Электроуправляемый исполнительный механизм затвора или задвижки с электродвигателем непосредственно на ведущем валу исполнительного механизма
Формула / Реферат
1. Электроуправляемый исполнительный механизм затвора или задвижки с моментом трогания приводного штока затвора или задвижки более 10 Нм и состоящий из
(I) полого корпуса,
(II) ведущего вала, который установлен с возможностью вращения в корпусе и у которого один конец выступает из корпуса для сочленения с приводным штоком затвора или заслонки,
(III) электродвигателя с ротором и статором, способного создавать крутящий момент более 10 Нм и установленного в корпусе, с ротором, соосно установленным на вале, и статором, неподвижно закрепленным внутри корпуса,
(IV) устройств управления работой электродвигателя.
2. Исполнительный механизм по п.1, отличающийся тем, что электродвигателем является электродвигатель с переменной скоростью вращения, с постоянным магнитом и постоянным крутящим моментом.
3. Исполнительный механизм по п.2, отличающийся тем, что электродвигателем является высокомоментный электродвигатель постоянного тока, управляемый широтно-импульсной модуляцией (ШИМ).
4. Исполнительный механизм по п.3, отличающийся тем, что электродвигатель обеспечивает переменную скорость на выходе ведущего вала в заданном диапазоне скоростей.
5. Исполнительный механизм по п.3, отличающийся тем, что электродвигатель обеспечивает постоянный крутящий момент в заданном диапазоне скоростей.
6. Исполнительный механизм по п.1, отличающийся тем, что ротор установлен с возможностью вращения на ведущем вале и в исполнительном механизме имеется муфта для сочленения ротора и ведущего вала.
7. Исполнительный механизм по п.6, отличающийся тем, что в муфте имеются поводковая втулка, установленная с возможностью скольжения по приводному валу, но без возможности вращения относительно ведущего вала, поводковые пальцы на поводковой втулке, поводковые пальцы на роторе и пружинное устройство для обычного смещения поводковой втулки в направлении к ротору, чтобы поводковые пальцы находились в зацеплении.
8. Исполнительный механизм по п.7, состоящий из кулачкового устройства для подключения поводковой втулки и отведения поводковой втулки от ротора, противодействуя пружинному устройству, чтобы расцепить поводковые пальцы.
9. Исполнительный механизм по п.8, отличающийся тем, что второй конец ведущего вала соединен с ручным штурвалом для проворачивания ведущего вала, когда расцеплены поводковые пальцы.
10. Исполнительный механизм по п.1, отличающийся тем, что устройством управления работой электродвигателя является блок управления электродвигателем, состоящий из схем управления и защиты электродвигателя, и блок управления по операторскому интерфейсу для установки рабочих параметров исполнительного механизма.
11. Исполнительный механизм по п.10, отличающийся тем, что устройство управления содержит микропроцессор, запрограммированный на возможность производить установку рабочих параметров и выдавать тревожные сигналы при превышении любой уставки.
12. Исполнительный механизм по п.10, отличающийся тем, что блок управления по операторскому интерфейсу позволяет производить установку рабочих параметров на месте или дистанционно.

