Устройство для непрерывного гравиметрического дозирования

Формула / Реферат
1. Устройство для непрерывного гравиметрического дозирования и определения массового потока текучих материалов, содержащее дозатор с определением мгновенного массового потока перед местом выгрузки посредством блока управления дозированием, причем управление выгрузкой происходит за счет изменения частоты вращения привода дозатора посредством блока управления двигателем, отличающееся тем, что блок (10) управления дозированием и блок (20) управления двигателем соединены в один узел (G).
2. Устройство по п.1, отличающееся тем, что узел (G) связан с приводом (6) дозатора (4).
3. Устройство по п.1 или 2, отличающееся тем, что привод (6) дозатора (4) содержит устройство регистрации частоты вращения, в частности тахогенератор (6а), для регистрации фактической частоты вращения, причем устройство регистрации частоты вращения соединенo с блоком (10) управления дозированием, или дозатор (4) представляет собой отдельное устройство регистрации частоты вращения, например фрикционное колесо или датчик импульсов.
4. Устройство по пп.1, 2 или 3, отличающееся тем, что узел (G) расположен в распределительном шкафу или внутри дозатора (4).
5. Устройство по одному из пп.1-4, отличающееся тем, что блок (10) управления дозированием содержит по меньшей мере одну интегральную схему, которая регистрирует возникающее при случае отклонение в месте (8) выгрузки или сразу за ним и соответственно корректирует заданное значение блока (10) управления дозированием.
6. Устройство по п.5, отличающееся тем, что в блоке (10) управления дозированием предусмотрен компаратор для изменения положения точки (Р) предварительного управления.
7. Устройство по одному из пп.1-6, отличающееся тем, что блок (20) управления двигателем выполнен в виде частотного преобразователя или тиристорного блока управления.
8. Устройство по одному из пп.1-7, отличающееся тем, что привод (6) выполнен в виде асинхронного, синхронного, векторного или реактивного двигателя.

Текст
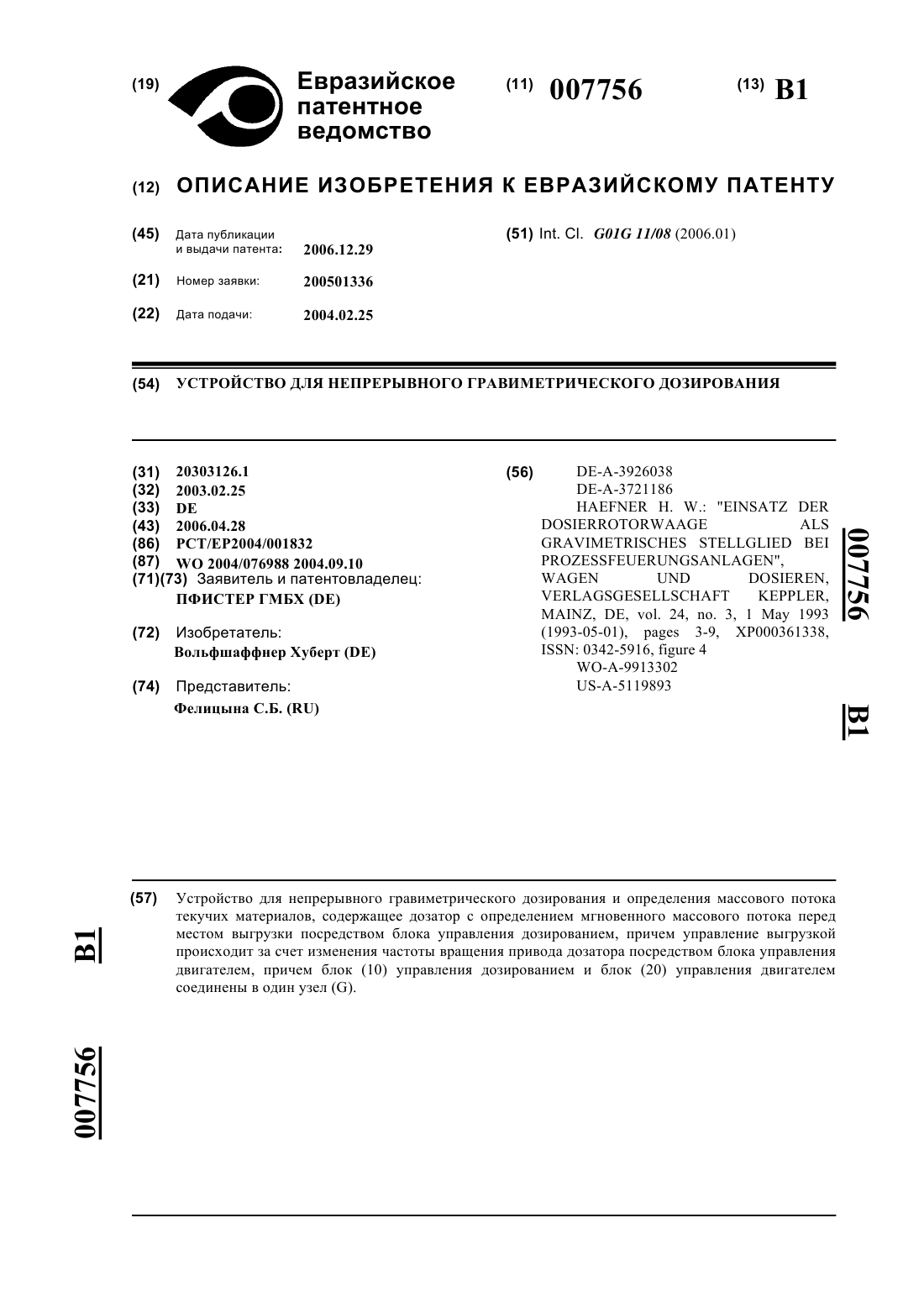
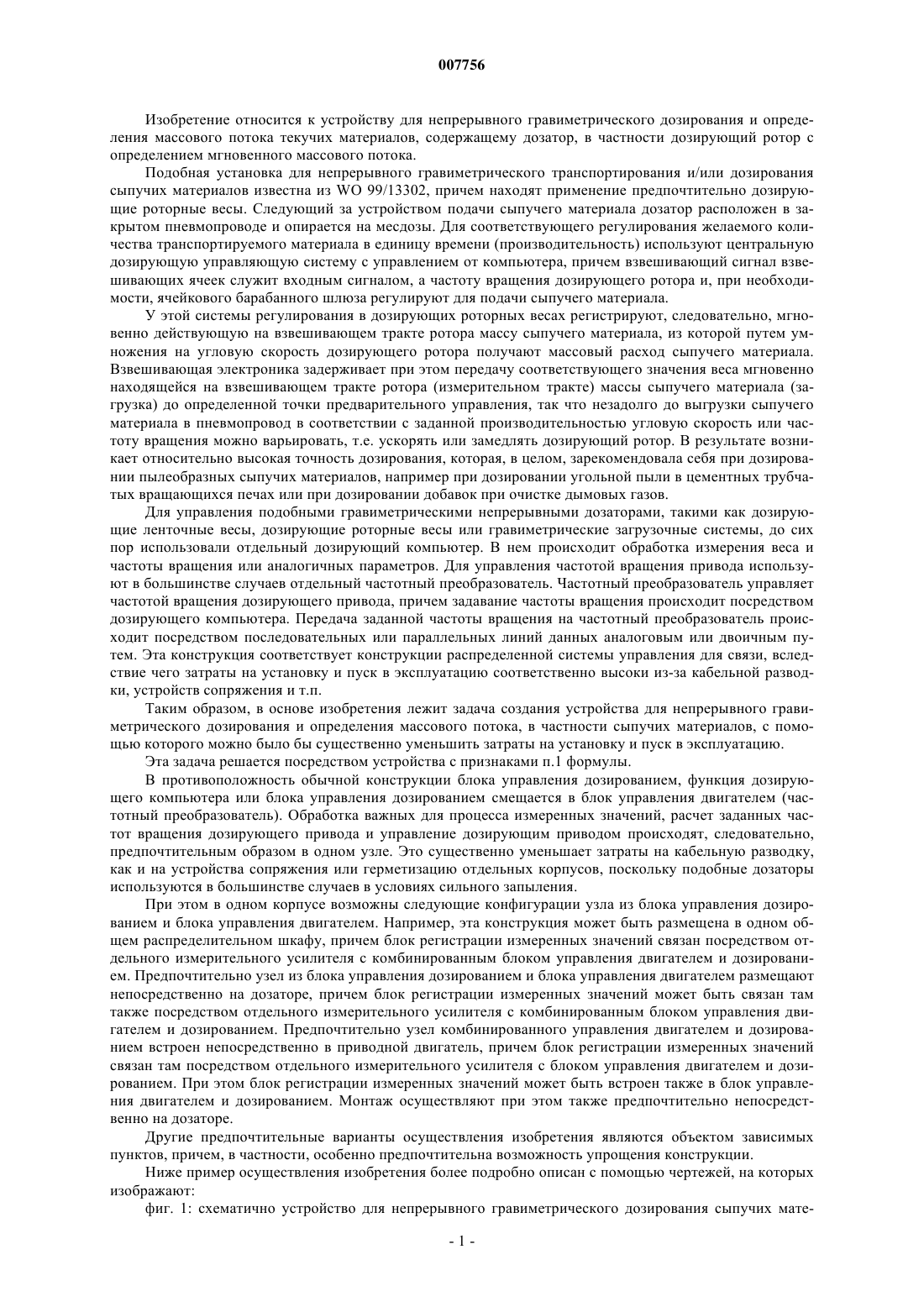
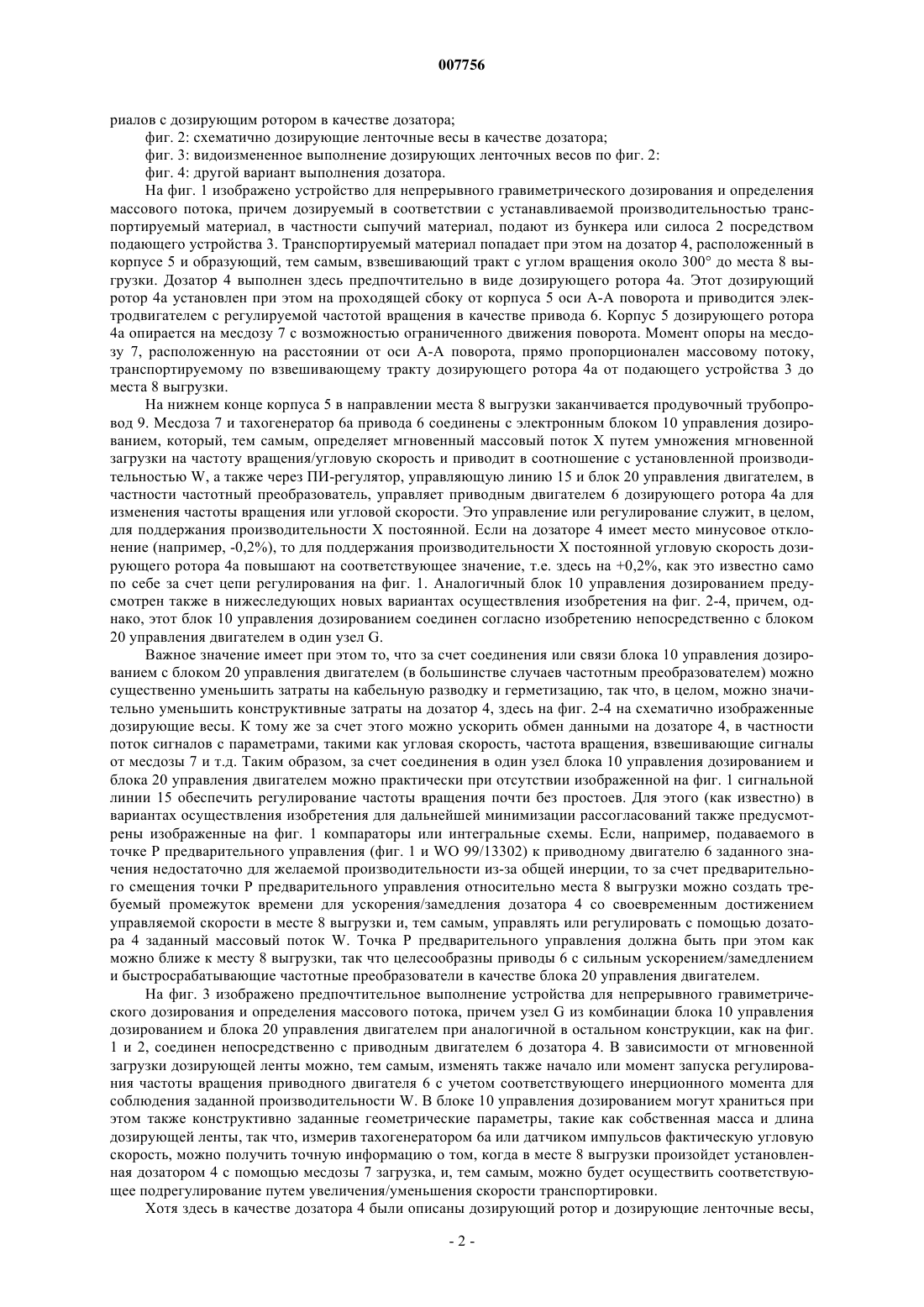
007756 Изобретение относится к устройству для непрерывного гравиметрического дозирования и определения массового потока текучих материалов, содержащему дозатор, в частности дозирующий ротор с определением мгновенного массового потока. Подобная установка для непрерывного гравиметрического транспортирования и/или дозирования сыпучих материалов известна из WO 99/13302, причем находят применение предпочтительно дозирующие роторные весы. Следующий за устройством подачи сыпучего