Получение электроэнергии при помощи гироглайдера, устройство и способ управления
Формула / Реферат
1. Устройство для получения электроэнергии, содержащее
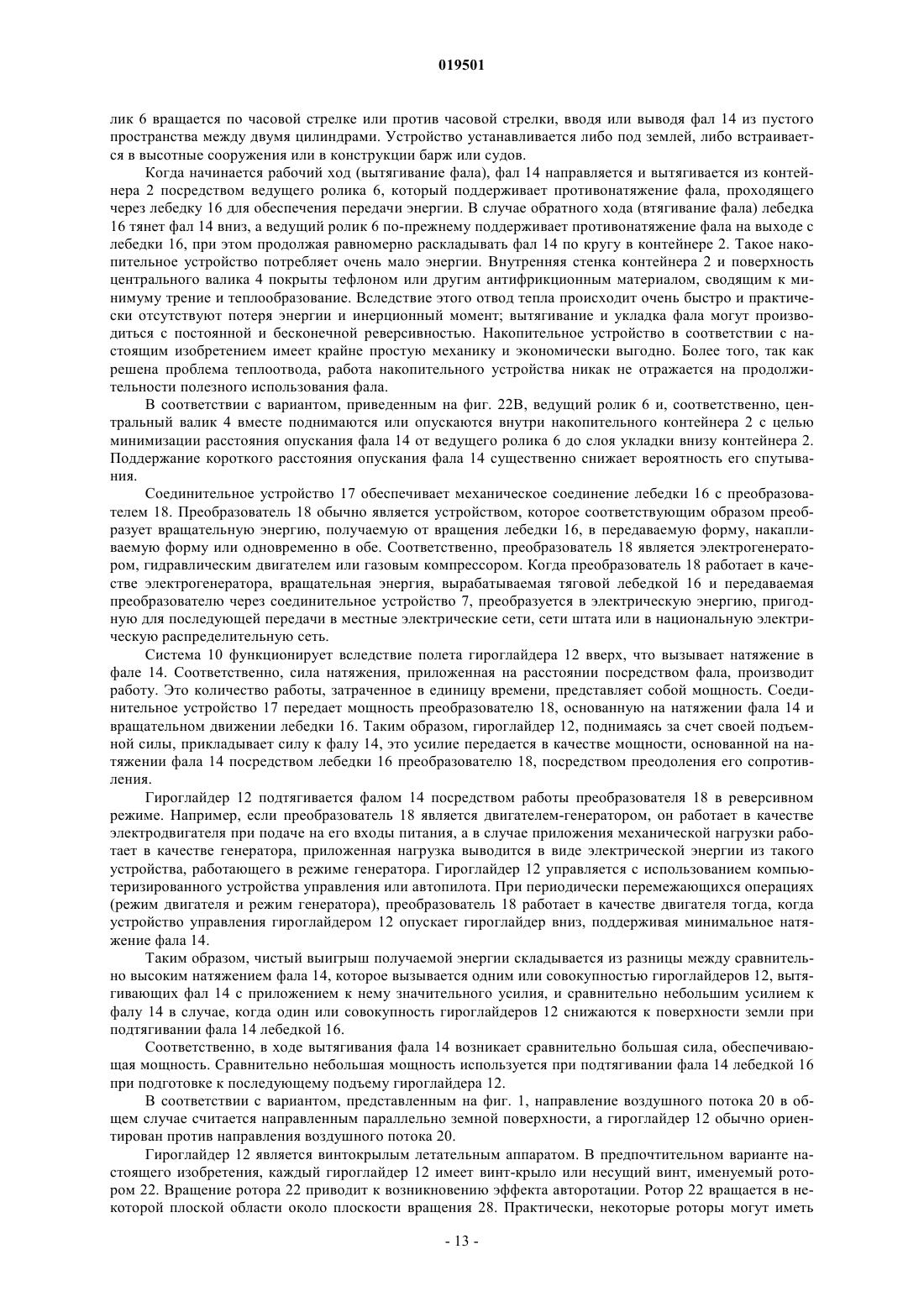
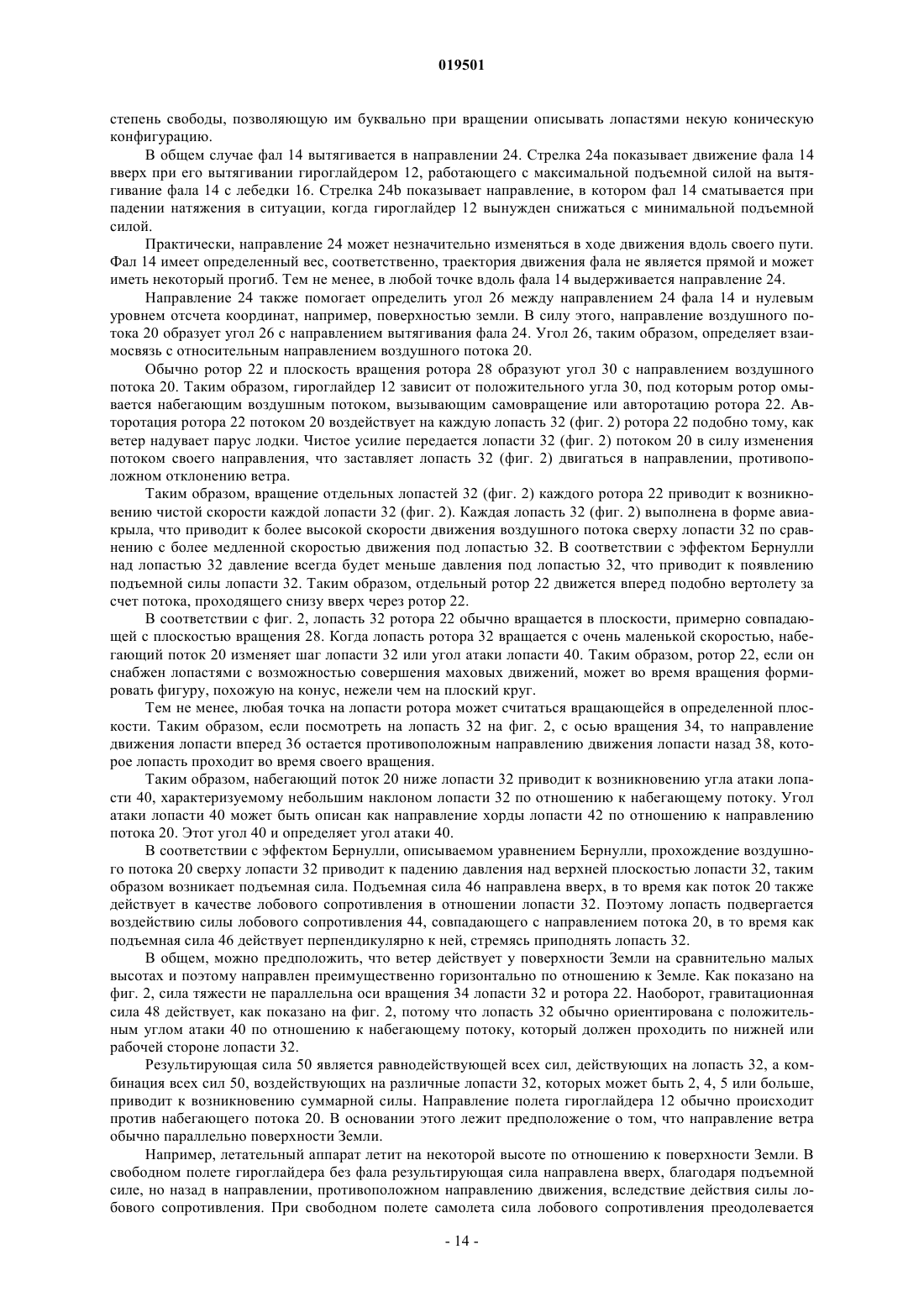
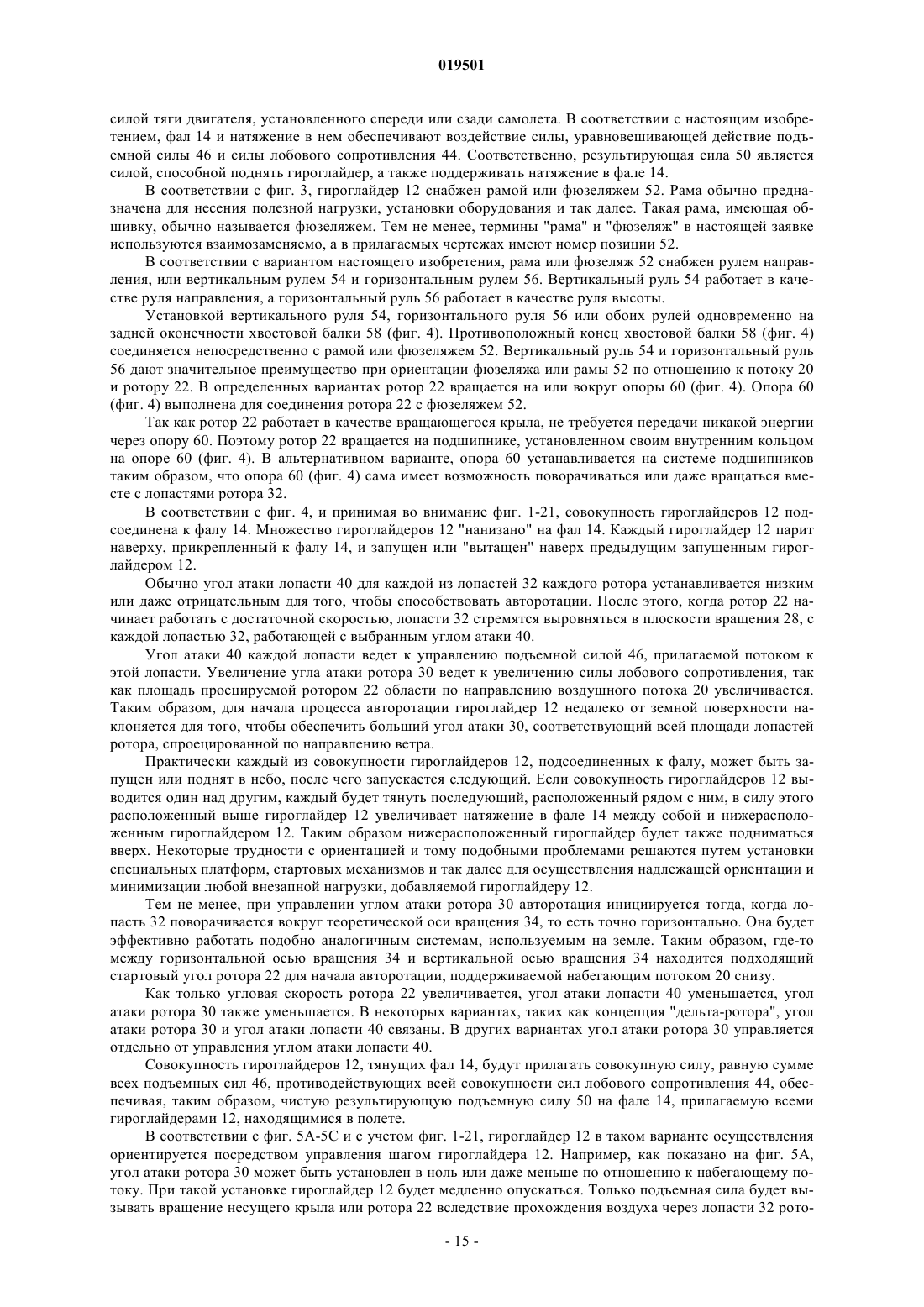
по меньшей мере один гироглайдер, содержащий подвижно закрепленный на раме ротор с совокупностью лопастей и снабженный по меньшей мере одним устройством управления шагом, выбранным из группы, состоящей из вертикального руля, горизонтального руля или обоих вертикального и горизонтального рулей, указанный ротор выполнен с возможностью вращения вокруг оси вращения для обеспечения подъемной силы указанного гироглайдера; указанный ротор имеет шаг ротора, характеризующийся положением ротора по отношению к набегающему воздушному потоку, и шаг лопасти, определяемый соответственно для каждой из лопастей углом наклона лопасти по отношению к набегающему воздушному потоку;
фал, имеющий первый конец и второй конец, первый конец расположен непосредственно на земле, второй конец вытягивается наверх, указанный фал выполнен для закрепления гироглайдера на указанном втором конце, указанный фал является по меньшей мере одним из компонентов или комбинации таковых, выбранного из группы, содержащей стальной трос, сплетенные из синтетических полимерных волокон канаты, канаты на основе сверхпрочных, сверхстойких термически и огнестойких волокон, канаты на основе углеродных нанотрубок;
устройство управления натяжением, предназначенное для управления натяжением указанного фала, содержащее
бортовой измеритель натяжения, предназначенный для измерения натяжения, существующего или дополнительно добавленного к фалу;
датчик скорости ветра, обеспечивающий определение скорости воздушного потока, воздействующего на указанный гироглайдер; и
контроллер, выполненный для получения данных от бортового измерителя натяжения и датчика скорости ветра и циклического контроля натяжения указанного фала; указанный контроллер выполнен для проверки соответствия данных, полученных от бортового измерителя натяжения, параметрам конфигурации указанных гироглайдера, ротора и лопастей, и последующего формирования выходного сигнала о состоянии указанного фала, указанный контроллер выбирается из группы, содержащей компьютеризированное устройство управления и автопилот;
первое управляющее устройство, выполненное для получения выходного сигнала о состоянии фала и селективного управления шагом ротора в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном;
второе управляющее устройство, выполненное для получения сигнала о состоянии фала и селективного управления шагом лопастей в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном;
тяговую лебедку, установленную непосредственно на поверхности, выбранной из земной поверхности и водной поверхности, указанная лебедка выполнена для получения выходного сигнала о состоянии фала, указанная лебедка выполнена для наматывания или разматывания фала в заранее установленном систематическом порядке в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном, фал наматывается непосредственно за указанный первый конец фала; указанная лебедка является по меньшей мере одним элементом, выбранным из группы, содержащей бобину, катушку и барабан;
преобразователь, выполненный для преобразования энергии вращения лебедки в электрическую энергию в форме, выбранной из группы, содержащей передаваемую, накапливаемую формы, и обе формы одновременно, передаваемую и накапливаемую, указанный преобразователь выбран из группы, содержащей электрогенератор, гидравлический двигатель, двигатель-генератор и газовый компрессор; и
соединительное устройство, выполненное для обеспечения соединения лебедки с преобразователем и дополнительно соединенное посредством муфты и маховика, указанные муфта и маховик выполнены для регулирования крутящего момента на входе указанного преобразователя.
2. Устройство по п.1, в котором ось вращения образована опорой, к которой прикреплен ротор.
3. Устройство по п.1, в котором указанный гироглайдер размещен на некотором расстоянии от другого гироглайдера в ряду гироглайдеров на фале в случае, когда используется более одного гироглайдера.
4. Устройство по п.1, в котором указанное первое управляющее устройство содержит по меньшей мере одно устройство, выбранное из группы, состоящей из
указанной рамы, содержащей направляющую, определяющую траекторию зубчатого колесика, управляемого сервоприводом, указанное зубчатое колесико перемещается по направляющей и выполнено для управления шагом ротора,
по меньшей мере двух регуляторов шага, перемещающихся по направляющим рамы, рама выполнена с углом расхождения боковой части, обеспечивающим заранее установленную длину направляющих между передней и задней частями рамы, направляющая рамы предопределяет заданную траекторию перемещения малого зубчатого колеса, малое зубчатое колесо перемещается по направляющей, направляющая выполнена для обеспечения перемещения малого зубчатого колеса вперед и назад по направляющей, направляющие выбраны из группы, включающей гладкую направляющую, секторное зубчатое колесо с внутренним зацеплением, гладкую направляющую из двух частей, передней и задней, с зоной фиксированного положения между передней и задней частями для обеспечения предпочтительного положения рамы, удерживаемой фалом, и зубчатую направляющую из двух частей, передней и задней, с зоной фиксированного положения между передней и задней частями для обеспечения предпочтительного положения рамы, удерживаемой фалом; и регулятора крена, перемещающегося по направляющей между регуляторами шага, левая и правая части рамы соединены между собой под углом, обеспечивающим заранее установленную длину направляющей;
поворотной платформы, выполненной для поворота относительно заранее определенной оси вращения на раме, платформа имеет передний торец и задний торец, отстоящие друг от друга на заранее определенном расстоянии, ось вращения платформы выполнена непосредственно в области переднего торца, платформа выполнена для совершения поворота своим задним торцом относительно оси вращения на раме и снабжена силовым упругим элементом, непосредственно соединенным с рамой, силовой упругий элемент выполнен для придания платформе определенного положения относительно рамы;
ротора, имеющего шарнирные соединения между втулкой ротора и лопастями, шарнирные соединения выполнены для соединения каждой лопасти с рукавом втулки ротора, при этом каждый рукав втулки жестко соединен с втулкой и вращается с ней заодно, комель каждой лопасти соединяется с каждым рукавом ротора посредством шарнирного пальца, при этом ось вращения шарнирного пальца перпендикулярна радиусу, проходящему через центр вращения втулки ротора;
ротора, имеющего шарнирные соединения между втулкой ротора и лопастями, шарнирные соединения выполнены для соединения каждой лопасти с рукавом втулки ротора, причем каждый рукав втулки жестко соединен с втулкой и вращается с ней заодно, комель каждой лопасти соединяется с каждым рукавом ротора посредством шарнирного пальца, при этом ось вращения шарнирного пальца скошена под углом к радиусу, проходящему через центр вращения втулки ротора;
регулятора, выполненного для осуществления притягивания передней консоли гироглайдера вниз или ее освобождения с целью придания консоли степени свободы для движения вверх в целях управления шагом гироглайдера, регулятор выполнен с возможностью увеличения или сокращения расстояния от самого регулятора до оконечностей плечей рычага управления креном, рычаг управления креном имеет плечи рычага по обеим сторонам гироглайдера в целях управления креном гироглайдера; и
уздечки, содержащей
первый тросик управления шагом и второй тросик управления шагом, соединенные с передней консолью и задней частью рамы гироглайдера соответственно, тросики далее соединены с управляющим устройством, и
первый тросик управления креном и второй тросик управления креном, каждый из тросиков соединен с оконечностями плечей рычага управления креном, тросики далее соединены с управляющим устройством, и
устройство управления креном, выбранное из группы, содержащей зубчатую направляющую, гидроцилиндр, тросик и металл с памятью формы, смонтированное в нижней части рамы в совокупности, как минимум, с одним сервоприводом;
уздечки, состоящей
из первого и второго управляющих тросиков, данные тросики имеют ближний и дальний концы, дальние концы первого и второго тросиков соединены с задней и передней частями рамы соответственно, ближний конец первого управляющего тросика соединен с задней частью рамы посредством сервопривода, ближний конец второго управляющего тросика соединен с передней частью посредством другого сервопривода в случае наличия двух устройств управления креном; и
управляющего устройства, соединенного с ближними концами первого и второго управляющих тросиков, выполненного для натяжения или ослабления первого управляющего тросика и второго управляющего тросика для управления шагом, управляющее устройство выполнено совместно с сервоприводом для натяжения или ослабления первого и второго управляющих тросиков посредством перемещения влево или вправо относительно рамы для управления креном.
