Способ слежения для радиолокационной системы
Номер патента: 517
Опубликовано: 28.10.1999
Авторы: Эванс Робин Джон, Палфорд Грэхэм Уильям, Джерротт Роберт Кейт
Формула / Реферат
1. Способ слежения для системы эхо-сигналов, заключающийся в том, что формируют множество строб-импульсов для соответствующих мод распространения на основе предсказания состояния цели в течение времени облучения цели и формируют оценки состояния цели в течение указанного времени облучения цели на основе точек измерения цели, попадающих в указанные строб-импульсы.
2. Способ слежения по п.1, отличающийся тем, что получают исходные точки измерения цели в течение исходного времени облучения цели, инициируют слежение с помощью получения исходной оценки состояния цели, по меньшей мере, от одной точки из числа указанных исходных точек и определяют указанное предсказание состояния цели в течение времени облучения цели, следующим за указанным исходным временем, на основе указанной оценки состояния цели.
3. Способ слежения по п.2, отличающийся тем, что оценку состояния цели формируют путем применения гипотез ассоциации для указанных точек измерения в указанных строб-импульсах и применения вероятностей ассоциации для указанных гипотез, при этом получают условные оценки состояния по точкам измерения для каждой гипотезы и суммируют указанные условные оценки состояния, умноженные на указанные вероятности.
4. Способ слежения по п.3, отличающийся тем, что вероятность наличия РE траектории цели получают, по меньшей мере, от одной из указанных вероятностей ассоциации, и если РE меньше заданного порогового значения, то траекторию цели, поддерживаемую с помощью указанной оценки состояния цели, исключают.
5. Способ слежения по п.4, отличающийся тем, что указанные точки измерения являются вероятными точками обнаружения в пространстве дальность-азимут-доплеровский сдвиг частоты (RAD), полученными в течение времени облучения цели.
6. Способ слежения по п.5, отличающийся тем, что указанное предсказание состояния цели получают на основании указанной оценки состояния цели с помощью линейных уравнений движения.
7. Способ слежения по п.6, отличающийся тем, что строб-импульсы являются строб-импульсами подтверждения, имеющими эллипсоидальную форму в пространстве RAD, и которые получают путем транспонирования указанного предсказания состояния цели в отношении пространства RAD для соответствующих мод распространения для получения предсказания измерения и взаимодействующих ковариаций предсказания для соответствующих мод распространения, определяющих указанные строб-импульсы подтверждения.
8. Способ слежения по п.7, отличающийся тем, что указанные гипотезы включают гипотезу несуществующей цели, при этом точки измерения в указанных строб-импульсах представляют мешающие отраженные сигналы и точка измерения, по меньшей мере, в одном из указанных строб-импульсов представляет обнаружение цели.
9. Способ слежения по любому из пп. с 2 по 8, отличающийся тем, что инициирование слежения выполняют для множества мод распространения, чтобы инициировать множество следящих фильтров путем формирования множества указанных исходных оценок состояния цели.
10. Способ слежения для системы эхо-сигналов, заключающийся в том, что удлиняют вектор состояния цели для включения дополнительных параметров, связанных с множеством мод распространения, формируют множество строб-импульсов для указанных мод распространения и учитывают неопределенность измерения, связанную с характеристиками траектории распространения для указанных мод, при корректировке оценок состояния цели для времени облучения цели на основе измерений, которые попадают в строб-импульсы.
Текст
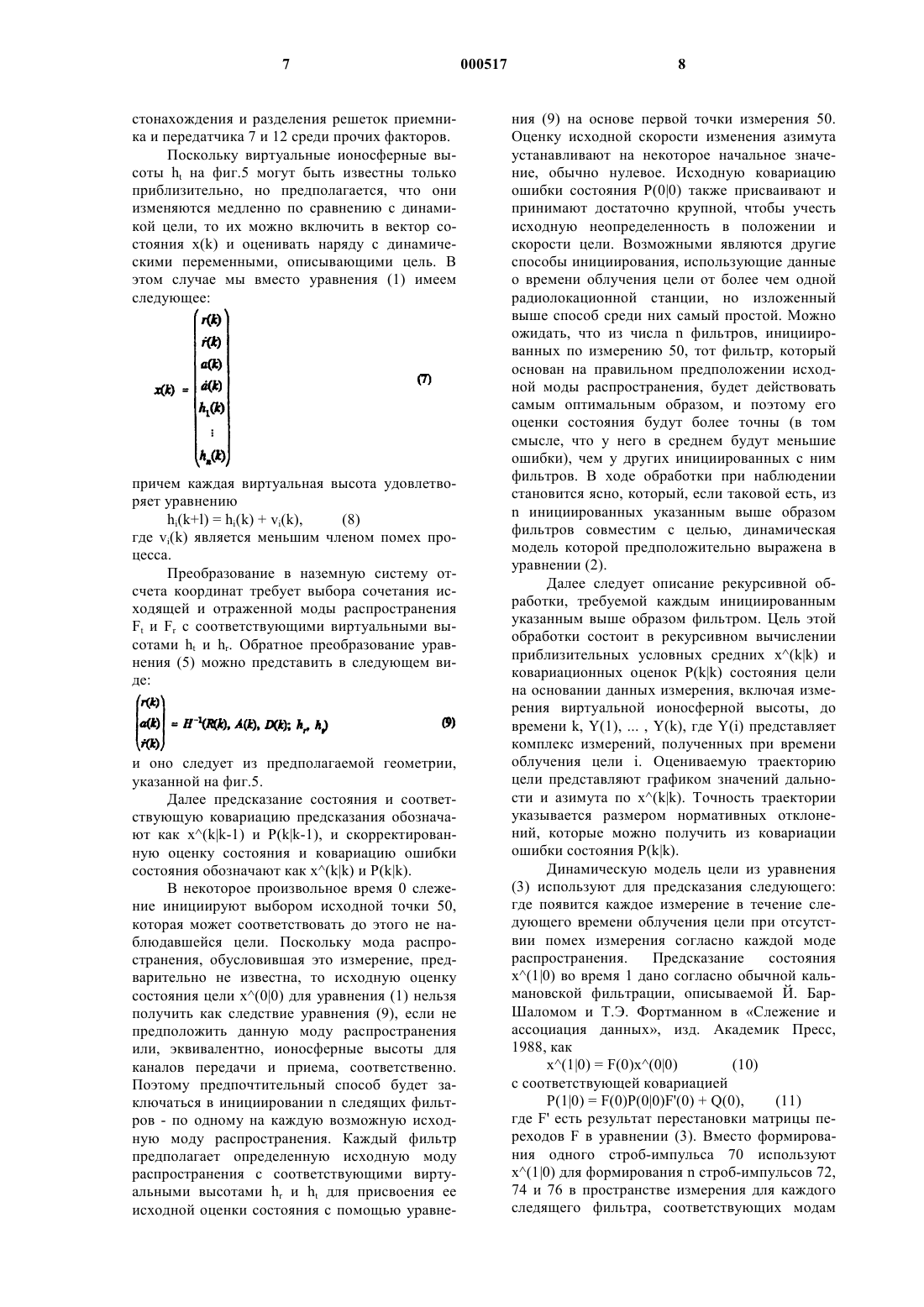
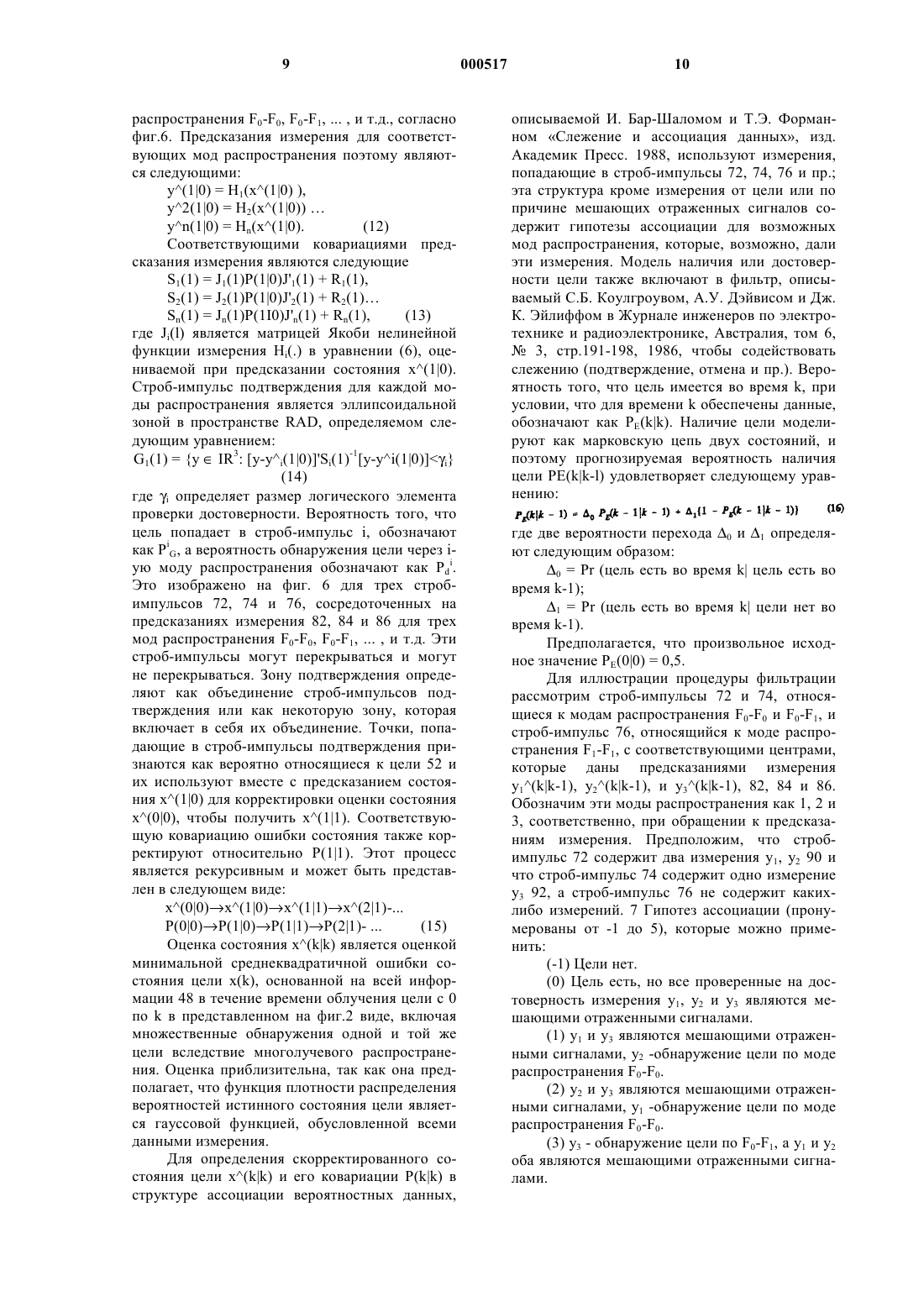
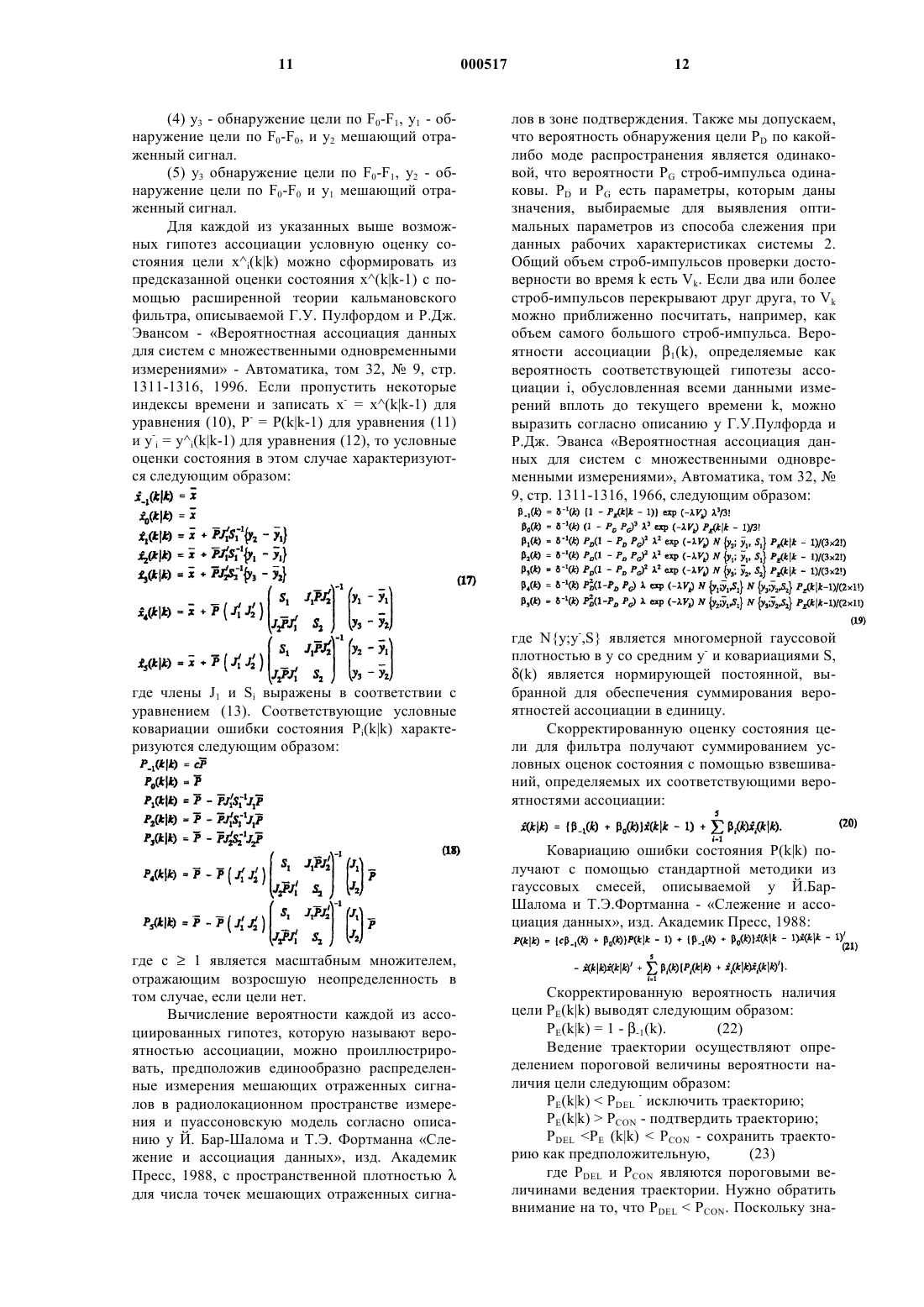
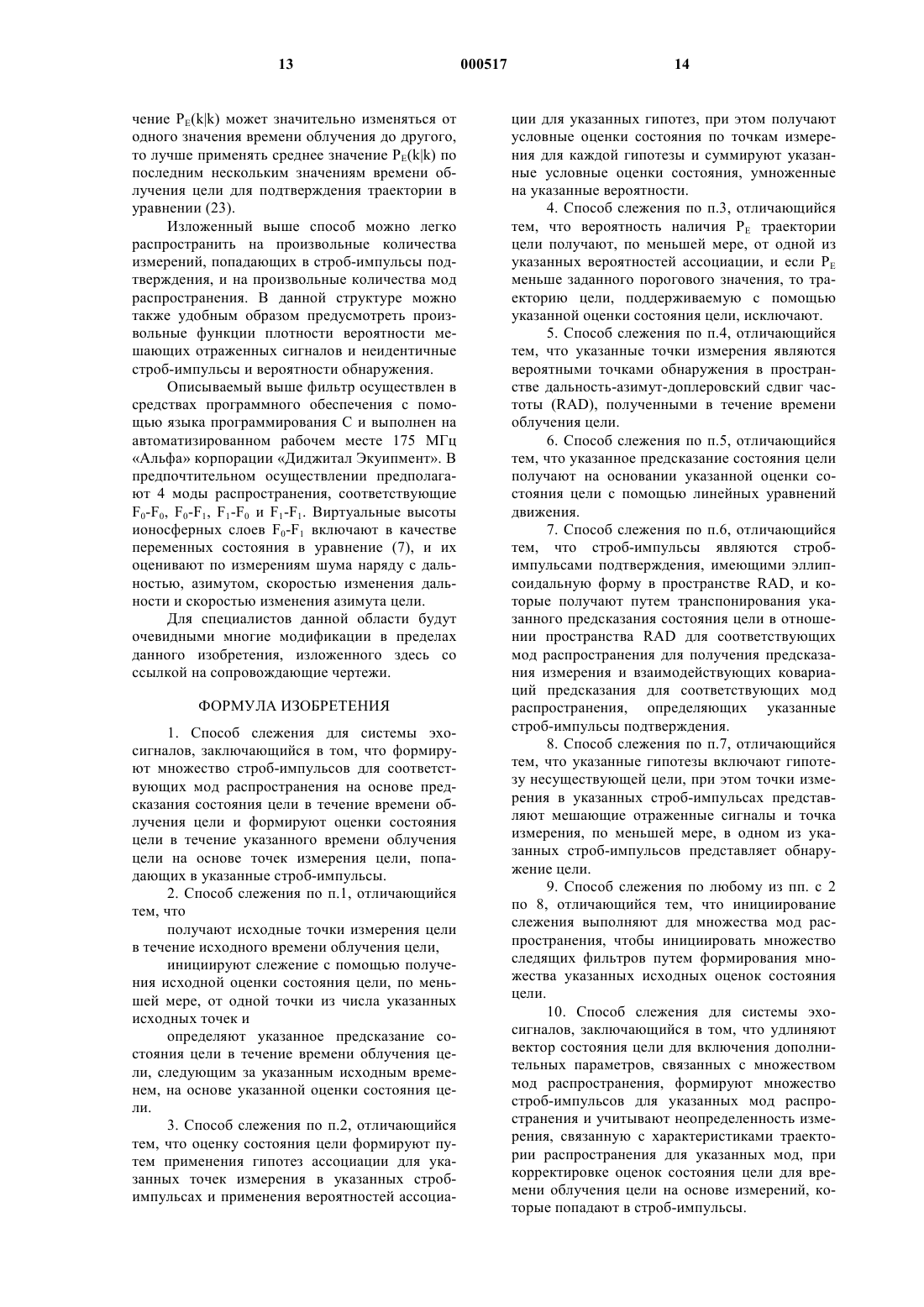
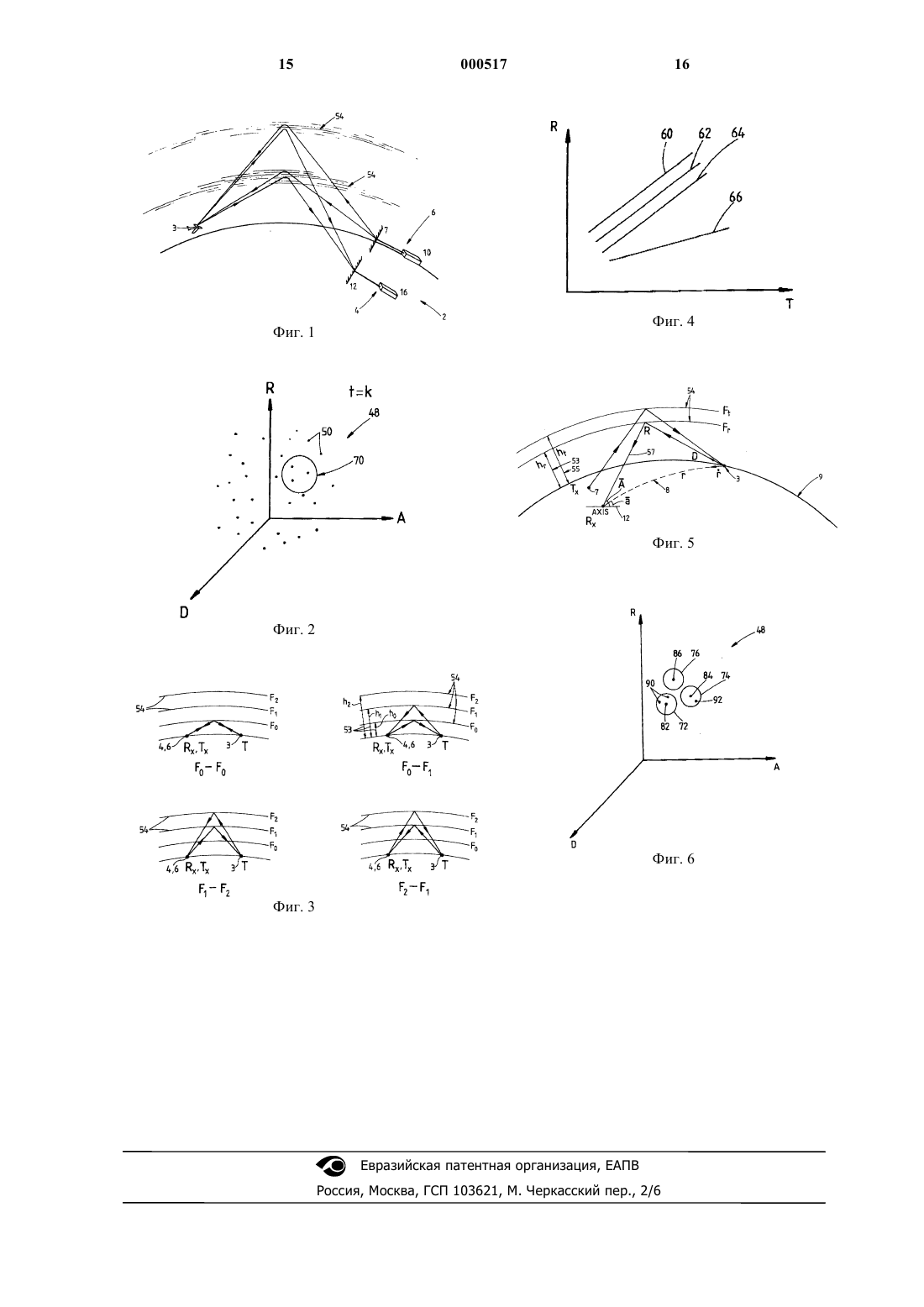
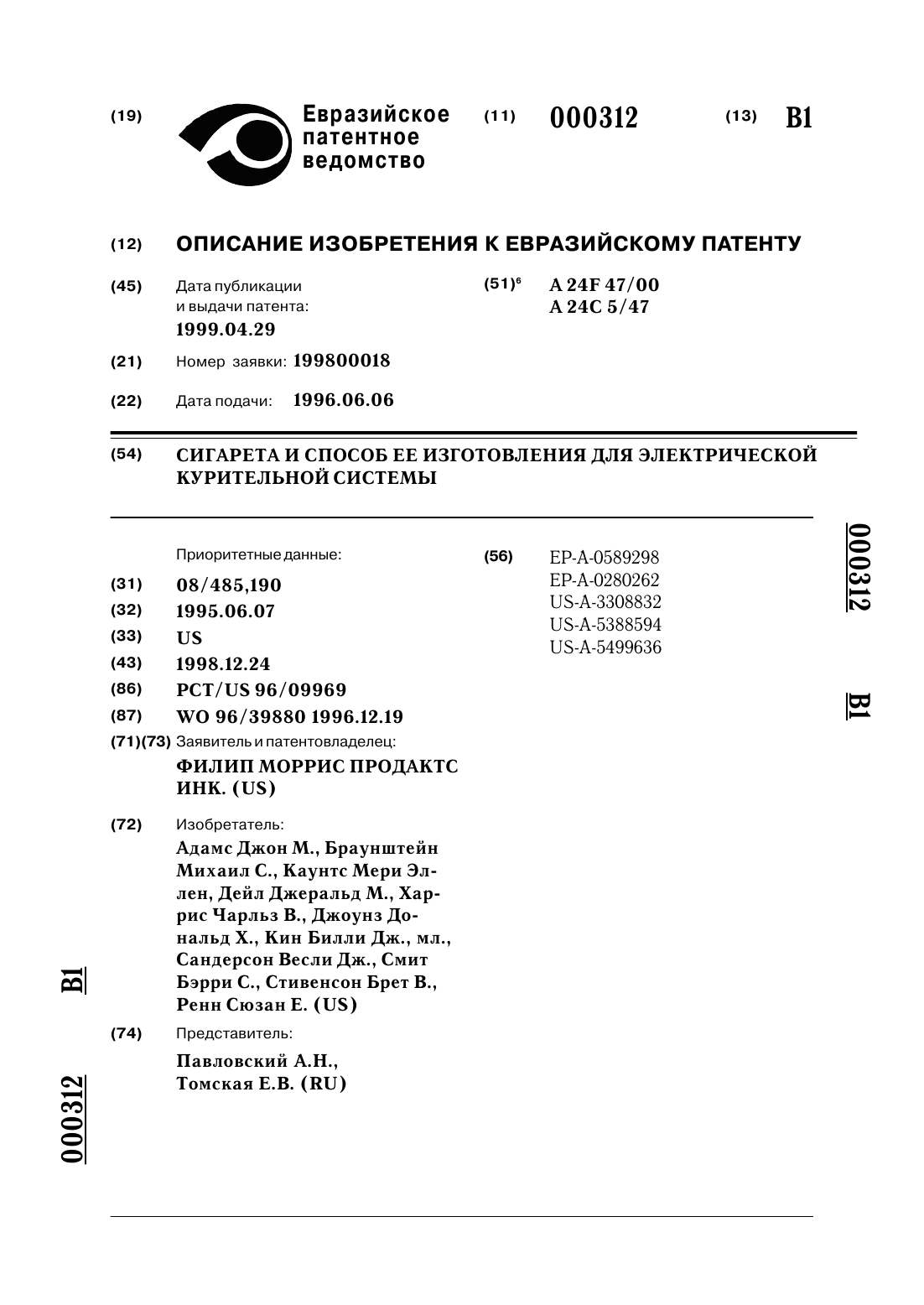
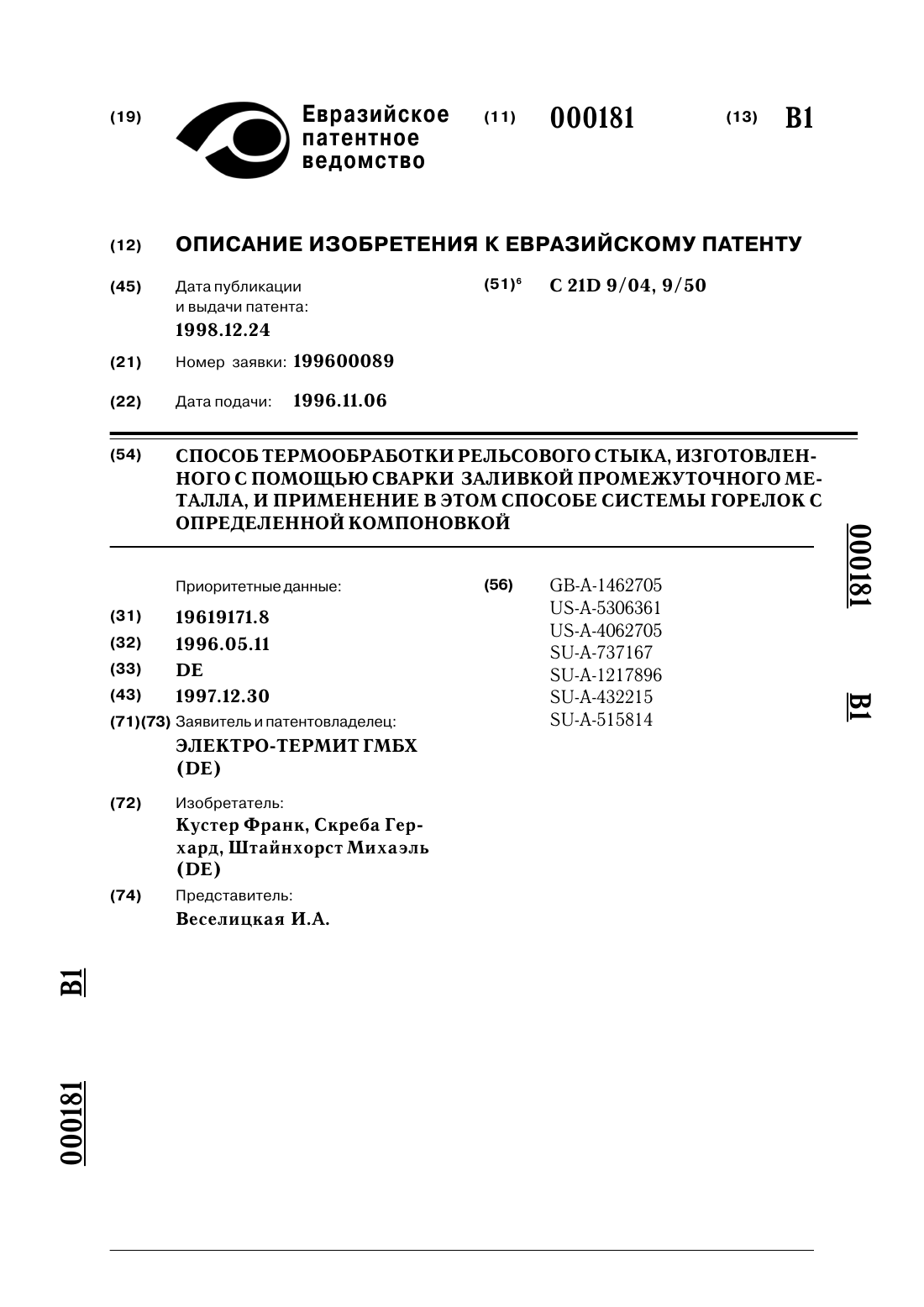
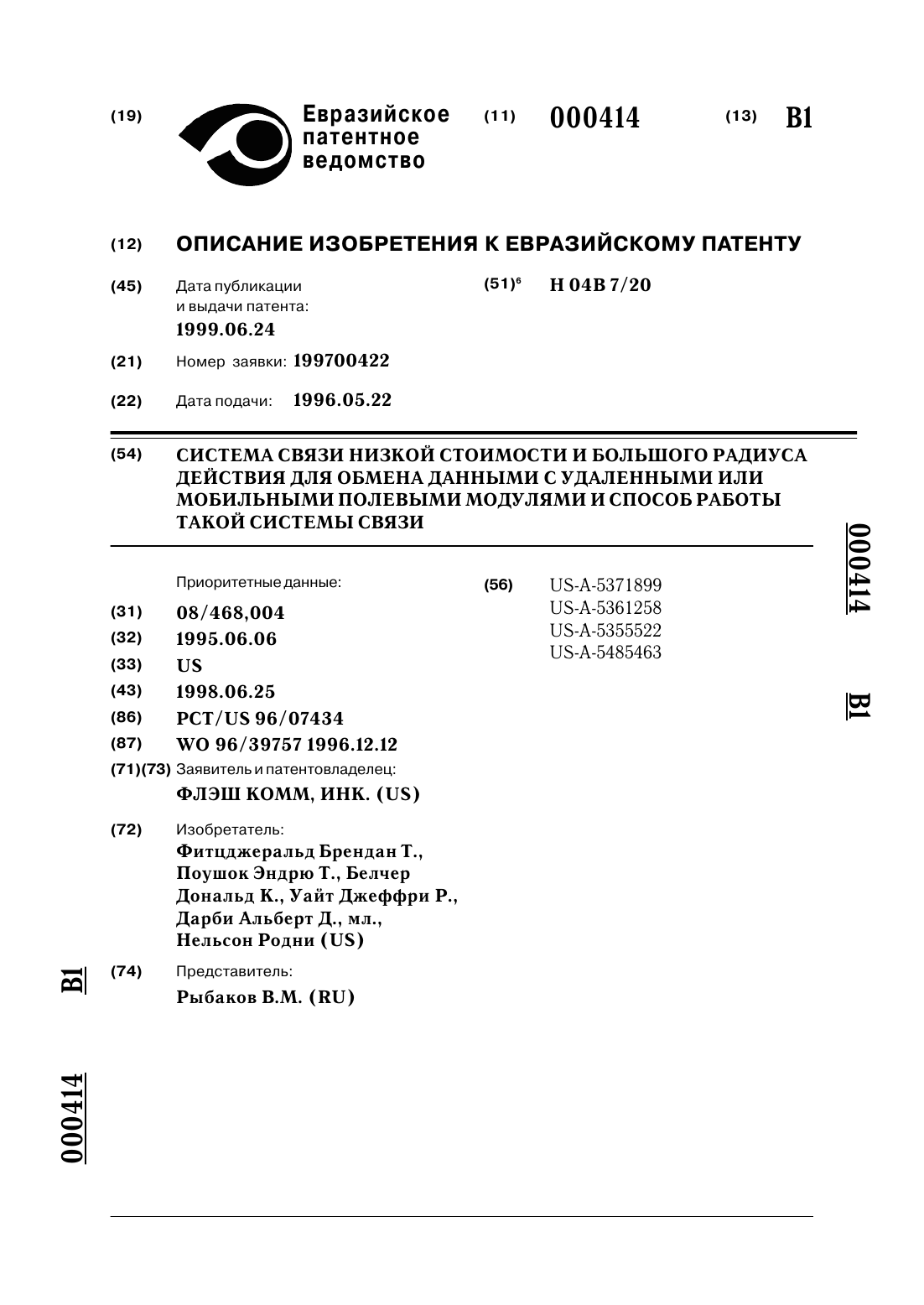
1 Данное изобретение относится к способу слежения для радиолокационной системы, такой как радиолокационная система с фазированной антенной решеткой или бистатическая радиолокационная система. Хотя в следующем ниже описании речь идет о его применении для радиолокационных систем, данное изобретение можно также использовать для систем эхосигналов, таких как гидролокационные системы. Радиолокационные сигналы, отраженные от цели, дают возможность определять данные о наклонной дальности, азимуте и скорости цели относительно приемной системы радиолокационной системы. Приемная система, тем не менее, обычно принимает некоторое число сигналов, отраженных от цели и имеющих разные траектории или моды. Помехи, принимаемые приемной системой и наводимые в ней, могут также быть ошибочно приняты за отраженный от цели сигнал и должны учитываться. Применяют способы слежения, которые отслеживают цель на основе сигналов, относящихся к одной