухую массу собранного урожая. Измеренные датчиком собранного урожая свойства собранного урожая интегрируются по времени и сравниваются с заданными значениями, которые могут зависеть от варианта выполнения (величины, вида и подобного) загрузочного резервуара. Это,а также применяемые стратегии загрузки, описаны в DE 102008002006 А 1, полное содержание которого включается в данное описание посредством ссылки. Сенсорная система предпочтительно содержит дающий изображение датчик, в частности дающую двухмерное изображение камеру, которую можно применять в комбинации с бесконтактным, например на основе измерения времени распространения оптических или акустических волн, дальномером, с целью получения значений расстояния для определения высоты уровня заполнения загрузочного резервуара. Можно применять также дающую трехмерное изображение камеру, которая может быть выполнена в виде так называемого фотонного смесителя (Photon Mixer Device). Дополнительно или альтернативно,применяется датчик расстояния, в частности лазерный дальномер, который сканирует подлежащую исследованию поверхность в двух измерениях, как описано в DE 102008015277 А 1, полное содержание которого включается в данное описание посредством ссылки. Сенсорная система целесообразно направлена сверху на загрузочный резервуар. Она может быть закреплена на наружном конце разгрузочного устройства или на отдельном держателе на уборочной машине на подходящей высоте. Перевод разгрузочного устройства с первого загрузочного резервуара на второй загрузочный резервуар можно осуществлять во время продолжения движения уборочной машины и транспортного средства, или же уборочная машина останавливается по указанию системы управления, прежде чем разгрузочное устройство переводится с первого загрузочного резервуара на второй загрузочный резервуар. Транспортные средства также останавливаются, или же первое транспортное средство отъезжает, в то время как второй загрузочный резервуар второго транспортного средства занимает положение, которое перед этим занимал первый загрузочный резервуар (в случае, когда загрузочные резервуары находятся на разных транспортных средствах), или, соответственно, первое транспортное средство продвигается несколько вперед с целью позиционирования также буксируемого им второго загрузочного резервуара рядом с уборочной машиной. В этих вариантах выполнения система управления может непосредственно задавать скорости уборочной машины и транспортных средств или выдавать соответствующие указания их водителям. В одном предпочтительном варианте выполнения изобретения система управления регулирует положение второго транспортного средства с загрузочным резервуаром относительно уборочной машины через устройство задания направления и соответственно скорости второго транспортного средства с целью приведения его в подходящее для перегрузки собранного урожая положение после отъезда первого транспортного средства. Однако имеется также возможность передачи соответствующих указаний водителю второго транспортного средствас помощью устройства индикации или громкоговорителя. Описание варианта осуществления Ниже приводится подробное описание примера выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображены: фиг. 1 - самоходная уборочная машина и два транспортных средства, на виде сбоку; фиг. 2 - уборочная машина и транспортные средства, которые совместно осуществляют процесс уборки и перегрузки урожая на поле, при этом собранный урожай перегружается в загрузочный резерву-3 020760 ар первого транспортного средства, на схематичном виде сверху; фиг. 3 - уборочная машина и транспортные средства из фиг. 2, на виде сзади; фиг. 4 - схема устройств определения положения обоих транспортных средств и система управления для контролирования перегрузки собранного урожая; и фиг. 5 - блок-схема программы работы системы управления. Изображенная на фиг. 1 комбинация из трех сельскохозяйственных машин включает в себя уборочную машину 10 в виде самоходного силосоуборочного комбайна, первое транспортное средство 12 в виде самоходного трактора, который с помощью дышла 14 тянет прицеп 16, который содержит загрузочный резервуар 18, и второе транспортное средство 12' в виде самоходного трактора, который с помощью дышла 14' тянет прицеп 16', который содержит