Текст
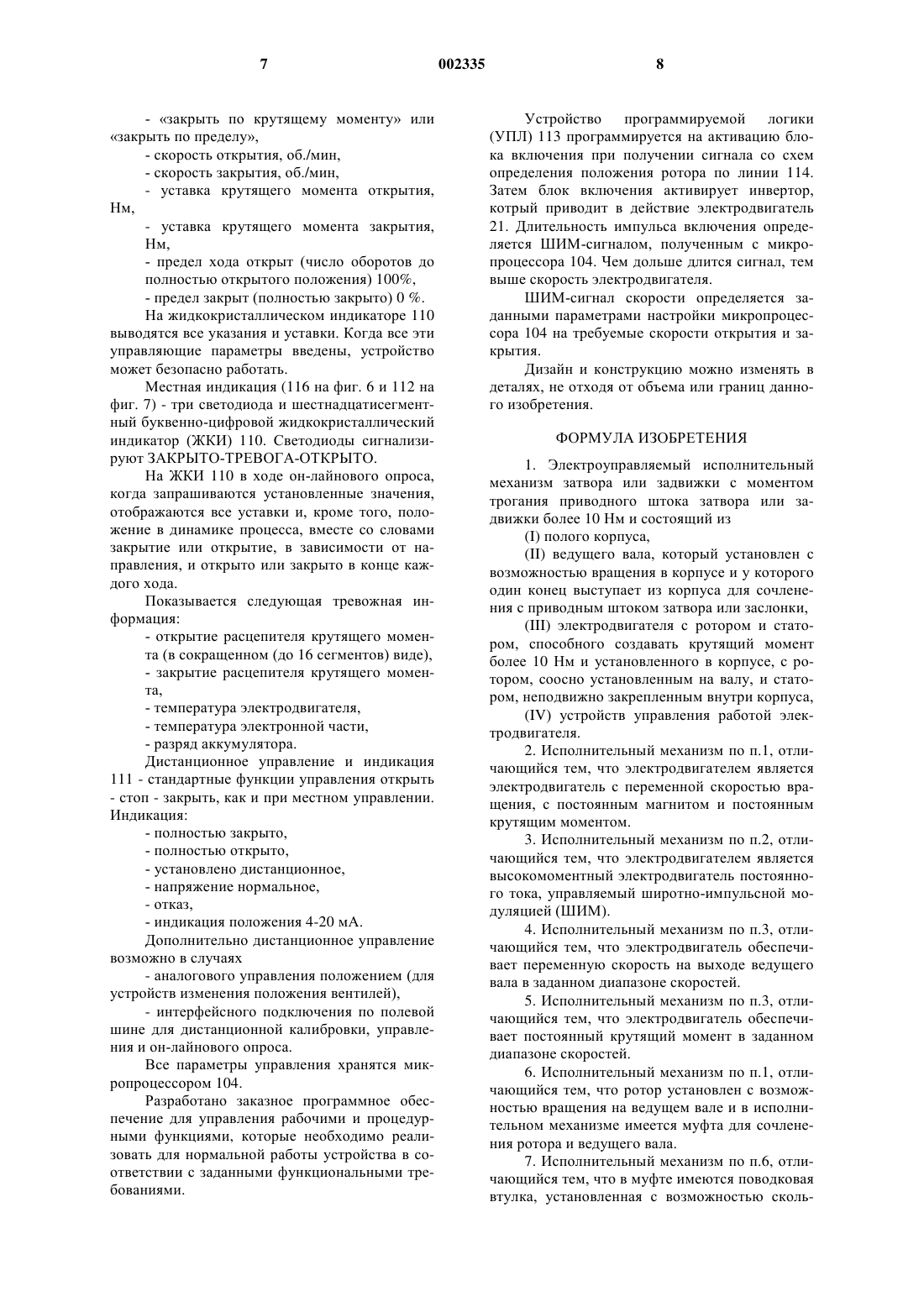
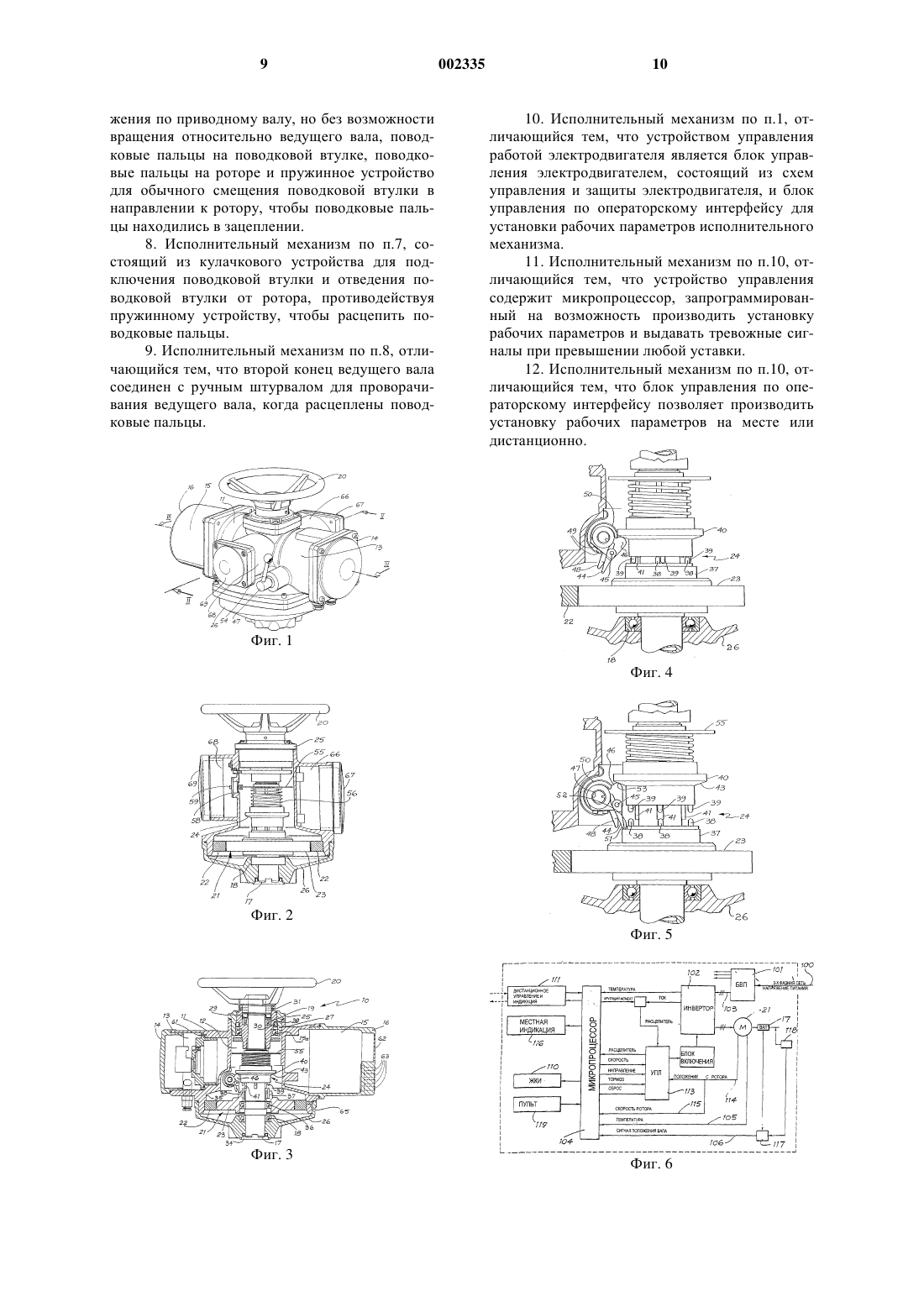
1 Область изобретения Данное изобретение относится к электроприводимым первичным устройствам, точнее, к электроуправляемым исполнительным механизмам для открытия, закрытия и/или изменения положения затворов и задвижек в целях регулирования потока жидкости в сетях и трубопроводах. Известный уровень Автоматическое регулирование потоков жидкости в промышленных сетях и трубопроводах широко применимо в таких областях, как производство электроэнергии, нефтяной, нефтеи газоперерабатывающей,целлюлознобумажной, химической, пищевой, нефтехимической, водоподготовительной и водоочистной промышленности. До настоящего времени в исполнительных механизмах использовались односкоростные асинхронные двигатели переменного тока, которые соединялись с исполнительным механизмом через червячный редуктор, объединенный с исполнительным механизмом. Одним из недостатков таких известных систем является то, что требуется сочетание различных двигателей и редукторов для обеспечения необходимых скоростей на выходе, в результате чего возрастает парк оборудования. Кроме того, обычно для изменения требуемой скорости необходима замена составных частей или модели двигателя, т.к. каждое сочетание двигателя и редуктора имеет свою постоянную скорость на выходе. Другим недостатком известных систем является то, что для обеспечения заданного крутящего момента на выходе в широком диапазоне скоростей требуется большая гамма двигателей. В целях снижения затрат обычной практикой является ограничение числа применяемых двигателей, что приводит при росте скоростей к снижению величины крутящего момента. Еще одним недостатком известных систем является то, что при наличии редуктора появляются изнашивающиеся поверхности (и потери на трение) между двигателем и выходным валом привода. Известные исполнительные механизмы различны по степени наличия электронных и механических функций в пределах системы для наладки оборудования и для регулировки на местах. Однако наличие этих функций влечет некоторые проблемы, включая разборку для проведения физических наладок, что вызывает простои, а все работы, связанные с доступом к деталям, требуют отключения подаваемого напряжения в целях безопасности, а также наличия допусков. У большинства известных механизмов имеется возможность ручного управления ими при отказах электропитания. В такие моменты важно осознанно управлять этими действиями вручную для того, чтобы сохранить индикацию 2 положения и не утратить исходную калибровку. Некоторые имеющиеся сейчас стандартные исполнительные механизмы снабжены сложными системами передач, чтобы обеспечить индикацию положения. Краткое изложение сути изобретения Согласно одной особенности изобретения имеется электроуправляемый исполнительный механизм для воздействия на затвор или задвижку с моментом трогания приводного штока исполнительного механизма более 10 Нм и состоящий из(I) полого корпуса,(II) ведущего вала, который установлен с возможностью вращения в корпусе и у которого один конец выступает из корпуса для сочленения с приводным штоком затвора или заслонки,(III) электродвигателя с ротором и статором, способного создавать крутящий момент более 10 Нм и установленного в корпусе, с ротором, соосно установленным на валу, и статором, неподвижно закрепленным