Система разгрузки множества уборочных машин
Номер патента: 16106
Опубликовано: 28.02.2012
Авторы: Берк Дэниел Дж., Адамсон Джеймс К., Депортер Марк К., Шедлер Алан Д., Чатурведи Сантош
Формула / Реферат
1. Система перемещения зерна, содержащая
зерновозку;
множество уборочных машин, включая первую уборочную машину и вторую уборочную машину, при этом первая уборочная машина выполнена с возможностью выгрузки зерна в зерновозку, получения зерна от второй уборочной машины и координации транспортировки зерна.
2. Система по п.1, в которой каждая уборочная машина содержит
устройство для транспортировки зерна, имеющее дальний конец;
зерновой бункер, имеющий открытую область;
устройство определения положения, выполненное с возможностью определения положения дальнего конца и/или открытой области; и
систему позиционирования, выполненную с возможностью расположения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера первой уборочной машины.
3. Система по п.2, в которой первая уборочная машина содержит опору, расположенную вблизи зернового бункера и выполненную с возможностью размещения и поддержания устройства для транспортировки зерна второй уборочной машины.
4. Система по п.3, в которой первая и/или вторая уборочная машина содержит по меньшей мере один датчик, выполненный с возможностью определения соответствующего расположения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера первой уборочной машины для предотвращения рассыпания зерна.
5. Система по п.4, в которой по меньшей мере один датчик выполнен с возможностью передачи информации второй уборочной машине, когда дальний конец устройства для транспортировки зерна второй уборочной машины не расположен соответствующим образом, тем самым приостанавливая работу устройства для транспортировки зерна второй уборочной машины самой второй уборочной машиной.
6. Система по п.2, в которой первая и/или вторая уборочная машина содержит по меньшей мере один датчик, выполненный с возможностью бесконтактного определения соответствующего положения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера первой уборочной машины для предотвращения рассыпания зерна.
7. Система по п.1, в которой каждая из первой и второй уборочных машин содержит устройство для транспортировки зерна, при этом устройство для транспортировки зерна первой уборочной машины выполнено с возможностью получения зерна от устройства для транспортировки зерна второй уборочной машины.
8. Уборочная машина, содержащая
контроллер;
устройство для транспортировки зерна, имеющее дальний конец;
зерновой бункер, имеющий открытую область, при этом контроллер выполнен с возможностью определения положения дальнего конца устройства для транспортировки зерна относительно открытой области зернового бункера другой уборочной машины и координации транспортировки зерна.
9. Машина по п.8, дополнительно содержащая опору, расположенную вблизи зернового бункера и выполненную с возможностью размещения и поддержания устройства для транспортировки зерна еще одной уборочной машины.
10. Машина по п.9, дополнительно содержащая по меньшей мере один датчик, выполненный с возможностью определения соответствующего положения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера другой уборочной машины для предотвращения рассыпания зерна.
11. Машина по п.10, в которой по меньшей мере один датчик выполнен с возможностью передачи информации на контроллер, когда дальний конец устройства для транспортировки зерна не расположен соответствующим образом, при этом контроллер выполнен с возможностью приостановки работы устройства для транспортировки зерна.
12. Машина по п.8, дополнительно содержащая один датчик, выполненный с возможностью бесконтактного определения соответствующего положения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера другой уборочной машины.
13. Машина по п.12, в которой по меньшей мере один датчик выполнен с возможностью передачи информации второй уборочной машине, когда дальний конец устройства для транспортировки не расположен соответствующим образом, при этом контроллер выполнен с возможностью приостановки работы устройства для транспортировки зерна в зависимости от указанной информации.
14. Способ выгрузки зерна, включающий этап перемещения зерна в первую уборочную машину из второй уборочной машины при перемещении и первой уборочной машины, и второй уборочной машины по полю, при этом первая уборочная машина выполнена с возможностью координации транспортировки зерна.
15. Способ по п.14, дополнительно включающий этап перемещения зерна из первой уборочной машины в движущуюся зерновозку одновременно с этапом перемещения зерна в первую уборочную машину.
16. Способ по п.15, дополнительно включающий этап координирования выпуска зерна из устройства для транспортировки зерна второй уборочной машины с открытой областью зернового бункера первой уборочной машины.
17. Способ по п.16, в котором этап координирования включает этап передачи информации о положении дальнего конца устройства для транспортировки зерна и/или зернового бункера между первой уборочной машиной и второй уборочной машиной.
18. Способ по п.17, в котором этап координирования включает этап передачи команды от первой уборочной машины ко второй уборочной машине для остановки транспортировки зерна из второй уборочной машины.
19. Способ по п.18, в котором устройство для транспортировки зерна находится в опоре, соединенной с первой уборочной машиной.
20. Способ по п.15, дополнительно включающий этап согласования перемещения зерновозки, первой уборочной машины и второй уборочной машины друг с другом при выполнении обоих этапов перемещения.
21. Способ по п.20, в котором этап согласования включает назначение зерновозки, первой уборочной машины или второй уборочной машины ведущим звеном, а остальных механизмов - ведомыми звеньями, при этом перемещение по полю всех звеньев контролируется ведущим звеном.