загрузочный резервуар 18'. Уборочная машина 10 опирается на раму 20, которая установлена на передние приводные колеса 22 и управляемые задние колеса 24. Управление уборочной машины 10 осуществляется из кабины 26, из которой видна уборочная насадка 28 в виде насадки для срезания кукурузы, которая закреплена на сборочном канале 30 на передней стороне уборочной машины 10. Снимаемый с помощью уборочной насадки 28 с поля 34 урожай подается через расположенный в сборочном канале 30 сборочный транспортер с валиками предварительного сжатия на измельчительный барабан 36, который измельчает его на мелкие куски и передает на вентилятор 38. Между измельчительным барабаном 36 и вентилятором 38 находится устройство 42 последующего измельчения с двумя валками обработки зерен. Привод указанных приводимых в действие агрегатов уборочной машины 10 и уборочной насадки 28 осуществляется с помощью двигателя 44 внутреннего сгорания. Выдаваемый вентилятором 38 собранный урожай переходит из уборочной машины 10 в движущийся рядом загрузочный резервуар 18 посредством разгрузочного устройства 40 в виде выгрузной трубы, установленное с возможностью поворота вокруг примерно вертикальной оси с помощью первого, приводимого в действие внешней силой, исполнительного механизма 46 и наклона с помощью второго, приводимого в действие внешней силой, исполнительного механизма 46, при этом направление выброса выгрузной трубы можно изменять с помощью заслонки 50, наклон которой регулируется с помощью третьего, приводимого в действие внешней силой, исполнительного механизма 52. На фиг. 1 разгрузочное устройство 40 показано в исходном положении, в которое оно переводится,например, когда уборочная машина 10 движется по дороге. В процессе уборки урожая разгрузочное устройство 40 поднимается с помощью исполнительного механизма 48 и поворачивается с помощью исполнительного механизма 46 либо в сторону от уборочной машины 10, когда после прокашивания сбоку от уборочной машины 10 имеется достаточное место для транспортного средства 12 на скошенном участке 56 поля, либо же оно остается в направленном назад положении, согласно фиг. 1, когда в поле необходимо сначала прокосить полосу. Транспортные средства 12, 12' и прицепы 16, 16' имеют обычную конструкцию. Транспортные средства 12, 12' содержат, каждое, передние управляемые колеса 64 и задние приводные колеса 66, на которые опирается рама 64, которая несет кабину 70 водителя. На фиг. 2 уборочная машина 10 и транспортные средства 12, 12' показаны на виде сверху. Можно заметить, что уборочная машина 10 движется вдоль кромки 54 убираемого урожая, которая представляет границу между скошенным участком 56 поля 34 и еще заполненным растениями 58 кукурузы участком 60 поля 34, и убирает растения 58. Первое транспортное средство 12 едет по убранной части 56 поля параллельно уборочной машине 10 вдоль пути, на котором измельченные уборочной машиной 10 растения попадают с помощью разгрузочного устройства 40 в первый загрузочный резервуар 18. Отсюда транспортное средство 12 должно двигаться всегда параллельно рядом с уборочной машиной 10; однако, как указывалось выше, транспортное средство 12 может ехать также позади уборочной машины 10, в частности при въезде на поле, поскольку еще отсутствует убранная часть 56 поля 34, по которой может двигаться транспортное средство 12 без повреждения растущих там растений. В то время как первый загрузочный резервуар 18 первого транспортного средства 12 заполняется, второе транспортное средство 12' движется на противоположной уборочной машине 10 стороне от первого транспортного средства 12 и ожидает своей очереди. На фиг. 3 показана ситуация, изображенная на фиг. 2, на виде сзади. Уборочной машиной 10 управляет сидящий в кабине 18 водитель или же оно управляется само по себе, с помощью автоматически работающего направляющего устройства. Транспортное средство 12 также снабжено направляющим устройством, подробное описание которого будет приведено ниже, с целью облегчения соответственно автоматизации движения параллельно уборочной машине 10. Уборочная машина 10 может быть также любой другой самоходной уборочной машиной, такой как зерноуборочный комбайн или свеклоуборочная машина. Уборочная машина 10 снабжена первым устройством 72 определения положения, которое