моде распространения. Тем не менее, выбор одной моды распространения оставляет без внимания информацию о других модах, которые можно использовать для повышения точности и чувствительности способа слежения. Согласно данному изобретению обеспечивают способ слежения для системы эхо-сигнала,заключающийся в том, что формируют множество строб-импульсов для соответствующих мод распространения на основе предсказания состояния цели в течение времени облучения цели и формируют оценки состояния цели в течение указанного времени облучения цели на основе точек измерения цели, попадающих в указанные строб-импульсы. Данное изобретение обеспечивает способ слежения для системы эхо-сигнала, заключающийся в том, что получают точки измерения цели в течение времени облучения цели,инициируют слежение путем получения исходной оценки состояния цели от, по меньшей мере, одной из указанных точек,определяют предсказание состояния цели в течение следующего времени облучения цели на основе указанной оценки состояния цели,формируют множество строб-импульсов для соответствующих мод распространения на основе предсказания состояния цели и формируют оценки состояния цели в течение указанного последующего времени облучения цели на основе точек измерения цели, которые находятся в указанных строб-импульсах. Оценку состояния цели можно формировать путем применения гипотез ассоциации для указанных точек измерения в указанных стробимпульсах и путем применения вероятностей ассоциации для указанных гипотез, при этом получают условные оценки состояния по точкам измерения для каждой гипотезы и суммируют 2 указанные условные оценки состояния, умноженные на указанные вероятности. Этап инициирования слежения можно преимущественно осуществлять для множества мод распространения, чтобы инициировать множество следящих фильтров путем формирования множества указанных оценок состояния цели в течение указанного последующего времени облучения цели. Данное изобретение также обеспечивает способ слежения для системы эхо-сигнала, заключающийся в том, что удлиняют вектор состояния цели для включения дополнительных параметров, связанных с множеством мод распространения, и учитывают неопределенность измерения, связанную с характеристиками траектории распространения для указанных мод при корректировке оценок состояния цели. Предпочтительное осуществление данного изобретения далее излагается только в качестве примера со ссылкой на сопровождающие чертежи, на которых: фиг. 1 - условная схема загоризонтной радиолокационной системы (ЗРЛС); фиг. 2 - система координат измерения; фиг. 3 - диаграмма возможных мод распространения; фиг. 4 - график траекторий цели; фиг. 5 - диаграмма измерительной геометрии данной системы; и фиг. 6 - несколько строб-импульсов для оценки состояния цели. Бистатические радиолокационные системы применяют отдельные пункты местоположения передатчика и приемника и включают в себя загоризонтные радиолокационные системы(ЗРЛС), которые направляют сигналы передачи над горизонтом для отражения ионосферой и которые известны под названием ионосферных радиоволновых систем. Системы ЗРЛС также включают в себя радиолокационные станции с земной радиоволной, которые распространяют радиолокационные волны по поверхности морской воды и принцип действия которых основан на системе приема, которая обнаруживает объекты по радиолокационным сигналам, отраженным от них. Система ЗРЛС 2 согласно фиг.1 содержит приемную систему 4 и передающую систему 6. Передающая система 6 содержит решетку 7 передающих антенн, находящихся в пункте местоположения передатчика, и систему управления 10 для подачи электросигналов к антеннам. Приемная система 4 содержит решетку 12 приемных антенн и систему управления 16 для обработки сигналов, принимаемых антеннами,которые расположены в пункте местоположения приемника. Системы ЗРЛС включают в себя Станцию Джиндали в Элис Спрингз и систему РЗРЛС ВМС США. Широкий передающий луч радиолокационной станции направляют к зонам ионосферы, 3 от которой отраженные сигналы перенаправляются для контролирования цели 3. Луч по существу направляют в район или зону, в которой находится цель. В одном районе могут находиться несколько целей, и система управления приемником 16 выполнена с возможностью разделять энергию, отраженную от облученного района, на двенадцать более мелких лучей, каждый из которых затем можно подразделить на множество элементов по дальности, характеризуемых соответствующим расстоянием от приемной системы 4. Это дает возможность приемной системе 4 следить за несколькими целями,которые находятся в облучаемом районе. Принимаемые лучи можно также разделять на множество элементов по скорости, характеризуемых скоростью объекта относительно приемной системы 4. Это дает возможность отделять цели друг от друга исходя из их скорости, если их нельзя отделить друг от друга, исходя из расстояния от них до приемной системы 4. Передающий и принимающий лучи