Управляющий механизм прерывателя электрической цепи
Формула / Реферат
1. Управляющий механизм прерывателя электрической цепи с изолирующим корпусом (46), защищающим пару контактов, неподвижный (34) и подвижный (36), причем подвижный контакт поддерживается контактным рычагом (12), приводимым в движение между замкнутым положением и разомкнутым положением механизмом (10), который содержит рукоятку (20), снабженную указателем (22), показывающим ее положение и/или режим работы, пластину (16) для приведения в действие опоры (11), поддерживающей контактный рычаг (12), причем пластина (16) установлена с возможностью вращения на оси (14) с угловым перемещением (a ), прерываемую механическую связь между пластиной (16) и стержнем (56), соединенным с рукояткой (20), приводимую в действие расцепителем (18), управляемым узлом для автоматического выключения для прерывания механической связи в случае аварии, приводящей к автоматическому выключению механизма (10), причем расцепитель (18) снабжен указателем (24), показывающим его положение и/или режим работы, отличающийся тем, что вращающийся вал (42) контактного рычага зафиксирован на корпусе (46) и проходит сквозь отверстие (62) пластины (16) с заданным сдвигом относительно оси (14), при этом пластина (16) снабжена ограничителем (70) движения, удаленным соответственно от вала (42) контактного рычага и от оси (14) пластины на расстояния, отличные друг от друга, причем разность этих расстояний допускает угол (b ) открытия контактного рычага (12), который больше углового перемещения (a ) пластины (16).
2. Управляющий механизм по п.1, отличающийся тем, что отверстие (62) для прохождения вала (42) через пластину (16) выполнено продолговатым для создания рычажного усилия на контактный рычаг (12) в направлении размыкания контактов (34, 36).
3. Управляющий механизм по п.2, отличающийся тем, что продолговатое отверстие (62) в пластине (16) расположено наклонно относительно заданного направления приложения рычажного усилия на контактный рычаг (12).
4. Управляющий механизм по любому из пп.1-3, отличающийся тем, что ось (14) пластины расположена между вращающимся валом (42) контактного рычага и подвижным контактом (36), а шарнирно соединенный вал (48) расцепителя расположен на пластине (16).

Текст
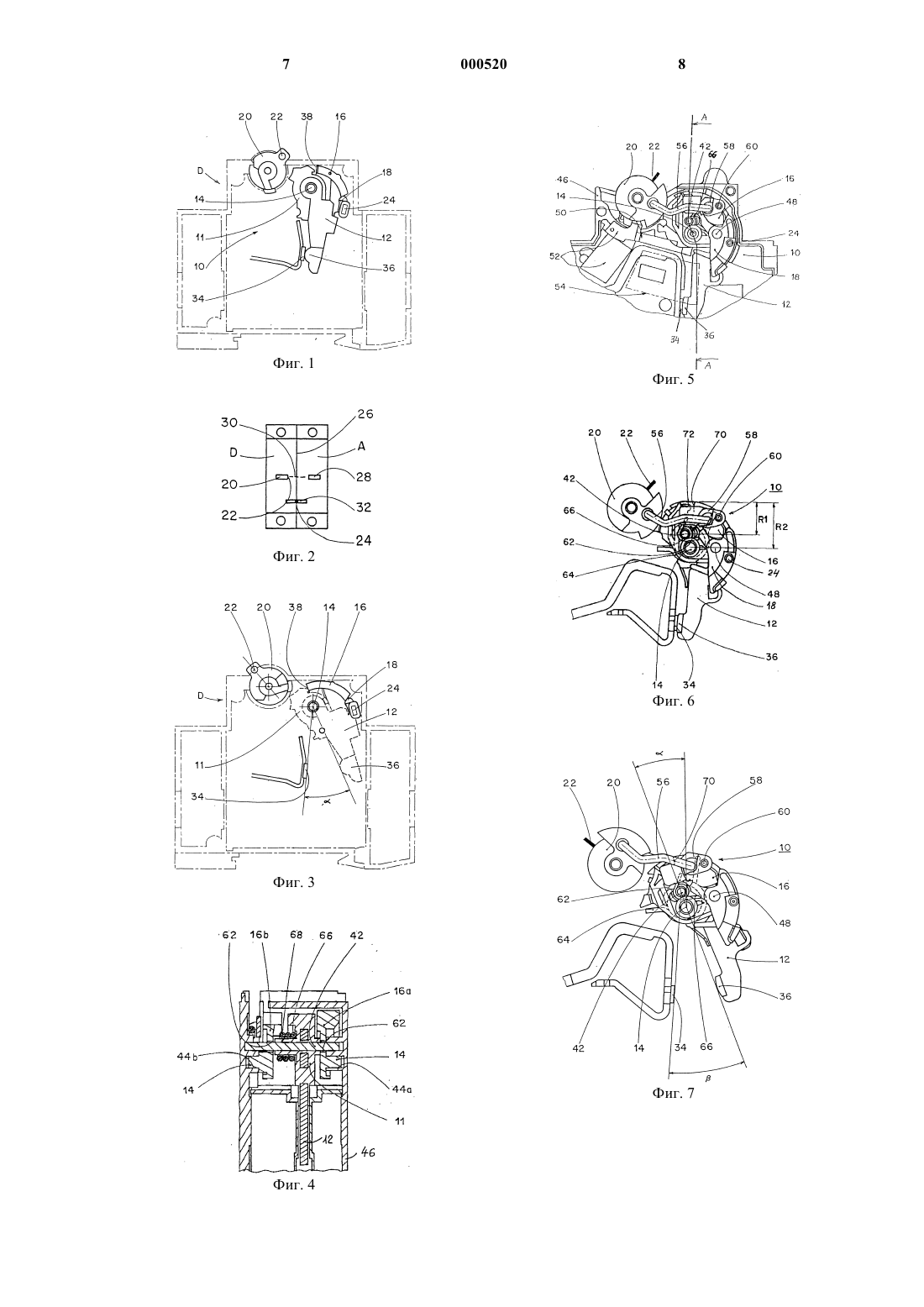
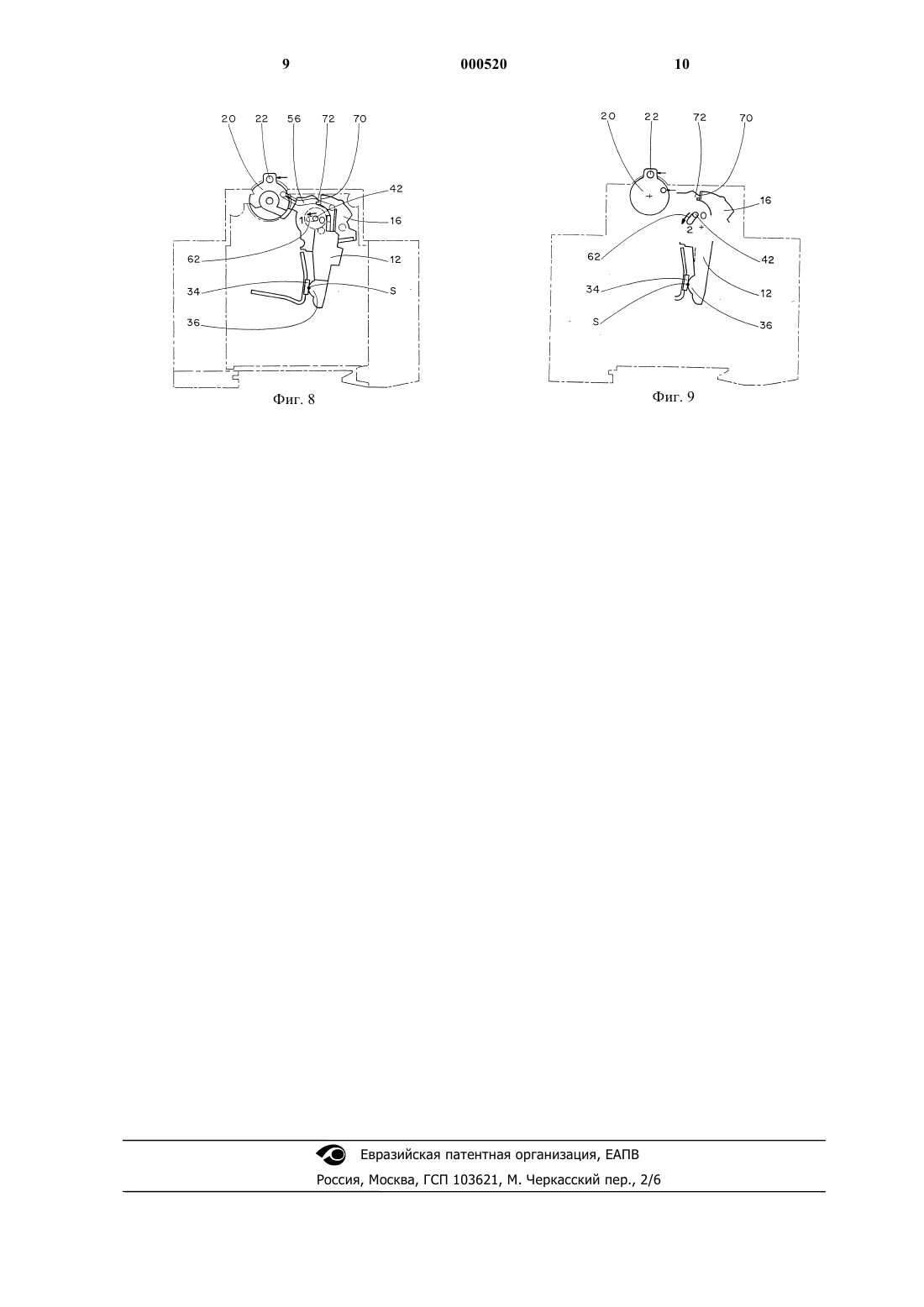
1 Изобретение относится к управляющему механизму прерывателя электрической цепи с изолирующим корпусом, защищающим пару контактов, неподвижного и подвижного, причем подвижный контакт, поддерживаемый контактным рычагом, приводится в движение между замкнутым положением и разомкнутым положением механизмов, который содержит рукоятку, снабженную указателем, показывающим ее положение и/или режим работы, пластину для приведения в действие опоры, поддерживающей контактный рычаг, причем пластина установлена с возможностью вращения на оси с угловым перемещением , прерываемую механическую связь