Способ оценки результатов обследования скважины

Формула / Реферат
1. Способ оценки результатов обследования скважины, пробуренной в земной формации, согласно которому в буровую колонну вводят датчик, содержащий, по меньшей мере, один магнитометр и, по меньшей мере, один акселерометр и измеряют параметр поля земли и параметр положения, выбранный из наклона скважины и азимута скважины, после чего определяют разницу между значением измеренного параметра поля земли и известной величиной параметра поля земли, а также находят отношение этой разницы к теоретической погрешности измерения параметра поля земли и погрешность измеренного параметра положения.
2. Способ по п.1, в котором датчик содержит три магнитометра и три акселерометра.
3. Способ по любому из пп.1, 2, в котором каждая стадия определения теоретических погрешностей измерения упомянутых параметров включает определение теоретических погрешностей измерения для группы датчиков, к которой относится выбранный датчик.
4. Способ по любому из пп.1-3, в котором упомянутые теоретические погрешности измерения основаны, по меньшей мере, на одной погрешности датчика и погрешности определения параметра поля земли.
5. Способ по любому из пп.1-4, также включающий отбрасывание результатов измерений, если упомянутое отношение превышает 1.
6. Способ по любому из пп.1-5, в котором упомянутый параметр положения выбирается из параметра наклона и азимута скважины.
7. Способ по п.6, в котором первый режим работы по параметру положения определяет наклон скважины, а режим по параметру поля земли определяет поле тяготения земли, теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности датчика.
8. Способ по пп.6, 7, в котором второй режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет напряженность магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности датчика.
9. Способ по любому из пп.6-8, в котором третий режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет напряженность магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности определения магнитного поля земли.
10. Способ по любому из пп.6-9, в котором четвертый режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет угол склонения магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности датчика.
11. Способ по любому из пп.6-10, в котором пятый режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет угол склонения магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности параметра поля земли.
