Способ подавления множественных отражений в сейсмических сигналах
Формула / Реферат
1. Способ разрешения множественных отражений от сейсмических сигналов морской сейсморазведки, включающий следующие операции:
когерентное фильтрование сейсмических сигналов;
фильтрование сейсмических сигналов через фильтр низких частот относительно выбранной частоты;
фильтрование сейсмических сигналов через фильтр высоких частот относительно указанной выбранной частоты, причем частоту выбирают таким образом, что выше этой частоты в сейсмических сигналах присутствуют, по существу, только множественные отражения;
генерацию маски со значением, равным единице, когда амплитуда сигнала, отфильтрованного через фильтр высоких частот, превышает выбранное пороговое значение, причем для всех прочих отфильтрованных через фильтр высоких частот сигналов маска имеет значение, равное нулю, при этом пороговое значение выбирают таким образом, что значения маски, равные единице, соответствуют образцам трасс, в которых присутствуют импульсы множественных отражений;
умножение значения маски на величины сигналов, отфильтрованных через фильтр низких частот;
прибавление умноженных сигналов к сигналам, отфильтрованным через фильтр высоких частот, для получения модели множественных отражений;
вычитание модели множественных отражений из когерентно отфильтрованных сейсмических сигналов и
по меньшей мере одну из операций: сохранение или вывод на монитор результатов вычитания.
2. Способ по п.1, отличающийся тем, что включает сортировку сейсмических сигналов на выборки по общему признаку трасс, которую осуществляют до операций когерентного фильтрования, фильтрования через фильтр низких частот и фильтрования через фильтр высоких частот.
3. Способ по п.1, отличающийся тем, что когерентное фильтрование включает FX-деконволюцию.
4. Способ по п.1, отличающийся тем, что включает когерентное фильтрование выходного сигнала вычитания.
5. Способ по п.4, отличающийся тем, что когерентное фильтрование выходного сигнала вычитания включает FX-деконволюцию.
6. Способ по п.1, отличающийся тем, что вычитание включает адаптивное вычитание.
7. Способ по п.1, отличающийся тем, что выбранная частота составляет порядка 40 Гц.
8. Способ по п.1, отличающийся тем, что суммарный амплитудный спектр области спада фильтра низких частот и области спада фильтра высоких частот, по существу, равен единице.
9. Способ по п.1, отличающийся тем, что фильтр низких частот и фильтр высоких частот представляют собой, по существу, нуль-фазовые фильтры.
10. Машиночитаемый носитель данных, на который записана компьютерная программа, содержащая логику, обеспечивающую выполнение программируемым компьютером следующих операций:
когерентное фильтрование сейсмических сигналов;
фильтрование сейсмических сигналов через фильтр низких частот относительно выбранной частоты;
фильтрование сейсмических сигналов через фильтр высоких частот относительно указанной выбранной частоты, причем частота выбрана таким образом, что выше этой частоты в сейсмических сигналах присутствуют, по существу, только множественные отражения;
генерацию маски со значением, равным единице, когда амплитуда сигнала, отфильтрованного через фильтр высоких частот, превышает выбранное пороговое значение, причем для всех прочих отфильтрованных через фильтр высоких частот сигналов маска имеет значение, равное нулю, при этом пороговое значение выбрано таким образом, что значения маски, равные единице, соответствуют образцам трасс, в которых присутствуют импульсы множественных отражений;
умножение значения маски на величины сигналов, отфильтрованных через фильтр низких частот;
прибавление умноженных сигналов к сигналам, отфильтрованным через фильтр высоких частот, для получения модели множественных отражений;
вычитание модели множественных отражений из когерентно отфильтрованных сейсмических сигналов и
по меньшей мере одну из операций: сохранение или вывод на монитор результатов вычитания.
11. Машиночитаемый носитель по п.10, отличающийся тем, что логика обеспечивает выполнение сортировки сейсмических сигналов на выборки по общему признаку трасс, до выполнения операций когерентного фильтрования, фильтрования через фильтр низких частот и фильтрования через фильтр высоких частот.
12. Машиночитаемый носитель по п.10, отличающийся тем, что когерентное фильтрование включает FX-деконволюцию.
13. Машиночитаемый носитель по п.10, отличающийся тем, что логика обеспечивает выполнение когерентного фильтрования выходного сигнала вычитания.
14. Машиночитаемый носитель по п.13, отличающийся тем, что когерентное фильтрование выходного сигнала вычитания включает FX-деконволюцию.
15. Машиночитаемый носитель по п.10, отличающийся тем, что вычитание включает адаптивное вычитание.
16. Машиночитаемый носитель по п.10, отличающийся тем, что выбранная частота составляет порядка 40 Гц.
17. Машиночитаемый носитель по п.10, отличающийся тем, что суммарный амплитудный спектр области спада фильтра низких частот и области спада фильтра высоких частот, по существу, равен единице.
18. Машиночитаемый носитель по п.10, отличающийся тем, что фильтр низких частот и фильтр высоких частот представляют собой, по существу, нуль-фазовые фильтры.