между пластиной и стержнем, соединенным с рукояткой, связь приводится в действие расцепителем, управляемым узлом для автоматического выключения для прерывания механической связи в случае аварии, причем расцепитель снабжен указателем, показывающим его положение и/или режим работы. Из ЕР-А-295,158 известен механизм прерывателя D цепи, изображенный на фиг. 1-3. Механизм 10 содержит опору 11, поддерживающую подвижный контактный рычаг 12, который шарнирно закреплен на оси 14 вращающейся приводной пластины 16. Расцепитель 18 также шарнирно закреплен на пластине 16, но на валу, сдвинутом относительно оси 14. Соединительный стержень между рукояткой 20 и запирающей скобой на пластине 16 не изображен для большей ясности чертежа. Рукоятка 20 и расцепитель 18 соответственно содержат указатели 22 и 24, передающие информацию о положении и/или режиме работы рукоятки 20 и расцепителя 18 соответственно на дополнительные модули А. Дополнительные модули А могут быть выключающими или сигнальными модулями, которые могут быть размещены на большой боковой поверхности корпуса 26 прерывателя D цепи. На фиг. 2 указатель 22 рукоятки 20 прерывателя D цепи механически связан с рукояткой 28 дополнительного модуля А первой управляющей связью 30. Указатель 24 расцепителя механически связан с дополнительным модулем А второй управляющей связью 32. Первая управляющая связь 30 служит для передачи сигнала,указывающего замкнутое или разомкнутое состояние прерывателя D цепи, на дополнительный модуль А, когда последний образован сигнальным модулем OF. Двунаправленная вторая управляющая связь 32 служит для передачи в одном направлении сигнала, указывающего о выключении прерывателя D цепи, на дополнительный модуль А, когда последний образован сигнальным модулем SD ошибки, или для передачи в обратном направлении сигнала, указывающего команду выключения дополнительного модуля А, например, устройства защиты от утечки на землю, на прерыватель D цепи. 2 Работа механизма такого типа подробно описана в указанном документе ЕР-А-295,158. Когда контакты 34, 36 разделяются, упор 38 вращающейся пластины 16 двигает опору 11 по окружности вокруг оси 14. В разомкнутом положении (фиг. 3) угол открытия подвижного контактного рычага 12 соответствует в значительной мере угловому перемещению пластины 16 после того, как будет выбран зазор между упором 38 и опорой 11. Для того чтобы одинаковые дополнительные модули А могли быть еще использованы,необходим расширенный диапазон прерывателя цепи для соблюдения позиционирования и углового зазора указателей 22, 24 в различных рабочих состояниях, а именно, замкнутом, разомкнутом и расцепленном. Если центр шарнира опоры 11 располагается на оси 14 пластины 16, то угол открытия подвижного контакта 12 будет оставаться постоянным. Электрическая прочность прерывателя цепи такого типа прямо пропорциональна расстоянию, разделяющему контакты 34, 36 в разомкнутом состоянии, поэтому будет недостаточна для