Способ изменения тягового усилия подъемных механизмов и устройство для его осуществления (его варианты)
Формула / Реферат
1. Способ изменения тягового усилия подъемных механизмов с гибким рабочим органом подъема, осуществляющим передачу усилия, заключающегося в создании тягового усилия, необходимого для равномерного подъема и опускания груза, отличающийся тем, что изменение усилия натяжения гибкого подъемного органа, определяющего тяговое усилие, обеспечивается изменением геометрии ветвей полиспаста.
2. Способ по п.1, отличающийся тем, что первоначальная геометрия ветвей гибкого подъемного органа, определяющая начальные и конечные значения усилий натяжения ветвей полиспаста, а следовательно, и тяговых усилий, устанавливается перед началом процесса равномерного подъема и опускания груза.
3. Механизм подъема для изменения тягового усилия, состоящий из подвижного блока, к которому подвешен груз, неподвижных блоков, ветвей гибкого подъемного органа, отличающийся тем, что содержит устройство, имеющее деформируемый рабочий орган в виде ромба и направляющую систему, с элементом фиксации и перемещения, определяющих первоначальную геометрию ветвей полиспаста, которое установлено между двумя неподвижными и подвижным блоком таким образом, что стороны ромба, выполненные из жестких материалов, шарнирно соединены, а именно на оси подвижного блока, к которому подвешен груз, на осях блоков, взаимодействующих с ветвями полиспаста, на оси неподвижного кронштейна.
4. Механизм по п.3, отличающий тем, что штанги рабочего органа устройства, шарнирно соединенные на оси подвижного блока, к которому подвешен груз, заменены гибким рабочим органом подъема.
5. Механизм по п.3, отличающийся тем, что в рабочем органе устройства блоки, взаимодействующие с ветвями полиспаста, жестко соединены между собой, а неподвижный кронштейн становится подвижным.

Текст
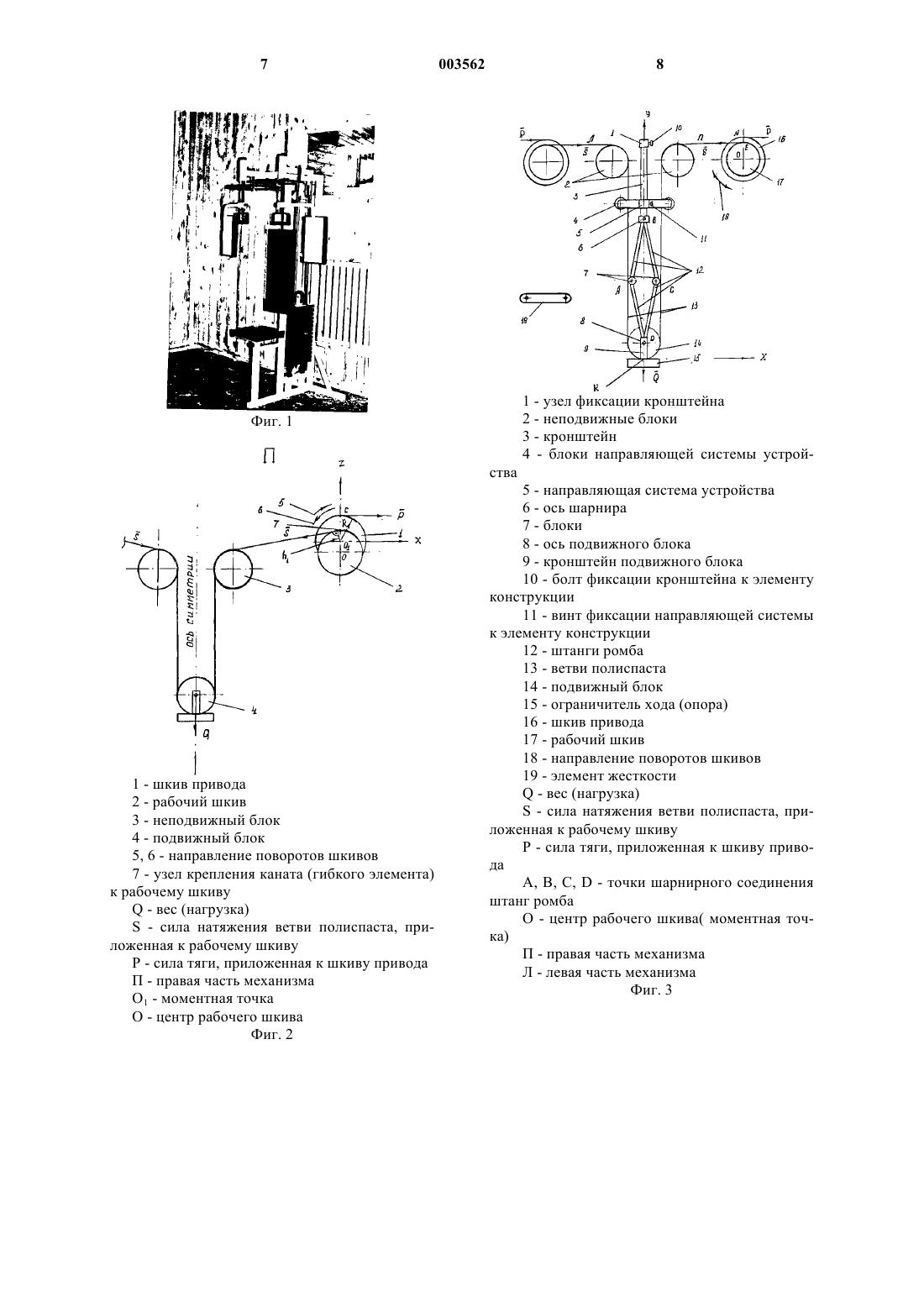
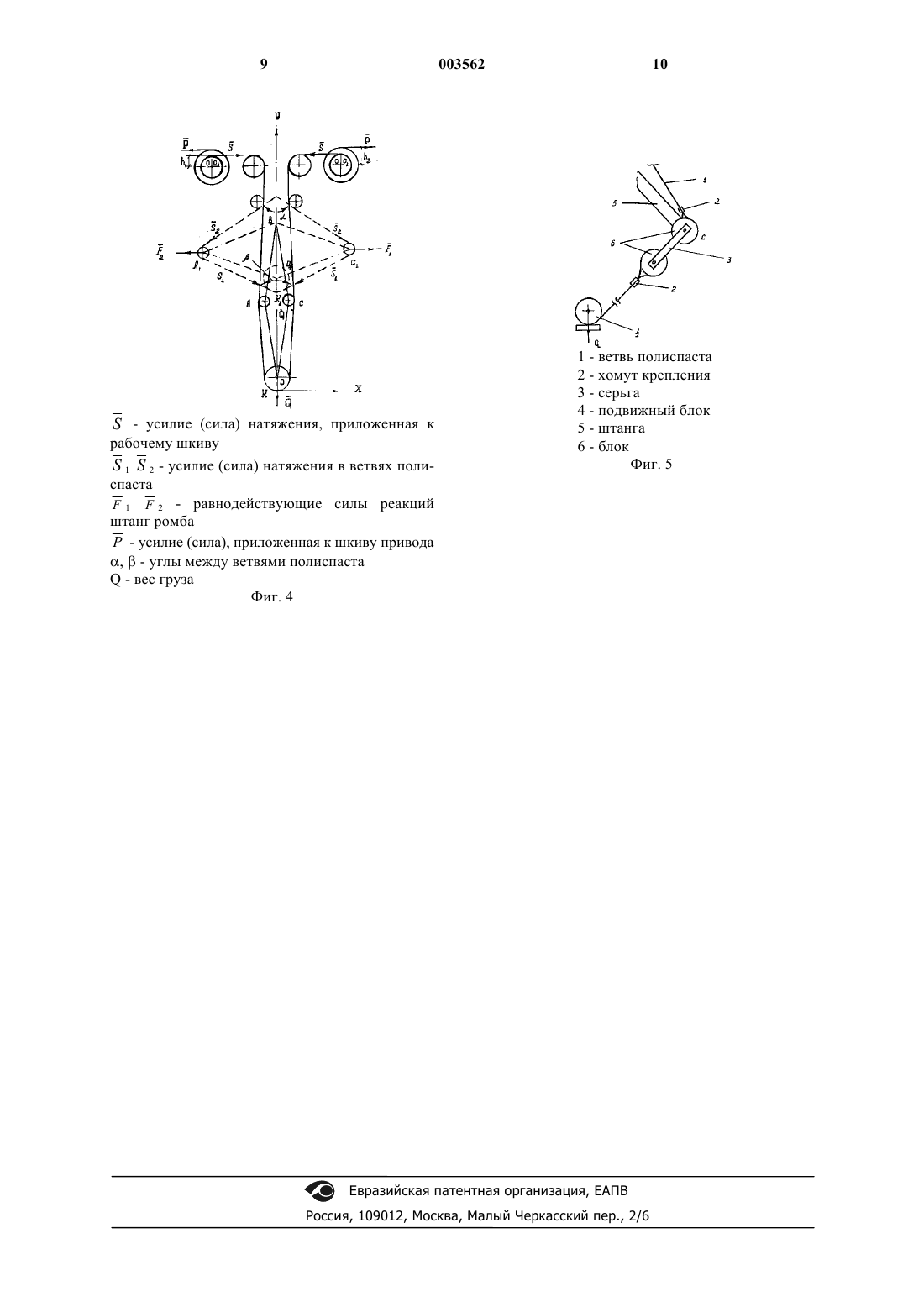
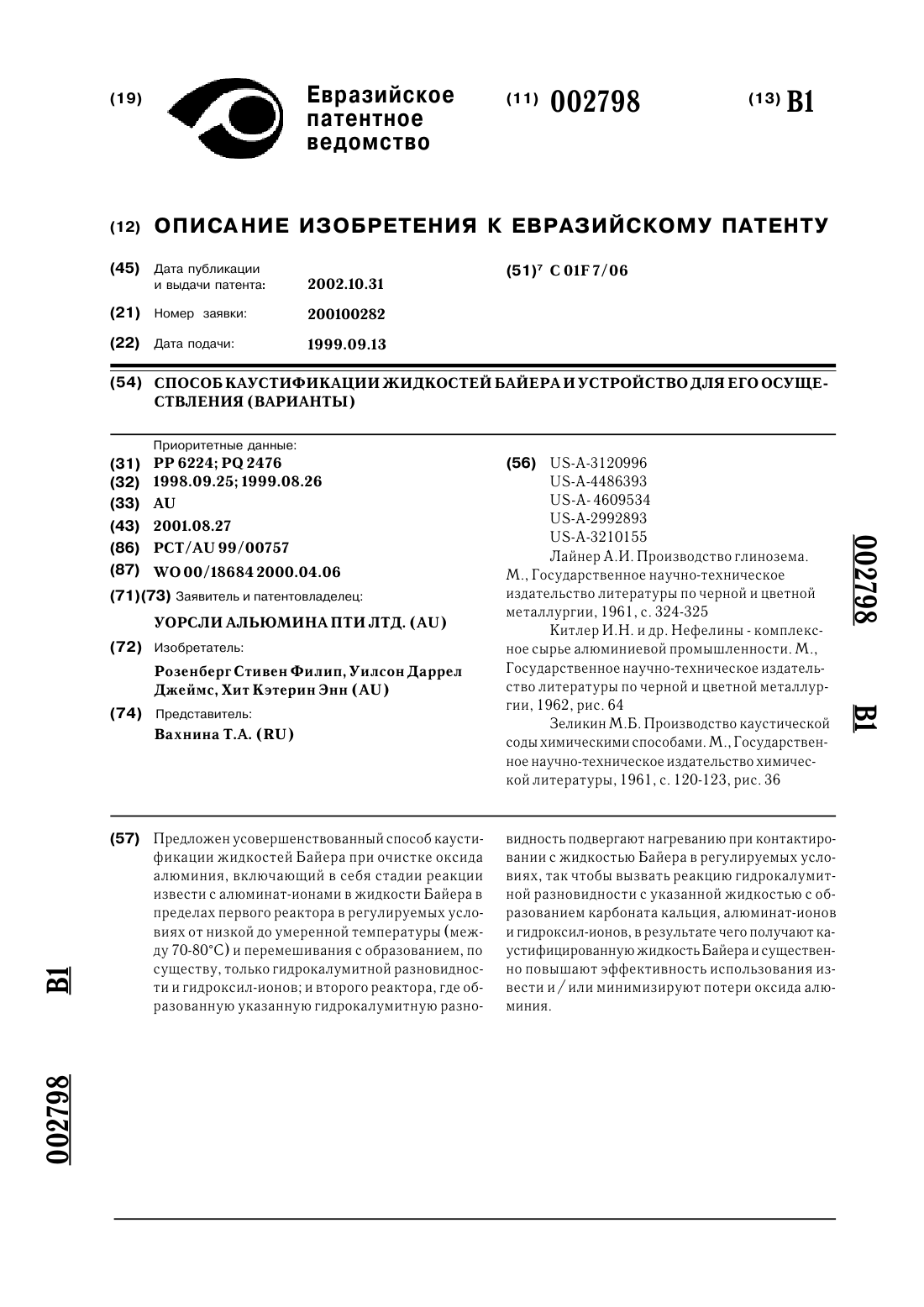
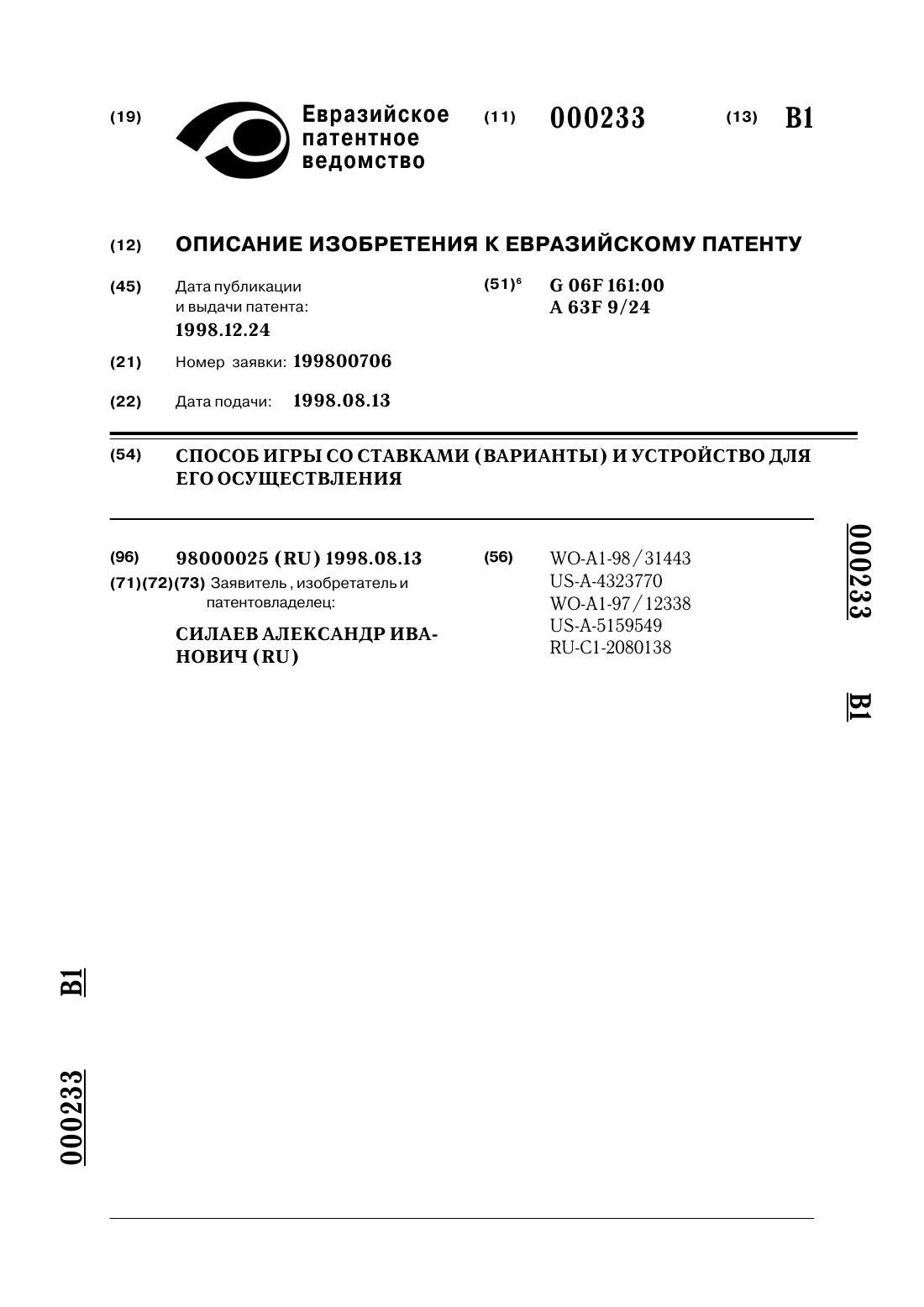
1 Настоящее изобретение относится к способам изменения тягового усилия подъемных устройств. Может быть применено в подъемных механизмах, где требуется получение тягового усилия, меняющегося по величине. Подъемные механизмы этого вида могут различаться по функциональному назначению, величине и характеру изменения тяговых усилий, получаемых в процессе подъема и опускания груза. Из конкретных областей применения изобретения можно выделить спортивное