внутри корпуса,(IV) устройств управления работой электродвигателя. В предпочтительном исполнении изобретения имеется единственное устройство сочленения электродвигателя и ведущего вала - муфта. Предпочтительный электродвигатель с переменной скоростью вращения, с постоянным магнитом и постоянным крутящим моментом это высокомоментный электродвигатель постоянного тока, управляемый широтно-импульсной модуляцией (ШИМ). ШИМ-управляемый электродвигатель постоянного тока с постоянным магнитом обеспечивает любую переменную скорость на выходе(с шагом 1 об/мин) в диапазоне скоростей от минимальной до максимальной. Таким образом,одно воплощение изобретения может заменить от 6 до 12 различных исполнительных механизмов для комбинаций электродвигателей постоянного тока и редукторов известного уровня техники. Скорость электродвигателя можно изменять в заданном диапазоне путем изменения уставок скважности ШИМ (с пульта на оборудовании, ручного пульта или с удаленного пункта). Два воплощения настоящего изобретения могут заменить 24 различные комбинации электродвигателя постоянного тока и редукторов известного уровня техники (номенклатура одного поставщика), что в результате ведет к меньшему запасу запасных частей и дает возможность избежать смены схемы для изменения показателя скорость/крутящий момент. Электродвигатель постоянного тока с постоянным магнитом обеспечивает постоянный крутящий момент во всем диапазоне скоростей. При осевом расположении электродвигателя и непосредственном подсоединении вала исчезают изнашивающиеся поверхности в редукторе, который требуется в известных систе 3 мах. Это изобретение обеспечивает улучшенный механический коэффициент полезного действия, т.к. исчезают потери на трение, присущие встроенным редукторам известных систем. Преимуществом изобретения является и то, что определение положения и адаптивное управление в ходе ручных операций достигаются без сложных передач. Электродвигатель состоит из статора и ротора. Статор подключен к трехфазному твердотельному полупроводниковому устройству включения, которое питается напряжением постоянного тока от трехфазного выпрямителя. Включив твердотельное устройство, электродвигатель превращается в двигатель переменного тока. Таким образом, устройство включения действует как инвертор. Управляя твердотельным устройством включения с помощью широтно-импульсно модулированного (ШИМ) сигнала, можно плавно изменять скорость электродвигателя от минимальной до максимальной. Электродвигатель можно разработать и на заданный диапазон скоростей с необходимым крутящим моментом. Микропроцессор управляет ШИМсигналом для скоростей, которые установлены как рабочие параметры, и поддерживает эти скорости с помощью датчика положения ротора. Если скорость начинает падать из-за приложенной на вал нагрузки, то микропроцессор линейно изменяет ШИМ-сигнал, в результате на статор поступает большее напряжение, что позволяет изменить скорость и поддержать больший крутящий момент при установленной постоянной скорости. Применение этого электродвигателя в качестве основного элемента исполнительного механизма позволяет одним разработанным узлом обеспечить создание требуемого высокого крутящего момента на выходе в целом диапазоне выходных скоростей. Исполнительный механизм по данному изобретению имеет блок управления электродвигателем и блок