коммутационного устройства большой мощности. Задачей изобретения является создание механизма прерывателя цепи, имеющего увеличенную электрическую прочность без модификации кинематики указателей для встраивания вспомогательных модулей, независимо от режима работы - ручного или автоматического. Поставленная задача решается тем, что в управляющем механизме прерывателя электрической цепи с изолирующим корпусом, защищающим пару контактов, неподвижный и подвижный, причем подвижный контакт поддерживается контактным рычагом, приводимым в движение между замкнутым положением и разомкнутым положением механизмом, который содержит рукоятку, снабженную указателем,показывающим ее положение и/или режим работы, пластину для приведения в действие опоры, поддерживающей контактный рычаг, причем пластина установлена с возможностью вращения на оси с угловым перемещением , прерываемую механическую связь между пластиной и стержнем, соединенным с рукояткой, указанная механическая связь приводится в действие расцепителем, управляемым узлом для автоматического выключения для прерывания механической связи в случае аварии, приводящей к автоматическому выключению механизма(10), причем расцепитель снабжен указателем,показывающим его положение и/или режим работы, согласно изобретению вращающийся вал контактного рычага зафиксирован на корпусе и проходит сквозь отверстие пластины с заданным сдвигом относительно оси, при этом пластина снабжена ограничителем движения, удаленным соответственно от вала контактного рычага и от оси пластины на расстояния, отличные друг от друга, причем разность этих рас 3 стояний допускает уголоткрытия контактного рычага, который больше углового перемещенияпластины. В управляющем механизме согласно изобретению отверстие для прохождения вала через пластину выполнено продолговатым для создания рычажного усилия на контактный рычаг в направлении размыкания контактов. В управляющем механизме согласно изобретению продолговатое отверстие в пластине расположено наклонно относительно заданного направления приложения рычажного усилия на контактный рычаг. В управляющем механизме согласно изобретению ось пластины расположена между вращающимся валом контактного рычага и подвижным контактом, а шарнирно соединенный вал расцепителя расположен на пластине. В дальнейшем изобретение поясняется описанием варианта воплощения, данным в виде не ограничивающего изобретения примера,со ссылками на сопроводительные чертежи, на которых: фиг. 1 изображает схематический вертикальный вид известного механизма прерывателя цепи, контакты которого изображены в замкнутом состоянии; фиг. 2 - в уменьшенном масштабе конструкцию прерывателя цепи, изображенного на фиг. 1, с дополнительным модулем, а именно выключающим или сигнальным модулем; фиг. 3 - вид, идентичный виду на фиг. 1, с контактами, изображенными в разомкнутом состоянии; фиг. 4 - вид в разрезе механизма согласно изобретению по линии А-А на фиг. 5; фиг. 5 - частичную