Дистанционно управляемая переносная пусковая установка для переносного противотанкового ракетного комплекса
Номер патента: 21656
Опубликовано: 31.08.2015
Авторы: Емельянов Владимир Иванович, Сладков Алексей Константинович, Цурко Дмитрий Сергеевич, Семериков Игорь Борисович, Лемехов Анатолий Николаевич, Борис Вадим Чеславович, Полоневич Марк Григорьевич, Косьяненко Илья Борисович, Шаховский Владимир Егорович, Бурдыко Валерий Витальевич
Формула / Реферат
Дистанционно управляемая переносная пусковая установка для переносного противотанкового ракетного комплекса, содержащая опорный станок с треногой, аппаратурный контейнер, закрепленный на станке, подвижную поворотную платформу, соединенную с аппаратурным контейнером поворотным сочленением, отличающаяся тем, что аппаратурный контейнер пусковой установки содержит электронную систему управления, включающую процессорную плату формата РС/104-Plus, плату управления силовыми следящими приводами по горизонтали и вертикали, представляющую цифровой PID регулятор, плату видеозахвата, CAN-преобразователь интерфейсов, формирователь стартового сигнала, процессорная плата по кабелю соединена внешним сетевым интерфейсом типа Ethernet с пультом дистанционного управления, а внутренним шинным CAN v. 2.0А интерфейсом соединена с платой управления силовыми следящими приводами по горизонтали и вертикали, преобразователем интерфейсов, платой видеозахвата и формирователем стартового сигнала, плата управления силовыми следящими приводами имеет два выходных канала, по одному каналу плата управления силовыми следящими приводами электрически соединена с силовым следящим приводом по горизонтали, а по другому соединена с силовым следящим приводом по вертикали, преобразователь интерфейсов по внутреннему шинному интерфейсу соединен с платой управления силовыми следящими приводами и по отдельному интерфейсу электрически соединен с телевизионно-лазерным прибором наведения, установленным на подвижной поворотной платформе пусковой установки, плата видеозахвата электрически соединена с телевизионным каналом телевизионно-лазерного прибора наведения, формирователь стартового сигнала электрически соединен с механизмом запуска ракеты из транспортно-пускового контейнера, установленного на платформе подвижной поворотной платформы пусковой установки.


Текст
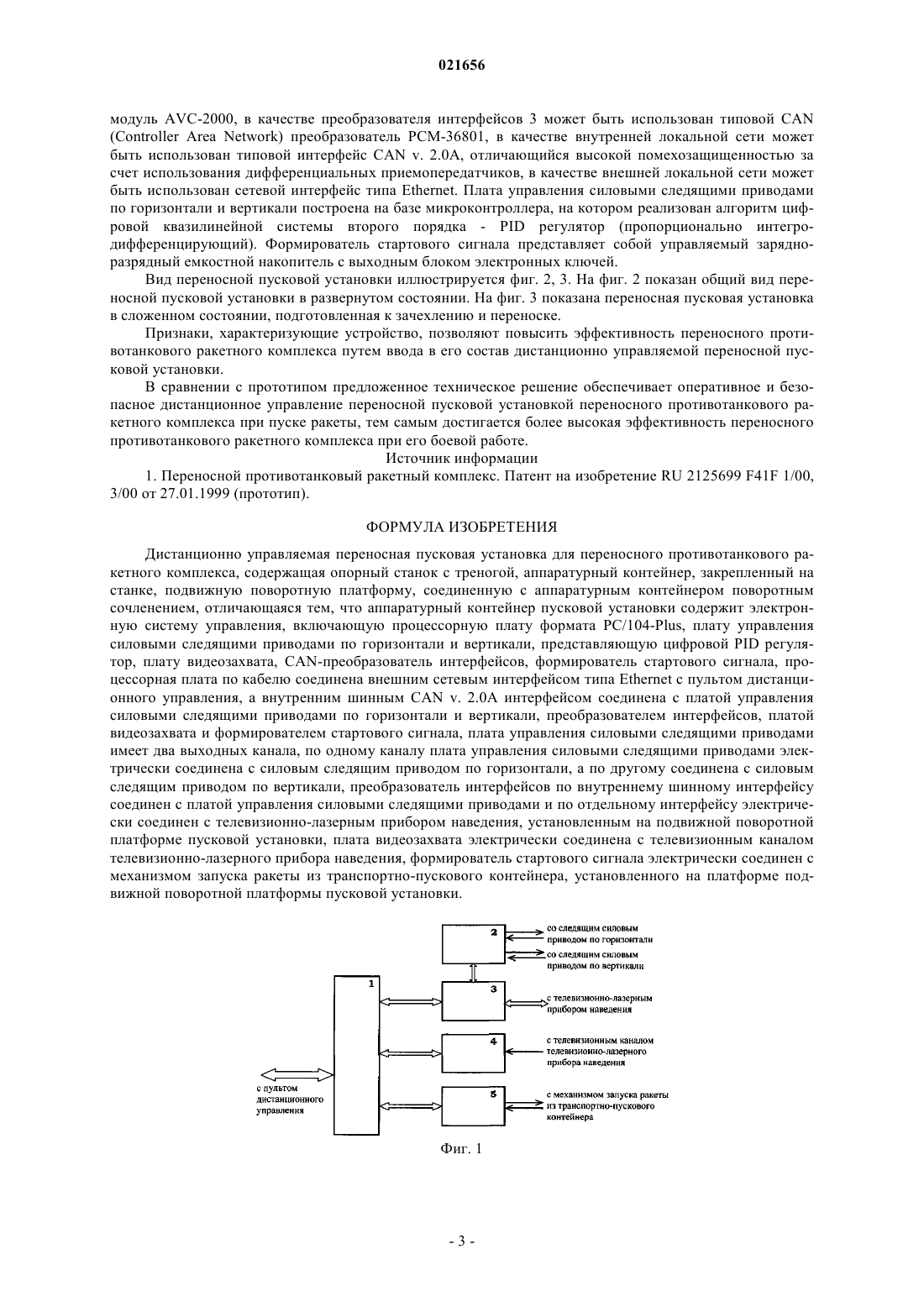
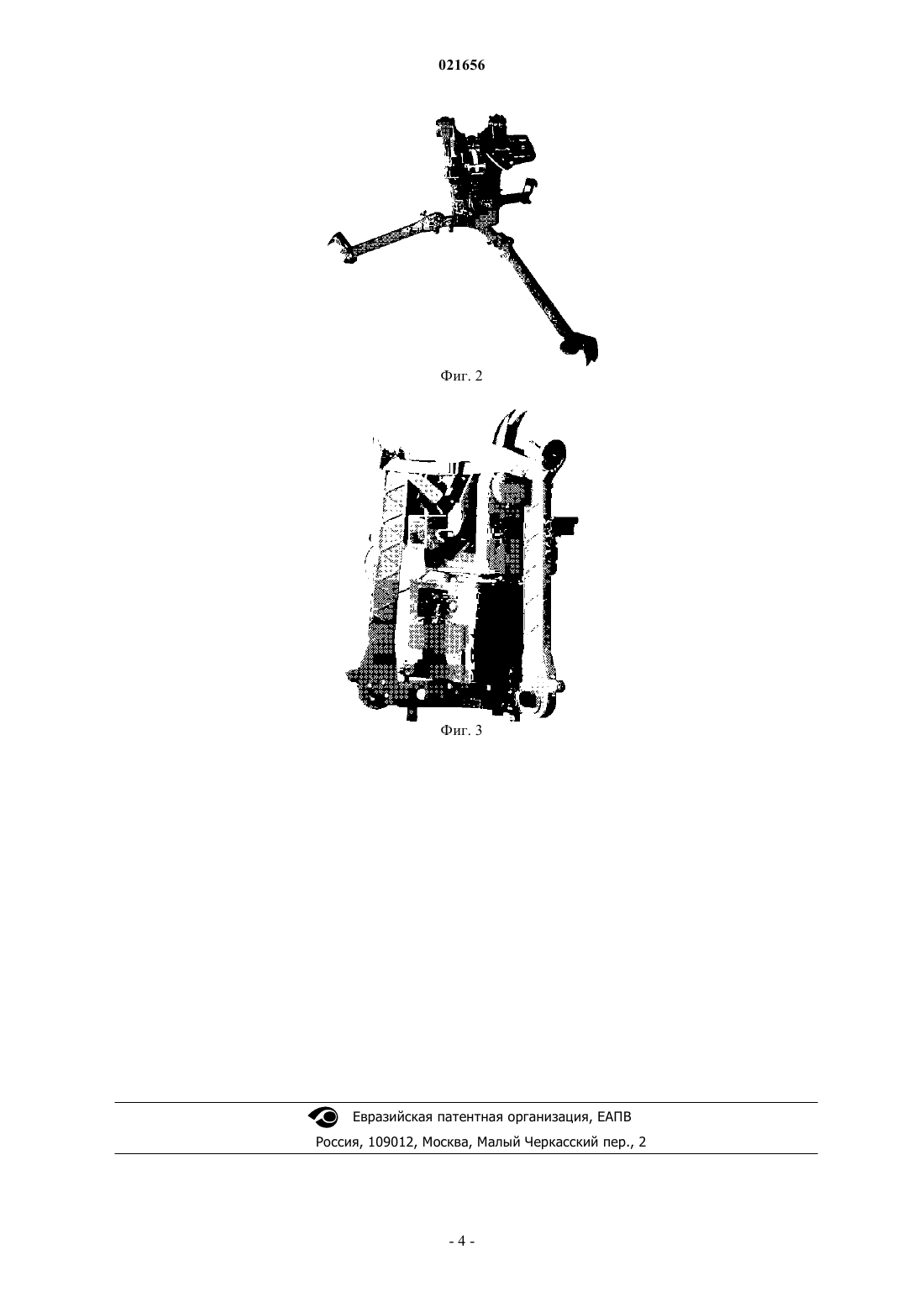
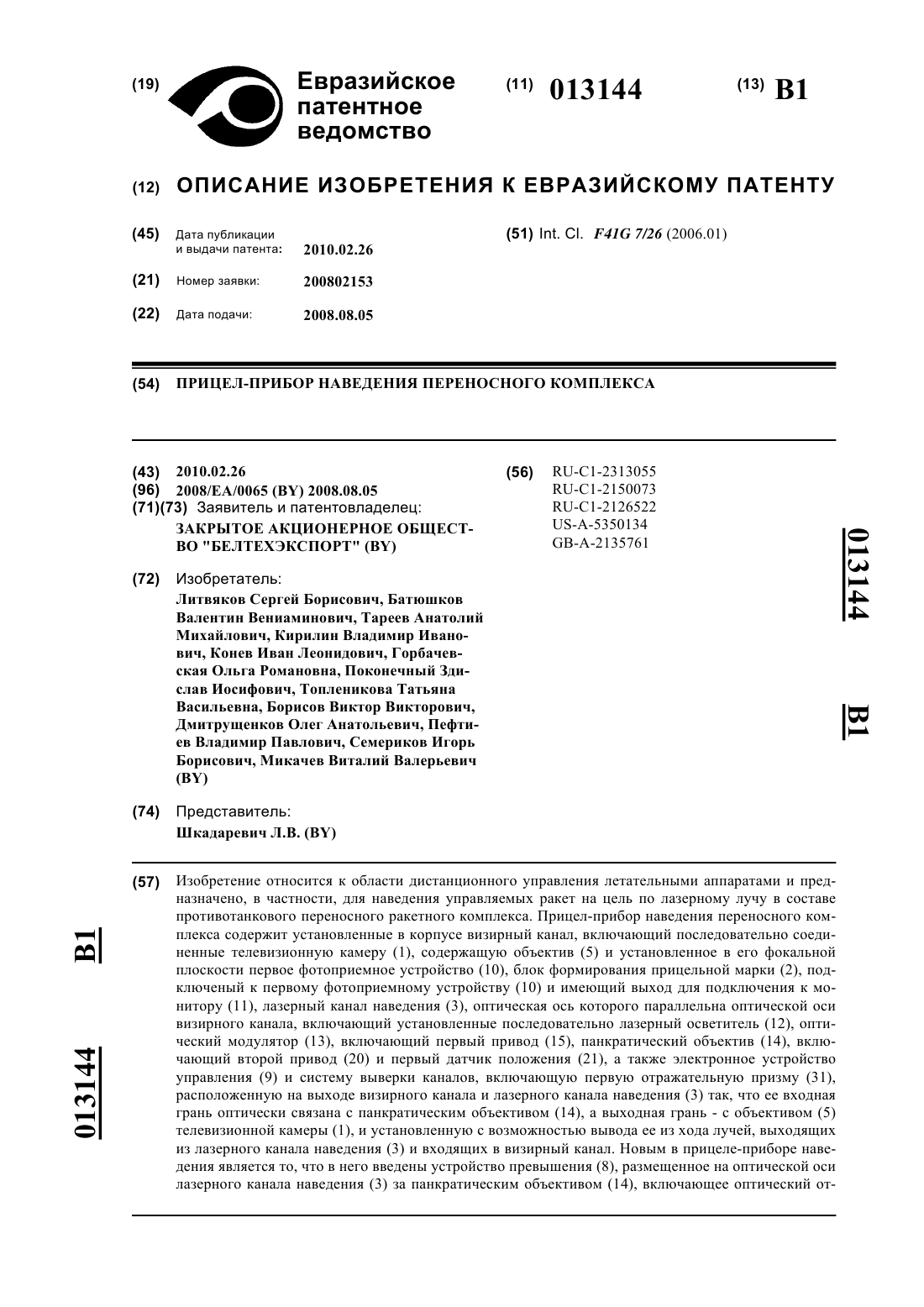
ДИСТАНЦИОННО УПРАВЛЯЕМАЯ ПЕРЕНОСНАЯ ПУСКОВАЯ УСТАНОВКА ДЛЯ ПЕРЕНОСНОГО ПРОТИВОТАНКОВОГО РАКЕТНОГО КОМПЛЕКСА Григорьевич, Косьяненко Илья Борисович, Бурдыко Валерий Витальевич (BY) Изобретение относится к области вооружения и может использоваться в противотанковых ракетных комплексах. Кроме военной техники предлагаемое устройство может использоваться в установках для автоматической видеосъемки и других комплексах, требующих мобильной отработки координат по азимуту и углу места. Предложена дистанционно управляемая переносная пусковая установка для переносного противотанкового