микропроцессорного управления по операторскому интерфейсу. Блок управления электродвигателем содержит все схемы, необходимые для управления электродвигателем и его защиты. Микропроцессор запрограммирован на управление блоком широтно-импульсной модуляции электродвигателя, что делает возможным изменять скорость электродвигателя во всем диапазоне его скоростей. В микропроцессор также зашита программа, которая позволяет установить все рабочие параметры и выдать тревожный сигнал при превышении любой уставки. В одном из воплощений изобретения исполнительный механизм имеет блок управления по операторскому интерфейсу, содержащий схемы, которые позволяют устанавливать все параметры как на месте, так и дистанционно. 4 Этот блок управления соединяется с микропроцессором, чтобы работа исполнительного механизма отвечала требованиям системы управления, функциональным элементом которой является исполнительный механизм. По этим схемам через согласующий интерфейс возможны также операции по полевой шине. Краткое описание чертежей Фиг. 1 - общий вид электроуправляемого исполнительного механизма затвора в соответствии с одним из воплощений изобретения; фиг. 2 - разрез по оси II-II фиг. 1; фиг. 3 - разрез по оси III-III фиг. 1; фиг. 4 - увеличенный вертикальный вид сбоку разъединительных кулачка и защелки,поводковые пальцы поводковой втулки в зацеплении с поводковыми пальцами ротора; фиг. 5 - вид, как и на фиг. 4, поводковые пальцы поводковой муфты в расцеплении с поводковыми пальцами ротора; фиг. 6 - блок-схема первой системы управления работой исполнительного механизма согласно фиг. 1-5; фиг. 7 - блок-схема второй системы управления работой исполнительного механизма согласно фиг. 1-5. Пути осуществления изобретения Исполнительный механизм 10 по воплощению изобретения согласно фиг. 1-5 состоит из корпуса 11, образованного отсеком вала 12,концевого отсека 13, закрытого концевой крышкой 14, отсека управления 15, закрытого крышкой отсека управления 16, вспомогательного отсека 66 (см. фиг. 1 и 3), закрытого крышкой 67, и отсека датчика положения 68 (см. фиг. 1 и 3), закрытого крышкой 69. Вал 17 опирается на подшипник 18 в нижнем отделе корпуса 11 и подшипник 19 в верхнем отделе корпуса 11. Вал 17 приводится в движение электродвигателем 21, статор 22 которого закреплен на корпусе 11. Ротор 23 сочленяется с валом 17 посредством муфты 24. Вал 17, когда не работает электродвигатель 21, например, в случае аварий электроснабжения, можно также проворачивать вручную при помощи ручного штурвала 20. Отсек вала 12 закрыт верхней крышкой 25 и основанием привода 26. В верхней крышке 25 имеется отверстие по центру для ступицы 28 ручного штурвала 20. В юбке 27 верхней крышки 25 установлен подшипник 19 а. В ступице 28 имеется отверстие по центру для вала 17, а также подшипник 19 между ними. Ступица 26 уплотнена относительно вала 17 сальником 29 и относительно верхней крышки 25 сальником 30. В этом случае ручной штурвал 20 зафиксирован на ступице 28 шпилькой 31. В основании привода 26 имеется отверстие по центру для конца вала 17, опирающегося на подшипник 18. Основание привода 26 уплотнено относительно вала 17 сальником 34. Основа 5 ние привода 26 закреплено на корпусе 11 винтами (не показаны). На фиг. 3, 4 и 5 видно в подробностях, что электродвигатель 21 расположен над основанием привода 26, а