Способ сбора сигналов, представляющих параметры скважины и инструмент
Номер патента: 1091
Опубликовано: 30.10.2000
Авторы: Шеппард Майкл Чарльз, Джардайн Стюарт Инглис, Барретт Майкл Пол
Формула / Реферат
1. Способ сбора сигналов, представляющих параметры скважины в стволе скважины в коллекторе углеводородов, отличающийся тем, что спускают в ствол скважины автономный блок, содержащий средства передвижения, обеспечивающие перемещение в стволе скважины, средства определения параметров скважины и логическое устройство для управления автономным блоком, которое может принимать решения, основываясь, по меньшей мере, на двух входных характеристиках, и приводят в действие средства передвижения и средства определения параметров для проведения измерений параметров скважины, по меньшей мере, на одном участке ствола скважины.
2. Способ по п.1, отличающийся тем, что при спуске в скважину прикрепляют автономный блок к блоку картонажного кабеля с возможностью отсоединения от него и повторного с ним соединения.
3. Способ по п.1, отличающийся тем, что осуществляют сбор сигналов в горизонтальных стволах скважин или стволах скважин, расположенных под большим углом.
4. Скважинный инструмент для определения параметров в стволе скважины в коллекторе углеводородов, отличающийся тем, что содержит автономный блок, имеющий средства передвижения в стволе скважины, средства определения параметров скважины и логическое устройство управления автономным блоком, способное принимать решения на основе, по меньшей мере, двух входных характеристик.
5. Скважинный инструмент по п.4, отличающийся тем, что выполнен с возможностью обеспечения при его движении области в форме кольца между внешним корпусом автономного блока и стенкой ствола скважины.
6. Скважинный инструмент по п.4, отличающийся тем, что он снабжен сбрасываемыми балластными средствами для управления плавучестью автономного блока.
7. Скважинный инструмент по п.4, отличающийся тем, что дополнительно содержит соединенный с поверхностью блок каротажного кабеля и соединительное средство для обеспечения разъединения и повторного соединения блока каротажного кабеля и автономного блока.
8. Скважинный инструмент по п.6, отличающийся тем, что соединительное средство содержит узел привода с двигателем для замыкания и/или размыкания соединения.
9. Скважинный инструмент по п.4, отличающийся тем, что автономный блок содержит средство выработки электроэнергии в стволе скважины.
10. Скважинный инструмент по п.9, отличающийся тем, что средство выработки электроэнергии представляет собой турбину, взаимодействующую с потоком, проходящим в стволе скважины.
11. Скважинный инструмент по п.4, отличающийся тем, что средства передвижения выбраны из группы, включающей в себя гусеничные треки, ноги, воздушный винт, колеса или сочетание этих элементов.
12. Скважинный инструмент по п.4, отличающийся тем, что автономный блок дополнительно содержит складной парашют, способствующий движению в направлении потока в стволе скважины.
13. Скважинный инструмент по п.4, отличающийся тем, что автономный блок дополнительно содержит средство телеметрии для сигналов связи.
14. Скважинный инструмент по п.13, отличающийся тем, что средство телеметрии содержит средство передачи акустической энергии в окружающей жидкости или в обсадной трубе.
15. Скважинный инструмент по п.4, отличающийся тем, что автономный блок дополнительно содержит видеосредство для сбора изображений в стволе скважины.
Текст
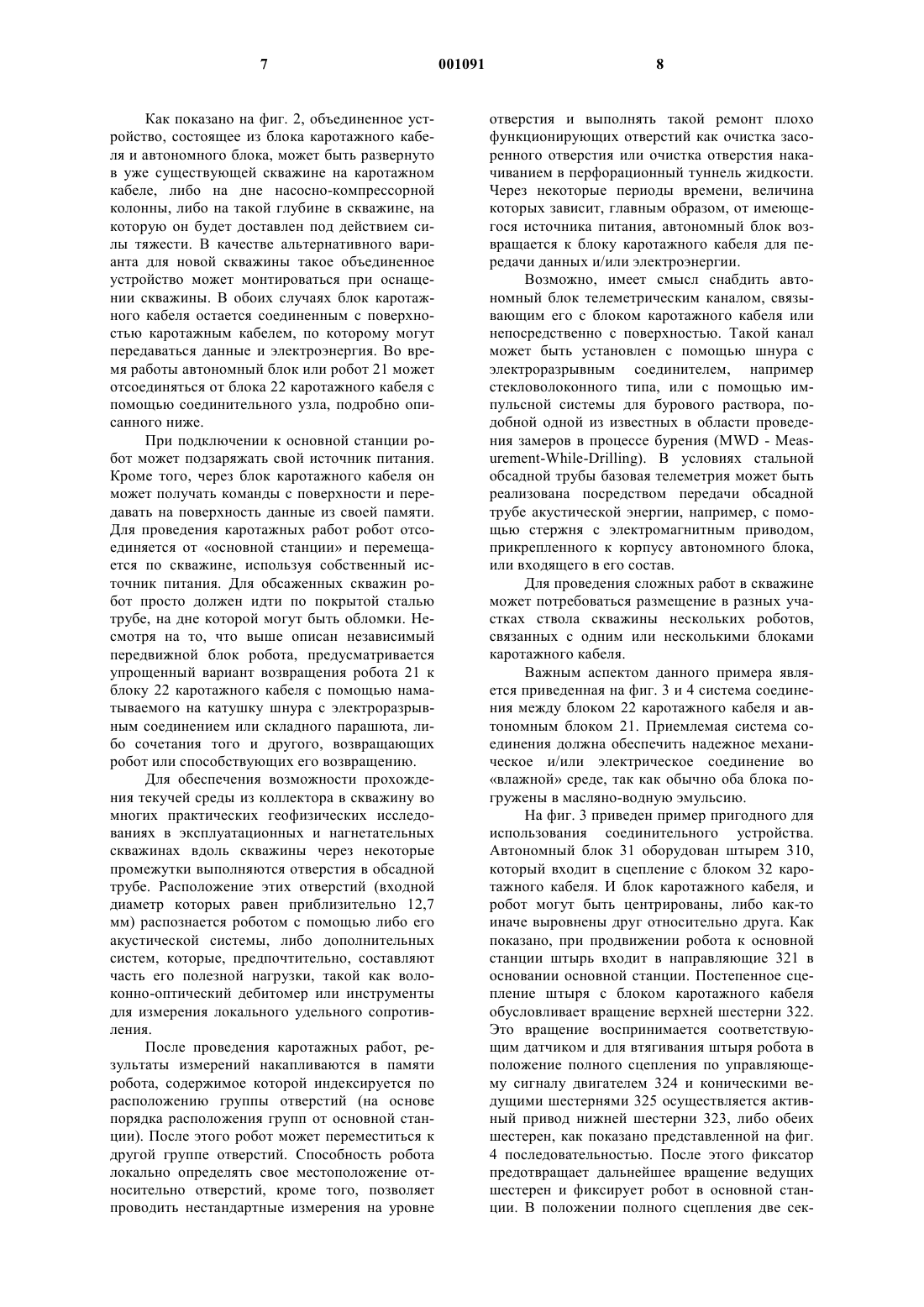
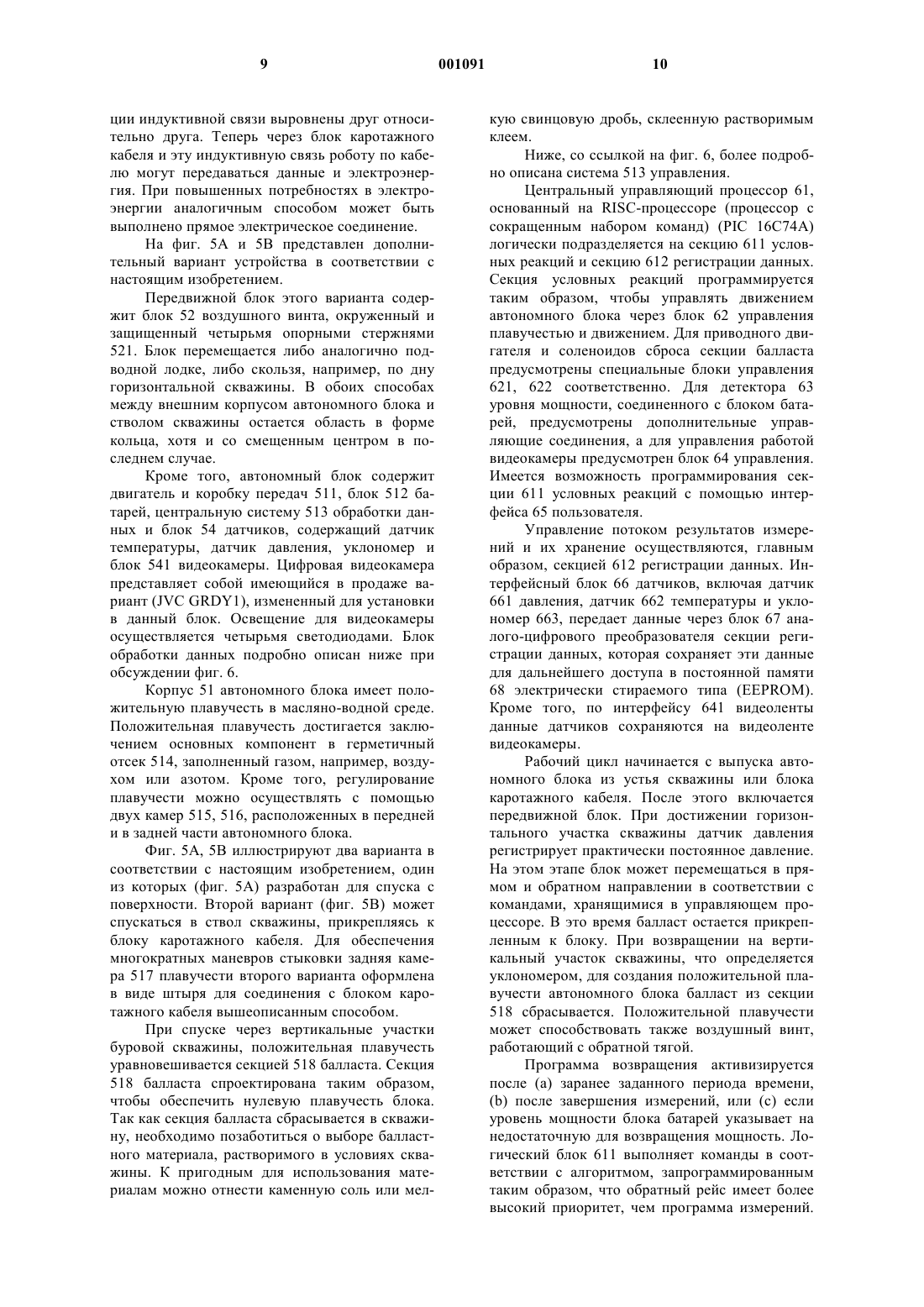
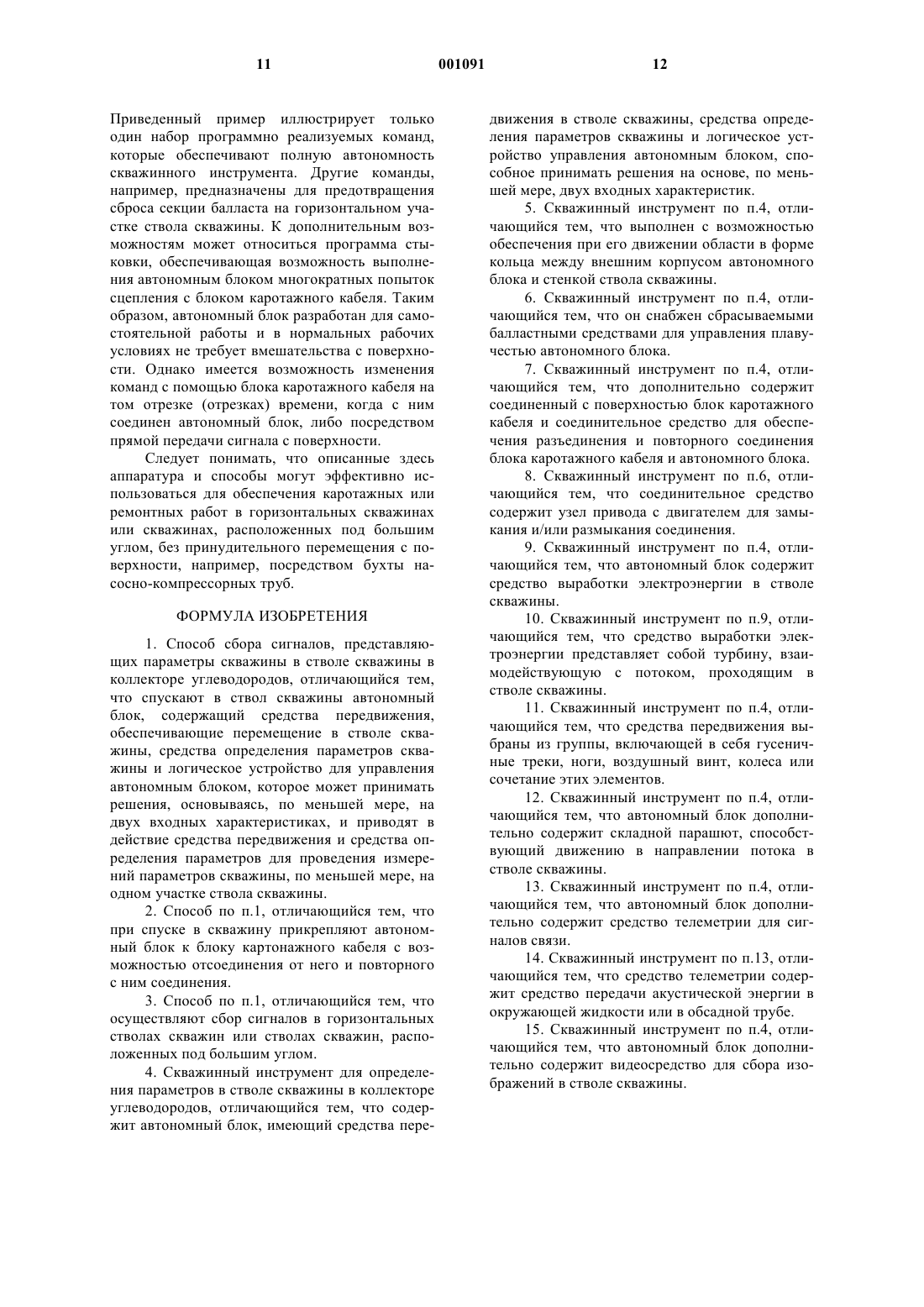
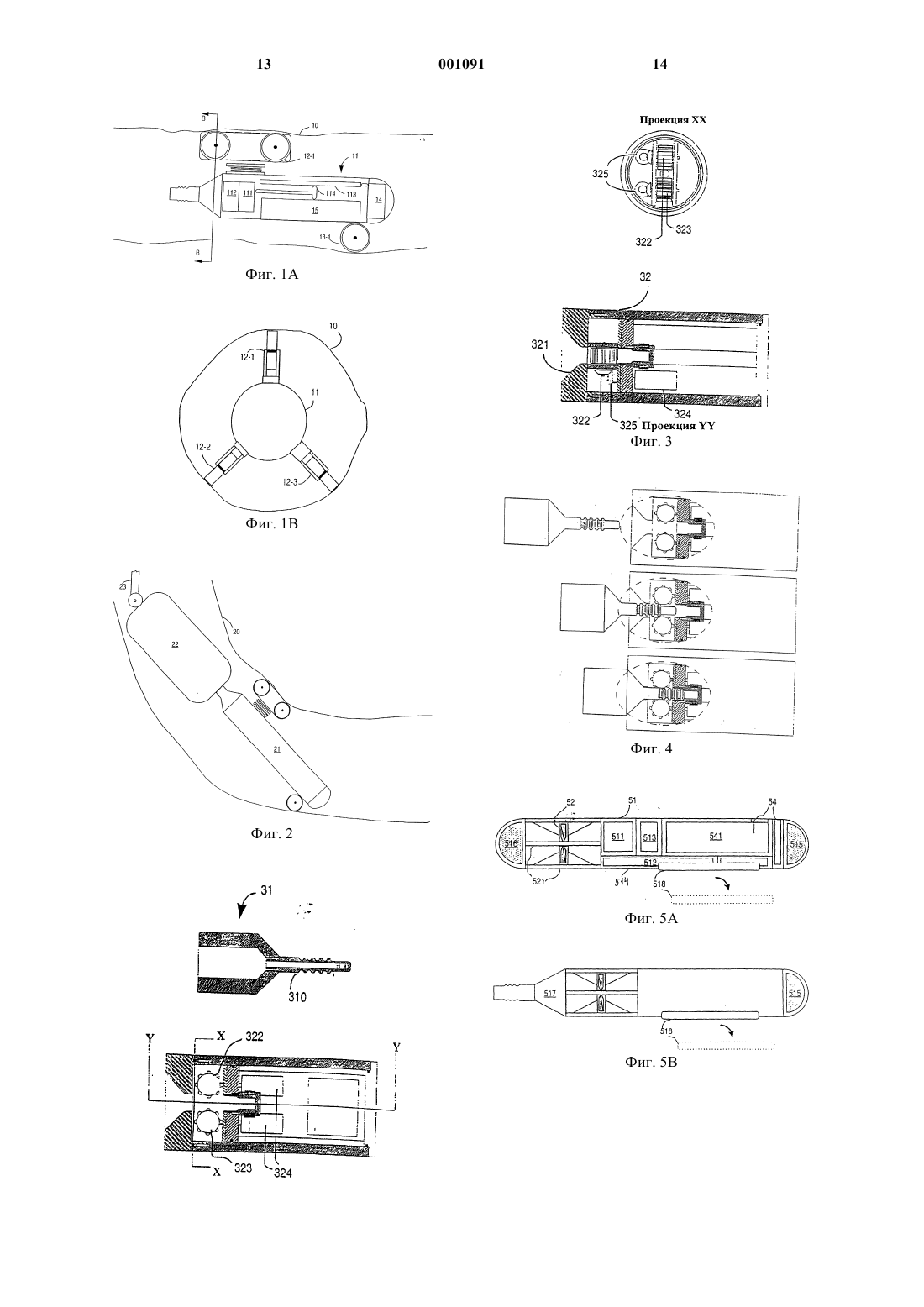
1 Настоящее изобретение относится к скважинным инструментам и способам для замера характеристик пласта и/или проведения технического контроля или обработки внутренней стенки или обсадной трубы ствола скважины. Точнее, оно относится к таким инструментам и способам для применения в горизонтальных скважинах или скважинах, расположенных под большим углом. Предпосылки создания настоящего изобретения С ростом количества не вертикальных буровых скважин для поиска и разработки продуктивных пластов углеводородов, современная промышленность испытывает потребность в каротажных инструментах, пригодных для работы в таких скважинах. В промышленности широко используются стандартные способы с применением кабеля. Основные элементы скважинных или каротажных инструментов описаны в ряде документов. Например, в патенте США 4860581 описан скважинный инструмент модульной конструкции, который может опускаться в скважину с помощью кабеля. Различные модули этого инструмента предоставляют средства для замера таких характеристик пласта как электрическое удельное сопротивление, плотность, пористость,проницаемость, акустические