ракетного комплекса, содержащая опорный станок с треногой, аппаратурный контейнер,закрепленный на станке, подвижную поворотную платформу, соединенную с аппаратурным контейнером поворотным сочленением. Новым является то, что в аппаратурный контейнер пусковой установки введена электронная система управления, содержащая процессорную плату, плату управления силовыми следящими приводами по горизонтали и вертикали, плату видеозахвата, преобразователь интерфейсов, формирователь стартового сигнала, процессорная плата по кабелю соединена внешним сетевым интерфейсом с пультом дистанционного управления, а внутренним шинным интерфейсом соединена с платой управления силовыми следящими приводами по горизонтали и вертикали, преобразователем интерфейсов, платой видеозахвата и формирователем стартового сигнала, плата управления силовыми следящими приводами имеет два выходных канала, по одному каналу плата управления силовыми следящими приводами электрически соединена с силовым следящим приводом по горизонтали, а по другому соединена с силовым следящим приводом по вертикали, преобразователь интерфейсов по внутреннему шинному интерфейсу соединен с платой управления силовыми следящими приводами и по отдельному интерфейсу электрически соединен с телевизионно-лазерным прибором наведения, установленным на подвижной поворотной платформе пусковой установки, плата видеозахвата электрически соединена с телевизионным каналом телевизионно-лазерного прибора наведения, формирователь стартового сигнала электрически соединен с механизмом запуска ракеты из транспортно-пускового контейнера, установленного на подвижной поворотной платформе пусковой установки. Техническим результатом изобретения является осуществление оперативного дистанционного управления переносной пусковой установкой переносного противотанкового ракетного комплекса при поиске,обнаружении и распознавании цели, измерении дальности до цели, прицеливании по цели с помощью телевизионно-лазерного прибора наведения, при обеспечении старта ракеты из транспортно-пускового контейнера, при наведении ракеты на цель с использованием телевизионно-лазерного прибора наведения. Дистанционное управление переносной пусковой установкой с безопасного расстояния обеспечивает безопасность оператора-наводчика при осуществлении боевой работы переносным противотанковым ракетным комплексом.(71)(73) Заявитель и патентовладелец: ЗАКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО "ЦНИП" (BY) Изобретение относится к области вооружения и может использоваться в противотанковых ракетных комплексах. Кроме военной техники предлагаемое устройство может использоваться в установках для автоматической видеосъемки и других комплексах, требующих мобильной отработки координат по азимуту и углу места. Известен переносной противотанковый ракетный комплекс, содержащий треногу, вращающийся вертлюг, механизмы вертикального и горизонтального наведения, прицел-прибор наведения, ракету в контейнере, электрически соединенную с механизмом запуска [1], выбранный за