Мобильный рабочий агрегат с опорными консолями
Формула / Реферат
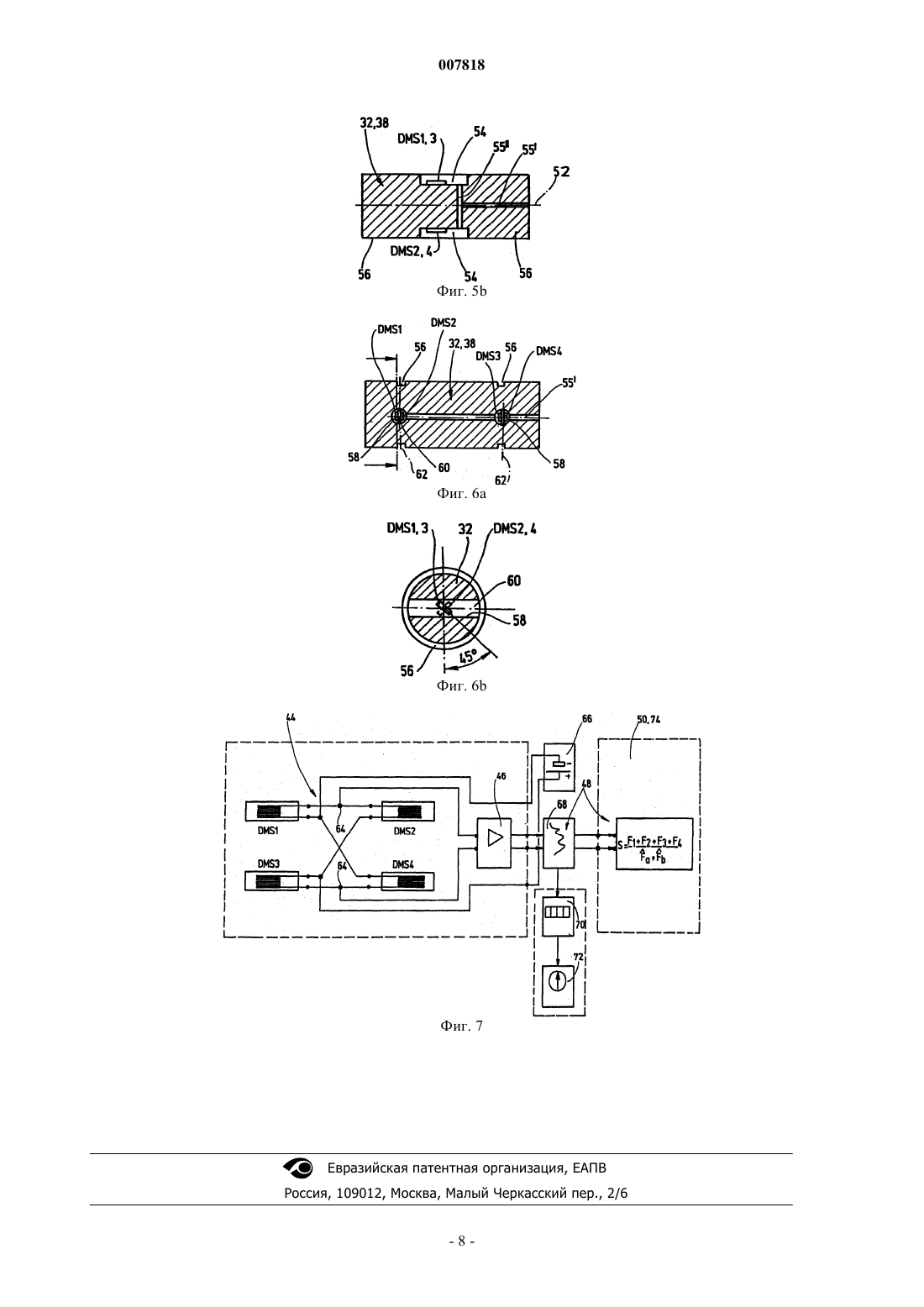
1. Мобильный рабочий агрегат, в частности автобетононасос, с шасси (10), с двумя передними и двумя задними, выполненными с возможностью выдвигания из транспортного положения по меньшей мере в одно опорное положение опорными консолями (22, 24), выполненными с возможностью опирания посредством соответствующей телескопической опорной ноги (28) на грунт (36), и с соответствующим измерительным элементом (38) для определения опорного усилия в каждой опорной ноге (28), причем телескопические опорные ноги (28) своим стационарным относительно консоли телескопическим звеном (30) посредством поворотного болта (32) шарнирно соединены с коробом (26) опорной ноги, и поворотный болт (32) выполнен в виде измерительного элемента (38) для определения нагрузки на опору, отличающийся устройством для определения возникающего в процессе опирания упругого изгиба поворотного болта (32) как меры, отнесенной к опорной ноге нагрузки на опору, причем поворотный болт (32) содержит два противолежащих друг другу относительно плоскости (52) изгиба, открытых на противоположных сторонах продольных паза (54) для приема, соответственно, двух тензорезисторов (DMS1, DMS3 или, соответственно, DMS2, DMS4), а присоединения тензорезисторов связаны друг с другом в измерительной схеме (44), выполненной в виде мостовой схемы.
2. Рабочий агрегат по п.1, отличающийся тем, что поворотный болт (32) содержит открытое с одной стороны центральное отверстие (55'), а также проходящее по меньшей мере от одного продольного паза (54) к центральному отверстию поперечное отверстие (55'') для приема измерительного кабеля.
3. Мобильный рабочий агрегат, в частности автобетононасос, с шасси (10), с двумя передними и двумя задними, выполненными с возможностью выдвигания из транспортного положения по меньшей мере в одно опорное положение опорными консолями (22, 24), выполненными с возможностью опирания посредством соответствующей телескопической опорной ноги (28) на грунт (36), и с соответствующим измерительным элементом (38) для определения опорного усилия в каждой опорной ноге (28), причем телескопические опорные ноги (28) своим стационарным относительно консоли телескопическим звеном (30) посредством поворотного болта (32) шарнирно соединены с коробом (26) опорной ноги, и поворотный болт (32) выполнен в виде измерительного элемента (38) для определения нагрузки на опору, отличающийся устройством для определения возникающей в процессе опирания в области опорных участков (56) поворотного болта (32) упругой деформации сдвига как меры, отнесенной к опорной ноге нагрузки на опору, причем поворотный болт (32) содержит в области опорных участков (56) по меньшей мере одно ориентированное в направлении опирания сквозное отверстие (58), в котором расположена связанная с материалом болта мембрана (60), которая несет по меньшей мере один тензорезистор (DMS1-DMS4).
