Шариковый исполнительный механизм

Формула / Реферат
1. Исполнительный механизм (10), содержащий
корпус (12), определяющий геометрическую ось поступательного перемещения (19),
стержень регулирования (18), выполненный с возможностью поступательного перемещения относительно корпуса (12) в направлении, параллельном геометрической оси поступательного перемещения (19) между фиксированным положением регулирования и нефиксированным положением регулирования, и содержащий поверхность (46) качения,
боёк (14), выполненный с возможностью поступательного перемещения относительно корпуса в направлении, параллельном геометрической оси поступательного перемещения (19) между рабочим положением и свободным положением, и содержащий опорную втулку (40),
средство привода (16) бойка (14), действующее совместно с бойком (14) таким образом, что когда боёк (14) находится в своём рабочем положении, то средство привода (16) бойка смещает боёк для возврата в свободное положение,
совокупность n стопорных шариков (20), при этом n является целым числом, большим или равным трём, каждый стопорный шарик (20) выполнен с возможностью перемещения между фиксированным положением и свободным положением, причём каждый стопорный шарик (20) в фиксированном положении прижат к опорной втулке (40) бойка, при этом каждый стопорный шарик имеет центр, совокупность n шариков (22) регулирования, при этом каждый шарик регулирования имеет центр, причём исполнительный механизм выполнен таким образом, что когда боёк (14) находится в рабочем положении и стержень (18) находится в фиксированном положении управления, то центры стопорных шариков (20) находятся в первой геометрической плоскости (II-II, 60), перпендикулярной геометрической оси поступательного перемещения (19), центры шариков (22) регулирования находятся во второй геометрической плоскости (II-II, 62), перпендикулярной геометрической оси поступательного перемещения (19),
отличающийся тем, что исполнительный механизм выполнен таким образом, что когда боёк (14) находится в рабочем положении и стержень (18) находится в фиксированном положении регулирования, то каждый шарик (22) регулирования упирается в поверхность (40) качения стержня и в два соответствующих стопорных шарика из числа совокупности стопорных шариков (20), и центр каждого шарика (20) регулирования находится между стержнем (18) и третьей геометрической плоскостью, параллельной геометрической оси поступательного перемещения и проходящей через центр каждого из указанных двух соответствующих стопорных шариков.
2. Исполнительный механизм по п.1, отличающийся тем, что средство (16) привода бойка (14) содержит пружину (16) накопления энергии, действующую совместно с корпусом (12) и бойком (14), таким образом, что когда боёк (14) находится в своём рабочем положении, то пружина (16) накопления энергии находится в рабочем состоянии и смещает боёк (14) для возврата в свободное положение.
3. Исполнительный механизм по п.2, отличающийся тем, что пружина (16) накопления энергии является спиральной пружиной, соосной с геометрической осью (19).
4. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что стержень (18) установлен по геометрической оси поступательного перемещения (19), опорная втулка (40) бойка образует поверхность поворота вокруг геометрической оси поступательного перемещения (19), центры стопорных шариков образуют n вершин многоугольника (56) с n сторонами, с центром на геометрической оси поступательного перемещения (19), и центры шариков регулирования образуют n вершин многоугольника (58) с n сторонами, с центром на геометрической оси поступательного перемещения (19).
5. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что также содержит
средство возврата (110, 210) для возврата стержня в фиксированное положение регулирования;
средство привода (106, 206) для привода стержня в нефиксированное положение регулирования.
6. Исполнительный механизм по п.5, отличающийся тем, что также содержит выполненный с возможностью перемещения узел из ферромагнитного материала, который осуществляет скользящее поступательное перемещение в закреплении со стержнем, при этом средство привода стержня (106, 206) содержит электромагнитную обмотку (106, 206) возбуждения для привода выполненного с возможностью перемещения узла.
7. Исполнительный механизм по п.6, отличающийся тем, что выполненный с возможностью перемещения узел расположен в полости (102) корпуса.
8. Исполнительный механизм по любому одному из пп.6 или 7, отличающийся тем, что выполненный с возможностью перемещения узел сформирован частью стержня (18).
9. Исполнительный механизм по любому одному из пп.6-8, отличающийся тем, что обмотка (106, 206) опирается на корпус.
10. Исполнительный механизм по любому одному из пп.6-9, отличающийся тем, что средство возврата стержня содержит постоянный магнит (210), втягивающий выполненный с возможностью перемещения узел.
11. Исполнительный механизм по любому одному из пп.6-10, отличающийся тем, что средство возврата стержня содержит пружину возврата (110).
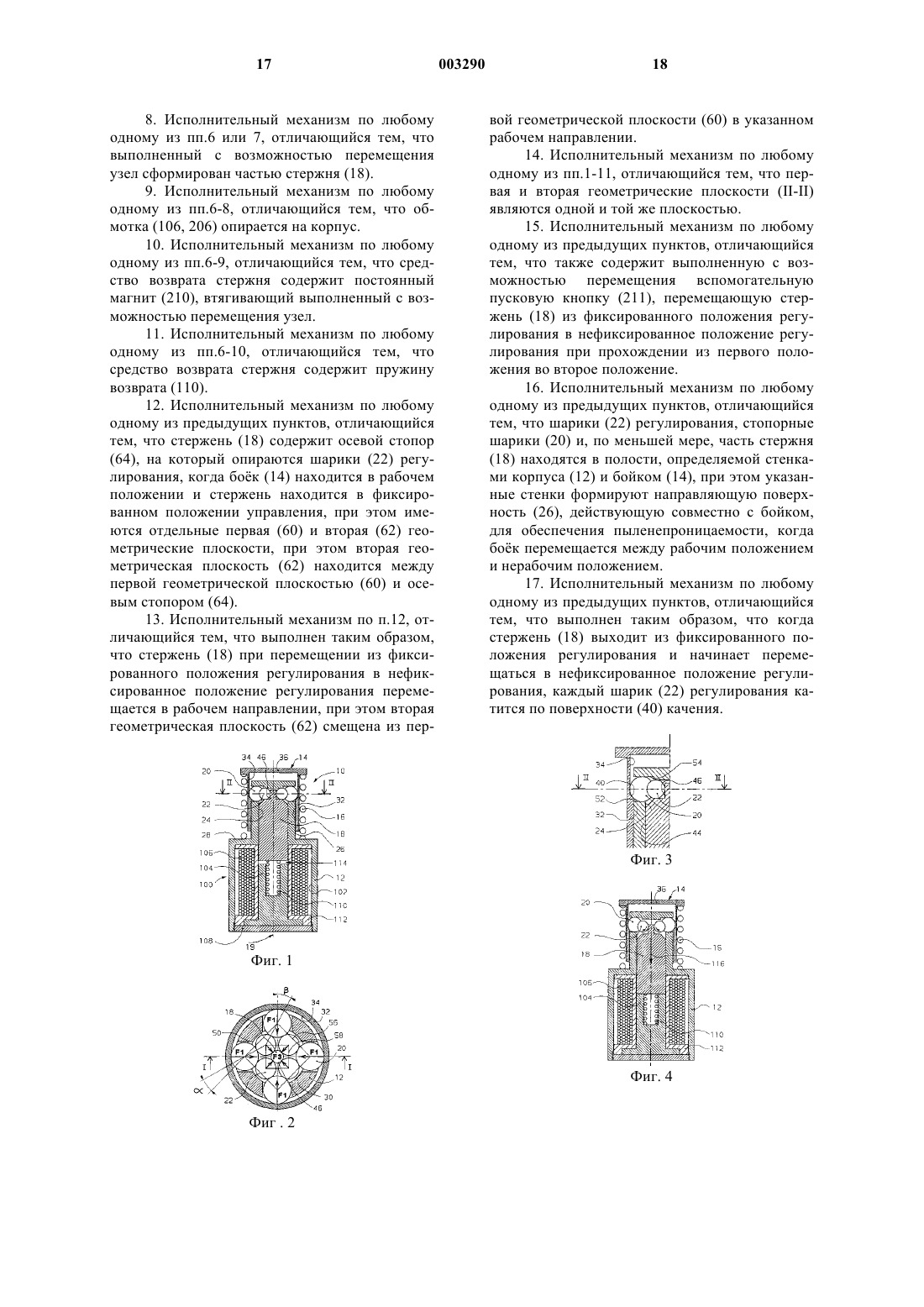
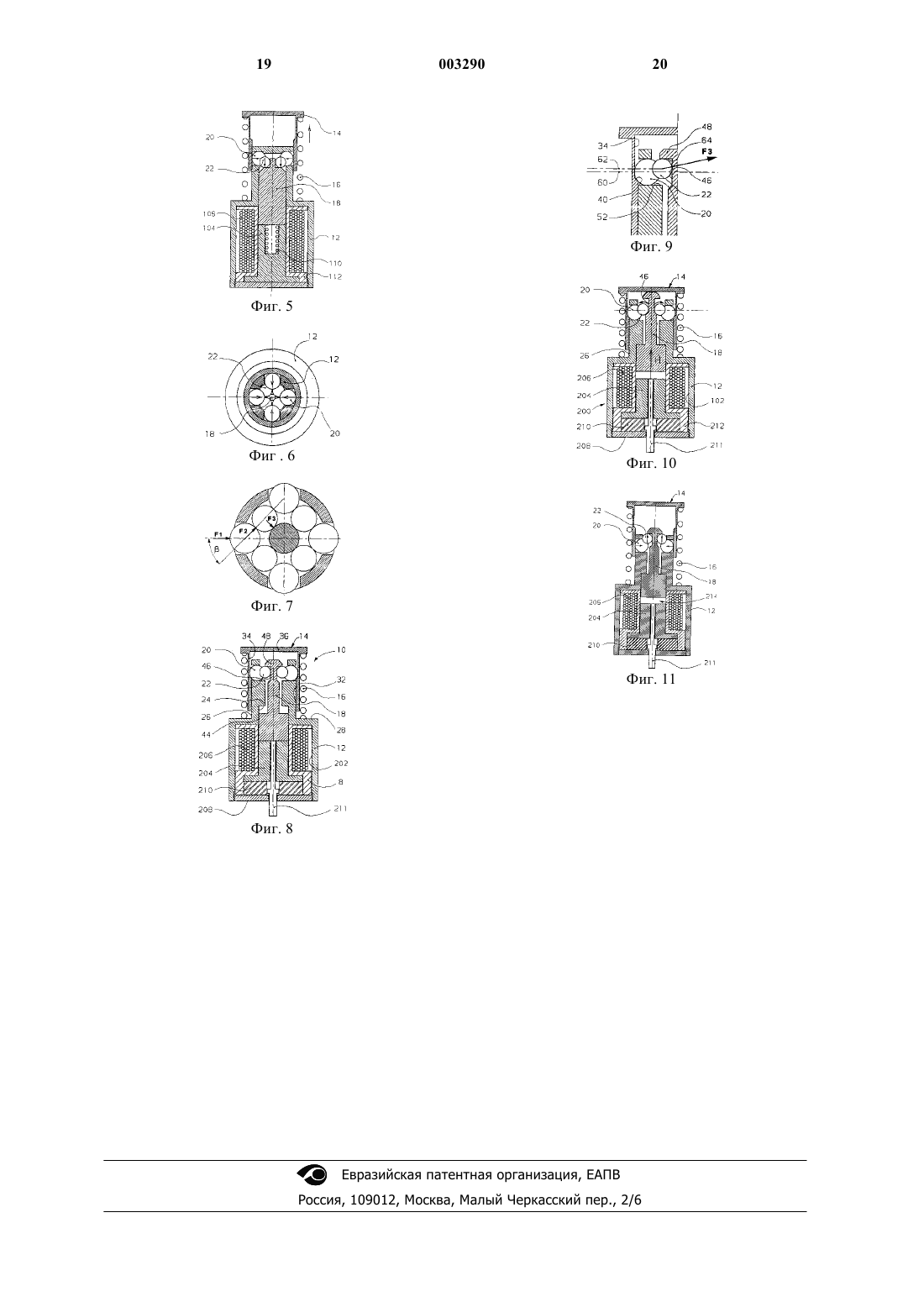
12. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что стержень (18) содержит осевой стопор (64), на который опираются шарики (22) регулирования, когда боёк (14) находится в рабочем положении и стержень находится в фиксированном положении управления, при этом имеются отдельные первая (60) и вторая (62) геометрические плоскости, при этом вторая геометрическая плоскость (62) находится между первой геометрической плоскостью (60) и осевым стопором (64).
13. Исполнительный механизм по п.12, отличающийся тем, что выполнен таким образом, что стержень (18) при перемещении из фиксированного положения регулирования в нефиксированное положение регулирования перемещается в рабочем направлении, при этом вторая геометрическая плоскость (62) смещена из первой геометрической плоскости (60) в указанном рабочем направлении.
14. Исполнительный механизм по любому одному из пп.1-11, отличающийся тем, что первая и вторая геометрические плоскости (II-II) являются одной и той же плоскостью.
15. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что также содержит выполненную с возможностью перемещения вспомогательную пусковую кнопку (211), перемещающую стержень (18) из фиксированного положения регулирования в нефиксированное положение регулирования при прохождении из первого положения во второе положение.
16. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что шарики (22) регулирования, стопорные шарики (20) и, по меньшей мере, часть стержня (18) находятся в полости, определяемой стенками корпуса (12) и бойком (14), при этом указанные стенки формируют направляющую поверхность (26), действующую совместно с бойком, для обеспечения пыленепроницаемости, когда боёк перемещается между рабочим положением и нерабочим положением.
17. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что выполнен таким образом, что когда стержень (18) выходит из фиксированного положения регулирования и начинает перемещаться в нефиксированное положение регулирования, каждый шарик (22) регулирования катится по поверхности (40) качения.

Текст
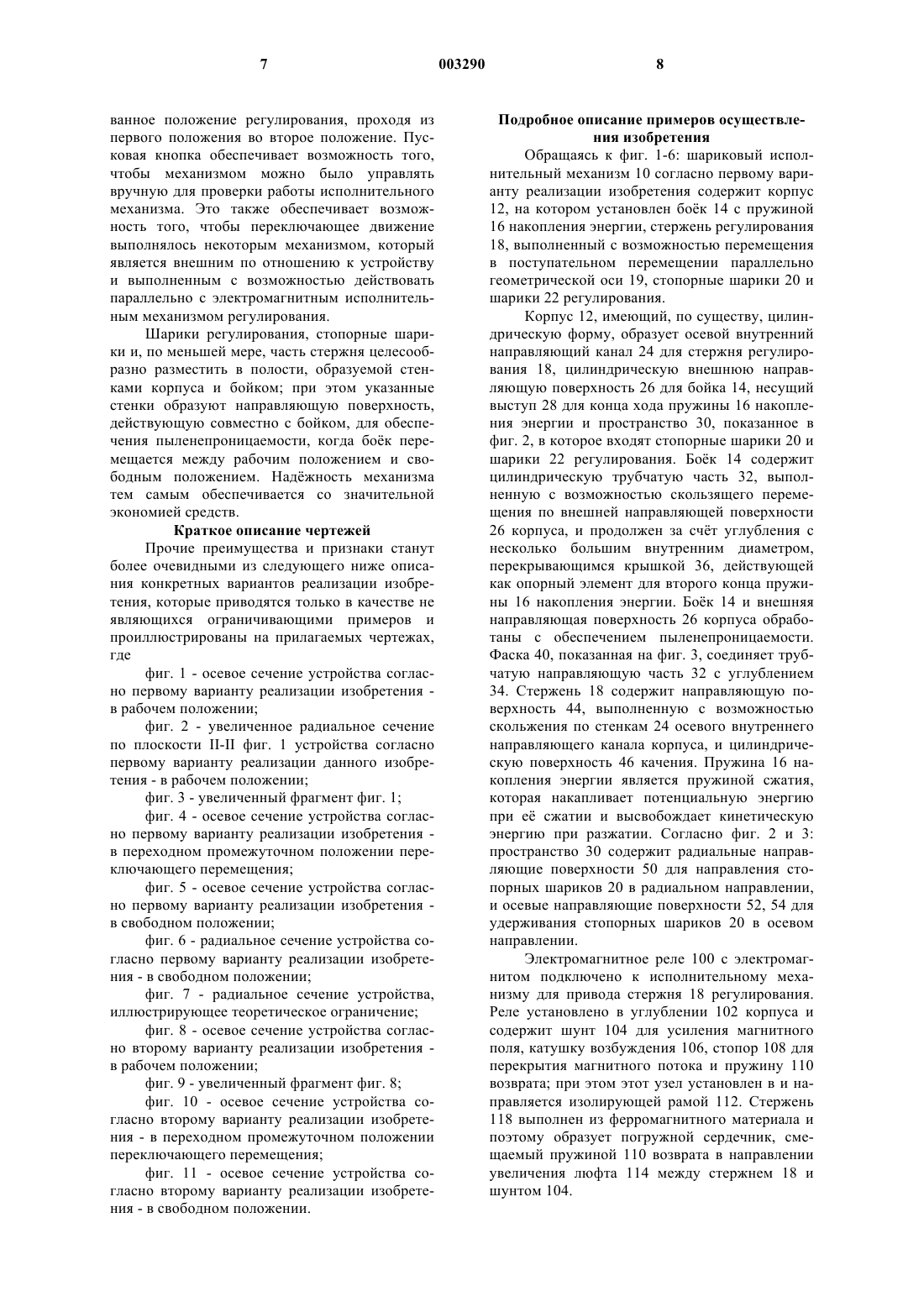
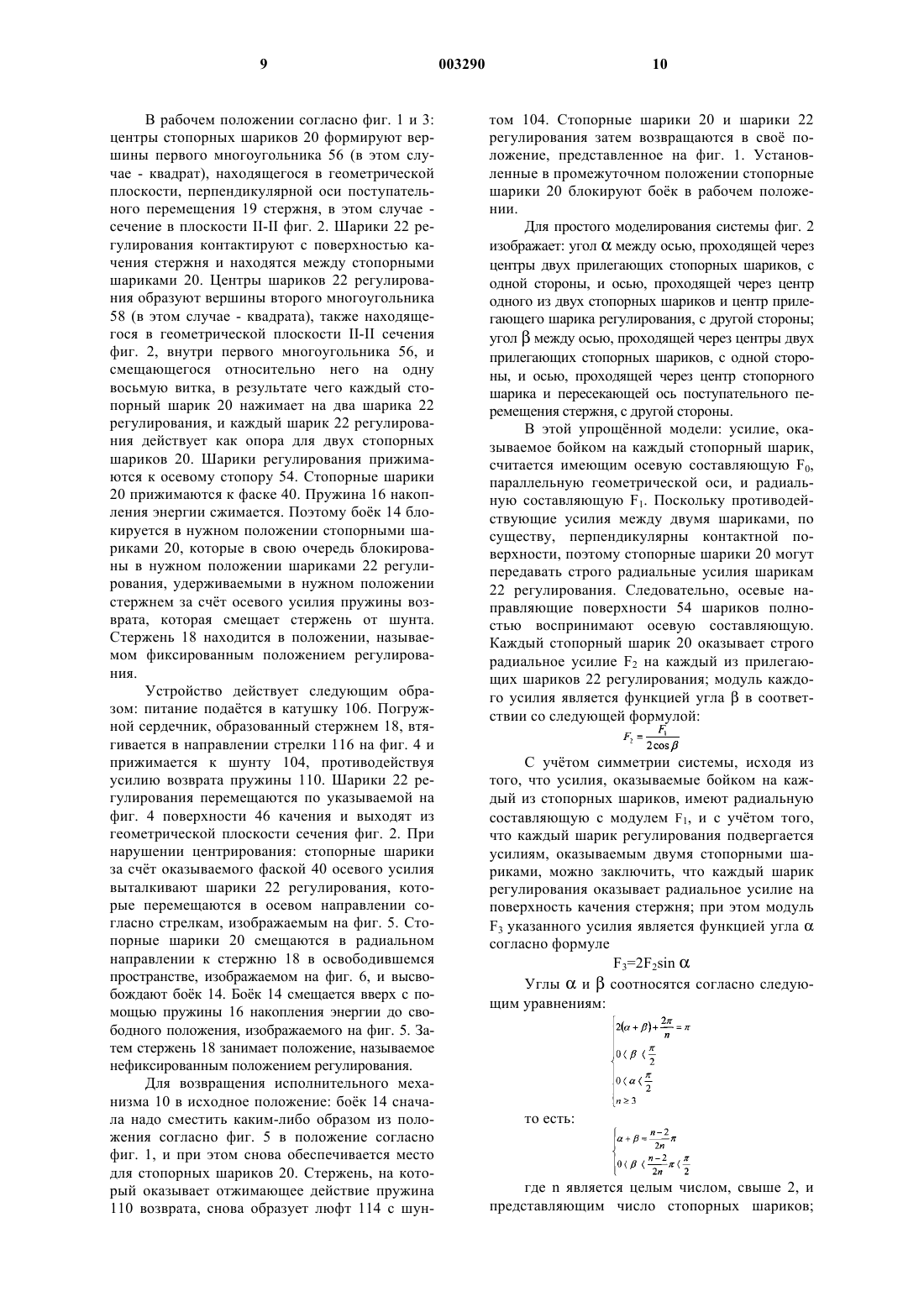
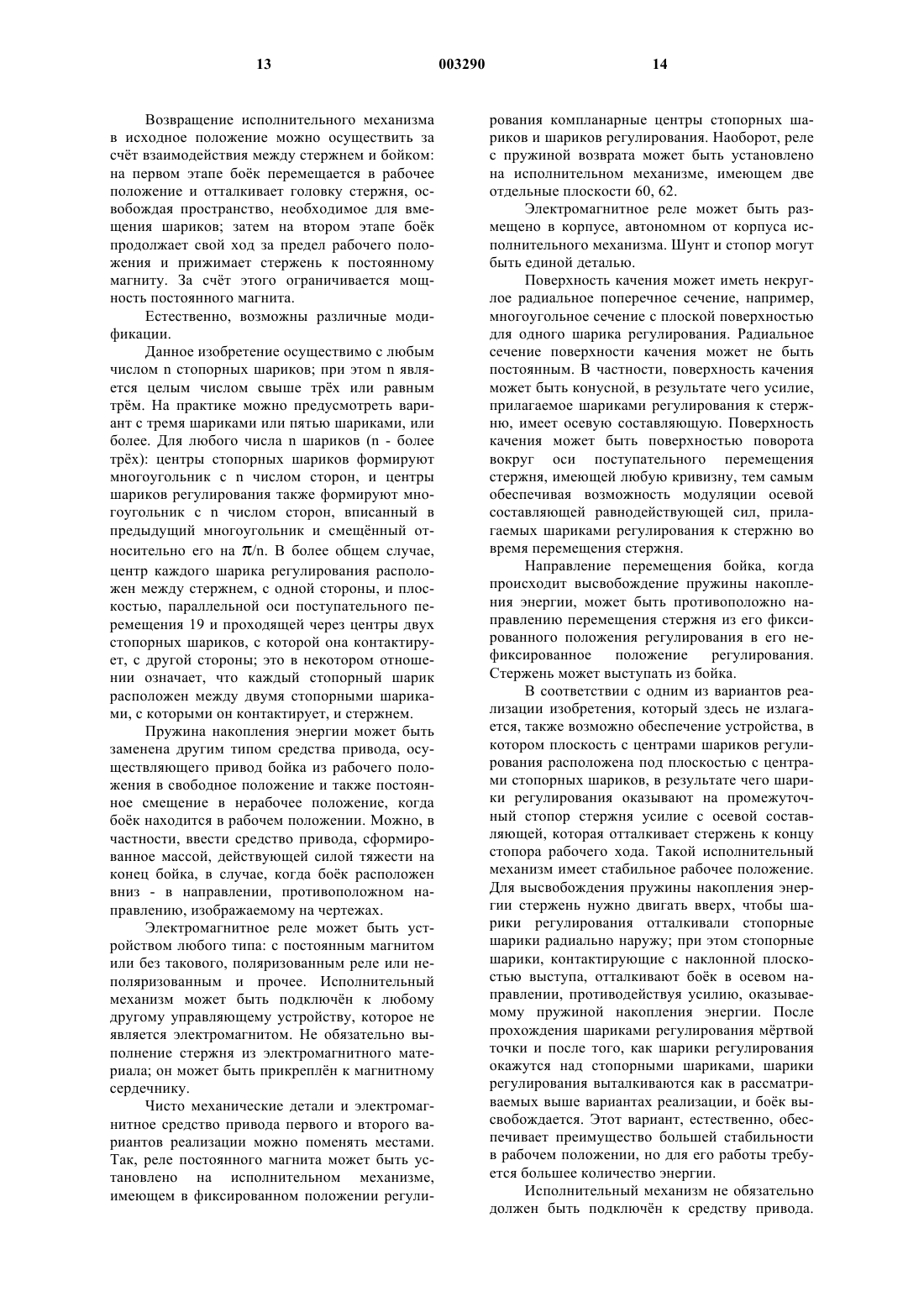
1 Область техники Изобретение относится к высокоэффективному и малогабаритному шариковому исполнительному механизму, выполненному, в частности, для управления размыкающим и замыкающим механизмом электрического распредустройства, в частности, для управления силовым автоматическим выключателем. Уровень техники Документ DE 2,340,450 описывает фиксирующее устройство со стопорными шариками для фиксирования электрического переключателя, содержащее фиксирующую задвижку, выполненную с возможностью поступательного перемещения в корпусе, и регулирующий узел,сформированный стержнем регулирования с осевым перемещением и установленным перпендикулярно оси поступательного перемещения задвижки, и имеющим опорную пластину для двух шариков. В фиксированном положении: первый из двух шариков опирается на одну сторону плоского конца задвижки и на другую сторону на стержне. Поверхность плоского конца задвижки параллельна контактной поверхности стержня, в результате чего задвижка передат стержню только радиальные усилия. Эти усилия воспринимаются вторым шариком, расположенным между стержнем и корпусом. Конец стержня также имеет в нижней части фаску,образующую наклонную плоскость. Для высвобождения задвижки нужно просто сдвинуть стержень, в результате чего первый шарик перекатывается в контакт со стержнем, во-первых, и с плоским концом задвижки, во-вторых, до упора в наклонную плоскость задвижки. В этот момент шарик выталкивается и высвобождает задвижку. Это устройство имеет относительно хорошие рабочие показатели, но чрезвычайно чувствительно к допускам размера и износу деталей. Усилия, прилагаемые к стержню двумя шариками, являются значительными и оставляют след на задвижке. Помимо этого, если диаметр второго шарика не соответствует точно расстоянию между стержнем и корпусом, то радиальные усилия, передаваемые стержню первым шариком в фиксированном положении,не будут полностью передаваться второму шарику и будут деформировать стержень. Документ DE 1,131,304 описывает фиксирующее устройство защлки высоковольтного переключателя, содержащее фиксирующую задвижку, скользящую в корпусе и опирающуюся на ряд из четырх роликов. В фиксированном положении четыре ролика центрированы на оси поступательного перемещения задвижки: самый дальний от задвижки ролик опирается на стенку корпуса. Посредством пусковой кнопки промежуточные ролики во втором и третьем положениях будут разцентрированы, но эти промежуточные ролики смещаются в сцентрированное положение пружинами возврата. Когда центрирование четырх роликов сохраняется, то уси 003290 2 лие, оказываемое задвижкой, передатся полностью от ролика к ролику до корпуса. Действие пусковой кнопки обусловливает качение двух промежуточных роликов в их разцентрированное положение в противодействие смещающему усилию пружин возврата. При разцентрировании роликов задвижка высвобождается. Способность удерживать промежуточные ролики на одной прямой с задвижкой зависит от калибровки пружин возврата. Когда начинается разцентрирование промежуточных роликов, значительная часть усилия, оказываемого задвижкой,фактически передатся пружинам возврата. Когда устройство подвергается ударам или колебаниям, разцентрирующим валики, пружины возврата подвергаются сильным напряжениям со стороны усилий, оказываемых задвижкой. Если нужно снизить чувствительность устройства к ударам, то необходимо увеличить жсткость пружин возврата, чтобы увеличить усилие, прилагаемое к стержню, для разцентрирования устройства. Ход задвижки при этом ограничен. В документе FR 1,060,856 описывается исполнительный механизм, содержащий корпус,определяющий геометрическую ось поступательного перемещения; стержень регулирования, выполненный с возможностью поступательного перемещения относительно корпуса в направлении, параллельном геометрической оси поступательного перемещения между фиксированным положением регулирования и нефиксированным положением регулирования, и содержащий поверхность качения; бок, выполненный с возможностью поступательного перемещения относительно корпуса в направлении,параллельном геометрической оси поступательного перемещения между рабочим и свободным положениями, и содержащий опорную втулку; при этом средство привода бойка действует совместно с бойком таким образом, что, когда бок находится в рабочем положении, то средство привода бойка смещает бок для возврата в свободное положение; совокупность из четырх стопорных шариков, каждый стопорный шарик выполнен с возможностью перемещения между фиксированным положением и свободным положением, причм каждый стопорный шарик в фиксированном положении прижат к указанной опорной втулке бойка, при этом каждый стопорный шарик имеет центр; совокупность из четырх шариков регулирования, каждый шарик регулирования имеет центр; при этом исполнительный механизм выполнен таким образом,когда бок находится в рабочем положении и стержень находится в фиксированном положении регулирования - центры стопорных шариков и шариков регулирования находятся в одной и той же геометрической плоскости, перпендикулярной геометрической оси поступательного перемещения. В этом устройстве не предусмат 3 ривается уменьшение усилий между стопорными шариками и шариками регулирования. Документ DE 1,006,044 описывает фиксирующую систему, содержащую один шарик регулирования и два стопорных шарика - для обеспечения возможности уменьшения усилий. Фиксирующий механизм аналогичного типа с одним шариком регулирования и двумя стопорными шариками, описывается в документе FR 2,417,177. Эти механизмы ограничены по мощности небольшим числом шариков регулирования и небольшим числом стопорных шариков. Помимо этого два стопорных шарика необходимы для одного шарика регулирования. Сущность изобретения Задача данного изобретения заключается в устранении недостатков известного уровня техники за счт высокоэффективного шарикового исполнительного механизма, для которого требуется очень низкая энергия срабатывания для выделения значительной механической энергии. Другая задача изобретения заключается в уменьшении