Силовой аксоидный механизм
Номер патента: 482
Опубликовано: 26.08.1999
Авторы: Ким Флорид Борисович, Дон Евгений Алексеевич, Ким Леонид Борисович
Формула / Реферат
1. Силовой аксоидный механизм, содержащий промежуточное звено для передачи движения между соединенными с ним двумя концевыми элементами, оснащенными опорными поверхностями и выполненными с возможностью поступательных перемещений с усилиями и скоростями, отражающимися зависимостями:
P2=P1 (sin a 1/ sin a 2)+D P;
V2=V1 (cos a 1/cos a 2);
где Р2, P1 - усилия на концевых элементах;
V2, V1 - скорости перемещения концевых элементов;
a 2, a 1 - углы между плоскостью, проходящей через геометрические оси опорных поверхностей концевых элементов, и траекториями концевых элементов;
D Р - величина, учитывающая уменьшение силы из-за трения,
отличающийся тем, что промежуточное звено состоит, по меньшей мере, из одного контактного элемента с опорными поверхностями, которые как и опорные поверхности концевых элементов, выполнены и размещены так, что при перемещении одного концевого элемента обеспечивается их взаимное качение без проскальзывания с передачей усилий и движения другому концевому элементу, причем радиусы кривизны опорных поверхностей любой последовательности элементов, включая концевые, передающих движение, удовлетворяют условию:

где k - количество контактных элементов в данной последовательности элементов, передающей движение;
r (2j-1), r (2j) - радиусы кривизны опорных поверхностей в зоне j-того контакта.
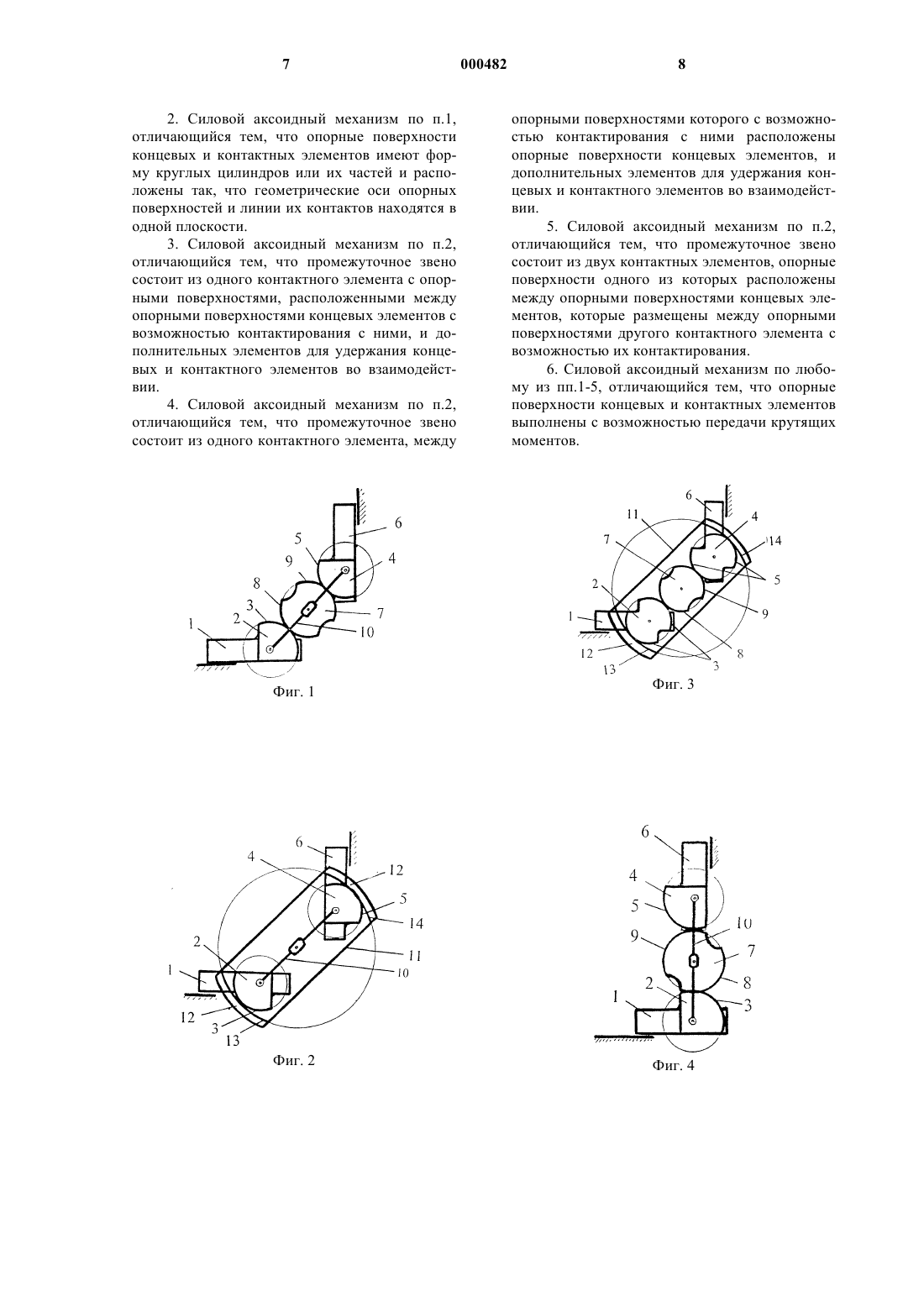
2. Силовой аксоидный механизм по п.1, отличающийся тем, что опорные поверхности концевых и контактных элементов имеют форму круглых цилиндров или их частей и расположены так, что геометрические оси опорных поверхностей и линии их контактов находятся в одной плоскости.