материала дозатор расположен в закрытом пневмопроводе и опирается на месдозы. Для соответствующего регулирования желаемого количества транспортируемого материала в единицу времени (производительность) используют центральную дозирующую управляющую систему с управлением от компьютера, причем взвешивающий сигнал взвешивающих ячеек служит входным сигналом, а частоту вращения дозирующего ротора и, при необходимости, ячейкового барабанного шлюза регулируют для подачи сыпучего материала. У этой системы регулирования в дозирующих роторных весах регистрируют, следовательно, мгновенно действующую на взвешивающем тракте ротора массу сыпучего материала, из которой путем умножения на угловую скорость дозирующего ротора получают массовый расход сыпучего материала. Взвешивающая электроника задерживает при этом передачу соответствующего значения веса мгновенно находящейся на взвешивающем тракте ротора (измерительном тракте) массы сыпучего материала (загрузка) до определенной точки предварительного управления, так что незадолго до выгрузки сыпучего материала в пневмопровод в соответствии с заданной производительностью угловую скорость или частоту вращения можно варьировать, т.е. ускорять или замедлять дозирующий ротор. В результате возникает относительно высокая точность дозирования, которая, в целом, зарекомендовала себя при дозировании пылеобразных сыпучих материалов, например при дозировании угольной пыли в цементных трубчатых вращающихся печах или при дозировании добавок при очистке дымовых газов. Для управления подобными гравиметрическими непрерывными дозаторами, такими как дозирующие ленточные весы, дозирующие роторные весы или гравиметрические загрузочные системы, до сих пор использовали отдельный дозирующий компьютер. В нем происходит обработка измерения веса и частоты вращения или аналогичных параметров. Для управления частотой вращения привода используют в большинстве случаев отдельный частотный преобразователь. Частотный преобразователь управляет частотой вращения дозирующего привода, причем задавание частоты вращения происходит посредством дозирующего компьютера. Передача заданной частоты вращения на частотный преобразователь происходит посредством последовательных или параллельных линий данных аналоговым или двоичным путем. Эта конструкция соответствует конструкции распределенной системы управления для связи, вследствие чего затраты на установку и пуск в эксплуатацию соответственно высоки из-за кабельной разводки, устройств сопряжения и т.