прототип, как наиболее близкий по совокупности существенных признаков. Недостатком известного переносного противотанкового ракетного комплекса является то, что управление пусковой установкой оператором-наводчиком осуществляется с помощью органов управления, расположенных непосредственно на пусковой установке, уровень автоматизации управления не высок. При запуске ракеты из контейнера на оператора-наводчика воздействует акустическое и ударное воздействие газовой струи реактивной двигательной установки стартующей ракеты. Аварийный старт ракеты может привести к гибели оператора-наводчика. Задачей предлагаемого технического решения является обеспечение оперативного и безопасного дистанционного управления переносной пусковой установкой при пуске ракеты переносным противотанковым ракетным комплексом. Поставленная задача достигается тем, что в дистанционно управляемую переносную пусковую установку для переносного противотанкового ракетного комплекса, содержащую опорный станок с треногой, аппаратурный контейнер, закрепленный на станке, подвижную поворотную платформу, соединенную с аппаратурным контейнером поворотным сочленением, в аппаратурный контейнер пусковой установки введена электронная система управления, содержащая процессорную плату, плату управления силовыми следящими приводами по горизонтали и вертикали, плату видеозахвата, преобразователь интерфейсов, формирователь стартового сигнала, процессорная плата по кабелю соединена внешним сетевым интерфейсом с пультом дистанционного управления, а внутренним шинным интерфейсом соединена с платой управления силовыми следящими приводами по горизонтали и вертикали, преобразователем интерфейсов, платой видеозахвата и формирователем стартового сигнала, плата управления силовыми следящими приводами имеет два выходных канала, по одному каналу плата управления силовыми следящими приводами электрически соединена с приводом по горизонтали, а по другому соединена с приводом по вертикали, преобразователь интерфейсов по внутреннему шинному интерфейсу соединен с платой управления силовыми следящими приводами и по отдельному интерфейсу электрически соединен с телевизионно-лазерным прибором наведения, установленным на подвижной поворотной платформе пусковой установки, плата видеозахвата электрически соединена с телевизионным каналом телевизионно-лазерного прибора наведения, формирователь стартового сигнала электрически соединен с механизмом запуска ракеты из транспортно-пускового контейнера установленного на платформе подвижной поворотной платформе пусковой установки. Безопасность использования пусковой установки достигается территориальным размещением оператора-наводчика с пультом дистанционного управления на расстоянии от пусковой установки, гарантирующем его безопасность при пуске ракеты, а также при аварийных ситуациях. Предлагаемое техническое решение поясняется графическим материалом. На фиг. 1 приведена структурная электрическая схема электронной системы управления предложенного устройства. Электронная система содержит