скорости, поглощение гамма-излучения, прочность пласта и ряд других характерных свойств. Другие модули этого инструмента представляют собой средства для определения характеристик потока в стволе скважины. Дополнительные модули включают в себя электрические и гидравлические источники энергии и двигатели для управления и включения датчиков и зондовых узлов. Как правило,сигналы управления, результаты измерений и электропитание передаются каротажному инструменту и от него по кабелю. Эти и другие каротажные инструменты хорошо известны в промышленности. Несмотря на широкое признание способов с применением кабеля и их рентабельность при применении для вертикальных скважин, по очевидным соображениям они неприменимы для горизонтальных скважин. В известном способе эта проблема преодолевается тем, что каротажный инструмент устанавливают в нижней части бурильной трубы или колонны насосно-компрессорных труб в бухтах и таким образом доставляют к требуемому участку скважины. Этот способ, однако, рассчитан на дорогое оборудование, которое необходимо развернуть и установить рядом со скважиной, что является трудоемкой операцией. Следовательно, промышленность неохотно применяет этот способ,получивший распространение, главным образом, благодаря отсутствию альтернативных вариантов. 2 В другой попытке преодолеть эту проблему предлагается объединить каротажный инструмент с устройством для протягивания каротажного кабеля через наклонные или горизонтальные участки ствола скважины. Краткое описание этих решений приведено в патенте США 4676310, касающемся разновидности каротажных устройств без использования кабеля. Бескабельные устройства, согласно патенту 4676310, включают в себя блок датчиков,аккумулятор, электронное устройство управления для сохранения результатов измерений во внутренней памяти. Передвижной блок этого устройства включает средства создания перепада давления в текучей среде, проходящей через данное устройство, и использование поршневого движения. Однако основным недостатком этого устройства является его ограниченная автономность в условиях скважины. Дополнительным ограничением является то, что для применяемого способа движения необходим плотный контакт с окружающим стволом скважины. Такой контакт сложно обеспечить, особенно в разделенных открытых скважинах. Для применения при проведении технического контроля нефтепроводов и канализационных коллекторов разработан ряд автономных транспортных средств, хотя и не относящихся к области техники настоящего изобретения. Например, в европейской заявке на патент ЕР-А 177122 и в Протоколах международной конференции Интеллектуальные роботы и системы Института инженеров по электротехнике и электронике (IEEE)/RSJ описан робот для проведения технического контроля и проверки внутренних частей трубопровода. Этот робот может перемещаться внутри труб, радиус которых находится в диапазоне от 520 до 800 мм. В патенте США 4860581 описан другой робот для работы внутри труб и буровых скважин, который включает в себя корпус, смонтированный на салазках с гидравлическим приводом. Принимая во внимание вышеупомянутые известные каротажные способы, целью настоящего изобретения является предоставление скважинного инструмента и способа, которые могут применяться, в частности, в горизонтальных скважинах или скважинах, меняющих направление. Краткое изложение настоящего изобретения Цель настоящего изобретения достигается способами и аппаратурой, как изложено в прилагаемых независимых пунктах изобретения. В состав автономного блока или робота в соответствии с настоящим изобретением входят опорная конструкция, блок питания и передвижной блок. Опорная конструкция используется для установки блоков датчиков, блоков для проведения ремонтных работ или им подобных. 3 Источник питания может быть пневматическим или гидравлическим. В предпочтительном варианте осуществления, однако, используется блок батарей, предпочтительно перезаряжаемых. Кроме того, автономный блок содержит логическое устройство, которое обеспечивает возможность автономного принятия решения данным инструментом на основе замеренных значений двух или более параметров. Логическое устройство, в типовом случае, представляет собой один или несколько программируемых микропроцессоров, соединенных с датчиками и приводами соответствующими интерфейсными системами. По сравнению с известными устройствами, такими как описанные в патенте США 4676310, данное устройство обеспечивает значительно более высокую степень автономности скважинного инструмента. Логическое устройство может программироваться как нейронная сеть или с использованием алгоритмов нечеткой логики, чтобы обеспечить возможность условно интеллектуальной работы в условиях скважины. Другой характерной