габаритов исполнительного механизма и ограничении числа шариков для данной накапливаемой механической энергии. Ещ одна задача - увеличить ход подвижного средства,доставляющего накопленную кинетическую энергию. Ещ одна задача - сделать выполнение исполнительного механизма относительно нечувствительным к изменениям размеров, связанным с производственными допусками или износом. Ещ одна задача - повысить скорость исполнительного механизма. Ещ одна общая задача - снизить себестоимость исполнительного механизма. В соответствии с данным изобретением указанные задачи решают с помощью исполнительного механизма, содержащего- корпус, определяющий геометрическую ось поступательного перемещения; стержень регулирования, выполненный с возможностью поступательного перемещения относительно корпуса в направлении, параллельном геометрической оси поступательного перемещения между фиксированным положением регулирования и нефиксированным положением регулирования, и содержащий поверхность качения, бок, выполненный с возможностью поступательного перемещения относительно корпуса в направлении, параллельном геометрической оси поступательного перемещения между рабочим положением и свободным положением, и содержащий опорную втулку;- средство привода бойка, действующее совместно с бойком таким образом, что, когда бок находится в рабочем положении, средство привода бойка смещает бок для возврата в свободное положение;- совокупность n стопорных шариков, при этом n является целым числом, большим или равным трм, при этом каждый стопорный ша 003290 4 рик выполнен с возможностью перемещения между фиксированным положением и свободным положением, при этом каждый стопорный шарик в фиксированном положении прижат к указанной опорной втулке бойка, при этом каждый стопорный шарик имеет центр,- совокупность n шариков регулирования,при этом каждый шарик регулирования имеет центр, при этом исполнительный механизм выполнен таким образом, что, когда бок находится в рабочем положении и стержень находится в фиксированном положении регулирования, тогда центры стопорных шариков расположены в первой геометрической плоскости, перпендикулярной геометрической оси поступательного перемещения, центры шариков регулирования находятся во второй геометрической плоскости,перпендикулярной геометрической оси поступательного перемещения; при этом каждый шарик регулирования упирается в поверхность качения стержня и в два соответствующих стопорных шарика, относящихся к совокупности стопорных шариков, и центр каждого шарика регулирования находится между стержнем и третьей геометрической плоскостью, параллельной геометрической оси поступательного перемещения и проходящей через центр каждого из указанных двух соответствующих стопорных шариков. Размещение шарика регулирования между двумя стопорными шариками обеспечивает распределение усилий таким образом, что усилия,прилагаемые шариками регулирования к стержню, имеют составляющую, перпендикулярную оси поступательного перемещения стержня,которая ниже составляющей в плоскости, перпендикулярной оси поступательного перемещения стержня усилий, прилагаемых бойком к стопорным шарикам. Другими словами, часть прилагаемых бойком усилий не передатся стержню. Когда стержень выходит из фиксированного положения регулирования и начинает перемещаться в нефиксированное положение регулирования, каждый шарик регулирования катится по поверхности качения. Рабочая энергия, необходимая для перемещения стержня между его фиксированным положением регулирования и его нефиксированным положением регулирования, поэтому низкая. Это дат возможность снизить потребление электроэнергии и габариты средства привода стержня. При этом, формируемая шариками подвижная масса относительно невелика и е перемещение имеет очень небольшую амплитуду; с одной стороны - высвобождение бойка вследствие перемещения стержня очень быстрое, что обеспечивает хорошее время срабатывания, и, с другой стороны, накопленная в пружине потенциальная энергия почти полностью передатся бойку, и это обеспечивает механизму очень хорошую эффективность. 5 При этом перемещение стержня перпендикулярно первой и второй плоскостям, в результате чего шарики действуют за счт качения по стержню, а не скольжения по стержню, тем самым обеспечивая минимальный износ. Средство привода бойка предпочтительно содержит пружину накопления энергии, действующую совместно с корпусом и с бойком, в результате чего, когда бок находится в свом рабочем положении, тогда пружина накопления энергии находится в рабочем состоянии и смещает бок для возврата в свободное положение. Требуемая для привода стержня энергия очень невелика для значительной потенциальной энергии, накапливаемой в пружине накопления энергии. Выполненный таким образом исполнительный механизм образует функциональный узел, который не требует значительной отладки при его установке. Пружина накопления энергии предпочтительно является спиральной пружиной, соосной с геометрической осью. Стержень установлен по геометрической оси поступательного перемещения, опорная втулка бойка формирует поверхность поворота вокруг геометрической оси поступательного перемещения, центры стопорных шариков формируют n вершин многоугольника с n сторонами, с центром на геометрической оси поступательного перемещения, и центры шариков регулирования формируют n пиков многоугольника с n сторонами, с центром на геометрической оси поступательного перемещения. Шарики регулирования таким образом автоматически центрируются совместным действием стопорных шариков, что делает устройство относительно нечувствительным к изменениям размеров и к износу. Устройство предпочтительно содержит также средство возврата для возврата стержня в фиксированное положение регулирования, и средство привода для привода стержня в нефиксированное положение регулирования. За счт уменьшения фиксирующих усилий, получаемых благодаря взаимному размещению шариков регулирования и стопорных шариков, усилие, которое должно создаваться средством возврата стержня, является относительно небольшим, в результате чего средство привода стержня должно обеспечивать только небольшое количество энергии для противодействия средству возврата стержня и для привода стержня в нефиксированное положение. В соответствии с предпочтительным вариантом реализации: выполненный с возможностью перемещения узел из ферромагнитного материала скользящим движением последовательно перемещается в закреплении со стержнем. Средство привода стержня содержит электромагнитную обмотку возбуждения для привода указанного, выполненного с возможностью перемещения узла. 6 Выполненный с возможностью перемещения узел целесообразно размещают в полости