процессорную плату 1, плату управления силовыми следящими приводами по горизонтали и вертикали 2, преобразователь интерфейсов 3, плату видеозахвата 4, формирователь стартового сигнала 5. Дистанционно управляемая переносная пусковая установка для переносного противотанкового ракетного комплекса работает следующим образом. Процессорная плата 1 по внешнему сетевому интерфейсу соединена с пультом дистанционного управления, а по внутреннему шинному интерфейсу соединена с платой управления силовыми следящими приводами по горизонтали и вертикали 2, преобразователем интерфейсов 3, платой видеозахвата 4,формирователем стартового сигнала 5. Плата управления приводами 2 по внутреннему шинному интерфейсу соединена с преобразователем интерфейсов 3. Один выход платы управления приводами 2 соединен с силовым следящим приводом по горизонтали, второй выход соединен с силовым следящим приводом по вертикали. Преобразователь интерфейсов 3 по отдельному интерфейсу соединен с телевизионно-лазерным прибором наведения, крепящимся к подвижной поворотной платформе переносной пусковой установки. Плата видеозахвата 4 электрически соединена с телевизионным каналом телевизионно-лазерного прибора наведения. Формирователь стартового сигнала 5 электрически соединен с механизмом запуска ракеты из транспортно-пускового контейнера, размещаемого на подвижной поворотной платформе переносной пусковой установки. Пусковая установка работает следующим образом. От телевизионного канала прибора наведения на плату видеозахвата 4 поступает стандартный телевизионный сигнал в аналоговом виде. Плата видеозахвата 4 преобразует аналоговый телевизионный сигнал в цифровой вид и по внутреннему шинному интерфейсу передает преобразованный видеосигнал на процессорную плату 1, которая поступивший видеосигнал транслирует по внешнему сетевому интерфейсу на пульт дистанционного управления. По команде с пульта дистанционного управления, поступающей по внешнему сетевому интерфейсу на процессорную плату 1 и передаваемой далее по внутреннему шинному интерфейсу через преобразователь интерфейсов 3 на телевизионно-лазерный прибор наведения, в нм может устанавливаться один из трех масштабов видеоизображения - широкое поле зрения, узкое поле зрения, узкое поле зрения с двойным увеличением. По индицируемому на пульте дистанционного управления видеоизображению в широком поле зрения осуществляется обнаружение, распознавание и выбор цели для обстрела переносным противотанковым ракетным комплексом. Производится измерение дальности до выбранной для обстрела цели. Команда на измерение дальности по внешнему сетевому интерфейсу от пульта дистанционного управления поступает на процессорную плату 1 и далее по внутреннему шинному интерфейсу через преобразователь интерфейсов 3 поступает на лазерный дальномер телевизионно-лазерного прибора наведения. Данные результата измерения дальности до цели от телевизионно-лазерного прибора наведения по отдельному интерфейсу поступают на преобразователь интерфейсов 3 и далее на процессорную