особенностью является то, что усовершенствованный скважинный инструмент содержит передвижной блок, для которого необходима только ограниченная область контакта со стенкой ствола скважины. Данный блок разработан таким образом, что во время движения между внешним корпусом автономного блока и стенкой ствола скважины остается область в форме кольца, обеспечивающая прохождение текучей среды скважины между стенкой ствола скважины и внешним корпусом инструмента. Во время работы, например, при скольжении устройства по дну горизонтальной скважины, центр кольцевой области может быть смещен. По сравнению с устройством, описанным в патенте США 4676310,плотный контакт с окружающей стенкой не требуется. Следовательно, можно рассчитывать на работу такого усовершенствованного устройства не только в обсадной трубе, но и в условиях открытой скважины. Предпочтителен колесный или гусеничный передвижной блок. В другом варианте осуществления могут использоваться несколько или множество ног или салазок. Более предпочтительный вариант передвижного блока содержит,по меньшей мере, один воздушный винт, обеспечивающий возможность движения аналогично движению подводной лодки. В качестве альтернативного варианта в передвижном блоке может использоваться сочетание приводов, основанных на разных способах. К полезным в работе блокам датчиков относятся измерительные датчики, такие как механические, электрические или оптические дебитомеры, источники и приемники звуковой или акустической энергии, источники и приемники гамма-лучей, зонды локального сопротив 001091 4 ления или устройства сбора изображений, например, видеокамеры. В предпочтительном варианте осуществления робот оборудован измерительными и каротажными инструментами для идентификации расположения отверстий в скважине и выполнения каротажных измерений. В вариантах настоящего изобретения скважинный инструмент содержит автономный блок, соединенный с блоком каротажного кабеля, который, в свою очередь, выведен на поверхность. Блок каротажного кабеля может монтироваться на конце бурильной трубы или бухты насосно-компрессорных труб, однако, в предпочтительном варианте осуществления данный блок соединен с поверхностью гибким кабелем и опускается в буровую скважину под действием силы тяжести. В зависимости от назначения и конструкции автономного блока, соединение с блоком каротажного кабеля обеспечивает либо только механическое соединение для опускания инструмента в скважину или извлечения его из скважины, либо в предпочтительном варианте осуществления средства для передачи электроэнергии и/или управляющих и информационных сигналов между блоком каротажного кабеля и роботом. В последнем случае для такого соединения предпочтительна возможность многократного разъединения и повторного его соединения в условиях скважины, т.е. в условиях высокой температуры и погружения в поток жидкости/газа. В предпочтительном варианте осуществления система соединения содержит активный компонент для замыкания и/или размыкания соединения. Эти и другие особенности настоящего изобретения, предпочтительные варианты осуществления и их модификации, возможные области применения и преимущества станут ясны квалифицированным специалистам в данной области техники из приводимых ниже подробного описания и чертежей. Краткое описание чертежей Фиг. 1 А, 1 В изображает схематично продольное и поперечное сечения автономного блока скважинного инструмента в соответствии с настоящим изобретением; фиг. 2 - разворот скважинного инструмента с автономным блоком; фиг. 3, 4 - элементы соединительного узла скважинного инструмента в соответствии с настоящим изобретением; фиг. 5 А, 5 В - схематично продольные сечения автономного блока скважинного инструмента в соответствии с настоящим изобретением; фиг. 6 - основные компоненты электронной схемы управления для примера устройства,представленного на фиг. 5. 5 Способ (способы) осуществления настоящего изобретения Как показано на фиг. 1 А и 1 В автономный блок скважинного инструмента в соответствии с настоящим изобретением имеет корпус 11, который содержит узел 111 привода с электродвигателем, блок 112 батарей и встроенную систему 113 обработки данных. Блок батарей перезаряжается от ионно-литиевого аккумулятора для скважин с низкой температурой (60 С), а для скважин с высокой температурой (120 С) представляет собой неперезаряжаемую батарею. Автономный блок показан расположенным в буровой скважине 10. В некоторых случаях может потребоваться оснастить блок батарей дополнительными средствами выработки электроэнергии. Несмотря на то, что во многих случаях достаточно, возможно, предусмотреть шнур с электроразрывным соединителем между блоком каротажного кабеля и автономным блоком, в предпочтительном варианте осуществления настоящего изобретения в составе автономного блока предусматриваются средства выработки электроэнергии. Предпочтительным является извлечение энергии дополнительной системой выработки электроэнергии из окружающего потока текучей среды буровой скважины. Такая система может содержать турбину, которая, либо помещается в поток текучей среды при необходимости, т.