Сейсмический источник энергии и способ управления работой этого источника
Номер патента: 21673
Опубликовано: 31.08.2015
Авторы: Стейнсланд Торе, Элвестад Карл Петтер, Ховланд Видар
Формула / Реферат
1. Модуль сейсмического источника энергии, содержащий
сейсмический источник энергии;
плавучее устройство, соединенное с сейсмическим источником энергии и выполненное с возможностью буксирования буксирующим судном,
при этом указанный модуль выполнен с возможностью уменьшения плавучести плавучего устройства путем впуска воды во внутреннюю камеру плавучего устройства, а также с возможностью увеличения плавучести плавучего устройства путем удаления воды из внутренней камеры плавучего устройства.
2. Модуль по п.1, отличающийся тем, что плавучее устройство содержит несколько внутренних камер, при этом модуль выполнен с возможностью впуска воды в одну или более из числа нескольких внутренних камер для уменьшения плавучести плавучего устройства.
3. Модуль по п.1, отличающийся тем, что он содержит одно или более дополнительных плавучих устройств, причем каждое из числа одного или более дополнительных плавучих устройств содержит внутреннюю камеру, при этом модуль выполнен с возможностью впуска воды в одну или более из числа внутренних камер одного или более дополнительных плавучих устройств для уменьшения плавучести одного или более дополнительных плавучих устройств.
4. Модуль по п.1, отличающийся тем, что дополнительно содержит буй-ориентир, соединенный с плавучим устройством, при этом модуль выполнен с возможностью определения весовой нагрузки на заданную часть плавучего устройства на основании силы, обеспечиваемой буем-ориентиром.
5. Модуль по п.4, отличающийся тем, что он дополнительно выполнен с возможностью выравнивания плавучего устройства на основании определенной таким образом весовой нагрузки.
6. Модуль по п.1, отличающийся тем, что он дополнительно содержит управляющую плоскость, при этом модуль выполнен с возможностью перемещения управляющей плоскости с целью управления плавучим устройством.
7. Модуль по п.1, отличающийся тем, что он выполнен с возможностью функционирования в режиме по умолчанию, в котором модуль обеспечивает подъем плавучего устройства к водной поверхности.
8. Модуль по п.1, отличающийся тем, что он выполнен с возможностью уменьшения плавучести плавучего устройства в ответ на возникновение навигационной опасности вблизи водной поверхности.
9. Способ управления модулем сейсмического источника энергии, охарактеризованным в п.1, включающий следующие шаги:
посредством буксирующего судна буксируют в воде плавучее устройство, причем плавучее устройство соединено по меньшей мере с одним сейсмическим источником энергии;
уменьшают посредством модуля по п.1 плавучесть плавучего устройства, чтобы вызвать его погружение в случае возникновения навигационной опасности.

Текст
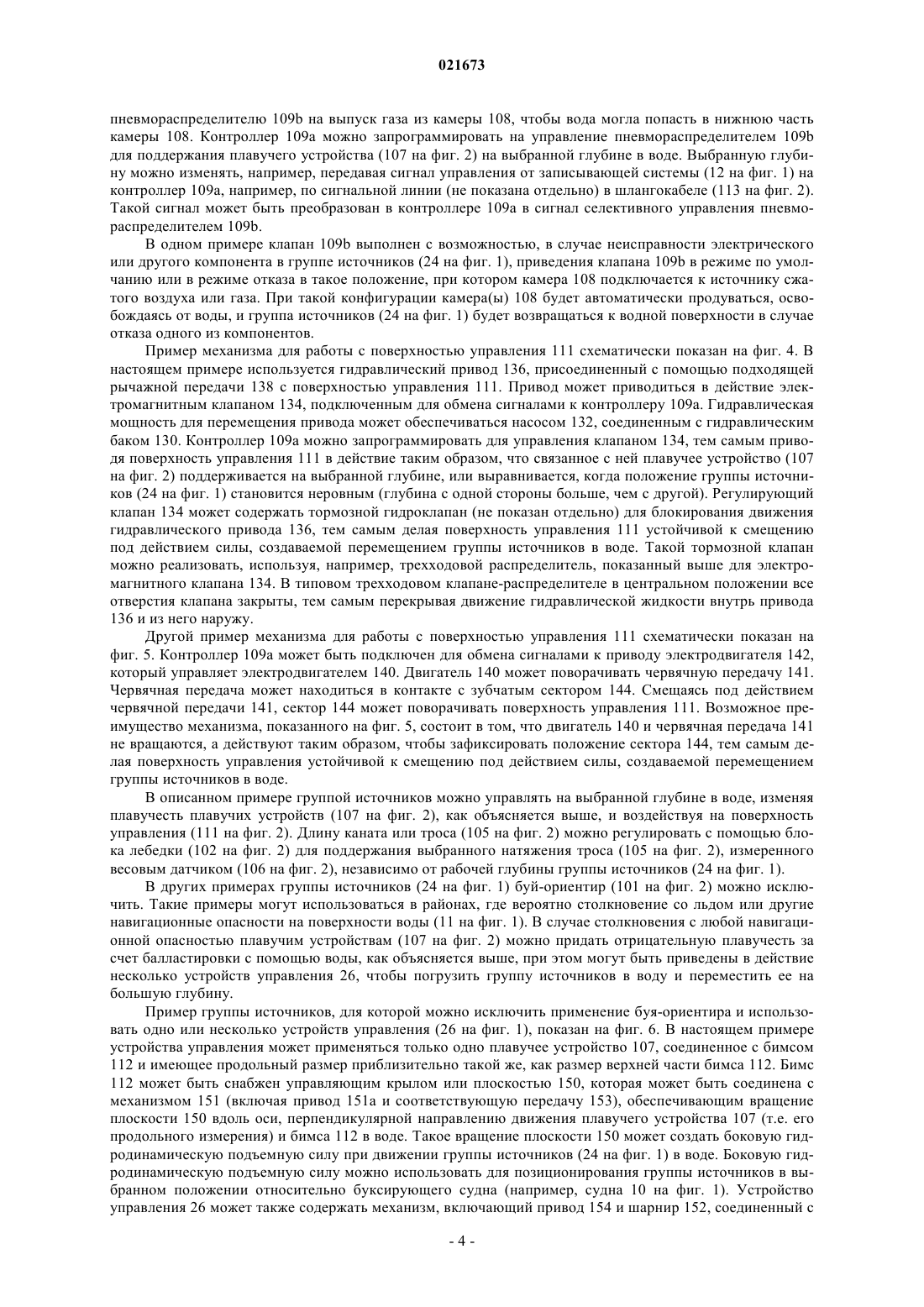
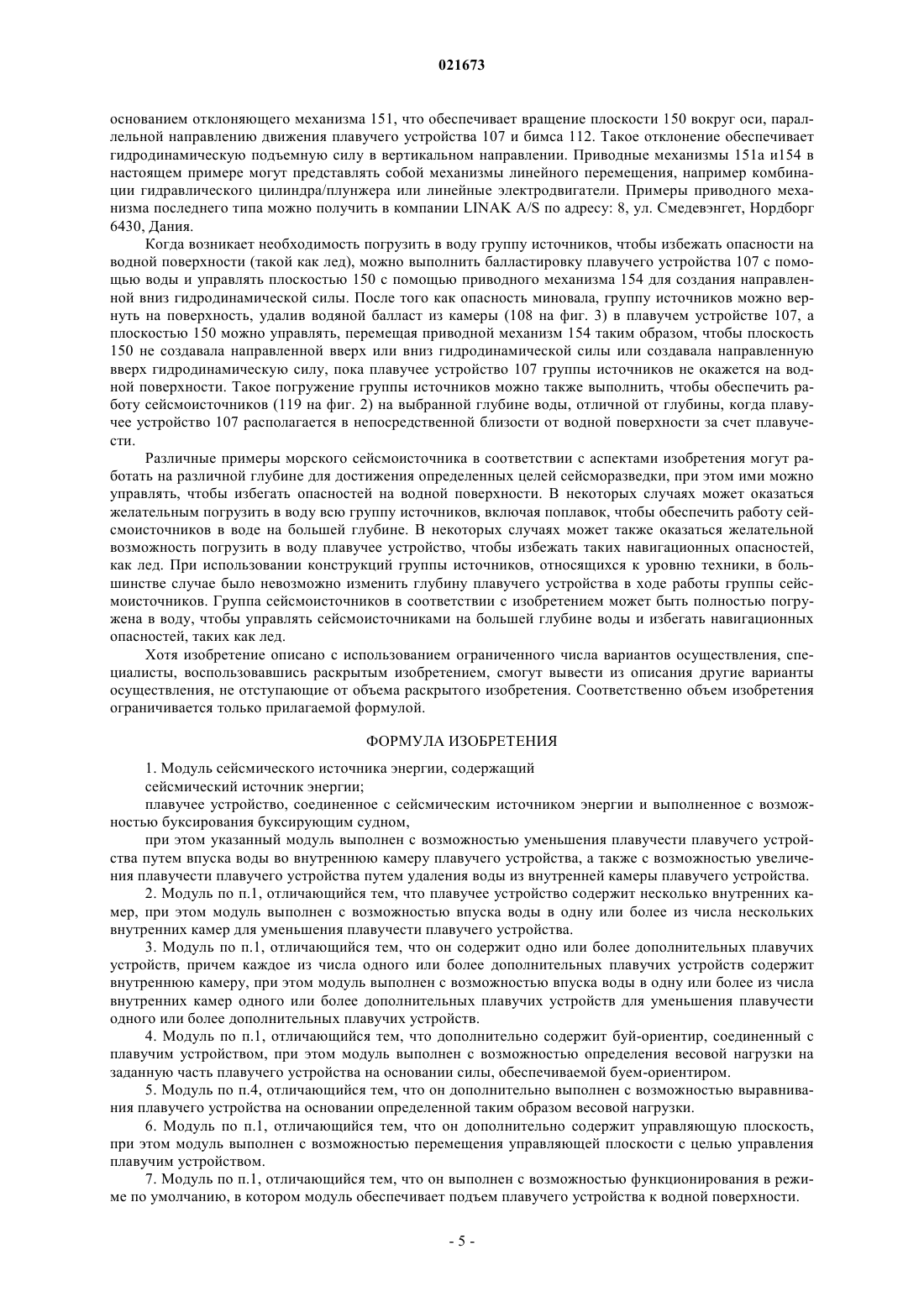
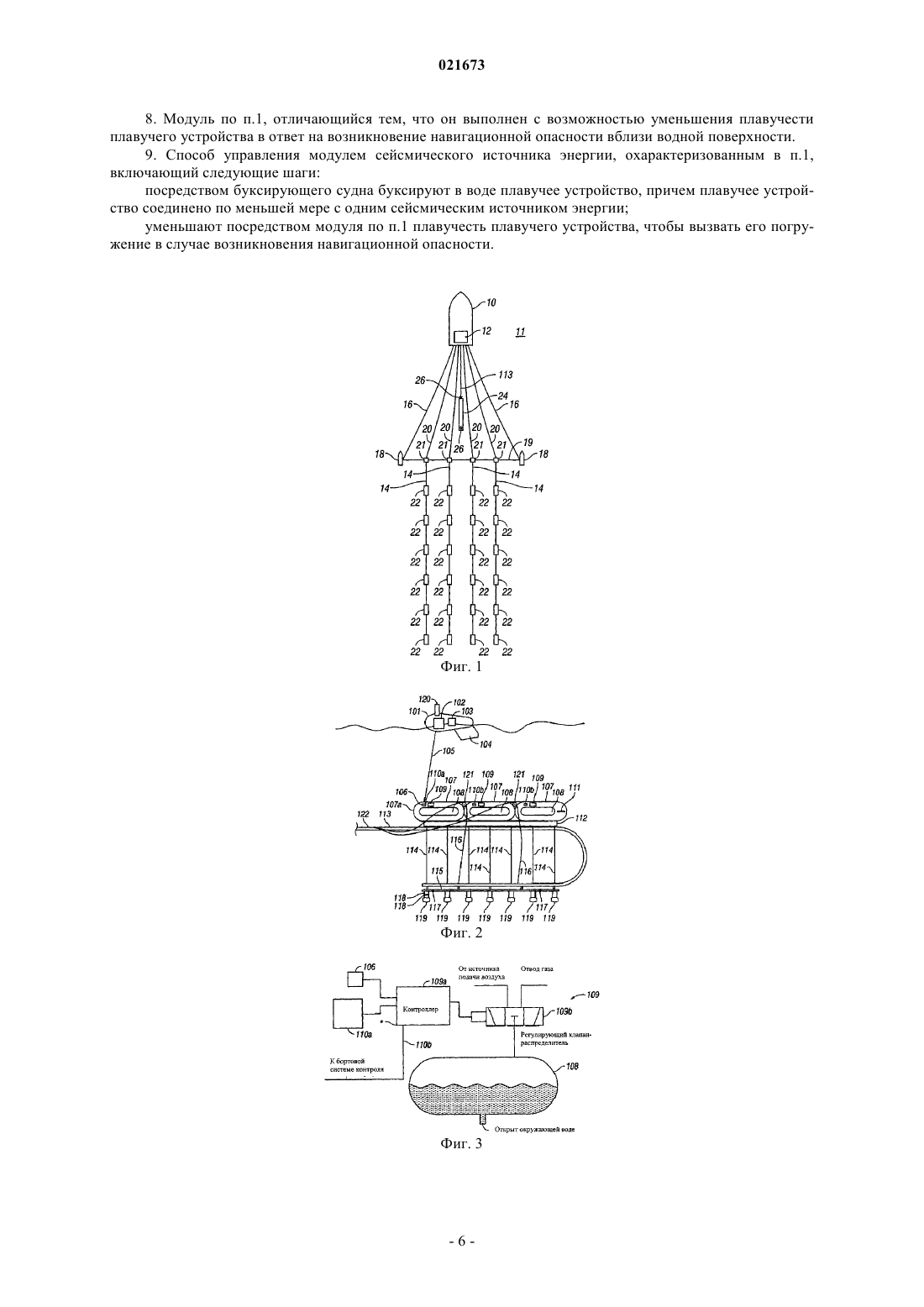
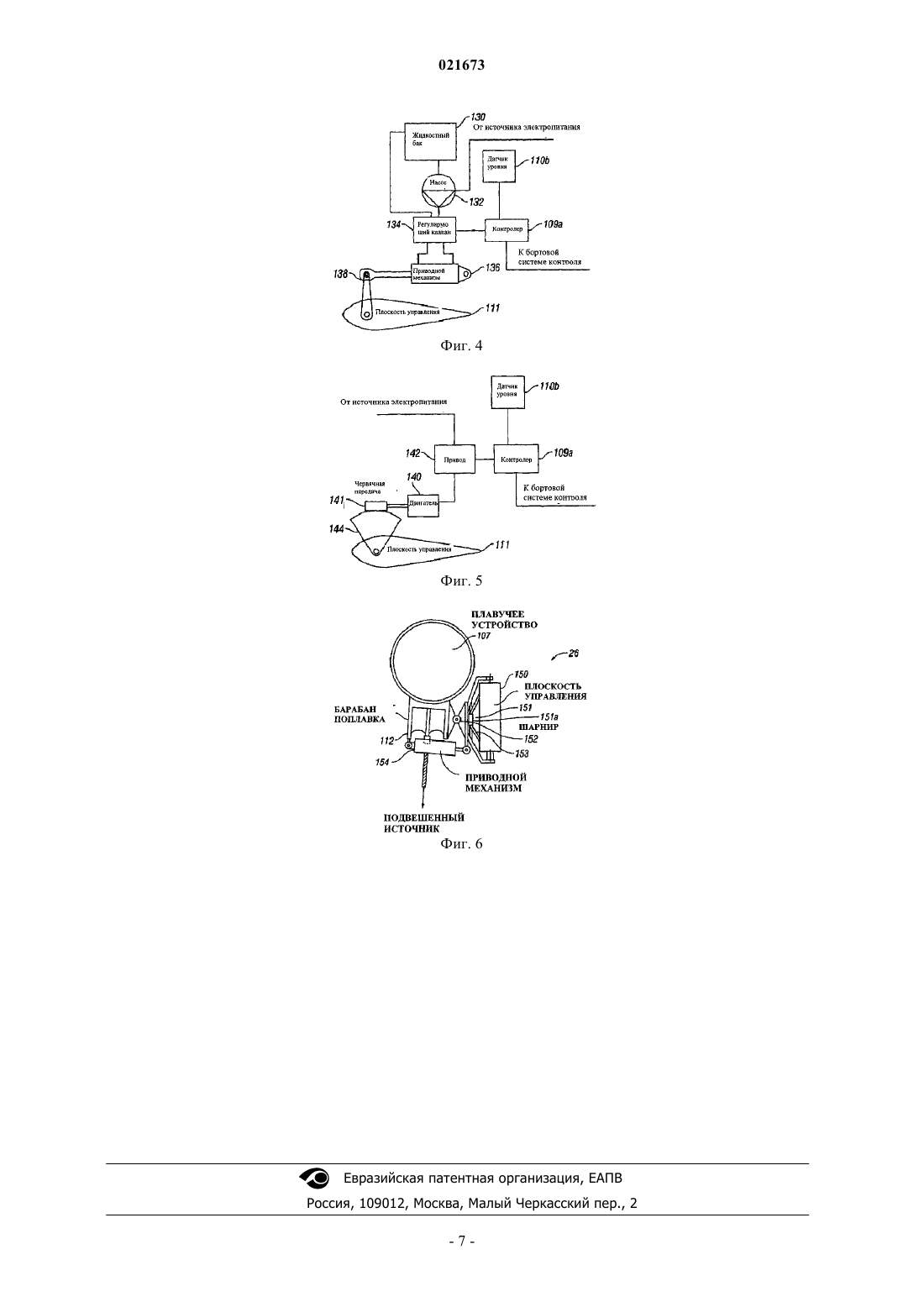
СЕЙСМИЧЕСКИЙ ИСТОЧНИК ЭНЕРГИИ И СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ЭТОГО ИСТОЧНИКА В изобретении управляемый сейсмический источник энергии включает по меньшей мере одно плавучее устройство. Плавучее устройство снабжено устройством для изменения его плавучести. Предусмотрена рама, присоединенная по меньшей мере к одному плавучему устройству. По меньшей мере один сейсмоисточник подвешен на раме. По меньшей мере одно устройство управления соединено с плавучим устройством или рамой. По меньшей мере одно устройство управления включает по меньшей мере одну поверхность управления и приводной механизм поверхности управления, соединенный с поверхностью управления. Приводной механизм выполнен с возможностью вращения поверхности управления для создания гидродинамической подъемной силы, по меньшей мере, в вертикальном направлении.