плату 1, а затем по внешнему сетевому интерфейсу передаются на пульт дистанционного управления. При принятии решения на пуск ракеты по команде с пульта дистанционного управления, поступающей по внешнему сетевому интерфейсу на процессорную плату 1 и далее по внутреннему шинному интерфейсу на преобразователь интерфейсов 3, а с него по отдельному интерфейсу на телевизионнолазерный прибор наведения, на нем устанавливается масштаб видеоизображения - узкое поле зрения либо узкое поле с двойным увеличением. По видеоизображению в узком поле зрения (узком поле зрения с двойным увеличением), индицируемому на пульте дистанционного управления, производится прицеливание по выбранной для обстрела цели. Команды наведения пусковой установки на выбранную цель с пульта дистанционного управления по внешнему сетевому интерфейсу поступают на процессорную плату 1 и далее по внутреннему шинному интерфейсу через преобразователь интерфейсов 3 на плату управления силовыми следящими приводами по горизонтали и вертикали 2. Плата управления силовыми следящими приводами 2 вырабатывает управляющие сигналы, соответствующие поступившим от пульта дистанционного управления командам управления, и передает их следящим силовым приводам по горизонтали и вертикали. Силовые следящие привода по горизонтали и вертикали отрабатывают поступившие на них с платы управления 2 управляющие сигналы. Данные о текущем значении пространственного положения силовых следящих приводов по горизонтали и вертикали поступают от приводов на плату управления 2, с не по внутреннему шинному интерфейсу поступают на преобразователь интерфейсов 3 и далее на процессорную плату 1, а затем по внешнему сетевому интерфейсу на пульт дистанционного управления. Процесс отработки управляющих команд силовыми следящими приводами контролируется по средствам индикации на пульте дистанционного управления. Запуск ракеты инициируется командой СТАРТ с пульта дистанционного управления, поступающей по внешнему сетевому интерфейсу на процессорную плату 1, а далее по внутреннему шинному интерфейсу на формирователь стартового сигнала 5. По поступлении команды СТАРТ формирователь стартового сигнала 5 формирует аналоговый управляющий сигнал ПОДЖИГ и подает его на механизм запуска ракеты из транспортно-пускового контейнера. По истечении времени задержки происходит старт ракеты из транспортно-пускового контейнера. По выходу ракеты из контейнера вырабатывается аналоговая команда СХОД, которая от транспортно-пускового контейнера поступает на формирователь стартового сигнала 5 и оцифровывается, затем по внутреннему шинному интерфейсу через процессорную плату 1 на преобразователь интерфейсов 3, далее по отдельному интерфейсу на лазерный канал управления телевизионно-лазерного прибора управления, инициируя формирование лазерного поля управления ракетой в полете. В процессе полета ракеты к цели по средствам индикации на пульте дистанционного управления контролируется положение точки прицеливания относительно цели. При необходимости, с пульта дистанционного