статор 22 закреплен на юбке 35 корпуса 11. Статор 22 закреплен на юбке 35 винтами 65. Ротор 23 установлен с возможностью вращения на валу 17 в подшипнике 36. В ступице 37 ротора 23 имеется множество выступающих поводковых пальцев 38, входящих в зацепление с поводковыми лапками 39 на поводковой втулке 40, которая установлена с возможностью скольжения по валу 17 на шпонках 41. На нижней стороне поводковой втулки 40 имеется полка кулачка 43, на которую приходит кулачок 46, закрепленный на разъединительном вале 47. Защелка 44, которая установлена с возможностью проворачивания вокруг оси 45 на кулачке 46, смещается пружиной 48, закрепленной на кулачке 46 винтами 49. Разъединительный вал 47 смещается возвратной пружиной 50. На фиг. 4 исполнительный механизм показан в режиме механического привода. Разъединительный вал 47 проворачивается рукояткой 54 (см. фиг. 1) для того, чтобы поводковые лапки 39 смогли выйти из зацепления с поводковыми пальцами 38, как показано на фиг. 4 для случая привода вала 17 вручную. На фиг. 5 исполнительный механизм показан в ручном режиме, поводковые лапки 39 поводковой втулки 40 выведены из зацепления с поводковыми пальцами 38 ступицы 37 ротора за счет контакта хвостовика 51 защелки 44 с буртиком 52 ступицы 37 ротора и головки 53 кулачка 46 с полкой кулачка 43 поводковой втулки 40. Диск датчика положения вала 55 установлен на валу 17 над поводковой втулкой 40. Пружина 56 между диском 55 и поводковой втулкой 40 отжимает поводковую втулку 40 вниз тогда, когда хвостик 51 защелки 44 уходит с буртика 52 при вращении ротора 23. Диск датчика положения вала 55 приходит на уровень головки датчика положения вала 58, закрепленной в отверстии корпуса 11 винтами 59. На фиг. 3 показан концевой отсек 13 с клеммной коробкой 60, закрепленной на корпусе 11 винтами 61. На крышке отсека управления 16 имеются окошко 62 и выключатели/кнопки 63. На фиг. 6 и 7 показаны системы управления работой и индикации электропитания для исполнительного механизма согласно фиг. 1-5. По линиям 100 подается питание трехфазной сети на блок включения питания 101, который по линии 103 далее питает инвертор 102. С инвертора 102 питание поступает на электродвигатель 21, который вращает вал 17. При отсутствии сетевого питания в случае ручного режима предусмотрено аварийное питание, подаваемое с аккумуляторной батареи на 6 схему 117 определения положения вала, что и позволяет зафиксировать любой поворот вала(вручную) в момент отсутствия питания. Выключатель аккумулятора 118 отключает аккумуляторное питание, если не зафиксировано вращение вала в указанный период. Любой поворот вала вручную автоматически вызывает срабатывание схемы аккумуляторного питания через выключатель 118. На микропроцессор 104 поступают сигналы температуры электродвигателя 21 по линии 105, положения вала 17 - по линии 106, температуры инвертора 102 - по линии 107 и скорости ротора - по линии 115. Все функции управления обрабатываются микропроцессором 104, который поочередно подает сигналы требуемой скорости и уставок крутящего момента на устройство программируемой логики (УПЛ) 113. Фиг. 6 - местное управление ведется с пульта 119, а дистанционное - с блока 111. До ввода устройства в работу с пульта 119 устанавливаются следующие параметры:- код доступа,режим: ВЫКЛЮЧЕНО-МЕСТНОЕДИСТАНЦИОННОЕ-КАЛИБРОВКА,- дотягивание