5. Устройство по п.1, в котором указанная рама снабжена монтажной платформой, выбранной из группы, содержащей платформу для монтажа контрольно-измерительного и коммуникационного оборудования, систем сбора метеоданных, радиолокационных систем, систем пожарообнаружения, систем слежения за наземными объектами, систем средств связи и трансляционных усилителей мобильной связи.
6. Устройство по п.1, в котором имеется подшипник для снижения трения между ротором и опорой, подшипник снабжен элементами качения, работающими между внутренним кольцом подшипника, выполненным жестко закрепленным относительно вращения опоры или отсутствия такового и вращающимся наружным кольцом, элементы качения выбраны из группы, включающей роликовые упорные элементы и шариковые элементы. В качестве альтернативного варианта, подшипник снабжен элементами качения, работающими между вращающимся внутренним кольцом и внешним кольцом, выполненным жестко закрепленным относительно вращения опоры или отсутствия такового.
7. Устройство по п.1, указанное устройство содержит по меньшей мере одну систему, выбранную из группы, содержащей
раму, выполненную в виде трубы;
ротор, дополнительно содержащий шарнирные соединения, выполненные между втулкой ротора и лопастями, оси вращения шарнирных соединений скошены под углом по отношению к радиусу, проходящему через центр втулки ротора; и
первое управляющее устройство, содержащее воздействующее устройство, непосредственно соединенное с рамой и хвостовой балкой, хвостовая балка закреплена на внутреннем кольце подшипника, воздействующее устройство снабжено штоком и размещено в корпусе, корпус воздействующего устройства закреплен на раме, воздействующее устройство перемещением штока обеспечивает вращение хвостовой балки для управления шагом ротора,
подшипник для снижения трения между ротором и опорой ротора, подшипник снабжен элементами качения, работающими между вращающимся внутренним кольцом подшипника и внешним кольцом, выполненным закрепленным относительно вращения опоры или отсутствия такового; генератор электрической энергии в виде обмотки, закрепленной на внутреннем кольце и на внешнем кольцах подшипника, обмотка выполнена для прохождения через магнитное поле, создаваемое магнитом, установленным на внутреннем кольце, генератор обеспечивает энергию, достаточную для питания контрольно-измерительного и управляющего оборудования, установленного на гироглайдере,
шасси, установленное на раме в одном из вариантов, выбранных из группы, включающей выдвигаемое шасси, постоянное (неубирающееся) шасси, убирающееся шасси, гироглайдер имеет возможность взлетать или приземляться на посадочную площадку, опираясь на шасси, при этом посадочная площадка выполнена поворачивающейся вокруг шарнира на заранее установленный угол стыковки, соответствующий шагу ротора, посадочная площадка установлена на поворотной платформе наверху конструкции или сооружения, выбранного из группы, включающей здания, сооружения башенного типа и вышки, баржи, бакены, суда и транспортные средства,
посадочное устройство с ограничительной щелью;
два опорных рычага, каждый рычаг имеет ближний конец и дальний конец, опорные рычаги своими дальними концами подвижно прикреплены к посадочному устройству;
пустотелую поворотную платформу, опорные рычаги своими ближними концами подвижно прикреплены к платформе;
первый и второй управляющие тросы, заведенные в ограничительную щель и предназначенные для управления креном и шагом ротора, первый и второй управляющие тросы сведены в узел и далее образуют фал; и
направляющий блок, жестко закрепленный к поверхности, выбранной из группы, включающей здания, сооружения башенного типа и вышки, баржи, бакены, речные и морские суда, причем направляющий блок размещен непосредственно под поворотной платформой в центре, первый конец фала заведен через направляющий блок,
складирующее устройство, выполненное для выборочного снятия каждой рамы с соответствующего ротора на наземной станции, складирующее устройство выполнено для укладки роторов непосредственно один к одному с вставкой прокладочного материала между ними для последующего хранения, устройство дополнительно выполнено для обеспечения перемещения или перегруппировки любой рамы с соответствующим ей ротором; и
захватное устройство, выполненное для присоединения рамы к втулке ротора, захватное устройство выполнено для выборочной фиксации рамы в заранее определенной точке фала,
зубчатую направляющую с сервоприводом, установленную в нижней части рамы; и
грузовой отсек, содержащий аккумуляторную батарею и иное бортовое оборудование, отсек установлен с возможностью скольжения вперед и назад для изменения центра тяжести (ЦТ) в целях контролируемого свободного полета,
горизонтальный стабилизатор, установленный в хвостовой части гироглайдера, стабилизатор имеет рули для обеспечения создания противодействующей силы, направленной вниз, для уравновешивания подъемной силы в центре давления (ЦД) ротора, в целях контролируемого свободного полета, и
устройство изменения угла крена ротора, определяемого углом между вертикальной осью гироглайдера и вертикальной плоскостью к поверхности земли, включающей продольную ось гироглайдера; и
устройство для управления маневрированием гироглайдера, устройство выполнено для обеспечения маневрирования гироглайдера при боковом ветре таким образом, что возникает скорость бокового отклонения, причем возникшая относительная скорость превышает скорость окружающего воздушного потока, что приводит к натяжению фала.
8. Устройство по п.1, в котором указанное второе управляющее устройство содержит по меньшей мере одно устройство, выбранное из группы, состоящей из
ротора, дополнительно содержащего шарнирные соединения, выполненные между втулкой ротора и лопастями, оси вращения шарнирных соединений скошены под углом по отношению к радиусу, проходящему через центр втулки ротора, шарнирные соединения лопастей позволяют лопастям совершать маховые движения в целях управления шагом каждой лопасти,
ротора, при этом ротор имеет шарнирные соединения между втулкой ротора и лопастями, оси вращения шарниров выполнены перпендикулярно по отношению к радиусу, проходящему через центр втулки ротора, наличие шарнирных соединений позволяет лопастям осуществлять маховые движения, что дает возможность управления шагом каждой лопасти, лопасти установлены под углом по направлению движения передней кромки лопасти,
ротора, имеющего шарнирные соединения между втулкой и лопастями; и
механизма смещения, установленного между втулкой ротора и каждой лопастью и закрепленного посредством крепежного устройства, выбранного из группы, состоящей из фиксирующего штыря, фиксирующей стойки или грибовидного стержня, механизм выполнен для обеспечения смещения каждой лопасти вверх, является упругим элементом и подвергается воздействию центробежной силы, механизм предназначен для осуществления пассивного управления шагом ротора, и
ротора, имеющего шарнирные соединения между втулкой и лопастями; и
механизма смещения, установленного между втулкой ротора и каждой лопастью и закрепленного посредством крепежного устройства, выбранного из группы, состоящей из фиксирующего штыря, фиксирующей стойки или грибовидного стержня, механизм выполнен для обеспечения смещения каждой лопасти вверх, при этом механизм выполнен в виде сервопривода для осуществления активного управления шагом ротора.
9. Устройство по п.1, в котором реактивные двигатели установлены на концах лопастей, реактивные двигатели приводятся в действие дистанционно с наземной станции и выполнены для обеспечения управления полетом гироглайдера во время старта и приземления.
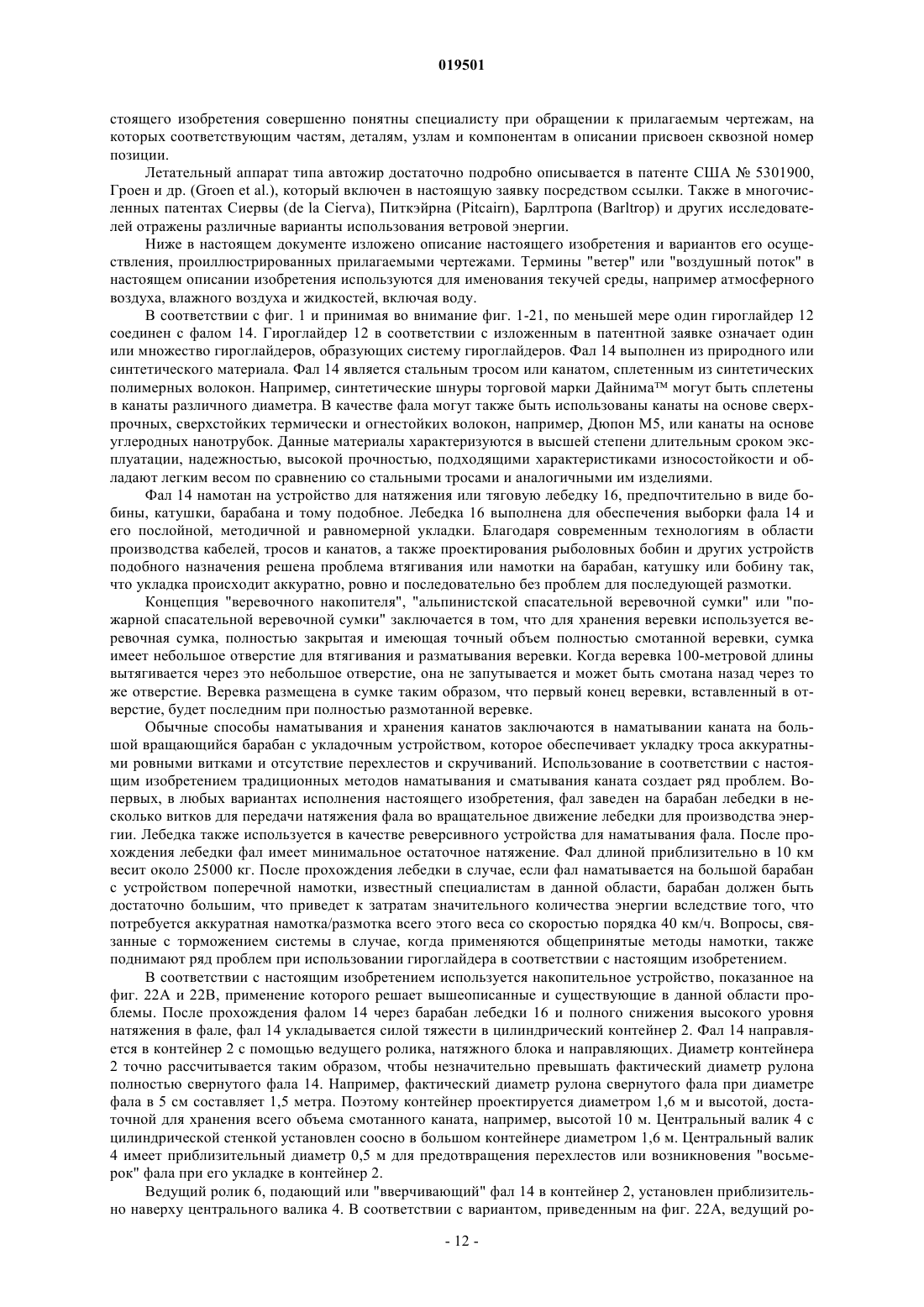
10. Устройство по п.1, в котором указанный фал хранится в накопительном устройстве, содержащем
контейнер с глухой цилиндрической стенкой и открытой верхней поверхностью, контейнер имеет диаметр, чуть больший диаметра рулона полностью смотанного фала, причем на цилиндрическую стенку контейнера нанесено покрытие для уменьшения трения и теплообразования;
центральный валик с цилиндрической стенкой, валик обеспечивает заполнение объема и установлен соосно внутри контейнера, валик определяет свободный объем для укладки фала между валиком и стенкой контейнера, объем для помещения фала достаточен для укладки в предопределенном порядке аккуратными ровными витками и обеспечивает отсутствие перехлестов и скручиваний фала при его размещении в контейнере, на цилиндрической стенке вала выполнено покрытие; и
ведущий ролик, направляющий блок и направляющая выполнены для укладки фала через центр верхней открытой поверхности в контейнер с заранее установленной скоростью и только в одном направлении.
11. Устройство по п.1, в котором указанный контроллер выполнен для управления гироглайдером в соответствии с сигналами навигационной системы, установленной на гироглайдере, навигационная система выбрана из группы, содержащей систему глобального позиционирования и устройство определения местоположения по радиомаякам, контроллер выполнен с возможностью исключения помех от воздействия навигационной системы, установленной на другом гироглайдере.
12. Способ получения энергии с использованием устройства по п.1, включающий
создание подъемной силы для гироглайдера за счет вращения его ротора вокруг оси вращения;
обеспечение наличия фала, заведенного на тяговую лебедку, фал имеет первый и второй концы;
размещение первого конца фала непосредственно на земле, второй конец вытягивается вверх,
закрепление гироглайдера на втором конце фала;
подключение тяговой лебедки к преобразователю;
измерение натяжения в фале, существующего или добавленного;
измерение скорости воздушного потока, воздействующего на гироглайдер;
систематический контроль натяжения фала и формирование выходных данных об уровне натяжения;
выполнение запуска и полета гироглайдера на фале, в ходе которого
осуществляется селективное управление шагом ротора в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном;
осуществляется селективное управление шагом лопастей в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; и
осуществляется управление натяжением фала посредством перемежающихся циклов его сматывания или ослабления, выполняемых преобразователем, причем в последнем случае преобразователь работает в режиме реверса, в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; и
преобразование вращательной энергии тяговой лебедки в электрическую энергию.
13. Способ получения энергии по п.12, в котором гироглайдер закрепляется на фале с размещением на некотором расстоянии от другого гироглайдера в ряду гироглайдеров на фале в случае, когда в соответствии с настоящим изобретением используется более одного гироглайдера.
14. Способ получения энергии по п.12, в котором полет гироглайдера на фале включает по меньшей мере одно действие, выбранное из группы, содержащей
управление полетом гироглайдера автопилотом,
управление полетом гироглайдера посредством автопилота в соответствии с данными о положении и координатах гироглайдера, полученными установленной на гироглайдере навигационной системой, навигационная система защищена от помех, возникающих при работе навигационных систем других гироглайдеров в случае одновременного полета более одного гироглайдера,
управление натяжением фала, уменьшение натяжения понижением шага лопасти и увеличение натяжения увеличением шага лопасти,
управление натяжением фала путем реагирования ротора на изменение натяжения, при этом шаг лопастей ротора уменьшается при увеличении натяжения и увеличивается при падении натяжения, и
поддержание шага ротора постоянным;
изменение угла крена ротора, определяемого углом между вертикальной осью гироглайдера и вертикальной плоскостью к поверхности земли, включающей продольную ось гироглайдера;
маневрирование гироглайдером в боковом ветре таким образом, что возникает скорость бокового смещения;
создание относительной скорости воздушного потока, набегающего на ротор, превышающей скорость действительного окружающего воздушного потока; и
применение маневрирования.
15. Способ получения энергии по п.12, в котором селективное управление шагом лопасти содержит по меньшей мере одно действие, выбранное из группы, состоящей из
пассивного управления отклонением каждой лопасти вверх за счет установки устройств отклонения лопастей в виде упругих силовых элементов, вызывающих поворот лопастей по направлению к оси вращения,
воздействия на лопасти центробежной силы, увеличивающейся с увеличением скорости вращения ротора и противодействующей усилию натяжения в устройстве отклонения каждой лопасти, данное воздействие выравнивает лопасти,
активного управления отклонением каждой лопасти вверх за счет установки устройств отклонения лопастей в виде сервоприводов, вызывающих поворот лопастей по направлению к оси вращения,
уменьшения и увеличения шага ротора,
взаимосвязи шага лопасти с углом конусности ротора, угол конусности представляет собой угол между осью лопасти и осью вращения ротора, и
взаимосвязи шага лопасти с углом конусности ротора, угол конусности представляет собой угол между осью лопасти и осью вращения ротора;
селективное управление шагом лопастей также включает осуществление изменения угла конусности, которое производится посредством изменения равновесия сил, действующих на лопасти со стороны фала и набегающего воздушного потока.
16. Способ получения энергии по п.12, дополнительно содержащий по меньшей мере одно действие или группу действий, выбранное из группы, состоящей из
предварительной раскрутки ротора набегающим воздушным потоком установкой отрицательного значения шага лопастей; и
передачи энергии набегающего воздушного потока лопастям, при этом ротор работает, как минимум, в качестве ветрогенератора или ветротурбины,
активного управления гироглайдером путем селективного поворота лопастей из положения работы в режиме турбины с отрицательным шагом лопастей в положение авторотации с положительным шагом,
наличия поворотной платформы, соединенной с ротором и обеспечивающей вращение ротора и возможность поворота платформы относительно рамы;
подтягивания гироглайдера посредством работы тяговой лебедки в связи с падением скорости набегающего воздушного потока ниже порогового значения;
подтягивания гироглайдера с относительной скоростью, достаточной для управляемого полета гироглайдера по направлению к лебедке;
полета гироглайдера в режиме спуска непосредственно к лебедке в связи с падением скорости набегающего воздушного потока ниже порогового значения, требующегося либо для управляемого полета, либо для производства энергии,
наличия шасси, установленного на раме;
размещения посадочной поверхности в непосредственной близости от тяговой лебедки, посадочная поверхность закрепляется на полой объемной поверхности;
протягивания фала от лебедки через щель в посадочной поверхности;
вытягивания фала лебедкой через полую объемную поверхность;
касания посадочной поверхности по меньшей мере одной из стоек шасси при посадке гироглайдера на посадочную поверхность и
позиционирования ротора для вращения в плоскости, параллельной посадочной поверхности путем поворота рамы вследствие касания посадочной поверхности по меньшей мере одной из стоек шасси,
размещения контрольно-измерительного оборудования и аппаратуры на раме; и
поддержания гироглайдера на достаточно большой и постоянной высоте,
размещения множества гироглайдеров на фале с единственной тяговой лебедкой;
полета множества гироглайдеров на высоте;
посадки множества гироглайдеров на посадочную поверхность;
возвращения каждого гироглайдера из множества гироглайдеров в индивидуальном порядке и по одному;
снятия каждого из гироглайдеров с фала по одному;
снятия каждой рамы с соответствующего ротора;
укладки роторов непосредственно один к одному с вставкой прокладочного материала между ними для последующего хранения; и
перемещения или перегруппировки каждой рамы из совокупности гироглайдеров с соответствующим ей ротором;
обеспечения установки двигательного устройства, выбранного из группы, содержащей реактивные двигатели, реактивные сопла, турбинные и винтовые двигатели и моторы, причем двигательное устройство установлено на лопастях;
определения критической или внештатной ситуации; и
запуска и управления двигательным устройством для осуществления контролируемого полета гироглайдера; и
обеспечения наличия контейнера с глухой цилиндрической стенкой и открытой верхней поверхностью с диаметром, немного большим фактического диаметра рулона полностью смотанного фала;
обеспечения наличия на цилиндрической стенке покрытия для уменьшения трения и теплообразования;
обеспечения наличия центрального валика, установленного соосно с контейнером;
определения объема накопительного пространства между контейнером и вставленным в него валиком, полностью и надлежащим образом смотанный фал должен занимать весь установленный объем накопительного пространства; и
укладки фала надлежащим образом в накопительное пространство заранее установленного объема с заранее определенной скоростью укладки с использованием ведущего ролика, направляющего блока и направляющей, выбранных из группы, содержащей перемещаемый или неподвижный узел укладки.