4. Рабочий агрегат по п.3, отличающийся тем, что мембрана связана за одно целое с материалом болта.
5. Рабочий агрегат по п.3 или 4, отличающийся тем, что поворотный болт (32) в обоих опорных участках (56) содержит по одному сквозному отверстию (58) с мембраной (60), причем мембрана расположена в плоскости (62) сдвига между внутренней и внешней опорой опорной ноги (28).
6. Рабочий агрегат по п.5, отличающийся тем, что на обеих противоположных друг другу поверхностях широких граней мембраны (60) расположены, соответственно, проходящие параллельно плоскости (62) сдвига тензорезисторы (DMS1-DMS4), и что тензорезисторы связаны друг с другом в измерительной схеме (44), преимущественно выполненной в виде мостовой схемы.
7. Рабочий агрегат по любому из пп.3-6, отличающийся тем, что расположенные на обеих поверхностях широких граней мембраны (60) тензорезисторы ориентированы наклонно к направлению опирания.
8. Рабочий агрегат по п.7, отличающийся тем, что расположенные на обеих поверхностях широких граней мембраны тензорезисторы (DMS1-DMS4) попарно пересекаются друг с другом под углом от 45 до 90ш.
9. Рабочий агрегат по любому из пп.1, 2 или 6-8, отличающийся тем, что измерительная схема (44) присоединяется через усилитель сигналов (46), выполненный в виде операционного усилителя, к компьютеризированному блоку (48, 50) обработки результатов.
10. Рабочий агрегат по любому из пп.1-9, отличающийся тем, что поворотный болт (32) на выступающей из короба опорной части ноги несет корпус (76) для приема блока (44, 68) измерения и обработки результатов.
11. Рабочий агрегат по п.9 или 10, отличающийся тем, что блок (48, 50) обработки результатов имеет программное обеспечение для определения коэффициента (S) устойчивости из отношения общей суммы измеренных значений нагрузок на опору всех опорных ног к частичной сумме измеренных значений нагрузок на опору обеих в данный момент наиболее нагруженных опорных ног, а также аварийную программу для аварийного срабатывания при недостижении предварительно заданной пороговой величины для коэффициента устойчивости.
12. Рабочий агрегат, в частности автобетононасос, с шасси (10), с двумя передними и двумя задними, выполненными с возможностью выдвигания из транспортного положения по меньшей мере в одно опорное положение опорными консолями (22, 24), выполненными с возможностью опирания посредством соответствующей телескопической опорной ноги (28) на грунт (36), и с соответствующим измерительным элементом (38) для определения опорного усилия в каждой опорной ноге (28), и с устройством для контроля устойчивости, которое включает в себя блок (68, 74) обработки результатов, на который в заданные циклы измерения могут подаваться отнесенные к опорной ноге измеренные значения нагрузок на опору, отличающийся программным обеспечением для определения коэффициента (S) устойчивости из отношения общей суммы измеренных значений нагрузок на опору всех опорных ног (28) к частичной сумме измеренных значений нагрузок на опору обеих в данный момент наиболее нагруженных опорных ног (28), а также аварийную программу для аварийного срабатывания при недостижении предварительно заданной пороговой величины для коэффициента устойчивости.
13. Рабочий агрегат по п.11 или 12, отличающийся тем, что обеспечивающая аварийное срабатывание пороговая величина лежит между 1,05 и 1,25.
14. Рабочий агрегат по любому из пп.11-13, отличающийся тем, что несколько ступенчатых пороговых величин (S1, S2, S3) для устойчивости являются обеспечивающими аварийное срабатывание.
15. Рабочий агрегат по п.14, отличающийся тем, что при недостижении первой пороговой величины (S1) может подаваться акустический и/или оптический сигнал.
16. Рабочий агрегат по п.15, отличающийся тем, что при недостижении второй по сравнению с первой, более низкой пороговой величины (S2) может включаться снимаемая блокировка перемещающего груз рабочего движения.
17. Рабочий агрегат по п.16, отличающийся тем, что при недостижении третьей по сравнению со второй, более низкой пороговой величины (S3) может включаться неснимаемая блокировка перемещающего груз рабочего движения.


Текст
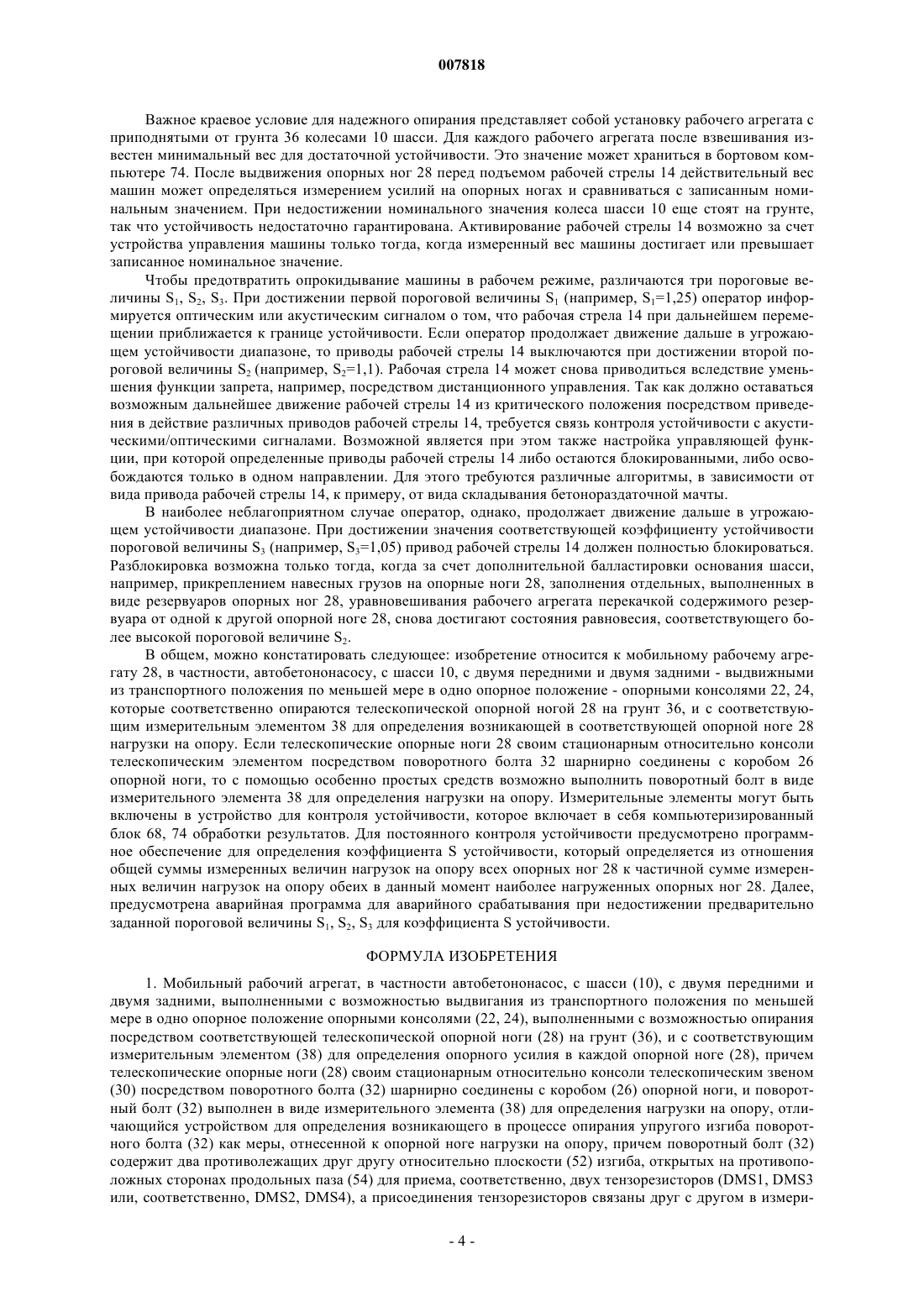
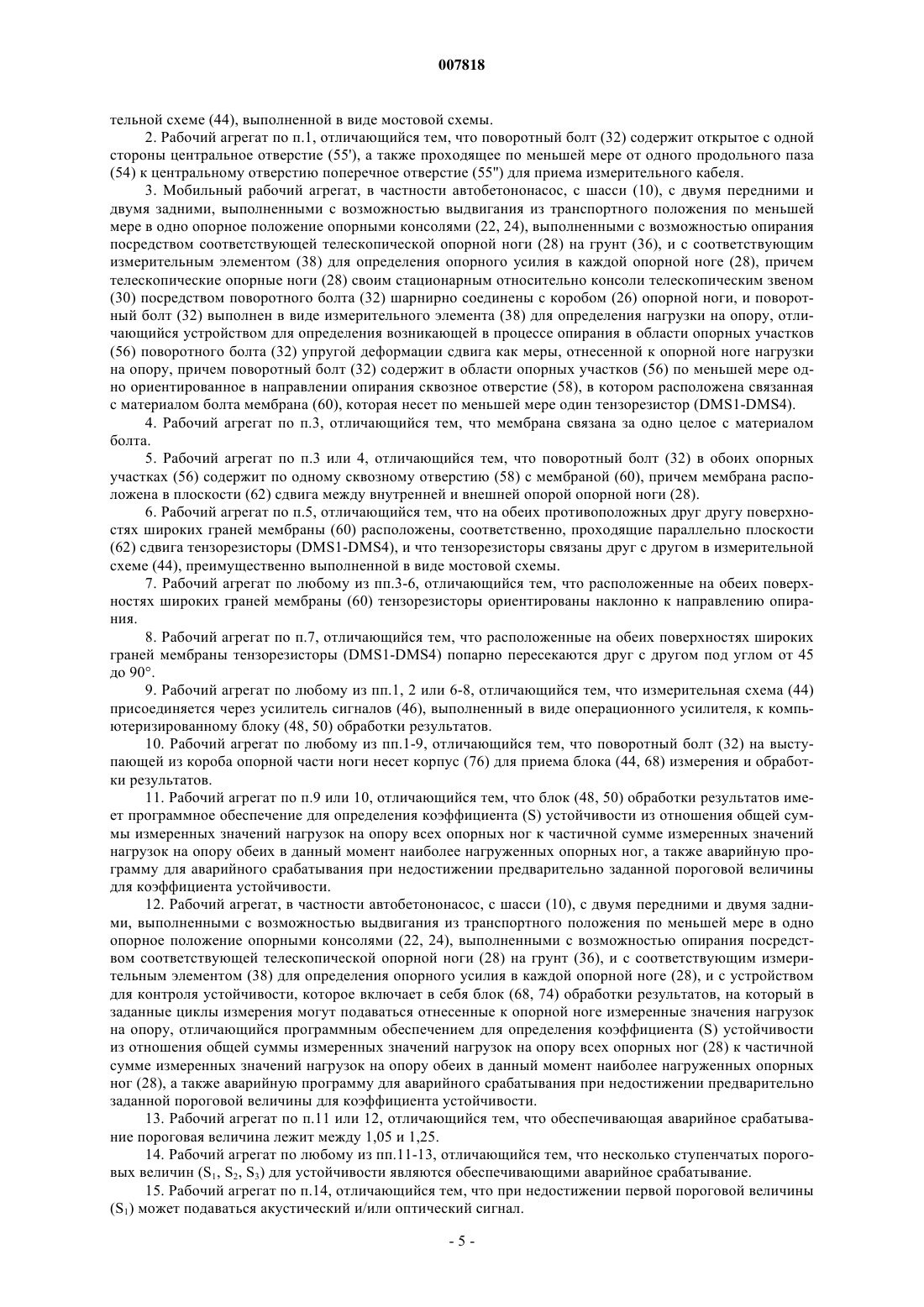
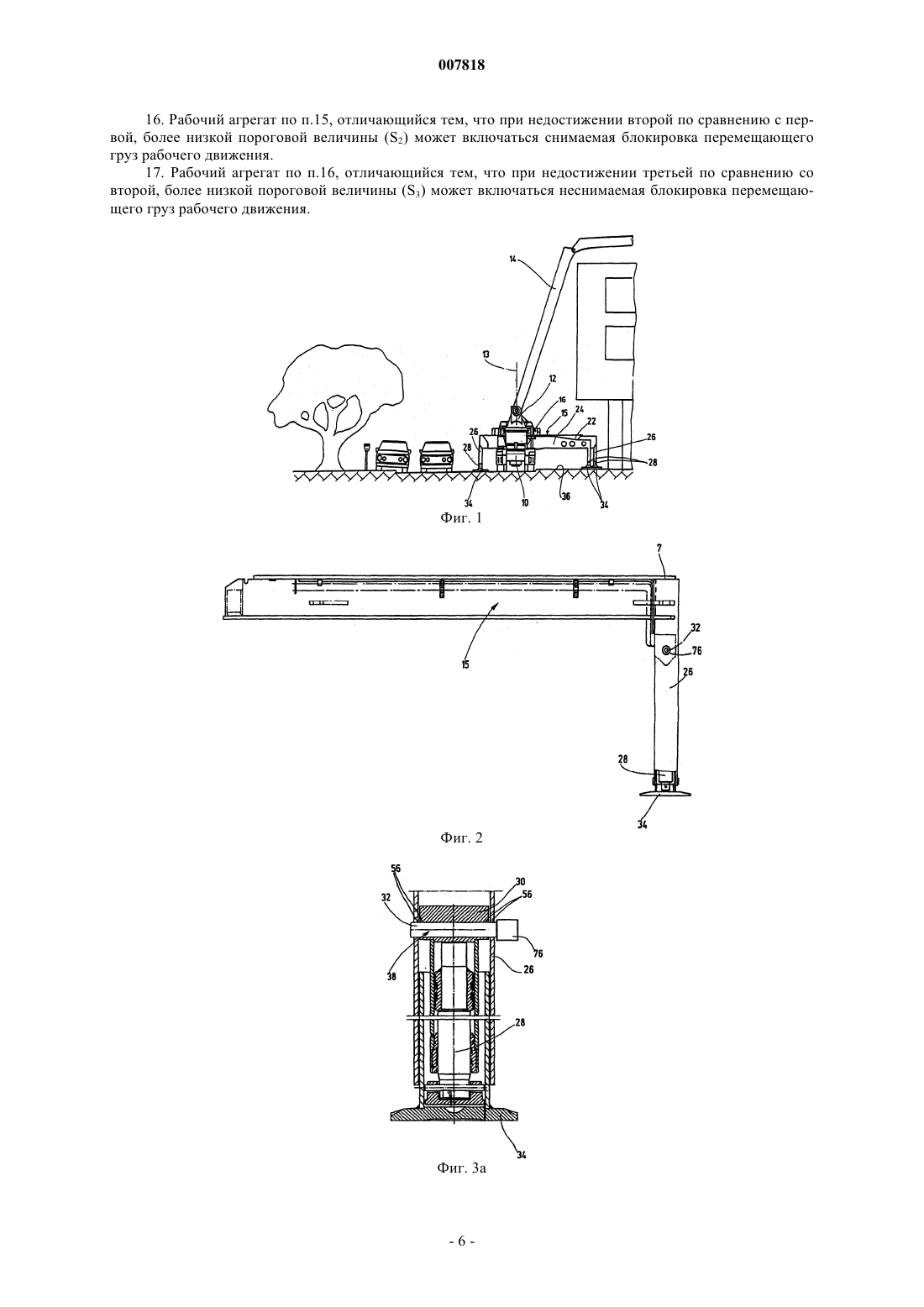
007818 Изобретение касается мобильного рабочего агрегата, в частности, автобетононасоса, с шасси, с двумя передними и двумя задними опорными консолями, выдвижными из транспортного положения по меньшей мере в одно опорное положение и выполненными с возможностью опирания соответствующей телескопической опорной ногой на грунт, и с соответствующим измерительным элементом для определения опорного усилия в опорных ногах. Мобильные рабочие агрегаты этого вида снабжены выдвижными опорными консолями, которые должны улучшать устойчивость рабочего агрегата на месте использования. При этом опорные консоли, с одной стороны, имеют задачу выключать подвеску транспортного средства и разгружать колеса. С другой стороны, опорные консоли должны уменьшать опасность опрокидывания, которая возникает, если на рабочей стреле возникают высокие опрокидывающие моменты. Опорные ноги опорных консолей образуют углы четырехугольника, боковые линии которого описывают площадь, в пределах которой должен находиться общий центр тяжести рабочего агрегата, чтобы обеспечивать