оборудование(спортивные тренажеры). Известны способы изменения тягового усилия подъемных механизмов методом изменения веса поднимаемого груза, изменения количества подвижных и неподвижных блоков полиспаста, изменения момента силы относительно оси в силовой передаче подъемного механизма [1]. Наиболее близким техническим решением является способ, в котором составляющие, слагаемые силы, получены по принципу работы механизма [2]. Общий вид устройства для осуществления способа изменения тягового усилия подъемного механизма, являющегося прототипом, приведен на фиг. 1, а схематичное действие способа рассматривается на фиг. 2. К оси подвижного блока 4 приложены груз или сила Q . Подъем и опускание груза осуществляются с помощью двух приводов. Механизм имеет два конструктивно одинаковых привода: правый (П) и левый (Л). Привод - это вал, на который насажены два шкива различного диаметра: рабочий шкив 2 и шкив привода 1. Рассмотрим работу правого привода. При повороте шкива привода 1 поворачивается рабочий шкив 2. Осью вращения шкивов является ось вала, проходящая через центр шкива привода и точку О 1 рабочего шкива. Точка O1 смещена относительно центра рабочего шкива точки О. Шкивы лежат в параллельных плоскостях, а ось вала перпендикулярна этим плоскостям. Под действием силы P шкив привода поворачивается на 180, канат наматывается на рабочий шкив (1 цикл), шкив привода поворачивается в обратном направлении на 180, канат сматывается с рабочего шкива (2 цикл). Работа левого привода механизма аналогична правому. Шкивы приводов начинают вращение одновременно и поворачиваются с одинаковой угловой скоростью. Если правый шкив привода в цикле 1 поворачивается по часовой стрелке на 180, то левый шкив привода в цикле 1 в это время поворачивается на 180 против часовой стрелки. Моментом силы относительно оси является алгебраический момент проекции этой силы на плоскость, перпендикулярную к оси, относительно точки пересечения оси с этой плоскостью. Из определения момента силы относительно оси следует, что алгебраический момент силы относительно точки O1 можно считать моментом силы относительно оси Y, проходящей 2 через эту точку. Считаем, что рабочий шкив лежит в плоскости, образованной осями координат Х и Z. За начало координат принимается точка О 1, тогда ось Y будет направлена по оси вала. Точка O1 является моментной точкой, относительно которой рассматривается действие сил. Приведенный математический анализ работы механизмов не учитывает сопротивления в блоках (сопротивление гибких подъемных органов изгибу и сопротивление в подшипниках).S - сила натяжения ветви полиспаста,приложена к рабочему шкиву.S, R - постоянные величины. Следовательно, изменение Р происходит при изменении h1. При повороте на 180 рабочего шкива плечо силы S увеличивается (1 цикл). При повороте на 180 в обратном направлении плечо силы S уменьшается (2 цикл). Недостаток известного способа заключается в том, что невозможно изменять параметры минимальных первоначальных (начало подъема груза) и максимальных конечных (конец подъема груза) нагрузок, силы тяги при постоянном весе поднимаемого груза. Целью изобретения является повышение эффективности использования подъемного механизма, снижение металлоемкости и трудозатрат по изготовлению. Поставленная цель осуществляется путем реализации способа изменения тягового усилия подъемного механизма, в частности в спортивном тренажере для развития грудных мышц. Заявляемое изобретение должно решить поставленную задачу по изменению тягового усилия подъемного механизма способом изменения геометрии ветвей гибкого подъемного органа, ветвей полиспаста, методом деформации и перемещения направляющей системы устройства. Под изменением геометрии ветвей поли 3 спаста следует понимать изменение геометрической фигуры, образованной ветвями полиспаста. Сущность изобретения заключается в изменении геометрии ветвей полиспаста в процессе подъема и опускания груза с помощью устройства, позволяющего изменить конструкцию привода механизма, для чего заявляемое устройство устанавливается между двумя неподвижными блоками 2 и подвижным блоком 14 известного подъемного механизма таким образом, что рабочий орган устройства шарнирно закрепляется на оси подвижного блока 14. При этом диаметры рабочих шкивов уменьшаются, а ось вала проходит через центры шкивов. Способ и работа устройства схематически показаны на фиг. 3. Изменение модуля силы Р достигается следующим образом. При подъеме и опускании груза устройство, рабочим органом которого является конструкция, имеющая геометрическую форму ромба, изменяет свою геометрическую форму, т.к. стороны ромба шарнирно соединены между собой. Кронштейн 3 является неподвижным шарниром. Блоки 7, упираясь в ветви полиспаста 13, раздвигают их. Образовавшиеся углы между ветвями полиспаста изменяют натяжение ветвей каната при подъеме груза, что и приводит к изменению модуля силы тяги Р. Материал, из которого выполнено устройство, - металлопрокат различного профиля. Конструктивно