17. Способ получения энергии по п.12, в котором селективное управление шагом ротора содержит по меньшей мере одно действие, выбранное из группы, состоящей из
управления шагом ротора, которое включает наличие поворотной платформы, которая может поворачиваться относительно рамы так, что отношение подъемной силы к сопротивлению равно отношению длины смещения центра вращения ротора к высоте смещения центра вращения ротора, которые заданы расстоянием от оси вращения ротора до оси вращения шарнира поворотной платформы и высотой центра вращения ротора над осью вращения шарнира соответственно, и
управления шагом ротора при приближении ротора к посадочной поверхности в ходе посадки.

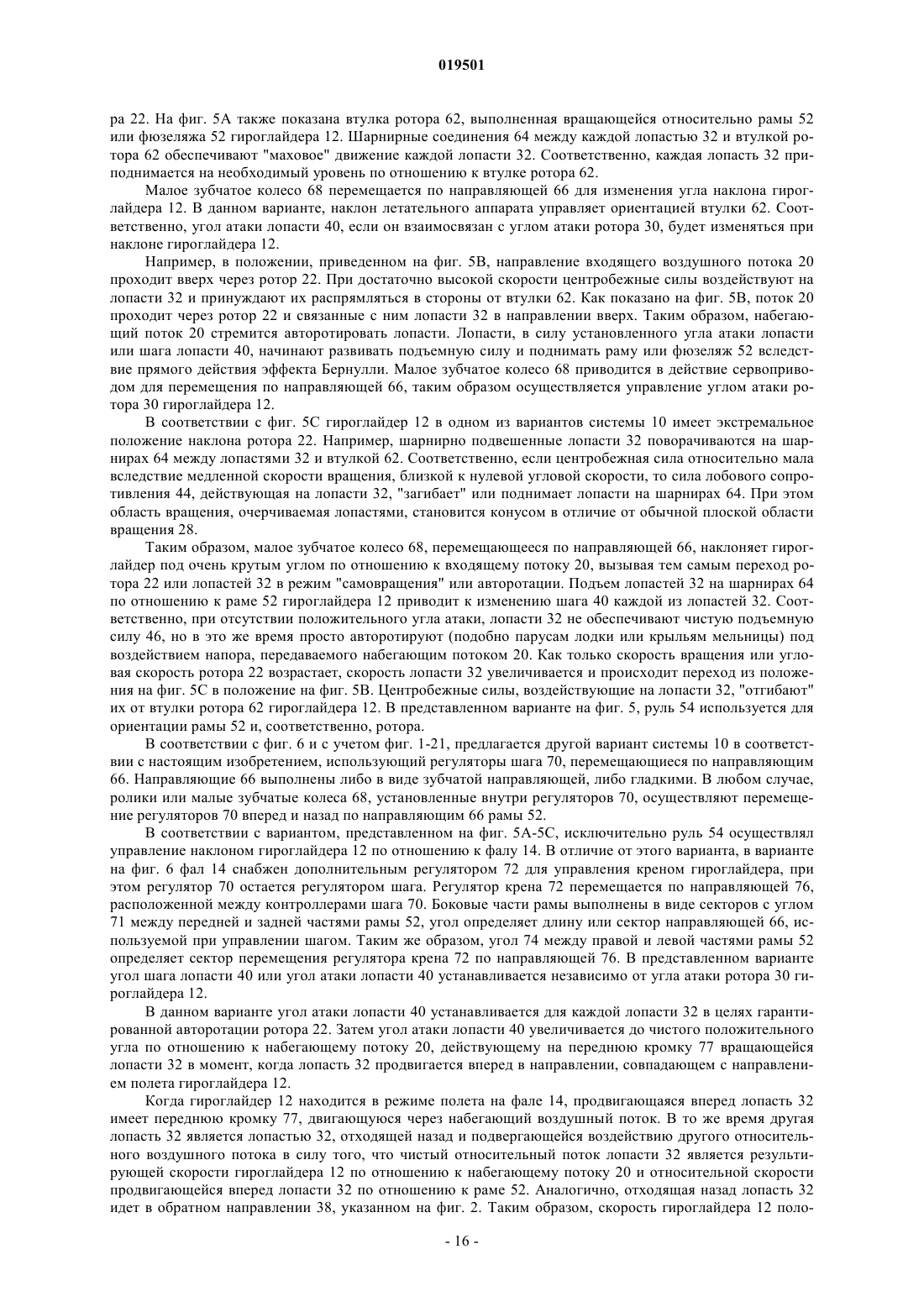
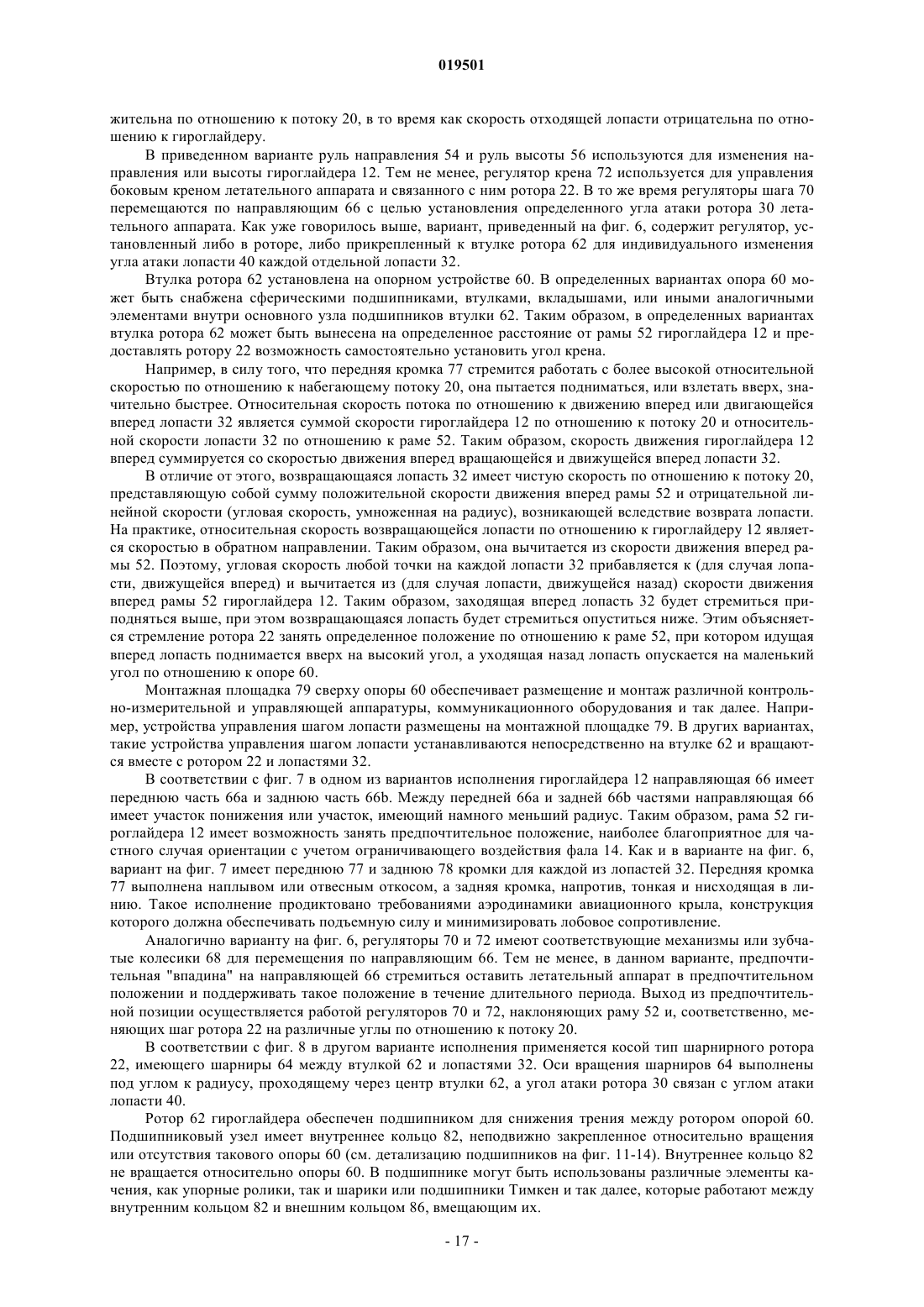
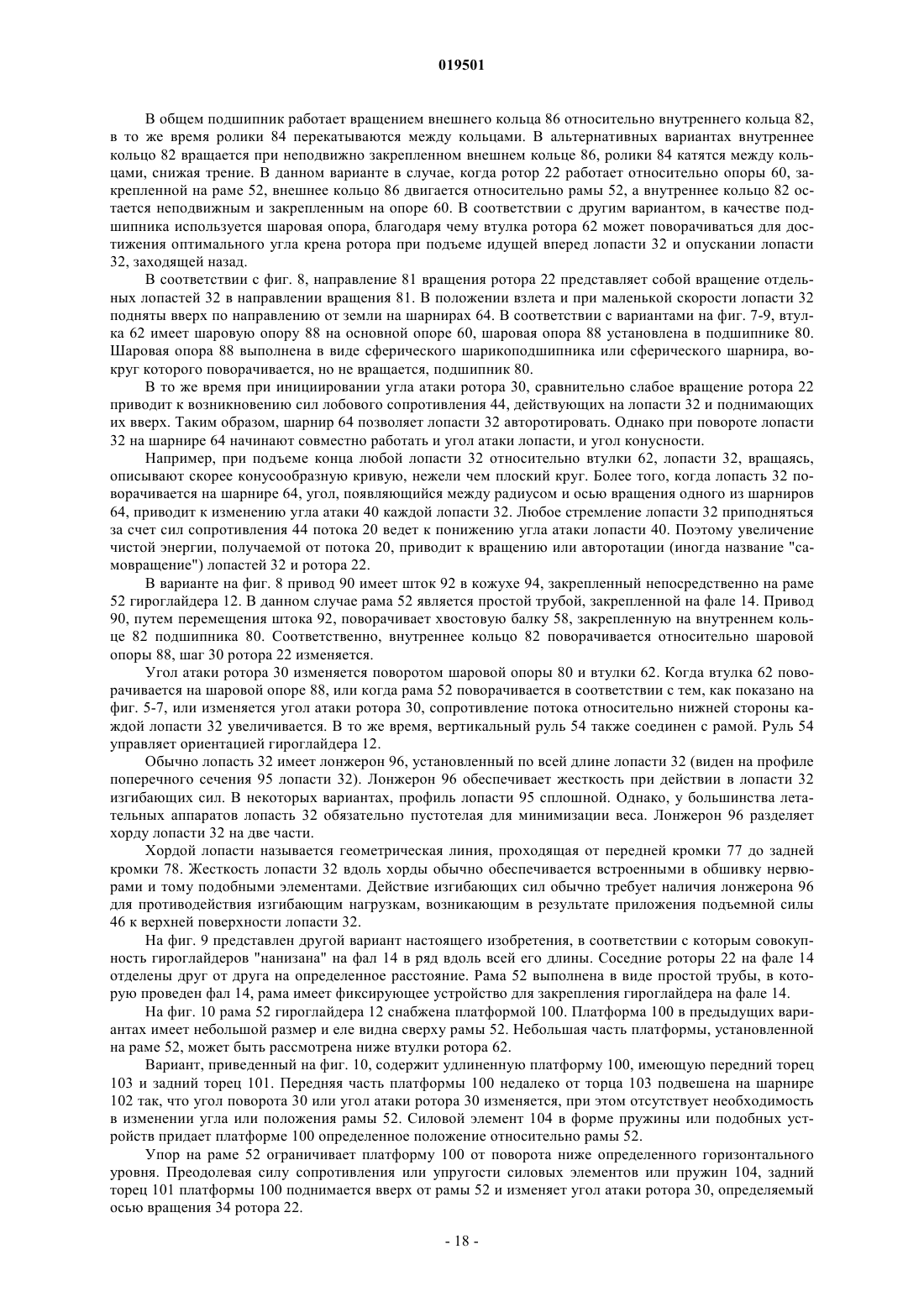
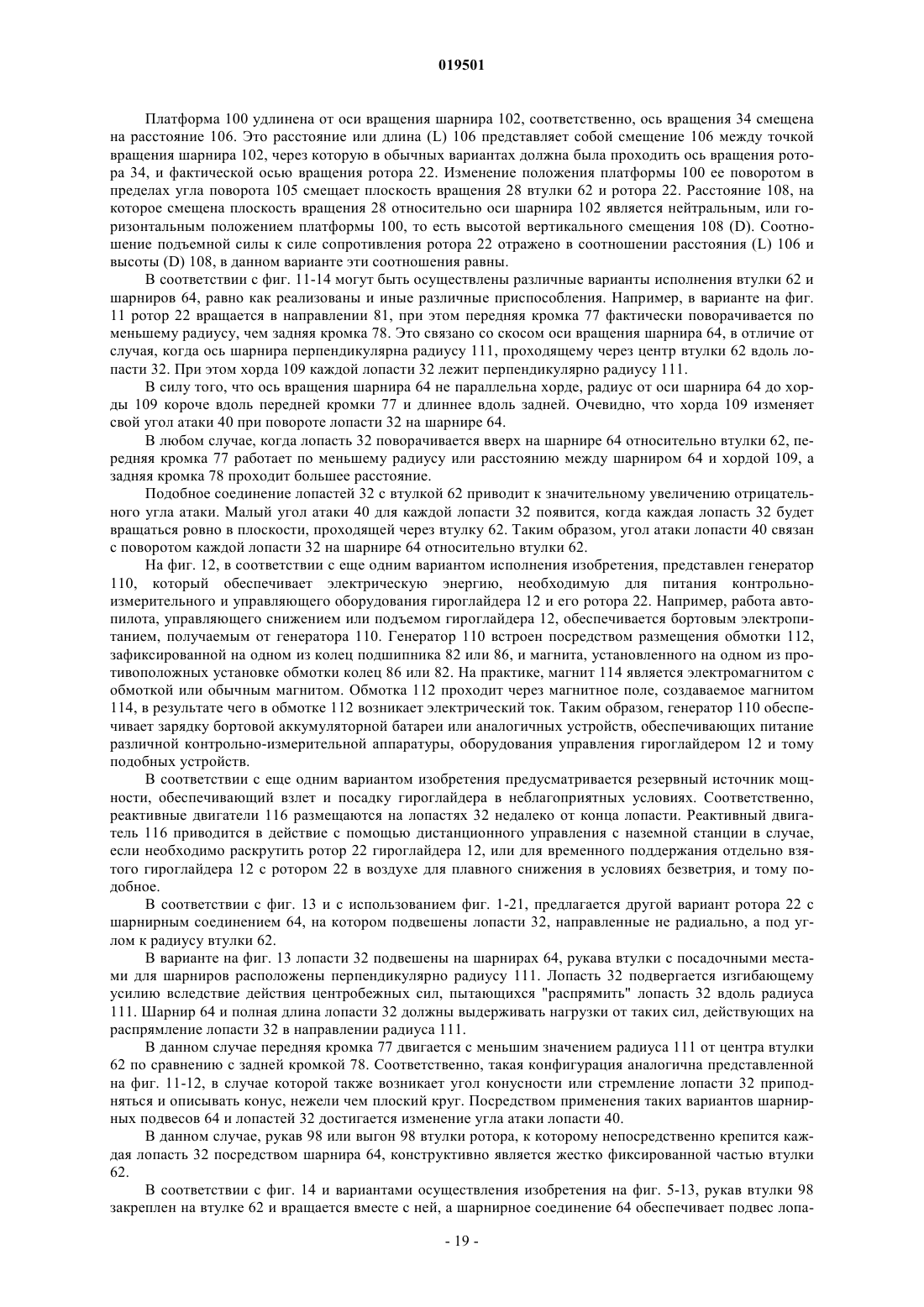
Текст
ПОЛУЧЕНИЕ ЭЛЕКТРОЭНЕРГИИ ПРИ ПОМОЩИ ГИРОГЛАЙДЕРА, УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ Устройство и способ получения электроэнергии с применением гироглайдера, устройство содержит по меньшей мере один гироглайдер с вращающимся крылом, летящий на высоте над поверхностью Земли. Крепкий и гибкий фал, соединенный с рамой гироглайдера, вытягивается за счет подъемной силы, генерируемой вращающимся крылом. Усилие, возникающее при линейном движении вытягиваемого фала, принимается наземной станцией и преобразуется во вращательное электрогенератора. Мощность на сматывание фала и подтягивание гироглайдера к земной поверхности компенсируется управляемым спуском гироглайдера с определенной скоростью и подъемной силой. Усилие, затрачиваемое на спуск гироглайдера и наматывание фала, существенно мало по сравнению с усилием, развиваемым подъемной силой гироглайдера при разматывании фала. Таким образом, разница прилагаемых сил приводит к получению значительного количества энергии. Область изобретения Данное изобретение относится к области управления безмоторными летательными аппаратами, а именно к управлению привязными гироглайдерами, используемыми в составе устройства для получения электроэнергии. Предпосылки создания изобретения Летательные аппараты типа автожир являются разновидностью моторных или безмоторных винтокрылых летательных аппаратов и обычно оснащены одним или более авторотирующими несущими винтами или роторами. У вертолетов приведение в действие винта осуществляется силовой установкой, установленной на борту. У автожиров при подготовке к взлету осуществляется предварительная раскрутка ротора, затем автожир взлетает и летит за счет авторотации ротора и работы толкающего винта. Различные варианты таких аппаратов разрабатываются и совершенствуются начиная с первой четверти двадцатого века. В 30-х годах осуществлялась коммерческая эксплуатация автожиров, например эти аппараты использовались для перевозки почты. Подъемная сила у автожира создается исключительно из-за авторотации ротора, без применения какого-либо энергетического привода. Ротор автожира одновременно является крылом, которое вращается или "авторотирует" от воздействия потока воздуха, проходящего через него снизу. Когда воздушный поток проходит через ротор снизу, лопасти ротора находятся под углом по отношению к воздушному потоку и вследствие этого работают как паруса, передавая энергию воздушного потока ротору, раскручивают ротор и отводят воздушный поток. При отклонении воздушного потока возникает момент,соответствующий изменению направления и скорости воздушного потока, который трансформируется в усилие, приводящее к движению ротора. Главный принцип работы автожира основан на знании о том, что процесс авторотации ротора автожира достаточен для развития скорости, вызывающей эффект Бернулли. Если лопасть имеет не симметричный профиль, а имеет сравнительно плоскую нижнюю поверхность и закругленную верхнюю, то при ее движении, под воздействием воздушного потока, проходящего через нее снизу, такой профиль создает разрежение вдоль верхней поверхности лопасти, вызывая подъемную силу, толкающую лопасть вверх. Летательный аппарат с неподвижным крылом протягивается через воздух винтом так, что воздушный поток обтекает крыло. Подъемная сила возникает за счет уменьшения давления воздуха над верхней поверхностью крыла, так как скорость воздуха выше над верхней, более толстой частью профиля крыла. Несущий винт автожира также создает подъемную силу за счет разницы в скоростях воздушного потока снизу и сверху лопастей. Падение давления является результатом действия закона сохранения энергии при обтекании воздушным потоком профиля. Совокупный напор воздушного потока остается неизменным. Когда скорость потока изменяется, ускоряясь в случае прохождения воздушного потока над верхней поверхностью лопасти, статическое давление над этой плоскостью должно упасть для сохранения напора на прежнем уровне. Кривизна верхней плоскости профиля лопасти ограничивает площадь поперечного сечения для прохождения воздушного потока над лопастью, заставляя воздушный поток ускоряться, что и приводит к снижению давления в соответствии с законом сохранения энергии. Автожиры оснащаются маршевым двигателем с толкающим винтом, установленным в задней части фюзеляжа, для осуществления горизонтального перемещения аппарата. Диск ротора, то есть воображаемый круг, очерчиваемый лопастями ротора, находится под определенным углом к набегающему потоку воздуха, таким образом набегающий воздушный поток перенаправляется вверх через пространство диска ротора. Передняя оконечность диска ротора приподнята вверх, а задняя оконечность диска наклонена вниз. В то же время, текущий угол лопасти по отношению к воздушному потоку, через который она проходит во время своего вращения, устанавливается таким образом, чтобы минимизировать лобовое сопротивление воздуха и максимально способствовать увеличению подъемной силы. "Шаг лопасти" управляется обычным образом или устанавливается в положение "лететь". Наиболее существенное открытие в области летательных аппаратов типа автожир состоит, вероятно, в том, что относительная скорость ротора, вращающегося в воздухе, может быть не связана с относительной скоростью всей системы (фюзеляж, ось вращения и тому подобное). Таким образом, скорость сваливания может значительно отличаться от относительной скорости самого аппарата. Вертолеты обладают способностью "зависать". Автожиры, наоборот, могут зависать только в определенных ограниченных ситуациях, например, когда тяга винтомоторной группы такого аппарата или иных устройств, обеспечивающих горизонтальное перемещение аппарата, сопоставима с напором набегающего воздушного потока. В такой ситуации или во время снижения, автожир может зависнуть или сохранять определенное положение относительно земли. Тем не менее, вертолет может зависать при любой скорости набегающего воздушного потока, в том числе в ситуации полного безветрия. Долгие годы ветроэнергетика развивалась по своему пути независимо от развития авиации. Кинетическая энергия проходящего воздушного потока принимается лопастями ветроэнергоустановки, воздушный поток изменяет направление своего движения, таким образом, энергия перемещающейся воз-1 019501 душной массы приводит в движение лопасти установки. Посредством соответствующих механических передающих устройств и сопряжений энергия вращения лопастей может передаваться линейно или вращательно любым другим устройствам или механизмам. Например, при работе мукомольной мельницы энергия воздушного потока, принятая ветряком или лопастями, трансформируется во вращательное движение жерновов. В начале двадцатого века генераторы электроэнергии, в основном в виде ветроэнергоустановок, устанавливались в удаленных районах, недоступных для использования предприятиями общественного пользования и коммунальных услуг. Подобные системы использовали пропеллеры, аналогичные применявшимся на ветряных мельницах или многолопастные винты, вращавшие генератор, с последующим сохранением энергии в аккумуляторных батареях. В последние годы для установки роторов и винтов, извлекающих энергию из воздушного потока,строились всевозможные типы вышек, опор и мачт различного конструктивного исполнения. При этом в конструкциях самих роторов использовались все инженерные разработки в области аэродинамики несущих крыльев и авиационных винтов. Однако проектирование и строительство, в целях получения энергии, летательных аппаратов или летательных устройств, проталкиваемых в воздухе, велось в значительно меньшей степени. Разрабатывались громоздкие и дорогостоящие системы для поднятия над поверхностью земли ветротурбин, ветроустановок или подобных устройств в районах сильных или постоянных ветров, или в других имеющих коммерческое значение районах с наличием возможности получения ветровой энергии. Тем не менее, получение ветровой энергии по-прежнему является достаточно сложным и затратным видом деятельности. Параметры ветра на поверхности земли оцениваются, главным образом, на основе моделей погоды и метеорологических карт для данного района. Для принятия решения может быть также выбраны данные о наличии постоянного однонаправленного ветра в конкретном районе. Для отдельного района может быть составлен график дневного цикла изменений скорости и направления ветра в зависимости от времени. Значительные усилия, энергия и инженерные ресурсы затрачиваются на совершенствование систем и контрольно-измерительной аппаратуры метеонаблюдений, разработанных для измерений скорости и направления ветра на небольшой высоте от поверхности земли. Движение воздушных масс порождается и поэтому зависит от явлений, происходящих в окружающей среде. Например, долины и каньоны являются классическими источниками ветровой энергии. Суточные циклы охлаждения и нагревания земной поверхности в долинах и горах вызывают изменения скорости и направления ветра, что может быть использовано для получения ветровой энергии. Однако применение существующих устройств и способы их установки ограничены их физическими характеристиками, а также физическими и инженерными условиями их эксплуатации. Таким образом,существует необходимость разработки устройства и способа для получения ветровой энергии со значительно большей продолжительностью рабочей нагрузки и эффективностью его использования при производстве электроэнергии по сравнению с имеющимися стационарными ветроэнергоустановками. Сущность изобретения Предлагается устройство для получения электроэнергии с применением гироглайдера, содержащее по меньшей мере один гироглайдер, содержащий ротор с несколькими лопастями, ротор подвижно закреплен на раме, ротор выполнен с возможностью вращения вокруг оси и обеспечивает создание подъемной силы гироглайдера; ротор имеет шаг ротора, характеризующийся траекторией ротора по отношению к набегающему воздушному потоку и шаг лопасти, определяемый соответственно для каждой из лопастей углом наклона лопасти по отношению к набегающему воздушному потоку; фал имеет первый и второй концы, первый конец расположен непосредственно на земле, второй конец вытягивается наверх, фал выполнен для обеспечения удержания гироглайдера своим вторым концом; устройство управления натяжением, предназначенное для управления натяжением фала, включающее: бортовой измеритель натяжения, предназначенный для измерения натяжения, существующего или дополнительно возникшего в фале; датчик скорости ветра, обеспечивающий определение скорости воздушного потока, воздействующего на гироглайдер; и контроллер, предназначенный для получения данных от бортового измерителя натяжения и датчика скорости ветра и циклического контроля натяжения посредством проверки соответствия данных, полученных от бортового измерителя натяжения, параметрам конфигурации гироглайдера, ротора и лопастей,и последующего формирования выходного сигнала о состоянии фала; первое управляющее устройство, выполненное для получения выходного сигнала о состоянии фала и селективного управления шагом ротора в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; второе управляющее устройство, выполненное для получения сигнала о состоянии фала и селективного управления шагом лопастей в случае, когда выходной сигнал содержит значение, слишком ма-2 019501 ленькое или слишком высокое по сравнению с заранее определенным диапазоном; тяговая лебедка, получающая выходной сигнал о состоянии фала и обеспечивающая наматывание или разматывание фала в заранее установленном систематическом порядке в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; преобразователь, предназначенный для преобразования энергии вращения тяговой лебедки в электрическую энергию в форме, выбранной из группы, содержащей передаваемую и накапливаемую формы; и соединительное устройство, выполненное для обеспечения соединения тяговой лебедки с преобразователем. В предпочтительном варианте настоящего изобретения гироглайдер размещен на некотором расстоянии от другого гироглайдера в ряду гироглайдеров на фале в случае, когда используется более одного гироглайдера. В обычном исполнении фал выбран из группы материалов, включающей стальной трос, сплетенные из синтетических полимерных волокон канаты, канаты на основе сверхпрочных, сверхстойких термически и огнестойких волокон, канаты на основе углеродных нанотрубок. В обычном исполнении тяговая лебедка выбрана из группы, содержащей бобину, катушку, барабан. В предпочтительном исполнении тяговая лебедка установлена непосредственно на земной поверхности, а именно на суше или на водной поверхности. В предпочтительном исполнении преобразователь выбран из группы, содержащей электрогенератор, гидравлический двигатель, двигатель-генератор и газовый компрессор. В обычном исполнении рама оснащена устройством управления шагом, которое выбрано из группы, состоящей из рулей направления, рулей высоты, рулей направления и рулей высоты совместно. В обычном исполнении в соответствии с настоящим изобретением первое управляющее устройство и второе управляющее устройство взаимосвязаны друг с другом. Отличительной особенностью настоящего изобретения является то, что первое управляющее устройство имеет раму, нижняя часть которой выполнена секторным зубчатым колесом с внутренним зацеплением, в пределах сектора которого перемещается малое зубчатое колесо, приводимое в действие сервоприводом, малое зубчатое колесо управляет шагом ротора. В соответствии с одним из вариантов настоящего изобретения предлагается устройство для получения электроэнергии с применением гироглайдера, содержащее по меньшей мере один гироглайдер, состоящий из ротора, установленного на опоре, ротор снабжен несколькими лопастями и подвижно закреплен на раме, ротор выполнен с возможностью вращения вокруг оси и обеспечивает создание подъемной силы гироглайдера; ротор имеет шаг ротора, определяемый наклоном ротора по отношению к набегающему воздушному потоку и шаг лопасти, определяемый соответственно для каждой из лопастей углом наклона лопасти по отношению к набегающему воздушному потоку; фал имеет первый и второй концы, первый конец расположен непосредственно на земле, второй конец вытягивается наверх, фал выполнен для обеспечения удержания гироглайдера своим вторым концом; устройство управления натяжением, предназначенное для управления натяжением фала, включающее: бортовой измеритель натяжения, предназначенный для измерения натяжения, существующего или дополнительно возникшего в фале; датчик скорости ветра, обеспечивающий определение скорости ветра, воздействующего на гироглайдер; и контроллер, предназначенный для получения данных от бортового измерителя натяжения и датчика скорости ветра и циклического контроля натяжения посредством проверки соответствия данных, полученных от бортового измерителя натяжения, параметрам конфигурации гироглайдера, ротора и лопастей,и последующего формирования выходного сигнала о состоянии фала; первое управляющее устройство, выполненное для получения выходного сигнала о состоянии фала и селективного управления шагом ротора в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; второе управляющее устройство, выполненное для получения сигнала о состоянии фала и селективного управления шагом лопастей в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; тяговая лебедка, получающая выходной сигнал о состоянии фала и обеспечивающая наматывание или разматывание фала в заранее установленном систематическом порядке в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; преобразователь, предназначенный для преобразования энергии вращения тяговой лебедки в электрическую энергию в форме, выбранной из группы, содержащей передаваемую и накапливаемую формы; и соединительное устройство, выполненное для обеспечения соединения тяговой лебедки с преобразователем. В предпочтительном исполнении в соответствии с настоящим изобретением первое управляющее устройство содержит по меньшей мере два регулятора шага, перемещающиеся по направляющим рамы, рама выполнена с углом расхождения боковой части, обеспечивающим заранее установленную длину направляющих между передней и задней частями рамы, направляющая рамы предопределяет заданную траекторию перемещения малого зубчатого колеса, малое зубчатое колесо перемещается по направляющей, направляющая выполнена для обеспечения перемещения малого зубчатого колеса вперед и назад по направляющей,направляющие выбраны из группы, включающей гладкую направляющую, секторное зубчатое колесо с внутренним зацеплением, гладкую направляющую из двух частей, передней и задней, с зоной фиксированного положения между передней и задней частями для обеспечения предпочтительного положения рамы, удерживаемой фалом, и зубчатую направляющую из двух частей, передней и задней, с зоной фиксированного положения между передней и задней частями для обеспечения предпочтительного положения рамы, удерживаемой фалом; и регулятор крена, перемещающийся по направляющей между регуляторами шага, левая и правая части рамы соединены между собой под углом, обеспечивающим заранее установленную длину направляющей. Дополнительно рама снабжена монтажной плитой, выполненной для обеспечения возможности установки управляющего и контрольно-измерительного оборудования и аппаратуры. В обычном