устойчивость. Так как выступающая рабочая стрела является поворотной, то общий центр тяжести при повороте описывает полный круг, который должен находиться в рабочем диапазоне рабочей стрелы в пределах площади четырехугольника. Так как место на строительных площадках ограничено, то часто отказываются от полного опирания. Вследствие этого область поворота рабочей стрелы ограничивается. Чтобы гарантировать предохранение от опрокидывания, уже предлагалось устройство контроля(журнал "Beton" 6/96, стр. 362, 364). Там контролируют давление, имеющееся в четырех гидравлически приводимых телескопических опорных ногах. Если давление в двух цилиндрах опорных ног падает, то движения мачты и бетононасос выключаются. Эту технику можно использовать даже в том случае, если машина полностью не опирается из-за нехватки места. Испытания показали, что измерения давления в телескопических цилиндрах опорных ног не являются достаточными для надежного контроля опорных ног. Это имеет значение прежде всего тогда, когда один из телескопических цилиндров достиг ограничителя. Также с помощью этой системы контроля нельзя регистрировать динамические эффекты опирания. Чтобы избегать этих недостатков, уже предлагалось (DE-A 10110176), чтобы в опорной части каждой опорной ноги была расположена пара датчиков усилия. Для этого требуется специально для этого сконструированная опорная пята, которая является дорогостоящей по своей конструкции. Далее, каждый датчик усилия расположен там в электрической измерительной цепи для передачи зависимого от опорной нагрузки измерительного сигнала, причем устройство контроля включает в себя блок обработки результатов, на который в заданных циклах измерения могут подаваться полученные с опорной пяты измеренные значения нагрузки на опору для их сравнения с по меньшей мере одной предварительно заданной пороговой величиной, определяющей устойчивость. Блок обработки результатов включает в себя программное обеспечение для определения второго более низкого, отнесенного к опорной пяте измеренного значения нагрузки на опору для каждого цикла измерения для его сравнения с пороговой величиной, определяющей устойчивость. При этом в качестве недостатка рассматривается то, что пороговая величина это зависимая от конструкции, перегруженная размерами величина, и что для определения существенных для устойчивости значений нагрузки требуется высокая точность измерения даже при низких нагрузках. Исходя из этого, в основе изобретения лежит задача разработки мобильного рабочего агрегата с опорными консолями, у которого простыми средствами и с достаточной точностью возможно измерение нагрузки на опору в опорных ногах, чтобы обеспечить надежный контроль устойчивости. Для решения этой задачи предлагаются указанные в пп.1 и 17 формулы изобретения комбинации признаков. Предпочтительные варианты осуществления и развития изобретения следуют из зависимых пунктов формулы изобретения. Соответствующее изобретению решение исходит из знания того, что при опорных консолях, у которых телескопические опорные ноги шарнирно присоединены стационарным относительно консоли телескопическим звеном посредством поворотного болта к коробу опорной ноги, причем поворотный болт может быть выполнен в виде измерительного элемента для определения нагрузки на опору. Предпочтительное выполнение изобретения предусматривает, чтобы было предусмотрено устройство для определения возникающего в процессе опирания упругого изгиба поворотного болта, как меры, отнесенной к опорной ноге нагрузки на опору. В этом случае поворотный болт несет на себе по меньшей мере один тензорезистор для определения изгиба болта. Предпочтительный вариант исполнения изобретения предусматривает, чтобы поворотный болт имел по меньшей мере один проходящий параллельно оси продольный паз для прием, по меньшей мере одного тензорезистора. Предпочтительным образом, поворотный болт имеет два противолежащих друг другу относительно плоскости изгиба, открытых на противоположных сторонах продольных паза для приема, соответственно, двух тензорезисторов, причем присоединения тензорезисторов связаны друг с другом в измерительной схеме, преимущественно, выполненной в качестве мостовой схемы. Далее, поворотный болт целесообразным образом содержит открытое с одной стороны центральное отверстие, а также проходящее от по меньшей мере одного продольного паза к центральному отверстию поперечное отверстие для принятия измерительного кабеля. Согласно другому варианту осуществления изобретения предусмотрено устройство для определе-1 007818 ния возникающего в процессе опирания в области опорных участков поворотного болта упругой деформации сдвига, как меры, отнесенной к опорной ноге нагрузки на опору. В этом случае поворотный болт несет на себе по меньшей мере один тензорезистор для определения деформации сдвига в области его опорных участков. Предпочтительным образом, поворотный болт для этой цели имеет в области опорных участков по меньшей мере одно проходящее в направлении опирания поперек оси болта сквозное отверстие, в котором расположена связанная за одно целое с материалом болта мембрана для приема по меньшей мере одного тензорезистора. Предпочтительно, поворотный болт на обоих опорных участках имеет по одному сквозному отверстию с мембраной, причем мембрана расположена в