п. Таким образом, в основе изобретения лежит задача создания устройства для непрерывного гравиметрического дозирования и определения массового потока, в частности сыпучих материалов, с помощью которого можно было бы существенно уменьшить затраты на установку и пуск в эксплуатацию. Эта задача решается посредством устройства с признаками п.1 формулы. В противоположность обычной конструкции блока управления дозированием, функция дозирующего компьютера или блока управления дозированием смещается в блок управления двигателем (частотный преобразователь). Обработка важных для процесса измеренных значений, расчет заданных частот вращения дозирующего привода и управление дозирующим приводом происходят, следовательно,предпочтительным образом в одном узле. Это существенно уменьшает затраты на кабельную разводку,как и на устройства сопряжения или герметизацию отдельных корпусов, поскольку подобные дозаторы используются в большинстве случаев в условиях сильного запыления. При этом в одном корпусе возможны следующие конфигурации узла из блока управления дозированием и блока управления двигателем. Например, эта конструкция может быть размещена в одном общем распределительном шкафу, причем блок регистрации измеренных значений связан посредством отдельного измерительного усилителя с комбинированным блоком управления двигателем и дозированием. Предпочтительно узел из блока управления дозированием и блока управления двигателем размещают непосредственно на дозаторе, причем блок регистрации измеренных значений может быть связан там также посредством отдельного измерительного усилителя с комбинированным блоком управления двигателем и дозированием. Предпочтительно узел комбинированного управления двигателем и дозированием встроен непосредственно в приводной двигатель, причем блок регистрации измеренных значений связан там посредством отдельного измерительного усилителя с блоком управления двигателем и дозированием. При этом блок регистрации измеренных значений может быть встроен также в блок управления двигателем и дозированием. Монтаж осуществляют при этом также предпочтительно непосредственно на дозаторе. Другие предпочтительные варианты осуществления изобретения являются объектом зависимых пунктов, причем, в частности, особенно предпочтительна возможность упрощения конструкции. Ниже пример осуществления изобретения более подробно описан с помощью чертежей, на которых изображают: фиг. 1: схематично устройство для непрерывного гравиметрического дозирования сыпучих мате-1 007756 риалов с дозирующим ротором в качестве дозатора; фиг. 2: схематично дозирующие ленточные весы в качестве дозатора; фиг. 3: видоизмененное выполнение дозирующих ленточных весов по фиг. 2: фиг. 4: другой вариант выполнения дозатора. На фиг. 1 изображено устройство для