исполнении в соответствии с настоящим изобретением предлагается подшипник для снижения трения между ротором и опорой, подшипник снабжен элементами качения, работающими между внутренним кольцом подшипника, выполненным жестко закрепленным относительно вращения опоры или отсутствия такового и вращающимся наружным кольцом, элементы качения выбраны из группы, включающей роликовые упорные элементы и шариковые элементы. В качестве альтернативного варианта, подшипник снабжен элементами качения, работающими между вращающимся внутренним кольцом и внешним кольцом, выполненным жестко закрепленным относительно вращения опоры или отсутствия такового. В предпочтительном варианте гироглайдер дополнительно содержит раму, выполненную в виде трубы; ротор, дополнительно содержащий шарнирные соединения, выполненные между втулкой ротора и лопастями, оси вращения шарнирных соединений скошены под углом по отношению к радиусу, проходящему через центр втулки ротора; и первое управляющее устройство, содержащее воздействующее устройство, непосредственно соединенное с рамой и хвостовой балкой, хвостовая балка закреплена на внутреннем кольце подшипника, воздействующее устройство снабжено штоком и размещено в корпусе, корпус воздействующего устройства закреплен на раме, воздействующее устройство перемещением штока обеспечивает вращение хвостовой балки для управления шагом ротора. Еще одним отличительным признаком настоящего изобретения является то, что первое управляющее устройство содержит поворотную платформу, выполненную для поворота относительно заранее определенной оси вращения на раме, платформа имеет передний торец и задний торец, отстоящие друг от друга на заранее определенном расстоянии, ось вращения платформы выполнена непосредственно в области переднего торца, платформа выполнена для совершения поворота своим задним торцом относительно оси вращения на раме и снабжена силовым упругим элементом, непосредственно соединенным с рамой, силовой упругий элемент выполнен для придания платформе определенного положения относительно рамы. Отличительным признаком настоящего изобретения является то, что второе управляющее устройство содержит ротор, ротор имеет шарнирные соединения между втулкой ротора и лопастями, оси вращения шарнирных соединений скошены под углом по отношению к радиусу, проходящему через центр втулки ротора, наличие шарнирных соединений позволяет лопастям осуществлять маховые движения и,таким образом, дает возможность управлять шагом каждой лопасти. В предпочтительном варианте исполнения устройство дополнительно имеет подшипник для снижения трения между ротором и опорой ротора, подшипник снабжен элементами качения, работающими между вращающимся внутренним кольцом подшипника и внешним кольцом, выполненным закрепленным относительно вращения опоры, или отсутствие такового; генератор электрической энергии в виде обмотки, закрепленной на внутреннем кольце и на внешнем кольцах подшипника, обмотка выполнена для прохождения через магнитное поле, создаваемое магнитом, установленным на внутреннем кольце,генератор обеспечивает энергию, достаточную для питания контрольно-измерительного и управляющего оборудования, установленного на гироглайдере. В предпочтительном варианте исполнения устройство снабжено реактивными двигателями, установленными на концах лопастей, реактивные двигатели приводятся в действие дистанционно с наземной станции и выполнены для обеспечения управления полетом гироглайдера во время старта и приземле-4 019501 ния. В обычном исполнении отличительным признаком настоящего изобретения является то, что второе управляющее устройство содержит ротор, при этом ротор имеет шарнирные соединения между втулкой ротора и лопастями, оси вращения шарниров выполнены перпендикулярно по отношению к радиусу,проходящему через центр втулки ротора, наличие шарнирных соединений позволяет лопастям осуществлять маховые движения, что дает возможность управления шагом каждой лопасти, лопасти установлены под углом по направлению движения передней кромки лопасти. Еще одним отличительным признаком настоящего изобретения является то, что первое управляющее устройство содержит ротор, причем ротор имеет шарнирные соединения между втулкой ротора и лопастями, шарнирные соединения выполнены для соединения каждой лопасти с рукавом втулки ротора,при этом каждый рукав втулки жестко соединен с втулкой и вращается с ней заодно, комель каждой лопасти соединяется с каждым рукавом ротора посредством шарнирного пальца, при этом ось вращения шарнирного пальца перпендикулярна радиусу, проходящему через центр вращения втулки ротора. В обычном исполнении, первое управляющее устройство также содержит ротор, причем ротор имеет шарнирные соединения между втулкой ротора и лопастями, шарнирные соединения выполнены для соединения каждой лопасти с рукавом втулки ротора, причем каждый рукав втулки жестко соединен с втулкой и вращается с ней заодно, комель каждой лопасти соединяется с каждым рукавом ротора посредством шарнирного пальца, при этом ось вращения шарнирного пальца скошена под углом к радиусу,проходящему через центр вращения втулки ротора. Кроме того, второе управляющее устройство дополнительно содержит ротор, причем ротор имеет шарнирные соединения между втулкой и лопастями; и механизм смещения, установленный между втулкой ротора и каждой лопастью и закрепленный посредством крепежного устройства, выбранного из группы, состоящей из фиксирующего штыря, фиксирующей стойки или грибовидного стержня, механизм выполнен для обеспечения смещения каждой лопасти вверх, является упругим элементом и подвергается воздействию центробежной силы, механизм предназначен для осуществления пассивного управления шагом ротора. В частности, второе управляющее устройство дополнительно содержит ротор, причем ротор имеет шарнирные соединения между втулкой и лопастями; и механизм смещения, установленный между втулкой ротора и каждой лопастью и закрепленный посредством крепежного устройства, выбранного из группы, состоящей из фиксирующего штыря, фиксирующей стойки или грибовидного стержня, механизм выполнен для обеспечения смещения каждой лопасти вверх, при этом механизм выполнен в виде сервопривода для осуществления активного управления шагом ротора. В предпочтительном исполнении гироглайдер снабжен шасси, установленным на раме в одном из вариантов, выбранных из группы, включающей выдвигаемое шасси, постоянное (неубирающееся) шасси,убирающееся шасси, гироглайдер имеет возможность взлетать или приземляться на посадочную площадку, опираясь на шасси, при этом посадочная площадка выполнена поворачивающейся вокруг шарнира на заранее установленный угол стыковки, соответствующий шагу ротора, посадочная площадка установлена на поворотной платформе наверху конструкции или сооружения, выбранного из группы, включающей здания, сооружения башенного типа и вышки, баржи, бакены, морские и речные суда. В предпочтительном варианте исполнения устройство дополнительно содержит посадочное устройство с ограничительной щелью; два опорных рычага, при этом каждый рычаг имеет ближний конец и дальний конец, опорные рычаги своими дальними концами подвижно прикреплены к посадочному устройству; пустотелую поворотную платформу, причем опорные рычаги своими ближними концами подвижно прикреплены к платформе; первый и второй управляющие тросы, заведенные в ограничительную щель и предназначенные для управления креном и шагом ротора, первый и второй управляющие тросы сведены в узел и далее образуют фал; и направляющий блок, жестко закрепленный к поверхности, выбранной из группы, включающей здания, сооружения башенного типа и вышки, баржи, бакены, речные и морские суда, причем направляющий блок размещен непосредственно под поворотной платформой в центре, первый конец фала заведен через направляющий блок. Кроме того, устройство дополнительно содержит складирующее устройство, выполненное для выборочного снятия каждой рамы с соответствующего ротора на наземной станции, складирующее устройство выполнено для укладки роторов непосредственно один к одному с вставкой прокладочного материала между ними для последующего хранения, устройство дополнительно выполнено для обеспечения перемещения или перегруппировки любой рамы с соответствующим ей ротором; и захватное устройство, выполненное для присоединения рамы к втулке ротора, захватное устройство выполнено для выборочной фиксации рамы в заранее определенной точке фала. Помимо прочего, первое управляющее устройство включает регулятор, выполненный для осуществления притягивания передней консоли гироглайдера вниз или ее освобождения с целью придания консоли степени свободы для движения вверх в целях управления шагом гироглайдера, регулятор выполнен с возможностью увеличения или сокращения расстояния от самого регулятора до оконечностей плечей рычага управления креном, рычаг управления креном имеет плечи рычага по обеим сторонам гироглайдера в целях управления креном гироглайдера; и уздечку, содержащую первый тросик управленияшагом и второй тросик управления шагом, соединенные с передней консолью и задней частью рамы гироглайдера соответственно, тросики далее соединены с управляющим устройством; и первый тросик управления креном и второй тросик управления креном, каждый из тросиков соединен с оконечностями плечей рычага управления креном, тросики далее соединены с управляющим устройством. В предпочтительном варианте первое управляющее устройство включает по меньшей мере одно устройство управления креном, выбранное из группы, содержащей зубчатую направляющую, гидроцилиндр, тросик и металл с памятью формы, смонтированное в нижней части рамы в совокупности, как минимум, с одним сервоприводом; уздечку, состоящую из первого и второго управляющих тросиков, данные тросики имеют ближний и дальний концы, дальние концы первого и второго тросиков соединены с задней и передней частями рамы соответственно, ближний конец первого управляющего тросика соединен с задней частью рамы посредством сервопривода, ближний конец второго управляющего тросика соединен с передней частью посредством другого сервопривода в случае наличия двух устройств управления креном; и управляющее устройство, соединенное с ближними концами первого и второго управляющих тросиков, выполненное для натяжения или ослабления первого управляющего тросика и второго управляющего тросика для управления шагом, управляющее устройство выполнено совместно с сервоприводом для натяжения или ослабления первого и второго управляющих тросиков посредством перемещения влево или вправо по отношению к раме для управления креном. В обычном исполнении управляющее устройство выбрано из группы, состоящей из системы компьютеризированного управления и автопилота. Одной из отличительных особенностей настоящего устройства является то, что устройство содержит зубчатую направляющую с сервоприводом, установленную в нижней части рамы; и грузовой отсек, содержащий аккумуляторную батарею и иное бортовое оборудование, отсек установлен с возможностью скольжения вперед и назад для изменения центра тяжести (ЦТ) в целях контролируемого свободного полета. Дополнительно устройство оснащено горизонтальным стабилизатором, установленным в хвостовой части гироглайдера, стабилизатор имеет рули для обеспечения создания противодействующей силы, направленной вниз, для уравновешивания подъемной силы в центре давления (ЦД) ротора, в целях контролируемого свободного полета. В соответствии с настоящим изобретением, могут быть спроектированы и построены системы сбора метеоданных, радиолокационные системы, системы пожарообнаружения, системы слежения за наземными объектами, системы средств связи и трансляционных усилителей мобильной связи, с применением гироглайдера в качестве ключевого звена таких систем. В предпочтительном варианте осуществления настоящего изобретения устройство снабжено накопительным устройством, содержащим: контейнер с глухой цилиндрической стенкой и открытой верхней поверхностью, контейнер имеет диаметр, чуть больший диаметра рулона полностью смотанного фала, причем на цилиндрическую стенку контейнера нанесено покрытие для уменьшения трения и теплообразования; центральный валик с цилиндрической стенкой, валик обеспечивает заполнение объема и установлен соосно внутри контейнера, валик определяет свободный объем для укладки фала между валиком и стенкой контейнера, объем для помещения фала достаточен для укладки в предопределенном порядке аккуратными ровными витками и обеспечивает отсутствие перехлестов и скручиваний фала при его размещении в контейнере, на цилиндрической стенке вала выполнено покрытие; и ведущий ролик, направляющий блок и направляющая выполнены для укладки фала через центр верхней открытой поверхности в контейнер с заранее установленной скоростью и только в одном направлении. В предпочтительном варианте выполнено тефлоновое покрытие. В обычном исполнении ведущий ролик для укладки фала в контейнер выполнен вращающимся как по часовой, так и против часовой стрелки. В предпочтительном исполнении ведущий ролик выполнен с возможностью подъема или опускания в контейнер и подъема или опускания центрального валика для уменьшения расстояния схода фала с ролика в контейнер. В предпочтительном исполнении для выборки и хранения фала используется накопительное уст-6 019501 ройство в соответствии с вышеописанным в настоящем документе. Колесное транспортное средство или судно могут приводиться в действие гироглайдером в соответствии с настоящим изобретением. В предпочтительном исполнении тяговая лебедка соединена с преобразователем посредством муфты и маховика, муфта и маховик выполнены для стабилизации частоты вращения и передачи крутящего момента на вход преобразователя. В частности, контроллер выполнен для управления гироглайдером в соответствии с сигналами навигационной системы, установленной на гироглайдере, навигационная система выбрана из группы, содержащей систему глобального позиционирования и устройство определения местоположения по радиомаякам, контроллер выполнен с возможностью исключения помех от воздействия навигационной системы, установленной на другом гироглайдере. В предпочтительном варианте контроллер выполнен для управления гироглайдером в соответствии с сигналами навигационной системы, установленной на гироглайдере, навигационная система выбрана из группы, содержащей систему глобального позиционирования и устройство определения местоположения по радиомаякам, контроллер выполнен с возможностью исключения помех от воздействия навигационной системы, установленной на другом гироглайдере. В предпочтительном варианте гироглайдер, в соответствии с вышеприведенным описанием, также содержит устройство изменения угла крена ротора, определяемого углом между вертикальной осью гироглайдера и вертикальной плоскостью к поверхности земли, включающей продольную ось гироглайдера; и устройство для управления маневрированием гироглайдера, устройство выполнено для обеспечения маневрирования гироглайдера при боковом ветре таким образом, что возникает скорость бокового отклонения, причем возникшая относительная скорость превышает скорость окружающего воздушного потока, что приводит к натяжению фала. В соответствии с настоящим изобретением предусматривается способ получения электроэнергии,содержащий следующую совокупность действий: обеспечение наличия не менее одного гироглайдера, содержащего ротор с несколькими лопастями,ротор подвижно закреплен на раме, ротор имеет шаг ротора, характеризующийся траекторией ротора по отношению к набегающему воздушному потоку и шаг лопасти, определяемый соответственно для каждой из лопастей углом наклона лопасти по отношению к набегающему воздушному потоку; обеспечение наличия фала, заведенного на тяговую лебедку, фал имеет первый и второй концы; размещение первого конца фала непосредственно на земле, второй конец вытягивается вверх, закрепление гироглайдера на втором конце фала; подключение тяговой лебедки к преобразователю; измерение натяжения, существующего или дополнительно возникшего в фале; измерение скорости воздушного потока, воздействующего на гироглайдер; систематический контроль натяжения фала и формирование выходных данных об уровне натяжения; выполнение запуска и полета гироглайдера, в ходе которого осуществляется селективное управление шагом ротора в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; осуществляется селективное управление шагом лопастей в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; и осуществляется управление натяжением фала посредством перемежающихся циклов его сматывания или ослабления, выполняемых преобразователем, причем в последнем случае преобразователь работает в режиме реверса, в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; и преобразование вращательной энергии тяговой лебедки в электрическую энергию. В предпочтительном варианте гироглайдер закрепляется на фале с размещением на некотором расстоянии от другого гироглайдера в ряду гироглайдеров на фале в случае, когда в соответствии с настоящим изобретением используется более одного гироглайдера. В предпочтительном варианте управление полетом гироглайдера, в ходе которого возникает натяжение фала, осуществляется посредством автопилота. В обычном варианте управление полетом гироглайдера, в ходе которого возникает натяжение фала,осуществляется посредством автопилота в соответствии с данными о положении и координатах гироглайдера, полученными установленной на гироглайдере навигационной системой, причем навигационная система защищена от помех, возникающих при работе навигационных систем других гироглайдеров в случае одновременного полета более одного гироглайдера. В обычном варианте селективное управление шагом ротора осуществляется в увязке с управлением шагом каждой лопасти. В предпочтительном варианте селективное управление шагом ротора включает обеспечение коллинеарности опоры ротора с осью вращения ротора; и управление углом наклона опоры ротора относительно рамы. В предпочтительном варианте селективное управление шагом ротора включает управление продольным и поперечным креном гироглайдера. Дополнительно, селективное управление шагом