можно перемещать или развертывать синхронно по числу положений управляемого луча, при этом время,затрачиваемое на то или иное данное положение, будет называться временем облучения цели. Измерения, получаемые на основании радиолокационных сигналов или эхо-сигналов,принимаемых в течение каждого времени облучения цели, называют измерениями облучения цели. Управляющие средства программного обеспечения системы управления 16 выполнены с возможностью получения четырех параметров, относящихся к цели, от каждого времени облучения цели, а именно: длина траектории распространения или наклонная дальность (R),азимут (А) , доплеровский сдвиг частоты или радиальная скорость (D) и уровень сигнала по измерению отношения сигнал-шум. Они называются RAD или радиолокационными координатами. Набор измерений в течение данного времени облучения цели также включает в себя мешающие отраженные сигналы и сигналы обнаружения от других целей. Значения времени облучения цели можно графически представить графиком вероятных точек обнаружения на трехмерной оси согласно фиг. 2 для времени облучения цели t=k, где одна ось представляет величины R, другая - А, и третья - D. Для того или иного времени облучения цели t=k приемная система 4 может определить точки 50 из числа вероятных точек обнаружения в количестве порядка 100 или 1000 точек. Некоторые точки 50 могут соответствовать цели, а другие могут просто относиться к мешающим эхо-сигналам или к помехам самих передающей 6 или приемной 4 систем. Мешающие эхосигналы возникают от обратного рассеяния от земли или от не представляющих интерес объектов, таких как метеоры. Система ЗРЛС 2 также подвергается многолучевому распростране 000517 4 нию в том отношении, что имеется несколько траекторий для эхо-сигналов, отражающихся от цели из-за того, что есть несколько разных ионосферных слоев 54 на разных высотах 53, которые отражают эхо-сигналы вниз к приемной системе 4, - согласно фиг.3. Может быть до четырех различных отражающих слоев F0, F1, F2 иF3, в результате чего будут различные эхосигналы, отраженные от цели, соответствующие отражениям от сочетаний этих слоев. Моды распространения характеризуются слоями, от которых отражается сигнал. Например F0-F1 является модой распространения для канала передачи через слой F0 и канала приема через слой F1, где Т представляет цель 3, как показано на фиг. 3. Хотя траектория распространения для вероятной точки обнаружения 50 не известна,высоту разных слоев можно определить с помощью коммерческих ионосферных зондов, и это даст некоторые сведения о взаимосвязи между точками разных мод распространения для одной и той же цели. Знание высот и свойств каждого слоя дает указание ожидаемых измерений RAD разных мод распространения. Состояние цели при данном времени облучения цели k можно представить как где r есть дальность, а - азимут, r - скорость изменения дальности, a - скорость изменения азимута. Уравнения движения можно использовать для характеристики динамики цели: например, постоянная скорости цели при постоянных значениях времени облучения цели Т будет соответствовать следующим уравнениям:(2) Это можно охарактеризовать в известном виде состояния-пространства как где Tk есть период между временами облучения цели k и k+1. Член v(k) представляет нулевое среднее; белый Гауссов шум процесса -такой,который применяют в обычной кальмановской фильтрации. Предполагается, что ковариационная матрица Q(k) для v(k) известна. Используемый в настоящее время способ слежения, который основан на фильтре вероятностной ассоциации данных (ВАД), описываемом у Й. Бар-Шалома и Т.Э. Фортманна Слежение и ассоциация данных, изд. Академик Пресс, 1988, выполняет слежение в радиолока 5 ционных координатах R, D, А, А согласно фиг.2. Слежение инициируют выбором одного с шумами измерения 50, при этом неизвестную скорость изменения азимута А первоначально устанавливают так, чтобы она соответствовала гипотетической скорости пересечения азимута обычно нулевой. Последующий выбор измерения выполняют только теми измерениями, которые попадают в строб-импульс подтверждения 70 вокруг следующего ожидаемого положения измерения цели. Для этого способа не требуется знание отображения координат радар-земля во время слежения. Недостаток этого способа заключается в том, что он не использует информацию, поставляемую многими обнаружениями,возникающими из многолучевого распространения. Присутствие многолучевого распространения может вызвать формирование нескольких траекторий 60, 62 и 64 для одной цели согласно фиг.4, когда слежение производят в координатах радиолокации с помощью обычных фильтров, таких как BAD. Если траектории 62 и 64 близко соответствуют ожидаемым разделениям для гипотетических мод, то их можно считать относящимися к одной и той же цели 52 фиг. 5,в то время как траекторию 66, которая чрезмерно отклоняется от других, можно не принимать во внимание как соответствующую другой цели или мешающему