Система автоматического распознавания конфигурации ветви привода и/или количества активных подвижных элементов рабочего органа рабочей машины
Формула / Реферат
1. Система автоматического распознавания передаточного отношения зубчатой передачи, и/или размеров ременных шкивов ременной передачи, служащих для привода рабочего органа сельскохозяйственной уборочной машины, и/или количества активных подвижных элементов рабочего органа сельскохозяйственной уборочной машины, включающая в себя устройство (120) управления, отличающаяся тем, что предусмотрен датчик вибраций, выполненный с возможностью взаимодействия с рабочим органом, и регистрации вибраций, создаваемых движущимся рабочим органом, и передачи выходного сигнала для анализа устройством (120) управления, причем устройство (120) управления выполнено с возможностью определения передаточного отношения зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84, 86), и/или количества активных подвижных элементов рабочего органа путем сравнения упомянутых сигналов датчика вибраций и/или частотного спектра, выведенного на их основании, с банком (130) данных, в котором записаны соответствующие образцы различных передаточных отношений зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи, и/или количеств активных подвижных элементов рабочего органа.
2. Система по п.1, отличающаяся тем, что устройство (120) управления выполнено с возможностью снабжения данными, касающимися входной частоты вращения зубчатой передачи (52) и/или ременной передачи (82, 84, 86) и частоты вращения рабочего элемента, и с использованием отношения между частотой вращения рабочего элемента и входной частотой вращения зубчатой передачи (52) и/или ременной передачи (82, 84, 86), считывания из банка (130) данных, в котором записаны различные отношения и соответствующая информация, и предоставления в качестве исходного значения соответствующего передаточного отношения зубчатой передачи (52), или соответственно размеров ременных шкивов ременной передачи (82, 84, 86), или количества активных подвижных элементов.
3. Система по п.1, отличающаяся тем, что устройство (120) управления выполнено в процессе работы на основании частоты вращения рабочего органа и/или других данных, касающихся частоты вращения рабочего органа, и на основании сигналов датчика вибраций при одной или нескольких верхних составляющих частоты вращения рабочего органа с возможностью определения и предоставления в качестве исходного значения количества подвижных элементов (54) рабочего органа (26), и/или передаточного отношения зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84, 86).
4. Система по п.3, отличающаяся тем, что подвижные элементы (54) рабочего органа (26) расположены в виде нескольких колец, распределенных по окружности рабочего органа, при этом отдельные кольца включают в себя различное количество элементов, при этом устройство (120) управления выполнено дополнительно с возможностью распознавания различных количеств элементов колец.
5. Система по любому из пп.1-4, отличающаяся тем, что рабочим органом является барабан (26) косилки-измельчителя, причем подвижными элементами являются взаимодействующие с противорежущей пластиной (38) измельчающие ножи (54).
6. Система по любому из пп.1-5, отличающаяся тем, что устройство (120) управления выполнено с возможностью управления компонентами сельскохозяйственной уборочной машины, задающими длину сечки, с использованием определяемого количества активных подвижных элементов рабочего органа.
7. Система по любому из пп.1-6, отличающаяся тем, что устройство (120) управления выполнено с возможностью подачи предупреждающего сигнала и/или прерывания эксплуатации сельскохозяйственной уборочной машины, в случае если определено несоответствующее или недопустимое передаточное отношение зубчатой передачи (52), и/или размеры ременных шкивов ременной передачи (82, 84, 86), и/или количество активных подвижных элементов рабочего органа.
8. Сельскохозяйственная уборочная машина (10), оснащенная системой по любому из пп.1-7.
9. Способ автоматического распознавания передаточного отношения зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84, 86), служащих для привода рабочего органа сельскохозяйственной уборочной машины, и/или количества активных подвижных элементов рабочего органа сельскохозяйственной уборочной машины, включающий использование системы по любому из пп.1-7, отличающийся тем, что посредством датчика вибраций осуществляют регистрацию вибраций, создаваемых движущимся рабочим органом, и передачу выходного сигнала устройству (120) управления, посредством устройства (120) управления определяют передаточное отношение зубчатой передачи (52), и/или размеры ременных шкивов ременной передачи (82, 84, 86), и/или количество активных подвижных элементов рабочего органа путем сравнения сигналов датчика и/или частотного спектра, выведенного на их основании, с банком (130) данных, в котором записаны соответствующие образцы различных передаточных отношений зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84, 86), и/или количеств активных подвижных элементов рабочего органа.
10. Способ по п.9, отличающийся тем, что посредством устройства (120) управления определяют передаточное отношение зубчатой передачи (52), и/или размеры ременных шкивов ременной передачи (82, 84, 86), и/или количество активных подвижных элементов рабочего органа непосредственно после изготовления сельскохозяйственной уборочной машины и/или через определенные интервалы времени, например, при приведенном в действие рабочем органе и отсутствии переработки сельскохозяйственного продукта в конце поля.