е. при разряжении блока батарей, либо постоянно находится в потоке. Встроенная система обработки данных или логическое устройство содержит многопроцессорную систему (например, процессор Motorola 680 Х 0), которая осуществляет управление с помощью системы 114 информационной шины со схемами управления вводом-выводом и сильноточным приводом передвижного блока и других дополнительных элементов обработки, приводов и датчиков. Кроме того, в состав встроенной системы обработки данных входит флэш-память для хранения данных, полученных в одном цикле разведки автономного блока. В качестве альтернативного варианта память для хранения данных может быть реализована с помощью имеющихся в продаже миниатюрных накопителей на жестких дисках диаметром менее 4 см или стандартных модулей памяти DRAM (динамическая память с произвольным доступом),SRAM (статическая память с произвольным доступом) или (E)EPROM электрически) стираемая программируемая постоянная память). Все электронное оборудование выбирается для эксплуатации при температуре до 120 С и выше. Для скважин с высокой температурой для защиты таких термочувствительных элементов как батарея или электронные устройства предполагается использовать сосуд Дьюара. Передвижной блок содержит заднюю секцию 12 гусеничного хода и переднюю секцию 13 колесного хода. Как показано на фиг. 1 В, по 6 внешней окружности корпуса через 120 расположены три гусеничных трака 12-1, 12-2, 12-3. Три колеса 13-1, 13-2, 13-3 располагаются со сдвигом на 60 относительно гусеничных траков. Изменение направления движения на противоположное осуществляется вращением гусеничных траков в противоположном направлении. Управление направлением движения и движением в значительной мере упрощено в силу однонаправленности пути. Гусеничные траки и колеса выполнены на подвесках, чтобы сгладить неровности буровой скважины. Передвижной блок может быть заменен блоком полностью на колесном или полностью на гусеничном ходу. Кроме того, возможно применение хорошо известных в данной области техники шагающих механизмов. Гусеничные траки или другие рассматриваемые здесь средства передвижения отличаются тем, что имеют ограниченную область контакта со стенкой ствола скважины. Следовательно, при движении между внешним корпусом автономного блока и стенкой ствола скважины остается область в форме кольца для прохождения текучей среды скважины. Частью корпуса автономного блока является также акустическая измерительная система 14, испускающая и принимающая ультразвуковую энергию. Во время работы акустическая система используется для опознавания специфических особенностей окружающего пласта,например, отверстий в обсадной трубе скважины. Кроме того, автономное средство передвижения содержит отсек 15 для установки специального оборудования, в зависимости от выполняемой задачи, такого как дебитомер или прибор для измерения удельного сопротивления. В предпочтительном варианте осуществления специальное для данной задачи оборудование разработано с общим интерфейсом с системой обработки данных автономного блока. Следует принять во внимание, что к специальному для данной задачи оборудованию могут относиться любые известные каротажные инструменты, инструменты для проведения ремонтных работ и им подобные, в предположении, что форма этого оборудования и его системы управления могут быть согласованы с имеющимся отсеком. Считается, что в большинстве случаев такое согласование известного инструмента вполне осуществимо специалистом средней квалификации. На фиг. 2 приведен описанный выше автономный блок 21, прикрепленный к блоку 22 каротажного кабеля и спускаемый в ствол скважины 20 под действием силы тяжести. Блок каротажного кабеля связан с поверхностью кабелем 23. В соответствии со стандартными способами кабель 23 используется для передачи данных, сигналов и/или электроэнергии блоку 22 каротажного кабеля или от него. 7 Как показано на фиг. 2, объединенное устройство, состоящее из блока каротажного кабеля и автономного блока, может быть развернуто в уже существующей скважине на каротажном кабеле, либо на дне насосно-компрессорной колонны, либо на такой глубине в скважине, на которую он будет доставлен под действием силы тяжести. В качестве альтернативного варианта для новой скважины такое объединенное устройство может монтироваться при оснащении скважины. В обоих случаях блок каротажного кабеля