отраженному сигналу. В такой ситуации, нередко возникающей при обычномBAD-слежении, требуется операция слияния или группирования для группирования многомодовых траекторий, вместе относящихся к одной и той же цели. Это дает возможность отождествить данную траекторию с определенной модой распространения. Тогда для отображения траекторий в наземных координатах в целях географического изображения для операторов радиолокационных станций (РЛС) требуется последующий этап регистрации координат. В описываемом здесь предпочтительном осуществлении используют объективное знание ионосферной структуры, включая виртуальные высоты, обеспечиваемое ионосферными зондами или другими средствами, в целях учета и использования многолучевого распространения во время инициирования слежения и во время слежения. В этом состоит отличие от обычных технических решений, при которых только ожидают одно обнаружение на одну цель и не могут воспользоваться дополнительной относящейся к цели информацией, предоставляемой многолучевыми обнаружениями. Улучшение качества слежения вследствие многолучевых обнаружений одной цели имеет важное значение, когда вероятность обнаружения цели по некоторым или всем различным модам распространения невелика. Исходят из того, что состояние цели соответствует уравнению (1), где r является горизонтальной дальностью 8 поверхности земли 9, а является истинным азимутом, r - скорость из 000517 6 менения горизонтальной дальности, и а - скорость изменения истинного азимута. Истинный азимут а является дополнением угла а-, который является углом между проецируемой горизонтальной дальностью r и осью решетки приемника 12, как показано на фиг.5, т.е. а = (90 - а-). Слежение выполняют в наземных координатах,хотя для описания динамики цели и соотнесения ее с другими координатами измерения можно применять другие системы отсчета, например предпочтительную моду распространения. Преобразование между координатами земли и РЛС можно представить как где, во время k, R является измеренной наклонной дальностью, А -измеренным азимутом, D доплеровской скоростью (скорость измерения наклонной дальности), hr - виртуальной ионосферной высотой 53 на канале приема, и ht виртуальной ионосферной высотой 54 на канале передачи согласно фиг.5. Наклонную дальностьR можно определить как половину общей длины канала от передатчика 7 через цель 52 к приемнику 4. Измеренный азимут или угол конусности А является дополнением угла А- между поступающим лучом 57 и осью оси решетки приемника 12. Доплеровская скорость D пропорциональна скорости изменения общей длины канала. Разные моды распространения можно обозначить согласно соответствующему сочетанию исходящей и отраженной моды распространения F0-F0/ F0-F1, F1-F0, , F2-F2 для цели 52 в соответствии с изображением на фиг. 3. Для четырех возможных ионосферных слоев F0, F1,F2, F3 с высотами h0, h1, h2, h3 эти моды можно пронумеровать от 1 до 16, соответственно. Поэтому мы можем записать процесс измерения для разных мод распространения с точки зрения состояния цели x(k) какH(r(k), a(k), r(k); h0, h1), и т.д., и предполагаемое число возможных мод распространения n может изменяться во времени. В приведенных выше уравнениях Wi(k) является нулевым средним, а белая гауссова последовательность с известной ковариацией Ri(k) представляет предполагаемые члены измерения помех. Фактический вид приведенных выше нелинейных функций измерения Hi(.) определяют по геометрии ионосферной модели согласно изображению на фиг.5, и она будет зависеть от виртуальных высот ионосферных слоев hr и ht, 53 и 54, от ме 7 стонахождения и разделения решеток приемника и передатчика 7 и 12 среди прочих факторов. Поскольку виртуальные ионосферные высоты ht на фиг.5 могут быть известны только приблизительно, но предполагается, что они изменяются медленно по сравнению с динамикой цели, то их можно включить в вектор состояния x(k) и оценивать наряду с динамическими переменными, описывающими цель. В этом случае мы вместо уравнения (1) имеем следующее: причем каждая виртуальная высота удовлетворяет уравнениюhi(k+l) = hi(k) + vi(k),(8) где vi(k) является меньшим членом помех процесса. Преобразование в наземную систему отсчета координат требует выбора сочетания исходящей и отраженной моды распространенияFt и Fr с соответствующими виртуальными высотами ht и hr. Обратное преобразование уравнения (5) можно представить в следующем виде: и оно следует из предполагаемой геометрии,указанной на фиг.5. Далее предсказание состояния и соответствующую ковариацию предсказания обозначают как x(kk-1) и P(kk-1), и скорректированную оценку состояния и ковариацию ошибки состояния обозначают как x(kk) и P(kk). В некоторое произвольное время 0 слежение инициируют выбором исходной точки 50,которая может соответствовать до этого не наблюдавшейся цели. Поскольку мода распространения, обусловившая это измерение, предварительно не известна, то исходную оценку состояния цели x(00) для