находится на крыше кабины 26. Там же расположена первая радиоантенна 74. Первое транспортное средство 12 снабжено вторым устройством 76 определения положения, которое находится на крыше кабины 70. Там же расположена вторая радиоантенна 78. Второе транспортное средство 12' снабжено вторым устройством 76 определения положения, которое находится на крыше кабины 70. Там же расположена вторая радиоантенна 78. Кроме того, уборочная машина 10 снабжена сенсорной системой 126, которая установлена на наружном конце разгрузочного устройства 40 и служит для регистрации информации от конту-4 020760 ров загрузочных резервуаров 18, 18' и/или уровня их заполнения собираемым урожаем. Альтернативно или дополнительно, сенсорная система 126' закреплена над крышей кабины 26 на телескопическом держателе 128, который в режиме уборки урожая переводится в выдвинутое положение, как показано на фиг. 1, в противном случае опущено. Сенсорные системы 126, 126' могут быть реализованы как использующий поле определения в двух измерениях, направленный на загрузочные резервуары 18, 18' ультразвуковой или лазерный дальномер, или же это может быть работающая в трех измерениях камера или две камеры, создающие стереоскопическое изображение, или же работающая в двух измерениях камера,скомбинированная с использующим поле определения дальномером. Выходной сигнал сенсорных систем 126 и/или 126' обрабатывается обрабатывающей схемой 130 (на примере фиг. 4). На фиг. 4 схематично показаны отдельные компоненты системы управления для контролирования перегрузки собранного урожая с уборочной машины 10 в загрузочные резервуары 18, 18', включающие в себя сенсорные системы 126, 126', а также устройства 72, 76 определения положения и направляющие устройства транспортных средств 12, 12' и уборочной машины 10. На борту уборочной машины 10 находится первое устройство 72 определения положения, которое содержит антенну 80 и соединенную с антенной 80 схему 82 обработки сигнала. Антенна 80 принимает сигналы от спутников системы определения положения, такой как GPS, Галилей или ГЛОНАСС, которые подаются в схему 82 обработки сигнала. На основании сигналов спутников схема 82 обработки сигнала определяет фактическое положение антенны 80. Схема 82 обработки сигнала соединена также с антенной 84 приема корректирующих данных, которая принимает излучаемые контрольными станциями в известных местах радиоволны. На основании радиоволн схема 82 обработки сигнала создает корректирующие данные для улучшения точности устройства 72 определения положения. Схема 82 обработки сигнала передает по шине 86 данные своего положения в вычислительное устройство 88. Вычислительное устройство 88 соединено через интерфейс 90 с приемопередающим устройством 92, которое, в свою очередь, соединено с радиоантенной 74. Приемопередающее устройство 92 принимает и создает радиоволны, которые принимаются и соответственно излучаются антенной 74. Аналогичным образом, на борту транспортных средств 12, 12' находится соответствующее устройство 76 определения положения, которое содержит соединенную с антенной 94 схему 96 обработки сигнала. Антенна 94 принимает сигналы спутников той же системы определения положения, что и антенна 80, которые подаются в схему 96 обработки сигнала. На основании сигналов спутников схема 96 обработки сигнала определяет фактическое положение антенны 94. Схема 96 обработки сигнала дополнительно соединена с антенной 98 приема корректирующих данных, которая принимает излучаемые контрольными станциями в известных местах расположения радиоволны. На основании радиоволн схема 96 обработки сигнала создает корректирующие данные для улучшения точности устройства 76 определения положения. Схема 96 обработки сигнала передает через шину 100 данные своего положения в вычислительное устройство 102. Вычислительное устройство 102 соединено через шину 104 с приемопередающим устройством 106, которое, в свою очередь, соединено с радиоантенной 78. Приемопередающее устройство 106 принимает и передает радиоволны, которые принимаются и соответственно излучаются антенной 78. С помощью приемопередающих устройств 90, 106 и радиоантенн 74, 78 можно передавать данные из вычислительного устройства 88 в вычислительное устройство 102 и обратно. Соединение между радиоантеннами 74, 78 может быть