или удержание,- аварийно закрыть, открыть или стоп,- закрыть по крутящему моменту или закрыть по пределу,- скорость открытия, об./мин,- скорость закрытия, об./мин,- уставка крутящего момента открытия,Нм,- уставка крутящего момента закрытия,Нм,- предел хода открыт (число оборотов до полностью открытого положения) 100%,- предел закрыт (полностью закрыто) 0%. Местное управление осуществляется через две кнопки на пульте - для функций открыть и закрыть - в режимах МЕСТНОЕ или КАЛИБРОВКА. На жидкокристаллическом индикаторе 110 выводятся все указания и уставки. Когда все эти управляющие параметры введены, устройство может безопасно работать. Фиг. 7 - местное управление ведется с ручного пульта (ИК-источник) 108, а дистанционное - с блока 111. Местная индикация 112 - имеется два переключателя на входе управления устройства,одним выбирается управление по ВЫКЛЮЧЕНО режимов Местное или Дистанционное, а другим - по СТОП команд закрыть или открыть. До ввода устройства в работу с ручного пульта (ИК-источник) 108 устанавливаются следующие параметры:- закрыть по крутящему моменту или закрыть по пределу,- скорость открытия, об./мин,- скорость закрытия, об./мин,- уставка крутящего момента открытия,Нм,- уставка крутящего момента закрытия,Нм,- предел хода открыт (число оборотов до полностью открытого положения) 100%,- предел закрыт (полностью закрыто) 0 %. На жидкокристаллическом индикаторе 110 выводятся все указания и уставки. Когда все эти управляющие параметры введены, устройство может безопасно работать. Местная индикация (116 на фиг. 6 и 112 на фиг. 7) - три светодиода и шестнадцатисегментный буквенно-цифровой жидкокристаллический индикатор (ЖКИ) 110. Светодиоды сигнализируют ЗАКРЫТО-ТРЕВОГА-ОТКРЫТО. На ЖКИ 110 в ходе он-лайнового опроса,когда запрашиваются установленные значения,отображаются все уставки и, кроме того, положение в динамике процесса, вместе со словами закрытие или открытие, в зависимости от направления, и открыто или закрыто в конце каждого хода. Показывается следующая тревожная информация:- открытие расцепителя крутящего момента (в сокращенном (до 16 сегментов) виде),- закрытие расцепителя крутящего момента,- температура электродвигателя,- температура электронной части,- разряд аккумулятора. Дистанционное управление и индикация 111 - стандартные функции управления открыть- полностью закрыто,- полностью открыто,- установлено дистанционное,- напряжение нормальное,- отказ,- индикация положения 4-20 мА. Дополнительно дистанционное управление возможно в случаях- аналогового управления положением (для устройств изменения положения вентилей),- интерфейсного подключения по полевой шине для дистанционной калибровки, управления и он-лайнового опроса. Все параметры управления хранятся микропроцессором 104. Разработано заказное программное обеспечение для управления рабочими и процедурными функциями, которые необходимо реализовать для нормальной работы устройства в соответствии с заданными функциональными требованиями.