корпуса. Обмотка опирается на корпус. За счт этого уменьшаются габариты. Тем самым повышается наджность устройства. Получаемый таким образом узел является особо компактным. Подвижный узел целесообразно формируют частью стержня. Поэтому количество деталей сокращается. В соответствии с одним вариантом реализации средство возврата стержня содержит постоянный магнит, притягивающий выполненный с возможностью перемещения узел. Наличие только постоянного магнита достаточно для того, чтобы удерживать стержень в фиксированном положении и, возможно, чтобы устанавливать стержень либо полностью, либо частично, в исходное положение. Это обеспечивает возможность значительного снижения энергопотребления исполнительного механизма регулирования. Либо или также, средство возврата стержня содержит пружину возврата. В соответствии с одним из вариантов реализации: стержень содержит осевой стопор, на который опираются шарики регулирования, когда бок находится в рабочем положении и стержень находится в фиксированном положении регулирования; при этом первая и вторая геометрические плоскости являются отдельными, вторая геометрическая плоскость находится между первой геометрической плоскостью и осевым стопором. При такой компоновке механизм поляризуют механически в нефиксированное положение, так как равнодействующая сил,прилагаемых шариками регулирования к стержню, содержит осевую составляющую. Устранение люфта между шариками даже более эффективно. При перемещении стержня из фиксированного положения регулирования в нефиксированное положение регулирования он предпочтительно перемещается в рабочем направлении; при этом вторая геометрическая плоскость смещается из первой геометрической плоскости в указанном рабочем положении. Равнодействующая сил, прилагаемых шариками регулирования к стержню, поэтому имеет осевую составляющую, двигающую стержень в его нефиксированное положение регулирования. Поэтому переключающее движение является очень быстрым, и энергия, требуемая для перемещения стержня в нефиксированное положение, очень низкая. Либо первая и вторая плоскости могут быть одними и теми же. В этом случае усилия,передаваемые на стержень, являются строго перпендикулярными геометрической оси поступательного перемещения. Целесообразно, чтобы выполненная с возможностью перемещения вспомогательная пусковая кнопка двигала стержень из фиксированного положения регулирования в нефиксиро 7 ванное положение регулирования, проходя из первого положения во второе положение. Пусковая кнопка обеспечивает возможность того,чтобы механизмом можно было управлять вручную для проверки работы исполнительного механизма. Это также обеспечивает возможность того, чтобы переключающее движение выполнялось некоторым механизмом, который является внешним по отношению к устройству и выполненным с возможностью действовать параллельно с электромагнитным исполнительным механизмом регулирования. Шарики регулирования, стопорные шарики и, по меньшей мере, часть стержня целесообразно разместить в полости, образуемой стенками корпуса и бойком; при этом указанные стенки образуют направляющую поверхность,действующую совместно с бойком, для обеспечения пыленепроницаемости, когда бок перемещается между рабочим положением и свободным положением. Наджность механизма тем самым обеспечивается со значительной экономией средств. Краткое описание чертежей Прочие преимущества и признаки станут более очевидными из следующего ниже описания конкретных вариантов реализации изобретения, которые приводятся только в качестве не являющихся ограничивающими примеров и проиллюстрированы на прилагаемых чертежах,где фиг. 1 - осевое сечение устройства согласно первому варианту реализации изобретения в рабочем положении; фиг. 2 - увеличенное радиальное сечение по плоскости II-II фиг. 1 устройства согласно первому варианту реализации данного изобретения - в рабочем положении; фиг. 3 - увеличенный фрагмент фиг. 1; фиг. 4 - осевое сечение устройства согласно первому варианту реализации изобретения в переходном промежуточном положении переключающего перемещения; фиг. 5 - осевое сечение устройства согласно первому варианту реализации изобретения в свободном положении; фиг. 6 - радиальное сечение устройства согласно первому варианту реализации изобретения - в свободном положении; фиг. 7 - радиальное сечение устройства,иллюстрирующее теоретическое ограничение; фиг. 8 - осевое сечение устройства согласно второму варианту реализации изобретения в рабочем положении; фиг. 9 - увеличенный фрагмент фиг. 8; фиг. 10 - осевое сечение устройства согласно второму варианту реализации изобретения - в переходном промежуточном положении переключающего перемещения; фиг. 11 - осевое сечение устройства согласно второму варианту реализации изобретения - в свободном положении. 8 Подробное описание примеров осуществления изобретения Обращаясь к фиг. 1-6: шариковый исполнительный механизм 10 согласно первому варианту реализации изобретения содержит корпус 12, на котором установлен бок 14 с пружиной 16 накопления энергии, стержень регулирования 18, выполненный с возможностью перемещения в поступательном перемещении параллельно геометрической оси 19, стопорные шарики 20 и шарики 22 регулирования. Корпус 12, имеющий, по существу, цилиндрическую форму, образует осевой внутренний направляющий канал 24 для стержня регулирования 18, цилиндрическую внешнюю направляющую поверхность 26 для бойка 14, несущий выступ 28 для конца хода пружины 16 накопления энергии и пространство 30, показанное в фиг. 2, в которое входят стопорные шарики 20 и шарики 22 регулирования. Бок 14 содержит цилиндрическую трубчатую часть 32, выполненную с возможностью скользящего перемещения по внешней направляющей поверхности 26 корпуса, и продолжен за счт углубления с несколько большим внутренним диаметром,перекрывающимся крышкой 36, действующей как опорный элемент для второго конца пружины 16 накопления энергии. Бок 14 и внешняя направляющая поверхность 26 корпуса обработаны с обеспечением пыленепроницаемости. Фаска 40, показанная на фиг. 3, соединяет трубчатую направляющую часть 32 с углублением 34. Стержень 18 содержит направляющую поверхность 44, выполненную с возможностью скольжения по стенкам 24 осевого внутреннего направляющего канала корпуса, и цилиндрическую поверхность 46 качения. Пружина 16 накопления энергии является пружиной сжатия,которая накапливает потенциальную энергию при е сжатии и высвобождает кинетическую энергию при разжатии. Согласно фиг. 2 и 3: пространство 30 содержит радиальные направляющие поверхности 50 для направления стопорных шариков 20 в радиальном направлении,и осевые направляющие поверхности 52, 54 для удерживания стопорных шариков 20 в осевом направлении. Электромагнитное реле 100 с электромагнитом подключено к исполнительному механизму для привода стержня 18 регулирования. Реле установлено в углублении 102 корпуса и содержит шунт 104 для усиления магнитного поля, катушку возбуждения 106, стопор 108 для перекрытия магнитного потока и пружину 110 возврата; при этом этот узел установлен в и направляется изолирующей рамой 112. Стержень 118 выполнен из ферромагнитного материала и поэтому образует погружной сердечник, смещаемый пружиной 110 возврата в направлении увеличения люфта 114 между стержнем 18 и шунтом 104. 