устройство - это система, состоящая из блоков, жестких и гибких тяг и других деталей. Полиспаст обеспечивает взаимосвязь и работу устройства. Взаимное расположение блоков, жестких звеньев функционально удовлетворяет поставленной задаче и получению технического результата. Сущность изобретения поясняется чертежами, где на фиг. 2 показан прототип подъемного механизма; на фиг. 3 представлен подъемный механизм с предлагаемым устройством; на фиг. 4 рассматривается условие равновесия сил для всей системы тел подъемного механизма с предлагаемым устройством; на фиг. 5 представлен вариант устройства (модификация). Рабочий орган устройства - это конструкция, имеющая геометрическую форму ромба(фиг. 3). Штанги 12 (стороны ромба) соединены между собой с помощью шарниров А, В, С, Д. В шарнирах А и С имеются блоки. Схема полиспаста - рабочий шкив левый 17, неподвижный блок 2, блок направляющей системы 4, блок 7,блок 14, блок 7, блок 4, рабочий шкив правый 17. Кронштейн 3 фиксируется на элементе конструкции болтом фиксации 10. Направляющая система фиксируется винтом 11 на элементе конструкции. На кронштейне 9 установлен подвижный блок 14 и шарнир штанг ромба, которые опираются на ограничитель хода 15. Осью вращения шкивов является ось вала. Ось вала проходит через центры шкивов перпендикуляр 003562 4 но плоскостям, в которых лежат шкивы. Правый и левый шкивы приводов под действием силы Р начинают вращение одновременно и поворачиваются с одинаковой угловой скоростью на 180, причем правый шкив поворачивается по часовой стрелке - цикл 1, а левый против часовой стрелки - цикл 1. От шкивов привода вращение передается рабочим шкивам, происходит навивка гибкого элемента (канат) на рабочие шкивы, и груз поднимается. Из приведенной схемы работы устройства(фиг. 4) определим характер изменения силы в ветвях каната полиспаста. Описание конструкции устройства приведено для статического состояния. Рассмотрим начало и конец цикла 1. Начало цикла 1. Груз находится на ограничителе хода(опоре), силы натяжения в ветвях полиспаста равны нулю. При подъеме груза в ветвях полиспаста появляются усилия. Устройство (ромб) изменяет свою геометрическую форму, углы между ветвями полиспаста изменяются. Конец цикла 1. Груз поднят на максимальную высоту,точки А 1, К 1, С 1. За начало координат принимается точка К. Теоретически можно принять, что точки А 1, К 1, С 1 могут находиться на одной прямой, хотя на самом деле точка K1 ниже отрезка прямой, соединяющей точки А 1 и С 1 (фиг. 