непосредственным, например, в разрешенном радиодиапазоне, таком как диапазон для индивидуальной связи или подобном, или через одну или несколько релейных станций,например, когда приемопередающие устройства 90, 106 и радиоантенны 74, 78 работают в соответствии со стандартом GSM или другим подходящим стандартом для мобильных телефонов. Вычислительное устройство 102 соединено с направляющим устройством 108, которое управляет углом поворота передних управляемых колес 64. Кроме того, вычислительное устройство 102 передает сигналы о скорости в устройство 110 задания скорости, которое с помощью изменения скорости вращения двигателя транспортного средства 12, 12' и/или передаточного отношения коробки передач контролирует скорость транспортного средства 12, 12'. Кроме того, вычислительное устройство 102 соединено с постоянной памятью 120. На борту уборочной машины 10 вычислительное устройство 88 соединено с контролирующим блоком 112, который вместе с управляемыми им исполнительными механизмами и соединенными с ним датчиками образует систему управления для контролирования перегрузки собираемого урожая из уборочной машины 10 в загрузочный резервуар 18 транспортного средства 12. Контролирующий блок 112 соединен с направляющим устройством 114, которое управляет углом поворота задних управляющих колес 24. Кроме того, контролирующий блок 112 передает сигналы о скорости в устройство 116 задания скорости, которое с помощью изменения передаточного отношения коробки передач контролируют скорость транспортного средства 12. Кроме того, контролирующий блок 112 соединен с датчиком 118 расхода, который измеряет расстояние между валиками предварительного сжатия в сборочном канале, с датчиком для измерения положения установленных на вершине прореживателя уборочной насадки 28 скоб-копир 62, постоянной памятью 112, обрабатывающей схемой 130 и исполнительными механизмами 46, 48 и 50. На фиг. 5 показана блок-схема, по которой работает контролирующий блок 112 уборочной машины 10 во время уборки урожая. После запуска на стадии 200 следует стадия 202, на которой уборочная машина 10 направляется вдоль кромки 54 собираемого урожая, в то время как контролирующий блок 112 передает направляющие сигналы в направляющее устройство 114, которое на основании устройства 72 определения положения и хранящейся в памяти карты задает планируемый для предстоящего процесса уборки путь, или же на основании сигналов скоб-копиров 62 или комбинации обоих видов сигналов. Альтернативно или дополнительно, кромка 54 собираемого урожая измеряется с помощью двух- или трехмерной камеры и системы обработки изображения или с помощью ультразвукового или лазерного дальномера и применяется для создания направляющего сигнала для направляющего устройства 114. Путь уборочной машины 10 не должен обязательно проходить по прямой, а может также содержать кривые, в зависимости от формы поля. Кроме того, предусмотрены процессы разворота на краю поля. Скорость движения уборочной машины 10 может задаваться водителем, или же контролирующий блок 112 применяет сигналы о пропускной способности датчика 118 пропускной способности для управления устройством 116 задания скорости так, что достигается желаемая пропускная способность уборочной машины 10. Кроме того, в стадии 204 транспортное средство 12 направляется параллельно уборочной машине 10, в то время как контролирующее устройство 112 передает через вычислительное устройство 88 и радиоантенны 74, 78 данные относительно предстоящего положения транспортного средства 12 в вычислительное устройство 102. Вычислительное устройство 102 управляет затем соответствующим образом направляющим устройством 108 и устройством 110 задания скорости, в то время как измеренное с помощью устройства 76 определения положения положение сравнивается с предстоящим положением и, в зависимости от результата сравнения, передает подходящие направляющие сигналы в направляющее устройство 108. Это сравнение и создание направляющего сигнала для направляющего устройства 108 можно осуществлять также с помощью вычислительного устройства 88 и/или контролирующего блока 112 на борту уборочной машины 10, при этом данные о положении передаются из устройства 76 определения положения транспортного средства через радиоантенны 74, 78 в уборочную машину 10, в то время как направляющие сигналы передаются в противоположном направлении обратно в транспортное средство 12. Транспортное средство 12 следует за уборочной машиной также при прохождении поворотов и при разворотах на конце поля. На стадии 206 измеряется уровень заполнения загрузочного резервуара 206, для чего служат сигналы обрабатывающей схемы 130, которые могут быть дополнены или заменены интегрированными сигналами датчика 118 пропускной способности и/или сигналами датчика 124 для измерения составных частей собираемого урожая. На стадии 208 затем запрашивается информация о достаточном заполнении загрузочного резервуара. Если он заполнен не полностью, то следует стадия 210, на которой запрашивается информация о достижении желаемого заданного уровня заполнения в загружаемом собранным урожаем месте загрузочного резервуара 18. Если уровень недостаточен, то снова следует стадия 202, в противном случае - стадия 212, на которой разгрузочное устройство 40 перенаправляется на другое место загрузочного резервуара 18. При этом можно применять определенную стратегию загрузки, описанную вDE 102008002006 А 1, полное содержание которого включается в данное описание посредством ссылки. В соответствии с этим сигналы обрабатывающего устройства 130 служат на стадии 212 для управления исполнительными механизмами 46, 48, 52. Дополнительно или альтернативно, изменяется положение транспортного средства 12 в переднем направлении и/или в боковом направлении относительно уборочной машины 10, в то время как контролирующий блок 112 через вычислительное устройство 88 и радиоантенны 74, 78 передает соответствующие данные относительно целевого положения транспортного средства 10 в вычислительное устройство 102. За счет этого можно сохранять путь собираемого урожая между выходным концом разгрузочного устройства 40 и загрузочным резервуаром 18 относительно коротким, что имеет то преимущество, что при ветре возникают меньшие потери урожая, и собранный урожай предварительно уплотняется в загрузочном резервуаре 18. После стадии 212 следует снова стадия 202. Если в стадии 208 будет установлено, что загрузочный резервуар полностью заполнен, то следует стадия 214, в которой контролирующий блок 112 запрашивает данные из обрабатывающего блока 130,имеются ли измеренные данные о втором загрузочном резервуаре 18'. Если это не так, то следует стадия 220, в которой уборочная машина 10 останавливается для ожидания второго транспортного средства 12' со вторым загрузочным резервуаром 18', и после этого снова следует стадия 214. Если имеются данные измерения второго загрузочного резервуара 18', то следует стадия 216, на которой разгрузочное устройство 40 направляется на второй загрузочный резервуар 18', посредством подходящего управления исполнительными механизмами 46, 48, 52. Затем следует стадия 218, на которой первое транспортное средство 12 отворачивает, т.е. замедляется и затем движется к пункту разгрузки собранного урожая, и как только появляется достаточное место, второе транспортное средство 12' занимает положение непосредственно рядом с уборочной машиной 10, которое перед этим занимало первое транспортное средство 12. На стадии 218 водитель транспортного средства 12 может получать от управляемого контролирующим блоком 112 через вычислительные устройства 88, 102 оптического или акустического информационного устройства (не изображено) указания на выполнение управления транспортным средством 12 и освобождения места рядом с уборочной машиной 10 для второго транспортного средства 12'. В качестве альтернативного решения направляющий блок 108 замедляет транспортное средство 12 и затем отворачивает в сторону, после чего водитель транспортного средства 12 принимает на себя управление транспортным средством 12. Второе транспортное средство 12' позиционируется рядом с уборочной машиной 10 водителем или автоматически с помощью вычислительных устройств 88, 102. Если первое транспортное средство 12 буксирует два прицепа 16, 16' с соответствующими загрузочными резервуарами 18, 18' (не изображены на фигурах), то, предпочтительно, сначала загружается передний (первый) загрузочный резервуар, а затем задний (второй) загрузочный резервуар. Кроме того, уборочная машина 10 может автоматически останавливаться между стадиями 214 и 216 