Текст
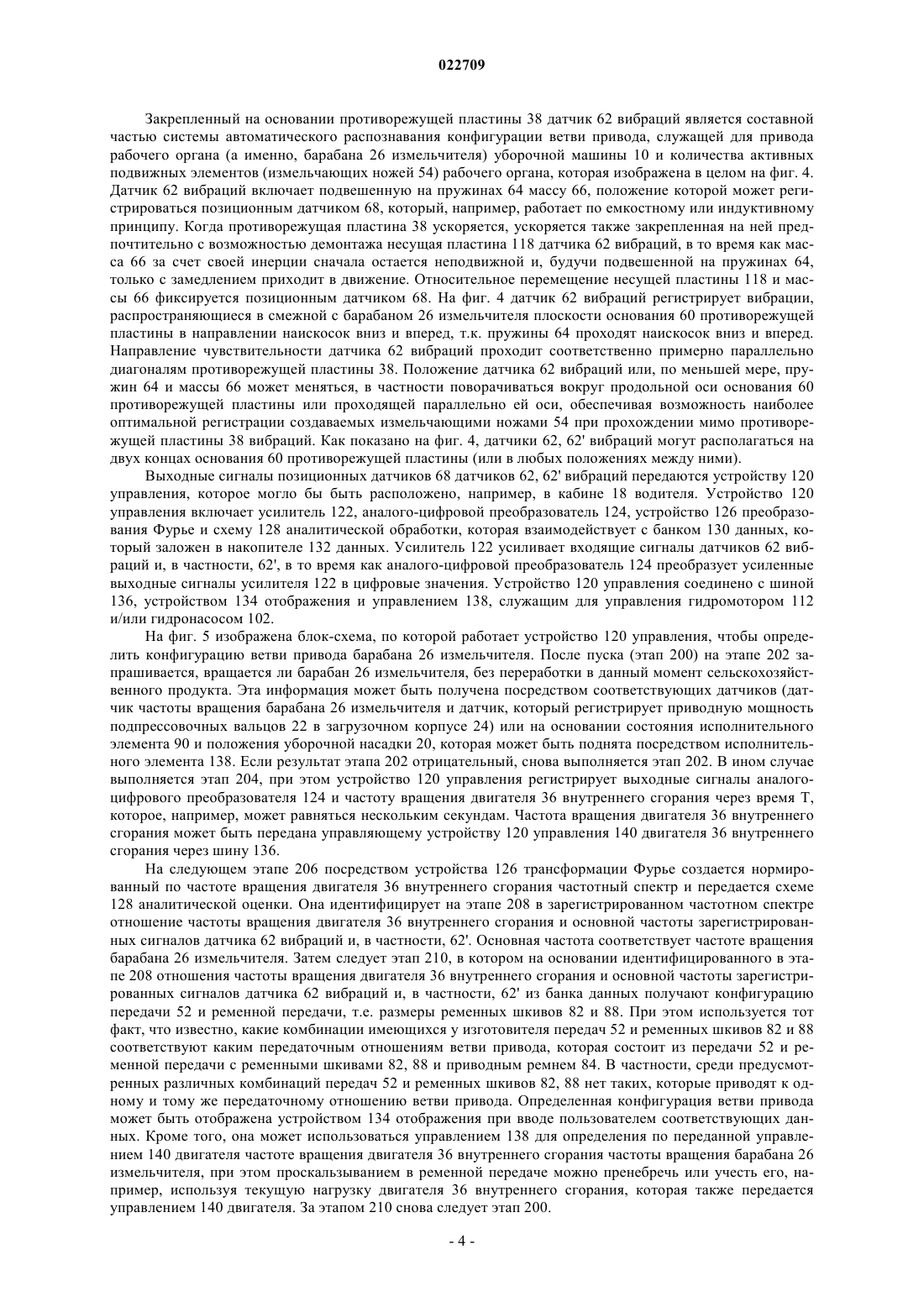
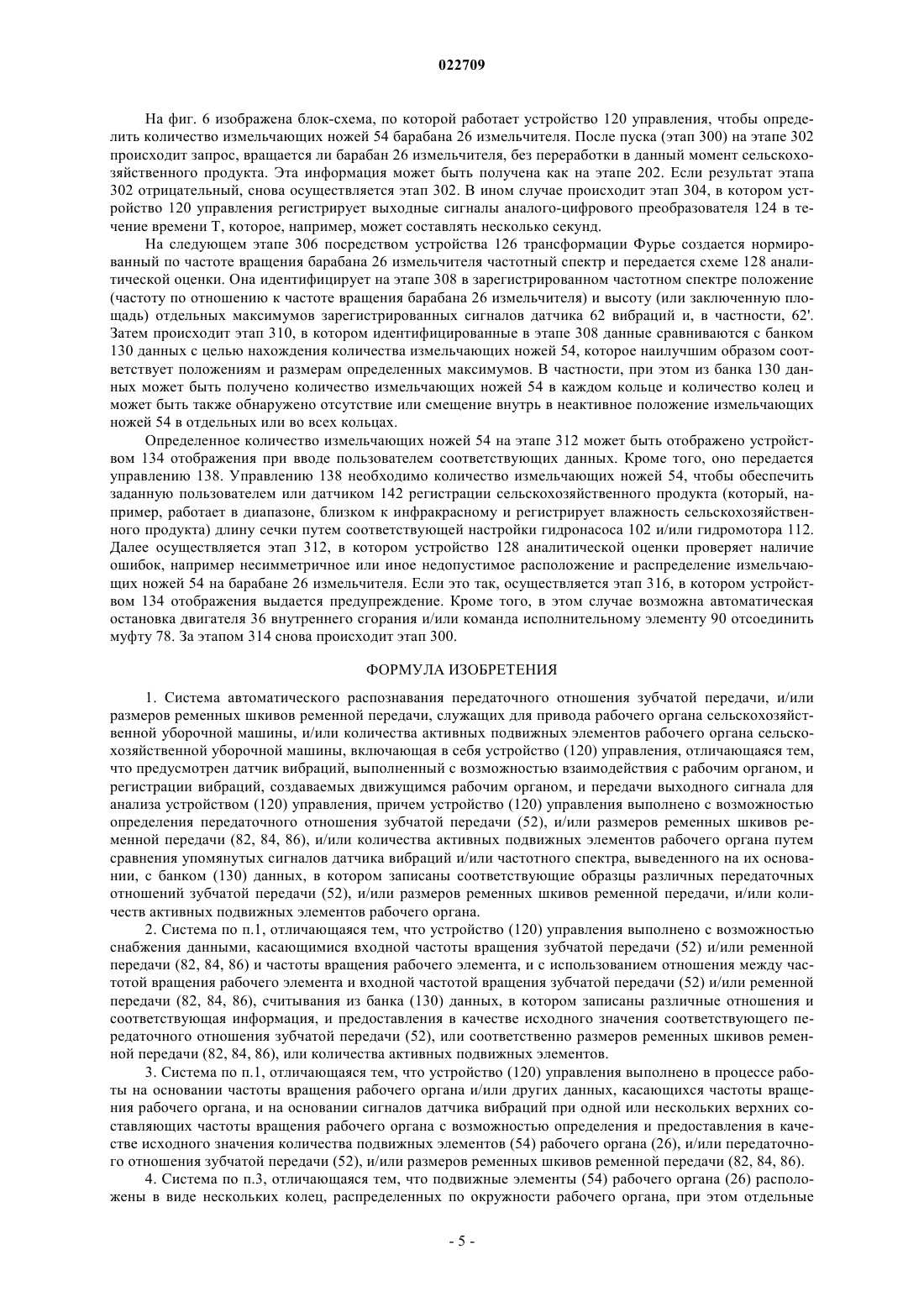
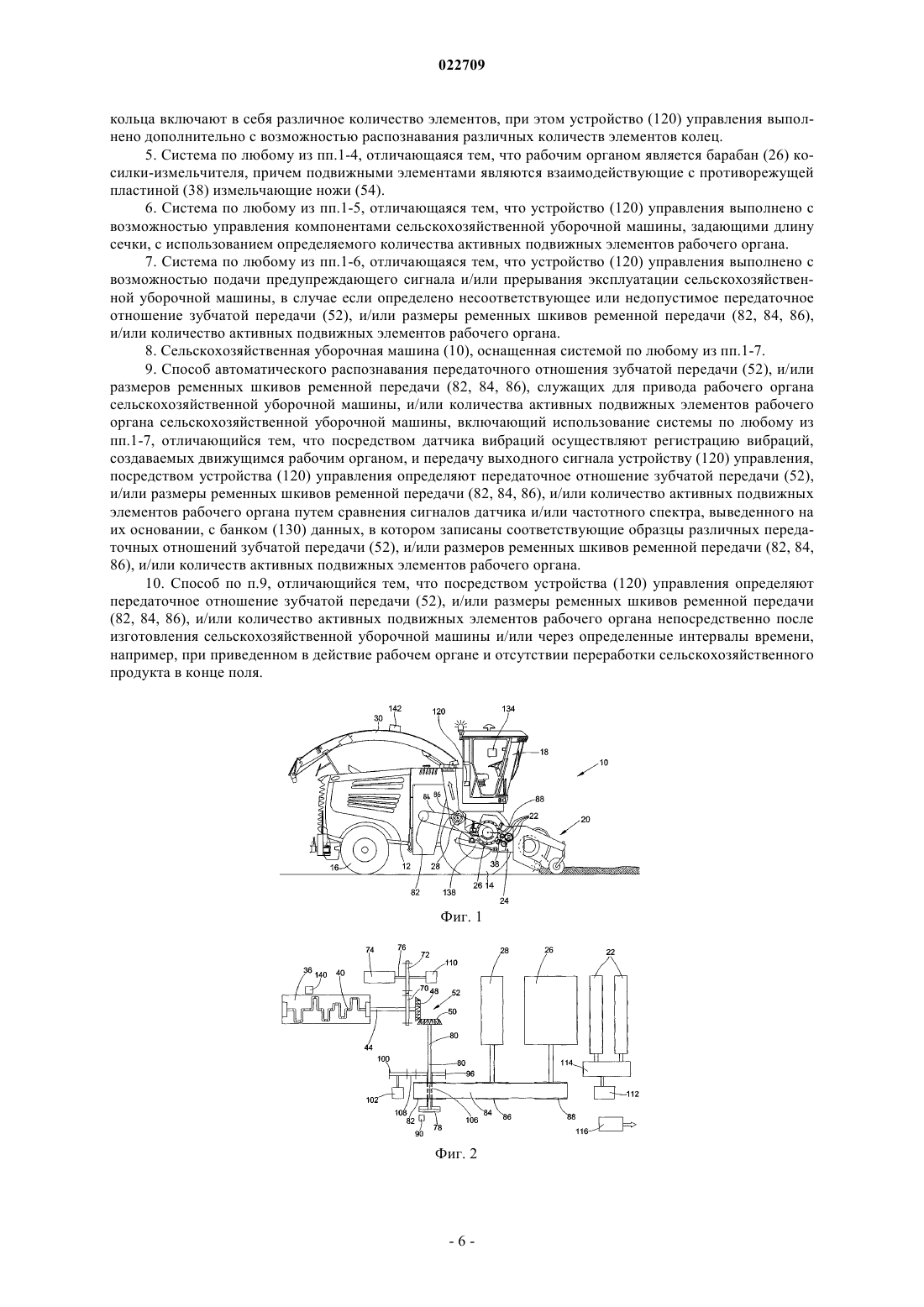
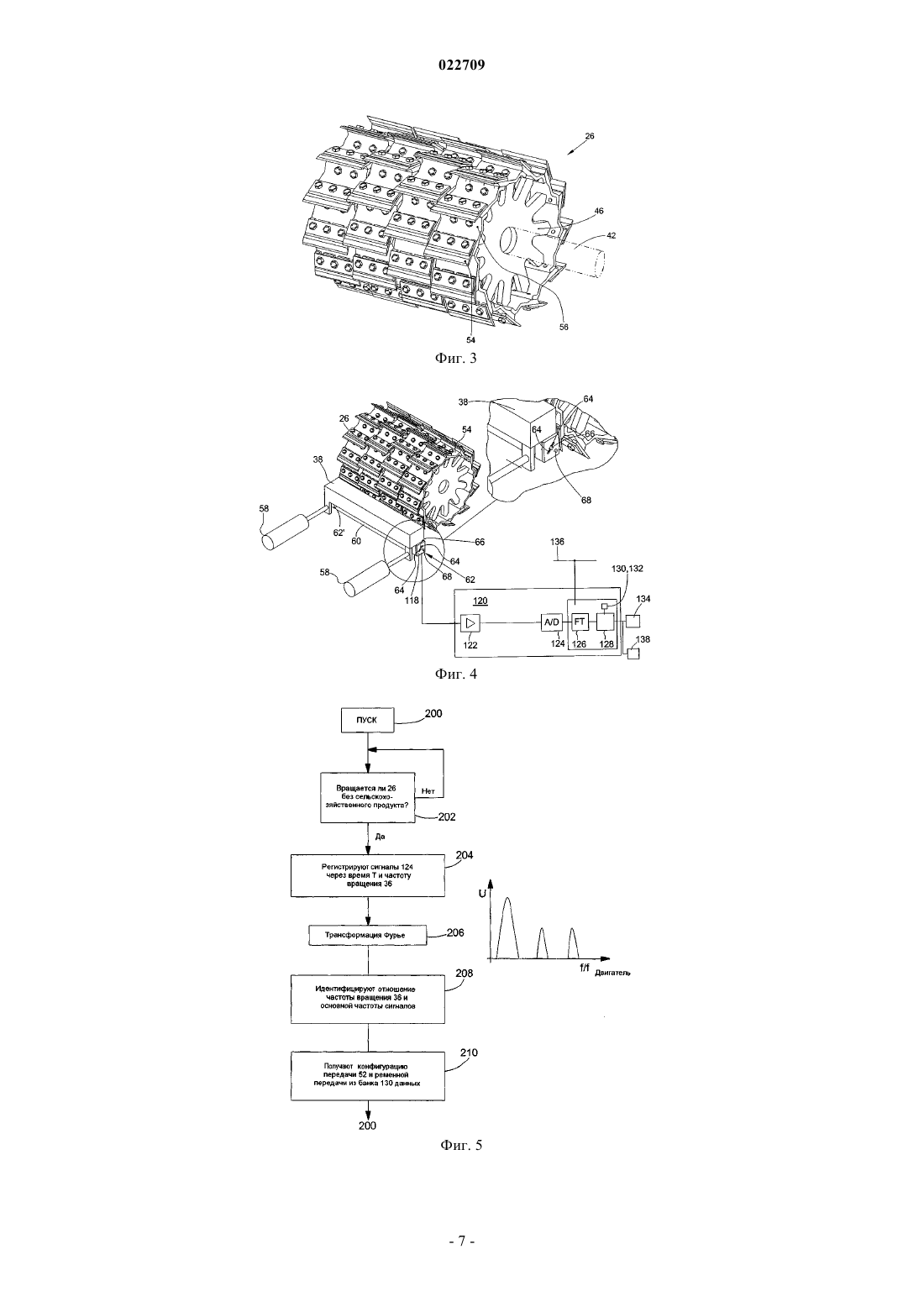
СИСТЕМА АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ КОНФИГУРАЦИИ ВЕТВИ ПРИВОДА И/ИЛИ КОЛИЧЕСТВА АКТИВНЫХ ПОДВИЖНЫХ ЭЛЕМЕНТОВ РАБОЧЕГО ОРГАНА РАБОЧЕЙ МАШИНЫ Система автоматического распознавания конфигурации ветви привода, служащей для привода рабочего органа рабочей машины, и/или количества активных подвижных элементов рабочего органа рабочей машины, которая включает в себя устройство (120) управления и взаимодействующий с рабочим органом датчик. Устройство (120) управления определяет конфигурацию ветви привода и/или количество активных подвижных элементов рабочего органа путем сравнения сигналов датчика и/или выведенных на их основании значений с банком (130) данных, в котором заложены соответствующие образцы различных конфигураций ветви привода и/или количеств активных подвижных элементов рабочего органа.(71)(73) Заявитель и патентовладелец: ДИР ЭНД КОМПАНИ (US) Изобретение касается системы автоматического распознавания конфигурации ветви привода, служащей для привода рабочего органа рабочей машины, и/или количества активных подвижных элементов рабочего органа рабочей машины, включающей устройство управления и взаимодействующий с рабочим органом датчик, выходной сигнал которого содержит анализируемую устройством управления информацию о конфигурации и/или о количестве активных подвижных элементов рабочего органа. Уровень техники Рабочие машины всех видов в настоящее время в возрастающем объеме оснащаются электронными устройствами управления, которые служат для настройки или регулировки эксплуатационных параметров отдельных компонентов рабочей машины. Устройствам управления необходимы, в свою очередь,данные, касающиеся соответствующей конфигурации рабочей машины, чтобы получить возможность ее соответствующего контроля. Чтобы у косилки-измельчителя (силосоуборочного комбайна) получить возможность настраивать длину сечки на желаемую величину путем соответствующей настройки частоты вращения подпрессовывающих вальцов, устройство управления должно располагать информацией,например, относительно коэффициента пропорциональности между зарегистрированной частотой вращения подпрессовывающих вальцов и окружной скоростью подпрессовывающих вальцов, с одной стороны, и количеством ножей барабана измельчителя и его частотой вращения, с другой стороны. Обычно неизменяемые параметры (такие как коэффициент пропорциональности между частотой вращения подпрессовывающих вальцов и окружной скоростью) запрограммированы в устройстве управления жестко или с возможностью изменения, в то время как количество ножей во время изготовления рабочей машины или после ее изменения вносится пользователем в программу устройства управления. При этом возможны ошибки, вследствие которых, в свою очередь, возникают нежелательные функциональные проблемы рабочей машины, у косилки-измельчителя, например, слишком малая или слишком большая длина сечки. Предлагалось также у косилки-измельчителя определять количество ножей с помощью не описанной подробно сенсорной техники для корректной автоматической настройки длины сечки (DE 19632977 А 1). Кроме того, предлагалось у сельскохозяйственных рабочих машин регистрировать вибрации и по их частотам относить их к определенным конструктивным элементам (ЕР 1221280 А 1). Для этого аналитическому устройству должна быть уже известна их частота вращения или передаточное отношение, с которым они приводятся в действие двигателем внутреннего сгорания. И здесь существует соответственно возможность ошибок, если при монтаже рабочей машины или после модернизации по ошибке вводятся неправильные данные, касающиеся передаточного отношения. Проблема, лежащая в основе изобретения, видится в том, чтобы представить систему и способ, которые без больших затрат позволят автоматически распознавать конфигурацию ветви привода, служащей для привода рабочего органа рабочей машины, и/или количество активных подвижных элементов рабочего органа. Эта проблема в соответствии с изобретением решается с помощью признаков, изложенных в формуле изобретения, где также приведены признаки, которые совершенствуют это решение предпочтительным образом. Система автоматического распознавания конфигурации ветви привода, служащей для привода рабочего органа рабочей машины, и/или количества активных подвижных элементов рабочего органа рабочей машины и соответствующий способ включают электронное устройство управления и взаимодействующий с рабочим органом датчик. Выходной сигнал этого датчика содержит информацию относительно конфигурации ветви привода и/или количества активных подвижных элементов рабочего органа. Устройство управления сравнивает в процессе работы сигналы датчика и/или выведенные на их основании параметры, например частотный спектр, с банком данных, в котором заложены соответствующие образцы различных предусмотренных изготовителем рабочей машины конфигураций ветви привода и/или количеств активных подвижных элементов рабочего органа. Обнаруживается