4). Точка К принята за начало координат, ось Х - параллельно диагонали АС ромба, ось Y направлена по диагонали BD ромба. Определим характер изменения усилий натяжения гибкого подъемного органа (каната). Из условия равновесия, где ХК - сумма проекций всех сил на ось X.YК - сумма проекций всех сил на ось Y.S 1, S 2, S - силы натяжения ветвей полиспаста.F 1, F 2 - силы реакций штанг ромба. 5 Конструкцией устройства предусмотрено,что Cos/2 и Соs/2 уменьшаются при подъеме груза (1 цикл) и увеличиваются при опускании груза (2 цикл). Отсюда видно, что при подъеме груза до определенной максимальной высоты для данного устройства происходит изменение величины силы S от минимального до максимального значения (1 цикл). Цикл 2 - происходит изменение величины силы S от максимального значения до минимального, что приводит к изменению величены силы тяги Р, приложенной к шкиву привода. Устройство позволяет изменять параметры силы Р по прямо пропорциональной зависимости - уменьшать или увеличивать начальные и конечные моменты силы тяги Р относительно оси вала, а следовательно, и величины силы Р,расширить количество пределов минимальных первоначальных (начало подъема груза) и максимальных конечных нагрузок. Перемещение направляющей системы 5 устройства приводит к изменению начальных и конечных значений углa(фиг. 4), а следовательно, и величины силы S и Р, что видно из формул (2) и (3). Возможен способ работы механизма по типу простейшей тали, для чего достаточно в узел фиксации 3 кронштейна 1 устройства ввести элемент подвижности и обеспечить условие, при котором ромб не будет изменять заданной геометрии, тогда усилия в ветвях полиспаста не меняются, т.е. геометрия ветвей полиспаста остается постоянной. Элемент 19, обеспечивающий жесткость конструкции ромба, выполнен из стальных полос, соединяющих шарниры точек А и С (фиг. 3). Устройство 2 (вариант). В точках А и С произвести шарнирное крепление каната (фиг. 5), тогда отпадает необходимость в штангах ромба по стороне AD, DC. Устройство работает по принципу вышеописанного, следовательно, имеются возможности по модификации устройства. Перечень устройств аналогичного назначения можно продолжить,они могут быть механическими, гидравлическими, пневматическими, но главным назначением их остается изменение геометрии полиспаста. Преимущество предлагаемого способа изменения тягового усилия заключается в следующем: 1. Снижается вес подъемного механизма. 