ротора включает управление продольным креном гироглайдера. В обычном варианте селективное управление шагом лопасти включает пассивное управление отклонением каждой лопасти вверх за счет установки устройств отклонения лопастей в виде упругих силовых элементов, вызывающих поворот лопастей по направлению к оси вращения. В обычном варианте селективное управление шагом лопасти включает воздействие на лопасти центробежной силы, увеличивающейся с увеличением скорости вращения ротора и противодействующей усилию натяжения в устройстве отклонения каждой лопасти, данное воздействие выравнивает лопасти. Возможен альтернативный вариант, когда селективное управление шагом лопасти включает активное управление отклонением каждой лопасти вверх за счет установки устройств отклонения лопастей в виде сервоприводов, вызывающих поворот лопастей по направлению к оси вращения. В предпочтительном варианте селективное управление шагом лопасти включает одновременное применение активного и пассивного управления. В соответствии с изобретением управление натяжением фала включает уменьшение натяжения понижением шага лопасти и увеличение натяжения увеличением шага лопасти. В предпочтительном варианте отличительным признаком настоящего изобретения является то, что селективное управление шагом лопасти включает уменьшение или увеличение шага лопасти относительно шага ротора. В предпочтительном варианте вышеописанный способ далее включает предварительную раскрутку ротора (преротация ротора) набегающим воздушным потоком установкой отрицательного значения шага лопастей; и передачу энергии набегающего воздушного потока лопастям, при этом ротор работает, как минимум, в качестве ветрогенератора или ветротурбины. Способ получения энергии далее включает активное управление гироглайдером путем селективного поворота лопастей из положения работы в режиме турбины (отрицательный шаг лопастей) в положение авторотации (положительный шаг). Способ получения энергии дополнительно содержит наличие поворотной платформы, соединенной с ротором и обеспечивающей вращение ротора; и возможность поворота платформы относительно рамы. В предпочтительном варианте селективное управление шагом ротора включает наличие поворотной платформы, которая может поворачиваться относительно рамы так, что отношение подъемной силы к сопротивлению равно отношению длины смещения центра вращения ротора к высоте смещения центра вращения ротора, которые заданы расстоянием от оси вращения ротора до оси вращения шарнира поворотной платформы и высотой центра вращения ротора над осью вращения шарнира соответственно. В предпочтительном варианте способ получения энергии далее включает подтягивание гироглайдера посредством работы тяговой лебедки в связи с падением скорости набегающего воздушного потока ниже порогового значения, а также подтягивание гироглайдера с относительной скоростью, достаточной для управляемого полета гироглайдера по направлению к лебедке. Способ получения энергии также включает полет гироглайдера в режиме спуска непосредственно к лебедке в связи с падением скорости набегающего воздушного потока ниже порогового значения, требующегося либо для управляемого полета, либо для производства энергии. Способ получения энергии далее включает управление натяжением фала путем реагирования ротора на изменение натяжения, при этом шаг лопастей ротора уменьшается при увеличении натяжения и увеличивается при падении натяжения. Отличительным признаком настоящего изобретения является то, что селективное управление шагом лопастей включает взаимосвязь шага лопасти с углом конусности лопастей ротора, угол конусности представляет собой угол между осью лопасти и осью вращения ротора. Еще одним отличительным признаком настоящего изобретения является то, что селективное управление шагом лопастей включает взаимосвязь шага лопасти с углом конусности лопастей ротора, угол конусности представляет собой угол междуосью лопасти и осью вращения ротора; селективное управление шагом лопастей также включает осуществление изменения угла конусности, которое производится посредством изменения равновесия сил, действующих на лопасти со стороны фала и набегающего воздушного потока. В соответствии с настоящим изобретением, предлагаемый способ производства энергии дополнительно включает наличие шасси, установленного на раме; размещение посадочной поверхности в непосредственной близости от тяговой лебедки, посадочная поверхность закрепляется на полой объемной поверхности; протягивание фала от лебедки через щель в посадочной поверхности; вытягивание фала лебедкой через полую объемную поверхность; касание посадочной поверхности по меньшей мере одной из стоек шасси при посадке гироглайдера на посадочную поверхность; и позиционирование ротора для вращения в плоскости, параллельной посадочной поверхности путем поворота рамы вследствие касания посадочной поверхности по меньшей мере одной из стоек шасси. В соответствии с настоящим изобретением способ производства энергии дополнительно включает: размещение контрольно-измерительного оборудования и аппаратуры на раме; и поддержание гироглайдера на достаточно большой и постоянной высоте. В предпочтительном варианте настоящего изобретения селективное управление шагом ротора включает управление шагом ротора при приближении ротора к посадочной поверхности в ходе посадки. Способ генерации энергии дополнительно включает размещение множества гироглайдеров на фале с единственной тяговой лебедкой; полет множества гироглайдеров на высоте; посадка множества гироглайдеров на посадочную поверхность; возвращение каждого гироглайдера из множества гироглайдеров в индивидуальном порядке и по одному; снятие каждого из гироглайдеров с фала по одному; снятие каждой рамы с соответствующего ротора; укладка роторов непосредственно один к одному с вставкой прокладочного материала между ними для последующего хранения; и перемещение или перегруппировка каждой рамы из совокупности гироглайдеров с соответствующим ей ротором. Еще одним отличительным признаком настоящего изобретения является то, что способ получения энергии дополнительно включает обеспечение установки двигательного устройства, выбранного из группы, содержащей реактивные двигатели, реактивные сопла, турбинные и винтовые двигатели и моторы, причем двигательное устройство установлено на лопастях; определение критической или внештатной ситуации; и запуск и управление двигательным устройством для осуществления контролируемого полета гироглайдера. Способ получения энергии дополнительно содержит операции по хранению фала: обеспечение наличия контейнера с глухой цилиндрической стенкой и открытой верхней поверхностью с диаметром, немного большим фактического диаметра рулона полностью смотанного фала; нанесение на цилиндрическую стенку покрытия для уменьшения трения и теплообразования; наличие центрального валика, установленного соосно с контейнером; определение объема накопительного пространства между контейнером и вставленным в него валиком, полностью и надлежащим образом смотанный фал должен занимать весь установленный объем накопительного пространства; и укладка фала надлежащим образом в накопительное пространство заранее установленного объема с заранее определенной скоростью укладки с использованием ведущего ролика, направляющего блока и направляющей, выбранных из группы, содержащей перемещаемый или неподвижный узел укладки. В предпочтительном варианте изобретения в процессе полета гироглайдера осуществляются дополнительные действия, содержащие поддержание постоянного шага ротора; изменение угла крена ротора, определяемого углом между вертикальной осью гироглайдера и вертикальной плоскостью к поверхности земли, включающей продольную ось гироглайдера; маневрирование гироглайдером в боковом ветре таким образом, что возникает скорость бокового смещения; создание относительной скорости воздушного потока, набегающего на ротор, превышающей скорость действительного окружающего воздушного потока; и применение маневрирования. Краткое описание прилагаемых чертежей Вышеописанные особенности настоящего изобретения наиболее понятны и полностью очевидны из нижеследующего описания и прилагаемой формулы изобретения во взаимосвязи с прилагаемыми чертежами. Специалисту понятно, что чертежи описывают только типичные варианты осуществления изобретения и не ограничиваются представленным объемом, а описание изобретения дано с дополнительными подробностями и деталями, приведенными в чертежах, на которых на фиг. 1 представлен схематический чертеж системы с использованием гироглайдера 10 в соответствии с первым вариантом настоящего изобретения. Вариант включает один или несколько гироглайдеров, буксируемых фалом, соединенным с тяговой лебедкой, генерирующей энергию. Производство энергии осуществляется вследствие периодических натяжений фала с определенной силой натяжения, пере-9 019501 межающихся ослаблением натяжения и соответствующим втягиванием фала вследствие снизившейся подъемной силы гироглайдера; на фиг. 2 представлена схема чистой результирующей действующих на вращающуюся лопасть ротора на фиг. 1 подъемной силы, силы лобового сопротивления потока и силы тяжести; на фиг. 3 представлен схематический чертеж, иллюстрирующий гироглайдер на фиг. 1, снабженный вертикальным и горизонтальным рулями в соответствии с вариантом настоящего изобретения; на фиг. 4 представлен схематический чертеж системы в соответствии с фиг. 1, иллюстрирующий совокупность гироглайдеров, присоединенных к единому фалу и совместно обеспечивающих результирующее натяжение, принимаемое тяговой лебедкой и устройством генерации энергии, подключенного к лебедке; на фиг. 5 А-5 С представлены виды сбоку одного из характерных вариантов гироглайдера в различных режимах полета, начиная от режима ровного, устойчивого горизонтального полета и заканчивая динамичным режимом для инициации авторотации или запуска гироглайдера; на фиг. 6 представлена аксонометрическая проекция одного из вариантов устройства, имеющего минимальный фюзеляж в виде открытой рамы для гироглайдера в системе на фиг. 1, вариант имеет устройства управления креном и шагом, встроенные между рамой и фалом; на фиг. 7 представлена аксонометрическая проекция одного из альтернативных вариантов гироглайдера для использования в системе в соответствии с изобретением. Вариант содержит малые зубчатые шестерни, перемещающиеся по направляющим, направляющие расположены вдоль и поперек рамы гироглайдера, перемещение шестерен по направляющим вызывает изменения крена и продольного наклона устройства. Одновременно этот вариант имеет также "точку отдыха" на направляющих, относящуюся к управлению шагом устройства, направляющие имеют измененный радиус для обеспечения занятия рамой предпочтительного положения для натяжения фала благодаря наличию на направляющих вышеупомянутой области понижения в месте схождения разных радиусов направляющей; на фиг. 8 представлена аксонометрическая проекция одного из альтернативных вариантов ротора. Вариант имеет максимально упрощенную конструкцию с минимумом механических устройств, соединенных с фалом. В данном варианте управление шагом осуществляется посредством воздействующего устройства, работающего между минимизированной рамой и хвостовой балкой устройства, хвостовая балка соединена с неподвижным внутренним кольцом подшипника втулки ротора гироглайдера; на фиг. 9 представлена аксонометрическая проекция одного из альтернативных вариантов устройства в соответствии с фиг. 8, вариант выполнен с возможностью прохождения фала через втулку ротора гироглайдера с возможностью присоединения другого гироглайдера к этому же фалу выше относительно устройства на фигуре; на фиг. 10 представлена аксонометрическая проекция одного из альтернативных вариантов гироглайдера, аналогичного представленному на фиг. 6. Вариант имеет поворотную платформу, изменяющую свое положение по отношению к раме, что обеспечивает дополнительное управление углом атаки ротора или шагом ротора по отношению к набегающему потоку; на фиг. 11 представлен вид сверху одного из вариантов исполнения ротора, ротор имеет горизонтальные шарнирные соединения лопастей, оси вращения которых скошены по отношению к радиусу,проходящему через центр втулки ротора. Шарнирные соединения обеспечивают возможность совершения каждой отдельной лопастью маховых или хлопающих движений, с возможностью изменения угла атаки лопасти; на фиг. 12 представлен вид сверху одного из альтернативных вариантов исполнения устройства на фиг. 11. Фигура иллюстрирует возможность установки дополнительной схемы генерации электроэнергии, состоящей из магнитов и обмотки, а также реактивных двигателей. Генератор энергии и реактивные двигатели могут использоваться как одновременно, так и порознь. Генератор электроэнергии может быть применен для выработки дополнительной энергии, необходимой для питания бортового оборудования винтокрылого летательного аппарата, например, автопилота или управляющих устройств, в то время как реактивные двигатели могут использоваться для повышения управляемости полета во время взлета, приземления и так далее; на фиг. 13 представлен вид сверху одного из альтернативных вариантов исполнения ротора. Ротор имеет центральную втулку и шарнирные соединения между рукавами или выгонами втулки ротора и лопастями. В этом случае оси вращения шарнирных соединений выполнены перпендикулярно радиусу,проходящему через центр втулки ротора, но сами лопасти скошены под углом в направлении движения передней кромки лопасти вместо скосов рукавов втулки; на фиг. 14 представлена аксонометрическая проекция одного из альтернативных вариантов исполнения ротора, с частичным усечением лопастей для увеличения размеров ротора на фигуре. Втулка ротора имеет проушины, с помощью которых комель лопасти подвешен на опорном шарнире, опорный шарнир закреплен в проушинах. Лопасть ротора может поворачиваться вокруг опорного шарнира; на фиг. 15 А-15 В представлены виды сбоку альтернативного варианта гироглайдера в соответствии с изобретением, имеющего привязную раму, поддерживающую ротор. На роторе установлены отклоняющие устройства, а именно пружины, механические приводы, сервоприводы и тому подобное для от- 10019501 клонения каждой лопасти в верхнее положение. Таким образом, благодаря скосу лопасти или наличию лопастного шарнира, угол атаки лопасти связан с углом конусности ротора или углом подъема каждой лопасти по отношению к втулке, выходящим за пределы нормальной плоскости теоретического вращения втулки и лопастей ротора; на фиг. 16-17 представлены аксонометрические проекции устройства запуска и приземления, иллюстрирующие некоторые дополнительные усовершенствования, способствующие запуску и приземлению гироглайдера. Устройство снабжено добавочным поворотным кругом для разворота гироглайдера по ветру или позволяющее вертикальному оперению гироглайдера развернуть гироглайдер вместе с поворотным кругом по ветру при взлете или посадке. Данное устройство также содержит качающуюся посадочную площадку, установленную на поворотном круге. Это позволяет стойкам шасси гироглайдера соприкасаться с посадочной площадкой без изменения угла атаки ротора в зависимости от угла набегающего воздушного потока. В противном случае гироглайдер может приземляться только под определенным углом, подходящим для углов фала и винта. После посадки на качающуюся посадочную площадку гироглайдер закрепляется на ней, площадка затем может быть развернута под любым необходимым углом для хранения, обслуживания гироглайдера и так далее; на фиг. 18 представлена аксонометрическая проекция одного из альтернативных вариантов системы гироглайдера, иллюстрирующая схему подключения лебедки и двигатель-генератора. Данная лебедочная система также включает устройства для спуска гироглайдера на землю или управления контролируемым снижением и разборки гироглайдеров, с последующим снятием рам гироглайдеров с фала, причем роторы остаются на фале для компактного хранения, в то время как рамы или фюзеляжи гироглайдеров хранятся в другом или неподалеку расположенном месте; на фиг. 19 представлена аксонометрическая проекция одного из вариантов гироглайдера на фиг. 18,детализирующая схему соединения рамы и ротора; на фиг. 20 представлена блок-схема алгоритма управления натяжением фала; на фиг. 21 А-21D представлены виды сверху, сбоку и спереди гироглайдера, а также аксонометрическая проекция гироглайдера соответственно, с системой тросового управления, одновременно соединяющей гироглайдер с фалом и предназначенной для управления шагом, креном или и тем и другим одновременно путем натяжения или ослабления тросиков, соединенных с различными диаметрально противоположными точками гироглайдера; на фиг. 22 А представлено накопительное устройство с ведущим роликом, который вращается по часовой стрелке или против часовой стрелки с целью заведения и укладки фала в контейнер; на фиг. 22 В представлено накопительное устройство с ведущим роликом, который поднимает или опускает центральный валик для минимизации расстояния укладки фала в контейнер; на фиг. 23 представлен гироглайдер в соответствии с одним из вариантов настоящего изобретения со смещаемым центром тяжести (ЦТ) и альтернативным конструктивным вариантом опущенного вниз горизонтального стабилизатора для управления устойчивостью; на фиг. 24 представлено посадочное/стартовое устройство, предназначенное для запуска или посадки гироглайдера, устройство может быть установлено на здании, барже или судне; на фиг. 25 представлено устройство управления креном гироглайдера с двумя тросиками - управлениями в соответствии с одним из вариантов настоящего изобретения; на фиг. 26 представлено устройство с использованием гироглайдера в соответствии с настоящим изобретением, устройство снабжено маховиком и муфтой для выравнивания частоты вращения при генерации энергии; на фиг. 27 А представлена графическая зависимость скорости относительного воздушного потока от времени, на графике дано сравнение скоростей относительного воздушного потока, воздействию которого подвергается гироглайдер, при совершении бокового маневрирования и без такового; на фиг. 27 В