непрерывного гравиметрического дозирования и определения массового потока, причем дозируемый в соответствии с устанавливаемой производительностью транспортируемый материал, в частности сыпучий материал, подают из бункера или силоса 2 посредством подающего устройства 3. Транспортируемый материал попадает при этом на дозатор 4, расположенный в корпусе 5 и образующий, тем самым, взвешивающий тракт с углом вращения около 300 до места 8 выгрузки. Дозатор 4 выполнен здесь предпочтительно в виде дозирующего ротора 4 а. Этот дозирующий ротор 4 а установлен при этом на проходящей сбоку от корпуса 5 оси А-А поворота и приводится электродвигателем с регулируемой частотой вращения в качестве привода 6. Корпус 5 дозирующего ротора 4 а опирается на месдозу 7 с возможностью ограниченного движения поворота. Момент опоры на месдозу 7, расположенную на расстоянии от оси А-А поворота, прямо пропорционален массовому потоку,транспортируемому по взвешивающему тракту дозирующего ротора 4 а от подающего устройства 3 до места 8 выгрузки. На нижнем конце корпуса 5 в направлении места 8 выгрузки заканчивается продувочный трубопровод 9. Меcдоза 7 и тахогенератор 6 а привода 6 соединены с электронным блоком 10 управления дозированием, который, тем самым, определяет мгновенный массовый поток X путем умножения мгновенной загрузки на частоту вращения/угловую скорость и приводит в соотношение с установленной производительностью W, а также через ПИ-регулятор, управляющую линию 15 и блок 20 управления двигателем, в частности частотный преобразователь, управляет приводным двигателем 6 дозирующего ротора 4 а для изменения частоты вращения или угловой скорости. Это управление или регулирование служит, в целом,для поддержания производительности X постоянной. Если на дозаторе 4 имеет место минусовое отклонение (например, -0,2%), то для поддержания производительности X постоянной угловую скорость дозирующего ротора 4 а повышают на соответствующее значение, т.е. здесь на +0,2%, как это известно само по себе за счет цепи регулирования на фиг. 1. Аналогичный блок 10 управления дозированием предусмотрен также в нижеследующих новых вариантах осуществления изобретения на фиг. 2-4, причем, однако, этот блок 10 управления дозированием соединен согласно изобретению непосредственно с блоком 20 управления двигателем в один узел G. Важное значение имеет при этом то, что за счет соединения или связи блока 10 управления дозированием с блоком 20 управления двигателем (в большинстве случаев частотным преобразователем) можно существенно уменьшить затраты на кабельную разводку и герметизацию, так что, в целом, можно значительно уменьшить конструктивные затраты на дозатор 4, здесь на фиг. 2-4 на схематично изображенные дозирующие весы. К тому же за счет этого можно ускорить обмен данными на дозаторе 4, в частности поток сигналов с параметрами, такими как угловая скорость, частота вращения, взвешивающие сигналы от месдозы 7 и т.