Текст
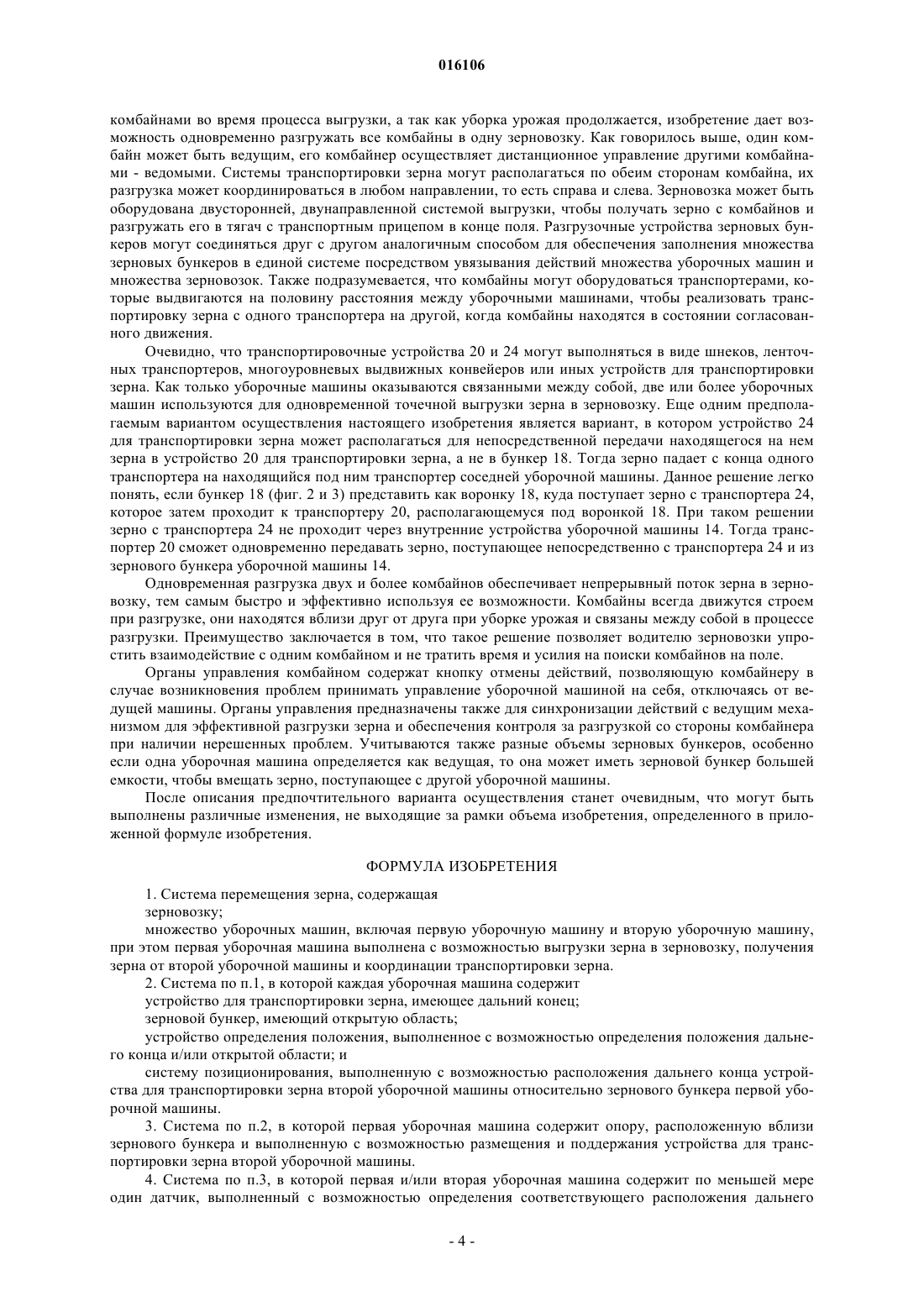
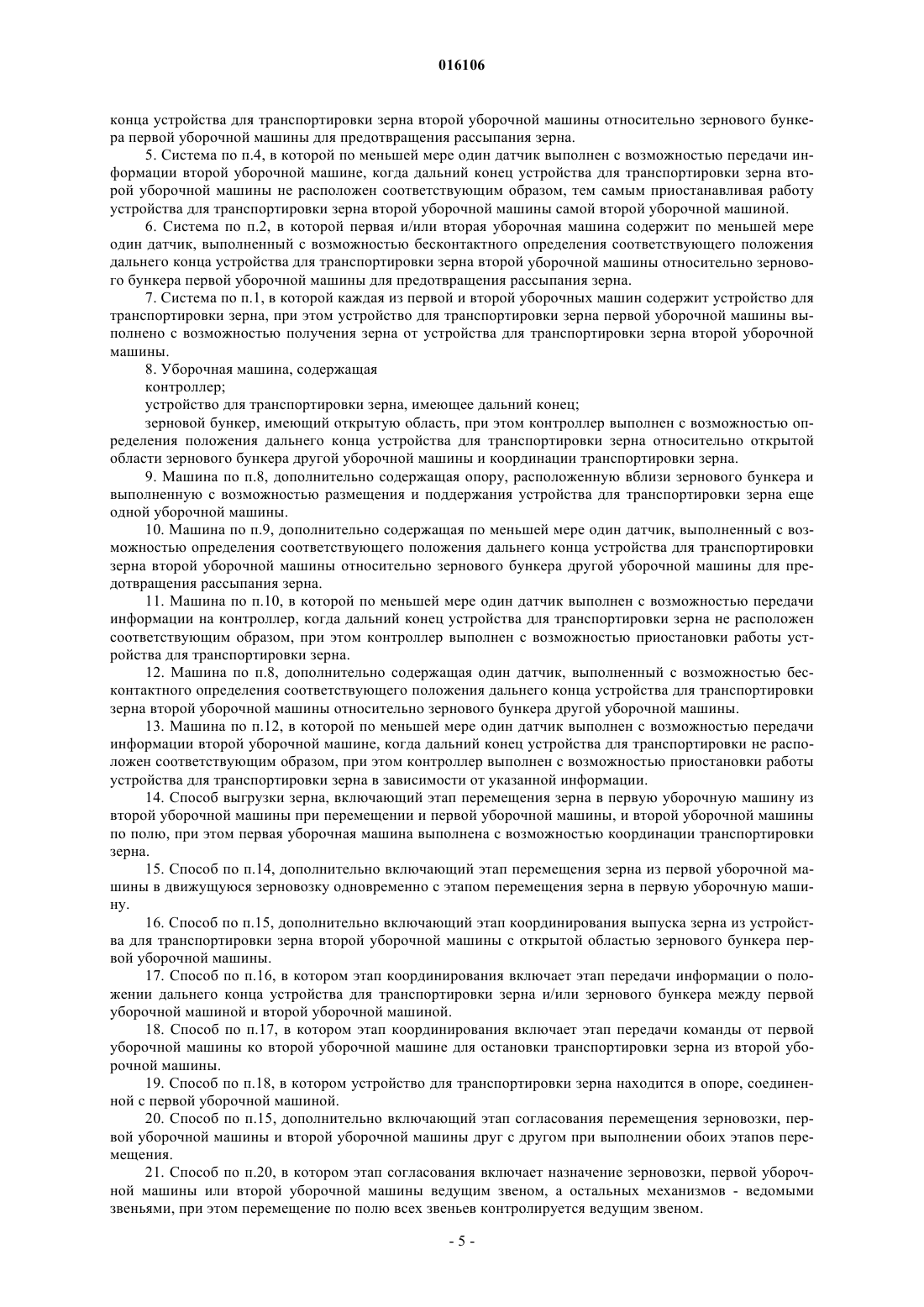
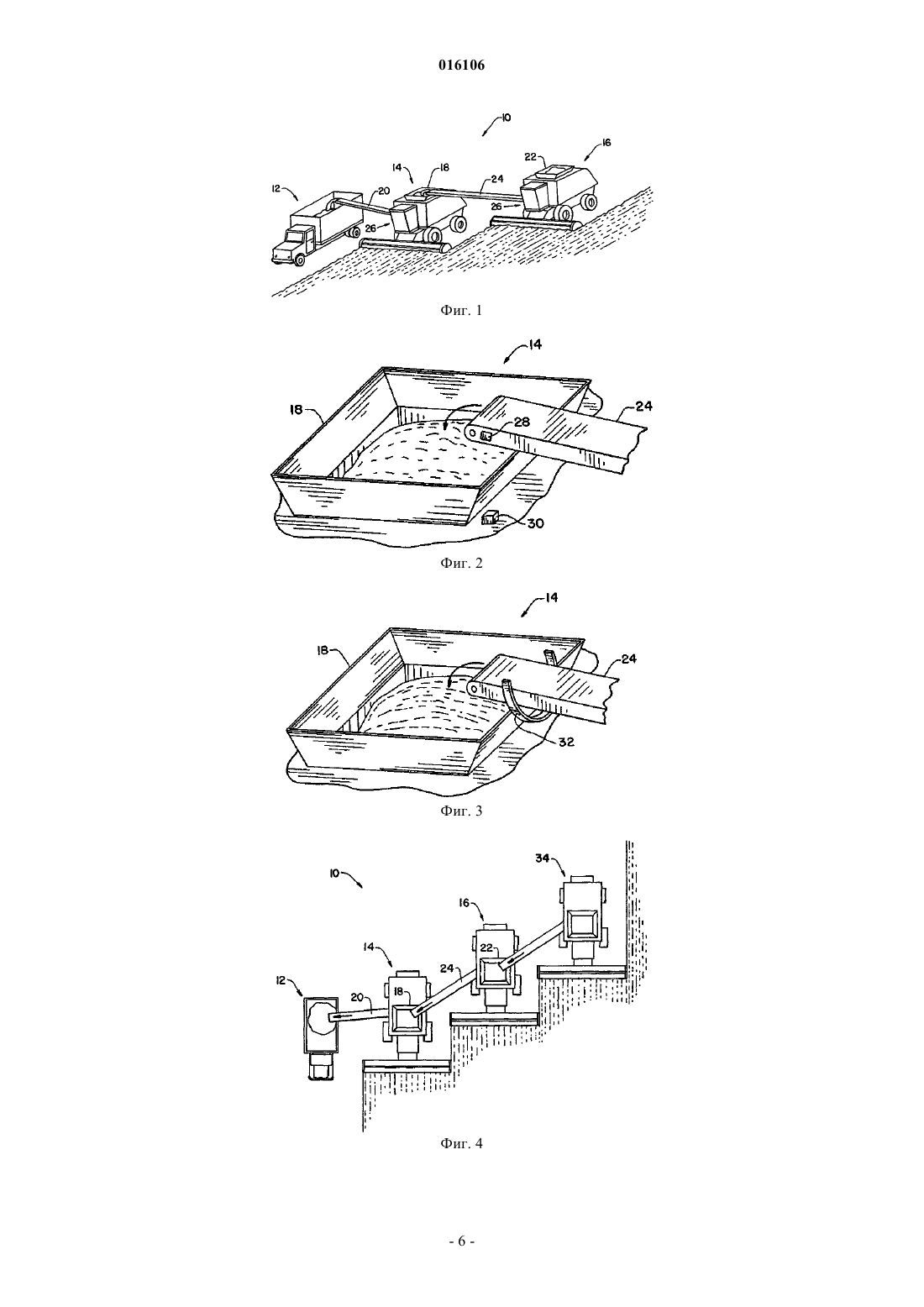
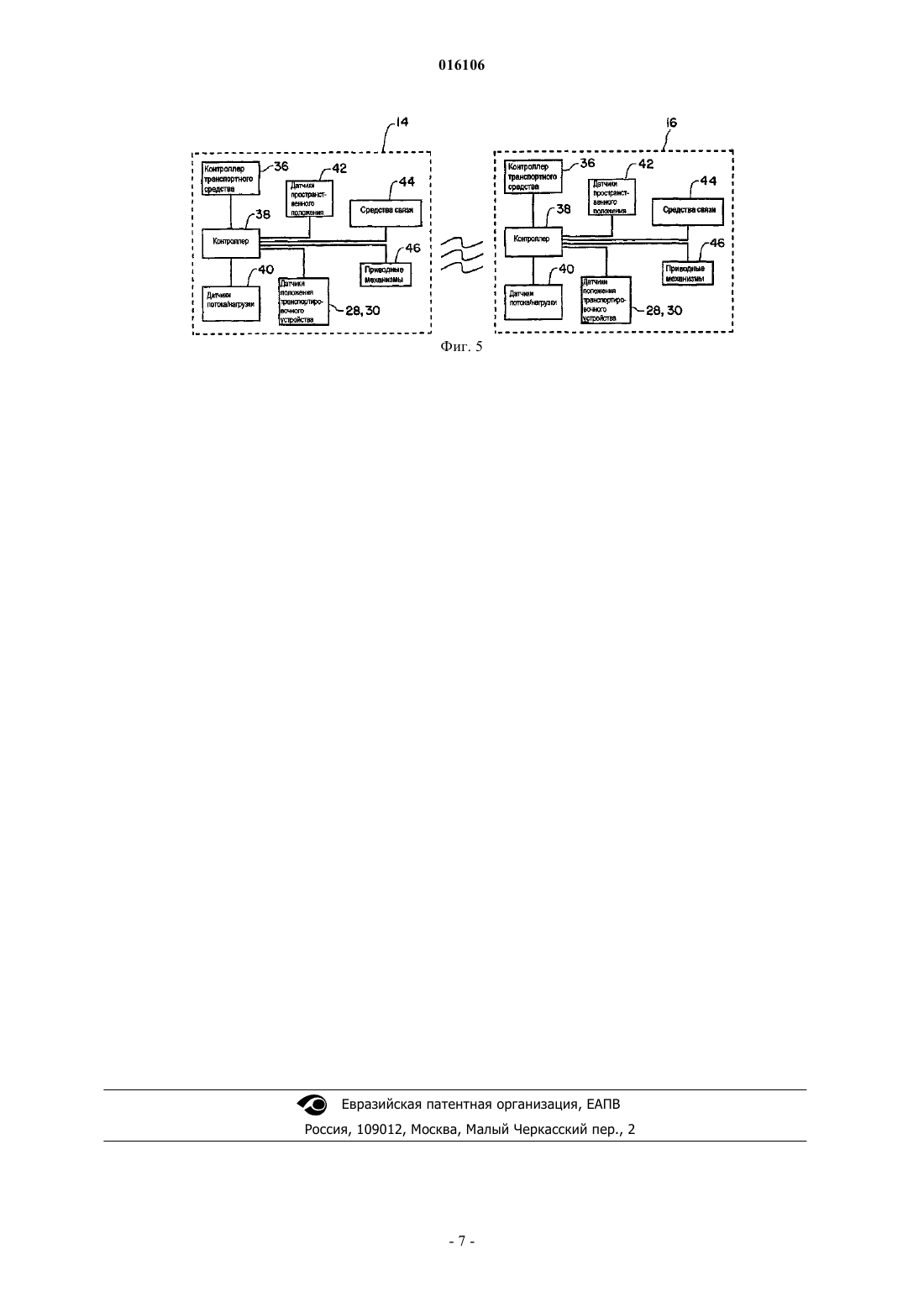
СИСТЕМА РАЗГРУЗКИ МНОЖЕСТВА УБОРОЧНЫХ МАШИН Система транспортировки зерна для точечной разгрузки уборочных машин в зерновозки. В системе используется множество уборочных машин, в том числе первая и вторая уборочные машины. Первая уборочная машина выполнена с возможностью выгрузки зерна в зерновозку, получения зерна из второй уборочной машины и координации транспортировки зерна.(71)(73) Заявитель и патентовладелец: ДИР ЭНД КОМПАНИ (US) 016106 Область техники, к которой относится изобретение Настоящее изобретение относится к сельскохозяйственным уборочным машинам, а более конкретно к ведущей-ведомой системе разгрузки уборочных машин. Уровень техники Сельскохозяйственная уборочная машина, например комбайн, - это крупногабаритная машина, используемая для уборки различных культур с полей. В передней части комбайна располагается жатка,срезающая созревшие культуры. Жатка размещается на приемной камере молотилки, передающей зерновой материал в комбайн для обмолота. Узлы обмолота и сепарации комбайна отделяют зерно от зернового материала и транспортируют очищенное зерно в зерновой бункер для временного хранения. Зерновой материал, оставшийся после отделения зерна, выбрасывается позади комбайна и распределяется по полю. Выгрузной шнек или транспортер перемещает очищенное зерно из зернового бункера в грузовик или зерновозку для транспортировки. В патенте США 6216071 описано устройство и способ координации и контроля уборочных и транспортных операций сельскохозяйственных культур посредством использования в поле множества сельскохозяйственных машин. Составляется график прибытия зерновозок, чтобы они были готовы для разгрузки уборочных машин, когда объем собранной культуры в определенной уборочной машине достигает заданного уровня. В заявке на патент США 2006/0014489 описана система обеспечения движения, с помощью которой координируются перемещения уборочных машин в поле и разрабатываются маршруты их перемещения относительно друг друга так, чтобы избежать их столкновений, особенно в процессе разгрузки, когда зерно транспортируется в прицеп. В патенте Канады 2305606 описана конструкция, в которой управление транспортными средствами осуществляется из первого транспортного средства для поддержания заданного рабочего положения относительно первого транспортного средства с помощью глобальной системы позиционирования (GPS) или ультразвукового дальномерного оборудования. Вторым транспортным средством может быть автопогрузчик, в который перегружается зерно с зерноуборочной машины. В патенте Германии 10064862 описана система координирования действий сельскохозяйственных машин, работающих на одном поле, между которыми происходит перегрузка зерна, содержащая навигационную систему, установленную на одной из машин со средствами передачи данных между указанными машинами. Таким образом, в данной области техники существует необходимость в способе и устройстве координирования одновременной передачи зерна из множества уборочных машин. Сущность изобретения Изобретение в одном варианте относится к системе перемещения зерна, обеспечивающей точечную разгрузку уборочных машин, в зерновозку. Используется множество уборочных машин, включая первую и вторую уборочные машины. Первая уборочная машина выполнена с возможностью выгрузки зерна в зерновозку, получения зерна из второй уборочной машины и координации транспортировки зерна. Изобретение в другом варианте относится к способу выгрузки зерна, включающем этап перемещения зерна в первую и вторую уборочные машины при их перемещении по полю. Краткое описание чертежей Фиг. 1 представляет собой вид в перспективе варианта осуществления системы транспортировки зерна согласно изобретению, содержащей принимающую зерно машину и два комбайна; фиг. 2 - вид в перспективе части системы транспортировки зерна, показанной на фиг. 1; фиг. 3 - вид в перспективе части системы транспортировки зерна, показанной на фиг. 1; фиг. 4 - вид сверху варианта осуществления системы транспортировки зерна согласно изобретению; фиг. 5 - схематичное изображение элементов системы транспортировки зерна, показанной на фиг. 1-4. Подробное описание изобретения На фиг. 1 показана система 10 перемещения или передачи зерна, также именуемая системой 10 транспортировки зерна, реализуемая