9 В рабочем положении согласно фиг. 1 и 3: центры стопорных шариков 20 формируют вершины первого многоугольника 56 (в этом случае - квадрат), находящегося в геометрической плоскости, перпендикулярной оси поступательного перемещения 19 стержня, в этом случае сечение в плоскости II-II фиг. 2. Шарики 22 регулирования контактируют с поверхностью качения стержня и находятся между стопорными шариками 20. Центры шариков 22 регулирования образуют вершины второго многоугольника 58 (в этом случае - квадрата), также находящегося в геометрической плоскости II-II сечения фиг. 2, внутри первого многоугольника 56, и смещающегося относительно него на одну восьмую витка, в результате чего каждый стопорный шарик 20 нажимает на два шарика 22 регулирования, и каждый шарик 22 регулирования действует как опора для двух стопорных шариков 20. Шарики регулирования прижимаются к осевому стопору 54. Стопорные шарики 20 прижимаются к фаске 40. Пружина 16 накопления энергии сжимается. Поэтому бок 14 блокируется в нужном положении стопорными шариками 20, которые в свою очередь блокированы в нужном положении шариками 22 регулирования, удерживаемыми в нужном положении стержнем за счт осевого усилия пружины возврата, которая смещает стержень от шунта. Стержень 18 находится в положении, называемом фиксированным положением регулирования. Устройство действует следующим образом: питание податся в катушку 106. Погружной сердечник, образованный стержнем 18, втягивается в направлении стрелки 116 на фиг. 4 и прижимается к шунту 104, противодействуя усилию возврата пружины 110. Шарики 22 регулирования перемещаются по указываемой на фиг. 4 поверхности 46 качения и выходят из геометрической плоскости сечения фиг. 2. При нарушении центрирования: стопорные шарики за счт оказываемого фаской 40 осевого усилия выталкивают шарики 22 регулирования, которые перемещаются в осевом направлении согласно стрелкам, изображаемым на фиг. 5. Стопорные шарики 20 смещаются в радиальном направлении к стержню 18 в освободившемся пространстве, изображаемом на фиг. 6, и высвобождают бок 14. Бок 14 смещается вверх с помощью пружины 16 накопления энергии до свободного положения, изображаемого на фиг. 5. Затем стержень 18 занимает положение, называемое нефиксированным положением регулирования. Для возвращения исполнительного механизма 10 в исходное положение: бок 14 сначала надо сместить каким-либо образом из положения согласно фиг. 5 в положение согласно фиг. 1, и при этом снова обеспечивается место для стопорных шариков 20. Стержень, на который оказывает отжимающее действие пружина 110 возврата, снова образует люфт 114 с шун 003290 10 том 104. Стопорные шарики 20 и шарики 22 регулирования затем возвращаются в сво положение, представленное на фиг. 1. Установленные в промежуточном положении стопорные шарики 20 блокируют бок в рабочем положении. Для простого моделирования системы фиг. 2 изображает: уголмежду осью, проходящей через центры двух прилегающих стопорных шариков, с одной стороны, и осью, проходящей через центр одного из двух стопорных шариков и центр прилегающего шарика регулирования, с другой стороны; уголмежду осью, проходящей через центры двух прилегающих стопорных шариков, с одной стороны, и осью, проходящей через центр стопорного шарика и пересекающей ось поступательного перемещения стержня, с другой стороны. В этой упрощнной модели: усилие, оказываемое бойком на каждый стопорный шарик,считается имеющим осевую составляющую F0,параллельную геометрической оси, и радиальную составляющую F1. Поскольку противодействующие усилия между двумя шариками, по существу, перпендикулярны контактной поверхности, поэтому стопорные шарики 20 могут передавать строго радиальные усилия шарикам 22 регулирования. Следовательно, осевые направляющие поверхности 54 шариков полностью воспринимают осевую составляющую. Каждый стопорный шарик 20 оказывает строго радиальное усилие F2 на каждый из прилегающих шариков 22 регулирования; модуль каждого усилия является функцией углав соответствии со следующей формулой: С учтом симметрии системы, исходя из того, что усилия, оказываемые бойком на каждый из стопорных шариков, имеют радиальную составляющую с модулем F1, и с учтом того,что каждый шарик регулирования подвергается усилиям, оказываемым двумя стопорными шариками, можно заключить, что каждый шарик регулирования оказывает радиальное усилие на поверхность качения стержня; при этом модульF3 указанного усилия является функцией угласогласно формулеF3=2F2sinУглыисоотносятся согласно следующим уравнениям: где n является целым числом, свыше 2, и представляющим число стопорных шариков; 11 при этом это число равно числу шариков регулирования. Таким образом, определяется взаимосвязь между отношением F3/F1 и угломдля данного числа n в следующем выражении: Поэтому очевидно, что отношение F3/F1 всегда меньше 1. В частном случае, рассматриваемом в первом варианте реализации изобретения, где n = 4, получаем модуль F3 усилия, оказываемого шариками регулирования на стержень в рабочем положении,создат энергию, нужную для работы стержня. Путм изменения диаметра стержня и диаметра шариков можно образовать уголв люфте и тем самым изменять значение F3 для данного фиксирующего усилия F1 . Поэтому можно создать широкий ассортимент исполнительных механизмов с помощью более или менее мощных пружин - без необходимости изменения рабочей энергии. Теоретический предел модели получают с помощью чисто теоретической диаграммы фиг. 7, где уголнулевой, и где усилие F3, передаваемое на стержень 18, нулевое. Приводимая выше упрощнная модель не учитывает различий в габарите, обусловленных допусками и износом механизма. Необходимо отметить, что на каждый из шариков регулирования воздействуют два стопорных шарика и стержень, в результате чего они распределяют усилия, прилагаемые стопорными шариками. При этом они автоматически центрируются в радиальной плоскости работы. Исполнительный механизм в соответствии со вторым вариантом реализации изобретения,представленным на фиг. 8-11, аналогичен выполнению первого