д. Таким образом, за счет соединения в один узел блока 10 управления дозированием и блока 20 управления двигателем можно практически при отсутствии изображенной на фиг. 1 сигнальной линии 15 обеспечить регулирование частоты вращения почти без простоев. Для этого (как известно) в вариантах осуществления изобретения для дальнейшей минимизации рассогласований также предусмотрены изображенные на фиг. 1 компараторы или интегральные схемы. Если, например, подаваемого в точке Р предварительного управления (фиг. 1 и WO 99/13302) к приводному двигателю 6 заданного значения недостаточно для желаемой производительности из-за общей инерции, то за счет предварительного смещения точки Р предварительного управления относительно места 8 выгрузки можно создать требуемый промежуток времени для ускорения/замедления дозатора 4 со своевременным достижением управляемой скорости в месте 8 выгрузки и, тем самым, управлять или регулировать с помощью дозатора 4 заданный массовый поток W. Точка Р предварительного управления должна быть при этом как можно ближе к месту 8 выгрузки, так что целесообразны приводы 6 с сильным ускорением/замедлением и быстросрабатывающие частотные преобразователи в качестве блока 20 управления двигателем. На фиг. 3 изображено предпочтительное выполнение устройства для непрерывного гравиметрического дозирования и определения массового потока, причем узел G из комбинации блока 10 управления дозированием и блока 20 управления двигателем при аналогичной в остальном конструкции, как на фиг. 1 и 2, соединен непосредственно с приводным двигателем 6 дозатора 4. В зависимости от мгновенной загрузки дозирующей ленты можно, тем самым, изменять также начало или момент запуска регулирования частоты вращения приводного двигателя 6 с учетом соответствующего инерционного момента для соблюдения заданной производительности W. В блоке 10 управления дозированием могут храниться при этом также конструктивно заданные геометрические параметры, такие как собственная масса и длина дозирующей ленты, так что, измерив тахогенератором 6 а или датчиком импульсов фактическую угловую скорость, можно получить точную информацию о том, когда в месте 8 выгрузки произойдет установленная дозатором 4 с помощью месдозы 7 загрузка, и, тем самым, можно будет осуществить соответствующее подрегулирование путем увеличения/уменьшения