посредством использования машины 12 для транспортировки зерна,зерноуборочной машины 14 и зерноуборочной машины 16. Машина 12 для транспортировки зерна может представлять собой любое транспортное средство, в том числе зерновозку 12 или, как показано на фиг. 1,грузовик 12 для перевозки зерна. Здесь термин зерновозка подразумевает любую перевозящую зерно машину для транспортировки зерна с поля в хранилище или на элеватор. Уборочная машина 14 содержит зерновой бункер 18 и устройство 20 для транспортировки зерна. Аналогично уборочная машина 16 содержит зерновой бункер 22 и устройство 24 для транспортировки зерна. Каждая зерноуборочная машина 14 и 16 имеет органы управления 26, размещенные в кабине. Зерно с помощью устройства 24 для транспортировки зерна перемещается от уборочной машины 16 и ссыпается в зерновой бункер 18 уборочной машины 14, а устройство 20 для транспортировки зерна перемещает зерно из уборочной машины 14 в зерновозку 12. Перемещение зерна от одной уборочной машины к другой ставит проблемы, которые и решаются в настоящем изобретении. Обычно выгрузка зерна из уборочных машин осуществляется в движущееся транспортное средство, например грузовик, при этом водители обеих машин согласовывают скорость-1 016106 движения, в то время как комбайн продолжает убирать зерно и передавать его на идущее рядом транспортное средство. Выгрузка осуществляется вручную или автоматически и реализуется потому, что перевозящая зерно машина имеет большую площадь кузова, куда перегружается зерно, что компенсирует небольшие погрешности в управлении при движении обеих машин. Кроме того, перемещение зерна осуществляется на высокой скорости, не принимая во внимание скорость поступления зерна в зерновой бункер уборочной машины. Когда осуществляется точечная выгрузка, как предлагается в настоящем изобретении, необходима не только точная координация работы транспортировочного механизма с положением открытой области зернового бункера, но должна быть и координация поступления зерна в зерновой бункер, чтобы являющаяся частью транспортировочной цепи уборочная машина не испытывала избыточного поступления зерна. Здесь термин координация перемещения зерна означает контроль положения устройства для перемещения зерна, а также контроль за поступлением зерна в первую уборочную машину из второй уборочной машины в зависимости или от заранее заданного потока зерна в или из первой уборочной машины или заранее заданного объема зерна в зерновом бункере первой уборочной машины. На фиг. 2 показан зерновой бункер 18, имеющий устройство 24 для транспортировки зерна, подающее зерно в бункер 18. Датчики 28 и 30 выполнены с возможностью передачи информации о положении дальнего конца устройства 24 по отношению к открытой области бункера 18. Датчики 28 и 30 способствуют передачи информации к приводным системам уборочной машины 16, которые изменяют положение дальнего конца устройства 24, чтобы не происходило столкновений между устройством 24 и зерновым бункером 18 или другими частями уборочной машины 14. Информация, поступающая от датчиков 28 и 30, также используется для регулирования устройства 24, чтобы поток зерна, подаваемый с дальнего конца устройства 24, направлялся к открытой области бункера 18 независимо от изменения положения,высоты над уровнем земли, скорости и маневров уборочной машины 14 и 16 при перемещении зерна. Поскольку уборочные машины 14 и 16 движутся по полю, зерно из зернового бункера 22 передается в зерновой бункер 18. Координация перемещения зерна заключается в обеспечении того, чтобы зерно от устройства 24 для транспортировки зерна продолжало поступать в бункер 18 независимо от изменений пространственного положения и скорости уборочных машин 14 и 16 относительно друг друга при их движении по полю. Хотя, как указывалось выше, датчики 28 и 30 могут взаимодействовать друг с другом, возможно использование только одного датчика для получения данных о положении зернового бункера относительно транспортирующего устройства или положении транспортирующего устройства относительно зернового бункера. Возможно также определение относительного положения транспортирующего устройства и зернового бункера с помощью алгоритма, основанного на данных от датчиков положения, установленных на уборочных машинах 14 и 16, и известной геометрии элементов уборочных машин 14 и 16, чтобы рассчитать положения дальнего конца транспортирующего устройства и открытой области