2. Упрощается конструкция силового привода подъемного механизма, диаметры рабочих шкивов уменьшились и не требуют больших затрат по изготовлению. 3. Уменьшается вес поднимаемого груза для получения требуемых тяговых усилий. 4. Способ изменения тяговых усилий изменением геометрии ветвей полиспаста может 6 быть применен во многих подъемных механизмах простейшего типа, различных по функциональному назначению, где требуется получение тяговых усилий, которые могут изменяться в процессе подъема и опускания груза или оставаться постоянными. Источники информации 1. Каталог тренажеров для атлетической подготовки КАП-2 "Ладога". Издательство "Советский спорт", 1989 г. (аналоги). 2. В.Ф. Регулян. Стать сильнее сильного. ИПП "Уральский рабочий". 1993 г., с. 39, фиг. 13. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ изменения тягового усилия подъемных механизмов с гибким рабочим органом подъема, осуществляющим передачу усилия, заключающегося в создании тягового усилия, необходимого для равномерного подъема и опускания груза, отличающийся тем, что изменение усилия натяжения гибкого подъемного органа, определяющего тяговое усилие, обеспечивается изменением геометрии ветвей полиспаста. 2. Способ по п.1, отличающийся тем, что первоначальная геометрия ветвей гибкого подъемного органа, определяющая начальные и конечные значения усилий натяжения ветвей полиспаста, а следовательно, и тяговых усилий,устанавливается перед началом процесса равномерного подъема и опускания груза. 3. Механизм подъема для изменения тягового усилия, состоящий из подвижного блока, к которому подвешен груз, неподвижных блоков,ветвей гибкого подъемного органа, отличающийся тем, что содержит устройство, имеющее деформируемый рабочий орган в виде ромба и направляющую систему, с элементом фиксации и перемещения, определяющих первоначальную геометрию ветвей полиспаста, которое установлено между двумя неподвижными и подвижным блоком таким образом, что стороны ромба, выполненные из жестких материалов, шарнирно соединены, а именно на оси подвижного блока,к которому подвешен груз, на осях блоков,взаимодействующих с ветвями полиспаста, на оси неподвижного кронштейна. 4. Механизм по п.3, отличающий тем, что штанги рабочего органа устройства, шарнирно соединенные на оси подвижного блока, к которому подвешен груз, заменены гибким рабочим органом подъема. 5. Механизм по п.3, отличающийся тем,что в рабочем органе устройства блоки, взаимодействующие с ветвями полиспаста, жестко соединены между собой, а неподвижный кронштейн становится подвижным. 