Текст
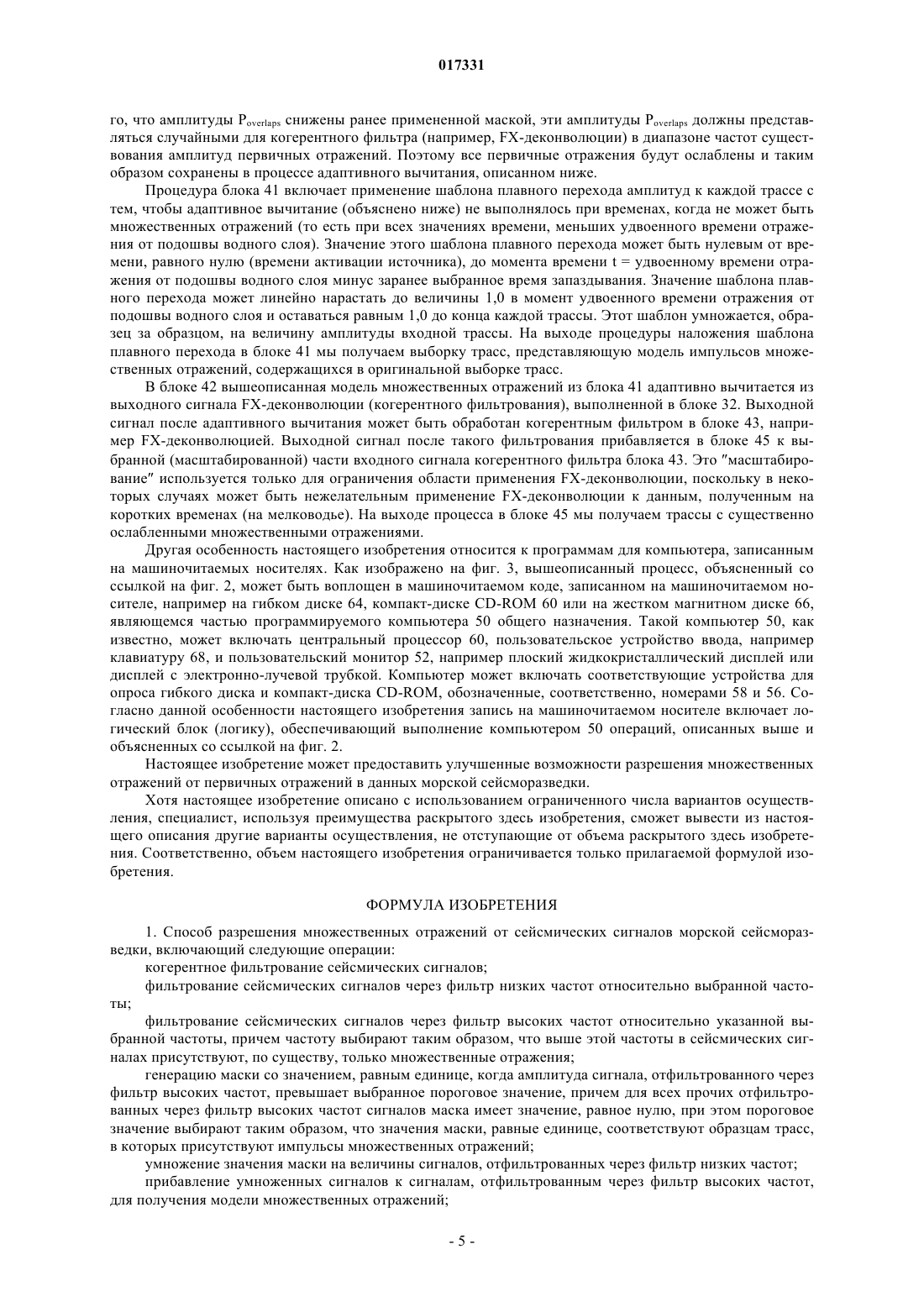
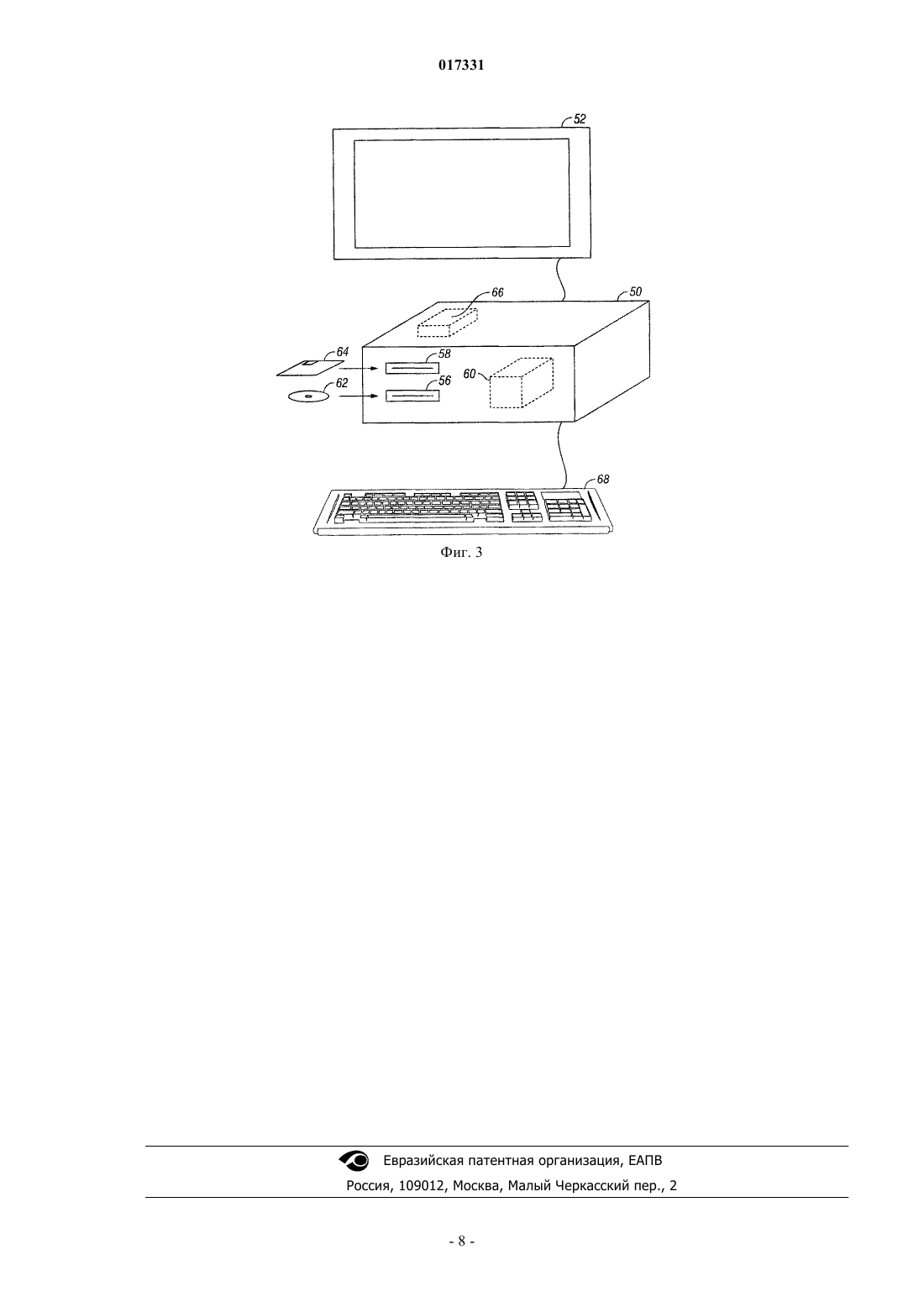
СПОСОБ ПОДАВЛЕНИЯ МНОЖЕСТВЕННЫХ ОТРАЖЕНИЙ В СЕЙСМИЧЕСКИХ СИГНАЛАХ Предложенный способ подавления множественных отражений в сейсмических сигналах включает когерентное фильтрование сейсмических сигналов. Сейсмические сигналы представляют собой сейсмические сигналы, отфильтрованные через фильтр низких частот, и сейсмические сигналы,отфильтрованные через фильтр высоких частот, относительно частоты, выбранной так, что в сейсмических сигналах выше этой частоты, по существу, присутствуют только множественные отражения. Генерируют маску со значением, равным единице, когда амплитуда сигнала,отфильтрованного через фильтр высоких частот, превышает выбранное пороговое значение. Для всех прочих отфильтрованных сигналов маска имеет значение, равное нулю. Значение маски умножают на величины сигналов, отфильтрованных через фильтр низких частот. Умноженные сигналы прибавляют к сигналам, отфильтрованным через фильтр высоких частот, и применяют когерентное фильтрование с целью удаления оставшихся первичных волн для получения модели множественных отражений. Эта модель множественных отражений вычитается из когерентно отфильтрованных сейсмических сигналов. Феррис Эдвард Джеймс (US) Хмара М.В. (RU)(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) 017331 Область техники, к которой относится изобретение Настоящее изобретение в целом относится к области сейсморазведки. Изобретение в особенности относится к способам обработки сейсмических данных с целью подавления влияния множественных отражений. Предшествующий уровень техники В области сейсморазведки сейсмические данные получают, направляя акустическую волну в землю из точки, расположенной вблизи поверхности земли, и принимая акустические волны, отраженные от границ различных слоев погребенных формаций. Акустическая волна отражается от границы, когда имеется различие акустического импеданса между прилегающими к границе слоями. Сигналы, соответствующие принятой энергии акустической волны, интерпретируются для вывода предположений о строении и составе структур геологической среды. При морской сейсморазведке для направления в землю акустической волны обычно используются такие сейсмические источники, как пневмопушки или группы пневмопушек. Пневмопушка или группа пневмопушек активируется на выбранной глубине в воде, как правило, в процессе буксировки судном. Это же или другое судно буксирует один или несколько находящихся в воде кабелей с сейсмодатчиками,называемых косами. Обычно коса, которая тянется за судном, сориентирована в направлении буксировки. Как правило, коса содержит ряд гидрофонов, расположенных на кабеле в известных точках на расстоянии друг от друга. Гидрофоны, как известно специалистам, это датчики, которые генерируют оптический или электрический сигнал, соответствующий давлению воды или временному градиенту давления воды. Судно, буксирующее одну или несколько кос, обычно везет записывающее оборудование для хронированной регистрации сигналов, выработанных гидрофонами в качестве отклика на принятую акустическую энергию. Запись сигналов обрабатывается, как было указано выше, для вывода предположений о строении и составе структур геологической среды, расположенной под местом проведения сейсморазведки. Морские сейсмоданные нередко содержат два частных вида ложных сигналов, которые требуют применения специальных методов обработки для вывода более точных предположений о строении и составе погребенных формаций геологической среды. Эти два вида ложных сигналов, известные как волны-спутники и множественные отражения в слое воды, возникают из-за того, что акустический импеданс воды существенно отличается от акустического импеданса воздуха над водной поверхностью и, как правило, существенно отличается от акустического импеданса формаций подошвы водного слоя (или дна моря). Волны-спутники и множественные отражения в слое воды можно объяснить следующим образом. Когда пневмопушка или группа пневмопушек активируется, акустическая волна распространяется, в общем, вниз, проходит дно моря и уходит в формации геологической среды. При этом акустическая волна частично отражается на границах слоев геологической среды, имеющих разный акустический импеданс,как было объяснено выше. Отраженная акустическая волна распространяется, в общем, вверх и в конце концов регистрируется сейсмодатчиками (гидрофонами) одной или нескольких кос. Однако после того как отраженная волна достигла кос, она продолжает распространяться вверх до тех пор, пока не достигнет поверхности воды. Граница воды является границей почти полного отражения (коэффициент отражения равен единице) по отношению к распространяющейся вверх акустической волне. Поэтому почти вся распространяющаяся вверх акустическая волна отражается от поверхности воды и вновь распространяется вниз. Эта акустическая волна, отраженная от поверхности воды, будет, кроме того, сдвинута по фазе на величину примерно 180 относительно распространяющейся вверх, то есть падающей, акустической волны. Эту отраженную от поверхности воды распространяющуюся вниз акустическую волну обычно и называют волной-спутником. Волна-спутник вызывает отчетливый провал, или подавление сигнала в ограниченном наборе частот зарегистрированных гидрофонами акустических волн. Частота провала зарегистрированных