остается соединенным с поверхностью каротажным кабелем, по которому могут передаваться данные и электроэнергия. Во время работы автономный блок или робот 21 может отсоединяться от блока 22 каротажного кабеля с помощью соединительного узла, подробно описанного ниже. При подключении к основной станции робот может подзаряжать свой источник питания. Кроме того, через блок каротажного кабеля он может получать команды с поверхности и передавать на поверхность данные из своей памяти. Для проведения каротажных работ робот отсоединяется от основной станции и перемещается по скважине, используя собственный источник питания. Для обсаженных скважин робот просто должен идти по покрытой сталью трубе, на дне которой могут быть обломки. Несмотря на то, что выше описан независимый передвижной блок робота, предусматривается упрощенный вариант возвращения робота 21 к блоку 22 каротажного кабеля с помощью наматываемого на катушку шнура с электроразрывным соединением или складного парашюта, либо сочетания того и другого, возвращающих робот или способствующих его возвращению. Для обеспечения возможности прохождения текучей среды из коллектора в скважину во многих практических геофизических исследованиях в эксплуатационных и нагнетательных скважинах вдоль скважины через некоторые промежутки выполняются отверстия в обсадной трубе. Расположение этих отверстий (входной диаметр которых равен приблизительно 12,7 мм) распознается роботом с помощью либо его акустической системы, либо дополнительных систем, которые, предпочтительно, составляют часть его полезной нагрузки, такой как волоконно-оптический дебитомер или инструменты для измерения локального удельного сопротивления. После проведения каротажных работ, результаты измерений накапливаются в памяти робота, содержимое которой индексируется по расположению группы отверстий (на основе порядка расположения групп от основной станции). После этого робот может переместиться к другой группе отверстий. Способность робота локально определять свое местоположение относительно отверстий, кроме того, позволяет проводить нестандартные измерения на уровне 8 отверстия и выполнять такой ремонт плохо функционирующих отверстий как очистка засоренного отверстия или очистка отверстия накачиванием в перфорационный туннель жидкости. Через некоторые периоды времени, величина которых зависит, главным образом, от имеющегося источника питания, автономный блок возвращается к блоку каротажного кабеля для передачи данных и/или электроэнергии. Возможно, имеет смысл снабдить автономный блок телеметрическим каналом, связывающим его с блоком каротажного кабеля или непосредственно с поверхностью. Такой канал может быть установлен с помощью шнура с электроразрывным соединителем, например стекловолоконного типа, или с помощью импульсной системы для бурового раствора, подобной одной из известных в области проведения замеров в процессе бурения (MWD - Measurement-While-Drilling). В условиях стальной обсадной трубы базовая телеметрия может быть реализована посредством передачи обсадной трубе акустической энергии, например, с помощью стержня с электромагнитным приводом,прикрепленного к корпусу автономного блока,или входящего в его состав. Для проведения сложных работ в скважине может потребоваться размещение в разных участках ствола скважины нескольких роботов,связанных с одним или несколькими блоками каротажного кабеля. Важным аспектом данного примера является приведенная на фиг. 3 и 4 система соединения между блоком 22 каротажного кабеля и автономным блоком 21. Приемлемая система соединения должна обеспечить надежное механическое и/или электрическое соединение во влажной среде, так как обычно оба блока погружены в масляно-водную эмульсию. На фиг. 3 приведен пример пригодного для использования соединительного устройства. Автономный блок 31 оборудован штырем 310,который входит в сцепление с блоком 32 каротажного кабеля. И блок каротажного кабеля, и робот могут быть центрированы, либо как-то иначе выровнены друг относительно друга. Как показано, при продвижении робота к основной станции штырь входит в направляющие 321 в основании основной станции. Постепенное сцепление штыря с блоком каротажного кабеля обусловливает вращение верхней шестерни 322. Это вращение воспринимается соответствующим датчиком и для втягивания штыря робота в положение полного сцепления по управляющему сигналу двигателем 324 и коническими ведущими шестернями 325 осуществляется активный привод нижней шестерни 323, либо обеих шестерен, как показано представленной на фиг. 4 последовательностью. После этого фиксатор предотвращает дальнейшее вращение ведущих шестерен и фиксирует робот в основной станции. В положении полного сцепления две сек 9 ции индуктивной связи