наилучшим образом подходящий к зарегистрированным сигналам и/или выведенным на их основании параметрам образец,сохраненный в банке данных, и устройство управления выдает затем исходные данные, касающиеся конфигурации ветви привода и/или количества активных подвижных элементов рабочего органа. Таким образом, без затруднений возможно автоматическое определение конфигурации ветви привода и/или количества активных подвижных элементов рабочего органа, даже когда изготовителем предусмотрено множество возможных конфигураций или соответственно количеств активных подвижных элементов. Автоматическое определение обладает тем преимуществом, что отсутствует возможность ошибочного ввода данных пользователем или производственным персоналом, при этом возможные изменения в случае модернизации рабочей машины могут быть распознаны автоматически. При определении конфигурации ветви привода предлагается снабдить устройство управления данными, касающимися входной частоты вращения ветви привода и частоты вращения рабочего органа. Устройство управления использует отношение между частотой вращения рабочего элемента и входной частотой вращения ветви привода в качестве параметра, чтобы получить из банка данных соответствующую конфигурацию ветви привода. Для этого в банке данных заложены различные отношения между частотой вращения рабочего элемента и входной частотой вращения ветви привода и соответствующие конфигурации. Примерами получаемых из банка данных конфигураций могут являться у зубчатой передачи ее передаточное отношение (или количества зубьев), а у ременной передачи - размеры ременных шкивов. При этом используется тот факт, что изготовителем применяются только определенные количества зубьев и передаточные отношения или соответственно размеры ременных шкивов. В одном из предпочтительных вариантов осуществления изобретения в качестве датчика используется датчик вибраций, который предназначен для регистрации создаваемых движущимся рабочим органом вибраций. Сигналы такого датчика могут служить для определения частоты вращения рабочего органа, при этом на их основании определяется основная частота, которая, в свою очередь, соответствует частоте вращения рабочего органа. Альтернативно или дополнительно устройством управления могут также использоваться другие данные, касающиеся частоты вращения рабочего органа, такие как вышеупомянутые передаточное отношение ветви привода рабочего органа и его входная частота вращения. Кроме того, устройством управления анализируются сигналы датчика при одной или нескольких (гармонических) верхних составляющих основной частоты, чтобы путем сравнения сигналов датчика при одной или нескольких верхних составляющих основной частоты с соответствующими сохраненными в банке данных образцами определить количество подвижных элементов рабочего органа и предоставить его в качестве исходного значения. Здесь используется тот факт, что зарегистрированные амплитуды сигналов при высших гармониках n-го порядка зависят от количества n подвижных элементов. Если, например, только по объему рабочего органа распределены два элемента, следует ожидать относительно высокой амплитуды при удвоенной основной частоте. Если, аналогично, по объему рабочего органа распределены 123 элемента, следует ожидать относительно высокой амплитуды при 123 кратной основной частоте. Другое усовершенствование предусматривает, что элементы рабочего органа расположены несколькими распределенными вокруг рабочего органа кольцами. Отдельные кольца могут включать различное количество элементов. Устройство управления в этом случае дополнительно рассчитано на то,чтобы распознавать различные количества элементов колец. Характерным случаем такого применения могла бы быть так называемая голландская конфигурация барабана измельчителя, в которой в двух средних из четырех колец измельчающих ножей каждый второй нож снимается или приводится в неактивное, т.е. задвинутое внутрь положение, так что он не взаимодействует с сельскохозяйственным продуктом. Предпочтительное применение настоящего изобретения осуществляется в косилке-измельчителе,при этом рабочим органом косилки-измельчителя является барабан измельчителя, а подвижными элементами, взаимодействующими с противорежущей пластиной, являются измельчающие ножи. Даже по ошибке оказавшиеся в неактивном положении (пробуксовывающие) ножи распознаются с помощью предлагаемой изобретением системы и могут быть показаны пользователю для корректировки. Но возможны и другие области применения в сельскохозяйственных уборочных машинах, например для распознавания количества молотильных планок молотильного барабана или ножей соломорезки комбайна. Автоматически распознанная конфигурация ветви привода может также служить для аналитической оценки спектров вибрации с целью распознавания возможной ошибки (см. ЕР 1221280 А 1, описание которого посредством данной ссылки включается в описание настоящего изобретения). Предлагается использовать автоматически распознанное устройством управления количество активных подвижных элементов рабочего органа для управления другими компонентами рабочей машины,например для настройки