акустических волн связана, как хорошо известно специалистам, с выбранной глубиной расположения косы. Распространяющаяся вниз акустическая волна, отраженная от поверхности воды, как и акустическая волна, излученная непосредственно из сейсмического источника, может отражаться от дна и распространяться вверх, где будет зарегистрирована гидрофонами. Эта же самая распространяющаяся вверх акустическая волна отразится также и от поверхности воды, после чего вновь пойдет вниз. Акустическая волна может таким образом многократно отражаться от поверхности воды и от дна, пока не затухнет, что приводит к возникновению так называемых реверберации в слое воды. Эти реверберации могут иметь значительные амплитуды в общем сигнале зарегистрированной акустической волны, маскируя акустические волны, отраженные от границ слоев погребенных формаций и затрудняя этим вывод из сейсмоданных предположений о строении и составе структур геологической среды. Существует ряд методов очистки и подавления эффекта влияния слоя воды. Один из таких методов описан в патенте США 4486865, выданном Руле (Ruehle). Используются пары датчиков, в каждой паре - геофон и гидрофон. К выходу по меньшей мере одного датчика из каждой пары - геофона или гидрофона - подсоединяется фильтр для регулирования частотного состава отфильтрованного сигнала. Ре-1 017331 гулирование частотного состава осуществляется таким образом, что при сложении отфильтрованного сигнала с сигналом второго датчика волна-спутник гасится. В патенте США 5621700, выданном Молдовеню (Moldovenu), также описывается использование по меньшей мере одной пары датчиков в способе подавления волн-спутников и реверберации в слое воды. В патенте США 4935903, выданном Сандерсу (Sanders) и сотрудникам, описывается способ уменьшения влияния реверберации в слое воды, включающий измерение давления на вертикально разнесенных уровнях глубины или измерение давления и движения частиц с использованием пар датчиков. Этот способ включает улучшение данных по первичным отражениям - для использования в процессе обработки до суммирования - посредством добавления данных по волнам-спутникам. В патенте США 4979150 описывается способ морской сейсморазведки, в котором выходные сигналы скоординированно расположенных гидрофонов и геофонов подвергаются масштабированию. Эти скоординированно расположенные гидрофоны и геофоны могут располагаться на дне моря или над дном моря. Разведку многих участков геологической среды, расположенных под слоем воды, непрактично проводить с использованием донных кабелей; кроме того, в практически применяемых при морской сейсморазведке способах сбора данных в настоящее время используются гидрофоны. Далее, имеются большие объемы таких, собранных с использованием гидрофонов, данных морской сейсморазведки, из которых можно извлечь полезную информацию, применяя усовершенствованные способы разрешения множественных отражений. В связи с этим сохраняется потребность в способах подавления влияний множественных отражений в слое воды на сейсмические сигналы. Сущность изобретения Способ подавления множественных отражений в сейсмических сигналах согласно одному из аспектов изобретения включает когерентное фильтрование сейсмических сигналов. Сейсмические сигналы представляют собой сейсмические сигналы, отфильтрованные через фильтр низких частот, и сейсмические сигналы, отфильтрованные через фильтр высоких частот, относительно частоты, выбранной так, что выше этой частоты в сейсмических сигналах, по существу, присутствуют только множественные отражения. Генерируют маску со значением, равным единице, когда амплитуда сигнала, отфильтрованного через фильтр высоких частот, превышает выбранное пороговое значение. Для всех прочих отфильтрованных сигналов маска имеет значение, равное нулю. Значение маски умножают на величины сигналов,отфильтрованных через фильтр низких частот. Умноженные сигналы прибавляют к сигналам, отфильтрованным через фильтр высоких частот, для получения модели множественных отражений. Эту модель множественных отражений вычитают из когерентно отфильтрованных сейсмических сигналов. Другим аспектом настоящего изобретения является машиночитаемый носитель данных с записанной компьютерной программой. Эта программа содержит логику, обеспечивающую выполнение программируемым компьютером операций, включающих фильтрование сейсмических сигналов через фильтр низких частот и через фильтр высоких частот относительно некоторой частоты. Частота выбирается так, что выше этой частоты в сейсмических сигналах, по существу, присутствуют только множественные отражения. Генерируется маска со значением, равным единице, когда амплитуда сигнала, отфильтрованного через фильтр высоких частот, превышает выбранное пороговое значение. Для всех прочих отфильтрованных сигналов маска имеет значение, равное нулю. Значение маски умножается на величины сигналов, отфильтрованных через фильтр низких частот. Умноженные сигналы прибавляются к сигналам, отфильтрованным через фильтр высоких частот, для получения модели множественных отражений. Эта модель множественных отражений вычитается из когерентно отфильтрованных сейсмических сигналов. Прочие особенности и преимущества настоящего изобретения будут ясны из нижеследующего описания и прилагаемой формулы изобретения. Краткий перечень фигур чертежей На фиг. 1 показан пример, иллюстрирующий сбор данных