12. Способ по любому из пп.8-11, в котором стадия определения погрешности параметра измерения положения включает определение максимального абсолютного значения погрешностей измерения параметров положения, проводимых на втором, третьем, четвертом и пятом режимах работы.
Текст
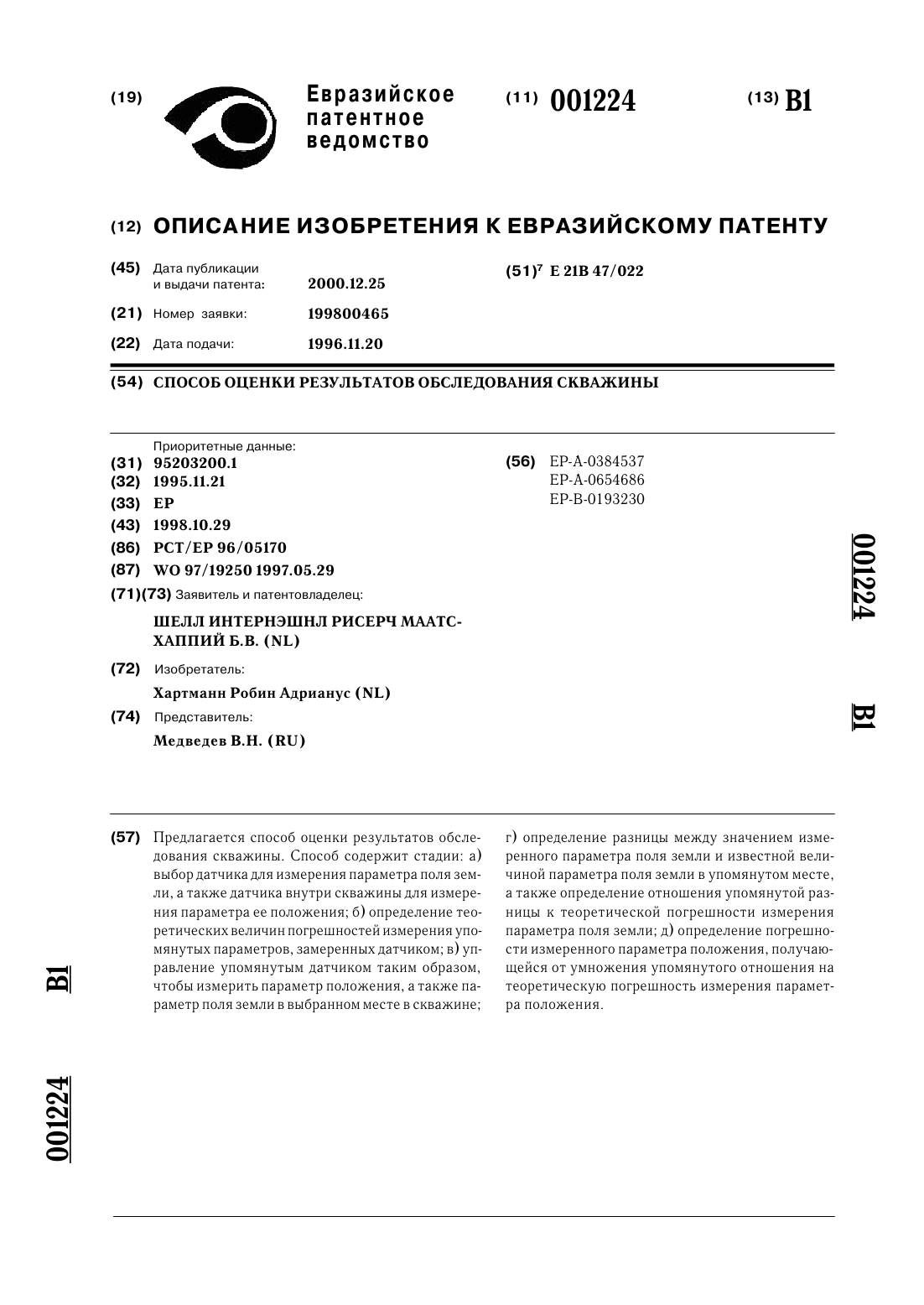
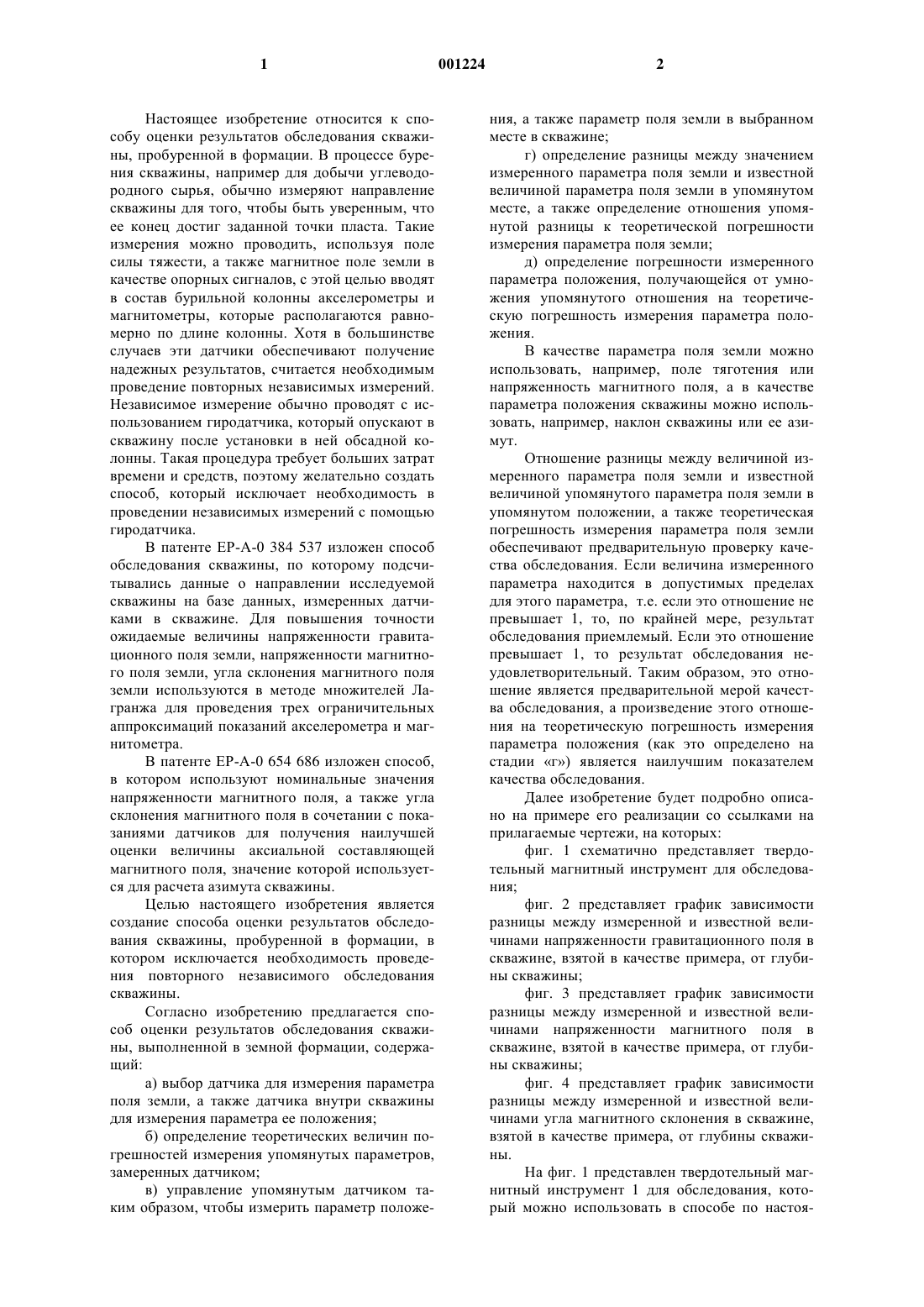
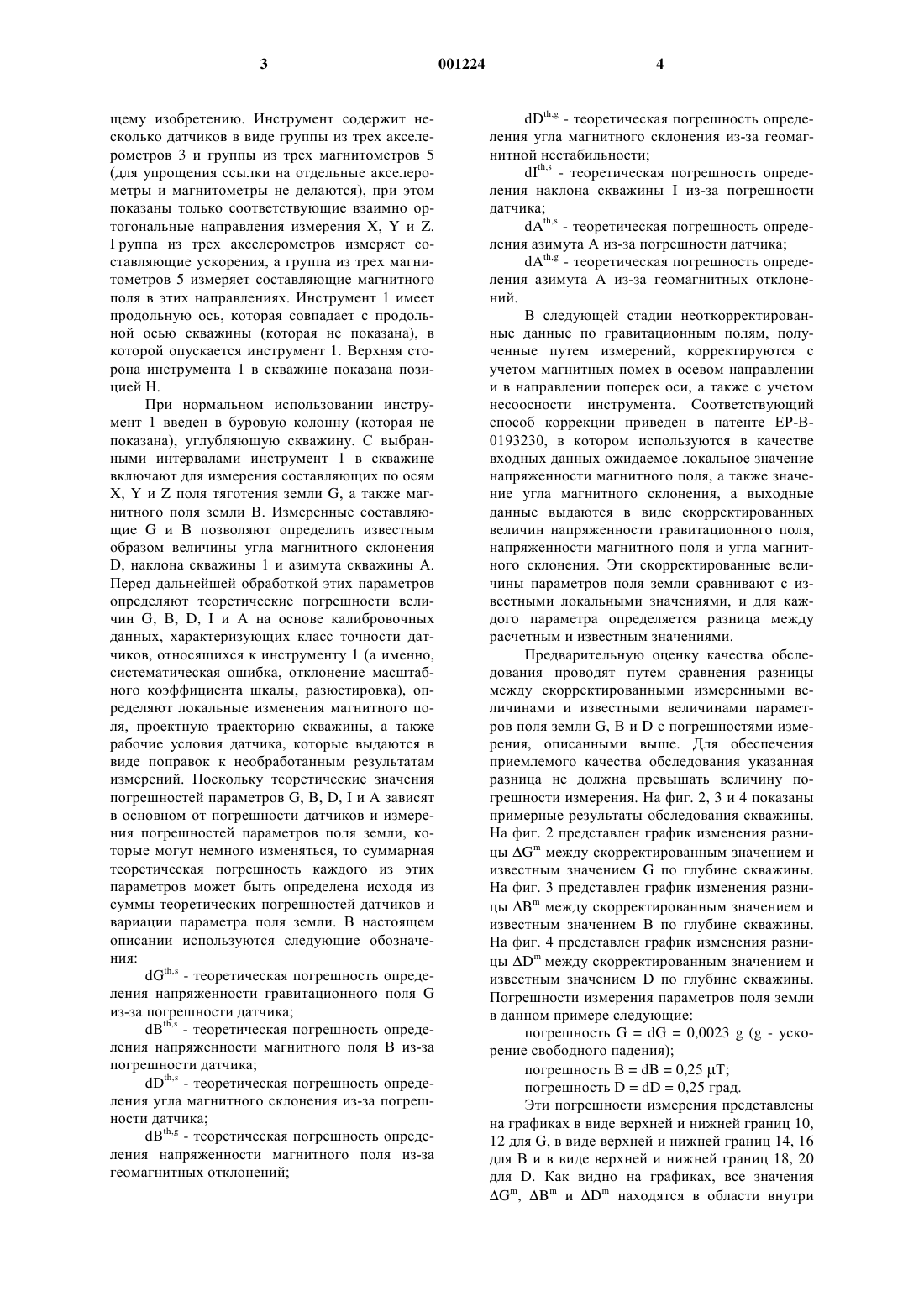
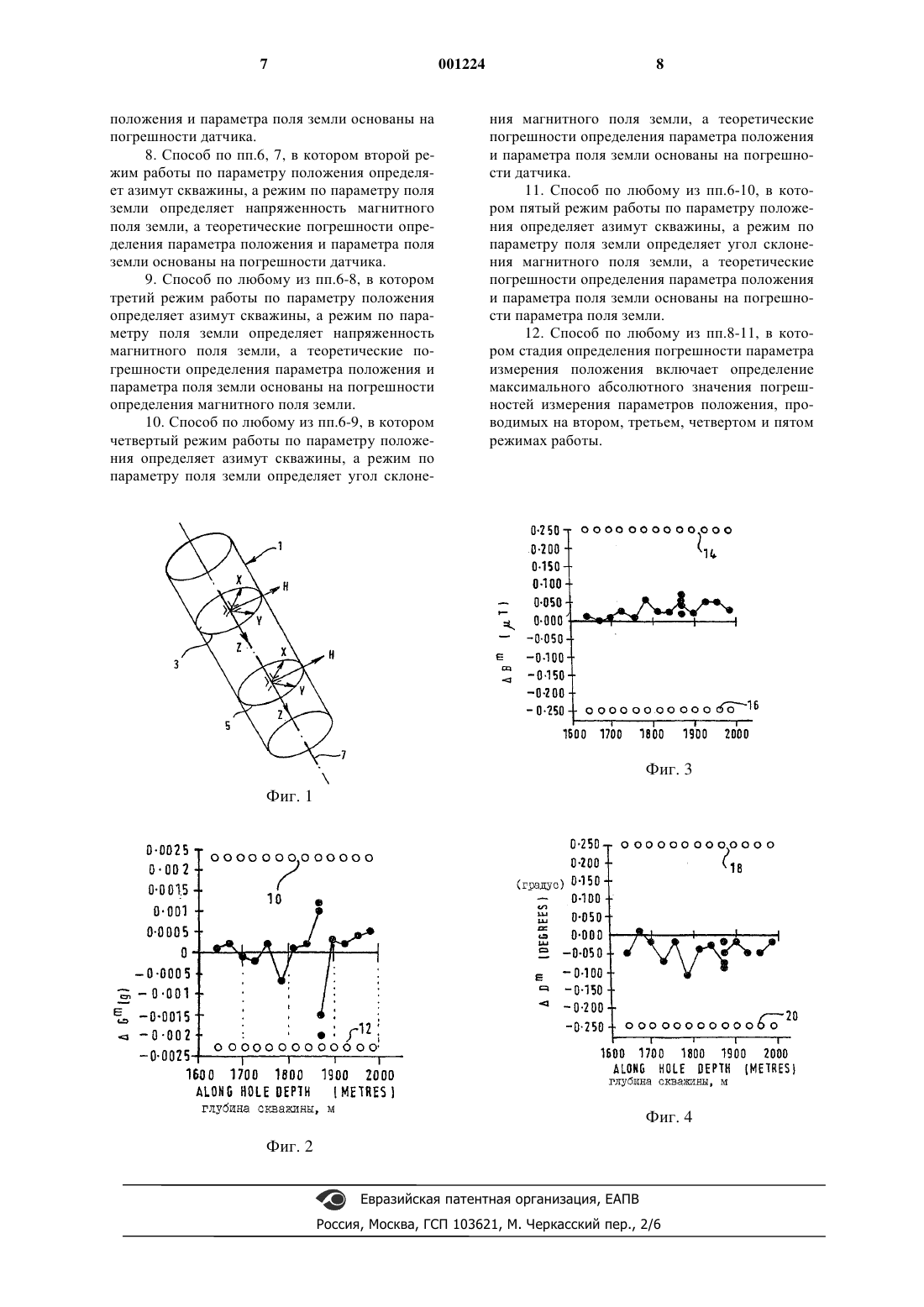
1 Настоящее изобретение относится к способу оценки результатов обследования скважины, пробуренной в формации. В процессе бурения скважины, например для добычи углеводородного сырья, обычно измеряют направление скважины для того, чтобы быть уверенным, что ее конец достиг заданной точки пласта. Такие измерения можно проводить, используя поле силы тяжести, а также магнитное поле земли в качестве опорных сигналов, с этой целью вводят в состав бурильной колонны акселерометры и магнитометры, которые располагаются равномерно по длине колонны. Хотя в большинстве случаев эти датчики обеспечивают получение надежных результатов, считается необходимым проведение повторных независимых измерений. Независимое измерение обычно проводят с использованием гиродатчика, который опускают в скважину после установки в ней обсадной колонны. Такая процедура требует больших затрат времени и средств, поэтому желательно создать способ, который исключает необходимость в проведении независимых измерений с помощью гиродатчика. В патенте ЕР-А-0 384 537 изложен способ обследования скважины, по которому подсчитывались данные о направлении исследуемой скважины на базе данных, измеренных датчиками в скважине. Для повышения точности ожидаемые величины напряженности гравитационного поля земли, напряженности магнитного поля земли, угла склонения магнитного поля земли используются в методе множителей Лагранжа для проведения трех ограничительных аппроксимаций показаний акселерометра и магнитометра. В патенте ЕР-А-0 654 686 изложен способ,в котором используют номинальные значения напряженности магнитного поля, а также угла склонения магнитного поля в сочетании с показаниями датчиков для получения наилучшей оценки величины аксиальной составляющей магнитного поля, значение которой используется для расчета азимута скважины. Целью настоящего изобретения является создание способа оценки результатов обследования скважины, пробуренной в формации, в котором исключается необходимость проведения повторного независимого обследования скважины. Согласно изобретению предлагается способ оценки результатов обследования скважины, выполненной в земной формации, содержащий: а) выбор датчика для измерения параметра поля