управления по внешнему сетевому интерфейсу на процессорную плату 1 подаются команды управления, корректирующие текущее положение силовых следящих приводов по горизонтали и вертикали. Корректирующие команды по внутреннему шинному интерфейсу поступают через преобразователь интерфейсов 3 на плату управления силовыми следящими приводами 2. На плате управления силовыми следящими приводами 2 вырабатываются корректирующие сигналы управления, соответствующие поступившим командам управления, которые поступают на силовые следящие привода по горизонтали и вертикали. Процесс отработки корректирующих команд силовыми следящими приводами контролируется по средствам индикации на пульте дистанционного управления. В качестве процессорной платы 1 может быть использована типовая процессорная плата форматаPC/104-Plus РСМ-3362, в качестве платы видеозахвата 4 может быть использован типовой электронный модуль AVC-2000, в качестве преобразователя интерфейсов 3 может быть использован типовой CAN(Controller Area Network) преобразователь РСМ-36801, в качестве внутренней локальной сети может быть использован типовой интерфейс CAN v. 2.0A, отличающийся высокой помехозащищенностью за счет использования дифференциальных приемопередатчиков, в качестве внешней локальной сети может быть использован сетевой интерфейс типа Ethernet. Плата управления силовыми следящими приводами по горизонтали и вертикали построена на базе микроконтроллера, на котором реализован алгоритм цифровой квазилинейной системы второго порядка - PID регулятор (пропорционально интегродифференцирующий). Формирователь стартового сигнала представляет собой управляемый зарядноразрядный емкостной накопитель с выходным блоком электронных ключей. Вид переносной пусковой установки иллюстрируется фиг. 2, 3. На фиг. 2 показан общий вид переносной пусковой установки в развернутом состоянии. На фиг. 3 показана переносная пусковая установка в сложенном состоянии, подготовленная к зачехлению и переноске. Признаки, характеризующие устройство, позволяют повысить эффективность переносного противотанкового ракетного комплекса путем ввода в его состав дистанционно управляемой переносной пусковой установки. В сравнении с прототипом предложенное техническое решение обеспечивает оперативное и безопасное дистанционное управление переносной пусковой установкой переносного противотанкового ракетного комплекса при пуске ракеты, тем самым достигается более высокая эффективность переносного противотанкового ракетного комплекса при его боевой работе. Источник информации 1. Переносной противотанковый ракетный комплекс. Патент на изобретение RU 2125699 F41F 1/00,3/00 от 27.01.1999 (прототип). ФОРМУЛА ИЗОБРЕТЕНИЯ Дистанционно управляемая переносная пусковая установка для переносного противотанкового ракетного комплекса, содержащая опорный станок с треногой, аппаратурный контейнер, закрепленный на станке, подвижную поворотную платформу, соединенную с аппаратурным контейнером поворотным сочленением, отличающаяся тем, что аппаратурный контейнер