морской сейсморазведки при наличии реверберации в слое воды. На фиг. 2 - блок-схема, дающая пример осуществления процесса согласно изобретению. На фиг. 3 - программируемый компьютер общего назначения и машиночитаемые носители данных. Сведения, подтверждающие возможность осуществления изобретения Пример процесса сбора данных морской сейсморазведки, в котором может быть использовано настоящее изобретение, схематически показан на фиг. 1. Судно 10 сейсморазведки движется по поверхности 18 А слоя воды 18, такого как озеро или океан. Судно 10 сейсморазведки везет оборудование (обозначенное позицией 12 и в целом называемое записывающей системой), включающее устройства (не показанные отдельно) для активации в выбранные моменты времени источника 14 сейсмических волн, устройства для определения в каждый момент времени геодезического положения судна 10, источника 14 и каждого из набора сейсмодатчиков 16, а также устройства для регистрации сигналов, выработанных сейсмодатчиками 16. Различные устройства, которые могут быть включены в состав записывающей системы 12, хорошо известны специалистам и не требуют отдельных описаний.-2 017331 Сейсмодатчики 16 обычно представляют собой гидрофоны или иные датчики, чувствительные к давлению или к градиенту давлений. В других примерах применений могут быть использованы другие типы сейсмодатчиков, например, датчики, чувствительные к движению частиц. Сейсмодатчики 16 располагаются в пространственно разнесенных точках вдоль кабелей, называемых косами. В примере фиг. 1 для ясности изображения показана только одна коса, однако количество кос, количество датчиков в косах, а также буксировка одной или нескольких кос судном 10 сейсморазведки или другим судном - не ограничивают объема настоящего изобретения. Источник 14 сейсмических волн и сейсмодатчики 16 буксируются на выбранной глубине под поверхностью 18 А воды 18. В процессе сбора сейсмоданных источник 14, который может представлять собой, например, пневмопушку или группу пневмопушек, активируется в выбранные моменты времени,и сигналы, выработанные сейсмодатчиками 16 в качестве отклика на сейсмическую энергию, принятую от источника 14, записываются соответствующими устройствами записывающей системы 12. Эти записи сигналов, как правило, хронируются с отсчетом от времени (времен) активации источника 14 сейсмических волн. Могут выполняться отдельные записи для каждого из сейсмодатчиков 16 или же выбранные группы сейсмодатчиков 16 могут быть связаны по сигналу, так что выполняется соответствующая запись сигнала, выработанного всеми датчиками такой группы. Как правило, выполняется несколько тысяч индивидуальных записей (называемых каналами), соответствующих сигналам, зарегистрированным каждой из набора пространственно разнесенных групп сейсмодатчиков. Вообще говоря, сейсмическая волна после активации источника 14 распространяется в окружающее пространство и идет вниз - обозначение 22 на фиг. 1 - сквозь воду 18, пока не достигнет подошвы 18 В водного слоя. Далее сейсмическая волна продолжает распространяться вниз сквозь геологическую среду,пока не достигнет одной или нескольких границ 20 акустического импеданса в геологической среде. От таких границ волна может отразиться и затем распространяться вверх - обозначение 24, - где, по достижении сейсмодатчиков 16, она регистрируется. Но сейсмическая волна продолжает распространяться вверх, пока не достигнет поверхности 18 А воды. Здесь сейсмическая волна отражается от поверхности воды 18 А и вновь распространяется вниз - обозначение 26, при этом она может быть зарегистрирована сейсмодатчиками 16 (и продолжать распространяться вниз). Распространяющаяся вниз сейсмическая волна, будь она отраженной от поверхности 18 А воды или распространяющейся непосредственно от источника 14, может также отражаться от подошвы 18 В водного слоя. Отражения между поверхностью 18 А воды и подошвой 18 В водного слоя могут продолжаться в ряде циклов, создавая ложные отражения сейсмических сигналов, регистрируемые датчиками 16 и называемые реверберацией в слое воды, или множественными отражениями в слое воды. Способ согласно настоящему изобретению предназначен для снижения влияния таких множественных отражений в слое воды на сейсмические сигналы. Способ согласно настоящему изобретению основан на использовании ширины полосы первичных отражений, то есть на том, что частоты сейсмических волн, однократно отраженных от границ геологической среды, например, таких, которые обозначены позицией 24 на фиг. 1, ограничены областью низких частот (например, ниже примерно 40 Гц), в то время как полоса частот множественных отражений шире. Обратимся к фиг. 2. В блоке 31 осуществляется первая операция способа согласно настоящему изобретению, а именно сортировка оригинальных записей сейсмических сигналов на выборки по некоторому общему признаку трасс. Трасса в приложении к обработке сейсмических сигналов означает запись амплитуды - обычно в функции от времени записи - сейсмического сигнала, зарегистрированного отдельным сейсмоприемником (или набором таких приемников) из группы таких приемников. Упомянутый признак должен быть выбран так, чтобы можно было применить к выбранным трассам когерентное фильтрование для усиления сейсмических сигналов, представляющих интерес, и ослабить влияние случайных помех. Одним из примеров выборки по общему признаку является