(УПЛ) 113 программируется на активацию блока включения при получении сигнала со схем определения положения ротора по линии 114. Затем блок включения активирует инвертор,котрый приводит в действие электродвигатель 21. Длительность импульса включения определяется ШИМ-сигналом, полученным с микропроцессора 104. Чем дольше длится сигнал, тем выше скорость электродвигателя. ШИМ-сигнал скорости определяется заданными параметрами настройки микропроцессора 104 на требуемые скорости открытия и закрытия. Дизайн и конструкцию можно изменять в деталях, не отходя от объема или границ данного изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Электроуправляемый исполнительный механизм затвора или задвижки с моментом трогания приводного штока затвора или задвижки более 10 Нм и состоящий из(I) полого корпуса,(II) ведущего вала, который установлен с возможностью вращения в корпусе и у которого один конец выступает из корпуса для сочленения с приводным штоком затвора или заслонки,(III) электродвигателя с ротором и статором, способного создавать крутящий момент более 10 Нм и установленного в корпусе, с ротором, соосно установленным на валу, и статором, неподвижно закрепленным внутри корпуса,(IV) устройств управления работой электродвигателя. 2. Исполнительный механизм по п.1, отличающийся тем, что электродвигателем является электродвигатель с переменной скоростью вращения, с постоянным магнитом и постоянным крутящим моментом. 3. Исполнительный механизм по п.2, отличающийся тем, что электродвигателем является высокомоментный электродвигатель постоянного тока, управляемый широтно-импульсной модуляцией (ШИМ). 4. Исполнительный механизм по п.3, отличающийся тем, что электродвигатель обеспечивает переменную скорость на выходе ведущего вала в заданном диапазоне скоростей. 5. Исполнительный механизм по п.3, отличающийся тем, что электродвигатель обеспечивает постоянный крутящий момент в заданном диапазоне скоростей. 6. Исполнительный механизм по п.1, отличающийся тем, что ротор установлен с возможностью вращения на ведущем вале и в исполнительном механизме имеется муфта для сочленения ротора и ведущего вала. 7. Исполнительный механизм по п.6, отличающийся тем, что в муфте имеются поводковая втулка, установленная с возможностью сколь 9 жения по приводному валу, но без возможности вращения относительно ведущего вала, поводковые пальцы на поводковой втулке, поводковые пальцы на роторе и пружинное устройство для обычного смещения поводковой втулки в направлении к ротору, чтобы поводковые пальцы находились в зацеплении. 8. Исполнительный механизм по п.7, состоящий из кулачкового устройства для подключения поводковой втулки и отведения поводковой втулки от ротора, противодействуя пружинному устройству, чтобы расцепить поводковые пальцы. 9. Исполнительный механизм по п.8, отличающийся тем, что второй конец ведущего вала соединен с ручным штурвалом для проворачивания ведущего вала, когда расцеплены поводковые пальцы. 10 10. Исполнительный механизм по п.1, отличающийся тем, что устройством управления работой электродвигателя является блок управления электродвигателем, состоящий из схем управления и защиты электродвигателя, и блок управления по операторскому интерфейсу для установки рабочих параметров исполнительного механизма. 11. Исполнительный механизм по п.10, отличающийся тем, что устройство управления содержит микропроцессор, запрограммированный на возможность производить установку рабочих параметров и выдавать тревожные сигналы при превышении любой уставки. 12. Исполнительный механизм по п.10, отличающийся тем, что блок управления по операторскому интерфейсу позволяет производить установку рабочих параметров на месте или дистанционно.