варианта реализации, и поэтому те же ссылочные обозначения обозначают идентичные или аналогичные элементы. Исполнительный механизм в соответствии со вторым вариантом реализации отличается от первого,по существу, тем, что в рабочем положении центры стопорных шариков 22 находятся в первой геометрической плоскости 60, перпендикулярной оси поступательного перемещения 19 стержня, и центры шариков регулирования находятся во второй плоскости 62, параллельной первой плоскости 60, и смещены относительно не. В результате этого выполнения осевая составляющая суммируется с усилием, передающимся стопорными шариками к шарикам регулирования в рабочем положении. В рабочем положении: шарики 22 регулирования прижаты 12 к осевому стопору 64, формируемому головкой 48 стержня, и передают ему осевые усилия. Поэтому осевое удерживающее усилие необходимо прилагать к стержню 18, чтобы удерживать исполнительный механизм в рабочем положении. При снятии удерживающего усилия шарики 22 регулирования отталкивают стержень 18 и перемещаются вверх, высвобождая стопорные шарики 20. Электромагнитное реле 200 связано с исполнительным механизмом для приведения в действие стержня 18. Реле установлено в углублении 102 корпуса и содержит шунт 204, выполненный с возможностью усиления магнитного поля, катушку размагничивания 206, стопор 208, перекрывающий магнитный поток, постоянный магнит 210, установленный на противоположном конце стержня 18, и механическую пусковую кнопку 211; при этом этот узел направляется и удерживается в нужном положении рамой 212. Стержень 18 выполнен из ферромагнитного материала и образует погружной сердечник реле 200. Исполнительный механизм второго варианта реализации данного изобретения работает следующим образом. В рабочем положении согласно фиг. 8: постоянный магнит 210 втягивает стержень в его фиксированное положение регулирования с усилием, которое превышает осевую равнодействующую сил, оказываемых шариками 22 регулирования на стержень 18, в результате чего постоянный магнит 210 удерживает стержень 18 в фиксированном положении регулирования. При запитывании катушки 206 она создат магнитный поток, который нейтрализует магнитный поток постоянного магнита 210, в результате чего стержень 18, на который воздействуют шарики 22 регулирования, высвобождается из шунта 204 и создат люфт 214. Шарики регулирования катятся по поверхности 46 качения согласно фиг. 10 и затем выталкиваются фиг. 11. Устройство приводят в исходное положение за счт перемещения бойка какимлибо образом в рабочее положение согласно фиг. 8. По достижении этого положения: постоянный магнит 210 втягивает стержень 18, который упирается встык с шунтом 204. Пусковая кнопка 211 является дополнительным элементом, позволяющим осуществление механического переключающего перемещения устройства. В рабочем положении согласно фиг. 8 она опирается одним концом в конец стержня 18. При нажатии пусковой кнопки 211 она смещает стержень 18. В фиксированном положении регулирования: на шарики 22 регулирования оказывается радиальное и осевое воздействие, с одной стороны, двумя прилегающими стопорными шариками 20 и, с другой стороны, стержнем 18 на уровне головки 48 и поверхности 46 качения. Центрирование шариков регулирования 22 и учт разниц габаритов происходят естественно. 13 Возвращение исполнительного механизма в исходное положение можно осуществить за счт взаимодействия между стержнем и бойком: на первом этапе бок перемещается в рабочее положение и отталкивает головку стержня, освобождая пространство, необходимое для вмещения шариков; затем на втором этапе бок продолжает свой ход за предел рабочего положения и прижимает стержень к постоянному магниту. За счт этого ограничивается мощность постоянного магнита. Естественно, возможны различные модификации. Данное изобретение осуществимо с любым числом n стопорных шариков; при этом n является целым числом свыше трх или равным трм. На практике можно предусмотреть вариант с тремя шариками или пятью шариками, или более. Для любого числа n шариков (n - более трх): центры стопорных шариков формируют многоугольник с n числом сторон, и центры шариков регулирования также формируют многоугольник с n числом сторон, вписанный в предыдущий многоугольник и смещнный относительно его на /n. В более общем случае,центр каждого шарика регулирования расположен между стержнем, с одной стороны, и плоскостью, параллельной оси поступательного перемещения 19 и проходящей через центры двух стопорных шариков, с которой она контактирует, с другой стороны; это в некотором отношении означает, что каждый стопорный шарик расположен между двумя стопорными шариками, с которыми он контактирует, и стержнем. Пружина накопления энергии может быть заменена другим типом средства привода, осуществляющего привод бойка из рабочего положения в свободное положение и также постоянное смещение в нерабочее положение, когда бок находится в рабочем положении. Можно, в частности, ввести средство привода, сформированное массой, действующей силой тяжести на конец бойка, в случае, когда бок расположен вниз - в направлении, противоположном направлению, изображаемому на чертежах. Электромагнитное реле может быть устройством любого типа: с постоянным магнитом или без такового, поляризованным реле или неполяризованным и прочее. Исполнительный механизм может быть подключн к любому другому управляющему устройству, которое не является электромагнитом. Не обязательно выполнение стержня из электромагнитного материала; он может быть прикреплн к магнитному сердечнику. Чисто механические детали и электромагнитное средство привода первого и второго вариантов реализации можно поменять местами. Так, реле постоянного магнита может быть установлено на исполнительном механизме,имеющем в фиксированном положении регули 003290 14 рования компланарные центры стопорных шариков и шариков регулирования. Наоборот, реле с пружиной возврата может быть установлено на исполнительном механизме, имеющем две отдельные плоскости 60, 62. Электромагнитное реле может быть размещено в корпусе, автономном от корпуса исполнительного механизма. Шунт и стопор могут быть единой деталью. Поверхность качения может иметь некруглое радиальное поперечное сечение, например,многоугольное сечение с плоской поверхностью для одного шарика регулирования. Радиальное сечение поверхности качения может не быть постоянным. В частности, поверхность качения может быть конусной, в результате чего усилие,прилагаемое шариками регулирования к стержню, имеет осевую составляющую. Поверхность качения может быть поверхностью поворота вокруг оси поступательного перемещения стержня, имеющей любую кривизну, тем самым обеспечивая