(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) Область техники, к которой относится изобретение Настоящее изобретение в целом относится к области сейсморазведки. Конкретнее, изобретение относится к устройствам навигационного управления группой морских сейсмоисточников, подвешенных в воде на плавучем устройстве, для устранения навигационных опасностей. Предшествующий уровень техники В морской сейсморазведке сейсмоисточник используется для генерации сейсмических колебаний в форме акустических импульсов или волн в водоеме, например озере или океане. Сейсмическая волна распространяется в нижнем направлении в воде через подошву водного слоя и через формации геологической среды, расположенные ниже подошвы водного слоя. Часть волны, проходящей через формации геологической среды, расположенные ниже подошвы водного слоя, отражается в верхнем направлении от границ акустических импедансов в формациях геологической среды. Распространяющаяся в верхнем направлении сейсмическая волна регистрируется датчиками, такими как гидрофоны, буксируемыми в составе одной или нескольких сейсмических кос, расположенных вблизи водной поверхности, или датчиками, расположенными в косах, расположенных вдоль подошвы водного слоя. Датчики преобразуют зарегистрированную сейсмическую волну в электрические или оптические сигналы. После этого электрические или оптические сигналы предварительно обрабатываются и интерпретируются для получения информации о строении и составе различных формаций геологической среды. Эта информация используется, в частности, для определения возможности наличия в таких формациях месторождений полезных ископаемых, например углеводородов. Чаще всего используемым морским сейсмоисточником, известным специалистам, является "группа пневмопушек". Типовая группа пневмопушек представляет собой ряд отдельных пневмопушек различных размеров, буксируемых позади сейсморазведочного судна или судна возбуждения. Пневмопушки в конечном счете подвешены на буе, поплавке или аналогичном плавучем устройстве. Плавучее устройство обычно соединено с рамой или аналогичной, по существу, жесткой конструкцией, чтобы удерживать раму в воде в подвешенном состоянии. Отдельные пневмопушки, образующие группу, могут быть подвешены на раме с помощью канатов или цепей выбранной длины, позволяющих управлять работой пневмопушек в воде на выбранной глубине. В группах пневмопушек, известных специалистам, плавучее устройство может быть управляемым в плоскости водной поверхности, но при этом остается в непосредственной близости от водной поверхности из-за создаваемой им плавучести. Сущность изобретения Управляемый сейсмоисточник в соответствии с одним аспектом настоящего изобретения включает по меньшей мере одно плавучее устройство. Плавучее устройство снабжено устройством для изменения его плавучести. Предусмотрена рама, соединенная по меньшей мере с одним плавучим устройством. По меньшей мере один сейсмоисточник подвешен на раме. Предусмотрено по меньшей мере одно устройство управления, соединенное с плавучим устройством. По меньшей мере одно устройство управления включает по меньшей мере одну поверхность управления и приводной механизм поверхности управления, функционально соединенный с поверхностью управления. Приводной механизм выполнен с возможностью вращения поверхности управления для создания гидродинамической подъемной силы, по меньшей мере, в вертикальном направлении. Способ управления сейсмоисточником в водоеме в соответствии с другим аспектом настоящего изобретения включает подвешивание по меньшей мере одного сейсмоисточника на плавучем устройстве. Плавучее устройство буксируется в воде буксирующим судном. Плавучесть плавучего устройства уменьшают с целью вызвать его погружение в случае возникновения навигационной опасности вблизи водной поверхности. Прочие особенности и преимущества настоящего изобретения будут ясны из нижеследующего описания и прилагаемой формулы изобретения. Краткий перечень фигур чертежей На фиг. 1 показан пример системы сбора сейсмических данных; на фиг. 2 более подробно показана группа сейсмоисточников, представленная на фиг. 1; на фиг. 3 показан пример устройства управления балластировкой; на фиг. 4 показан один пример приводного механизма для приведения в действие поверхности управления на группе источников, представленной на фиг. 2; на фиг. 5 показан альтернативный приводной механизм для поверхности управления; на фиг. 6 показан другой пример сейсмоисточника, в котором не используется буй-ориентир. Сведения, подтверждающие возможность осуществления изобретения Пример морской системы сбора сейсмических данных, которая может использоваться с сейсмоисточником согласно настоящему изобретению, схематически показана на фиг. 1. Система сбора данных включает сейсморазведочное судно 10, которое движется по поверхности водоема 11, например озера или океана. Сейсморазведочное судно 10 везет оборудование, обозначенное в целом позицией 12 и для удобства называемое здесь "записывающей системой", которое может включать (не показанные отдельно на фиг. 1) устройства для записи данных, навигационные приборы, такие как приемники глобальной системы позиционирования (ГСП), и устройства управления