земли, а также датчика внутри скважины для измерения параметра ее положения; б) определение теоретических величин погрешностей измерения упомянутых параметров,замеренных датчиком; в) управление упомянутым датчиком таким образом, чтобы измерить параметр положе 001224 2 ния, а также параметр поля земли в выбранном месте в скважине; г) определение разницы между значением измеренного параметра поля земли и известной величиной параметра поля земли в упомянутом месте, а также определение отношения упомянутой разницы к теоретической погрешности измерения параметра поля земли; д) определение погрешности измеренного параметра положения, получающейся от умножения упомянутого отношения на теоретическую погрешность измерения параметра положения. В качестве параметра поля земли можно использовать, например, поле тяготения или напряженность магнитного поля, а в качестве параметра положения скважины можно использовать, например, наклон скважины или ее азимут. Отношение разницы между величиной измеренного параметра поля земли и известной величиной упомянутого параметра поля земли в упомянутом положении, а также теоретическая погрешность измерения параметра поля земли обеспечивают предварительную проверку качества обследования. Если величина измеренного параметра находится в допустимых пределах для этого параметра, т.е. если это отношение не превышает 1, то, по крайней мере, результат обследования приемлемый. Если это отношение превышает 1, то результат обследования неудовлетворительный. Таким образом, это отношение является предварительной мерой качества обследования, а произведение этого отношения на теоретическую погрешность измерения параметра положения (как это определено на стадии г) является наилучшим показателем качества обследования. Далее изобретение будет подробно описано на примере его реализации со ссылками на прилагаемые чертежи, на которых: фиг. 1 схематично представляет твердотельный магнитный инструмент для обследования; фиг. 2 представляет график зависимости разницы между измеренной и известной величинами напряженности гравитационного поля в скважине, взятой в качестве примера, от глубины скважины; фиг. 3 представляет график зависимости разницы между измеренной и известной величинами напряженности магнитного поля в скважине, взятой в качестве примера, от глубины скважины; фиг. 4 представляет график зависимости разницы между измеренной и известной величинами угла магнитного склонения в скважине,взятой в качестве примера, от глубины скважины. На фиг. 1 представлен твердотельный магнитный инструмент 1 для