представлена графическая зависимость угла крена ротора гироглайдера от времени в ходе осуществления бокового маневрирования; на фиг. 27 С представлена графическая зависимость шага ротора гироглайдера от времени в ходе осуществления бокового маневрирования; На фиг. 27D представлена графическая зависимость бокового маневрирования от маневрирования снижением гироглайдера в ходе осуществления бокового маневрирования; и на фиг. 27 Е представлена графическая зависимость высоты от бокового маневрирования в ходе осуществления бокового маневрирования. Подробное описание прилагаемых чертежей Специалистам в данной области техники полностью понятно, что настоящее изобретение и различные варианты его использования, в общем виде изложенные в настоящем документе и проиллюстрированные прилагаемыми чертежами, могут быть осуществлены, спроектированы, сконструированы или выполнены с учетом широкого диапазона их различных изменений и модификаций. Нижеследующее подробное описание вариантов системы и способа осуществления настоящего изобретения, проиллюстрированные прилагаемыми чертежами, никоим образом не ограничивает объем и сущность настоящего изобретения, а служит исключительно для пояснения вариантов настоящего изобретения. Варианты на- 11019501 стоящего изобретения совершенно понятны специалисту при обращении к прилагаемым чертежам, на которых соответствующим частям, деталям, узлам и компонентам в описании присвоен сквозной номер позиции. Летательный аппарат типа автожир достаточно подробно описывается в патенте США 5301900,Гроен и др. (Groen et al.), который включен в настоящую заявку посредством ссылки. Также в многочисленных патентах Сиервы (de la Cierva), Питкэйрна (Pitcairn), Барлтропа (Barltrop) и других исследователей отражены различные варианты использования ветровой энергии. Ниже в настоящем документе изложено описание настоящего изобретения и вариантов его осуществления, проиллюстрированных прилагаемыми чертежами. Термины "ветер" или "воздушный поток" в настоящем описании изобретения используются для именования текучей среды, например атмосферного воздуха, влажного воздуха и жидкостей, включая воду. В соответствии с фиг. 1 и принимая во внимание фиг. 1-21, по меньшей мере один гироглайдер 12 соединен с фалом 14. Гироглайдер 12 в соответствии с изложенным в патентной заявке означает один или множество гироглайдеров, образующих систему гироглайдеров. Фал 14 выполнен из природного или синтетического материала. Фал 14 является стальным тросом или канатом, сплетенным из синтетических полимерных волокон. Например, синтетические шнуры торговой марки Дайнима могут быть сплетены в канаты различного диаметра. В качестве фала могут также быть использованы канаты на основе сверхпрочных, сверхстойких термически и огнестойких волокон, например, Дюпон М 5, или канаты на основе углеродных нанотрубок. Данные материалы характеризуются в высшей степени длительным сроком эксплуатации, надежностью, высокой прочностью, подходящими характеристиками износостойкости и обладают легким весом по сравнению со стальными тросами и аналогичными им изделиями. Фал 14 намотан на устройство для натяжения или тяговую лебедку 16, предпочтительно в виде бобины, катушки, барабана и тому подобное. Лебедка 16 выполнена для обеспечения выборки фала 14 и его послойной, методичной и равномерной укладки. Благодаря современным технологиям в области производства кабелей, тросов и канатов, а также проектирования рыболовных бобин и других устройств подобного назначения решена проблема втягивания или намотки на барабан, катушку или бобину так,что укладка происходит аккуратно, ровно и последовательно без проблем для последующей размотки. Концепция "веревочного накопителя", "альпинистской спасательной веревочной сумки" или "пожарной спасательной веревочной сумки" заключается в том, что для хранения веревки используется веревочная сумка, полностью закрытая и имеющая точный объем полностью смотанной веревки, сумка имеет небольшое отверстие для втягивания и разматывания веревки. Когда веревка 100-метровой длины вытягивается через это небольшое отверстие, она не запутывается и может быть смотана назад через то же отверстие. Веревка размещена в сумке таким образом, что первый конец веревки, вставленный в отверстие, будет последним при полностью размотанной веревке. Обычные способы наматывания и хранения канатов заключаются в наматывании каната на большой вращающийся барабан с укладочным устройством, которое обеспечивает укладку троса аккуратными ровными витками и отсутствие перехлестов и скручиваний. Использование в соответствии с настоящим изобретением традиционных методов наматывания и сматывания каната создает ряд проблем. Вопервых, в любых вариантах исполнения настоящего изобретения, фал заведен на барабан лебедки в несколько витков для передачи натяжения фала во вращательное движение лебедки для производства энергии. Лебедка также используется в качестве реверсивного устройства для наматывания фала. После прохождения лебедки фал имеет минимальное остаточное натяжение. Фал длиной приблизительно в 10 км весит около 25000 кг. После прохождения лебедки в случае, если фал наматывается на большой барабан с устройством поперечной намотки, известный специалистам в данной области, барабан должен быть достаточно большим, что приведет к затратам значительного количества энергии вследствие того, что потребуется аккуратная намотка/размотка всего этого веса со скоростью порядка 40 км/ч. Вопросы, связанные с торможением системы в случае, когда применяются общепринятые методы намотки, также поднимают ряд проблем при использовании гироглайдера в соответствии с настоящим изобретением. В соответствии с настоящим изобретением используется накопительное устройство, показанное на фиг. 22 А и 22 В, применение которого решает вышеописанные и существующие в данной области проблемы. После прохождения фалом 14 через барабан лебедки 16 и полного снижения высокого уровня натяжения в фале, фал 14 укладывается силой тяжести в цилиндрический контейнер 2. Фал 14 направляется в контейнер 2 с помощью ведущего ролика, натяжного блока и направляющих. Диаметр контейнера 2 точно рассчитывается таким образом, чтобы незначительно превышать фактический диаметр рулона полностью свернутого фала 14. Например, фактический диаметр рулона свернутого фала при диаметре фала в 5 см составляет 1,5 метра. Поэтому контейнер проектируется диаметром 1,6 м и высотой, достаточной для хранения всего объема смотанного каната, например, высотой 10 м. Центральный валик 4 с цилиндрической стенкой установлен соосно в большом контейнере диаметром 1,6 м. Центральный валик 4 имеет приблизительный диаметр 0,5 м для предотвращения перехлестов или возникновения "восьмерок" фала при его укладке в контейнер 2. Ведущий ролик 6, подающий или "вверчивающий" фал 14 в контейнер 2, установлен приблизительно наверху центрального валика 4. В соответствии с вариантом, приведенным на фиг. 22 А, ведущий ро- 12019501 лик 6 вращается по часовой стрелке или против часовой стрелки, вводя или выводя фал 14 из пустого пространства между двумя цилиндрами. Устройство устанавливается либо под землей, либо встраивается в высотные сооружения или в конструкции барж или судов. Когда начинается рабочий ход (вытягивание фала), фал 14 направляется и вытягивается из контейнера 2 посредством ведущего ролика 6, который поддерживает противонатяжение фала, проходящего через лебедку 16 для обеспечения передачи энергии. В случае обратного хода (втягивание фала) лебедка 16 тянет фал 14 вниз, а ведущий ролик 6 по-прежнему поддерживает противонатяжение фала на выходе с лебедки 16, при этом продолжая равномерно раскладывать фал 14 по кругу в контейнере 2. Такое накопительное устройство потребляет очень мало энергии. Внутренняя стенка контейнера 2 и поверхность центрального валика 4 покрыты тефлоном или другим антифрикционным материалом, сводящим к минимуму трение и теплообразование. Вследствие этого отвод тепла происходит очень быстро и практически отсутствуют потеря энергии и инерционный момент; вытягивание и укладка фала могут производиться с постоянной и бесконечной реверсивностью. Накопительное устройство в соответствии с настоящим изобретением имеет крайне простую механику и экономически выгодно. Более того, так как решена проблема теплоотвода, работа накопительного устройства никак не отражается на продолжительности полезного использования фала. В соответствии с вариантом, приведенным на фиг. 22 В, ведущий ролик 6 и, соответственно, центральный валик 4 вместе поднимаются или опускаются внутри накопительного контейнера 2 с целью минимизации расстояния опускания фала 14 от ведущего ролика 6 до слоя укладки внизу контейнера 2. Поддержание короткого расстояния опускания фала 14 существенно снижает вероятность его спутывания. Соединительное устройство 17 обеспечивает механическое соединение лебедки 16 с преобразователем 18. Преобразователь 18 обычно является устройством, которое соответствующим образом преобразует вращательную энергию, получаемую от вращения лебедки 16, в передаваемую форму, накапливаемую форму или одновременно в обе. Соответственно, преобразователь 18 является электрогенератором, гидравлическим двигателем или газовым компрессором. Когда преобразователь 18 работает в качестве электрогенератора, вращательная энергия, вырабатываемая тяговой лебедкой 16 и передаваемая преобразователю через соединительное устройство 7, преобразуется в электрическую энергию, пригодную для последующей передачи в местные электрические сети, сети штата или в национальную электрическую распределительную сеть. Система 10 функционирует вследствие полета гироглайдера 12 вверх, что вызывает натяжение в фале 14. Соответственно, сила натяжения, приложенная на расстоянии посредством фала, производит работу. Это количество работы, затраченное в единицу времени, представляет собой мощность. Соединительное устройство 17 передает мощность преобразователю 18, основанную на натяжении фала 14 и вращательном движении лебедки 16. Таким образом, гироглайдер 12, поднимаясь за счет своей подъемной силы, прикладывает силу к фалу 14, это усилие передается в качестве мощности, основанной на натяжении фала 14 посредством лебедки 16 преобразователю 18, посредством преодоления его сопротивления. Гироглайдер 12 подтягивается фалом 14 посредством работы преобразователя 18 в реверсивном режиме. Например, если преобразователь 18 является двигателем-генератором, он работает в качестве электродвигателя при подаче на его входы питания, а в случае приложения механической нагрузки работает в качестве генератора, приложенная нагрузка выводится в виде электрической энергии из такого устройства, работающего в режиме генератора. Гироглайдер 12 управляется с использованием компьютеризированного устройства управления или автопилота. При периодически перемежающихся операциях(режим двигателя и режим генератора), преобразователь 18 работает в качестве двигателя тогда, когда устройство управления гироглайдером 12 опускает гироглайдер вниз, поддерживая минимальное натяжение фала 14. Таким образом, чистый выигрыш получаемой энергии складывается из разницы между сравнительно высоким натяжением фала 14, которое вызывается одним или совокупностью гироглайдеров 12, вытягивающих фал 14 с приложением к нему значительного усилия, и сравнительно небольшим усилием к фалу 14 в случае, когда один или совокупность гироглайдеров 12 снижаются к поверхности земли при подтягивании фала 14 лебедкой 16. Соответственно, в ходе вытягивания фала 14 возникает сравнительно большая сила, обеспечивающая мощность. Сравнительно небольшая мощность используется при подтягивании фала 14 лебедкой 16 при подготовке к последующему подъему гироглайдера 12. В соответствии с вариантом, представленным на фиг. 1, направление воздушного потока 20 в общем случае считается направленным параллельно земной поверхности, а гироглайдер 12 обычно ориентирован против направления воздушного потока 20. Гироглайдер 12 является винтокрылым летательным аппаратом. В предпочтительном варианте настоящего изобретения, каждый гироглайдер 12 имеет винт-крыло или несущий винт, именуемый ротором 22. Вращение ротора 22 приводит к возникновению эффекта авторотации. Ротор 22 вращается в некоторой плоской области около плоскости вращения 28. Практически, некоторые роторы могут иметь степень свободы, позволяющую им буквально при вращении описывать лопастями некую коническую конфигурацию. В общем случае фал 14 вытягивается в направлении 24. Стрелка 24 а показывает движение фала 14 вверх при его вытягивании гироглайдером 12, работающего с максимальной подъемной силой на вытягивание фала 14 с лебедки 16. Стрелка 24b показывает направление, в котором фал 14 сматывается при падении натяжения в ситуации, когда гироглайдер 12 вынужден снижаться с минимальной подъемной силой. Практически, направление 24 может незначительно изменяться в ходе движения вдоль своего пути. Фал 14 имеет определенный вес, соответственно, траектория движения фала не является прямой и может иметь некоторый прогиб. Тем не менее, в любой точке вдоль фала 14 выдерживается направление 24. Направление 24 также помогает определить угол 26 между направлением 24 фала 14 и нулевым уровнем отсчета координат, например, поверхностью земли. В силу этого, направление воздушного потока 20 образует угол 26 с направлением вытягивания фала 24. Угол 26, таким образом, определяет взаимосвязь с относительным направлением воздушного потока 20. Обычно ротор 22 и плоскость вращения ротора 28 образуют угол 30 с направлением воздушного потока 20. Таким образом, гироглайдер 12 зависит от положительного угла 30, под которым ротор омывается набегающим воздушным потоком, вызывающим самовращение или авторотацию ротора 22. Авторотация ротора 22 потоком 20 воздействует на каждую лопасть 32 (фиг. 2) ротора 22 подобно тому, как ветер надувает парус лодки. Чистое усилие передается лопасти 32 (фиг. 2) потоком 20 в силу изменения потоком своего направления, что заставляет лопасть 32 (фиг. 2) двигаться в направлении, противоположном отклонению ветра. Таким образом, вращение отдельных лопастей 32 (фиг. 2) каждого ротора 22 приводит к возникновению чистой скорости каждой лопасти 32 (фиг. 2). Каждая лопасть 32 (фиг. 2) выполнена в форме авиакрыла, что приводит к более высокой скорости движения воздушного потока сверху лопасти 32 по сравнению с более медленной скоростью движения под лопастью 32. В соответствии с эффектом Бернулли над лопастью 32 давление всегда будет меньше давления под лопастью 32, что приводит к появлению подъемной силы лопасти 32. Таким образом, отдельный ротор 22 движется вперед подобно вертолету за счет потока, проходящего снизу вверх через ротор 22. В соответствии с фиг. 2, лопасть 32 ротора 22 обычно вращается в плоскости, примерно совпадающей с плоскостью вращения 28. Когда лопасть ротора 32 вращается с очень маленькой скоростью, набегающий поток 20 изменяет шаг лопасти 32 или угол атаки лопасти 40. Таким образом, ротор 22, если он снабжен лопастями с возможностью совершения маховых движений, может во время вращения формировать фигуру, похожую на конус, нежели чем на плоский круг. Тем не менее, любая точка на лопасти ротора может считаться вращающейся в определенной плоскости. Таким образом, если посмотреть на лопасть 32 на фиг. 2, с осью вращения 34, то направление движения лопасти вперед 36 остается противоположным направлению движения лопасти назад 38, которое лопасть проходит во время своего вращения. Таким образом, набегающий поток 20 ниже лопасти 32 приводит к возникновению угла атаки лопасти 40, характеризуемому небольшим наклоном лопасти 32 по отношению к набегающему потоку. Угол атаки лопасти 40 может быть описан как направление хорды лопасти 42 по отношению к направлению потока 20. Этот угол 40 и определяет угол атаки 40. В соответствии с эффектом Бернулли, описываемом уравнением Бернулли, прохождение воздушного потока 20 сверху лопасти 32 приводит к падению давления над верхней плоскостью лопасти 32, таким образом возникает подъемная сила. Подъемная сила 46 направлена вверх, в то время как поток 20 также действует в качестве лобового сопротивления в отношении лопасти 32. Поэтому лопасть подвергается воздействию силы лобового сопротивления 44, совпадающего с направлением потока 20, в то время как подъемная сила 46 действует перпендикулярно к ней, стремясь приподнять лопасть 32. В общем, можно предположить, что ветер действует у поверхности Земли на сравнительно малых высотах и поэтому направлен преимущественно горизонтально по отношению к Земле. Как показано на фиг. 2, сила тяжести не параллельна оси вращения 34 лопасти 32 и ротора 22. Наоборот, гравитационная сила 48 действует, как показано на фиг. 2, потому что лопасть 32 обычно ориентирована с положительным углом атаки 40 по отношению к набегающему потоку, который должен проходить по нижней или рабочей стороне лопасти 32. Результирующая сила 50 является равнодействующей всех сил, действующих на лопасть 32, а комбинация всех сил 50, воздействующих на различные лопасти 32, которых может быть 2, 4, 5 или больше,приводит к возникновению суммарной силы. Направление полета гироглайдера 12 обычно происходит против набегающего потока 20. В основании этого лежит предположение о том, что направление ветра обычно параллельно поверхности Земли. Например, летательный аппарат летит на некоторой высоте по отношению к поверхности Земли. В свободном полете гироглайдера без фала результирующая сила направлена вверх, благодаря подъемной силе, но назад в направлении, противоположном направлению движения, вследствие действия силы лобового сопротивления. При свободном полете самолета сила лобового сопротивления преодолевается силой тяги двигателя, установленного спереди или сзади самолета. В соответствии с настоящим изобретением, фал 14 и натяжение в нем обеспечивают воздействие силы, уравновешивающей действие подъемной силы 46 и силы лобового сопротивления 44. Соответственно, результирующая сила 50 является силой, способной поднять гироглайдер, а также поддерживать натяжение в фале 14. В соответствии с фиг. 