вертикальную проекцию механизма согласно изобретению после удаления части изолирующего корпуса; фиг. 6 - вертикальную проекцию механизма согласно изобретению без нижней и верхней части изолирующего корпуса; фиг. 7 - вид, аналогичный виду на фиг. 6,причем механизм представлен с контактами в разомкнутом состоянии; фиг. 8 - схематический вид механизма согласно фиг. 6 после попытки выполнить ручное размыкание после соединения контактов; фиг. 9 - вид, идентичный виду на фиг. 8 альтернативного варианта воплощения. На фиг. 4-7 одинаковые позиции используются для обозначения частей, идентичных частям механизма, изображенных на фиг. 1-3. Механизм 10 снабжен подвижным контактным рычагом 12 с большим угломоткрытия, получаемым посредством децентрирования вала 42 относительно оси 14 пластины 16. Пластина 16 образуется парой элементов 16 а, 16b, каждая из которых имеет ось 14, входящую в зацепление с опорными поверхностями 44 а, 44b изолирующего корпуса 46. Расцепитель 4 18 смонтирован с возможностью вращения на оси 48 пластины 16 и может быть переведен в расцепленное положение посредством воздействия на него расцепляющего стержня 50, приводимого в действие поворотным якорем 52 электромагнитного расцепляющего устройства 54. Указатель 24 представляет собой удлинитель расцепителя 18, который выполнен в виде двухходовой второй управляющей связи 32(фиг. 2) и в одном направлении указывает на расцепление прерывателя D цепи относительно дополнительного модуля А, когда последний представлен отказавшим модулем SD сигнализации, или в противоположном направлении указывает на порядок отключения дополнительного модуля А, например, узла защиты от утечек на землю, которое осуществляется прерывателем D цепи. Механическая связь между пластиной 16 и стержнем 56 представляет собой запирающий крючок 58, шарнирно установленный на оси 60 пластины 16. В случае возникновения неисправности расцепитель 18, воздействуя своим плечом на запирающий крючок 58, заставляет его прервать механическую связь (см. описание к ЕР-295 158). Вращающийся вал 42 подвижного контактного рычага 12 проходит через продолговатое отверстие 62 каждого из элементов 16 а, 16b пластины 16 и поддерживается на опорах,имеющихся на противоположных поверхностях корпуса 46. Отверстие 62 каждого элемента 16 а,16b пластины 16 сдвинуто относительно оси 14 и оси 48 шарнирного соединения, ось 14 расположена между вращающимся валом 42 контактного рычага 12 и подвижным контактом 36. Первая пружина 64 для приведения пластины 1 в разомкнутое положение содержит скрученную пружину, окружающую ось 14. Один концевой виток пружины 64 зафиксирован на пластине 16, а противоположный виток зацепляется с фиксированным упором корпуса 46. Вторая пружина 66 для давления на контакт находится на выступе 68 опоры 11 и окружает вращающийся вал 42. Эта пружина 66 создает относительное крутящее движение между пластиной 16 и опорой 11 и заставляет последнюю перейти в замкнутое состояние