обследования, который можно использовать в способе по настоя 3 щему изобретению. Инструмент содержит несколько датчиков в виде группы из трех акселерометров 3 и группы из трех магнитометров 5(для упрощения ссылки на отдельные акселерометры и магнитометры не делаются), при этом показаны только соответствующие взаимно ортогональные направления измерения X, Y и Z. Группа из трех акселерометров измеряет составляющие ускорения, а группа из трех магнитометров 5 измеряет составляющие магнитного поля в этих направлениях. Инструмент 1 имеет продольную ось, которая совпадает с продольной осью скважины (которая не показана), в которой опускается инструмент 1. Верхняя сторона инструмента 1 в скважине показана позицией Н. При нормальном использовании инструмент 1 введен в буровую колонну (которая не показана), углубляющую скважину. С выбранными интервалами инструмент 1 в скважине включают для измерения составляющих по осямX, Y и Z поля тяготения земли G, а также магнитного поля земли В. Измеренные составляющие G и В позволяют определить известным образом величины угла магнитного склоненияD, наклона скважины 1 и азимута скважины А. Перед дальнейшей обработкой этих параметров определяют теоретические погрешности величин G, В, D, I и А на основе калибровочных данных, характеризующих класс точности датчиков, относящихся к инструменту 1 (а именно,систематическая ошибка, отклонение масштабного коэффициента шкалы, разюстировка), определяют локальные изменения магнитного поля, проектную траекторию скважины, а также рабочие условия датчика, которые выдаются в виде поправок к необработанным результатам измерений. Поскольку теоретические значения погрешностей параметров G, В, D, I и А зависят в основном от погрешности датчиков и измерения погрешностей параметров поля земли, которые могут немного изменяться, то суммарная теоретическая погрешность каждого из этих параметров может быть определена исходя из суммы теоретических погрешностей датчиков и вариации параметра поля земли. В настоящем описании используются следующие обозначения:dGth,s - теоретическая погрешность определения напряженности гравитационного поля G из-за погрешности датчика;dBth,s - теоретическая погрешность определения напряженности магнитного поля В из-за погрешности датчика;dDth,s - теоретическая погрешность определения угла магнитного склонения из-за погрешности датчика;dBth,g - теоретическая погрешность определения напряженности магнитного поля из-за геомагнитных отклонений;dDth,g - теоретическая погрешность определения угла магнитного склонения из-за геомагнитной