3. Силовой аксоидный механизм по п.2, отличающийся тем, что промежуточное звено состоит из одного контактного элемента с опорными поверхностями, расположенными между опорными поверхностями концевых элементов с возможностью контактирования с ними, и дополнительных элементов для удержания концевых и контактного элементов во взаимодействии.
4. Силовой аксоидный механизм по п.2, отличающийся тем, что промежуточное звено состоит из одного контактного элемента, между опорными поверхностями которого с возможностью контактирования с ними расположены опорные поверхности концевых элементов, и дополнительных элементов для удержания концевых и контактного элементов во взаимодействии.
5. Силовой аксоидный механизм по п.2, отличающийся тем, что промежуточное звено состоит из двух контактных элементов, опорные поверхности одного из которых расположены между опорными поверхностями концевых элементов, которые размещены между опорными поверхностями другого контактного элемента с возможностью их контактирования.
6. Силовой аксоидный механизм по любому из пп.1-5, отличающийся тем, что опорные поверхности концевых и контактных элементов выполнены с возможностью передачи крутящих моментов.

Текст
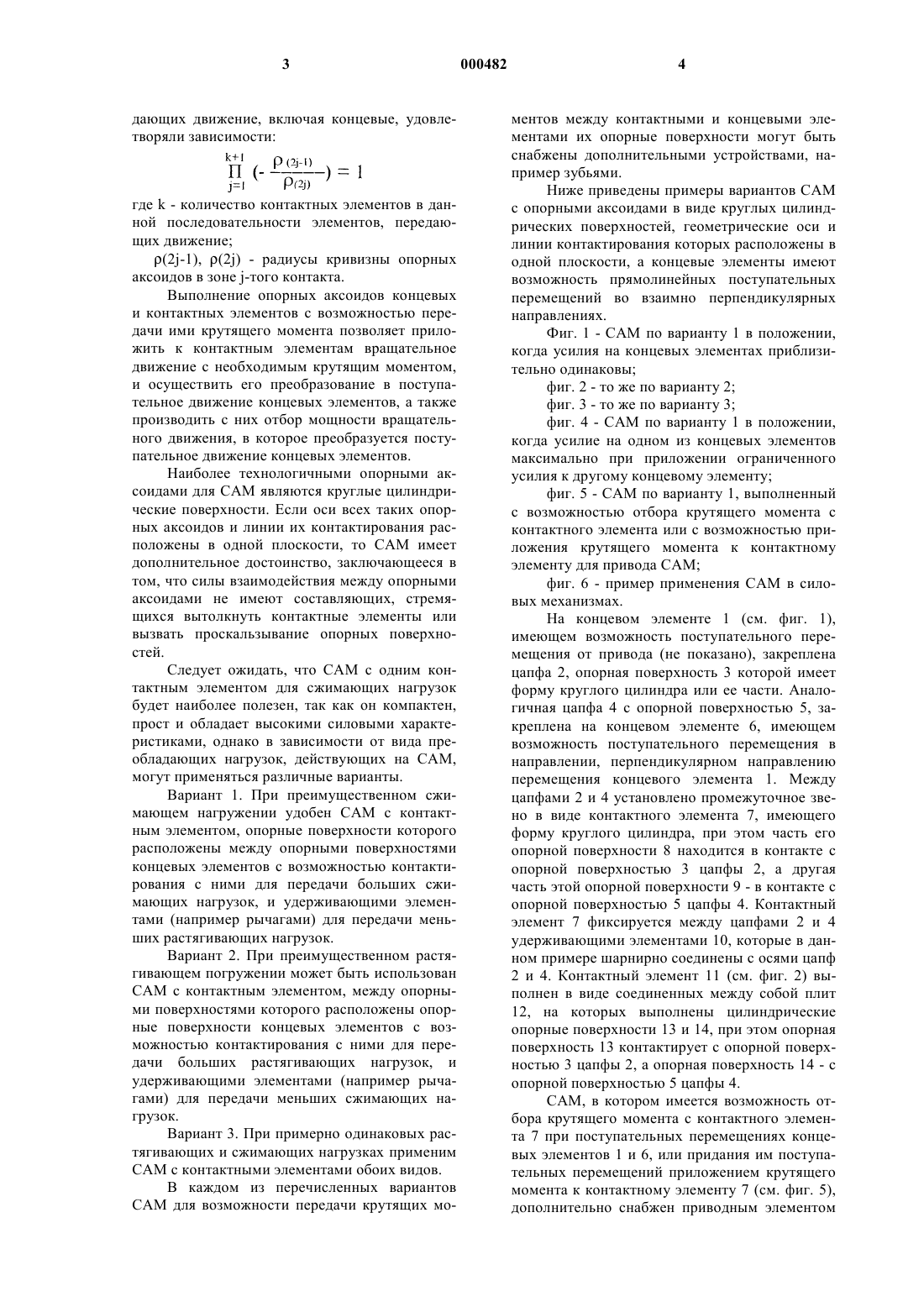
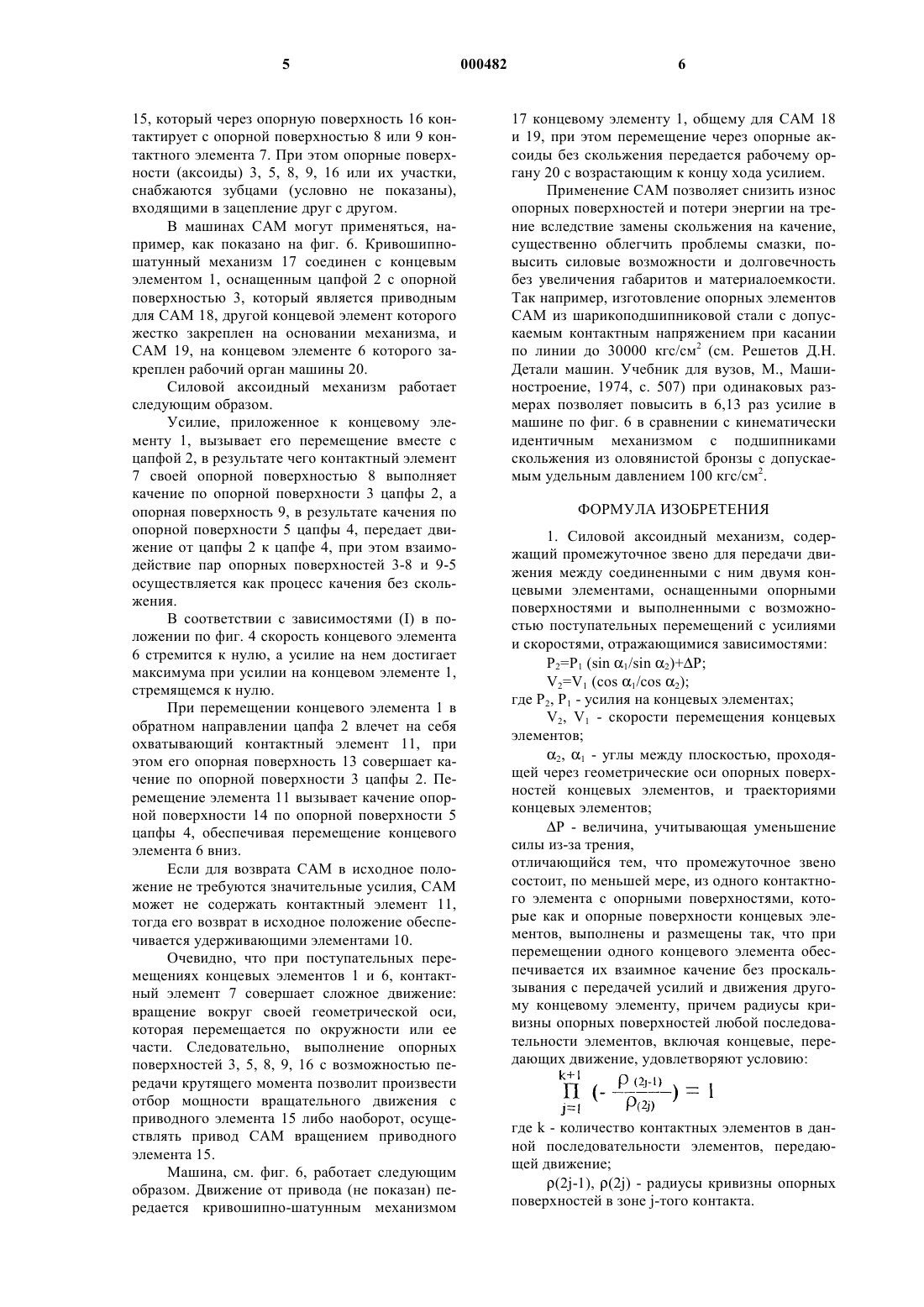
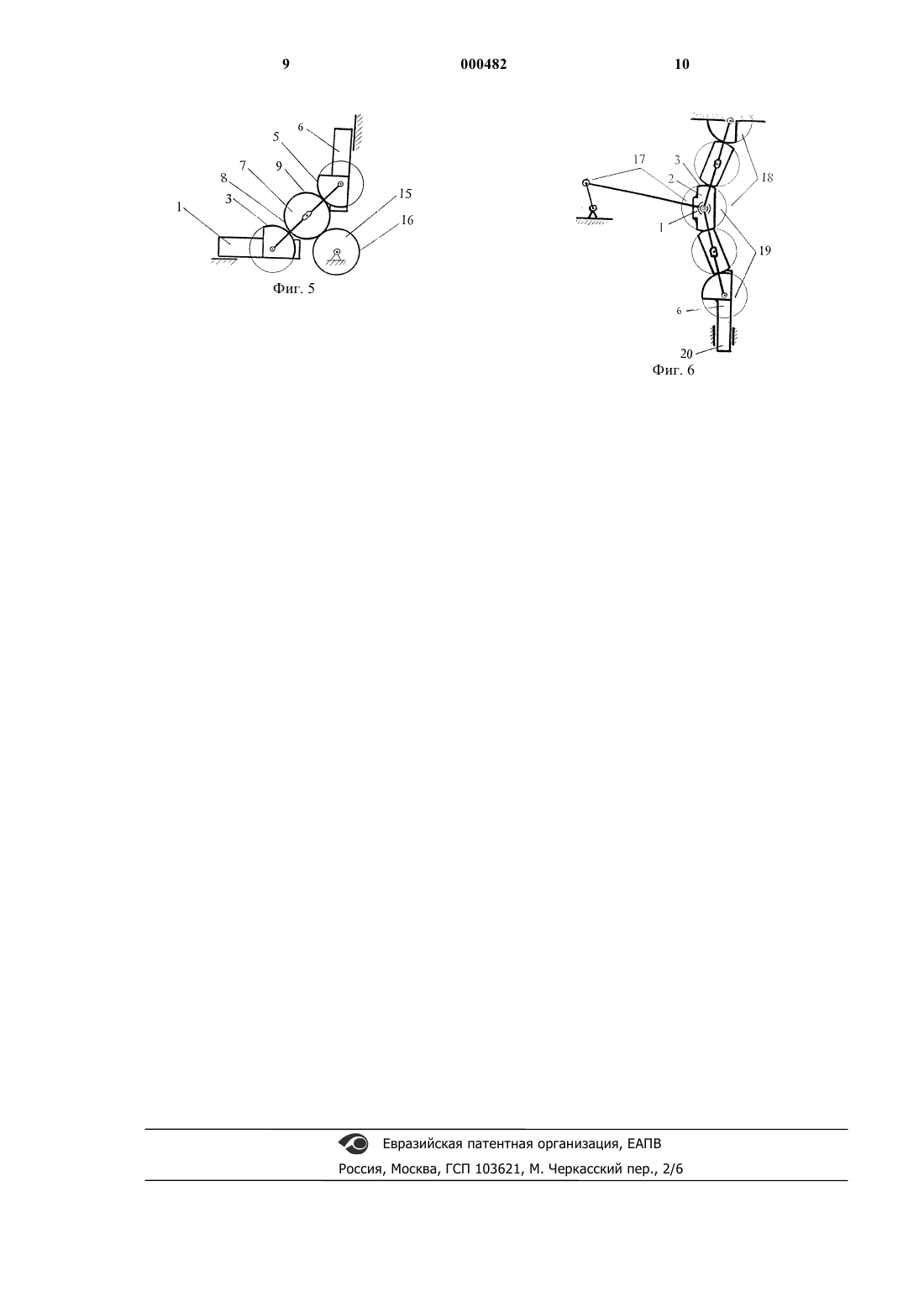
1 Изобретение относится к машиностроению, в частности к механизмам взаимного преобразования силовых и скоростных параметров вращательных и поступательных движений. В технике широко применяются рычажные механизмы, повышающие усилия за счет переменного в пределах цикла передаточного числа и осуществляющие взаимное преобразование поступательных и вращательных перемещений,например см. Артоболевский И.И. Теория механизмов и машин. М., Наука, 1975, с. 56-63. Известен рычажный механизм, см. Артоболевский И.И. Механизмы в современной технике. М., Наука, т. 2, 1979 г., с. 15, поз. 872, состоящий из промежуточного звена, шарнирно соединяющего два концевых элемента, имеющих возможность поступательных перемещений. В этом механизме скорости перемещения концевых элементов, усилия на них и угловая скорость поворота промежуточного звена определяются зависимостями:=V1/(L sin 1)=V2/(L sin 2),где P2, P1 - усилия на концевых элементах;V2, V1 - скорости перемещения концевых элементов; 2, 1 - углы, образованные плоскостью,проходящей через геометрические оси опорных поверхностей концевых элементов, и траекториями концевых элементов;P - величина, учитывающая уменьшение силы из-за трения;- угловая скорость поворота промежуточного звена. При этом в таком механизме можно уравновесить силы, действующие на концевые элементы, крутящим моментом, приложенным к промежуточному звену в соответствии с зависимостью:M+P1 L sin 1+P2 L sin 2+=0,где М - момент на промежуточном звене;- величина, учитывающая потери