зернового бункера. На фиг. 3 показана опора 32, закрепленная на зерновом бункере 18, на которую может опираться устройство 24 для транспортировки зерна. Когда устройство 24 для транспортировки зерна приближается к зерновому бункеру 18, оно располагается вблизи опоры 32, когда уборочные машины 14 и 16 движутся рядом по полю. Как только определено, что устройство 24 для транспортировки зерна заняло требуемое положение, оно затем опускается и опирается на опору 32. В этот момент некоторые из регулируемых опор устройства 24 ослабляются, поэтому оно может опираться на опору 32. После того как устройство 24 обопрется на опору 32, будут происходить некоторые изменения положения устройства 24,когда уборочные машины 14 и 16 будут двигаться. Однако данный вариант осуществления изобретения позволяет осуществлять и менее активный контроль за устройством 24 для транспортировки зерна - просто контролируется положение конца устройства 24 относительно открытой области бункера 18. На фиг. 4 показана третья уборочная машина 34, перемещающая зерно в уборочную машину 16, которая транспортирует его в уборочную машину 14, а последняя ссыпает его в зерновозку 12. Расстановка множества уборочных машин (фиг. 4) в настоящем изобретении предполагает, что они убирают урожай и перемещаются по полю. Координация системы 10 транспортировки зерна осуществляется по принципу ведущий-ведомый, когда одно из уборочных звеньев становится ведущим по отношению к другим уборочным звеньям и зерновозке. Например, уборочная машина 14 может быть обозначена как ведущая для уборочных машин 16 и 34 и зерновозки 12 и поддерживает с ними связь, при этом каждая из перечисленных машин сигнализирует о принятии такого положения. Такое решение требует от каждого ведомого звена координации своего движения по полю в соответствии с направлением движения уборочной машины 14. Здесь учитывается не только движение каждого звена, но также и координация перемещения зерна между звеньями. Так, если зерновозка 12 сообщила, что она наполнена, то ведущая уборочная машина 14 дает указание уборочной машине 16 остановить или замедлить перемещение зерна. Звено 16 аналогичным образом оценивает состояние бункера 22 и на основании свободного объема бункера дает указание механизму 34 продолжать, замедлить или остановить поток зерна. Если зерновой бункер 18 имеет достаточную емкость, когда зерновозка 12 прекращает быть ведомой по отношению к убороч-2 016106 ной машине 14, тогда транспортировка зерна может продолжаться, пока новая зерновозка (не показана) не станет ведомой для ведущего механизма 14, который затем направляет эту зерновозку 12 под загрузку зерном, после чего звено 14 возобновляет перемещение зерна устройством 20. В системе 10 транспортировки зерна первой будет опустошать свой зерновой бункер уборочная машина 34. После опорожнения бункера она уберет свое устройство для транспортировки зерна от зернового бункера 22 и прекратит выступать в роли ведомого по отношению к ведущему звену 14. Также предполагается, что звено 16 может быть ведущим звеном для звена 34, которое может определять звено 16 в качестве подчиненного ведущего/ведомого звена 16, что координирует перемещение уборочной машины 34 относительно звена 16, при этом звено 14 является ведущим для звена 16. Такая последовательно-приоритетная цепочка связей ведущий-ведомый может реализовываться для множества уборочных звеньев. Как только уборочное звено 34 прекращает являться частью системы 10 транспортировки зерна,управление уборочной машиной возвращается к водителю, так как сбор зерна продолжается. Аналогичным образом, когда звено 16 пустое, оно информирует звено 14 о том, что бункер 22 опустошен, и устройство 24 для транспортировки зерна отцепляется от бункера 18 подъемом устройства 24 с опоры 32 и установкой его в убранное положение. Точно так же, если для устройства 24 для транспортировки зерна применяется активное управление (фиг. 2), то оно отцепляется от бункера 18 после прекращения перемещения зерна и устанавливается в убранное положение. На фиг. 5 схематично показаны элементы уборочных машин 14 и 16, которые могут использоваться и в дополнительной уборочной машине 34 и других уборочных машинах. Контроллер 36 транспортного средства управляет двигателем и другими элементами уборочной машины и взаимодействует с контроллером 38, управляющим элементами согласно настоящему изобретению. Для простоты объяснения контроллер 38 