плоскости сдвига между внутренней и внешней опорой опорной ноги. Внешняя опора образует поддерживающее средство для болта в коробе опорной ноги, в то время как внутренняя опора поддерживает стационарную телескопическую часть. На обращенных друг от друга поверхностях широких граней мембраны целесообразно расположен соответственно один проходящий параллельно поверхности сдвига тензорезистор, причем тензорезисторы связаны друг с другом в измерительной схеме, преимущественно, выполненной как мостовая схема. В обоих вариантах осуществления измерительная схема присоединяется со стороны выхода через усилитель сигналов к компьютеризированному блоку обработки результатов. Предпочтительное или альтернативное выполнение изобретения предусматривает, чтобы блок обработки результатов имел программное обеспечение для определения коэффициента устойчивости из отношения общей суммы измеренных значений нагрузок на опору всех опорных ног к частичной сумме измеренных значений нагрузок на опору обеих в данный момент наиболее нагруженных опорных ног, а также аварийную программу для аварийного срабатывания при недостижении заданной пороговой величины для коэффициента устойчивости. Соответствующая изобретению система позволяет контроль в режиме реального времени нагрузки на опору в области отдельных опорных ног в узкой тактовой сетке,так что динамические эффекты и эффекты инерции также могут приобщаться в эксплуатационном режиме рабочего агрегата для контроля технического состояния. Чтобы предотвращать опрокидывание рабочего агрегата в режиме эксплуатации, предусмотрено несколько ступенчатых, обеспечивающие аварийное срабатывание пороговых величин для контроля устойчивости. При недостижении первой пороговой величины оператор предупреждается акустическим и/или оптическим сигналом. При недостижении второй, по сравнению с первой, более низкой пороговой величины, может включаться снимаемая блокировка переносящего груз рабочего движения. Наконец,неснимаемая блокировка переносящего груз рабочего движения будет включена при недостижении третьей, по сравнению со второй, более низкой пороговой величины. В дальнейшем изобретение разъясняется подробнее посредством схематично представленного на чертежах примера осуществления. На чертежах показано: фиг. 1 - вид установленного на краю проезжей части дороги автобетононасоса с узко опираемыми со стороны улицы опорными консолями; фиг. 2 - вид сбоку опорной консоли; фиг. 3 а и b - опорная нога с выполненным в виде измерительного элемента поворотным болтом, во вдвинутом и выдвинутом состоянии; фиг. 4 а и b - вид сверху и вид в разрезе поворотного болта, в качестве работающей на изгиб балки; фиг. 5 а и b - вид сверху и вид в разрезе второго варианта поворотного болта, в качестве работающей на изгиб балки; фиг. 6 а и b - продольное сечение и поперечное сечение поворотного болта, в качестве работающего на сдвиг болта; фиг. 7 - система для управления в схематическом представлении, соответственно, для четырех тензорезисторов в мостовой схеме с компьютеризированным блоком обработки результатов. Представленный на фиг. 1 передвижной бетононасос состоит, по существу, из многоосного шасси 10, расположенной вблизи передней оси мачтовой опоры 12 с возможностью поворота вокруг стационарной относительно шасси вертикальной оси 13 и выполненной в виде бетонораздаточной мачты рабочей стрелы 14, и опорной конструкции 15, которая имеет переднюю и заднюю опорную консоль 22, 24. Опорные консоли 22, 24 имеют направленный вниз короб 26 опорной ноги, в котором своим стационарным относительно консоли телескопическим звеном 30 закреплена соответствующая телескопическая опорная нога 28. Опорные ноги 28 выполнены с возможностью опирания на грунт 36 посредством опорной плиты 34. Передние и задние опорные консоли 22, 24 могут выдвигаться гидравлическими средствами из близкого к шасси транспортного положения в опорное положение. В показанном на фиг. 1 примере была выбрана узкая опора со стороны улицы. Узкая опора, с помощью которой можно решить проблемы площади на строительных площадках, вынужденно приводит к ограничению в угле поворота раздаточной мачты 14. Четыре стоящих на грунте опорные ноги 28 замыкают четырехугольник, стороны которого образуют, соответственно, грань опрокидывания. Для обеспечения устойчивости при перемещении раздаточной мачты 14 общий центр тяжести системы не может смещаться наружу за стороны четырехугольника. Изо-2 007818 бретение использует знание того, что положение общего центра тяжести в пределах четырехугольника опрокидывания может контролироваться посредством измерительных элементов 38 внутри опорных ног 28. В соответствии с этим в каждой опорной ноге 28 расположен один измерительный элемент 38, который в показанных примерах осуществления содержит, соответственно, четыре тензорезистора DMS1 DMS4 с соответствующей электрической измерительной цепью 44 и операционные усилители 46. Каждая измерительная цепь 44 выдает через свой усилитель 46 считываемый в заданных временных циклах,зависимый от нагрузки на опоре измерительный сигнал, который обрабатывается в блоке 48 обработки результатов с помощью подключенной бортовой ЭВМ 50. Особенность изобретения состоит в том, что измерительные элементы для определения отнесенных к опорным ногам опорных нагрузок образованы посредством