уравнения (1) нельзя получить как следствие уравнения (9), если не предположить данную моду распространения или, эквивалентно, ионосферные высоты для каналов передачи и приема, соответственно. Поэтому предпочтительный способ будет заключаться в инициировании n следящих фильтров - по одному на каждую возможную исходную моду распространения. Каждый фильтр предполагает определенную исходную моду распространения с соответствующими виртуальными высотами hr и ht для присвоения ее исходной оценки состояния с помощью уравне 000517 8 ния (9) на основе первой точки измерения 50. Оценку исходной скорости изменения азимута устанавливают на некоторое начальное значение, обычно нулевое. Исходную ковариацию ошибки состояния Р(00) также присваивают и принимают достаточно крупной, чтобы учесть исходную неопределенность в положении и скорости цели. Возможными являются другие способы инициирования, использующие данные о времени облучения цели от более чем одной радиолокационной станции, но изложенный выше способ среди них самый простой. Можно ожидать, что из числа n фильтров, инициированных по измерению 50, тот фильтр, который основан на правильном предположении исходной моды распространения, будет действовать самым оптимальным образом, и поэтому его оценки состояния будут более точны (в том смысле, что у него в среднем будут меньшие ошибки), чем у других инициированных с ним фильтров. В ходе обработки при наблюдении становится ясно, который, если таковой есть, изn инициированных указанным выше образом фильтров совместим с целью, динамическая модель которой предположительно выражена в уравнении (2). Далее следует описание рекурсивной обработки, требуемой каждым инициированным указанным выше образом фильтром. Цель этой обработки состоит в рекурсивном вычислении приблизительных условных средних x(kk) и ковариационных оценок P(kk) состояния цели на основании данных измерения, включая измерения виртуальной ионосферной высоты, до времени k, Y(1),, Y(k), где Y(i) представляет комплекс измерений, полученных при времени облучения цели i. Оцениваемую траекторию цели представляют графиком значений дальности и азимута по x(kk). Точность траектории указывается размером нормативных отклонений, которые можно получить из ковариации ошибки состояния P(kk). Динамическую модель цели из уравнения(3) используют для предсказания следующего: где появится каждое измерение в течение следующего времени облучения цели при отсутствии помех измерения согласно каждой моде распространения. Предсказание состоянияx(10) во время 1 дано согласно обычной кальмановской фильтрации, описываемой Й. БарШаломом и Т.Э. Фортманном в Слежение и ассоциация данных, изд. Академик Пресс,1988, как(10) с соответствующей ковариацией Р(10) = F(0)P(00)F'(0) + Q(0),(11) где F' есть результат перестановки матрицы переходов F в уравнении (3). Вместо формирования одного строб-импульса 70 используютx(10) для формирования n строб-импульсов 72,74 и 76 в пространстве измерения для каждого следящего фильтра, соответствующих модам 9 распространения F0-F0, F0-F1,, и т.д., согласно фиг.6. Предсказания измерения для соответствующих мод распространения поэтому являются следующими:(12) Соответствующими ковариациями предсказания измерения являются следующиеSn(1) = Jn(1)P(1I0)J'n(1) + Rn(1),(13) где Ji(l) является матрицей Якоби нелинейной функции измерения Hi(.) в уравнении (6), оцениваемой при предсказании состояния x(10). Строб-импульс подтверждения для каждой моды распространения является эллипсоидальной зоной в пространстве RAD, определяемом следующим уравнением:(14) где i определяет размер логического элемента проверки достоверности. Вероятность того, что цель попадает в строб-импульс i, обозначают как РiG, а вероятность обнаружения цели через iую моду распространения обозначают как Рdi. Это изображено на фиг. 6 для трех стробимпульсов 72, 74 и 76, сосредоточенных на предсказаниях измерения 82, 84 и 86 для трех мод распространения F0-F0, F0-F1,, и т.д. Эти строб-импульсы могут перекрываться и могут не перекрываться. Зону подтверждения определяют как объединение строб-импульсов подтверждения или как некоторую зону, которая включает в себя их объединение. Точки, попадающие в строб-импульсы подтверждения признаются как вероятно относящиеся к цели 52 и их используют вместе с предсказанием состояния х(10) для корректировки оценки состояния х(00), чтобы получить x(11). Соответствующую ковариацию ошибки состояния также корректируют относительно Р(11). Этот процесс является рекурсивным и может быть представлен в следующем виде: х(00)x(10)x(11)х(21)P(00)P(10)P(11)P(21)(15) Оценка состояния x(kk) является оценкой минимальной среднеквадратичной ошибки состояния цели x(k), основанной на всей информации 48 в течение времени облучения цели с 0 по k в представленном на фиг.2 виде, включая множественные обнаружения одной и той же цели вследствие многолучевого распространения. Оценка приблизительна, так как она предполагает, что функция плотности распределения вероятностей истинного состояния цели является гауссовой функцией, обусловленной всеми данными измерения. Для определения скорректированного состояния цели x(kk) и его ковариации P(kk) в структуре ассоциации вероятностных данных, 000517 10 описываемой И. Бар-Шаломом и Т.