или регулировки введенной вручную или заданной с помощью датчика длины сечки. Кроме того, предлагается, чтобы устройство управления подавало предупреждающий сигнал и/или прерывало эксплуатацию рабочей машины, в случае если определяется несоответствующая или недопустимая конфигурация ветви привода и/или количество активных подвижных элементов рабочего органа. Таким образом можно, например, предотвратить, чтобы приводился в действие ножевой барабан косилки-измельчителя, который по ошибке только на половину объема оснащен измельчающими ножами. Устройство управления может определять конфигурацию ветви привода и/или количество активных подвижных элементов рабочего органа непосредственно после изготовления рабочей машины еще на поточной линии. Там может также происходить сравнение с банком данных заказчика, чтобы гарантировать, что на рабочей машине была смонтирована заказанная или соответствующая правильная конфигурация. Тем самым предотвращаются и могут быть также дополнительно проанализированы, в случае регрессионных требований, ошибки перед отгрузкой, для чего изготовителю следует сохранить в базе определенную конфигурацию. Кроме того, конфигурация ветви привода и/или количество активных подвижных элементов рабочего органа может определяться через определенные интервалы времени,например при приведенном в действие рабочем органе и отсутствии переработки сельскохозяйственного продукта в конце поля. Пример осуществления С помощью графических изображений далее поясняется один из примеров осуществления изобретения, при этом показано: фиг. 1 - схематичный вид сбоку самоходной уборочной машины, представляющей собой косилкуизмельчитель,фиг. 2 - схематичный вид сверху приводной системы уборочной машины,фиг. 3 - вид в перспективе барабана измельчителя,фиг. 4 - вид в перспективе барабана измельчителя с противорежущей пластиной и датчиком,фиг. 5 - блок-схема, по которой работает устройство управления при автоматическом определении конфигурации ветви привода барабана измельчителя, и фиг. 6 - блок-схема, по которой работает устройство управления при автоматическом определении количества измельчающих ножей барабана измельчителя. На фиг. 1 в качестве примера рабочей машины изображена уборочная машина 10, представляющая собой самоходную косилку-измельчитель, на схематичном виде сбоку. Уборочная машина 10 состоит из рамы 12, которая опирается на передние приводные колеса 14 и управляемые задние колеса 16. Обслуживание уборочной машины 10 осуществляется из кабины 18 водителя, из которой видна уборочная насадка 20, представляющая собой подборщик. Подбираемый посредством уборочной насадки 20 с земли сельскохозяйственный продукт, например трава или тому подобное, по загрузочному транспортеру 22 с подпрессовочными вальцами, которые расположены внутри загрузочного корпуса 24 с фронтальной стороны косилки-измельчителя 10, подается в расположенный под кабиной 18 водителя, являющийся рабочим органом барабан 26 измельчителя, который измельчает ее на мелкие куски и загружает в устройство 28 подачи. Продукт выходит из уборочной машины 10 на едущее рядом транспортное средство через вращающуюся вокруг практически вертикальной оси разгрузочную шахту 30 с регулируемым углом наклона. Приведенные ниже данные направлений, такие как боковое, нижнее и верхнее, указаны относительно направления V движения вперед уборочной машины 10, которое на фиг. 1 проходит вправо. На фиг. 2 показан вид сверху приводной системы уборочной машины 10. В задней области уборочной машины 10 находится расположенный с задней стороны заднего моста двигатель 36 внутреннего сгорания,который, в частности, представляет собой дизельный двигатель и соединен с лонжеронами и/или поперечинами рамы 12. Коленчатый вал 40 двигателя 36 внутреннего сгорания проходит в переднем направлении уборочной машины 10 и выступает вперед из картера двигателя 36 внутреннего сгорания. Двигатель 36 внутреннего сгорания во время эксплуатации своим коленчатым валом 40 приводит в действие продольный вал 44, который соединен с входным коническим зубчатым колесом 48 передачи 52. Продольный вал 44 через зубчатые колеса 70, 72 и другой вал 7 6 приводит в действие насосный агрегат 74, который включает гидронасос для привода гидромоторов, обеспечивающих движение уборочной машины, насос управления и гидронасос для снабжения маслом управления гидростатического привода движения уборочной машины 10, и первый гидронасос 110, который предназначен для привода первого гидромотора 116, служащего для привода уборочной насадки 20. Возможен также привод через зубчатые колеса 70, 72 или расположенное между ними зубчатое колесо (не показано) других постоянно приводимых в действие элементов, таких как электрический генератор и/или привод воздуходувки для подвода охлаждающего воздуха для двигателя 36 внутреннего сгорания. Выходное коническое зубчатое колесо 50 передачи 52 соединено с поперечным валом 80, который проходит сквозь расположенный соосно на ременном шкиве 82 полый вал 106 и на удаленной от передачи 52 стороне ременного шкива 82 соединен с муфтой 78. Охватывая ременный шкив 82, движется приводной