скорости транспортировки. Хотя здесь в качестве дозатора 4 были описаны дозирующий ротор и дозирующие ленточные весы,-2 007756 описанное устройство управления и регулирования может использоваться также в дозирующем шнековом транспортере или аналогичных дозаторах для повышения в короткое время точности дозирования в месте выгрузки или сброса, поскольку также здесь могут иметь место значительные инерционные моменты. При этом узел G может быть встроен или установлен также внутри дозатора 4, как это показано на фиг. 4 на примере промежутка между ветвями дозирующих ленточных весов. За счет этого можно реализовать особенно компактную конструкцию. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для непрерывного гравиметрического дозирования и определения массового потока текучих материалов, содержащее дозатор с определением мгновенного массового потока перед местом выгрузки посредством блока управления дозированием, причем управление выгрузкой происходит за счет изменения частоты вращения привода дозатора посредством блока управления двигателем, отличающееся тем, что блок (10) управления дозированием и блок (20) управления двигателем соединены в один узел (G). 2. Устройство по п.1, отличающееся тем, что узел (G) связан с приводом (6) дозатора (4). 3. Устройство по п.1 или 2, отличающееся тем, что привод (6) дозатора (4) содержит устройство регистрации частоты вращения, в частности тахогенератор (6 а), для регистрации фактической частоты вращения, причем устройство регистрации частоты вращения соединенo с блоком (10) управления дозированием, или дозатор (4) представляет собой отдельное устройство регистрации частоты вращения, например фрикционное колесо или датчик импульсов. 4. Устройство по пп.1, 2 или 3, отличающееся тем, что узел (G) расположен в распределительном шкафу или внутри дозатора (4). 5. Устройство по одному из пп.1-4, отличающееся тем, что блок (10) управления дозированием содержит по меньшей мере одну интегральную схему, которая регистрирует возникающее при случае отклонение в месте (8) выгрузки или сразу за ним и соответственно корректирует заданное значение блока(10) управления дозированием. 6. Устройство по п.5, отличающееся тем, что в блоке (10) управления дозированием предусмотрен компаратор для изменения положения точки (Р) предварительного управления. 7. Устройство по одному из пп.1-6, отличающееся тем, что блок (20) управления двигателем выполнен в виде частотного преобразователя или тиристорного блока управления. 8. Устройство по одному из пп.1-7, отличающееся тем, что привод (6) выполнен в виде асинхронного, синхронного, векторного или реактивного двигателя.