поворотных болтов 32. В случае показанных на фиг. 4 и 5 примеров осуществления измерительный элемент 38 содержит устройство для определения появляющегося в процессе опирания упругого изгиба поворотного болта как меры, отнесенной к опорной ноге опорной нагрузки. С этой целью поворотный болт 32 имеет два противолежащих друг другу относительно плоскости 52 изгиба, открытых на противоположных сторонах продольного паза 54 для приема, соответственно, двух тензорезисторов DMS1, DMS3 или, соответственно, DMS2, DMS4, причем в примере осуществления, согласно фиг. 4, тензорезисторы расположены в продольных пазах 54 параллельно рядом друг с другом в продольном направлении поворотного болта 32, в то время как в примере осуществления, согласно фиг. 5, в продольных пазах расположены, соответственно, один параллельно и один поперек продольного направления поворотного болта 32 ориентированный тензорезистор. В показанном на фиг. 6 примере осуществления измерительные элементы 38 содержат устройство для определения упругих деформаций сдвига, появляющихся в процессе опирания в области опорных участков 56 поворотного болта 32, как меры, отнесенной к опорной ноге опорной нагрузки. С этой целью поворотный болт 38 имеет в области опорных участков 56, соответственно, отверстие 58, в котором расположена соединенная за одно целое с материалом болта мембрана 60. При этом мембрана расположена в направлении действия опорной нагрузки в плоскости 62 сдвига между внутренней и внешней опорой опорной ноги 28. На обеих обращенных друг от друга поверхностях широких сторон мембраны расположено, соответственно, по одному проходящему параллельно плоскости 62 сдвига и наклонно к направлению опирания тензорезистору DMS1, DMS2 или соответственно DMS3, DMS4, которые попарно пересекаются под углом 90. Тензорезисторы DMS1-DMS4 в вариантах осуществления связаны друг с другом в измерительной схеме 44, выполненной как мостовая схема, диагональные присоединения 64 которой присоединяются ко входам операционного усилителя 46. Питание измерительной схемы 44 осуществляется от вспомогательного источника 66 тока. Выходные сигналы измерительной схемы 44 подводятся через схему 68 обработки сигнала на цифровой или аналоговый индикатор 70, 72. Кроме того, выходные сигналы подводятся к бортовому компьютеру 74 для последующего анализа, в частности, для контроля устойчивости. Измерительная электроника 44 со схемой 68 обработки сигнала находится, соответственно, в корпусе 76,который выступает на одном конце соответствующего поворотного болта 32 наружу из короба 26 опорной ноги. Поворотный болт 32 содержит с этой целью открытое с одной стороны центральное отверстие 55', а также проходящее от по меньшей мере одного продольного паза 54 к центральному отверстию поперечное отверстие 55 для приема направленного в корпус 76 измерительного кабеля. При контроле устойчивости важную роль играют следующие соображения: устойчивость автобетононасоса получается из условий равновесия пространственной системы сил. При этом силы разного направления действия являются, например, переменными по времени и месту собственным весом и рабочими нагрузками, силами инерции, возникающими в процессе ускорения или торможения, или воздействующими случайно по силе и величине ветреными нагрузками. Воздействие этих факторов стоит в равновесии с мгновенной величиной усилий на опорных ногах. Как представлено выше, усилие на опорной ноге может определяться по измерительному принципу изогнутой балки или посредством измерения сдвиговых усилий. Информация о мгновенной величине всех четырех усилий на опорных ногах передается с равномерной частотой дискретизации на бортовой компьютер 74, например, по кабелю или телеметрически. В бортовом компьютере 74 поступающие значения усилий рассчитываются параллельно. Для этого сначала определяется сумма всех усилий на опорных ногах Fi (i=от 1 до 4). Для определения коэффициента S устойчивости эта суммарная величина делится на сумму обоих мгновенных наибольших усилий на опорных ногах Fa и Fb:S=(F1+F2+F3+F4)/(Fa+Fb) Если сумма обоих наивысших усилий на опорных ногах достигает суммы всех усилий на опорных ногах, то машина переходит из стабильного равновесия, например, трехточечного опирания, в нестабильное равновесие и больше не является устойчивой. Равновесие сил соответствует равенству моментов относительной одной из описанных выше граней опрокидывания. Установлением одного, независимого от машины коэффициента устойчивости, напримерS1,1 можно независимо от типа машины, положения опорных ног, ветровых нагрузок и других переменных параметров достигать неизменной предельной устойчивости.