3, гироглайдер 12 снабжен рамой или фюзеляжем 52. Рама обычно предназначена для несения полезной нагрузки, установки оборудования и так далее. Такая рама, имеющая обшивку, обычно называется фюзеляжем. Тем не менее, термины "рама" и "фюзеляж" в настоящей заявке используются взаимозаменяемо, а в прилагаемых чертежах имеют номер позиции 52. В соответствии с вариантом настоящего изобретения, рама или фюзеляж 52 снабжен рулем направления, или вертикальным рулем 54 и горизонтальным рулем 56. Вертикальный руль 54 работает в качестве руля направления, а горизонтальный руль 56 работает в качестве руля высоты. Установкой вертикального руля 54, горизонтального руля 56 или обоих рулей одновременно на задней оконечности хвостовой балки 58 (фиг. 4). Противоположный конец хвостовой балки 58 (фиг. 4) соединяется непосредственно с рамой или фюзеляжем 52. Вертикальный руль 54 и горизонтальный руль 56 дают значительное преимущество при ориентации фюзеляжа или рамы 52 по отношению к потоку 20 и ротору 22. В определенных вариантах ротор 22 вращается на или вокруг опоры 60 (фиг. 4). Опора 60(фиг. 4) выполнена для соединения ротора 22 с фюзеляжем 52. Так как ротор 22 работает в качестве вращающегося крыла, не требуется передачи никакой энергии через опору 60. Поэтому ротор 22 вращается на подшипнике, установленном своим внутренним кольцом на опоре 60 (фиг. 4). В альтернативном варианте, опора 60 устанавливается на системе подшипников таким образом, что опора 60 (фиг. 4) сама имеет возможность поворачиваться или даже вращаться вместе с лопастями ротора 32. В соответствии с фиг. 4, и принимая во внимание фиг. 1-21, совокупность гироглайдеров 12 подсоединена к фалу 14. Множество гироглайдеров 12 "нанизано" на фал 14. Каждый гироглайдер 12 парит наверху, прикрепленный к фалу 14, и запущен или "вытащен" наверх предыдущим запущенным гироглайдером 12. Обычно угол атаки лопасти 40 для каждой из лопастей 32 каждого ротора устанавливается низким или даже отрицательным для того, чтобы способствовать авторотации. После этого, когда ротор 22 начинает работать с достаточной скоростью, лопасти 32 стремятся выровняться в плоскости вращения 28, с каждой лопастью 32, работающей с выбранным углом атаки 40. Угол атаки 40 каждой лопасти ведет к управлению подъемной силой 46, прилагаемой потоком к этой лопасти. Увеличение угла атаки ротора 30 ведет к увеличению силы лобового сопротивления, так как площадь проецируемой ротором 22 области по направлению воздушного потока 20 увеличивается. Таким образом, для начала процесса авторотации гироглайдер 12 недалеко от земной поверхности наклоняется для того, чтобы обеспечить больший угол атаки 30, соответствующий всей площади лопастей ротора, спроецированной по направлению ветра. Практически каждый из совокупности гироглайдеров 12, подсоединенных к фалу, может быть запущен или поднят в небо, после чего запускается следующий. Если совокупность гироглайдеров 12 выводится один над другим, каждый будет тянуть последующий, расположенный рядом с ним, в силу этого расположенный выше гироглайдер 12 увеличивает натяжение в фале 14 между собой и нижерасположенным гироглайдером 12. Таким образом нижерасположенный гироглайдер будет также подниматься вверх. Некоторые трудности с ориентацией и тому подобными проблемами решаются путем установки специальных платформ, стартовых механизмов и так далее для осуществления надлежащей ориентации и минимизации любой внезапной нагрузки, добавляемой гироглайдеру 12. Тем не менее, при управлении углом атаки ротора 30 авторотация инициируется тогда, когда лопасть 32 поворачивается вокруг теоретической оси вращения 34, то есть точно горизонтально. Она будет эффективно работать подобно аналогичным системам, используемым на земле. Таким образом, где-то между горизонтальной осью вращения 34 и вертикальной осью вращения 34 находится подходящий стартовый угол ротора 22 для начала авторотации, поддерживаемой набегающим потоком 20 снизу. Как только угловая скорость ротора 22 увеличивается, угол атаки лопасти 40 уменьшается, угол атаки ротора 30 также уменьшается. В некоторых вариантах, таких как концепция "дельта-ротора", угол атаки ротора 30 и угол атаки лопасти 40 связаны. В других вариантах угол атаки ротора 30 управляется отдельно от управления углом атаки лопасти 40. Совокупность гироглайдеров 12, тянущих фал 14, будут прилагать совокупную силу, равную сумме всех подъемных сил 46, противодействующих всей совокупности сил лобового сопротивления 44, обеспечивая, таким образом, чистую результирующую подъемную силу 50 на фале 14, прилагаемую всеми гироглайдерами 12, находящимися в полете. В соответствии с фиг. 5 А-5 С и с учетом фиг. 1-21, гироглайдер 12 в таком варианте осуществления ориентируется посредством управления шагом гироглайдера 12. Например, как показано на фиг. 5 А,угол атаки ротора 30 может быть установлен в ноль или даже меньше по отношению к набегающему потоку. При такой установке гироглайдер 12 будет медленно опускаться. Только подъемная сила будет вызывать вращение несущего крыла или ротора 22 вследствие прохождения воздуха через лопасти 32 рото- 15019501 ра 22. На фиг. 5 А также показана втулка ротора 62, выполненная вращающейся относительно рамы 52 или фюзеляжа 52 гироглайдера 12. Шарнирные соединения 64 между каждой лопастью 32 и втулкой ротора 62 обеспечивают "маховое" движение каждой лопасти 32. Соответственно, каждая лопасть 32 приподнимается на необходимый уровень по отношению к втулке ротора 62. Малое зубчатое колесо 68 перемещается по направляющей 66 для изменения угла наклона гироглайдера 12. В данном варианте, наклон летательного аппарата управляет ориентацией втулки 62. Соответственно, угол атаки лопасти 40, если он взаимосвязан с углом атаки ротора 30, будет изменяться при наклоне гироглайдера 12. Например, в положении, приведенном на фиг. 5 В, направление входящего воздушного потока 20 проходит вверх через ротор 22. При достаточно высокой скорости центробежные силы воздействуют на лопасти 32 и принуждают их распрямляться в стороны от втулки 62. Как показано на фиг. 5 В, поток 20 проходит через ротор 22 и связанные с ним лопасти 32 в направлении вверх. Таким образом, набегающий поток 20 стремится авторотировать лопасти. Лопасти, в силу установленного угла атаки лопасти или шага лопасти 40, начинают развивать подъемную силу и поднимать раму или фюзеляж 52 вследствие прямого действия эффекта Бернулли. Малое зубчатое колесо 68 приводится в действие сервоприводом для перемещения по направляющей 66, таким образом осуществляется управление углом атаки ротора 30 гироглайдера 12. В соответствии с фиг. 5 С гироглайдер 12 в одном из вариантов системы 10 имеет экстремальное положение наклона ротора 22. Например, шарнирно подвешенные лопасти 32 поворачиваются на шарнирах 64 между лопастями 32 и втулкой 62. Соответственно, если центробежная сила относительно мала вследствие медленной скорости вращения, близкой к нулевой угловой скорости, то сила лобового сопротивления 44, действующая на лопасти 32, "загибает" или поднимает лопасти на шарнирах 64. При этом область вращения, очерчиваемая лопастями, становится конусом в отличие от обычной плоской области вращения 28. Таким образом, малое зубчатое колесо 68, перемещающееся по направляющей 66, наклоняет гироглайдер под очень крутым углом по отношению к входящему потоку 20, вызывая тем самым переход ротора 22 или лопастей 32 в режим "самовращения" или авторотации. Подъем лопастей 32 на шарнирах 64 по отношению к раме 52 гироглайдера 12 приводит к изменению шага 40 каждой из лопастей 32. Соответственно, при отсутствии положительного угла атаки, лопасти 32 не обеспечивают чистую подъемную силу 46, но в это же время просто авторотируют (подобно парусам лодки или крыльям мельницы) под воздействием напора, передаваемого набегающим потоком 20. Как только скорость вращения или угловая скорость ротора 22 возрастает, скорость лопасти 32 увеличивается и происходит переход из положения на фиг. 5 С в положение на фиг. 5 В. Центробежные силы, воздействующие на лопасти 32, "отгибают" их от втулки ротора 62 гироглайдера 12. В представленном варианте на фиг. 5, руль 54 используется для ориентации рамы 52 и, соответственно, ротора. В соответствии с фиг. 6 и с учетом фиг. 1-21, предлагается другой вариант системы 10 в соответствии с настоящим изобретением, использующий регуляторы шага 70, перемещающиеся по направляющим 66. Направляющие 66 выполнены либо в виде зубчатой направляющей, либо гладкими. В любом случае,ролики или малые зубчатые колеса 68, установленные внутри регуляторов 70, осуществляют перемещение регуляторов 70 вперед и назад по направляющим 66 рамы 52. В соответствии с вариантом, представленном на фиг. 5 А-5 С, исключительно руль 54 осуществлял управление наклоном гироглайдера 12 по отношению к фалу 14. В отличие от этого варианта, в варианте на фиг. 6 фал 14 снабжен дополнительным регулятором 72 для управления креном гироглайдера, при этом регулятор 70 остается регулятором шага. Регулятор крена 72 перемещается по направляющей 76,расположенной между контроллерами шага 70. Боковые части рамы выполнены в виде секторов с углом 71 между передней и задней частями рамы 52, угол определяет длину или сектор направляющей 66, используемой при управлении шагом. Таким же образом, угол 74 между правой и левой частями рамы 52 определяет сектор перемещения регулятора крена 72 по направляющей 76. В представленном варианте угол шага лопасти 40 или угол атаки лопасти 40 устанавливается независимо от угла атаки ротора 30 гироглайдера 12. В данном варианте угол атаки лопасти 40 устанавливается для каждой лопасти 32 в целях гарантированной авторотации ротора 22. Затем угол атаки лопасти 40 увеличивается до чистого положительного угла по отношению к набегающему потоку 20, действующему на переднюю кромку 77 вращающейся лопасти 32 в момент, когда лопасть 32 продвигается вперед в направлении, совпадающем с направлением полета гироглайдера 12. Когда гироглайдер 12 находится в режиме полета на фале 14, продвигающаяся вперед лопасть 32 имеет переднюю кромку 77, двигающуюся через набегающий воздушный поток. В то же время другая лопасть 32 является лопастью 32, отходящей назад и подвергающейся воздействию другого относительного воздушного потока в силу того, что чистый относительный поток лопасти 32 является результирующей скорости гироглайдера 12 по отношению к набегающему потоку 20 и относительной скорости продвигающейся вперед лопасти 32 по отношению к раме 52. Аналогично, отходящая назад лопасть 32 идет в обратном направлении 38, указанном на фиг. 2. Таким образом, скорость гироглайдера 12 поло- 16019501 жительна по отношению к потоку 20, в то время как скорость отходящей лопасти отрицательна по отношению к гироглайдеру. В приведенном варианте руль направления 54 и руль высоты 56 используются для изменения направления или высоты гироглайдера 12. Тем не менее, регулятор крена 72 используется для управления боковым креном летательного аппарата и связанного с ним ротора 22. В то же время регуляторы шага 70 перемещаются по направляющим 66 с целью установления определенного угла атаки ротора 30 летательного аппарата. Как уже говорилось выше, вариант, приведенный на фиг. 6, содержит регулятор, установленный либо в роторе, либо прикрепленный к втулке ротора 62 для индивидуального изменения угла атаки лопасти 40 каждой отдельной лопасти 32. Втулка ротора 62 установлена на опорном устройстве 60. В определенных вариантах опора 60 может быть снабжена сферическими подшипниками, втулками, вкладышами, или иными аналогичными элементами внутри основного узла подшипников втулки 62. Таким образом, в определенных вариантах втулка ротора 62 может быть вынесена на определенное расстояние от рамы 52 гироглайдера 12 и предоставлять ротору 22 возможность самостоятельно установить угол крена. Например, в силу того, что передняя кромка 77 стремится работать с более высокой относительной скоростью по отношению к набегающему потоку 20, она пытается подниматься, или взлетать вверх, значительно быстрее. Относительная скорость потока по отношению к движению вперед или двигающейся вперед лопасти 32 является суммой скорости гироглайдера 12 по отношению к потоку 20 и относительной скорости лопасти 32 по отношению к раме 52. Таким образом, скорость движения гироглайдера 12 вперед суммируется со скоростью движения вперед вращающейся и движущейся вперед лопасти 32. В отличие от этого, возвращающаяся лопасть 32 имеет чистую скорость по отношению к потоку 20,представляющую собой сумму положительной скорости движения вперед рамы 52 и отрицательной линейной скорости (угловая скорость, умноженная на радиус), возникающей вследствие возврата лопасти. На практике, относительная скорость возвращающейся лопасти по отношению к гироглайдеру 12 является скоростью в обратном направлении. Таким образом, она вычитается из скорости движения вперед рамы 52. Поэтому, угловая скорость любой точки на каждой лопасти 32 прибавляется к (для случая лопасти, движущейся вперед) и вычитается из (для случая лопасти, движущейся назад) скорости движения вперед рамы 52 гироглайдера 12. Таким образом, заходящая вперед лопасть 32 будет стремиться приподняться выше, при этом возвращающаяся лопасть будет стремиться опуститься ниже. Этим объясняется стремление ротора 22 занять определенное положение по отношению к раме 52, при котором идущая вперед лопасть поднимается вверх на высокий угол, а уходящая назад лопасть опускается на маленький угол по отношению к опоре 60. Монтажная площадка 79 сверху опоры 60 обеспечивает размещение и монтаж различной контрольно-измерительной и управляющей аппаратуры, коммуникационного оборудования и так далее. Например, устройства управления шагом лопасти размещены на монтажной площадке 79. В других вариантах,такие устройства управления шагом лопасти устанавливаются непосредственно на втулке 62 и вращаются вместе с ротором 22 и лопастями 32. В соответствии с фиг. 7 в одном из вариантов исполнения гироглайдера 12 направляющая 66 имеет переднюю часть 66 а и заднюю часть 66b. Между передней 66 а и задней 66b частями направляющая 66 имеет участок понижения или участок, имеющий намного меньший радиус. Таким образом, рама 52 гироглайдера 12 имеет возможность занять предпочтительное положение, наиболее благоприятное для частного случая ориентации с учетом ограничивающего воздействия фала 14. Как и в варианте на фиг. 6,вариант на фиг. 7 имеет переднюю 77 и заднюю 78 кромки для каждой из лопастей 32. Передняя кромка 77 выполнена наплывом или отвесным откосом, а задняя кромка, напротив, тонкая и нисходящая в линию. Такое исполнение продиктовано требованиями аэродинамики авиационного крыла, конструкция которого должна обеспечивать подъемную силу и минимизировать лобовое сопротивление. Аналогично варианту на фиг. 6, регуляторы 70 и 72 имеют соответствующие механизмы или зубчатые колесики 68 для перемещения по направляющим 66. Тем не менее, в данном варианте, предпочтительная "впадина" на направляющей 66 стремиться оставить летательный аппарат в предпочтительном положении и поддерживать такое положение в течение длительного периода. Выход из предпочтительной позиции осуществляется работой регуляторов 70 и 72, наклоняющих раму 52 и, соответственно, меняющих шаг ротора 22 на различные углы по отношению к потоку 20. В соответствии с фиг. 8 в другом варианте исполнения применяется косой тип шарнирного ротора 22, имеющего шарниры 64 между втулкой 62 и лопастями 32. Оси вращения шарниров 64 выполнены под углом к радиусу, проходящему через центр втулки 62, а угол атаки ротора 30 связан с углом атаки лопасти 40. Ротор 62 гироглайдера обеспечен подшипником для снижения трения между ротором опорой 60. Подшипниковый узел имеет внутреннее кольцо 82, неподвижно закрепленное относительно вращения или отсутствия такового опоры 60 (см. детализацию подшипников на фиг. 11-14). Внутреннее кольцо 82 не вращается относительно опоры 60. В подшипнике могут быть использованы различные элементы качения, как упорные ролики, так и шарики или подшипники Тимкен и так далее, которые работают между внутренним кольцом 82 и внешним кольцом 86, вмещающим их. В общем подшипник работает вращением внешнего кольца 86 относительно внутреннего кольца 82,в то же время ролики 84 перекатываются между кольцами. В альтернативных вариантах внутреннее кольцо 82 вращается при неподвижно закрепленном внешнем кольце 86, ролики 84 катятся между кольцами, снижая трение. В данном варианте в случае, когда ротор 22 работает относительно опоры 60, закрепленной на раме 52, внешнее кольцо 86 двигается относительно рамы 52, а внутреннее кольцо 82 остается неподвижным и закрепленным на опоре 60. В соответствии с другим вариантом, в качестве подшипника используется шаровая опора, благодаря чему втулка ротора 62 может поворачиваться для достижения оптимального угла крена ротора при подъеме идущей вперед лопасти 32 и опускании лопасти 32, заходящей назад. В соответствии с фиг. 8, направление 81 вращения ротора 22 представляет собой вращение отдельных лопастей 32 в направлении вращения 81. В положении взлета и при маленькой скорости лопасти 32 подняты вверх по направлению от земли на шарнирах 64. В соответствии с вариантами на фиг. 7-9, втулка 62 имеет шаровую опору 88 на основной опоре 60, шаровая опора 88 установлена в подшипнике 80. Шаровая опора 88 выполнена в виде сферического шарикоподшипника или сферического шарнира, вокруг которого поворачивается, но не вращается, подшипник 80. В то же время при инициировании угла атаки ротора 30, сравнительно слабое вращение ротора 22 приводит к возникновению сил лобового сопротивления 44, действующих на лопасти 32 и поднимающих их вверх. Таким образом, шарнир 64 позволяет лопасти 32 авторотировать. Однако при повороте лопасти 32 на шарнире 64 начинают совместно работать и угол атаки лопасти, и угол конусности. Например, при подъеме конца любой лопасти 32 относительно втулки 62, лопасти 32, вращаясь,описывают скорее конусообразную кривую, нежели чем плоский круг. Более того, когда лопасть 32 поворачивается на шарнире 64, угол, появляющийся