на трение, а остальные величины определены выше. Такой механизм, в котором по двум заданным величинам силовых параметров однозначно определяется третья величина, может применяться в качестве преобразователя поступательных и вращательных перемещений с взаимным преобразованием сил и моментов. Без учета потерь на трение, усилие на концевом элементе при определенном положении механизма может быть неограниченно велико при приложении ограниченного усилия к другому концевому элементу или ограниченного крутящего момента к промежуточному звену. Однако скольжение в нагруженных опорных поверхностях шарнирных узлов вызывает их интенсивный износ, потери на трение, затраты на поддержание надежности и существенно снижает силовые возможности механизма. Эти 2 недостатки обуславливают применение более совершенных антифрикционных материалов,сложных систем смазки, замену подшипников скольжения на подшипники качения. Но и при всем этом шарнирные соединения продолжают оставаться наиболее слабым местом таких механизмов. Целью настоящего изобретения является снижение потерь, повышение силовых и скоростных возможностей механизма взаимного преобразования вращательных и поступательных перемещений путем устранения трения скольжения в шарнирных соединениях. Анализ работы контактирующих пар концевых элементов и промежуточного звена в шарнирном соединении показывает, что нагрузки, растягивающие и сжимающие промежуточное звено (далее растягивающие и сжимающие нагрузки), воспринимаются соответствующими им характерными зонами пар опорных поверхностей концевых элементов и промежуточного звена, разделенными диаметральными плоскостями, перпендикулярными направлению действующих сил. Устранение скольжения в указанных зонах достигается инверсией каждой контактирующей пары опорных поверхностей таким образом,чтобы они совершали качение друг по другу без проскальзывания при взаимосвязанных поступательных перемещениях концевых элементов. При этом оси взаимного поворота промежуточного звена и концевых элементов переносятся в линии контакта опорных поверхностей и становятся мгновенными осями поворота. Так как геометрические места мгновенных осей поворота являются аксоидами, то контактирующие поверхности всех характерных зон превращаются в аксоиды, которые имеют возможность качения друг по другу без скольжения и воспринимать соответствующие нагрузки. Полученный в результате такой инверсии механизм назван "силовым аксоидным механизмом" (далее САМ). В соединениях САМ теоретически устраняется скольжение, вследствие чего значительно снижаются износ, потери на трение, чувствительность к смазке и в результате применения материалов с высокой контактной выносливостью, для которых антифрикционные свойства не являются важными, существенно расширяются силовые возможности и долговечность САМ. Промежуточное звено САМ может состоять из нескольких контактных элементов, которые могут быть размещены как параллельно, так и в виде их последовательности. Для того чтобы концевые элементы совершали поступательные перемещения без проскальзывания в опорных аксоидах необходимо,чтобы количество контактных элементов и радиусы кривизны опорных аксоидов любой последовательности контактных элементов, пере 3 дающих движение, включая концевые, удовлетворяли зависимости: где k - количество контактных элементов в данной последовательности элементов, передающих движение;(2j-1), (2j) - радиусы кривизны опорных аксоидов в зоне j-того контакта. Выполнение опорных аксоидов концевых и контактных элементов с возможностью передачи ими крутящего момента позволяет приложить к контактным элементам вращательное движение с необходимым крутящим моментом,и осуществить его преобразование в поступательное движение концевых элементов, а также производить с них отбор мощности вращательного движения, в которое преобразуется поступательное движение концевых элементов. Наиболее технологичными опорными аксоидами для САМ являются круглые цилиндрические поверхности. Если оси всех таких опорных аксоидов и линии их контактирования расположены в одной плоскости, то САМ имеет дополнительное достоинство, заключающееся в том, что силы взаимодействия между опорными аксоидами не имеют составляющих, стремящихся вытолкнуть контактные элементы или вызвать проскальзывание опорных поверхностей. Следует ожидать, что САМ с одним контактным элементом для сжимающих нагрузок будет наиболее полезен, так как он компактен,прост и обладает высокими силовыми характеристиками, однако в зависимости от вида преобладающих нагрузок, действующих на САМ,могут применяться различные варианты. Вариант 1. При преимущественном сжимающем нагружении удобен САМ с контактным элементом, опорные поверхности которого расположены между опорными поверхностями концевых элементов с возможностью контактирования с ними для передачи больших сжимающих нагрузок, и удерживающими элементами (например рычагами) для передачи меньших растягивающих нагрузок. Вариант 2. При преимущественном растягивающем погружении может быть использован САМ с контактным элементом, между опорными поверхностями которого расположены опорные поверхности концевых элементов с возможностью контактирования с ними для передачи больших растягивающих нагрузок, и удерживающими элементами (например рычагами) для передачи меньших сжимающих нагрузок. Вариант 3. При примерно одинаковых растягивающих и сжимающих нагрузках применим САМ с контактными элементами обоих видов. В каждом из перечисленных вариантов САМ для возможности передачи крутящих мо 000482 4 ментов между контактными и концевыми элементами их опорные поверхности могут быть снабжены дополнительными устройствами, например зубьями. Ниже приведены примеры