для обеспечения возможности смены положений транспортных средств 12, 12', а затем снова выполнять уборку урожая. Следует отметить, что в показанном на фигурах упрощенном варианте выполнения изобретения водитель уборочной машины 10 направляет е и задает скорость, в то время как водители транспортных средств 12 соответственно направляют их и задают скорости им. Кроме того, контролирующий блок 112 контролирует лишь исполнительные механизмы 46, 48 и 52 и перенаправляет разгрузочное устройство 40 при заполненном первом загрузочном резервуаре 18 автоматически на второй загрузочный резервуар 18' на основании данных сенсорной системы 126, 126'. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система перегрузки сельскохозяйственного урожая, содержащая уборочную машину (10), два транспортных средства (12, 12') и систему управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины (10) на первое или второе транспортное средство (12,12'), содержащее загрузочный резервуар (18, 18'), при этом система управления содержит вычислительное устройство (88, 102) и контролирующий блок (112) и соединена с сенсорной системой (126, 126'), выполненной с возможностью определения уровня заполнения и/или наружных контуров загрузочного резервуара (18, 18'), и с исполнительными механизмами(46, 48, 50, 108, 110), выбранными из группы: исполнительный механизм (46), выполненный с возможностью поворота разгрузочного устройства (40), исполнительный механизм (48), выполненный с возможностью подъема разгрузочного устройства (40), направляющее устройство (108), выполненное с возможностью управления направлением движения транспортного средства (12, 12'), устройство (110) задания скорости, выполненное с возможностью контроля скорости транспортного средства (12, 12'),причем система управления выполнена с возможностью автоматического контроля и управления положением выходного конца разгрузочного устройства (40) относительно уборочной машины (10) и/или направления выброса разгрузочного устройства (40) и/или положения первого транспортного средства (12) с первым загрузочным резервуаром (18) относительно уборочной машины (10) на основе сигналов сенсорной системы (126, 126') и посредством соответствующих исполнительных механизмов(46, 48, 50, 108, 110) так, что обеспечена возможность последовательной загрузки первого загрузочного резервуара (18) собранным урожаем,сенсорная система (126, 126') дополнительно соединена с обрабатывающим устройством (130), выполненным с возможностью предоставления данных о положении второго загрузочного резервуара (18') в контролирующий блок (112) системы управления,система управления выполнена с возможностью на основании сигналов сенсорной системы (126,126') и посредством соответствующих исполнительных механизмов (46, 48, 50, 108, 110) автоматически направлять разгрузочное устройство (40) ко второму загрузочному резервуару (18') после распознавания в целом достаточного заполнения первого загрузочного резервуара (18), и система управления выполнена с возможностью определять достаточный уровень заполнения первого загрузочного резервуара (18) на основании сигналов сенсорной системы (126, 126') и/или на основании установленного на уборочной машине (10) датчика (118, 124) собранного урожая для измерения свойств собранного урожая,отличающаяся тем, что система управления выполнена с возможностью после распознавания в целом достаточного заполнения первого загрузочного резервуара (18) перепроверять сигналы сенсорного устройства (126, 126'), определяющие второй загрузочный резервуар, и останавливать уборочную машину (10) для ожидания второго транспортного средства (12') со вторым загрузочным резервуаром (18') в случае, если не происходит определения второго загрузочного резервуара. 2. Система по п.1, отличающаяся тем, что датчик (118, 124) собранного урожая выполнен с возможностью измерения пропускной способности и/или массы, и/или составных веществ, и/или сухой массы. 3. Система по п.1 или 2, отличающаяся тем, что сенсорная система (126, 126') содержит формирующий изображение датчик, в частности работающую в двух или трех измерениях камеру или развертывающий в двух измерениях дальномер. 4. Система по любому из пп.1-3, отличающаяся тем, что система управления выполнена с возмож-7 020760 ностью направления разгрузочного устройства (40) на второй загрузочный резервуар (18') во время движения уборочной машины (10). 