считается отдельным контроллером, а его функции в виде алгоритма может выполнять контроллер 36, может также использоваться иное сочетание аппаратных и программных средств. Контроллер 38 взаимодействует с датчиками 28 и 30 положения транспортировочного устройства, датчиками 40 потока/нагрузки, датчиками 42 пространственного/относительного положения, средством 44 связи с уборочной машиной 16, которая при этом является ведомой для уборочной машины 14. Информация от датчиков 42 пространственного положения обеих уборочных машин 14 и 16 поступает на отдельные контроллеры 38 для приведения в действие приводных механизмов 46 звена 16 для регулирования положения дальнего конца устройства 24 для транспортировки зерна относительно зернового бункера 18. Датчики 42 пространственного положения, которые могут содержать системы GPS, предоставляют каждой уборочной машине информацию о пространственном положении. Данные от датчика 28 о пространственном положении устройства 24 передаются на уборочную машину 14, чтобы в режиме реального времени обеспечить управление по замкнутому циклу приводных механизмов 46 уборочной машины 16 так,что зерно сможет подаваться в бункер 18. Датчики 40 потока/нагрузки передают информацию контроллеру 38 относительно подачи зерна в соответствующие бункеры уборочных машин 14 и 16, а также о потоке зерна от них, перемещаемого конвейерно-шнековыми системами транспортировки. Датчики 28,30, 40 и 42 могут быть ультразвуковыми, световыми, бесконтактными или подобными. Если датчики 28 и 30 отдельно или на основании общего взаимодействия показывают, что дальний конец устройства 24 располагается не так, как требуется для транспортировки зерна, тогда контроллер 38 уборочной машины 16 прекращает транспортировку зерна, посылая об этом сигнал контроллеру 36. Как только будет установлено соответствующее положение дальнего конца транспортировочного устройства 24, тогда перемещение зерна будет возобновлено. Во время работы системы транспортировки зерна уборочные машины 14, 16 и 34 продолжают сбор урожая, что является причиной разных потоков зерна в бункеры уборочных машин. Объем и количество собираемого зерна изменяет количество зерна, поступающего в зерновой бункер, а также скорость перемещения зерна в соответствующие бункеры и из них. Объем потока и скорость изменения подачи зерна в каждый зерновой бункер рассматривается как координирование транспортировки зерна. Следовательно,реализация транспортировки охватывает регулирование потока по каждому устройству для транспортировки зерна путем измерения свободного объема соответствующих зерновых бункеров, а также количества зерна, собираемого уборочным механизмом. Такая схема системы 10 для транспортировки зерна дает возможность изменять скорость потока зерна на каждом транспортировочном устройстве, чтобы сбалансировать перемещение зерна так, что оно эффективно выгружается в зерновозку 12. Например, если уборочная машина 14 в течение некоторого времени отгружает зерно в зерновозку 12, а бункер 18 в основном не заполнен, тогда скорость, при которой транспортировочная система 24 перемещает зерно от уборочной машины 16, может быть увеличена до максимальной для быстрой передачи зерна из зернового бункера 22 в зерновой бункер 18. Если ситуация противоположная, то перемещение зерна с помощью устройства 24 может быть замедлено, чтобы перемещение зерна транспортировочным устройством 20 выравнивало поток собранного зерна, поступающего в бункер 18, и зерна,транспортируемого устройством 24. Настоящее изобретение преимущественно позволяет осуществлять точечную выгрузку путем координации движения множества уборочных машин, которые могут находиться вблизи единственной зерновозки. Настоящее изобретение также позволяет обеспечить физическую связь между двумя и более-3 016106 комбайнами во время процесса выгрузки, а так как уборка урожая продолжается, изобретение дает возможность одновременно разгружать все комбайны в одну зерновозку. Как говорилось выше, один комбайн может быть ведущим, его комбайнер осуществляет дистанционное управление другими комбайнами - ведомыми. Системы транспортировки зерна могут располагаться по обеим сторонам комбайна, их разгрузка может координироваться в любом направлении, то есть справа и слева. Зерновозка может быть оборудована двусторонней, двунаправленной системой выгрузки, чтобы получать зерно с комбайнов и разгружать его в тягач с транспортным прицепом в конце