выборка записей приемников с общим удалением приемника от источника. Другие примеры, среди прочих: выборки по общей средней точке и выборки по общему пункту взрыва. Как было объяснено выше, записи сигналов обычно включают одну запись сигнала для каждого сейсмодатчика из набора отдельных сейсмодатчиков или групп таких датчиков, сделанную в момент активации источника. Выборки по общему удалению - это выбранные из записей сейсмических сигналов совокупности, в которых в момент записи сейсмических сигналов каждая выбранная отдельная запись соответствует одному и тому же расстоянию вдоль водной поверхности (18 А на фиг. 1) между положением источника и положением соответствующего сейсмодатчика. В таких выборках по общему удалению первичные отражения и множественные отражения дают когерентные проявления; то есть проявления с высокой амплитудой в сигналах указывают на определенный род связи между временем этих высокоамплитудных проявлений и геометрией сбора данных (удалением). В блоке 32 на выборках по общему удалению выполняется операция, называемая когерентным фильтрованием (одним из примеров которой может быть FX-деконволюция), имеющая целью подавление случайных помех, то есть подавление в сигналах проявлений, которые представляются никак не связанными с геометрией сбора данных. При FX-деконволюции пространственные окна (например, по 10 сигналов отдельных датчиков, или трасс) и временные окна (например, по 20 мс) входных сигналов-3 017331 трансформируются преобразованием Фурье в частотно-пространственную (F-X) область. Операторы деконволюции строятся в пространственном (X) измерении для предсказания когерентных частей сигнала. После вычитания когерентных частей остаются некогерентные части (случайные помехи), которые можно подвергнуть обратному преобразованию и вычесть из оригинального сигнала. Затем аналогичным образом обрабатываются последующие окна. Предпочтительно, чтобы между окнами имелось некоторое временное и/или пространственное перекрытие. Результат этого когерентного фильтрования будет использован на более поздних стадиях процесса, как объясняется ниже. В блоке 33 к записям сейсмосигналов применяется фильтр низких частот. Частота среза фильтра низких частот выбирается равной наивысшей ожидаемой частоте в частотном составе первичных отражений. Выходные сигналы после фильтра низких частот содержат первичные отражения (например, 24 на фиг. 1) во всей их полноте и низкочастотную часть множественных отражений (например, 26 на фиг. 1). Сигналы, прошедшие фильтр низких частот, можно обозначить Mlow, (Мнизк). Фильтр низких частот можно определить как фильтр, имеющий полосу 0-30 Гц; спад начинается при 30 Гц, а частоты 40 Гц и более высокие в значительной мере подавляются. Аналогичные фильтровальные характеристики могут быть выбраны и для других частот среза фильтра низких частот, в зависимости от частотного состава конкретных сейсмоданных. В блоке 34 к записям сейсмосигналов применяется фильтр высоких частот (блока 32). После фильтрования высоких частот в записях сейсмических сигналов выходные сигналы по существу не содержат первичных отражений, но будут содержать высокочастотную часть множественных отражений. Сигналы, прошедшие фильтр высоких частот, можно обозначить Mhigh (Мвысок). Фильтр высоких частот можно определить как фильтр, в значительной мере подавляющий частоты от 0 до 30 Гц; спад начинается при 40 Гц, а частоты от 40 Гц и выше проходят свободно. Переходные области (области спада) фильтра низких частот и фильтра высоких частот, примененных в блоках 33 и 34, соответственно, должны быть выбраны так, чтобы при суммировании выходных амплитудных спектров результирующий амплитудный спектр равнялся единице для всех частот. Кроме того, оба эти фильтра должны быть нуль-фазовыми фильтрами, чтобы не изменялась фаза их соответственных входных сигналов. В блоке 37 сравниваются величины (абсолютные значения) образцов трасс, прошедших фильтрование высоких частот, с некоторым пороговым значением, обозначаемым как порог 1. Если величина образца трассы превышает порог 1, соответствующий образец выхода трассы приравнивается единице. Если величина образца трассы меньше порога 1 или равна ему, соответствующий образец выхода трассы приравнивается нулю. Описанная процедура создает некоторую карту (или маску), в которой значения образцов равны либо единице, что указывает на образец с множественными сейсмическими импульсами,либо нулю, что указывает на образец с сейсмическими импульсами первичных отражений или на образец, в котором отсутствуют импульсы множественных отражений. Поскольку значения образцов, содержащихся в выборках трасс по общему признаку, могут сильно различаться в разных сейсморазведках,численное значение порога 1 может быть рассчитано, например, как среднее абсолютное значение по всем образцам трасс в каждой выборке трасс. На практике значение порога 1 может быть выбрано посредством интерпретирующей процедуры. К примеру, средние амплитуды значений [средние абсолютные значения] данных во временном окне, содержащем отражения, непосредственно предшествующие моменту, в который могли вступить какие-либо множественные отражения, то есть в моменты, непосредственно предшествующие двум временам: времени прихода отражения от дна океана, принимаемого в качестве исходного значения, и времени, полученного в результате вышеописанной