МПК / Метки
МПК: G01G 11/08
Метки: дозирования, непрерывного, устройство, гравиметрического
Код ссылки
<a href="https://eas.patents.su/5-7756-ustrojjstvo-dlya-nepreryvnogo-gravimetricheskogo-dozirovaniya.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство для непрерывного гравиметрического дозирования</a>
Устройство для непрерывного гравиметрического дозирования и пневмотранспортирования сыпучего материала
Номер патента: 6002
Опубликовано: 25.08.2005
Авторы: Вольфшаффнер Хуберт, Хефнер Ханс Вильгельм
МПК: B65G 53/46, G01G 11/08
Метки: устройство, материала, дозирования, гравиметрического, непрерывного, сыпучего, пневмотранспортирования
Формула / Реферат:
1. Устройство для непрерывного гравиметрического дозирования и пневмотранспортирования сыпучего материала, направляемого по измерительному тракту расположенным герметично под давлением в корпусе (2), снабженным транспортирующими карманами (1a) ротором-дозатором (1), причем в корпусе (2) предусмотрена позиция загрузки сыпучего материала и позиция опорожнения с присоединениями к подводящему (4) и отводящему (5) трубопроводам системы...
Способ и устройство для гравиметрического дозирования сыпучего материала
Номер патента: 5447
Опубликовано: 24.02.2005
Автор: Вольфшаффнер Хуберт
МПК: G01G 13/02
Метки: сыпучего, способ, материала, гравиметрического, устройство, дозирования
Формула / Реферат:
1. Способ гравиметрического дозирования сыпучего материала, который подают из питающего бункера в приемный бункер, там взвешивают с образованием сигнала взвешивания для направления в электронную систему взвешивания и затем из приемного бункера переводят в гравиметрическое устройство дозирования, отличающийся тем, что сыпучий материал перед взвешиванием в приемном бункере (1) промежуточно накапливают в промежуточном резервуаре (6) и передают...
Устройство для непрерывного магнитного разделения жидких смесей
Номер патента: 4133
Опубликовано: 25.12.2003
Авторы: Филиппов Виктор Иванович, Дарашкевич Олег Николаевич
МПК: B03C 1/28
Метки: разделения, непрерывного, устройство, жидких, магнитного, смесей
Формула / Реферат:
1. Устройство для непрерывного магнитного разделения жидких смесей, включающее в себя приемник отделяемых частиц и разделительную камеру, которая выполнена в виде горизонтально расположенного вращающегося барабана, содержащего постоянный магнит в виде сегмента тела вращения, закрепленный неподвижно в нижней его части, и частично перекрывающегося с кюветой, снабженной подводящим и отводящим патрубками, соединенными с резервуарами для разделяемой...
Устройство для непрерывного литья металлических полос
Номер патента: 5759
Опубликовано: 30.06.2005
Авторы: Эстлунд Стуре, Сивессон Патрик
МПК: B22D 11/041
Метки: устройство, литья, непрерывного, полос, металлических
Формула / Реферат:
1. Устройство для непрерывного вертикального литья металлических полос, содержащее литейную форму (10), которая имеет верхний и нижний концы и полость (C) с открытыми концами, имеющую входное отверстие (E) литейной формы, расположенное на указанном верхнем конце, и выходное отверстие для полосы, расположенное на указанном нижнем конце; промежуточный ковш (11), предназначенный для удержания жидкого металла и имеющий выпускное отверстие (11A),...
Способ и устройство для непрерывного изготовления профильных секций.
Номер патента: 290
Опубликовано: 25.02.1999
Автор: Янссон Марк Ларс
МПК: B29C 47/24
Метки: изготовления, секций, непрерывного, устройство, профильных, способ
Формула / Реферат:
1. Способ для непрерывного изготовления профилированных секций, отличающийся тем, что осуществляют непрерывное нагнетание вещества (3) в виде пластически/термически деформируемого материала через канал (2) прохождением вращающегося штампа (5), служащего в качестве формующего устройства для образования одной или нескольких удлиненных профилированных секций (11, 12), и вдавливанием упомянутого материала (3) в ходе продвижения его в одну или...