5. Система по любому из пп.1-3, отличающаяся тем, что система управления выполнена с возможностью останова уборочной машины (10) перед перенаправлением разгрузочного устройства на второй загрузочный резервуар (18'), при этом транспортные средства (12, 12') также выполнены с возможностью останова, или второй загрузочный резервуар (18') выполнен с возможностью занимать положение, которое перед этим имел первый загрузочный резервуар (18). 6. Система по любому из пп.1-5, отличающаяся тем, что система управления выполнена с возможностью автоматического контроля положения первого или второго транспортного средства (12, 12') со вторым загрузочным резервуаром (18') относительно уборочной машины (10). 7. Система по любому из пп.1-6, отличающаяся тем, что сенсорная система (126, 126') направлена на загрузочный резервуар (18, 18') сверху. 8. Система по любому из пп.1-7, отличающаяся тем, что сенсорная система (126, 126') закреплена на внешнем конце разгрузочного устройства (40) или на отдельном держателе (128) на уборочной машине(10). 9. Способ перегрузки собранного сельскохозяйственного урожая с уборочной машины (10) на транспортное средство (12, 12'), содержащее загрузочный резервуар (18, 18'), при котором система управления на основании сигналов, измеряющих уровень заполнения и/или наружный контур загрузочного резервуара сенсорной системы (126, 126'), автоматически контролирует положение выходного конца разгрузочного устройства (40) относительно уборочной машины (10), и/или направление выброса разгрузочного устройства (40), и/или положение транспортного средства (12, 12') с загрузочным резервуаром (18, 18') относительно уборочной машины (10) таким образом, что загрузочный резервуар (18, 18') последовательно загружается собранным урожаем; сенсорная система (126, 126') дополнительно определяет положение второго загрузочного резервуара (18'), при этом система управления на основании сигналов сенсорного устройства (126, 126') автоматически направляет разгрузочное устройство (40) ко второму загрузочному резервуару (18') после распознавания в целом достаточного заполнения первого загрузочного резервуара (18); система управления определяет достаточный уровень заполнения первого загрузочного резервуара(18) на основании сигналов сенсорной системы (126, 126') и/или на основании установленного на уборочной машине (10) датчика (118, 124) собранного урожая для измерения свойств собранного урожая,отличающийся тем, что система управления после распознавания в целом достаточного заполнения первого загрузочного резервуара (18) перепроверяет сигналы сенсорного устройства (126, 126'), определяющие второй загрузочный резервуар, и в случае, если не происходит определения второго загрузочного резервуара, уборочная машина (10) останавливается для ожидания второго транспортного средства(12') со вторым загрузочным резервуаром (18').
МПК / Метки
МПК: A01D 43/073
Метки: содержащее, загрузочный, сельскохозяйственного, машины, урожая, система, управления, контролирования, собранного, резервуар, средство, перегрузки, транспортное, уборочной
Код ссылки
<a href="https://eas.patents.su/12-20760-sistema-upravleniya-dlya-kontrolirovaniya-peregruzki-sobrannogo-selskohozyajjstvennogo-urozhaya-s-uborochnojj-mashiny-na-soderzhashhee-zagruzochnyjj-rezervuar-transportnoe-sredstvo.html" rel="bookmark" title="База патентов Евразийского Союза">Система управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины на содержащее загрузочный резервуар транспортное средство</a>
Приводная система для уборочной машины
Номер патента: 16881
Опубликовано: 30.08.2012
Авторы: Борер Штефан, Вайс Хельмут
МПК: A01D 41/02, A01D 69/03
Метки: уборочной, приводная, система, машины
Формула / Реферат:
1. Приводная система для уборочной машины (10), содержащаядвигатель (32) внутреннего сгорания с выходным валом (36),приспособление для обработки собираемого урожая, которое предназначено для соединения через содержащую сцепление (42) трансмиссию с выходным валом (36) двигателя (32) внутреннего сгорания,гидронасос (66), соединенный с трансмиссией со стороны сцепления (42), к которому также подсоединено приспособление для обработки собираемого...