сейсмоисточниками. Записывающая система 12 может также включать оборудование для работы с устройствами управления плавучестью и гидродинамической подъемной силой на одной или нескольких группах сейсмоисточников, как более подробно объясняется ниже. Система сбора сейсмических данных может включать ряд сейсмических кос 14, буксируемых сейсморазведочным судном 10, как показано на фиг. 1, или другим судном (не показано). Сейсмические косы 14 обычно представляют собой кабели, которые тянутся за буксирующим судном на определенное расстояние, причем каждая такая коса 14 включает сейсмические датчики 22, расположенные на ней в пространственно разнесенных местах. Сейсмические датчики 22, как правило, представляют собой датчики,реагирующие на давление или временной градиент давления, например гидрофоны, но могут также быть датчиками, реагирующими на движение частиц, такими как акселерометры или геофоны, или представлять собой комбинации гидрофонов и геофонов. Тип датчика не ограничивает объем настоящего изобретения. Геометрические характеристики сейсмических кос в воде поддерживаются различными буксирующими устройствами, включая создающие боковое усилие устройства, называемые "параванами" 18,которые расположены на конце буксировочных канатов 16 параванов. Передние концы сейсмических кос 14 присоединены к соответствующему концевому устройству 21, которое соединяет сейсмическую косу 14 с соответствующим буксировочным тросом-кабелем 20. Буксировочные канаты 16 параванов и буксировочные тросы-кабели 20 могут спускаться с судна 10 и втягиваться на него с помощью лебедок (не показаны) или аналогичных устройств для намотки канатов, известных специалистам. Боковой интервал между параванами 18 может в конечном счете ограничиваться распределительным тросом 19 для сохранения геометрических характеристик всей группы сейсмических кос 14. В некоторых примерах центральную секцию распределительного троса 19 можно исключить. Сейсморазведочное судно 10 или другое судно (не показано) может также буксировать одну или несколько групп сейсмоисточников 24. Только одна такая группа показана на фиг. 1 для ясности иллюстрации. Группа сейсмоисточников 24, как правило, включает ряд сейсмических источников энергии,которые в настоящем примере могут представлять собой пневмопушки, имеющие различные размеры камер, как объясняется выше. После правильно синхронизированной по времени активации отдельных пневмопушек в группе 24 (как правило, с помощью сигналов управления от записывающей системы 12) сейсмический импульс с конкретным спектральным составом направляется в воду 11. Сейсмические сигналы, возникающие в результате такой активации, регистрируются сейсмическими датчиками 22, а зарегистрированные сигналы передаются на записывающую систему 12. Способ записи и обработки сигналов, зарегистрированных различными сейсмическими датчиками 22, хорошо известен специалистам и не обсуждается далее в настоящем документе. Группа сейсмоисточников 24 может буксироваться судном 10 с использованием шлангокабеля 113. Группа сейсмоисточников 24 может включать устройство управления 26, расположенное поблизости от одного или каждого из ее продольных концов. Шлангокабель 113 может включать (не показанный отдельно) силовой элемент для передачи буксировочного усилия судна 10 на группу сейсмоисточников 24,одну или несколько линий сжатого воздуха или газа и электрические и/или оптические проводники для обеспечения связи между различными компонентами группы источников 24 и записывающей системой 12. Как объясняется ниже, устройство управления 26 может обеспечивать управляемость группы сейсмоисточников 24 как в боковом направлении, так и по глубине. В одном примере устройство управления 26 может использовать единственную лебедку или крыло для осуществления управления в вертикальном и горизонтальном направлениях. Группа сейсмоисточников 24 может также включать одно или несколько плавучих устройств (см. фиг. 2 и 3), которые обеспечивают управляемую плавучесть группы сейсмоисточников 24. Пример группы сейсмоисточников 24 схематически показан на фиг. 2. Группа сейсмоисточников 24 может буксироваться сейсморазведочным судном (10 на фиг. 1) за кормовую оконечность шлангокабеля 113, как объяснялось выше. Группа сейсмоисточников 24 в настоящем примере включает главный килевой брус, или мидель-бимс 112, который, как правило, соединен со шлангокабелем 113. На бимсе 112 с помощью канатов управления глубиной погружения 114 подвешена вспомогательная рама 115, находящаяся на выбранном расстоянии