Э. Форманном Слежение и ассоциация данных, изд. Академик Пресс. 1988, используют измерения,попадающие в строб-импульсы 72, 74, 76 и пр.; эта структура кроме измерения от цели или по причине мешающих отраженных сигналов содержит гипотезы ассоциации для возможных мод распространения, которые, возможно, дали эти измерения. Модель наличия или достоверности цели также включают в фильтр, описываемый С.Б. Коулгроувом, А.У. Дэйвисом и Дж. К. Эйлиффом в Журнале инженеров по электротехнике и радиоэлектронике, Австралия, том 6, 3, стр.191-198, 1986, чтобы содействовать слежению (подтверждение, отмена и пр.). Вероятность того, что цель имеется во время k, при условии, что для времени k обеспечены данные,обозначают как PE(kk). Наличие цели моделируют как марковскую цепь двух состояний, и поэтому прогнозируемая вероятность наличия цели PE(kk-l) удовлетворяет следующему уравнению: где две вероятности перехода 0 и 1 определяют следующим образом: 0 = Рr (цель есть во время k цель есть во время k-1); 1 = Рr (цель есть во время k цели нет во время k-1). Предполагается, что произвольное исходное значение РE(00) = 0,5. Для иллюстрации процедуры фильтрации рассмотрим строб-импульсы 72 и 74, относящиеся к модам распространения F0-F0 и F0-F1, и строб-импульс 76, относящийся к моде распространения F1-F1, с соответствующими центрами,которые даны предсказаниями измеренияy1(kk-1), y2(kk-1), и y3(kk-1), 82, 84 и 86. Обозначим эти моды распространения как 1, 2 и 3, соответственно, при обращении к предсказаниям измерения. Предположим, что стробимпульс 72 содержит два измерения y1, y2 90 и что строб-импульс 74 содержит одно измерение у 3 92, а строб-импульс 76 не содержит какихлибо измерений. 7 Гипотез ассоциации (пронумерованы от -1 до 5), которые можно применить:(0) Цель есть, но все проверенные на достоверность измерения y1, y2 и у 3 являются мешающими отраженными сигналами.(1) y1 и у 3 являются мешающими отраженными сигналами, у 2 -обнаружение цели по моде распространения F0-F0.(2) у 2 и у 3 являются мешающими отраженными сигналами, y1 -обнаружение цели по моде распространения F0-F0.(3) у 3 - обнаружение цели по F0-F1, a y1 и у 2 оба являются мешающими отраженными сигналами.(4) у 3 - обнаружение цели по F0-F1, y1 - обнаружение цели по F0-F0, и у 2 мешающий отраженный сигнал.(5) у 3 обнаружение цели по F0-F1, у 2 - обнаружение цели по F0-F0 и y1 мешающий отраженный сигнал. Для каждой из указанных выше возможных гипотез ассоциации условную оценку состояния цели xi(kk) можно сформировать из предсказанной оценки состояния x(kk-1) с помощью расширенной теории кальмановского фильтра, описываемой Г.У. Пулфордом и Р.Дж. Эвансом - Вероятностная ассоциация данных для систем с множественными одновременными измерениями - Автоматика, том 32,9, стр. 1311-1316, 1996. Если пропустить некоторые индексы времени и записать х- = x(kk-1) для уравнения (10), Р- = P(kk-1) для уравнения (11) и у-i = yi(kk-1) для уравнения (12), то условные оценки состояния в этом случае характеризуются следующим образом: где члены J1 и Si выражены в соответствии с уравнением (13). Соответствующие условные ковариации ошибки состояния Pi(kk) характеризуются следующим образом: 12 лов в зоне подтверждения. Также мы допускаем,что вероятность обнаружения цели РD по какойлибо моде распространения является одинаковой, что вероятности PG строб-импульса одинаковы. PD и PG есть параметры, которым даны значения, выбираемые для выявления оптимальных параметров из способа слежения при данных рабочих характеристиках системы 2. Общий объем строб-импульсов проверки достоверности во время k есть Vk. Если два или более строб-импульсов перекрывают друг друга, то Vk можно приближенно посчитать, например, как объем самого большого строб-импульса. Вероятности ассоциации 1(k), определяемые как вероятность соответствующей гипотезы ассоциации i, обусловленная всеми данными измерений вплоть до текущего времени k, можно выразить согласно описанию у Г.У.Пулфорда и Р.Дж. Эванса Вероятностная ассоциация данных для систем с множественными одновременными измерениями, Автоматика, том 32,9, стр. 1311-1316, 1966, следующим образом: где Ny;y-,S является многомерной гауссовой плотностью в у со средним у- и ковариациями S,(k) является нормирующей постоянной, выбранной для обеспечения суммирования вероятностей ассоциации в единицу. Скорректированную оценку состояния цели для фильтра получают суммированием условных оценок состояния с помощью взвешиваний, определяемых их соответствующими вероятностями ассоциации: Ковариацию ошибки состояния P(kk) получают с помощью стандартной методики из гауссовых смесей, описываемой у Й.