вариантов САМ с опорными аксоидами в виде круглых цилиндрических поверхностей, геометрические оси и линии контактирования которых расположены в одной плоскости, а концевые элементы имеют возможность прямолинейных поступательных перемещений во взаимно перпендикулярных направлениях. Фиг. 1 - САМ по варианту 1 в положении,когда усилия на концевых элементах приблизительно одинаковы; фиг. 2 - то же по варианту 2; фиг. 3 - то же по варианту 3; фиг. 4 - САМ по варианту 1 в положении,когда усилие на одном из концевых элементов максимально при приложении ограниченного усилия к другому концевому элементу; фиг. 5 - САМ по варианту 1, выполненный с возможностью отбора крутящего момента с контактного элемента или с возможностью приложения крутящего момента к контактному элементу для привода САМ; фиг. 6 - пример применения САМ в силовых механизмах. На концевом элементе 1 (см. фиг. 1),имеющем возможность поступательного перемещения от привода (не показано), закреплена цапфа 2, опорная поверхность 3 которой имеет форму круглого цилиндра или ее части. Аналогичная цапфа 4 с опорной поверхностью 5, закреплена на концевом элементе 6, имеющем возможность поступательного перемещения в направлении, перпендикулярном направлению перемещения концевого элемента 1. Между цапфами 2 и 4 установлено промежуточное звено в виде контактного элемента 7, имеющего форму круглого цилиндра, при этом часть его опорной поверхности 8 находится в контакте с опорной поверхностью 3 цапфы 2, а другая часть этой опорной поверхности 9 - в контакте с опорной поверхностью 5 цапфы 4. Контактный элемент 7 фиксируется между цапфами 2 и 4 удерживающими элементами 10, которые в данном примере шарнирно соединены с осями цапф 2 и 4. Контактный элемент 11 (см. фиг. 2) выполнен в виде соединенных между собой плит 12, на которых выполнены цилиндрические опорные поверхности 13 и 14, при этом опорная поверхность 13 контактирует с опорной поверхностью 3 цапфы 2, а опорная поверхность 14 - с опорной поверхностью 5 цапфы 4. САМ, в котором имеется возможность отбора крутящего момента с контактного элемента 7 при поступательных перемещениях концевых элементов 1 и 6, или придания им поступательных перемещений приложением крутящего момента к контактному элементу 7 (см. фиг. 5),дополнительно снабжен приводным элементом 5 15, который через опорную поверхность 16 контактирует с опорной поверхностью 8 или 9 контактного элемента 7. При этом опорные поверхности (аксоиды) 3, 5, 8, 9, 16 или их участки,снабжаются зубцами (условно не показаны),входящими в зацепление друг с другом. В машинах САМ могут применяться, например, как показано на фиг. 6. Кривошипношатунный механизм 17 соединен с концевым элементом 1, оснащенным цапфой 2 с опорной поверхностью 3, который является приводным для САМ 18, другой концевой элемент которого жестко