-3 007818 Важное краевое условие для надежного опирания представляет собой установку рабочего агрегата с приподнятыми от грунта 36 колесами 10 шасси. Для каждого рабочего агрегата после взвешивания известен минимальный вес для достаточной устойчивости. Это значение может храниться в бортовом компьютере 74. После выдвижения опорных ног 28 перед подъемом рабочей стрелы 14 действительный вес машин может определяться измерением усилий на опорных ногах и сравниваться с записанным номинальным значением. При недостижении номинального значения колеса шасси 10 еще стоят на грунте,так что устойчивость недостаточно гарантирована. Активирование рабочей стрелы 14 возможно за счет устройства управления машины только тогда, когда измеренный вес машины достигает или превышает записанное номинальное значение. Чтобы предотвратить опрокидывание машины в рабочем режиме, различаются три пороговые величины S1, S2, S3. При достижении первой пороговой величины S1 (например, S1=1,25) оператор информируется оптическим или акустическим сигналом о том, что рабочая стрела 14 при дальнейшем перемещении приближается к границе устойчивости. Если оператор продолжает движение дальше в угрожающем устойчивости диапазоне, то приводы рабочей стрелы 14 выключаются при достижении второй пороговой величины S2 (например, S2=1,1). Рабочая стрела 14 может снова приводиться вследствие уменьшения функции запрета, например, посредством дистанционного управления. Так как должно оставаться возможным дальнейшее движение рабочей стрелы 14 из критического положения посредством приведения в действие различных приводов рабочей стрелы 14, требуется связь контроля устойчивости с акустическими/оптическими сигналами. Возможной является при этом также настройка управляющей функции, при которой определенные приводы рабочей стрелы 14 либо остаются блокированными, либо освобождаются только в одном направлении. Для этого требуются различные алгоритмы, в зависимости от вида привода рабочей стрелы 14, к примеру, от вида складывания бетонораздаточной мачты. В наиболее неблагоприятном случае оператор, однако, продолжает движение дальше в угрожающем устойчивости диапазоне. При достижении значения соответствующей коэффициенту устойчивости пороговой величины S3 (например, S3=1,05) привод рабочей стрелы 14 должен полностью блокироваться. Разблокировка возможна только тогда, когда за счет дополнительной балластировки основания шасси,например, прикреплением навесных грузов на опорные ноги 28, заполнения отдельных, выполненных в виде резервуаров опорных ног 28, уравновешивания рабочего агрегата перекачкой содержимого резервуара от одной к другой опорной ноге 28, снова достигают состояния равновесия, соответствующего более высокой пороговой величине S2. В общем, можно констатировать следующее: изобретение относится к мобильному рабочему агрегату 28, в частности, автобетононасосу, с шасси 10, с двумя передними и двумя задними - выдвижными из транспортного положения по меньшей мере в одно опорное положение - опорными консолями 22, 24,которые соответственно опираются телескопической опорной ногой 28 на грунт 36, и с соответствующим измерительным элементом 38 для определения возникающей в соответствующей опорной ноге 28 нагрузки на опору. Если телескопические опорные ноги 28 своим стационарным относительно консоли телескопическим элементом посредством поворотного болта 32 шарнирно соединены с коробом 26 опорной ноги, то с помощью особенно простых средств возможно выполнить поворотный болт в виде измерительного элемента 38 для определения нагрузки на опору. Измерительные элементы могут быть включены в устройство для контроля устойчивости, которое включает в себя компьютеризированный блок 68, 74 обработки результатов. Для постоянного контроля устойчивости предусмотрено программное обеспечение для определения коэффициента S устойчивости, который определяется из отношения общей суммы измеренных величин нагрузок на опору всех опорных ног 28 к частичной сумме измеренных величин нагрузок на опору обеих в данный момент наиболее нагруженных опорных ног 28. Далее,предусмотрена аварийная программа для аварийного срабатывания при недостижении предварительно заданной пороговой величины S1, S2, S3 для коэффициента S устойчивости. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Мобильный рабочий агрегат, в частности автобетононасос, с шасси (10), с двумя передними и двумя задними, выполненными с возможностью выдвигания из транспортного положения по меньшей мере в одно опорное положение опорными консолями (22, 24), выполненными с возможностью опирания посредством соответствующей телескопической опорной ноги (28) на грунт (36), и с соответствующим измерительным элементом (38) для определения опорного усилия в каждой опорной ноге (28), причем телескопические опорные ноги (28) своим стационарным относительно консоли телескопическим звеном(30) посредством поворотного болта (32) шарнирно соединены с коробом (26) опорной ноги, и поворотный болт (32) выполнен в виде измерительного элемента (38) для определения нагрузки на опору, отличающийся устройством для определения возникающего в процессе опирания упругого изгиба поворотного болта (32) как меры, отнесенной к опорной ноге нагрузки на опору, причем поворотный болт (32) содержит два противолежащих друг другу относительно плоскости (52) изгиба, открытых на противоположных сторонах продольных паза (54) для приема, соответственно, двух тензорезисторов (DMS1, DMS3 или, соответственно, DMS2, DMS4), а присоединения тензорезисторов связаны друг с другом в измери-4 007818 тельной схеме (44), выполненной в виде мостовой схемы. 2. Рабочий агрегат по п.1, отличающийся тем, что поворотный болт (32) содержит открытое с одной стороны центральное отверстие (55'), а также проходящее по меньшей мере от одного продольного паза(54) к центральному отверстию поперечное отверстие (55) для приема измерительного кабеля. 