для обеспечения заданного давления контакта неподвижным контактом 34. Пластина 16 имеет ограничитель 70 движения для приведения в зацепление с опорной поверхностью 72 опоры 11 для перемещения подвижного контакта 36 в разомкнутое положение. Расстояние R1 между валом 42 контактного рычага 12 и ограничителем движения 70 меньше, чем расстояние R2 между осью 14 пластины 16 и тем же ограничителем 70 движения. Размыкание контактов 34, 36 имеет место после движения пластины 16 в открытое положение, которое может быть достигнуто вручную 5 посредством рукоятки 20 или автоматически с последующим выключением после обнаружения аварии. В обоих случаях ограничитель движения 70 зацепляет опорную поверхность 72 опоры 11 и двигает последнюю по окружности для перевода контактов 34, 36 (фиг. 7) в разомкнутое положение. Разность расстояний R1 и R2 дает увеличение углаоткрытия контактного рычага 12, в то время как пластина 16 выполняет стандартное вращающееся движение по соответствующему пути, изображенному на фиг. 3. Усиленное воздействие открывающего движения контактного рычага 12 дает возможность получить большее изолирующее расстояние, в то время как угол поворота пластины 16 остается пригодным для кинематики указателей 22, 24. Рычаг 12 подвижного контакта имеет с помощью рукоятки 20 и расцепителя 18 широкий угол открытия , получаемый за счет эксцентричного расположения вала 42 по отношению к оси 14 приводной пластины 16. Как изображено на фиг. 8, когда сделана попытка открыть с помощью рукоятки 20, вал 42 в продольном отверстии 62 корпуса 46 вызывает рычажное усилие,воздействующее на подвижный контактный рычаг 12, который вызывает отрыв контактов 34, 36 из соединенного состояния последних в точке S. Вращающийся вал 42 в нормальном состоянии прижат пружиной 66 к правому концу продолговатого отверстия 62. Из соединенного состояния контактов 34, 36 движение рукоятки 20 в открытое положение вызывает слабое поднимающее движение контактного рычага 12 и движения вала 42 влево в отверстии 62 от начального положения 0 в первое положение 1. Согласно альтернативному варианту воплощения, изображенному на фиг. 9, наклонное расположение отверстия 62 дает возможность получения усилия сдвига на уровне соединенияS дополнительно к рычажному усилию, с последующим движением вала 42 от начального положения 0 во второе положение 2. Это усилие сдвига, более того, вызывает скольжение подвижного контакта 36 относительно неподвижного контакта 34, делая возможным самоочистку контактов. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Управляющий механизм прерывателя электрической цепи с изолирующим корпусом 6 ный (34) и подвижный (36), причем подвижный контакт поддерживается контактным рычагом(12), приводимым в движение между замкнутым положением и разомкнутым положением механизмом (10), который содержит рукоятку (20),снабженную указателем (22), показывающим ее положение и/или режим работы, пластину (16) для приведения в