БарШалома и Т.Э.Фортманна - Слежение и ассоциация данных, изд. Академик Пресс, 1988: где с 1 является масштабным множителем,отражающим возросшую неопределенность в том случае, если цели нет. Вычисление вероятности каждой из ассоциированных гипотез, которую называют вероятностью ассоциации, можно проиллюстрировать, предположив единообразно распределенные измерения мешающих отраженных сигналов в радиолокационном пространстве измерения и пуассоновскую модель согласно описанию у Й. Бар-Шалома и Т.Э. Фортманна Слежение и ассоциация данных, изд. Академик Пресс, 1988, с пространственной плотностьюдля числа точек мешающих отраженных сигна Скорректированную вероятность наличия цели PE(kk) выводят следующим образом:(22) Ведение траектории осуществляют определением пороговой величины вероятности наличия цели следующим образом:PDEL РE (kk)PCON - сохранить траекторию как предположительную,(23) где PDEL и PCON являются пороговыми величинами ведения траектории. Нужно обратить внимание на то, что PDELPCON. Поскольку зна 13 чение PE(kk) может значительно изменяться от одного значения времени облучения до другого,то лучше применять среднее значение PE(kk) по последним нескольким значениям времени облучения цели для подтверждения траектории в уравнении (23). Изложенный выше способ можно легко распространить на произвольные количества измерений, попадающих в строб-импульсы подтверждения, и на произвольные количества мод распространения. В данной структуре можно также удобным образом предусмотреть произвольные функции плотности вероятности мешающих отраженных сигналов и неидентичные строб-импульсы и вероятности обнаружения. Описываемый выше фильтр осуществлен в средствах программного обеспечения с помощью языка программирования С и выполнен на автоматизированном рабочем месте 175 МГц Альфа корпорации Диджитал Экуипмент. В предпочтительном осуществлении предполагают 4 моды распространения, соответствующиеF0-F0, F0-F1, F1-F0 и F1-F1. Виртуальные высоты ионосферных слоев F0-F1 включают в качестве переменных состояния в уравнение (7), и их оценивают по измерениям шума наряду с дальностью, азимутом, скоростью изменения дальности и скоростью изменения азимута цели. Для специалистов данной области будут очевидными многие модификации в пределах данного изобретения, изложенного здесь со ссылкой на сопровождающие чертежи. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ слежения для системы эхосигналов, заключающийся в том, что формируют множество строб-импульсов для соответствующих мод распространения на основе предсказания состояния цели в течение времени облучения цели и формируют оценки состояния цели в течение указанного времени облучения цели на основе точек измерения цели, попадающих в указанные строб-импульсы. 2. Способ слежения по п.1, отличающийся тем, что получают исходные точки измерения цели в течение исходного времени облучения цели,инициируют слежение с помощью получения исходной оценки состояния цели, по меньшей мере, от одной точки из числа указанных исходных точек и определяют указанное предсказание состояния цели в течение времени облучения цели, следующим за указанным исходным временем, на основе указанной оценки состояния цели. 3. Способ слежения по п.2, отличающийся тем, что оценку состояния цели формируют путем применения гипотез ассоциации для указанных точек измерения в указанных стробимпульсах и применения вероятностей ассоциа 000517 14 ции для указанных гипотез, при этом получают условные оценки состояния по точкам измерения для каждой гипотезы и суммируют указанные условные оценки состояния, умноженные на указанные вероятности. 4. Способ слежения по п.3, отличающийся тем, что вероятность наличия РE траектории цели получают, по меньшей мере, от одной из указанных вероятностей ассоциации, и если РE меньше заданного порогового значения, то траекторию цели, поддерживаемую с помощью указанной оценки состояния цели, исключают. 5. Способ слежения по п.4, отличающийся тем, что указанные точки измерения являются вероятными точками обнаружения в пространстве дальность-азимут-доплеровский сдвиг частоты (RAD), полученными в течение времени облучения цели. 6. Способ слежения по п.5, отличающийся тем, что указанное предсказание состояния цели получают на основании указанной оценки состояния цели с помощью линейных уравнений движения. 7. Способ слежения по п.6, отличающийся тем, что строб-импульсы являются стробимпульсами подтверждения, имеющими эллипсоидальную форму в пространстве RAD, и которые получают путем транспонирования указанного предсказания состояния цели в отношении пространства RAD для соответствующих мод распространения для получения предсказания измерения и взаимодействующих ковариаций предсказания для соответствующих мод распространения, определяющих указанные строб-импульсы подтверждения. 