3. Мобильный рабочий агрегат, в частности автобетононасос, с шасси (10), с двумя передними и двумя задними, выполненными с возможностью выдвигания из транспортного положения по меньшей мере в одно опорное положение опорными консолями (22, 24), выполненными с возможностью опирания посредством соответствующей телескопической опорной ноги (28) на грунт (36), и с соответствующим измерительным элементом (38) для определения опорного усилия в каждой опорной ноге (28), причем телескопические опорные ноги (28) своим стационарным относительно консоли телескопическим звеном(30) посредством поворотного болта (32) шарнирно соединены с коробом (26) опорной ноги, и поворотный болт (32) выполнен в виде измерительного элемента (38) для определения нагрузки на опору, отличающийся устройством для определения возникающей в процессе опирания в области опорных участков(56) поворотного болта (32) упругой деформации сдвига как меры, отнесенной к опорной ноге нагрузки на опору, причем поворотный болт (32) содержит в области опорных участков (56) по меньшей мере одно ориентированное в направлении опирания сквозное отверстие (58), в котором расположена связанная с материалом болта мембрана (60), которая несет по меньшей мере один тензорезистор (DMS1-DMS4). 4. Рабочий агрегат по п.3, отличающийся тем, что мембрана связана за одно целое с материалом болта. 5. Рабочий агрегат по п.3 или 4, отличающийся тем, что поворотный болт (32) в обоих опорных участках (56) содержит по одному сквозному отверстию (58) с мембраной (60), причем мембрана расположена в плоскости (62) сдвига между внутренней и внешней опорой опорной ноги (28). 6. Рабочий агрегат по п.5, отличающийся тем, что на обеих противоположных друг другу поверхностях широких граней мембраны (60) расположены, соответственно, проходящие параллельно плоскости(62) сдвига тензорезисторы (DMS1-DMS4), и что тензорезисторы связаны друг с другом в измерительной схеме (44), преимущественно выполненной в виде мостовой схемы. 7. Рабочий агрегат по любому из пп.3-6, отличающийся тем, что расположенные на обеих поверхностях широких граней мембраны (60) тензорезисторы ориентированы наклонно к направлению опирания. 8. Рабочий агрегат по п.7, отличающийся тем, что расположенные на обеих поверхностях широких граней мембраны тензорезисторы (DMS1-DMS4) попарно пересекаются друг с другом под углом от 45 до 90. 9. Рабочий агрегат по любому из пп.1, 2 или 6-8, отличающийся тем, что измерительная схема (44) присоединяется через усилитель сигналов (46), выполненный в виде операционного усилителя, к компьютеризированному блоку (48, 50) обработки результатов. 10. Рабочий агрегат по любому из пп.1-9, отличающийся тем, что поворотный болт (32) на выступающей из короба опорной части ноги несет корпус (76) для приема блока (44, 68) измерения и обработки результатов. 11. Рабочий агрегат по п.9 или 10, отличающийся тем, что блок (48, 50) обработки результатов имеет программное обеспечение для определения коэффициента (S) устойчивости из отношения общей суммы измеренных значений нагрузок на опору всех опорных ног к частичной сумме измеренных значений нагрузок на опору обеих в данный момент наиболее нагруженных опорных ног, а также аварийную программу для аварийного срабатывания при недостижении предварительно заданной пороговой величины для коэффициента устойчивости. 12. Рабочий агрегат, в частности автобетононасос, с шасси (10), с двумя передними и двумя задними, выполненными с возможностью выдвигания из транспортного положения по меньшей мере в одно опорное положение опорными консолями (22, 24), выполненными с возможностью опирания посредством соответствующей телескопической опорной ноги (28) на грунт (36), и с соответствующим измерительным элементом (38) для определения опорного усилия в каждой опорной ноге (28), и с устройством для контроля устойчивости, которое включает в себя блок (68, 74) обработки результатов, на который в заданные циклы измерения могут подаваться отнесенные к опорной ноге измеренные значения нагрузок на опору, отличающийся программным обеспечением для определения коэффициента (S) устойчивости из отношения общей суммы измеренных значений нагрузок на опору всех опорных ног (28) к частичной сумме измеренных значений нагрузок на опору обеих в данный момент наиболее нагруженных опорных ног (28), а также аварийную программу для аварийного срабатывания при недостижении предварительно заданной пороговой величины для коэффициента устойчивости. 13. Рабочий агрегат по п.11 или 12, отличающийся тем, что обеспечивающая аварийное срабатывание пороговая величина лежит между 1,05 и 1,25. 14. Рабочий агрегат по любому из пп.11-13, отличающийся тем, что несколько ступенчатых пороговых величин (S1, S2, S3) для устойчивости являются обеспечивающими аварийное срабатывание. 15. Рабочий агрегат по п.14, отличающийся тем, что при недостижении первой пороговой величины(S1) может подаваться акустический и/или оптический сигнал.-5 007818 16. Рабочий агрегат по п.15, отличающийся тем, что при недостижении второй по сравнению с первой, более низкой пороговой величины (S2) может включаться снимаемая блокировка перемещающего груз рабочего движения. 17. Рабочий агрегат по п.16, отличающийся тем, что при недостижении третьей по сравнению со второй, более низкой пороговой величины (S3) может включаться неснимаемая блокировка перемещающего груз рабочего движения.