выровнены друг относительно друга. Теперь через блок каротажного кабеля и эту индуктивную связь роботу по кабелю могут передаваться данные и электроэнергия. При повышенных потребностях в электроэнергии аналогичным способом может быть выполнено прямое электрическое соединение. На фиг. 5 А и 5 В представлен дополнительный вариант устройства в соответствии с настоящим изобретением. Передвижной блок этого варианта содержит блок 52 воздушного винта, окруженный и защищенный четырьмя опорными стержнями 521. Блок перемещается либо аналогично подводной лодке, либо скользя, например, по дну горизонтальной скважины. В обоих способах между внешним корпусом автономного блока и стволом скважины остается область в форме кольца, хотя и со смещенным центром в последнем случае. Кроме того, автономный блок содержит двигатель и коробку передач 511, блок 512 батарей, центральную систему 513 обработки данных и блок 54 датчиков, содержащий датчик температуры, датчик давления, уклономер и блок 541 видеокамеры. Цифровая видеокамера представляет собой имеющийся в продаже вариант (JVC GRDY1), измененный для установки в данный блок. Освещение для видеокамеры осуществляется четырьмя светодиодами. Блок обработки данных подробно описан ниже при обсуждении фиг. 6. Корпус 51 автономного блока имеет положительную плавучесть в масляно-водной среде. Положительная плавучесть достигается заключением основных компонент в герметичный отсек 514, заполненный газом, например, воздухом или азотом. Кроме того, регулирование плавучести можно осуществлять с помощью двух камер 515, 516, расположенных в передней и в задней части автономного блока. Фиг. 5 А, 5 В иллюстрируют два варианта в соответствии с настоящим изобретением, один из которых (фиг. 5 А) разработан для спуска с поверхности. Второй вариант (фиг. 5 В) может спускаться в ствол скважины, прикрепляясь к блоку каротажного кабеля. Для обеспечения многократных маневров стыковки задняя камера 517 плавучести второго варианта оформлена в виде штыря для соединения с блоком каротажного кабеля вышеописанным способом. При спуске через вертикальные участки буровой скважины, положительная плавучесть уравновешивается секцией 518 балласта. Секция 518 балласта спроектирована таким образом,чтобы обеспечить нулевую плавучесть блока. Так как секция балласта сбрасывается в скважину, необходимо позаботиться о выборе балластного материала, растворимого в условиях скважины. К пригодным для использования материалам можно отнести каменную соль или мел 001091 10 кую свинцовую дробь, склеенную растворимым клеем. Ниже, со ссылкой на фиг. 6, более подробно описана система 513 управления. Центральный управляющий процессор 61,основанный на RISC-процессоре (процессор с сокращенным набором команд) (PIC 16C74A) логически подразделяется на секцию 611 условных реакций и секцию 612 регистрации данных. Секция условных реакций программируется таким образом, чтобы управлять движением автономного блока через блок 62 управления плавучестью и движением. Для приводного двигателя и соленоидов сброса секции балласта предусмотрены специальные блоки управления 621, 622 соответственно. Для детектора 63 уровня мощности, соединенного с блоком батарей, предусмотрены дополнительные управляющие соединения, а для управления работой видеокамеры предусмотрен блок 64 управления. Имеется возможность программирования секции 611 условных реакций с помощью интерфейса 65 пользователя. Управление потоком результатов измерений и их хранение осуществляются, главным образом, секцией 612 регистрации данных. Интерфейсный блок 66 датчиков, включая датчик 661 давления, датчик 662 температуры и уклономер 663, передает данные через блок 67 аналого-цифрового преобразователя секции регистрации данных, которая сохраняет эти данные для дальнейшего доступа в постоянной памяти 68 электрически стираемого типа (EEPROM). Кроме того, по интерфейсу 641 видеоленты данные датчиков сохраняются на видеоленте видеокамеры. Рабочий цикл начинается с выпуска автономного блока из устья скважины или блока каротажного кабеля. После этого включается передвижной блок. При достижении горизонтального участка скважины датчик давления регистрирует практически постоянное давление. На этом этапе блок может перемещаться в прямом и обратном направлении в соответствии с командами, хранящимися в управляющем процессоре. В это время балласт остается прикрепленным к блоку. При возвращении на вертикальный участок скважины, что определяется уклономером, для создания положительной плавучести автономного блока балласт из секции 518 сбрасывается. Положительной плавучести может способствовать также воздушный винт,работающий с обратной тягой. Программа возвращения активизируется после (а) заранее заданного периода времени,(b) после завершения измерений, или (с) если уровень мощности блока батарей указывает на недостаточную для возвращения мощность. Логический блок 611 выполняет команды в соответствии с алгоритмом, запрограммированным таким образом, что обратный рейс имеет более высокий приоритет, чем программа измерений. 