возможность модуляции осевой составляющей равнодействующей сил, прилагаемых шариками регулирования к стержню во время перемещения стержня. Направление перемещения бойка, когда происходит высвобождение пружины накопления энергии, может быть противоположно направлению перемещения стержня из его фиксированного положения регулирования в его нефиксированное положение регулирования. Стержень может выступать из бойка. В соответствии с одним из вариантов реализации изобретения, который здесь не излагается, также возможно обеспечение устройства, в котором плоскость с центрами шариков регулирования расположена под плоскостью с центрами стопорных шариков, в результате чего шарики регулирования оказывают на промежуточный стопор стержня усилие с осевой составляющей, которая отталкивает стержень к концу стопора рабочего хода. Такой исполнительный механизм имеет стабильное рабочее положение. Для высвобождения пружины накопления энергии стержень нужно двигать вверх, чтобы шарики регулирования отталкивали стопорные шарики радиально наружу; при этом стопорные шарики, контактирующие с наклонной плоскостью выступа, отталкивают бок в осевом направлении, противодействуя усилию, оказываемому пружиной накопления энергии. После прохождения шариками регулирования мртвой точки и после того, как шарики регулирования окажутся над стопорными шариками, шарики регулирования выталкиваются как в рассматриваемых выше вариантах реализации, и бок высвобождается. Этот вариант, естественно, обеспечивает преимущество большей стабильности в рабочем положении, но для его работы требуется большее количество энергии. Исполнительный механизм не обязательно должен быть подключн к средству привода. 15 Могут быть предусмотрены варианты ручного управления стержнем или любыми соответствующими средствами. Можно, в частности,предусмотреть, чтобы стержень действовал за счт собственной силы тяжести, путм размещения исполнительного механизма в переврнутом, по отношению к изображаемым на чертежах вариантам, положении. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Исполнительный механизм (10), содержащий корпус (12), определяющий геометрическую ось поступательного перемещения (19),стержень регулирования (18), выполненный с возможностью поступательного перемещения относительно корпуса (12) в направлении, параллельном геометрической оси поступательного перемещения (19) между фиксированным положением регулирования и нефиксированным положением регулирования, и содержащий поверхность (46) качения,бок (14), выполненный с возможностью поступательного перемещения относительно корпуса в направлении, параллельном геометрической оси поступательного перемещения(19) между рабочим положением и свободным положением, и содержащий опорную втулку(40),средство привода (16) бойка (14), действующее совместно с бойком (14) таким образом,что когда бок (14) находится в свом рабочем положении, то средство привода (16) бойка смещает бок для возврата в свободное положение,совокупность n стопорных шариков (20),при этом n является целым числом, большим или равным трм, каждый стопорный шарик(20) выполнен с возможностью перемещения между фиксированным положением и свободным положением, причм каждый стопорный шарик (20) в фиксированном положении прижат к опорной втулке (40) бойка, при этом каждый стопорный шарик имеет центр, совокупность n шариков (22) регулирования, при этом каждый шарик регулирования имеет центр, причм исполнительный механизм выполнен таким образом, что когда бок (14) находится в рабочем положении и стержень (18) находится в фиксированном положении управления, то центры стопорных шариков (20) находятся в первой геометрической плоскости (II-II, 60), перпендикулярной геометрической оси поступательного перемещения (19), центры шариков (22) регулирования находятся во второй геометрической плоскости (II-II, 62), перпендикулярной геометрической оси поступательного перемещения(19),отличающийся тем, что исполнительный механизм выполнен таким образом, что когда бок (14) находится в рабочем положении и 16 стержень (18) находится в фиксированном положении регулирования, то каждый шарик (22) регулирования упирается в поверхность (40) качения стержня и в два соответствующих стопорных шарика из числа совокупности стопорных шариков (20), и центр каждого шарика (20) регулирования находится между стержнем (18) и третьей геометрической плоскостью, параллельной геометрической оси поступательного перемещения и проходящей через центр каждого из указанных двух соответствующих стопорных шариков. 2. Исполнительный механизм по п.1, отличающийся тем, что средство (16) привода бойка(14) содержит пружину (16) накопления энергии, действующую совместно с корпусом (12) и бойком (14), таким образом, что когда бок (14) находится в свом рабочем положении, то пружина (16) накопления энергии находится в рабочем состоянии и смещает бок (14) для возврата в свободное положение. 3. Исполнительный механизм по п.2, отличающийся тем, что пружина (16) накопления энергии является спиральной пружиной, соосной с геометрической осью (19). 4. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что стержень (18) установлен по геометрической оси поступательного перемещения (19),опорная втулка (40) бойка образует поверхность поворота вокруг геометрической оси поступательного перемещения (19), центры стопорных шариков образуют n вершин многоугольника(56) с n сторонами, с центром на геометрической оси поступательного перемещения (19), и центры шариков регулирования образуют n вершин многоугольника (58) с n сторонами, с центром на геометрической оси поступательного перемещения (19). 5. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что также содержит средство возврата (110, 210) для возврата стержня в фиксированное положение регулирования; средство привода (106, 206) для привода стержня в нефиксированное положение регулирования. 6. Исполнительный механизм по п.5, отличающийся тем, что также содержит выполненный с возможностью перемещения узел из ферромагнитного материала, который осуществляет скользящее поступательное перемещение в закреплении со стержнем, при этом средство привода стержня (106, 206) содержит электромагнитную обмотку (106, 206) возбуждения для привода выполненного с возможностью перемещения узла. 7. Исполнительный механизм по п.6, отличающийся тем, что выполненный с возможностью перемещения узел расположен в полости 17 8. Исполнительный механизм по любому одному из пп.6 или 7, отличающийся тем, что выполненный с возможностью перемещения узел сформирован частью стержня (18). 9. Исполнительный механизм по любому одному из пп.6-8, отличающийся тем, что обмотка (106, 206) опирается на корпус. 