нестабильности;dIth,s - теоретическая погрешность определения наклона скважины I из-за погрешности датчика;dAth,s - теоретическая погрешность определения азимута А из-за погрешности датчика;dAth,g - теоретическая погрешность определения азимута А из-за геомагнитных отклонений. В следующей стадии неоткорректированные данные по гравитационным полям, полученные путем измерений, корректируются с учетом магнитных помех в осевом направлении и в направлении поперек оси, а также с учетом несоосности инструмента. Соответствующий способ коррекции приведен в патенте ЕР-В 0193230, в котором используются в качестве входных данных ожидаемое локальное значение напряженности магнитного поля, а также значение угла магнитного склонения, а выходные данные выдаются в виде скорректированных величин напряженности гравитационного поля,напряженности магнитного поля и угла магнитного склонения. Эти скорректированные величины параметров поля земли сравнивают с известными локальными значениями, и для каждого параметра определяется разница между расчетным и известным значениями. Предварительную оценку качества обследования проводят путем сравнения разницы между скорректированными измеренными величинами и известными величинами параметров поля земли G, В и D с погрешностями измерения, описанными выше. Для обеспечения приемлемого качества обследования указанная разница не должна превышать величину погрешности измерения. На фиг. 2, 3 и 4 показаны примерные результаты обследования скважины. На фиг. 2 представлен график изменения разницы Gm между скорректированным значением и известным значением G по глубине скважины. На фиг. 3 представлен график изменения разницы Bm между скорректированным значением и известным значением В по глубине скважины. На фиг. 4 представлен график изменения разницы Dm между скорректированным значением и известным значением D по глубине скважины. Погрешности измерения параметров поля земли в данном примере следующие: погрешность G = dG = 0,0023 g (g - ускорение свободного падения); погрешность В = dB = 0,25 Т; погрешность D = dD = 0,25 град. Эти погрешности измерения представлены на графиках в виде верхней и нижней границ 10,12 для G, в виде верхней и нижней границ 14, 16 для В и в виде верхней и нижней границ 18, 20 для D. Как видно на графиках, все значения 5 границ соответствующих погрешностей измерения, следовательно, эти величины считаются приемлемыми. Для определения погрешности параметров положения I и А, которые получаются из измеренных параметров поля земли G, В и D, сначала определяются следующие