от бимса. Один или несколько сейсмоисточников 119 (например, пневмопушек) могут быть подвешены на вспомогательной раме 115 с помощью цепей 118 или аналогичных подвесных устройств. Определение глубины источников может выполняться с помощью датчиков глубины крепления 117 (например, датчиков давления), расположенных на известном расстоянии по вертикали от сейсмоисточников 119. Количество сейсмоисточников в любом конкретном варианте осуществления не ограничивает объем настоящего изобретения, которое также не ограничивается пневмопушками. Настоящее изобретение может также использоваться с морскими вибраторами и гидропушками в качестве неограничивающих примеров. Мидель-бимс 112 можно подсоединить к одному или нескольким плавучим устройствам 107, каждое из которых состоит из некоторого количества плавучего материала для заполнения пустот, например пенополистирола или пенополиуретана, заключенного в герметичный корпус (совместно показаны позицией 107 а). Внутренний объем корпуса может содержать одну или несколько непроницаемых для жидкости камер 108 для балластировки с помощью воды. Таким образом, каждое плавучее устройство 107 об-2 021673 ладает управляемой плавучестью. В настоящем примере представлены три таких плавучих устройства 107. Другие примеры, один из которых объясняется ниже со ссылкой на фиг. 6, может включать только одно такое плавучее устройство. Количество таких плавучих устройств определяется по усмотрению разработчика группы источников в соответствии с различными аспектами настоящего изобретения и не ограничивает объем настоящего изобретения. Возможное преимущество использования нескольких плавучих устройств, как показано в настоящем примере, состоит в обеспечении лучшего контроля над выравниванием группы источников 24. Балластировкой можно управлять с помощью устройства регулирования плавучести 109. Устройство регулирования плавучести 109 (объясняемое ниже со ссылкой на фиг. 3) может работать автоматически в зависимости от измерений, выполненных с помощью датчика глубины (например, давления) 110 а,весового датчика 106 и датчиков уровня или угла наклона 110b. Поверхность управления 111 можно использовать для корректировки временных колебаний глубины и/или уровня. Пример механизма для работы с поверхностью управления 111 объясняется со ссылкой на фиг. 4. Размеры корпуса, материал для заполнения пустот, материал корпуса и внутренние камеры 108 можно выбирать таким образом, чтобы плавучие устройства 107 обеспечивали достаточную силу плавучести для подъема плавучих устройств 107 к водной поверхности, когда вся вода удаляется из камер(ы) 108, и могли обеспечивать нейтральную или немного отрицательную плавучесть, когда камера(ы) 108 до конца заполнены балластной водой. В некоторых примерах поверхностный буй-ориентир 101 с хвостовым стабилизатором 104 для стабилизации движения в воде может быть подвешен впереди на самом переднем из плавучих устройств 107 с помощью троса, кабеля или каната 105. Канат 105 может быть подсоединен одним концом к весовому датчику 106. Измерения, выполненные весовым датчиком 106, показывают, какую весовую нагрузку на буй-ориентир 101 создает передняя часть группы источников 24. Такие весовые данные можно использовать, чтобы регулировать балласт плавучего устройства для корректировки плавания группы источников 24 в целях ее выравнивания. Измерения с помощью весового датчика показывают также, не оторвался ли буй-ориентир 101. Другой конец каната 105 может быть присоединен к блоку лебедки 102, расположенному на буеориентире 101 для управления глубиной группы источников. Управление блоком лебедки 102 может осуществлять модуль управления и связи 103. Модуль связи 103 может обмениваться сигналами с записывающей системой (12 на фиг. 1), используя, например, линию радиосвязи. Приемник ГСП 120 может размещаться на буе-ориентире 101 для определения геодезического положения. В других примерах поверхностный буй-ориентир 101 может быть исключен. Если,например, нужно увеличить глубину группы источников, сигнал может передаваться от записывающей системы (12 на фиг. 1) на модуль связи 103. Модуль связи 103 управляет лебедкой 102 для вытягивания каната 105. Два или несколько загрузочно-разгрузочных кабеля 116 могут быть пропущены через бимс 112 и соответствующие направляющие блоки 121. Загрузочно-разгрузочные кабели 116 протянуты от плавучих устройств 107 до точки крепления 122 на шлангокабеле 113. Точка крепления 122 может располагаться на выбранном расстоянии впереди плавучих устройств 107. Загрузочно-разгрузочные