процедуры, - могут быть исследованы на базе одной выборки по общему удалению. Описанная процедура может быть повторена с использованием уменьшенных и увеличенных с некоторым шагом значений порога 1. Визуально исследовав результаты, можно выбрать такое значение порога 1, которое представляется оптимальным для обработки всей совокупности данных. Если порог 1 установлен слишком высоко, в амплитудной карте будут одни нули, и все низкочастотные данные окажутся исключены из модели. Если порог 1 установлен слишком низко, в амплитудной карте будут одни единицы, и все низкочастотные данные будут содержаться в модельных данных, то есть адаптивно вычитаться (объяснено ниже) из оригинальных данных, тем самым в выходном сигнале будут ослаблены или из него будут исключены первичные отражения. В блоке 38 эта карта, образец за образцом, умножается на величины выходных сигналов фильтра низких частот из блока 33. В результате должны быть, по существу, устранены образцы, представляющие сейсмические импульсы первичных отражений, и оставлена только низкочастотная часть множественных отражений Mlow. Заметим, что если множественное отражение совпадает с первичным отражением, то результирующий сейсмический импульс будет равен сумме этих двух импульсов. Таким образом,выходной сигнал блока 38 можно обозначить как Mlow + Poverlaps(Мнизк + Рперекрытий). В блоке 39 выходной сигнал после умножения в блоке 38 суммируется с выходным сигналом фильтра высоких частот блока 32, что дает в результате полную полосу частот сигнала множественных отражений Mlow + Mhigh (плюс возможные Poverlaps). Амплитуды импульсов Poverlaps можно существенно уменьшить, как показано в блоке 40, посредством когерентного фильтрования. Одним из вариантов когерентного фильтрования, который может быть использован, является FX-деконволюция. Исходя из то-4 017331 го, что амплитуды Poverlaps снижены ранее примененной маской, эти амплитуды Poverlaps должны представляться случайными для когерентного фильтра (например, FX-деконволюции) в диапазоне частот существования амплитуд первичных отражений. Поэтому все первичные отражения будут ослаблены и таким образом сохранены в процессе адаптивного вычитания, описанном ниже. Процедура блока 41 включает применение шаблона плавного перехода амплитуд к каждой трассе с тем, чтобы адаптивное вычитание (объяснено ниже) не выполнялось при временах, когда не может быть множественных отражений (то есть при всех значениях времени, меньших удвоенного времени отражения от подошвы водного слоя). Значение этого шаблона плавного перехода может быть нулевым от времени, равного нулю (времени активации источника), до момента времени t = удвоенному времени отражения от подошвы водного слоя минус заранее выбранное время запаздывания. Значение шаблона плавного перехода может линейно нарастать до величины 1,0 в момент удвоенного времени отражения от подошвы водного слоя и оставаться равным 1,0 до конца каждой трассы. Этот шаблон умножается, образец за образцом, на величину амплитуды входной трассы. На выходе процедуры наложения шаблона плавного перехода в блоке 41 мы получаем выборку трасс, представляющую модель импульсов множественных отражений, содержащихся в оригинальной выборке трасс. В блоке 42 вышеописанная модель множественных отражений из блока 41 адаптивно вычитается из выходного сигнала FX-деконволюции (когерентного фильтрования), выполненной в блоке 32. Выходной сигнал после адаптивного вычитания может быть обработан когерентным фильтром в блоке 43, например FX-деконволюцией. Выходной сигнал после такого фильтрования прибавляется в блоке 45 к выбранной (масштабированной) части входного сигнала когерентного фильтра блока 43. Это масштабирование используется только для ограничения области применения FX-деконволюции, поскольку в некоторых случаях может быть нежелательным применение FX-деконволюции к данным, полученным на коротких временах (на мелководье). На выходе процесса в блоке 45 мы получаем трассы с существенно ослабленными множественными отражениями. Другая особенность настоящего изобретения относится к программам для компьютера, записанным на машиночитаемых носителях. Как изображено на фиг. 3, вышеописанный процесс, объясненный со ссылкой на фиг. 2, может быть воплощен в машиночитаемом коде, записанном на машиночитаемом носителе, например на гибком диске 64, компакт-диске CD-ROM 60 или на жестком магнитном диске 66,являющемся частью программируемого компьютера 50 общего назначения. Такой компьютер 50, как известно, может включать центральный процессор 60, пользовательское устройство ввода, например клавиатуру 68, и пользовательский монитор 52, например плоский жидкокристаллический дисплей или дисплей с электронно-лучевой трубкой. Компьютер может включать соответствующие устройства для опроса гибкого диска и компакт-диска CD-ROM, обозначенные, соответственно, номерами 58 и 56. Согласно данной особенности настоящего изобретения запись на машиночитаемом носителе включает логический блок (логику), обеспечивающий выполнение компьютером 50 операций, описанных выше и объясненных со ссылкой на фиг. 2. Настоящее изобретение может предоставить улучшенные возможности разрешения множественных отражений от первичных отражений в данных морской сейсморазведки. Хотя настоящее изобретение описано с использованием ограниченного числа вариантов осуществления, специалист, используя