поля. Разгрузочные устройства зерновых бункеров могут соединяться друг с другом аналогичным способом для обеспечения заполнения множества зерновых бункеров в единой системе посредством увязывания действий множества уборочных машин и множества зерновозок. Также подразумевается, что комбайны могут оборудоваться транспортерами, которые выдвигаются на половину расстояния между уборочными машинами, чтобы реализовать транспортировку зерна с одного транспортера на другой, когда комбайны находятся в состоянии согласованного движения. Очевидно, что транспортировочные устройства 20 и 24 могут выполняться в виде шнеков, ленточных транспортеров, многоуровневых выдвижных конвейеров или иных устройств для транспортировки зерна. Как только уборочные машины оказываются связанными между собой, две или более уборочных машин используются для одновременной точечной выгрузки зерна в зерновозку. Еще одним предполагаемым вариантом осуществления настоящего изобретения является вариант, в котором устройство 24 для транспортировки зерна может располагаться для непосредственной передачи находящегося на нем зерна в устройство 20 для транспортировки зерна, а не в бункер 18. Тогда зерно падает с конца одного транспортера на находящийся под ним транспортер соседней уборочной машины. Данное решение легко понять, если бункер 18 (фиг. 2 и 3) представить как воронку 18, куда поступает зерно с транспортера 24,которое затем проходит к транспортеру 20, располагающемуся под воронкой 18. При таком решении зерно с транспортера 24 не проходит через внутренние устройства уборочной машины 14. Тогда транспортер 20 сможет одновременно передавать зерно, поступающее непосредственно с транспортера 24 и из зернового бункера уборочной машины 14. Одновременная разгрузка двух и более комбайнов обеспечивает непрерывный поток зерна в зерновозку, тем самым быстро и эффективно используя ее возможности. Комбайны всегда движутся строем при разгрузке, они находятся вблизи друг от друга при уборке урожая и связаны между собой в процессе разгрузки. Преимущество заключается в том, что такое решение позволяет водителю зерновозки упростить взаимодействие с одним комбайном и не тратить время и усилия на поиски комбайнов на поле. Органы управления комбайном содержат кнопку отмены действий, позволяющую комбайнеру в случае возникновения проблем принимать управление уборочной машиной на себя, отключаясь от ведущей машины. Органы управления предназначены также для синхронизации действий с ведущим механизмом для эффективной разгрузки зерна и обеспечения контроля за разгрузкой со стороны комбайнера при наличии нерешенных проблем. Учитываются также разные объемы зерновых бункеров, особенно если одна уборочная машина определяется как ведущая, то она может иметь зерновой бункер большей емкости, чтобы вмещать зерно, поступающее с другой уборочной машины. После описания предпочтительного варианта осуществления станет очевидным, что могут быть выполнены различные изменения, не выходящие за рамки объема изобретения, определенного в приложенной формуле изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система перемещения зерна, содержащая зерновозку; множество уборочных машин, включая первую уборочную машину и вторую уборочную машину,при этом первая уборочная машина выполнена с возможностью выгрузки зерна в зерновозку, получения зерна от второй уборочной машины и координации транспортировки зерна. 2. Система по п.1, в которой каждая уборочная машина содержит устройство для транспортировки зерна, имеющее дальний конец; зерновой бункер, имеющий открытую область; устройство определения положения, выполненное с возможностью определения положения дальнего конца и/или открытой области; и систему позиционирования, выполненную с возможностью расположения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера первой уборочной машины. 3. Система по п.2, в которой первая уборочная машина содержит опору, расположенную вблизи зернового бункера и выполненную с возможностью размещения и поддержания устройства для транспортировки зерна второй уборочной машины. 4. Система по п.3, в которой первая и/или вторая уборочная машина содержит по меньшей мере один датчик, выполненный с возможностью определения соответствующего расположения дальнего-4 016106 конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера первой уборочной машины для предотвращения рассыпания зерна. 