кабели 116 можно использовать для размещения в воде и подъема группы источников 24. Пример одного из устройств управления плавучестью 109 схематически показан на фиг. 3. Контроллер 109 а, например микропроцессор, может принимать в качестве входных данных результаты измерений от одного из датчиков угла наклона 110b и датчиков глубины (давления) 110 а. Контроллер 109 а может также обмениваться сигналами с записывающей системой (12 на фиг. 1). Самое переднее из устройств управления плавучестью 109 может принимать в качестве входных данных сигналы от весового датчика 106. В настоящем примере часть веса группы источников в воде (24 на фиг. 2) может поддерживаться буем-ориентиром (101 на фиг. 2). Сила плавучести, создаваемая буемориентиром (101 на фиг. 2), будет измеряться весовым датчиком 106. Если измеренная сила выходит за пределы заданного диапазона, балластировка может регулироваться устройством управления плавучестью 109. Если при требуемой нагрузке на буй-ориентир нужная глубина не достигается, лебедка (102 на фиг. 2) должна изменить длину выпущенного каната (105 на фиг. 2). Такое изменение может быть выполнено, например, с помощью передачи результатов измерения весового датчика 106 на записывающую систему (12 на фиг. 1) по шлангокабелю (113 на фиг. 1), который передает сигнал на буй-ориентир (101 на фиг. 2), давая команду лебедке (102 на фиг. 2) дополнительно выпустить канат (105 на фиг. 2). Выход контроллера 109 а можно подключить к трехпутевому пневмораспределителю с электромагнитным управлением 109b. Когда сигналы от одного или нескольких датчиков (например, датчика глубины 110 а, датчика угла наклона 110b и весового датчика 106) показывают, что плавучесть следует увеличить, контроллер 109 а подает команду пневмораспределителю 109b на подключение источника сжатого воздуха или газа (не показан) к камере 108. Газ, подаваемый под давлением от источника сжатого газа(не показан), может вытеснить воду из камеры 108, тем самым увеличивая плавучесть конкретного плавучего устройства (107 на фиг. 2). После достижения нужной плавучести контроллер 109 а может дать команду пневмораспределителю 109b на закрытие камеры 108, тем самым поддерживая уровень воды в камере 108. В случае, если плавучесть необходимо уменьшить, контроллер 109 а может дать команду пневмораспределителю 109b на выпуск газа из камеры 108, чтобы вода могла попасть в нижнюю часть камеры 108. Контроллер 109 а можно запрограммировать на управление пневмораспределителем 109b для поддержания плавучего устройства (107 на фиг. 2) на выбранной глубине в воде. Выбранную глубину можно изменять, например, передавая сигнал управления от записывающей системы (12 на фиг. 1) на контроллер 109 а, например, по сигнальной линии (не показана отдельно) в шлангокабеле (113 на фиг. 2). Такой сигнал может быть преобразован в контроллере 109 а в сигнал селективного управления пневмораспределителем 109b. В одном примере клапан 109b выполнен с возможностью, в случае неисправности электрического или другого компонента в группе источников (24 на фиг. 1), приведения клапана 109b в режиме по умолчанию или в режиме отказа в такое положение, при котором камера 108 подключается к источнику сжатого воздуха или газа. При такой конфигурации камера(ы) 108 будет автоматически продуваться, освобождаясь от воды, и группа источников (24 на фиг. 1) будет возвращаться к водной поверхности в случае отказа одного из компонентов. Пример механизма для работы с поверхностью управления 111 схематически показан на фиг. 4. В настоящем примере используется гидравлический привод 136, присоединенный с помощью подходящей рычажной передачи 138 с поверхностью управления 111. Привод может приводиться в действие электромагнитным клапаном 134, подключенным для обмена сигналами к контроллеру 109 а. Гидравлическая мощность для перемещения привода может обеспечиваться насосом 132, соединенным с гидравлическим баком 130. Контроллер 109 а можно запрограммировать для управления клапаном 134, тем самым приводя поверхность управления 111 в действие таким образом, что связанное с ней плавучее устройство (107 на фиг. 2) поддерживается на выбранной глубине, или выравнивается, когда положение группы источников (24 на фиг. 1) становится неровным (глубина с одной стороны больше, чем с другой). Регулирующий клапан 134 может содержать тормозной гидроклапан (не показан отдельно) для блокирования движения гидравлического привода 136, тем самым делая поверхность управления 111 устойчивой к смещению под действием силы, создаваемой