закреплен на основании механизма, и САМ 19, на концевом элементе 6 которого закреплен рабочий орган машины 20. Силовой аксоидный механизм работает следующим образом. Усилие, приложенное к концевому элементу 1, вызывает его перемещение вместе с цапфой 2, в результате чего контактный элемент 7 своей опорной поверхностью 8 выполняет качение по опорной поверхности 3 цапфы 2, а опорная поверхность 9, в результате качения по опорной поверхности 5 цапфы 4, передает движение от цапфы 2 к цапфе 4, при этом взаимодействие пар опорных поверхностей 3-8 и 9-5 осуществляется как процесс качения без скольжения. В соответствии с зависимостями (I) в положении по фиг. 4 скорость концевого элемента 6 стремится к нулю, а усилие на нем достигает максимума при усилии на концевом элементе 1,стремящемся к нулю. При перемещении концевого элемента 1 в обратном направлении цапфа 2 влечет на себя охватывающий контактный элемент 11, при этом его опорная поверхность 13 coвершает качение по опорной поверхности 3 цапфы 2. Перемещение элемента 11 вызывает качение опорной поверхности 14 по опорной поверхности 5 цапфы 4, обеспечивая перемещение концевого элемента 6 вниз. Если для возврата САМ в исходное положение не требуются значительные усилия, САМ может не содержать контактный элемент 11,тогда его возврат в исходное положение обеспечивается удерживающими элементами 10. Очевидно, что при поступательных перемещениях концевых элементов 1 и 6, контактный элемент 7 совершает сложное движение: вращение вокруг своей геометрической оси,которая перемещается по окружности или ее части. Следовательно, выполнение опорных поверхностей 3, 5, 8, 9, 16 с возможностью передачи крутящего момента позволит произвести отбор мощности вращательного движения с приводного элемента 15 либо наоборот, осуществлять привод САМ вращением приводного элемента 15. Машина, см. фиг. 6, работает следующим образом. Движение от привода (не показан) передается кривошипно-шатунным механизмом 6 17 концевому элементу 1, общему для САМ 18 и 19, при этом перемещение через опорные аксоиды без скольжения передается рабочему органу 20 с возрастающим к концу хода усилием. Применение САМ позволяет снизить износ опорных поверхностей и потери энергии на трение вследствие замены скольжения на качение,существенно облегчить проблемы смазки, повысить силовые возможности и долговечность без увеличения габаритов и материалоемкости. Так например, изготовление опорных элементов САМ из шарикоподшипниковой стали с допускаемым контактным напряжением при касании по линии до 30000 кгс/см 2 (см. Решетов Д.Н. Детали машин. Учебник для вузов, М., Машиностроение, 1974, с. 507) при одинаковых размерах позволяет повысить в 6,13 раз усилие в машине по фиг. 6 в сравнении с кинематически идентичным механизмом с подшипниками скольжения из оловянистой бронзы с допускаемым удельным давлением 100 кгс/см 2. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Силовой аксоидный механизм, содержащий промежуточное звено для передачи движения между соединенными с ним двумя концевыми элементами, оснащенными опорными поверхностями и выполненными с возможностью поступательных перемещений с усилиями и скоростями, отражающимися зависимостями:V2=V1 (cos 1/cos 2); где Р 2, P1 - усилия на концевых элементах;V2, V1 - скорости перемещения концевых элементов; 2, 1 - углы между плоскостью, проходящей через геометрические оси опорных поверхностей концевых элементов, и траекториями концевых элементов; Р - величина, учитывающая уменьшение силы из-за трения,отличающийся тем, что промежуточное звено состоит, по меньшей мере, из одного контактного элемента с опорными поверхностями, которые как и опорные поверхности концевых элементов, выполнены и размещены так, что при перемещении одного концевого элемента обеспечивается их взаимное качение без проскальзывания с передачей усилий и движения другому концевому элементу, причем радиусы кривизны опорных поверхностей любой последовательности элементов, включая концевые, передающих движение, удовлетворяют условию: где k - количество контактных элементов в данной последовательности элементов, передающей движение;(2j-1), (2j) - радиусы кривизны опорных поверхностей в зоне j-того контакта. 7 2. Силовой аксоидный механизм по п.1,отличающийся тем, что опорные поверхности концевых и контактных элементов имеют форму круглых цилиндров или их частей и расположены так, что геометрические оси опорных поверхностей и линии их контактов находятся в одной плоскости. 3. Силовой аксоидный механизм по п.2,отличающийся тем, что промежуточное звено состоит из одного контактного элемента с опорными поверхностями, расположенными между опорными поверхностями концевых элементов с возможностью контактирования с ними, и дополнительных элементов для удержания концевых и контактного элементов во взаимодействии. 4. Силовой аксоидный механизм по п.2,отличающийся тем, что промежуточное звено состоит из одного контактного элемента, между 8 опорными поверхностями которого с возможностью контактирования с ними расположены опорные поверхности концевых элементов, и дополнительных элементов для удержания концевых и контактного элементов во взаимодействии. 5. Силовой аксоидный механизм по п.2,отличающийся тем, что промежуточное звено состоит из двух контактных элементов, опорные поверхности одного из которых расположены между опорными поверхностями концевых элементов, которые размещены между опорными поверхностями другого контактного элемента с возможностью их контактирования. 6. Силовой аксоидный механизм по любому из пп.1-5, отличающийся тем, что опорные поверхности концевых и контактных элементов выполнены с возможностью передачи крутящих моментов.