отношения:Dm/dDth,g где Gm - разница между скорректированной измеренной величиной и известной величинойBm - разница между скорректированной измеренной величиной и известной величиной В;Dm - разница между скорректированной измеренной величиной и известной величинойD. Для подсчета погрешности измерения угла наклона принимаем, что представленное выше отношение для напряженности гравитационного поля Gm/dGth,s представляет собой уровень от всех источников погрешности, дающих вклад в погрешность определения угла наклона. Если,например, на некоторой позиции обследования в буровой колонне это отношение равно 0,85, то считается, что все датчики в буровой колонне имеют погрешность на уровне 0,85 от dIth,s. Следовательно погрешности измерения наклона для всех позиций обследования в буровой колонне определяются:Im = абс[(Gm/dGth,s) dIth,s],где Im - измеренная погрешность наклона из-за погрешности датчика. Погрешность измерения азимута определяется аналогичным образом, однако два источника погрешности (датчик и геомагнитный источник) могут давать свой вклад в погрешность определения азимута. Для каждого источника выводятся два отношения, а именно для напряженности магнитного поля и для угла магнитного склонения, в результате чего имеют место четыре погрешности измерения азимута:Am берется по максимуму из этих значений, а именно:Am = mах [As,B; As,D; Ag,B; Ag,D] Из погрешностей измерения наклона и азимута можно выявить погрешности бокового направления, а также положения по линии вверх. Эти погрешности положения обычно определяют с использованием ковариантного приближения. Для упрощения можно применить следующий более краткий способ:UPUi = UPUi-1 + (AHDi - AHDi-1) (Iim + Ii+1m)/2, в котором LPUi = погрешность бокового положения в месте i,AHDi = глубина скважины в месте i,Aim = погрешность измерения азимута в месте iIim = погрешность измерения наклона в месте iUPUi = погрешность измерения положения по линии вверх в месте i. Таким образом определяются погрешности боковых положений и погрешности восходящих положений (по линии вверх), а затем их сравнивают с теоретическими значениями погрешностей определения боковых и восходящих положений (полученных из теоретических погрешностей значений наклона и азимута), выдавая информацию о качестве обследования скважины. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ оценки результатов обследования скважины, пробуренной в земной формации, согласно которому в буровую колонну вводят датчик, содержащий, по меньшей мере, один магнитометр и, по меньшей мере, один акселерометр и измеряют параметр поля земли и параметр положения, выбранный из наклона скважины и азимута скважины, после чего определяют разницу между значением измеренного параметра поля земли и известной величиной параметра поля земли, а также находят отношение этой разницы к теоретической погрешности измерения параметра поля земли и погрешность измеренного параметра положения. 2. Способ по п.1, в котором датчик содержит три магнитометра и три акселерометра. 3. Способ по любому из пп.1, 2, в котором каждая стадия определения теоретических погрешностей измерения упомянутых параметров включает определение теоретических погрешностей измерения для группы датчиков, к которой относится выбранный датчик. 4. Способ по любому из пп.1-3, в котором упомянутые теоретические погрешности измерения основаны, по меньшей мере, на одной погрешности датчика и погрешности определения параметра поля земли. 5. Способ по любому из пп.1-4, также включающий отбрасывание результатов измерений, если упомянутое отношение превышает 1. 6. Способ по любому из пп.1-5, в котором упомянутый параметр положения выбирается из параметра наклона и азимута скважины. 7. Способ по п.6, в котором первый режим работы по параметру положения определяет наклон скважины, а режим по параметру поля земли определяет поле тяготения земли, теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности датчика. 8. Способ по пп.6, 7, в котором второй режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет напряженность магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности датчика. 9. Способ по любому из пп.6-8, в котором третий режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет напряженность магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности определения магнитного поля земли. 10. Способ по любому из пп.6-9, в котором четвертый режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет угол склоне 8 ния магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности датчика. 11. Способ по любому из пп.6-10, в котором пятый режим работы по параметру положения определяет азимут скважины, а режим по параметру поля земли определяет угол склонения магнитного поля земли, а теоретические погрешности определения параметра положения и параметра поля земли основаны на погрешности параметра поля земли. 12. Способ по любому из пп.8-11, в котором стадия определения погрешности параметра измерения положения включает определение максимального абсолютного значения погрешностей измерения параметров положения, проводимых на втором, третьем, четвертом и пятом режимах работы.