перемещением группы источников в воде. Такой тормозной клапан можно реализовать, используя, например, трехходовой распределитель, показанный выше для электромагнитного клапана 134. В типовом трехходовом клапане-распределителе в центральном положении все отверстия клапана закрыты, тем самым перекрывая движение гидравлической жидкости внутрь привода 136 и из него наружу. Другой пример механизма для работы с поверхностью управления 111 схематически показан на фиг. 5. Контроллер 109 а может быть подключен для обмена сигналами к приводу электродвигателя 142,который управляет электродвигателем 140. Двигатель 140 может поворачивать червячную передачу 141. Червячная передача может находиться в контакте с зубчатым сектором 144. Смещаясь под действием червячной передачи 141, сектор 144 может поворачивать поверхность управления 111. Возможное преимущество механизма, показанного на фиг. 5, состоит в том, что двигатель 140 и червячная передача 141 не вращаются, а действуют таким образом, чтобы зафиксировать положение сектора 144, тем самым делая поверхность управления устойчивой к смещению под действием силы, создаваемой перемещением группы источников в воде. В описанном примере группой источников можно управлять на выбранной глубине в воде, изменяя плавучесть плавучих устройств (107 на фиг. 2), как объясняется выше, и воздействуя на поверхность управления (111 на фиг. 2). Длину каната или троса (105 на фиг. 2) можно регулировать с помощью блока лебедки (102 на фиг. 2) для поддержания выбранного натяжения троса (105 на фиг. 2), измеренного весовым датчиком (106 на фиг. 2), независимо от рабочей глубины группы источников (24 на фиг. 1). В других примерах группы источников (24 на фиг. 1) буй-ориентир (101 на фиг. 2) можно исключить. Такие примеры могут использоваться в районах, где вероятно столкновение со льдом или другие навигационные опасности на поверхности воды (11 на фиг. 1). В случае столкновения с любой навигационной опасностью плавучим устройствам (107 на фиг. 2) можнопридать отрицательную плавучесть за счет балластировки с помощью воды, как объясняется выше, при этом могут быть приведены в действие несколько устройств управления 26, чтобы погрузить группу источников в воду и переместить ее на большую глубину. Пример группы источников, для которой можно исключить применение буя-ориентира и использовать одно или несколько устройств управления (26 на фиг. 1), показан на фиг. 6. В настоящем примере устройства управления может применяться только одно плавучее устройство 107, соединенное с бимсом 112 и имеющее продольный размер приблизительно такой же, как размер верхней части бимса 112. Бимс 112 может быть снабжен управляющим крылом или плоскостью 150, которая может быть соединена с механизмом 151 (включая привод 151 а и соответствующую передачу 153), обеспечивающим вращение плоскости 150 вдоль оси, перпендикулярной направлению движения плавучего устройства 107 (т.е. его продольного измерения) и бимса 112 в воде. Такое вращение плоскости 150 может создать боковую гидродинамическую подъемную силу при движении группы источников (24 на фиг. 1) в воде. Боковую гидродинамическую подъемную силу можно использовать для позиционирования группы источников в выбранном положении относительно буксирующего судна (например, судна 10 на фиг. 1). Устройство управления 26 может также содержать механизм, включающий привод 154 и шарнир 152, соединенный с основанием отклоняющего механизма 151, что обеспечивает вращение плоскости 150 вокруг оси, параллельной направлению движения плавучего устройства 107 и бимса 112. Такое отклонение обеспечивает гидродинамическую подъемную силу в вертикальном направлении. Приводные механизмы 151 а и 154 в настоящем примере могут представлять собой механизмы линейного перемещения, например комбинации гидравлического цилиндра/плунжера или линейные электродвигатели. Примеры приводного механизма последнего типа можно получить в компании LINAK A/S по адресу: 8, ул. Смедевэнгет, Нордборг 6430, Дания. Когда возникает необходимость погрузить в воду группу источников, чтобы избежать опасности на водной поверхности (такой как лед), можно выполнить балластировку плавучего устройства 107 с помощью воды и управлять плоскостью 150 с помощью приводного механизма 154 для создания направленной вниз гидродинамической силы. После того как опасность миновала, группу источников можно вернуть на поверхность, удалив водяной балласт из камеры (108 на фиг. 3) в плавучем устройстве 107, а плоскостью 150 можно управлять, перемещая приводной