МПК / Метки
МПК: F16H 21/16
Метки: силовой, механизм, аксоидный
Код ссылки
<a href="https://eas.patents.su/6-482-silovojj-aksoidnyjj-mehanizm.html" rel="bookmark" title="База патентов Евразийского Союза">Силовой аксоидный механизм</a>
Гидравлический механизм ударного действия
Номер патента: 173
Опубликовано: 29.10.1998
Автор: Жалдак Николай Иванович
МПК: E21C 3/20
Метки: действия, ударного, механизм, гидравлический
Формула / Реферат:
Гидравлический механизм ударного действия, содержащий корпус (1) с газовым аккумулятором (2) энергии и взводящую камеру (3), в которой расположен боёк (4) с головкой (5) и ступенчатый клапан (6), образующий своей наружной поверхностью и корпусом переливную полость (7), периодически связанную с взводящей камерой, отличающийся тем, что на внутренней поверхности корпуса между газовым аккумулятором (2) и переливной полостью (7) образована напорная...
Ударный механизм
Номер патента: 370
Опубликовано: 24.06.1999
Авторы: Абдраимов Эмиль Самудинович, Абдраимов Самудин
МПК: B25D 11/12
Формула / Реферат:
Ударный механизм, содержащий корпус, инструмент и кривошипно-рычажное устройство, включающее кривошип, шатун и коромысло, один конец которого шарнирно связан с опорой, а на другом конце укреплена ударная масса, отличающийся тем, что, с целью увеличения частоты и энергии удара, жестко закрепленная опора коромысла установлена относительно опоры кривошипа на расстоянии, определяемом из условия (L0-L1)+(L3-L2) или (L0-L2)+(L3-L1), где L1 -...
Запорный механизм для устройства с пружинным приводом
Номер патента: 418
Опубликовано: 24.06.1999
Авторы: Айхер Йоахим, Шира Михаэль, Форстер Рихард
МПК: B05B 11/00, A61M 15/00
Метки: устройства, механизм, пружинным, запорный, приводом
Формула / Реферат:
1. Нагруженный пружиной приводной механизм, в котором выходной элемент установлен с возможностью совершения линейного передвижения под воздействием смещения пружины между положением высвобождения и положением фиксации и в котором предусмотрен запорный элемент, который может быть перемещен в направлении, поперечном направлению движения выходного элемента в и из области перемещения упорного средства, которое связано с выходным элементом и в...
Режущий механизм
Номер патента: 140
Опубликовано: 29.10.1998
Авторы: Грэхам Энжель Клив, Скотт Гутселл Грэхам, Лоренс Айлинг Клив
МПК: B32B 31/00, B31D 1/02, B26D 3/08...
Формула / Реферат:
1. Режущий механизм для осуществления процессов резания на многослойной ленте (Т), при этом режущий механизм оснащён первым лезвием (102) и вторым лезвием (103), и первое лезвие (102) установлено так, что оно разрезает все слои многослойной ленты, и второе лезвие (103) установлено так, что оно разрезает один слой или несколько слоев многослойной ленты (Т), оставляя, по меньшей мере, один слой целым и что оно находится в продольном расстоянии от...
Механизм для преобразования возвратно-поступательного движения во вращательное и наоборот
Номер патента: 159
Опубликовано: 29.10.1998
Автор: Адахан Кармели
МПК: F04B 35/04, F01B 9/00, F16H 21/32...
Метки: преобразования, возвратно-поступательного, наоборот, механизм, движения, вращательное
Формула / Реферат:
1. Механизм для преобразования движения, устанавливаемый между ведущим устройством и ведомым устройством для того, чтобы вращательное движение в одном устройстве соответствовало возвратно-поступательному движению в другом устройстве, и содержащий: корпус; возвратно-поступательный элемент, установленный с возможностью возвратно-поступательного движения вдоль продольной оси и соединяемый первым концом с одним из указанных устройств; вращающийся...
Предыдущий патент: Колпачок для укупорки сосудов с жидкими средами
Следующий патент: Фосфатная композиция и ее применение
Случайный патент: Производные 6-циклобутил-1,5-дигидропиразоло[3,4-d]пиримидин-4-она и их применение в качестве ингибиторов pde9a