МПК / Метки
МПК: G01L 1/22, B60S 9/10, B66C 23/80
Метки: опорными, агрегат, рабочий, мобильный, консолями
Код ссылки
<a href="https://eas.patents.su/9-7818-mobilnyjj-rabochijj-agregat-s-opornymi-konsolyami.html" rel="bookmark" title="База патентов Евразийского Союза">Мобильный рабочий агрегат с опорными консолями</a>
Рабочий орган очесывающего устройства
Номер патента: 2649
Опубликовано: 29.08.2002
Авторы: Чуксин Петр Иванович, Шпаковский Николай Андреевич
МПК: A01D 41/08
Метки: устройства, орган, очесывающего, рабочий
Формула / Реферат:
1. Рабочий орган очесывающего устройства, включающий ленточный транспортер с кронштейнами, закрепленными на ленте, и установленными на кронштейнах очесывающими зубьями, отличающийся тем, что на верхней поверхности зубьев у их оснований выполнены углубления, а у их окончаний - выступы, причем касательная к любой точке обращенной к транспортеру верхней поверхности зубьев, нормальная в плане к поверхности ленты, имеет угол наклона к прямой,...
Машина для вскрытия трубопровода и рабочий орган
Номер патента: 749
Опубликовано: 28.02.2000
Авторы: Мовчан Алий А., Ибрагимов Марат Шарипович, Кумылганов Александр Семенович, Быков Александр Владимирович, Джарджиманов Александр Сергеевич, Мамонтов Юрий М., Мусийко Владимир Данилович, Черняев Валерий Давыдович, Василенко Станислав Кузьмич, Яковлев Виктор Иванович, Решетников Владимир П.
МПК: E02F 5/06
Метки: трубопровода, рабочий, орган, машина, вскрытия
Формула / Реферат:
1. Машина для вскрытия трубопровода, включающая базовое шасси (1) и рабочее оборудование (2), включающее в себя раму (3) с эвакуатором грунта (4), которая шарнирно связана с базовым шасси (1) с возможностью поворотов в горизонтальной и вертикальной плоскостях, рабочий орган (5), который выполнен в виде цепных секций (19), смонтированных на раме (3) с эвакуатором грунта (4), копирное устройство (6), выполненное в виде опоры (27) на трубопровод...
Рабочий инструмент со сменной рабочей режущей пластиной
Номер патента: 3340
Опубликовано: 24.04.2003
Автор: Шэвеланд Магне
МПК: A01B 15/06
Метки: рабочий, пластиной, режущей, рабочей, инструмент, сменной
Формула / Реферат:
1. Сменная подверженная износу деталь, монтируемая на переднем краю рабочего инструмента, причем указанный передний край и указанная подверженная износу деталь имеют взаимодействующие направляющие образования, проходящие, в общем, перпендикулярно переднему краю и образующие гнездо и выступ, поддающийся скольжению при плотном прилегании для приведения подверженной износу детали в движение посредством силы, в общем, перпендикулярной переднему...
Способ изготовления рабочего элемента для нагревателей и рабочий элемент, получаемый этим способом
Номер патента: 5062
Опубликовано: 28.10.2004
Автор: Лолли Вальтер
МПК: F28F 21/08, F28D 1/053
Метки: этим, рабочего, нагревателей, получаемый, способ, изготовления, способом, элемент, рабочий, элемента
Формула / Реферат:
1. Способ изготовления рабочего элемента для нагревателя, отличающийся тем, что включает следующие этапы: обеспечивают заготовку (1) из листового металла; указанную заготовку (1) листового металла подвергают глубокой вытяжке с получением полой формованной заготовки (2), определяемой основной стенкой (3), сторонами (4, 5, 14, 15), соединенными с основной стенкой и окружающими ее и образующими открытую сторону (6); разрезают стороны (4, 5, 14, 15)...
Уборочный агрегат
Номер патента: 3041
Опубликовано: 26.12.2002
Авторы: Келлер Альфонс, Алер Вильхельм, Кроне Бернард
МПК: A01D 45/02
Формула / Реферат:
1. Уборочный агрегат (1) для уборки кукурузы или подобных стебельчатых культур, причем уборочный агрегат (1) содержит, по меньшей мере, одну снабженную удерживающими органами (17; 18) для скошенных растений (3) звенную цепь (4; 5) со стороной (4а; 5а) рабочей ветви, при работе перемещающейся поперек направления (F) движения уборочного агрегата (1), отличающийся тем, что измеренная в направлении (U1; U2) вращения протяженность (Т) одного звена...
Предыдущий патент: Жатка прицепная
Следующий патент: Машина для подборки и прессования растениеводческой продукции
Случайный патент: Способ и устройство для выполнения боковых ответвлений, отходящих от буровой скважины