преимущества раскрытого здесь изобретения, сможет вывести из настоящего описания другие варианты осуществления, не отступающие от объема раскрытого здесь изобретения. Соответственно, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ разрешения множественных отражений от сейсмических сигналов морской сейсморазведки, включающий следующие операции: когерентное фильтрование сейсмических сигналов; фильтрование сейсмических сигналов через фильтр низких частот относительно выбранной частоты; фильтрование сейсмических сигналов через фильтр высоких частот относительно указанной выбранной частоты, причем частоту выбирают таким образом, что выше этой частоты в сейсмических сигналах присутствуют, по существу, только множественные отражения; генерацию маски со значением, равным единице, когда амплитуда сигнала, отфильтрованного через фильтр высоких частот, превышает выбранное пороговое значение, причем для всех прочих отфильтрованных через фильтр высоких частот сигналов маска имеет значение, равное нулю, при этом пороговое значение выбирают таким образом, что значения маски, равные единице, соответствуют образцам трасс,в которых присутствуют импульсы множественных отражений; умножение значения маски на величины сигналов, отфильтрованных через фильтр низких частот; прибавление умноженных сигналов к сигналам, отфильтрованным через фильтр высоких частот,для получения модели множественных отражений;-5 017331 вычитание модели множественных отражений из когерентно отфильтрованных сейсмических сигналов и по меньшей мере одну из операций: сохранение или вывод на монитор результатов вычитания. 2. Способ по п.1, отличающийся тем, что включает сортировку сейсмических сигналов на выборки по общему признаку трасс, которую осуществляют до операций когерентного фильтрования, фильтрования через фильтр низких частот и фильтрования через фильтр высоких частот. 3. Способ по п.1, отличающийся тем, что когерентное фильтрование включает FX-деконволюцию. 4. Способ по п.1, отличающийся тем, что включает когерентное фильтрование выходного сигнала вычитания. 5. Способ по п.4, отличающийся тем, что когерентное фильтрование выходного сигнала вычитания включает FX-деконволюцию. 6. Способ по п.1, отличающийся тем, что вычитание включает адаптивное вычитание. 7. Способ по п.1, отличающийся тем, что выбранная частота составляет порядка 40 Гц. 8. Способ по п.1, отличающийся тем, что суммарный амплитудный спектр области спада фильтра низких частот и области спада фильтра высоких частот, по существу, равен единице. 9. Способ по п.1, отличающийся тем, что фильтр низких частот и фильтр высоких частот представляют собой, по существу, нуль-фазовые фильтры. 10. Машиночитаемый носитель данных, на который записана компьютерная программа, содержащая логику, обеспечивающую выполнение программируемым компьютером следующих операций: когерентное фильтрование сейсмических сигналов; фильтрование сейсмических сигналов через фильтр низких частот относительно выбранной частоты; фильтрование сейсмических сигналов через фильтр высоких частот относительно указанной выбранной частоты, причем частота выбрана таким образом, что выше этой частоты в сейсмических сигналах присутствуют, по существу, только множественные отражения; генерацию маски со значением, равным единице, когда амплитуда сигнала, отфильтрованного через фильтр высоких частот, превышает выбранное пороговое значение, причем для всех прочих отфильтрованных через фильтр высоких частот сигналов маска имеет значение, равное нулю, при этом пороговое значение выбрано таким образом, что значения маски, равные единице, соответствуют образцам трасс, в которых присутствуют импульсы множественных отражений; умножение значения маски на величины сигналов, отфильтрованных через фильтр низких частот; прибавление умноженных сигналов к сигналам, отфильтрованным через фильтр высоких частот,для получения модели множественных отражений; вычитание модели множественных отражений из когерентно отфильтрованных сейсмических сигналов и по меньшей мере одну из операций: сохранение или вывод на монитор результатов вычитания. 11. Машиночитаемый носитель по п.10, отличающийся тем, что логика обеспечивает выполнение сортировки сейсмических сигналов на выборки по общему признаку трасс, до выполнения операций когерентного фильтрования, фильтрования через фильтр низких частот и фильтрования через фильтр высоких частот. 12. Машиночитаемый носитель по п.10, отличающийся тем, что когерентное фильтрование включает FX-деконволюцию. 13. Машиночитаемый носитель по п.10, отличающийся тем, что логика обеспечивает выполнение когерентного фильтрования выходного сигнала вычитания. 14. Машиночитаемый носитель по п.13, отличающийся тем, что когерентное фильтрование выходного сигнала вычитания включает FX-деконволюцию. 15. Машиночитаемый носитель по п.10, отличающийся тем, что вычитание включает адаптивное вычитание. 16. Машиночитаемый носитель по п.10, отличающийся тем, что выбранная частота составляет порядка 40 Гц. 17. Машиночитаемый носитель по п.10, отличающийся тем, что суммарный амплитудный спектр области спада фильтра низких частот и области спада фильтра высоких частот, по существу, равен единице. 18. Машиночитаемый носитель по п.10, отличающийся тем, что фильтр низких частот и фильтр высоких частот представляют собой, по существу, нуль-фазовые фильтры.