механизм 154 таким образом, чтобы плоскость 150 не создавала направленной вверх или вниз гидродинамической силы или создавала направленную вверх гидродинамическую силу, пока плавучее устройство 107 группы источников не окажется на водной поверхности. Такое погружение группы источников можно также выполнить, чтобы обеспечить работу сейсмоисточников (119 на фиг. 2) на выбранной глубине воды, отличной от глубины, когда плавучее устройство 107 располагается в непосредственной близости от водной поверхности за счет плавучести. Различные примеры морского сейсмоисточника в соответствии с аспектами изобретения могут работать на различной глубине для достижения определенных целей сейсморазведки, при этом ими можно управлять, чтобы избегать опасностей на водной поверхности. В некоторых случаях может оказаться желательным погрузить в воду всю группу источников, включая поплавок, чтобы обеспечить работу сейсмоисточников в воде на большей глубине. В некоторых случаях может также оказаться желательной возможность погрузить в воду плавучее устройство, чтобы избежать таких навигационных опасностей,как лед. При использовании конструкций группы источников, относящихся к уровню техники, в большинстве случае было невозможно изменить глубину плавучего устройства в ходе работы группы сейсмоисточников. Группа сейсмоисточников в соответствии с изобретением может быть полностью погружена в воду, чтобы управлять сейсмоисточниками на большей глубине воды и избегать навигационных опасностей, таких как лед. Хотя изобретение описано с использованием ограниченного числа вариантов осуществления, специалисты, воспользовавшись раскрытым изобретением, смогут вывести из описания другие варианты осуществления, не отступающие от объема раскрытого изобретения. Соответственно объем изобретения ограничивается только прилагаемой формулой. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Модуль сейсмического источника энергии, содержащий сейсмический источник энергии; плавучее устройство, соединенное с сейсмическим источником энергии и выполненное с возможностью буксирования буксирующим судном,при этом указанный модуль выполнен с возможностью уменьшения плавучести плавучего устройства путем впуска воды во внутреннюю камеру плавучего устройства, а также с возможностью увеличения плавучести плавучего устройства путем удаления воды из внутренней камеры плавучего устройства. 2. Модуль по п.1, отличающийся тем, что плавучее устройство содержит несколько внутренних камер, при этом модуль выполнен с возможностью впуска воды в одну или более из числа нескольких внутренних камер для уменьшения плавучести плавучего устройства. 3. Модуль по п.1, отличающийся тем, что он содержит одно или более дополнительных плавучих устройств, причем каждое из числа одного или более дополнительных плавучих устройств содержит внутреннюю камеру, при этом модуль выполнен с возможностью впуска воды в одну или более из числа внутренних камер одного или более дополнительных плавучих устройств для уменьшения плавучести одного или более дополнительных плавучих устройств. 4. Модуль по п.1, отличающийся тем, что дополнительно содержит буй-ориентир, соединенный с плавучим устройством, при этом модуль выполнен с возможностью определения весовой нагрузки на заданную часть плавучего устройства на основании силы, обеспечиваемой буем-ориентиром. 5. Модуль по п.4, отличающийся тем, что он дополнительно выполнен с возможностью выравнивания плавучего устройства на основании определенной таким образом весовой нагрузки. 6. Модуль по п.1, отличающийся тем, что он дополнительно содержит управляющую плоскость,при этом модуль выполнен с возможностью перемещения управляющей плоскости с целью управления плавучим устройством. 7. Модуль по п.1, отличающийся тем, что он выполнен с возможностью функционирования в режиме по умолчанию, в котором модуль обеспечивает подъем плавучего устройства к водной поверхности. 8. Модуль по п.1, отличающийся тем, что он выполнен с возможностью уменьшения плавучести плавучего устройства в ответ на возникновение навигационной опасности вблизи водной поверхности. 9. Способ управления модулем сейсмического источника энергии, охарактеризованным в п.1,включающий следующие шаги: посредством буксирующего судна буксируют в воде плавучее устройство, причем плавучее устройство соединено по меньшей мере с одним сейсмическим источником энергии; уменьшают посредством модуля по п.1 плавучесть плавучего устройства, чтобы вызвать его погружение в случае возникновения навигационной опасности.