5. Система по п.4, в которой по меньшей мере один датчик выполнен с возможностью передачи информации второй уборочной машине, когда дальний конец устройства для транспортировки зерна второй уборочной машины не расположен соответствующим образом, тем самым приостанавливая работу устройства для транспортировки зерна второй уборочной машины самой второй уборочной машиной. 6. Система по п.2, в которой первая и/или вторая уборочная машина содержит по меньшей мере один датчик, выполненный с возможностью бесконтактного определения соответствующего положения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера первой уборочной машины для предотвращения рассыпания зерна. 7. Система по п.1, в которой каждая из первой и второй уборочных машин содержит устройство для транспортировки зерна, при этом устройство для транспортировки зерна первой уборочной машины выполнено с возможностью получения зерна от устройства для транспортировки зерна второй уборочной машины. 8. Уборочная машина, содержащая контроллер; устройство для транспортировки зерна, имеющее дальний конец; зерновой бункер, имеющий открытую область, при этом контроллер выполнен с возможностью определения положения дальнего конца устройства для транспортировки зерна относительно открытой области зернового бункера другой уборочной машины и координации транспортировки зерна. 9. Машина по п.8, дополнительно содержащая опору, расположенную вблизи зернового бункера и выполненную с возможностью размещения и поддержания устройства для транспортировки зерна еще одной уборочной машины. 10. Машина по п.9, дополнительно содержащая по меньшей мере один датчик, выполненный с возможностью определения соответствующего положения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера другой уборочной машины для предотвращения рассыпания зерна. 11. Машина по п.10, в которой по меньшей мере один датчик выполнен с возможностью передачи информации на контроллер, когда дальний конец устройства для транспортировки зерна не расположен соответствующим образом, при этом контроллер выполнен с возможностью приостановки работы устройства для транспортировки зерна. 12. Машина по п.8, дополнительно содержащая один датчик, выполненный с возможностью бесконтактного определения соответствующего положения дальнего конца устройства для транспортировки зерна второй уборочной машины относительно зернового бункера другой уборочной машины. 13. Машина по п.12, в которой по меньшей мере один датчик выполнен с возможностью передачи информации второй уборочной машине, когда дальний конец устройства для транспортировки не расположен соответствующим образом, при этом контроллер выполнен с возможностью приостановки работы устройства для транспортировки зерна в зависимости от указанной информации. 14. Способ выгрузки зерна, включающий этап перемещения зерна в первую уборочную машину из второй уборочной машины при перемещении и первой уборочной машины, и второй уборочной машины по полю, при этом первая уборочная машина выполнена с возможностью координации транспортировки зерна. 15. Способ по п.14, дополнительно включающий этап перемещения зерна из первой уборочной машины в движущуюся зерновозку одновременно с этапом перемещения зерна в первую уборочную машину. 16. Способ по п.15, дополнительно включающий этап координирования выпуска зерна из устройства для транспортировки зерна второй уборочной машины с открытой областью зернового бункера первой уборочной машины. 17. Способ по п.16, в котором этап координирования включает этап передачи информации о положении дальнего конца устройства для транспортировки зерна и/или зернового бункера между первой уборочной машиной и второй уборочной машиной. 18. Способ по п.17, в котором этап координирования включает этап передачи команды от первой уборочной машины ко второй уборочной машине для остановки транспортировки зерна из второй уборочной машины. 19. Способ по п.18, в котором устройство для транспортировки зерна находится в опоре, соединенной с первой уборочной машиной. 20. Способ по п.15, дополнительно включающий этап согласования перемещения зерновозки, первой уборочной машины и второй уборочной машины друг с другом при выполнении обоих этапов перемещения. 21. Способ по п.20, в котором этап согласования включает назначение зерновозки, первой уборочной машины или второй уборочной машины ведущим звеном, а остальных механизмов - ведомыми звеньями, при этом перемещение по полю всех звеньев контролируется ведущим звеном.