МПК / Метки
МПК: H02P 5/17, H02K 7/14, F16K 31/04
Метки: непосредственно, электроуправляемый, механизм, валу, исполнительного, задвижки, ведущем, затвора, механизма, электродвигателем, исполнительный
Код ссылки
<a href="https://eas.patents.su/7-2335-elektroupravlyaemyjj-ispolnitelnyjj-mehanizm-zatvora-ili-zadvizhki-s-elektrodvigatelem-neposredstvenno-na-vedushhem-valu-ispolnitelnogo-mehanizma.html" rel="bookmark" title="База патентов Евразийского Союза">Электроуправляемый исполнительный механизм затвора или задвижки с электродвигателем непосредственно на ведущем валу исполнительного механизма</a>
Устройство регулятора потока текучей среды, исполнительный механизм клапана и способ его изготовления
Номер патента: 1508
Опубликовано: 23.04.2001
Авторы: Штайнбах Майкл, Бэлсли Ричард Б., Йосида Луис Т., Миллер Чарлз Е., Висс Джерри С.
МПК: G05D 7/06, F16K 31/02
Метки: регулятора, текучей, изготовления, механизм, клапана, способ, устройство, исполнительный, потока, среды
Формула / Реферат:
1. Устройство регулятора потока текучей среды, содержащее впускную камеру давления и выпускную камеру давления, разделенные перегородкой, которая имеет отверстие, проходящее между впускной камерой давления и выпускной камерой давления, причем впускная камера давления подсоединена к источнику газа, который поддерживает газ во впускной камере давления под давлением впускной камеры давления, существенно превышающем давление в выпускной камере...
Противоугонные устройства транспортного средства /варианты/, узел замкового механизма, узел замкового механизма для капота транспортных средств.
Номер патента: 2035
Опубликовано: 24.12.2001
Автор: Буравков Алексей Вячеславовия
МПК: G08B 13/00, E05B 65/20, B60R 25/00...
Метки: средств, замкового, варианты, транспортных, капота, противоугонные, устройства, механизма, средства, транспортного, узел
Формула / Реферат:
1. Противоугонное устройство транспортного средства, содержащее блок кодирования управляющих сигналов, выход которого соединен с передатчиком, установленные на транспортном средстве приемник, выход которого соединен с блоком декодирования управляющих сигналов, установленные на двери транспортного средства первый замковый механизм, узел для отпирания замкового механизма, соединенный с кнопкой ручного управления блокировкой и кинематически...
Соединительное устройство для нитеподающего механизма
Номер патента: 446
Опубликовано: 26.08.1999
Авторы: Ламппрехт Альфред, Кауфманн Рихард, Шмодде Херманн
МПК: D04B 15/48
Метки: механизма, устройство, соединительное, нитеподающего
Формула / Реферат:
1. Соединительное устройство (30) для нитеподающего механизма, содержащее, по меньшей мере, первую полумуфту (12а), которая установлена с возможностью вращения, соединена с приводным средством (34) и снабжена первым создающим геометрическое замыкание соединительным элементом (38), вторую полумуфту (15а), которая установлена с возможностью вращения концентрично первой полумуфте (12а), соединена с приводным средством (6) и снабжена вторым...
Управляющий механизм прерывателя электрической цепи
Номер патента: 520
Опубликовано: 28.10.1999
Автор: Дельканбр Филип
МПК: H01H 71/00
Метки: управляющий, электрической, прерывателя, цепи, механизм
Формула / Реферат:
1. Управляющий механизм прерывателя электрической цепи с изолирующим корпусом (46), защищающим пару контактов, неподвижный (34) и подвижный (36), причем подвижный контакт поддерживается контактным рычагом (12), приводимым в движение между замкнутым положением и разомкнутым положением механизмом (10), который содержит рукоятку (20), снабженную указателем (22), показывающим ее положение и/или режим работы, пластину (16) для приведения в действие...
Механизм для преобразования возвратно-поступательного движения во вращательное и наоборот
Номер патента: 159
Опубликовано: 29.10.1998
Автор: Адахан Кармели
МПК: F01B 9/00, F16H 21/32, F04B 35/04...
Метки: движения, наоборот, вращательное, возвратно-поступательного, механизм, преобразования
Формула / Реферат:
1. Механизм для преобразования движения, устанавливаемый между ведущим устройством и ведомым устройством для того, чтобы вращательное движение в одном устройстве соответствовало возвратно-поступательному движению в другом устройстве, и содержащий: корпус; возвратно-поступательный элемент, установленный с возможностью возвратно-поступательного движения вдоль продольной оси и соединяемый первым концом с одним из указанных устройств; вращающийся...
Предыдущий патент: Устройство для раздачи жидкости под давлением
Следующий патент: Способ очистки меламина
Случайный патент: Экранирующее устройство