МПК / Метки
МПК: G01V 1/38
Метки: энергии, способ, этого, источника, управления, источник, сейсмический, работой
Код ссылки
<a href="https://eas.patents.su/8-21673-sejjsmicheskijj-istochnik-energii-i-sposob-upravleniya-rabotojj-etogo-istochnika.html" rel="bookmark" title="База патентов Евразийского Союза">Сейсмический источник энергии и способ управления работой этого источника</a>
Сейсмический источник и способ генерации сейсмической волны в формации
Номер патента: 9204
Опубликовано: 28.12.2007
Авторы: Бест Бруно, Экерлин Йорг Эрнст
МПК: G01V 1/40, G01V 1/145
Метки: способ, сейсмической, сейсмический, источник, формации, генерации, волны
Формула / Реферат:
1. Сейсмический источник для использования в буровой скважине, содержащий исполнительный механизм, имеющий вращательную часть и возвратно-поступательную часть, преобразующее средство для преобразования вращения вращательной части в возвратно-поступательное движение возвратно-поступательной части, и корпус вибратора, который соединен с возвратно-поступательной частью исполнительного механизма посредством пружины. 2. Сейсмический источник по п.1,...
Морской сейсмический источник и способ выработки в водоеме сейсмических сигналов
Номер патента: 19483
Опубликовано: 30.04.2014
Авторы: Томпсон Мартин, Харпер Марк Френсис Люсьен
МПК: G01V 1/133, G01V 1/137
Метки: способ, источник, сигналов, сейсмических, сейсмический, водоеме, выработки, морской
Формула / Реферат:
1. Морской сейсмический источник, служащий для выработки сейсмических сигналов в полосе частот, который содержит резервуар для хранения воды, проток для соединения резервуара с водоемом, средство, побуждающее воду из резервуара протекать в водоем через проток, средство модулирования площади протока, чтобы модулировать поток воды из резервуара в водоем, так чтобы вырабатывать модулированный сигнал давления в водоеме и буферное средство,...
Трехосевой вибрационный сейсмический источник
Номер патента: 1902
Опубликовано: 22.10.2001
Авторы: Эванс Рис Майкл, Краувелл Джон Марк, Теске Джеймс Эдвард
МПК: H04R 11/00
Метки: источник, вибрационный, трехосевой, сейсмический
Формула / Реферат:
1. Вибрационный сейсмический источник, который выполнен с возможностью избирательного создания сейсмических волн сжатия и сдвига в поверхность Земли, содержащий а) находящуюся в контакте с землей опорную плиту, которая передает энергию вибрации в поверхность Земли; б) опорную конструкцию, имеющую соединенный с ней шарнирный узел; в) стойки, жестко соединяющие опорную плиту и опорную конструкцию и создающую между ними зазор; г) узел вибрационного...
Морской сейсмический источник
Номер патента: 21032
Опубликовано: 31.03.2015
Авторы: Томпсон Мартин, Харпер Марк Френсис Люсьен
МПК: G01V 1/145
Метки: сейсмический, источник, морской
Формула / Реферат:
1. Морской сейсмический источник для создания сейсмических сигналов в полосе частот, содержащийпоршень;средство для создания вибраций поршня, чтобы создавать сейсмические сигналы;газовую пружину, воздействующую на поршень; исредство для изменения жесткости газовой пружины, чтобы изменять резонансную частоту вибраций поршня так, чтобы за счет этого изменять частоту формируемых сейсмических сигналов, излучаемых из поршня;отличающийся тем, что...
Способ и устройство управления работой сети в системе овкв и других областях
Номер патента: 13317
Опубликовано: 30.04.2010
Авторы: Кэсян Крис Эдвин, Перрин Уильям Эндрю, Квонг Роберт Кристофер, Видеман Джеффри Пол, Грауер Логан Брент, Лемон Джейсон Джон, Локхарт Кеннет Джон, Росснер Трэвор Льюис, Андерссон Йан Олоф, Николс Гленн Уильям
МПК: H01R 31/00
Метки: способ, устройство, областях, сети, работой, системе, других, управления, овкв
Формула / Реферат:
1. Соединительное устройство (310) для соединения множества сетевых устройств в гирляндную сеть посредством кабелей, по меньшей мере один из которых имеет два проводника, отличающееся тем, что содержит соединительный контур (330) и четыре последовательно включенных интерфейса (20, 22, 24, 26) кабеля, в том числе первый интерфейс (20) кабеля и последний интерфейс (26) кабеля, причем каждый интерфейс (20, 22, 24, 26) кабеля содержит пару...
Предыдущий патент: Модуляторы рецепторов сфингозин-1-фосфата и их применение
Следующий патент: Трубчатый изоляционный материал для низкотемпературной изоляции
Случайный патент: Футеровка мельницы