действие опоры (11), поддерживающей контактный рычаг (12), причем пластина (16) установлена с возможностью вращения на оси (14) с угловым перемещением ,прерываемую механическую связь между пластиной (16) и стержнем (56), соединенным с рукояткой (20), приводимую в действие расцепителем (18), управляемым узлом для автоматического выключения для прерывания механической связи в случае аварии, приводящей к автоматическому выключению механизма (10), причем расцепитель (18) снабжен указателем (24),показывающим его положение и/или режим работы, отличающийся тем, что вращающийся вал(42) контактного рычага зафиксирован на корпусе (46) и проходит сквозь отверстие (62) пластины (16) с заданным сдвигом относительно оси (14), при этом пластина (16) снабжена ограничителем (70) движения, удаленным соответственно от вала (42) контактного рычага и от оси (14) пластины на расстояния, отличные друг от друга, причем разность этих расстояний допускает уголоткрытия контактного рычага(12), который больше углового перемещенияпластины (16). 2. Управляющий механизм по п.1, отличающийся тем, что отверстие (62) для прохождения вала (42) через пластину (16) выполнено продолговатым для создания рычажного усилия на контактный рычаг (12) в направлении размыкания контактов (34, 36). 3. Управляющий механизм по п.2, отличающийся тем, что продолговатое отверстие(62) в пластине (16) расположено наклонно относительно заданного направления приложения рычажного усилия на контактный рычаг (12). 4. Управляющий механизм по любому из пп.1-3, отличающийся тем, что ось (14) пластины расположена между вращающимся валом(42) контактного рычага и подвижным контактом (36), а шарнирно соединенный вал (48) расцепителя расположен на пластине (16).
МПК / Метки
МПК: H01H 71/00
Метки: цепи, прерывателя, механизм, управляющий, электрической
Код ссылки
<a href="https://eas.patents.su/6-520-upravlyayushhijj-mehanizm-preryvatelya-elektricheskojj-cepi.html" rel="bookmark" title="База патентов Евразийского Союза">Управляющий механизм прерывателя электрической цепи</a>
Устройство для деионизации газов, в частности, образующихся при размыкании в дугогасительной камере низковольтного прерывателя цепи в литом корпусе
Номер патента: 443
Опубликовано: 26.08.1999
Авторы: Бонент Серж, Риваль Марк, Клери Ив, Килинджиан Кристофор
МПК: H01H 73/18
Метки: размыкании, деионизации, прерывателя, литом, дугогасительной, цепи, образующихся, частности, газов, камере, низковольтного, устройство, корпусе
Формула / Реферат:
1. Устройство для деионизации газов, содержащее пористый экран, расположенный вблизи выходного отверстия дугогасительной камеры низковольтного прерывателя цепи для охлаждения образующихся при размыкании газов, появляющихся при размыкании контактов после размыкания прерывателя цепи, и выполненный в виде ткани, образованной прямыми и волнистыми проволочными нитями, образующими перекрестную структуру, отличающееся тем, что волнистые проволочные...