Приводная система для уборочной машины
Номер патента: 15771
Опубликовано: 30.12.2011
Авторы: Борер Штефан, Вайссиг Йорг
МПК: A01D 69/06, F16H 41/00, F16H 39/02...
Метки: приводная, уборочной, система, машины
Формула / Реферат:
1. Приводная система для уборочной машины (10), содержащаядвигатель (36, 38) внутреннего сгорания,устройство для обработки убираемой культуры, выполненное с возможностью приводного механического соединения через трансмиссию с двигателем (36, 38) внутреннего сгорания, причем трансмиссия содержит выключаемое сцепление (78), приводимое в действие с помощью исполнительного элемента (122),первый гидронасос (110), соединенный с трансмиссией на входной...
Система привода подающего транспортера уборочной машины
Номер патента: 18822
Опубликовано: 30.10.2013
Авторы: Россбах Конрад, Борер Штефан
МПК: F16H 61/42, A01F 29/16
Метки: транспортера, подающего, привода, уборочной, машины, система
Формула / Реферат:
1. Система привода подающего транспортера (22) уборочной машины (10), содержащаярегулируемый гидронасос (66), скорость и направление потока которого регулируются посредством первого исполнительного элемента (76), управляемого первым клапаном (90),гидромотор (68), соединенный с гидронасосом (66) с возможностью пропускания текучей рабочей среды и находящийся в приводной связи с подающим транспортером (22), исистему (70) управления, соединенную с...
Система управления сельскохозяйственного или промышленного транспортного средства и способ эксплуатации системы управления
Номер патента: 7823
Опубликовано: 27.02.2007
Авторы: Тарасинский Николай, Райнардс Марко, Кнеер Бернд, Зоботцик Йоахим
МПК: B60K 6/04, B60K 31/00, B60K 17/356...
Метки: промышленного, система, средства, системы, сельскохозяйственного, управления, эксплуатации, способ, транспортного
Формула / Реферат:
1. Система управления для сельскохозяйственного или промышленного транспортного средства, в частности трактора, причем для каждой полуоси моста, предпочтительно переднего моста (20), транспортного средства (10) предусмотрен электрический привод (22, 24), при помощи которого приводится по меньшей мере одно соединенное с соответствующей полуосью колесо (26), причем электропривод (22, 24) управляется таким образом, что от электропривода (22, 24)...
Система перегрузки сельскохозяйственной продукции и способ перегрузки
Номер патента: 19841
Опубликовано: 30.06.2014
Автор: Корманн Георг
МПК: A01D 43/08
Метки: продукции, сельскохозяйственной, система, способ, перегрузки
Формула / Реферат:
1. Система перегрузки сельскохозяйственной продукции, содержащая уборочную машину (10), транспортное средство (12) с грузовым контейнером (18), а также управляющее устройство для контроля за перегрузкой сельскохозяйственной продукции с уборочной машины (10) на грузовой контейнер (18) транспортного средства (12), причем управляющее устройство выполнено с возможностью приведения в действие для контроля положения выпускного конца и/или направления...
Предыдущий патент: Способ переработки никельсодержащего сырья
Следующий патент: Крышка-контейнер для автономного хранения и смешивания компонентов
Случайный патент: Усовершенствованная конструкция гидравлической опоры для опалубки