МПК / Метки
МПК: E21B 47/022
Метки: скважины, способ, оценки, обследования, результатов
Код ссылки
<a href="https://eas.patents.su/5-1224-sposob-ocenki-rezultatov-obsledovaniya-skvazhiny.html" rel="bookmark" title="База патентов Евразийского Союза">Способ оценки результатов обследования скважины</a>
Способ оценки порового объема формации, занятого углеводородом
Номер патента: 175
Опубликовано: 29.10.1998
Авторы: Тутуньян Пьер Назарет, Вайнгар Харольд Джей, Аккурт Ридван
МПК: G01V 3/32
Метки: порового, способ, оценки, углеводородом, формации, объема, занятого
Формула / Реферат:
1. Способ оценки порового объема формации, занятого углеводородной фазой или фазами с использованием инструмента ЯМР каротажа, отличающийся тем, что способ включает этапы: получения первой записи импульсов ЯМР формации, при этом первая запись ЯМР использует последовательность импульсов, включающую первоначальный 90° радиочастотный импульс, последующую серию 180° радиочастотных импульсов, начинающуюся через период времени tср1 после...
Способ сбора сигналов, представляющих параметры скважины и инструмент
Номер патента: 1091
Опубликовано: 30.10.2000
Авторы: Барретт Майкл Пол, Джардайн Стюарт Инглис, Шеппард Майкл Чарльз
МПК: E21B 23/00
Метки: сигналов, инструмент, сбора, скважины, представляющих, параметры, способ
Формула / Реферат:
1. Способ сбора сигналов, представляющих параметры скважины в стволе скважины в коллекторе углеводородов, отличающийся тем, что спускают в ствол скважины автономный блок, содержащий средства передвижения, обеспечивающие перемещение в стволе скважины, средства определения параметров скважины и логическое устройство для управления автономным блоком, которое может принимать решения, основываясь, по меньшей мере, на двух входных характеристиках, и...
Система управления газлифтной добычей нефти из нефтяной скважины
Номер патента: 484
Опубликовано: 26.08.1999
Авторы: Корннеф Питер, Дер Киндерен Вильхельмус Йоханес Годефридус Йозеф
МПК: E21B 43/12
Метки: нефти, добычей, скважины, система, газлифтной, управления, нефтяной
Формула / Реферат:
1. Система управления добычей сырой нефти через эксплуатационную трубу, которая проходит в скважину для газлифтной добычи нефти и в которую нагнетают газлифт в нисходящую скважину, причем система содержит регулируемый дроссель для регулирования потока сырой нефти через эксплуатационную трубу и модуль управления для динамического регулирования открывания дросселя, который использует давление, измеренное манометром в трубопроводе для нагнетания...
Анализ крови на соотношение активности фактора v для оценки вероятности заболевания тромбоэмболией
Номер патента: 673
Опубликовано: 28.02.2000
Авторы: Аркел Йэйл С., Ку Дехью Вэйн
МПК: G01N 33/86, C12Q 1/56
Метки: заболевания, анализ, крови, фактора, активности, тромбоэмболией, вероятности, соотношение, оценки
Формула / Реферат:
1. Способ идентификации субъектов с риском тромботических нарушений вследствие дефекта фактора V, включающий a) инкубацию анализируемой плазмы с первым реагентом, содержащим фосфолипидную композицию и контактный активатор; b) добавление второго реагента, содержащего активированный белок С, к первой аликвоте анализируемой плазмы и инкубации первой аликвоты и второй аликвоты; и c) измерение активности фактора V плазмы в первой аликвоте и во...
Способ улучшения свойств жидкости для бурения скважин, способ улучшения смазывающих свойств буровой жидкости для бурения скважин, способ снижения вращающего момента и гидродинамического сопротивленияпри вращении, поднятии или опускании бурильной трубы, способ контролирования потерь буровой жидкости из нефтяной нисходящей буровой скважины
Номер патента: 357
Опубликовано: 24.06.1999
Авторы: Уейнтритт Дональд Дж., Рассел Джордж У., Деруин Дэвид Дж., Залески Питер Л.
МПК: C09K 7/02
Метки: трубы, скважин, бурильной, нефтяной, способ, контролирования, опускании, жидкости, вращающего, свойств, буровой, вращении, момента, нисходящей, сопротивленияпри, поднятии, гидродинамического, смазывающих, скважины, потерь, снижения, улучшения, бурения
Формула / Реферат:
1. Способ улучшения свойств жидкости для бурения скважин, отличающийся тем, что он включает стадию добавления в буровую жидкость упругих частиц углерода в виде графита. 2. Способ по п.1, отличающийся тем, что названные упругие частицы имеют упругое восстановление после деформации сжатия под давлением 68948 кПа свыше около 35%. 3. Способ по п.2, отличающийся тем, что названные упругие частицы имеют упругое восстановление после деформации сжатия...
Предыдущий патент: Пестицидные трис-оксимино гетероциклические соединения
Следующий патент: Фунгицидные смеси.