10. Исполнительный механизм по любому одному из пп.6-9, отличающийся тем, что средство возврата стержня содержит постоянный магнит (210), втягивающий выполненный с возможностью перемещения узел. 11. Исполнительный механизм по любому одному из пп.6-10, отличающийся тем, что средство возврата стержня содержит пружину возврата (110). 12. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что стержень (18) содержит осевой стопор(64), на который опираются шарики (22) регулирования, когда бок (14) находится в рабочем положении и стержень находится в фиксированном положении управления, при этом имеются отдельные первая (60) и вторая (62) геометрические плоскости, при этом вторая геометрическая плоскость (62) находится между первой геометрической плоскостью (60) и осевым стопором (64). 13. Исполнительный механизм по п.12, отличающийся тем, что выполнен таким образом,что стержень (18) при перемещении из фиксированного положения регулирования в нефиксированное положение регулирования перемещается в рабочем направлении, при этом вторая геометрическая плоскость (62) смещена из пер 003290 18 вой геометрической плоскости (60) в указанном рабочем направлении. 14. Исполнительный механизм по любому одному из пп.1-11, отличающийся тем, что первая и вторая геометрические плоскости (II-II) являются одной и той же плоскостью. 15. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что также содержит выполненную с возможностью перемещения вспомогательную пусковую кнопку (211), перемещающую стержень (18) из фиксированного положения регулирования в нефиксированное положение регулирования при прохождении из первого положения во второе положение. 16. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что шарики (22) регулирования, стопорные шарики (20) и, по меньшей мере, часть стержня(18) находятся в полости, определяемой стенками корпуса (12) и бойком (14), при этом указанные стенки формируют направляющую поверхность (26), действующую совместно с бойком,для обеспечения пыленепроницаемости, когда бок перемещается между рабочим положением и нерабочим положением. 17. Исполнительный механизм по любому одному из предыдущих пунктов, отличающийся тем, что выполнен таким образом, что когда стержень (18) выходит из фиксированного положения регулирования и начинает перемещаться в нефиксированное положение регулирования, каждый шарик (22) регулирования катится по поверхности (40) качения.
МПК / Метки
МПК: H01H 3/30
Метки: механизм, шариковый, исполнительный
Код ссылки
<a href="https://eas.patents.su/11-3290-sharikovyjj-ispolnitelnyjj-mehanizm.html" rel="bookmark" title="База патентов Евразийского Союза">Шариковый исполнительный механизм</a>
Электроуправляемый исполнительный механизм затвора или задвижки с электродвигателем непосредственно на ведущем валу исполнительного механизма
Номер патента: 2335
Опубликовано: 25.04.2002
Авторы: Уитворт Кристофер Джон, Киллоу Дуглас
МПК: H02K 7/14, F16K 31/04, H02P 5/17...
Метки: исполнительного, механизм, непосредственно, ведущем, задвижки, электродвигателем, механизма, затвора, исполнительный, валу, электроуправляемый
Формула / Реферат:
1. Электроуправляемый исполнительный механизм затвора или задвижки с моментом трогания приводного штока затвора или задвижки более 10 Нм и состоящий из (I) полого корпуса, (II) ведущего вала, который установлен с возможностью вращения в корпусе и у которого один конец выступает из корпуса для сочленения с приводным штоком затвора или заслонки, (III) электродвигателя с ротором и статором, способного создавать крутящий момент более 10 Нм и...
Устройство регулятора потока текучей среды, исполнительный механизм клапана и способ его изготовления
Номер патента: 1508
Опубликовано: 23.04.2001
Авторы: Штайнбах Майкл, Висс Джерри С., Миллер Чарлз Е., Йосида Луис Т., Бэлсли Ричард Б.
МПК: F16K 31/02, G05D 7/06
Метки: регулятора, исполнительный, клапана, текучей, среды, механизм, способ, устройство, изготовления, потока
Формула / Реферат:
1. Устройство регулятора потока текучей среды, содержащее впускную камеру давления и выпускную камеру давления, разделенные перегородкой, которая имеет отверстие, проходящее между впускной камерой давления и выпускной камерой давления, причем впускная камера давления подсоединена к источнику газа, который поддерживает газ во впускной камере давления под давлением впускной камеры давления, существенно превышающем давление в выпускной камере...
Велосипед и подобный ему механизм
Номер патента: 2369
Опубликовано: 25.04.2002
Автор: Фарина Эрнесто
МПК: B62M 1/04
Метки: механизм, ему, подобный, велосипед
Формула / Реферат:
1. Велосипед и подобный ему механизм, имеющий заднее колесо (22) или маховое колесо и снабженный педальным приводом, содержащим центральную ось и зубчатое колесо (5), соединенные друг с другом как одно целое, и левый кривошип (1) и правый кривошип (1), которые присоединены к двум концам центральной оси, отличающийся тем, что с каждым из указанных кривошипов (1), левым и правым, механическими средствами (6, 8, 10) с возможностью вращения соединен...
Силовой аксоидный механизм
Номер патента: 482
Опубликовано: 26.08.1999
Авторы: Ким Леонид Борисович, Дон Евгений Алексеевич, Ким Флорид Борисович
МПК: F16H 21/16
Метки: силовой, механизм, аксоидный
Формула / Реферат:
1. Силовой аксоидный механизм, содержащий промежуточное звено для передачи движения между соединенными с ним двумя концевыми элементами, оснащенными опорными поверхностями и выполненными с возможностью поступательных перемещений с усилиями и скоростями, отражающимися зависимостями: P2=P1 (sin a 1/ sin a 2)+D P; V2=V1 (cos a 1/cos a 2); где Р2, P1 - усилия на концевых элементах; V2, V1 - скорости перемещения концевых элементов; a 2, a 1...
Управляющий механизм прерывателя электрической цепи
Номер патента: 520
Опубликовано: 28.10.1999
Автор: Дельканбр Филип
МПК: H01H 71/00
Метки: управляющий, механизм, цепи, прерывателя, электрической
Формула / Реферат:
1. Управляющий механизм прерывателя электрической цепи с изолирующим корпусом (46), защищающим пару контактов, неподвижный (34) и подвижный (36), причем подвижный контакт поддерживается контактным рычагом (12), приводимым в движение между замкнутым положением и разомкнутым положением механизмом (10), который содержит рукоятку (20), снабженную указателем (22), показывающим ее положение и/или режим работы, пластину (16) для приведения в действие...
Предыдущий патент: Устройство для создания поднимающего и опускающего движений
Следующий патент: Комплекс динамической защиты военной техники. комплекс динамической защиты башни.
Случайный патент: Полифункциональный биосовместимый гидрогель и способ его получения