11 Приведенный пример иллюстрирует только один набор программно реализуемых команд,которые обеспечивают полную автономность скважинного инструмента. Другие команды,например, предназначены для предотвращения сброса секции балласта на горизонтальном участке ствола скважины. К дополнительным возможностям может относиться программа стыковки, обеспечивающая возможность выполнения автономным блоком многократных попыток сцепления с блоком каротажного кабеля. Таким образом, автономный блок разработан для самостоятельной работы и в нормальных рабочих условиях не требует вмешательства с поверхности. Однако имеется возможность изменения команд с помощью блока каротажного кабеля на том отрезке (отрезках) времени, когда с ним соединен автономный блок, либо посредством прямой передачи сигнала с поверхности. Следует понимать, что описанные здесь аппаратура и способы могут эффективно использоваться для обеспечения каротажных или ремонтных работ в горизонтальных скважинах или скважинах, расположенных под большим углом, без принудительного перемещения с поверхности, например, посредством бухты насосно-компрессорных труб. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ сбора сигналов, представляющих параметры скважины в стволе скважины в коллекторе углеводородов, отличающийся тем,что спускают в ствол скважины автономный блок, содержащий средства передвижения,обеспечивающие перемещение в стволе скважины, средства определения параметров скважины и логическое устройство для управления автономным блоком, которое может принимать решения, основываясь, по меньшей мере, на двух входных характеристиках, и приводят в действие средства передвижения и средства определения параметров для проведения измерений параметров скважины, по меньшей мере, на одном участке ствола скважины. 2. Способ по п.1, отличающийся тем, что при спуске в скважину прикрепляют автономный блок к блоку картонажного кабеля с возможностью отсоединения от него и повторного с ним соединения. 3. Способ по п.1, отличающийся тем, что осуществляют сбор сигналов в горизонтальных стволах скважин или стволах скважин, расположенных под большим углом. 4. Скважинный инструмент для определения параметров в стволе скважины в коллекторе углеводородов, отличающийся тем, что содержит автономный блок, имеющий средства пере 001091 12 движения в стволе скважины, средства определения параметров скважины и логическое устройство управления автономным блоком, способное принимать решения на основе, по меньшей мере, двух входных характеристик. 5. Скважинный инструмент по п.4, отличающийся тем, что выполнен с возможностью обеспечения при его движении области в форме кольца между внешним корпусом автономного блока и стенкой ствола скважины. 6. Скважинный инструмент по п.4, отличающийся тем, что он снабжен сбрасываемыми балластными средствами для управления плавучестью автономного блока. 7. Скважинный инструмент по п.4, отличающийся тем, что дополнительно содержит соединенный с поверхностью блок каротажного кабеля и соединительное средство для обеспечения разъединения и повторного соединения блока каротажного кабеля и автономного блока. 8. Скважинный инструмент по п.6, отличающийся тем, что соединительное средство содержит узел привода с двигателем для замыкания и/или размыкания соединения. 9. Скважинный инструмент по п.4, отличающийся тем, что автономный блок содержит средство выработки электроэнергии в стволе скважины. 10. Скважинный инструмент по п.9, отличающийся тем, что средство выработки электроэнергии представляет собой турбину, взаимодействующую с потоком, проходящим в стволе скважины. 11. Скважинный инструмент по п.4, отличающийся тем, что средства передвижения выбраны из группы, включающей в себя гусеничные треки, ноги, воздушный винт, колеса или сочетание этих элементов. 12. Скважинный инструмент по п.4, отличающийся тем, что автономный блок дополнительно содержит складной парашют, способствующий движению в направлении потока в стволе скважины. 13. Скважинный инструмент по п.4, отличающийся тем, что автономный блок дополнительно содержит средство телеметрии для сигналов связи. 14. Скважинный инструмент по п.13, отличающийся тем, что средство телеметрии содержит средство передачи акустической энергии в окружающей жидкости или в обсадной трубе. 15. Скважинный инструмент по п.4, отличающийся тем, что автономный блок дополнительно содержит видеосредство для сбора изображений в стволе скважины.