ремень 84, который также охватывает при движении ременный шкив 88 привода барабана 26 измельчителя и ременный шкив 86 привода устройства 28 подачи. Муфта 78 на выходе соединена с полым валом 106, который, кроме того, на обращенной к передаче 52 стороне ременного шкива 82 через зубчатые колеса 96, 108 и 100 приводит в действие второй гидронасос 102, служащий для привода второго гидромотора 112, который приводит в действие загрузочный транспортер 22 через передачу 114. Управляемая посредством исполнительного элемента 90 муфта 78 позволяет соединить приводной ремень 84,вместе с ним барабан 26 измельчителя и устройство 28 подачи с поперечным валом 80, чтобы осуществлять их привод при уборке урожая или отсоединять их от него. Барабан 26 измельчителя взаимодействует с противорежущей пластиной 38. На фиг. 3 показан вид в перспективе барабана 26 измельчителя. Он включает установленный на опорах в раме 12 с возможностью вращения вал 42, на котором смонтированы опорные диски 46, по периметру которых распределены измельчающие ножи 54. Измельчающие ножи 54 привернуты к ножедержателям 56, которые, как здесь изображено, привернуты к опорным дискам 46. Но ножедержатели 56 могли бы также собственно известным образом быть приварены к отдельному корпусу барабана (не показан). В изображенном варианте осуществления измельчающие ножи 54 расположены четырьмя кольцами по 12 измельчающих ножей каждое, при этом измельчающие ножи 54 отдельных колец расположены с угловым смещением друг относительно друга. Теперь ссылаемся на фиг. 4. Противорежущая пластина 38 снабжена перестановочным устройством 58, которое предназначено для передвижения противорежущей пластины 38 в горизонтальном направлении к барабану 26 измельчителя и от него. Оно служит для настройки размера зазора между ножами. На двух боковых концах служащего опорой для противорежущей пластины 38 на раму 12 основания 60 противорежущей пластины расположено по одному датчику 62 вибраций. Закрепленный на основании противорежущей пластины 38 датчик 62 вибраций является составной частью системы автоматического распознавания конфигурации ветви привода, служащей для привода рабочего органа (а именно, барабана 26 измельчителя) уборочной машины 10 и количества активных подвижных элементов (измельчающих ножей 54) рабочего органа, которая изображена в целом на фиг. 4. Датчик 62 вибраций включает подвешенную на пружинах 64 массу 66, положение которой может регистрироваться позиционным датчиком 68, который, например, работает по емкостному или индуктивному принципу. Когда противорежущая пластина 38 ускоряется, ускоряется также закрепленная на ней предпочтительно с возможностью демонтажа несущая пластина 118 датчика 62 вибраций, в то время как масса 66 за счет своей инерции сначала остается неподвижной и, будучи подвешенной на пружинах 64,только с замедлением приходит в движение. Относительное перемещение несущей пластины 118 и массы 66 фиксируется позиционным датчиком 68. На фиг. 4 датчик 62 вибраций регистрирует вибрации,распространяющиеся в смежной с барабаном 26 измельчителя плоскости основания 60 противорежущей пластины в направлении наискосок вниз и вперед, т.к. пружины 64 проходят наискосок вниз и вперед. Направление чувствительности датчика 62 вибраций проходит соответственно примерно параллельно диагоналям противорежущей пластины 38. Положение датчика 62 вибраций или, по меньшей мере, пружин 64 и массы 66 может меняться, в частности поворачиваться вокруг продольной оси основания 60 противорежущей пластины или проходящей параллельно ей оси, обеспечивая возможность наиболее оптимальной регистрации создаваемых измельчающими ножами 54 при прохождении мимо противорежущей пластины 38 вибраций. Как показано на фиг. 4, датчики 62, 62' вибраций могут располагаться на двух концах основания 60 противорежущей пластины (или в любых положениях между ними). Выходные сигналы позиционных датчиков 68 датчиков 62, 62' вибраций передаются устройству 120 управления, которое могло бы быть расположено, например, в кабине 18 водителя. Устройство 120 управления включает усилитель 122, аналого-цифровой преобразователь 124, устройство 126 преобразования Фурье и схему 128 аналитической обработки, которая взаимодействует с банком 130 данных, который заложен в накопителе 132 данных. Усилитель 122 усиливает входящие сигналы датчиков 62 вибраций и, в частности, 62', в то время как аналого-цифровой преобразователь 124 преобразует усиленные выходные сигналы усилителя 122 в цифровые значения. Устройство 120 управления соединено с шиной 136, устройством 134 отображения и управлением 138, служащим для управления гидромотором 112 и/или гидронасосом 102. На фиг. 5 изображена блок-схема, по которой работает устройство 120 управления, чтобы определить конфигурацию ветви привода барабана 26 измельчителя. После пуска (этап 200) на этапе 202 запрашивается, вращается ли барабан 26 измельчителя, без переработки в данный момент сельскохозяйственного продукта. Эта информация может быть получена посредством соответствующих датчиков (датчик частоты вращения барабана 26 измельчителя и датчик, который регистрирует