1 - узел фиксации кронштейна 2 - неподвижные блоки 3 - кронштейн 4 - блоки направляющей системы устрой Фиг. 1 ства 1 - шкив привода 2 - рабочий шкив 3 - неподвижный блок 4 - подвижный блок 5, 6 - направление поворотов шкивов 7 - узел крепления каната (гибкого элемента) к рабочему шкивуS - сила натяжения ветви полиспаста, приложенная к рабочему шкиву Р - сила тяги, приложенная к шкиву привода П - правая часть механизма О 1 - моментная точка О - центр рабочего шкива Фиг. 2 5 - направляющая система устройства 6 - ось шарнира 7 - блоки 8 - ось подвижного блока 9 - кронштейн подвижного блока 10 - болт фиксации кронштейна к элементу конструкции 11 - винт фиксации направляющей системы к элементу конструкции 12 - штанги ромба 13 - ветви полиспаста 14 - подвижный блок 15 - ограничитель хода (опора) 16 - шкив привода 17 - рабочий шкив 18 - направление поворотов шкивов 19 - элемент жесткостиS - сила натяжения ветви полиспаста, приложенная к рабочему шкиву Р - сила тяги, приложенная к шкиву приводаA, B, C, D - точки шарнирного соединения штанг ромба О - центр рабочего шкива( моментная точка) П - правая часть механизма Л - левая часть механизма Фиг. 3F 1 F 2 - равнодействующие силы реакций штанг ромба,- углы между ветвями полиспаста
МПК / Метки
МПК: B66D 3/04, A63B 21/06
Метки: устройство, тягового, способ, его, осуществления, варианты, усилия, изменения, подъемных, механизмов
Код ссылки
<a href="https://eas.patents.su/6-3562-sposob-izmeneniya-tyagovogo-usiliya-podemnyh-mehanizmov-i-ustrojjstvo-dlya-ego-osushhestvleniya-ego-varianty.html" rel="bookmark" title="База патентов Евразийского Союза">Способ изменения тягового усилия подъемных механизмов и устройство для его осуществления (его варианты)</a>
Способ каустификации жидкостей байера и устройство для его осуществления (варианты)
Номер патента: 2798
Опубликовано: 31.10.2002
Авторы: Розенберг Стивен Филип, Хит Кэтерин Энн, Уилсон Даррел Джеймс
МПК: C01F 7/06
Метки: осуществления, способ, каустификации, жидкостей, варианты, устройство, байера
Формула / Реферат:
1. Способ каустификации жидкостей Байера при очистке оксида алюминия, включающий в себя стадии реакции извести с алюминат-ионами в жидкости Байера в регулируемых условиях от низкой до умеренной температуры с образованием, по существу, только гидрокалумитной разновидности и гидроксил-ионов и нагревания указанной гидрокалумитной разновидности в контакте с жидкостью Байера в регулируемых условиях для вызова реакции гидрокалумитной разновидности с...