МПК / Метки
Метки: отражений, сигналах, способ, сейсмических, подавления, множественных
Код ссылки
<a href="https://eas.patents.su/9-17331-sposob-podavleniya-mnozhestvennyh-otrazhenijj-v-sejjsmicheskih-signalah.html" rel="bookmark" title="База патентов Евразийского Союза">Способ подавления множественных отражений в сейсмических сигналах</a>
Способ подавления многократных отражений, основанный на фазовых решетках
Номер патента: 4776
Опубликовано: 26.08.2004
Авторы: Ли Пол Дж., Янг Джон В., Росс Уоррен С., Энджвайн Дуг, Хейни Стив Э., Зханг Майкл М.
Метки: основанный, отражений, подавления, фазовых, многократных, решетках, способ
Формула / Реферат:
1. Устройство для подавления многократных отражений при сборе сейсмических данных в водном пространстве с границей раздела воздух-вода, содержащее по меньшей мере один источник сейсмических сигналов, расположенный в водном пространстве; по меньшей мере один приемник сейсмических сигналов, расположенный в водном пространстве ниже границы раздела воздух-вода; распределитель пузырьков, расположенный в водном пространстве так, что выпускаемые им...
Способ выделения сейсмических сигналов, а также определения и коррекции геометрических и статических ошибок в сейсмических данных
Номер патента: 1766
Опубликовано: 27.08.2001
Автор: Мартин Федерико
МПК: G01V 1/36
Метки: статических, коррекции, также, ошибок, сигналов, данных, определения, сейсмических, выделения, способ, геометрических
Формула / Реферат:
1. Способ автоматического выделения сейсмических сигналов с практически линейными осями синфазности в данных, полученных с применением многоэлементных систем наблюдений, причем для сборок трасс с общим элементом, по меньшей мере, один элемент данных включает источник и, по меньшей мере, еще один элемент данных включает приемник, включающий следующие операции: вычисление комплексной огибающей трасс сборки; сортировку сборок по первой элементной...
Способы модулирования киназных белков множественных линий и скрининга соединений, которые модулируют киназные белки множественных линий
Номер патента: 6648
Опубликовано: 24.02.2006
Авторы: Найт Эрнест Мл., Уолтон Кевин М., Гликсман Марси А., Дайонн Крэйг А., Нефф Никола, Мэрони Анна
МПК: A61K 31/535, A61K 31/55, A61K 31/40...
Метки: скрининга, которые, белков, модулирования, множественных, киназные, линий, соединений, киназных, модулируют, белки, способы
Формула / Реферат:
1. Способ идентификации соединения, которое модулирует активность киназного белка множественных линий и повышает выживаемость клеток, включающий в себя следующие этапы: (a) контактирование указанной клетки, содержащей указанный киназный белок множественных линий, с указанным соединением; (b) определение того, снижает ли указанное соединение активность указанного киназного белка множественных линий; и (c) определение того, повышает ли указанное...
Способ и устройство для коррекции истинных относительных амплитуд сейсмических данных за эффекты растяжения сейсмических сигналов после исключения нормального приращения времени
Номер патента: 13009
Опубликовано: 26.02.2010
Авторы: Херкенхофф Э.Фредерик, Олфорд Ричард Б., Мартин Гарри Л.
МПК: G01V 1/28
Метки: эффекты, устройство, коррекции, истинных, после, исключения, амплитуд, времени, способ, растяжения, относительных, нормального, сигналов, приращения, данных, сейсмических
Формула / Реферат:
1. Способ нахождения стянутых сейсмических трасс с истинными относительными амплитудами на основании растянутых сейсмических трасс, содержащий этапы, при выполнении которых:a) регистрируют растянутые сейсмические трассы;b) определяют коэффициенты bрастяжения для растянутых сейсмических трасс;c) определяют входные спектры для растянутых сейсмических трасс;d) находят оценки спектров растянутых сейсмических импульсов на основании входных...
Способ осуществления электромагнитной разведки с управляемым источником с использованием множественных передатчиков

Номер патента: 12769
Опубликовано: 30.12.2009
Авторы: Виллен Деннис Е., Саммерфилд Филип Дж.
Метки: передатчиков, электромагнитной, использованием, способ, источником, управляемым, множественных, осуществления, разведки
Формула / Реферат:
1. Способ осуществления электромагнитной разведки в подземной области с использованием двух или более электромагнитных передатчиков и разделением комбинированных откликов на приемнике для каждого передатчика, содержащий этапы, на которых: (a) выбирают или конструируют N взаимно ортогональных форм сигнала, по одной на каждый из N передатчиков, где N=2 или более, (b) возбуждают каждый передатчик для периодической передачи его формы сигнала, причем...
Предыдущий патент: Устройство и способ контроля над суспензиями для обратной закачки отходов
Следующий патент: Способ депарафинизации и обезмасливания нефтяных фракций и устройство для его осуществления
Случайный патент: Крышка с защитой от несанкционированного вскрытия