Выключатель для электрической цепи
Номер патента: 21
Опубликовано: 30.12.1997
Авторы: Собуль Раймон, Рафар Дени
МПК: H01H 33/18
Метки: цепи, выключатель, электрической
Формула / Реферат:
1. Выключатель для электрической цепи средней величины напряжения, помещенный в изолированный корпус (12), наполненный газом с высоким диэлектрическим сопротивлением, и содержащий контейнер (43) в форме камеры (34) гашения электрической дуги с самогасящим расширением, содержащий неподвижный дуговой контакт (36), взаимодействующий с подвижным дуговым контактом (38), - электромагнитную катушку (122), расположенную вокруг неподвижного дугового...
Способ сборки цепи и заклепка, предназначенная для использования в такой сборке
Номер патента: 372
Опубликовано: 24.06.1999
Автор: Трэвис Томас Н.Р.
МПК: B27B 33/14
Метки: использования, сборки, предназначенная, цепи, способ, сборке, заклепка
Формула / Реферат:
1. Заготовка заклепки для взаимного соединения двух боковых звеньев и центрального звена пильной цепи, отличающаяся тем, что она включает в себя центральный фланец (33), главным образом, цилиндрической формы, идущий вдоль центральной оси заклепки, и два барабана, предназначенные для их расклепывания и деформирования с заполнением при этом отверстий соответствующих боковых звеньев пильной цепи, причем барабаны выступают наружу с противоположных...
Силовой аксоидный механизм
Номер патента: 482
Опубликовано: 26.08.1999
Авторы: Ким Флорид Борисович, Ким Леонид Борисович, Дон Евгений Алексеевич
МПК: F16H 21/16
Метки: аксоидный, механизм, силовой
Формула / Реферат:
1. Силовой аксоидный механизм, содержащий промежуточное звено для передачи движения между соединенными с ним двумя концевыми элементами, оснащенными опорными поверхностями и выполненными с возможностью поступательных перемещений с усилиями и скоростями, отражающимися зависимостями: P2=P1 (sin a 1/ sin a 2)+D P; V2=V1 (cos a 1/cos a 2); где Р2, P1 - усилия на концевых элементах; V2, V1 - скорости перемещения концевых элементов; a 2, a 1...
Сигарета и нагреватель для использования в электрической курительной системе
Номер патента: 244
Опубликовано: 25.02.1999
Авторы: Уль Ричард Дж., Шарп Дэвид Е., Хаджалигол Мохаммад Р., Ренн Сьюзн Е., Бэджит Джеймс Д.Мл., Николс Вальтер А., Хаук Вилли Дж.Мл., Ваткинс Майкл Л., Каулинг Патрик С., Каунтс Мэри Эллен, Флейшхауэр Грир С., Хэйес Патрик Х., Мур Майкл А., Сандерсон Весли Дж., Морган Констанс Х., Кларк Дэвид А.
МПК: A24F 47/00
Метки: использования, электрической, нагреватель, сигарета, системе, курительной
Формула / Реферат:
1. Сигарета (23), содержащая табачный стержень, включающий трубчатую табачную пластинку (66) и штранг из табака (80), расположенный внутри трубчатой табачной пластинки, упомянутый табачный стержень имеет свободный конец (78) и противоположный конец (72), а трубчатая табачная пластинка содержит основную пластинку (68) и слой (70) табачного ароматического материала, поддерживаемого основной пластинкой, которая приспособлена для переноса тепла от...
Предыдущий патент: Антенная система с линейной зоной перекрытия для системы связи множественного доступа с кодовым разделением каналов
Следующий патент: Способ получения гомо- или сополимеров пропилена.
Случайный патент: Способ получения эзетимиба и промежуточных продуктов, используемых в этом способе