Способ игры со ставками (варианты) и устройство для его осуществления
Номер патента: 233
Опубликовано: 24.12.1998
Автор: Силаев Александр Иванович
МПК: A63F 9/24
Метки: осуществления, ставками, игры, варианты, способ, устройство
Формула / Реферат:
1. Способ игры со ставками, заключающийся в формировании игрового множества из N>2 информационных элементов путем генерации в компьютерной памяти набора из N неповторяющихся информационных кодов, распространении среди участников игры по каналам связи сигналов, несущих информацию об элементах игрового множества, выборе каждым участником игры в качестве ставки одного из элементов игрового множества, направлении по каналам обратной связи...
Способ полимеризации олефиновых мономеров (варианты), устройство для его осуществления и полимерный продукт
Номер патента: 1029
Опубликовано: 28.08.2000
Авторы: Бергманн Фред, Корхонен Эса, Лескинен Паули, Меннес Вард
МПК: B01J 19/18, C08F 2/01
Метки: устройство, полимеризации, олефиновых, способ, осуществления, варианты, продукт, полимерный, мономеров
Формула / Реферат:
1. Способ полимеризации олефинового мономера и, возможно, другого мономера в присутствии катализатора полимеризации олефина, разбавителя и возможных сокатализатора и доноров, предусматривающий - образование жидкого потока, содержащего названный катализатор, - непрерывную подачу названного жидкого потока в удлиненный полимеризационный реактор (1), имеющий, по меньшей мере, две последовательные камеры (12а), разделенные разделяющими пластинами...
Способ закрытия и лечения раневых поверхностей /варианты/, покрытие /варианты/ и лейкопластырь /варианты/ для его осуществления
Номер патента: 3488
Опубликовано: 26.06.2003
Авторы: Перминов Дмитрий Валерьевич, Николаев Максим Евгеньевич
МПК: A61P 17/02, A61K 9/70, A61L 15/44...
Метки: осуществления, раневых, поверхностей, лечения, варианты, способ, закрытия, лейкопластырь, покрытие
Формула / Реферат:
1. Способ закрытия и лечения раневых поверхностей, заключающийся в том, что на раневой поверхности размещают заживляющее средство, отличающийся тем, что указанное заживляющее средство представляет собой пористый и/или перфорированный слой пчелиного воска, нанесенный на поверхность носителя, либо пчелиный воск, размещенный в порах носителя, либо пчелиный воск в виде пористой и/или перфорированной пленки или предварительно изготовленных гранул. 2....
Способ осуществления направленной кристаллизации расплавленного металла и устройство для его осуществления
Номер патента: 1195
Опубликовано: 25.12.2000
Автор: Хуго Франц
МПК: B22D 27/04
Метки: осуществления, кристаллизации, металла, устройство, способ, расплавленного, направленной
Формула / Реферат:
1. Способ осуществления направленной кристаллизации залитого в литейную форму расплава металла, например никеля, посредством выдвигания литейной формы из нагревательной камеры и погружения литейной формы в служащую охлаждающим расплавом ванну расплавленного металла с более низкой температурой плавления, чем расплав металла в литейной форме, например алюминия, причем для изоляции между нагревательной камерой и литейной формой на охлаждающем...
Предыдущий патент: Комбинированный приводной трубный ключ со встроенным устройством для отсасывания бурового раствора и смазывания резьбы
Следующий патент: Шлем защитный
Случайный патент: Конъюгат кастастерона с пероксидазой хрена в качестве меченого антигена для иммуноферментного определения 24s-метилбрассиностероидов