пусковой установки содержит электронную систему управления, включающую процессорную плату формата РС/104-Plus, плату управления силовыми следящими приводами по горизонтали и вертикали, представляющую цифровой PID регулятор, плату видеозахвата, CAN-преобразователь интерфейсов, формирователь стартового сигнала, процессорная плата по кабелю соединена внешним сетевым интерфейсом типа Ethernet с пультом дистанционного управления, а внутренним шинным CAN v. 2.0 А интерфейсом соединена с платой управления силовыми следящими приводами по горизонтали и вертикали, преобразователем интерфейсов, платой видеозахвата и формирователем стартового сигнала, плата управления силовыми следящими приводами имеет два выходных канала, по одному каналу плата управления силовыми следящими приводами электрически соединена с силовым следящим приводом по горизонтали, а по другому соединена с силовым следящим приводом по вертикали, преобразователь интерфейсов по внутреннему шинному интерфейсу соединен с платой управления силовыми следящими приводами и по отдельному интерфейсу электрически соединен с телевизионно-лазерным прибором наведения, установленным на подвижной поворотной платформе пусковой установки, плата видеозахвата электрически соединена с телевизионным каналом телевизионно-лазерного прибора наведения, формирователь стартового сигнала электрически соединен с механизмом запуска ракеты из транспортно-пускового контейнера, установленного на платформе подвижной поворотной платформы пусковой установки.
МПК / Метки
МПК: F41G 5/06, F41F 3/042
Метки: комплекса, пусковая, установка, противотанкового, переносная, управляемая, дистанционно, ракетного, переносного
Код ссылки
<a href="https://eas.patents.su/5-21656-distancionno-upravlyaemaya-perenosnaya-puskovaya-ustanovka-dlya-perenosnogo-protivotankovogo-raketnogo-kompleksa.html" rel="bookmark" title="База патентов Евразийского Союза">Дистанционно управляемая переносная пусковая установка для переносного противотанкового ракетного комплекса</a>
Прицел-прибор наведения переносного комплекса
Номер патента: 13144
Опубликовано: 26.02.2010
Авторы: Батюшков Валентин Вениаминович, Тареев Анатолий Михайлович, Микачев Виталий Валерьевич, Семериков Игорь Борисович, Конев Иван Леонидович, Борисов Виктор Викторович, Дмитрущенков Олег Анатольевич, Топленикова Татьяна Васильевна, Поконечный Здислав Иосифович, Пефтиев Владимир Павлович, Литвяков Сергей Борисович, Кирилин Владимир Иванович, Горбачевская Ольга Романовна
МПК: F41G 7/26
Метки: прицел-прибор, переносного, наведения, комплекса
Формула / Реферат:
1. Прицел-прибор наведения переносного комплекса, содержащий установленные в корпусе визирный канал, включающий последовательно соединенные телевизионную камеру, содержащую объектив и установленное в его фокальной плоскости первое фотоприемное устройство, блок формирования прицельной марки, первый вход которого подключен к выходу первого фотоприемного устройства, и имеющий выход для подключения к монитору, лазерный канал наведения, оптическая...