приводную мощность подпрессовочных вальцов 22 в загрузочном корпусе 24) или на основании состояния исполнительного элемента 90 и положения уборочной насадки 20, которая может быть поднята посредством исполнительного элемента 138. Если результат этапа 202 отрицательный, снова выполняется этап 202. В ином случае выполняется этап 204, при этом устройство 120 управления регистрирует выходные сигналы аналогоцифрового преобразователя 124 и частоту вращения двигателя 36 внутреннего сгорания через время Т,которое, например, может равняться нескольким секундам. Частота вращения двигателя 36 внутреннего сгорания может быть передана управляющему устройству 120 управления 140 двигателя 36 внутреннего сгорания через шину 136. На следующем этапе 206 посредством устройства 126 трансформации Фурье создается нормированный по частоте вращения двигателя 36 внутреннего сгорания частотный спектр и передается схеме 128 аналитической оценки. Она идентифицирует на этапе 208 в зарегистрированном частотном спектре отношение частоты вращения двигателя 36 внутреннего сгорания и основной частоты зарегистрированных сигналов датчика 62 вибраций и, в частности, 62'. Основная частота соответствует частоте вращения барабана 26 измельчителя. Затем следует этап 210, в котором на основании идентифицированного в этапе 208 отношения частоты вращения двигателя 36 внутреннего сгорания и основной частоты зарегистрированных сигналов датчика 62 вибраций и, в частности, 62' из банка данных получают конфигурацию передачи 52 и ременной передачи, т.е. размеры ременных шкивов 82 и 88. При этом используется тот факт, что известно, какие комбинации имеющихся у изготовителя передач 52 и ременных шкивов 82 и 88 соответствуют каким передаточным отношениям ветви привода, которая состоит из передачи 52 и ременной передачи с ременными шкивами 82, 88 и приводным ремнем 84. В частности, среди предусмотренных различных комбинаций передач 52 и ременных шкивов 82, 88 нет таких, которые приводят к одному и тому же передаточному отношению ветви привода. Определенная конфигурация ветви привода может быть отображена устройством 134 отображения при вводе пользователем соответствующих данных. Кроме того, она может использоваться управлением 138 для определения по переданной управлением 140 двигателя частоте вращения двигателя 36 внутреннего сгорания частоты вращения барабана 26 измельчителя, при этом проскальзыванием в ременной передаче можно пренебречь или учесть его, например, используя текущую нагрузку двигателя 36 внутреннего сгорания, которая также передается управлением 140 двигателя. За этапом 210 снова следует этап 200. На фиг. 6 изображена блок-схема, по которой работает устройство 120 управления, чтобы определить количество измельчающих ножей 54 барабана 26 измельчителя. После пуска (этап 300) на этапе 302 происходит запрос, вращается ли барабан 26 измельчителя, без переработки в данный момент сельскохозяйственного продукта. Эта информация может быть получена как на этапе 202. Если результат этапа 302 отрицательный, снова осуществляется этап 302. В ином случае происходит этап 304, в котором устройство 120 управления регистрирует выходные сигналы аналого-цифрового преобразователя 124 в течение времени Т, которое, например, может составлять несколько секунд. На следующем этапе 306 посредством устройства 126 трансформации Фурье создается нормированный по частоте вращения барабана 26 измельчителя частотный спектр и передается схеме 128 аналитической оценки. Она идентифицирует на этапе 308 в зарегистрированном частотном спектре положение(частоту по отношению к частоте вращения барабана 26 измельчителя) и высоту (или заключенную площадь) отдельных максимумов зарегистрированных сигналов датчика 62 вибраций и, в частности, 62'. Затем происходит этап 310, в котором идентифицированные в этапе 308 данные сравниваются с банком 130 данных с целью нахождения количества измельчающих ножей 54, которое наилучшим образом соответствует положениям и размерам определенных максимумов. В частности, при этом из банка 130 данных может быть получено количество измельчающих ножей 54 в каждом кольце и количество колец и может быть также обнаружено отсутствие или смещение внутрь в неактивное положение измельчающих ножей 54 в отдельных или во всех кольцах. Определенное количество измельчающих ножей 54 на этапе 312 может быть отображено устройством 134 отображения при вводе пользователем соответствующих данных. Кроме того, оно передается управлению 138. Управлению 138 необходимо количество измельчающих ножей 54, чтобы обеспечить заданную пользователем или датчиком 142 регистрации сельскохозяйственного продукта (который, например, работает в диапазоне, близком к инфракрасному и регистрирует влажность сельскохозяйственного продукта) длину сечки путем соответствующей настройки гидронасоса 102 и/или гидромотора 112. Далее осуществляется этап 312, в котором устройство 128 аналитической оценки проверяет наличие ошибок, например несимметричное или иное недопустимое расположение и распределение измельчающих ножей 54 на барабане 26 измельчителя. Если это так, осуществляется этап 316, в котором устройством 134 отображения выдается предупреждение. Кроме того, в этом случае возможна автоматическая остановка двигателя 36 внутреннего сгорания и/или команда исполнительному элементу 90 отсоединить муфту 78. За этапом 314 снова происходит этап 300. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система автоматического распознавания передаточного отношения зубчатой передачи, и/или размеров ременных шкивов ременной передачи, служащих для привода рабочего органа сельскохозяйственной уборочной машины, и/или количества активных подвижных элементов рабочего органа сельскохозяйственной уборочной машины, включающая в себя устройство (120) управления, отличающаяся тем,что предусмотрен датчик вибраций, выполненный с возможностью взаимодействия с рабочим органом, и регистрации вибраций, создаваемых движущимся рабочим органом, и передачи выходного сигнала для анализа устройством (120) управления, причем устройство (120) управления выполнено с возможностью определения передаточного отношения зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84, 86), и/или количества активных подвижных элементов рабочего органа путем сравнения упомянутых сигналов датчика вибраций и/или частотного спектра, выведенного на их основании, с банком (130) данных, в котором записаны соответствующие образцы различных передаточных отношений зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи, и/или количеств активных подвижных элементов рабочего органа. 2. Система по п.1, отличающаяся тем, что устройство (120) управления выполнено с возможностью снабжения данными, касающимися входной частоты вращения зубчатой передачи (52) и/или ременной передачи (82, 84, 86) и частоты вращения рабочего элемента, и с использованием отношения между частотой вращения рабочего элемента и входной частотой вращения зубчатой передачи (52) и/или ременной передачи (82, 84, 86), считывания из банка (130) данных, в котором записаны различные отношения и соответствующая информация, и предоставления в качестве исходного значения соответствующего передаточного отношения зубчатой передачи (52), или соответственно размеров ременных шкивов ременной передачи (82, 84, 86), или количества активных подвижных элементов. 3. Система по п.1, отличающаяся тем, что устройство (120) управления выполнено в процессе работы на основании частоты вращения рабочего органа и/или других данных, касающихся частоты вращения рабочего органа, и на основании сигналов датчика вибраций при одной или нескольких верхних составляющих частоты вращения рабочего органа с возможностью определения и предоставления в качестве исходного значения количества подвижных элементов (54) рабочего органа (26), и/или передаточного отношения зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84, 86). 4. Система по п.3, отличающаяся тем, что подвижные элементы (54) рабочего органа (26) расположены в виде нескольких колец, распределенных по окружности рабочего органа, при этом отдельные кольца включают в себя различное количество элементов, при этом устройство (120) управления выполнено дополнительно с возможностью распознавания различных количеств элементов колец. 5. Система по любому из пп.1-4, отличающаяся тем, что рабочим органом является барабан (26) косилки-измельчителя, причем подвижными элементами являются взаимодействующие с противорежущей пластиной (38) измельчающие ножи (54). 6. Система по любому из пп.1-5, отличающаяся тем, что устройство (120) управления выполнено с возможностью управления компонентами сельскохозяйственной уборочной машины, задающими длину сечки, с использованием определяемого количества активных подвижных элементов рабочего органа. 7. Система по любому из пп.1-6, отличающаяся тем, что устройство (120) управления выполнено с возможностью подачи предупреждающего сигнала и/или прерывания эксплуатации сельскохозяйственной уборочной машины, в случае если определено несоответствующее или недопустимое передаточное отношение зубчатой передачи (52), и/или размеры ременных шкивов ременной передачи (82, 84, 86),и/или количество активных подвижных элементов рабочего органа. 8. Сельскохозяйственная уборочная машина (10), оснащенная системой по любому из пп.1-7. 9. Способ автоматического распознавания передаточного отношения зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84, 86), служащих для привода рабочего органа сельскохозяйственной уборочной машины, и/или количества активных подвижных элементов рабочего органа сельскохозяйственной уборочной машины, включающий использование системы по любому из пп.1-7, отличающийся тем, что посредством датчика вибраций осуществляют регистрацию вибраций,создаваемых движущимся рабочим органом, и передачу выходного сигнала устройству (120) управления,посредством устройства (120) управления определяют передаточное отношение зубчатой передачи (52),и/или размеры ременных шкивов ременной передачи (82, 84, 86), и/или количество активных подвижных элементов рабочего органа путем сравнения сигналов датчика и/или частотного спектра, выведенного на их основании, с банком (130) данных, в котором записаны соответствующие образцы различных передаточных отношений зубчатой передачи (52), и/или размеров ременных шкивов ременной передачи (82, 84,86), и/или количеств активных подвижных элементов рабочего органа. 10. Способ по п.9, отличающийся тем, что посредством устройства (120) управления определяют передаточное отношение зубчатой передачи (52), и/или размеры ременных шкивов ременной передачи(82, 84, 86), и/или количество активных подвижных элементов рабочего органа непосредственно после изготовления сельскохозяйственной уборочной машины и/или через определенные интервалы времени,например, при приведенном в действие рабочем органе и отсутствии переработки сельскохозяйственного продукта в конце поля.