МПК / Метки
МПК: A01D 91/04, A01D 61/00, A01D 41/02
Метки: система, разгрузки, машин, уборочных, множества
Код ссылки
<a href="https://eas.patents.su/8-16106-sistema-razgruzki-mnozhestva-uborochnyh-mashin.html" rel="bookmark" title="База патентов Евразийского Союза">Система разгрузки множества уборочных машин</a>
Уборочный агрегат, в частности уборочная приставка, для сельскохозяйственных уборочных машин для приема и продвижения колосовых
Номер патента: 9614
Опубликовано: 28.02.2008
Авторы: Риккерт Клеменс, Шульце Хоккенбек Лео, Хюнинг Мартин, Вайтенберг Клеменс
МПК: A01D 41/14
Метки: продвижения, приема, частности, уборочных, колосовых, приставка, сельскохозяйственных, уборочная, агрегат, уборочный, машин
Формула / Реферат:
1. Уборочный агрегат, в частности уборочная приставка (14) для сельскохозяйственных уборочных машин (10) для приема и продвижения колосовых, например кукурузы, который выполнен с возможностью перемещения в процессе уборки в направлении движения по полю и который содержит среднюю секцию (36), а также первую боковую секцию (32) и вторую боковую секцию (34), которые установлены на соответствующей стороне средней секции (36) с возможностью поворота...
Система разгрузки для коксового барабана
Номер патента: 5749
Опубликовано: 30.06.2005
Автор: Молсбери Аллен С.
МПК: C10B 33/00, F27B 1/21
Метки: барабана, система, разгрузки, коксового
Формула / Реферат:
1. Система разгрузки для коксового барабана (2) для коксования углеводородных материалов, содержащая клапан (6), расположенный в непосредственной близости от дна барабана (2), трубопровод (8) для подачи пара, соединенный с клапаном и выполненный с возможностью подачи пара к клапану (6) под более высоким давлением, чем давление выше по течению относительно клапана (6), так что если клапан (6) дает утечку, то подача пара позволяет клапану (6)...
Система и способ использования множества приложений
Номер патента: 6814
Опубликовано: 28.04.2006
Автор: Хон Конг Лум
МПК: Ратакришнан Чандрасекар С/о, G06F 9/445, G09G 5/373...
Метки: система, приложений, использования, множества, способ
Формула / Реферат:
1. Система программного обеспечения, позволяющая серверу исполнять приложение для вывода на дисплей машины пользователя, причем указанная система программного обеспечения на машине пользователя выполнена в архитектуре одного операционного уровня. 2. Система программного обеспечения по п.1, отличающаяся тем, что включает в себя платформу для работы на машине пользователя, причем эта платформа включает в себя машину платформы, действующую как...
Система одновременного забивания гвоздей в плоские поверхности, предназначенная для машин для забивания гвоздей с последующим расклепыванием их концов
Номер патента: 5881
Опубликовано: 30.06.2005
Автор: Яннуччи Марко
МПК: B27F 7/02, B65H 75/50, B27M 3/00...
Метки: предназначенная, расклепыванием, плоские, концов, одновременного, система, машин, гвоздей, поверхности, забивания, последующим
Формула / Реферат:
1. Система одновременного забивания гвоздей с последующим расклепыванием их концов в плоские поверхности для машин для забивания гвоздей, содержащая механизмы забивания гвоздей и осадочные механизмы, отличающаяся тем, что указанные механизмы являются узлами, расположенными звездообразно и размещенными по некоторому числу радиусов так, что узел механизмов каждого радиуса должен забивать только те гвозди, которые должны быть забиты в сектор круга...
Система и способ совместной визуализации множества атрибутов в реальном масштабе времени
Номер патента: 9653
Опубликовано: 28.02.2008
Автор: Чутер Кристофер Джон
МПК: G06T 11/20, G06T 15/50, G09G 5/00...
Метки: система, времени, реальном, совместной, визуализации, масштабе, способ, множества, атрибутов
Формула / Реферат:
1. Способ выделения изображения одного или более атрибутов, представляющих свойство объекта, который содержит выбор первого и второго атрибутов из множества атрибутов, причем каждый первый и второй атрибуты имеет свои собственные вершины; создание карты нормалей при использовании по меньшей мере одного из первого и второго атрибутов, причем карта нормалей имеет свои собственные вершины; преобразование вершин карты нормалей и вершин по меньшей...
Предыдущий патент: Система мобильной связи, устройство базовой станции и устройство мобильной станции
Следующий патент: Установка и способ сухого вывода/охлаждения тяжелых зол и регулирования сгорания остатков с высоким содержанием несгоревшего материала
Случайный патент: Способ сооружения выровненной лестницы