МПК / Метки
МПК: E21B 23/00
Метки: параметры, сигналов, сбора, инструмент, скважины, представляющих, способ
Код ссылки
<a href="https://eas.patents.su/9-1091-sposob-sbora-signalov-predstavlyayushhih-parametry-skvazhiny-i-instrument.html" rel="bookmark" title="База патентов Евразийского Союза">Способ сбора сигналов, представляющих параметры скважины и инструмент</a>
Способ обработки сигналов с широтно-импульсной модуляцией
Номер патента: 501
Опубликовано: 26.08.1999
Авторы: Бу Саада Жонни, Колиньон Филипп
МПК: H02M 1/12
Метки: сигналов, широтно-импульсной, обработки, способ, модуляцией
Формула / Реферат:
Способ обработки сигналов с широтно-импульсной модуляцией, предназначенных для преобразователя напряжения или управляемого по напряжению выпрямителя, включающего, по крайней мере, одну ветвь с, по крайней мере, одной парой соединенных последовательно ключей, причем этим преобразователем или выпрямителем управляют, по крайней мере, одним сигналом, имеющим последовательность состояний высокого уровня и состояний низкого уровня, которые получены с...
Способ многофункциональной интерактивной связи с передачей и приёмом сигналов с круговой/эллиптической поляризацией и система для его реализации
Номер патента: 444
Опубликовано: 26.08.1999
Автор: Вонг Томас Т.
МПК: H04B 7/10
Метки: система, передачей, интерактивной, многофункциональной, приёмом, связи, способ, реализации, поляризацией, сигналов
Формула / Реферат:
1. Способ связи с помощью электромагнитных волн, включающий следующие операции: -передают первую вращающуюся волну; -принимают первую вращающуюся волну, при этом составляющие первой вращающейся волны входят в первый канал (56) и второй канал (58); -выделяют первую вращающуюся волну, по меньшей мере, из одного первого канала (56) и второго канала (58), причем первый канал разделен на первичный тракт первого канала (56) и вторичный тракт (56')...
Входная ячейка переменного тока для цепей сбора данных
Номер патента: 206
Опубликовано: 24.12.1998
Авторы: Франкарт Жан-Пьер, Юссон Анри
МПК: H03K 19/007, B61L 1/20, G08B 29/16...
Метки: данных, входная, ячейка, тока, переменного, цепей, сбора
Формула / Реферат:
1. Входная ячейка переменного тока для цепей сбора данных, в частности для применения на железнодорожном транспорте, характеризующаяся тем, что она включает, по крайней мере, две линии (А и В) идентичных элементов, расположенных в противоположном направлении на двух линиях, причем линии расположены параллельно, каждая линия включает, по крайней мере, один диод Зенера (DZ1 или DZ2), оптоэлектронный ключ (U1 или U2), включающий светодиод, диод (D2...
Входная ячейка постоянного тока для цепей сбора данных
Номер патента: 205
Опубликовано: 24.12.1998
Авторы: Юссон Анри, Франкарт Жан-Пьер, Мёнье Пьер
МПК: B61L 1/20, G08B 29/16, H03K 19/007...
Метки: данных, входная, сбора, цепей, тока, постоянного, ячейка
Формула / Реферат:
1. Входная ячейка постоянного тока, предназначенная для цепей сбора данных, в частности для применения в железнодорожном транспорте, включающая две параллельные линии идентичных элементов, причем каждая линия элементов включает, по крайней мере, один диод Зенера (DZ1 или DZ2), коммутатор (SW1 или SW2), в предпочтительной реализации состоящий из оптоэлектронного ключа (U1 или U2), и включает резистивный элемент (R2 или R18), отличающаяся тем, что...
Система управления газлифтной добычей нефти из нефтяной скважины
Номер патента: 484
Опубликовано: 26.08.1999
Авторы: Дер Киндерен Вильхельмус Йоханес Годефридус Йозеф, Корннеф Питер
МПК: E21B 43/12
Метки: нефтяной, скважины, газлифтной, нефти, управления, добычей, система
Формула / Реферат:
1. Система управления добычей сырой нефти через эксплуатационную трубу, которая проходит в скважину для газлифтной добычи нефти и в которую нагнетают газлифт в нисходящую скважину, причем система содержит регулируемый дроссель для регулирования потока сырой нефти через эксплуатационную трубу и модуль управления для динамического регулирования открывания дросселя, который использует давление, измеренное манометром в трубопроводе для нагнетания...
Предыдущий патент: Источник бесперебойного питания.
Случайный патент: Устройство для измерения вылета телескопической стрелы грузоподъемной машины