МПК / Метки
МПК: A01D 41/127, A01D 41/06
Метки: активных, автоматического, распознавания, система, привода, рабочей, количества, машины, подвижных, ветви, органа, конфигурации, элементов, рабочего
Код ссылки
<a href="https://eas.patents.su/9-22709-sistema-avtomaticheskogo-raspoznavaniya-konfiguracii-vetvi-privoda-i-ili-kolichestva-aktivnyh-podvizhnyh-elementov-rabochego-organa-rabochejj-mashiny.html" rel="bookmark" title="База патентов Евразийского Союза">Система автоматического распознавания конфигурации ветви привода и/или количества активных подвижных элементов рабочего органа рабочей машины</a>
Система для защиты рабочего органа перегрузочной машины от столкновения с препятствием
Номер патента: 15532
Опубликовано: 31.08.2011
Авторы: Николаев Вячеслав Викторович, Дунаев Вадим Игоревич, Иголкин Виталий Алексеевич, Федосовский Михаил Евгеньевич
МПК: G21C 19/19
Метки: система, защиты, органа, столкновения, перегрузочной, препятствием, машины, рабочего
Формула / Реферат:
1. Система для защиты от столкновения с препятствием рабочих органов перегрузочной машины для перегрузки ядерного топлива, содержащая датчики (6) положения, размещенные по периферии рабочих органов,отличающаяся тем, что она содержитопорную раму (1), имеющую опорную поверхность и выполненную с возможностью прикрепления под перегрузочной машиной,подвижный каркас (2), содержащий верхнюю раму (7), размещенную с опорой на опорную поверхность опорной...
Система привода рабочего транспортного средства
Номер патента: 17546
Опубликовано: 30.01.2013
Автор: Борер Штефан
МПК: F16H 61/42, F16H 39/02, B60K 6/00...
Метки: рабочего, транспортного, привода, средства, система
Формула / Реферат:
1. Самоходная уборочная машина, содержащаядвигатель (14) внутреннего сгорания,находящийся в приводном соединении с двигателем (14) внутреннего сгорания гидравлический насос (18), у которого вытеснение текучей среды является изменяемым посредством первого исполнительного элемента (62),связанный с гидравлическим насосом (18) с возможностью передачи гидравлической жидкости гидромотор (26, 28), у которого вытеснение текучей среды является изменяемым...
Способ восстановления рабочего органа землеройных машин

Номер патента: 10765
Опубликовано: 30.10.2008
Авторы: Ловков Константин Константинович, Анисимков Дмитрий Владимирович
МПК: E02F 9/28
Метки: машин, землеройных, способ, органа, рабочего, восстановления
Формула / Реферат:
1. Способ восстановления рабочего органа землеройных машин, включающий компенсацию изношенной режущей кромки зуба слоем металла, отличающийся тем, изношенную режущую кромку зуба дополняют предварительно сформированной в зависимости от разрабатываемой категории горных пород сменной режущей накладкой, присоединяя ее к нижней грани зуба с выступом режущей кромки накладки за пределы изношенной режущей кромки зуба, затем по мере износа накладку...
Система привода подающего транспортера уборочной машины
Номер патента: 18822
Опубликовано: 30.10.2013
Авторы: Россбах Конрад, Борер Штефан
МПК: F16H 61/42, A01F 29/16
Метки: транспортера, уборочной, привода, машины, система, подающего
Формула / Реферат:
1. Система привода подающего транспортера (22) уборочной машины (10), содержащаярегулируемый гидронасос (66), скорость и направление потока которого регулируются посредством первого исполнительного элемента (76), управляемого первым клапаном (90),гидромотор (68), соединенный с гидронасосом (66) с возможностью пропускания текучей рабочей среды и находящийся в приводной связи с подающим транспортером (22), исистему (70) управления, соединенную с...
Система и способ для использования глобального транслятора с целью синхронизации элементов рабочего пространства по всей сети
Номер патента: 2956
Опубликовано: 26.12.2002
Авторы: Вэгл Прасад, Мендез Дэниел Дж., Йинг Кристин К., Риггинс Марк Д.
МПК: G06F 17/00
Метки: пространства, целью, элементов, всей, глобального, рабочего, транслятора, синхронизации, сети, использования, система, способ
Формула / Реферат:
1. Система, включающая в себя первое запоминающее устройство для сохранения первого элемента рабочего пространства в первом формате, второе запоминающее устройство для сохранения второго элемента рабочего пространства, который является независимо модифицируемой копией первого элемента рабочего пространства, во втором формате, канал связи, связывающий первое запоминающее устройство со вторым запоминающим устройством, средство синхронизации для...