8. Способ слежения по п.7, отличающийся тем, что указанные гипотезы включают гипотезу несуществующей цели, при этом точки измерения в указанных строб-импульсах представляют мешающие отраженные сигналы и точка измерения, по меньшей мере, в одном из указанных строб-импульсов представляет обнаружение цели. 9. Способ слежения по любому из пп. с 2 по 8, отличающийся тем, что инициирование слежения выполняют для множества мод распространения, чтобы инициировать множество следящих фильтров путем формирования множества указанных исходных оценок состояния цели. 10. Способ слежения для системы эхосигналов, заключающийся в том, что удлиняют вектор состояния цели для включения дополнительных параметров, связанных с множеством мод распространения, формируют множество строб-импульсов для указанных мод распространения и учитывают неопределенность измерения, связанную с характеристиками траектории распространения для указанных мод, при корректировке оценок состояния цели для времени облучения цели на основе измерений, которые попадают в строб-импульсы.
МПК / Метки
МПК: G01S 13/06
Метки: способ, радиолокационной, слежения, системы
Код ссылки
<a href="https://eas.patents.su/9-517-sposob-slezheniya-dlya-radiolokacionnojj-sistemy.html" rel="bookmark" title="База патентов Евразийского Союза">Способ слежения для радиолокационной системы</a>
Сигарета и способ ее изготовления для электрической курительной системы
Номер патента: 312
Опубликовано: 29.04.1999
Авторы: Каунтс Мэри Эллен, Дейл Джеральд М., Адамс Джон М., Ренн Сюзан Е., Джоунз Дональд, Смит Бэрри С., Харрис Чарльз В., Сандерсон Весли Дж., Кин Билли Дж.Мл., Стивенсон Брет В., Браунштейн Михаил С.
МПК: A24C 5/47, A24F 47/00
Метки: способ, сигарета, изготовления, системы, курительной, электрической
Формула / Реферат:
1. Способ изготовления сигарет, имеющих часть табачного стержня и часть фильтрующего мундштука, при этом часть табачного стержня содержит табачный штранг на одном конце и трубчатый элемент на противоположном конце, и полость между табачным штрангом и трубчатым элементом, при этом способ включает стадии формирования непрерывного табачного стержня путем расположения табачных штрангов двукратной длины и полых штрангов двукратной длины с...
Способ термообработки рельсового стыка, изготовленного с помощью сварки заливкой промежуточного металла, и применение в этом способе системы горелок с определенной компоновкой
Номер патента: 181
Опубликовано: 24.12.1998
Авторы: Штайнхорст Михаэль, Кустер Франк, Скреба Герхард
МПК: C21D 9/04
Метки: системы, термообработки, металла, определенной, стыка, сварки, применение, способе, этом, способ, горелок, рельсового, помощью, изготовленного, заливкой, промежуточного, компоновкой
Формула / Реферат:
1. Способ термообработки рельсового стыка, изготовленного с помощью сварки заливкой промежуточного металла, в частности с целью, по меньшей мере, частичного получения мелкозернистой нормализованной структуры в зоне стыка, отличающийся тем, что нормализацию в зоне соединения концов рельсов проводят непосредственно после завершения процесса сварки, а именно, с наиболее полным использованием остаточного тепла, имеющегося в наплавленном металле и...
Система связи низкой стоимости и большого радиуса действия для обмена данными с удаленными или мобильными полевыми модулями и способ работы такой системы связи
Номер патента: 414
Опубликовано: 24.06.1999
Авторы: Дарби Альберт Д., Белчер Дональд К., Поушок Эндрю Т., Уайт Джеффри Р., Фитцджеральд Брендан Т., Нельсон Родни
МПК: H04B 7/204
Метки: действия, удаленными, системы, обмена, радиуса, система, данными, мобильными, способ, связи, работы, полевыми, низкой, большого, стоимости, модулями
Формула / Реферат:
1. Двухсторонняя беспроводная система передачи данных, содержащая подсистему выходных сообщений для отправки выходных сообщений; подсистему входных сообщений, содержащую сеть, по меньшей мере, из двух работающих на радиочастотах базовых станций для приема входных сообщений, причем указанные базовые станции также непрерывно производят замеры в своих местах расположения комплекта частотных каналов в полосе радиочастот передачи входных сообщений...
Системы обработки контейнеров
Номер патента: 341
Опубликовано: 29.04.1999
Автор: Росс Аллан Симпсон
МПК: B66C 23/36
Метки: системы, контейнеров, обработки
Формула / Реферат:
1. Механизм для погрузки, разгрузки или транспортировки контейнера (7) на и с поддона настила (1), прикрепленного или могущего быть прикрепленным к грузовому автомобилю или трейлеру, причем на каждом конце поддона механизм включает в себя поперечный блок (8), содержащий установленную по центру телескопическую стрелу (12), которая смонтирована на оси поворота (11), отличающийся тем, что нижняя часть (26) стрелы имеет удлинение (28), с которым...
Предыдущий патент: Способ получения окиси алюминия из гидроокиси алюминия
Следующий патент: Экранирующее устройство
Случайный патент: Производные хиназолиндиона, их получение и их различные терапевтические применения