Система управления зенитного ракетного комплекса малой дальности
Номер патента: 2202
Опубликовано: 28.02.2002
Авторы: Беркович Геннадий Михайлович, Сосков Юрий Александрович, Чирков Валерий Иванович, Осипов Валентин Валентинович, Дризе Иосиф Матвеевич, Морозов Валерий Вениаминович, Парфенов Александр Иванович, Ботвинов Алексей Кузьмич, Толкачев Михаил Александрович, Павлов Евгений Яковлевич, Корчагин Сергей Николаевич, Абрамов Владимир Иванович, Безверхов Михаил Алексеевич, Войсковский Евгений Иосифович, Хворых Юрий Васильевич, Ефремов Вениамин Павлович, Фомин Роберт Анатольевич, Чибисов Станислав Иванович, Барсукова Софья Алексеевна
МПК: G01S 13/72
Метки: малой, зенитного, комплекса, ракетного, управления, система, дальности
Формула / Реферат:
Система управления зенитного ракетного комплекса малой дальности, включающая размещенные на едином самоходном шасси или в транспортном контейнере средства обнаружения с радиолокатором кругового обзора, радиолокационный запросчик опознавания, средства сопровождения и точного измерения координат цели и ракеты, средства отображения информации, аппаратуру предстартовой подготовки ракеты и производства пуска, радиоответчик, автопилот ракеты,...
Дистанционно управляемая система соединения для подводных трубопроводов
Номер патента: 9707
Опубликовано: 28.02.2008
Авторы: Вудвард Нил, Берге Ян Олаф, Армстронг Майкл, Верлей Ричард
МПК: B23K 37/053, B23K 9/00, F16L 1/26...
Метки: управляемая, соединения, дистанционно, система, трубопроводов, подводных
Формула / Реферат:
1. Дистанционно управляемая система соединения для подводных трубопроводов для соединения двух концов трубопровода или концов труб, которые установлены обращенными друг к другу в линию на некотором расстоянии друг от друга с помощью средства, позволяющего перемещать хотя бы один конец трубопровода в боковых направлениях, отличающаяся тем, что содержит муфту трубы, имеющую внутренние уплотнители для каждой поверхности трубопровода, для вставки...
Зенитная управляемая ракета
Номер патента: 18694
Опубликовано: 30.09.2013
Авторы: Матвеев Владимир Анатольевич, Звонов Александр Александрович
МПК: F02M 27/04, F02K 9/62, F02K 9/42...
Метки: ракета, управляемая, зенитная
Формула / Реферат:
1. Управляемая зенитная ракета, содержащая корпус, внутри которого установлен маршевый реактивный двигатель, источник топлива для реактивного двигателя, боевая часть для поражения средств воздушного нападения, автопилот, бортовой источник электропитания и бортовая ЭВМ для управления бортовой аппаратурой и полетом ракеты, причем маршевый реактивный двигатель снабжен реактивным соплом и соединен по питающему входу с источником ракетного топлива, а...
Быстроразъемное соединительное устройство для ложи переносного огнестрельного оружия
Номер патента: 15049
Опубликовано: 29.04.2011
Автор: Моретти Луиджи
МПК: F41C 23/14
Метки: быстроразъемное, ложи, оружия, огнестрельного, соединительное, переносного, устройство
Формула / Реферат:
1. Быстроразъемное соединительное устройство для ложи переносного огнестрельного оружия, содержащее упругодеформируемый элемент, установленный в ложе переносного огнестрельного оружия и оснащенный средством зацепления с частью упомянутого переносного огнестрельного оружия, причем упомянутый упругодеформируемый элемент, имеющий положение, в котором он не является упругодеформированным, и положение, в котором он является упругодеформированным, при...
Предыдущий патент: Пусковое устройство
Следующий патент: Синтез динатриевой соли n4-(2,2-диметил-4-[(дигидрофосфонокси)метил]-3-оксо-5-пиридо[1,4]оксазин-6-ил)-5-фтор-n2-(3,4,5-триметоксифенил)-2,4-пиримидиндиамина
Случайный патент: Применение конъюгатов желчной кислоты или соли желчной кислоты с жирными кислотами для лечения жировой инфильтрации печени