между радиусом и осью вращения одного из шарниров 64, приводит к изменению угла атаки 40 каждой лопасти 32. Любое стремление лопасти 32 приподняться за счет сил сопротивления 44 потока 20 ведет к понижению угла атаки лопасти 40. Поэтому увеличение чистой энергии, получаемой от потока 20, приводит к вращению или авторотации (иногда название "самовращение") лопастей 32 и ротора 22. В варианте на фиг. 8 привод 90 имеет шток 92 в кожухе 94, закрепленный непосредственно на раме 52 гироглайдера 12. В данном случае рама 52 является простой трубой, закрепленной на фале 14. Привод 90, путем перемещения штока 92, поворачивает хвостовую балку 58, закрепленную на внутреннем кольце 82 подшипника 80. Соответственно, внутреннее кольцо 82 поворачивается относительно шаровой опоры 88, шаг 30 ротора 22 изменяется. Угол атаки ротора 30 изменяется поворотом шаровой опоры 80 и втулки 62. Когда втулка 62 поворачивается на шаровой опоре 88, или когда рама 52 поворачивается в соответствии с тем, как показано на фиг. 5-7, или изменяется угол атаки ротора 30, сопротивление потока относительно нижней стороны каждой лопасти 32 увеличивается. В то же время, вертикальный руль 54 также соединен с рамой. Руль 54 управляет ориентацией гироглайдера 12. Обычно лопасть 32 имеет лонжерон 96, установленный по всей длине лопасти 32 (виден на профиле поперечного сечения 95 лопасти 32). Лонжерон 96 обеспечивает жесткость при действии в лопасти 32 изгибающих сил. В некоторых вариантах, профиль лопасти 95 сплошной. Однако, у большинства летательных аппаратов лопасть 32 обязательно пустотелая для минимизации веса. Лонжерон 96 разделяет хорду лопасти 32 на две части. Хордой лопасти называется геометрическая линия, проходящая от передней кромки 77 до задней кромки 78. Жесткость лопасти 32 вдоль хорды обычно обеспечивается встроенными в обшивку нервюрами и тому подобными элементами. Действие изгибающих сил обычно требует наличия лонжерона 96 для противодействия изгибающим нагрузкам, возникающим в результате приложения подъемной силы 46 к верхней поверхности лопасти 32. На фиг. 9 представлен другой вариант настоящего изобретения, в соответствии с которым совокупность гироглайдеров "нанизана" на фал 14 в ряд вдоль всей его длины. Соседние роторы 22 на фале 14 отделены друг от друга на определенное расстояние. Рама 52 выполнена в виде простой трубы, в которую проведен фал 14, рама имеет фиксирующее устройство для закрепления гироглайдера на фале 14. На фиг. 10 рама 52 гироглайдера 12 снабжена платформой 100. Платформа 100 в предыдущих вариантах имеет небольшой размер и еле видна сверху рамы 52. Небольшая часть платформы, установленной на раме 52, может быть рассмотрена ниже втулки ротора 62. Вариант, приведенный на фиг. 10, содержит удлиненную платформу 100, имеющую передний торец 103 и задний торец 101. Передняя часть платформы 100 недалеко от торца 103 подвешена на шарнире 102 так, что угол поворота 30 или угол атаки ротора 30 изменяется, при этом отсутствует необходимость в изменении угла или положения рамы 52. Силовой элемент 104 в форме пружины или подобных устройств придает платформе 100 определенное положение относительно рамы 52. Упор на раме 52 ограничивает платформу 100 от поворота ниже определенного горизонтального уровня. Преодолевая силу сопротивления или упругости силовых элементов или пружин 104, задний торец 101 платформы 100 поднимается вверх от рамы 52 и изменяет угол атаки ротора 30, определяемый осью вращения 34 ротора 22. Платформа 100 удлинена от оси вращения шарнира 102, соответственно, ось вращения 34 смещена на расстояние 106. Это расстояние или длина (L) 106 представляет собой смещение 106 между точкой вращения шарнира 102, через которую в обычных вариантах должна была проходить ось вращения ротора 34, и фактической осью вращения ротора 22. Изменение положения платформы 100 ее поворотом в пределах угла поворота 105 смещает плоскость вращения 28 втулки 62 и ротора 22. Расстояние 108, на которое смещена плоскость вращения 28 относительно оси шарнира 102 является нейтральным, или горизонтальным положением платформы 100, то есть высотой вертикального смещения 108 (D). Соотношение подъемной силы к силе сопротивления ротора 22 отражено в соотношении расстояния (L) 106 и высоты (D) 108, в данном варианте эти соотношения равны. В соответствии с фиг. 11-14 могут быть осуществлены различные варианты исполнения втулки 62 и шарниров 64, равно как реализованы и иные различные приспособления. Например, в варианте на фиг. 11 ротор 22 вращается в направлении 81, при этом передняя кромка 77 фактически поворачивается по меньшему радиусу, чем задняя кромка 78. Это связано со скосом оси вращения шарнира 64, в отличие от случая, когда ось шарнира перпендикулярна радиусу 111, проходящему через центр втулки 62 вдоль лопасти 32. При этом хорда 109 каждой лопасти 32 лежит перпендикулярно радиусу 111. В силу того, что ось вращения шарнира 64 не параллельна хорде, радиус от оси шарнира 64 до хорды 109 короче вдоль передней кромки 77 и длиннее вдоль задней. Очевидно, что хорда 109 изменяет свой угол атаки 40 при повороте лопасти 32 на шарнире 64. В любом случае, когда лопасть 32 поворачивается вверх на шарнире 64 относительно втулки 62, передняя кромка 77 работает по меньшему радиусу или расстоянию между шарниром 64 и хордой 109, а задняя кромка 78 проходит большее расстояние. Подобное соединение лопастей 32 с втулкой 62 приводит к значительному увеличению отрицательного угла атаки. Малый угол атаки 40 для каждой лопасти 32 появится, когда каждая лопасть 32 будет вращаться ровно в плоскости, проходящей через втулку 62. Таким образом, угол атаки лопасти 40 связан с поворотом каждой лопасти 32 на шарнире 64 относительно втулки 62. На фиг. 12, в соответствии с еще одним вариантом исполнения изобретения, представлен генератор 110, который обеспечивает электрическую энергию, необходимую для питания контрольноизмерительного и управляющего оборудования гироглайдера 12 и его ротора 22. Например, работа автопилота, управляющего снижением или подъемом гироглайдера 12, обеспечивается бортовым электропитанием, получаемым от генератора 110. Генератор 110 встроен посредством размещения обмотки 112,зафиксированной на одном из колец подшипника 82 или 86, и магнита, установленного на одном из противоположных установке обмотки колец 86 или 82. На практике, магнит 114 является электромагнитом с обмоткой или обычным магнитом. Обмотка 112 проходит через магнитное поле, создаваемое магнитом 114, в результате чего в обмотке 112 возникает электрический ток. Таким образом, генератор 110 обеспечивает зарядку бортовой аккумуляторной батареи или аналогичных устройств, обеспечивающих питание различной контрольно-измерительной аппаратуры, оборудования управления гироглайдером 12 и тому подобных устройств. В соответствии с еще одним вариантом изобретения предусматривается резервный источник мощности, обеспечивающий взлет и посадку гироглайдера в неблагоприятных условиях. Соответственно,реактивные двигатели 116 размещаются на лопастях 32 недалеко от конца лопасти. Реактивный двигатель 116 приводится в действие с помощью дистанционного управления с наземной станции в случае,если необходимо раскрутить ротор 22 гироглайдера 12, или для временного поддержания отдельно взятого гироглайдера 12 с ротором 22 в воздухе для плавного снижения в условиях безветрия, и тому подобное. В соответствии с фиг. 13 и с использованием фиг. 1-21, предлагается другой вариант ротора 22 с шарнирным соединением 64, на котором подвешены лопасти 32, направленные не радиально, а под углом к радиусу втулки 62. В варианте на фиг. 13 лопасти 32 подвешены на шарнирах 64, рукава втулки с посадочными местами для шарниров расположены перпендикулярно радиусу 111. Лопасть 32 подвергается изгибающему усилию вследствие действия центробежных сил, пытающихся "распрямить" лопасть 32 вдоль радиуса 111. Шарнир 64 и полная длина лопасти 32 должны выдерживать нагрузки от таких сил, действующих на распрямление лопасти 32 в направлении радиуса 111. В данном случае передняя кромка 77 двигается с меньшим значением радиуса 111 от центра втулки 62 по сравнению с задней кромкой 78. Соответственно, такая конфигурация аналогична представленной на фиг. 11-12, в случае которой также возникает угол конусности или стремление лопасти 32 приподняться и описывать конус, нежели чем плоский круг. Посредством применения таких вариантов шарнирных подвесов 64 и лопастей 32 достигается изменение угла атаки лопасти 40. В данном случае, рукав 98 или выгон 98 втулки ротора, к которому непосредственно крепится каждая лопасть 32 посредством шарнира 64, конструктивно является жестко фиксированной частью втулки 62. В соответствии с фиг. 14 и вариантами осуществления изобретения на фиг. 5-13, рукав втулки 98 закреплен на втулке 62 и вращается вместе с ней, а шарнирное соединение 64 обеспечивает подвес лопа- 19019501 сти 32 к рукаву втулки 98. Шарнирный палец 118 проходит через рукав 98 и комель 120 лопасти 32. В данном варианте, палец 118 имеет ось вращения, перпендикулярную радиусу 111, проходящему через центр вращения или ось вращения 34 втулки 62. Аналогично, ротор 22 выполнен поворачивающимся относительно опоры 60 и закрепленным на шаровой опоре 88, в качестве которой использованы сферическая втулка или шаровой шарнир. Соответственно, угол атаки ротора 30 управляется независимо от угла атаки 40 лопастей 32. В альтернативном варианте шарниры 64, в частности шарнирные пальцы 118, установлены под углом относительно радиуса 111 из центра втулки 62. Таким образом обеспечивается взаимосвязь между конусностью или подъемом каждой лопасти 32 и относительным углом атаки 40 такой лопасти 32. Аналогично, в данном случае шарниры 118 установлены перпендикулярно относительно радиуса 111 втулки 62, однако лопасти 32 установлены под углом так, как показано на фиг. 13. В соответствии с фиг. 15 А-15 В предлагается вариант гироглайдера 12 с рамой 52, закрепленной на фалу 14. Однако малые зубчатые колеса с сервоприводом 68 перемещаются по направляющим 66 (одна направляющая 66, множество направляющих 66, и так далее) для изменения наклона рамы 52 относительно фала 14, удерживающего гироглайдер 12 с наземной станции или просто с земной поверхности. В одном из вариантов изобретения поворотные устройства 124, например, пружины, натяжные ленты и так далее, предназначены для поднятия лопастей 32 вверх в положение, показанное на фиг. 15 В. В вариантах с использованием шарниров 64, представленных на фиг. 11-14, угол атаки лопасти 40 отрицательный, когда лопасть 32 находится в сравнительно высоком положении на фиг. 15 В. В то же время, поперечное сечение 95 лопасти 32 на фиг. 15 В перемещается с отрицательным углом атаки 40 по сравнению с конфигурацией на фиг. 15 А. В случае конфигурации на фиг. 15 А, в ответ на действие центробежной силы лопасти 32 понижаются и работают в плоскости около оси вращения 34 втулки 62. В этом случае фал 14 показан проходящим через втулку 62. На практике фал 14 оканчивается на раме 52,или на втулке 62 единственного гироглайдера 12 на фале 14. Центробежная сила преодолевает сопротивление поворотных устройств 124, установленных между втулкой 62 и лопастью 32 и удерживаемых крепежными устройствами 126 или любыми аналогичными крепежными приспособлениями. Центробежная сила преодолевает сопротивление поворотных устройств 124, что приводит к работе лопастей 32 в плоской конфигурации. В такой конфигурации, представленной на фиг. 15 А, угол атаки лопасти 40 имеет наивысшее положительное значение. В ситуации, когда лопасти только начинают раскручиваться из положения покоя, то есть когда скорость гироглайдера 12 или скорость вращения ротора низкие, то каждая из лопастей 32 поднимается поворотными устройствами 124 вверх. В случае, когда поток 20 недостаточен для увеличения угла конусности или конусности ротора 22, то есть, когда скорость недостаточна для возникновения центробежной силы, требующейся для осуществления лопастями 32 маховых движений, поворотные устройства 124 осуществляют это автоматически. Поворотные устройства 124 являются упругими силовыми элементами, управляемыми центробежной силой, и, соответственно, устройствами пассивного управления шагом лопасти. В соответствии с другим вариантом настоящего изобретения поворотные устройства 124 выполняются в виде сервоприводов и осуществляют активное управление шагом лопасти. Угол атаки (УА) лопастей может регулироваться активно так, что будет достигнуто состояние стартового вращения (отрицательный УА) или состояние авторотации с небольшим положительным УА. В соответствии с фиг. 16-17 в одном из вариантов изобретения предлагается сооружение 130, имеющее поворотный круг 132. Поворотный круг 132 установлен на подшипниках, снижающих трение,вследствие чего руль 54 гироглайдера 12 создает достаточное вращательное усилие для разворота гироглайдера 12 по ветру 20. Независимо от того, на какой поверхности находится поворотный стол 132, шарнир 136 приподнят над уровнем поворотного круга 132 при помощи опорных стоек. На шарнире 136 подвешена посадочная платформа 140, пассивное или активное управление платформой позволяет изменять ее положение (угол) по отношению к горизонту. Например, на фиг. 16, гироглайдер 12 находится в состоянии покоя на посадочной платформе 140 на шасси (стойках шасси) 138, прикрепленных к раме 52. Шасси 138 является частью рамы 52 или может быть выдвигаемым, постоянным (неубирающимся), убирающимся, и так далее. При взлете или посадке платформа 140 поворачивается для обеспечения необходимого угла атаки ротора 30 для инициирования или завершения работы ротора. При использовании сооружения 130 ротор 22 размещен выше земной поверхности. Гироглайдер 12 взлетает за счет поворота платформы 140, обеспечивающего наивысший угол атаки ротора 30. Аналогичным образом происходит процесс посадки устройства. Например фал 114 подтягивает гироглайдер 12 вниз, в это время система управления анализирует и контролирует вышеуказанное снижение гироглайдера 12 изменением угла атаки ротора 30, угла атаки лопасти 40, или обоих одновременно. При снижении летательного аппарата в фале 14 возникает падение натяжения. Тяговой лебедке 16 требуется значительно меньше энергии для подтягивания гироглайдера 12 в отличие от ситуации, когда значительная энергия генерируется при наборе высоты гироглайдером 12 и вытягивании фала 14, в результате чего в фале 14 возникает избыточное натяжение. Как только гироглайдер 12 достигает платформы 140, стойка шасси 138 касается платформы 140 и ориентирует платформу относительно гироглайдера 12, или ориентирует (разворачивает) гироглайдер 12 относительно положения платформы 140. Дополнительно, платформа 140 выравнивается для хранения,обслуживания и тому подобное. Фиг. 24 иллюстрирует посадочное/стартовое устройство 184, позволяющее гироглайдеру взлетать или приземляться в единую точку на земле, башне, вышке, буе в море, судне и тому подобное. Наличие такого устройства 184 избавляет от необходимости строительства взлетно-посадочной полосы для взлета и приземления. Возможно приземление на данное устройство при полном отсутствии ветра посредством подтягивания фала 14 со скоростью, достаточной для развития лопастями ротора тяги, достаточная скорость составляет примерно 10 узлов. Взлеты могут осуществляться при скорости ветра менее 10 узлов в силу высокой тяговой способности гироглайдера и минимального веса фала при взлете. Посадочно-стартовое устройство 184 снабжено ограничительной щелью 186, ограничивающей перемещение фала 14 и двух управляющих тросиков 170, фал заведен на направляющий блок 188, размещенный по самому центру полого внутри поворотного круга 200, вращающегося на подшипниках. В соответствии с настоящим изобретением, термин "уздечка" используется для обозначения тросиков или канатов, служащих цели подвески фала. Два управляющих тросика 170 образуют узел уздечки, далее переходящий в фал 14. Ограничительная щель 186 снабжена двумя поддерживающими рычагами 202. Направляющий блок 188 позволяет гироглайдеру осуществлять полет в любом квадранте без проблем,связанных со спутыванием фала или применением сложных вращающихся устройств. Направляющий блок 188 размещен по центру непосредственно под полым поворотным кругом 200, и позволяет вытягивать фал 14 стационарной тяговой лебедкой 16. Преобразователь 18 и другие устройства, имеющие отношение к операциям с фалом, не требуют каких-либо перемещений и могут быть также размещены стационарно, ниже или в любом другом направлении или на любом расстоянии от посадочного устройства 184. В соответствии с вариантом настоящего изобретения, совокупность гироглайдеров, каждый с посадочно-стартовым устройством, создают общую генерирующую сеть с фалами, выпущенными на определенное расстояние над землей с использованием системы роликов или натяжных блоков (в трубах в целях безопасности), и передают фаловое натяжение на общую генерирующую станцию с единым накопительным фаловым устройством. Таким образом посадочно-стартовое устройство, приведенное на фиг. 24 выполнено для хранения и удержания гироглайдера без необходимости в тяжелых и сложных посадочных устройствах. Устройство поворачивается вверх и вниз для изменения угла атаки ротора до того, как гироглайдер покинет безопасную стоянку. Это дает возможность гироглайдеру подготовиться для запуска и накопить достаточную для взлета мощность или, наоборот, сбросить обороты и остановить ротор после приземления. Способность гироглайдера летать с управлением креном с одновременным ограничением с помощью ограничительной щели 186 дает гироглайдеру возможность преодолевать шквалы и порывы ветра, а также изменения направления ветра в любых квадрантах, включая изменение направления на противоположное. Посредством поворотного крута 200 или захвата на устройстве 184 возможно задавать курс и обеспечивать то, что устройство 184 всегда в створе с изменением скорости и направления ветра, и готово принять гироглайдер для посадки в любой момент. Фал постоянно проходит через ограничительную щель 186, поэтому натяжение фала всегда обеспечивает то, что ограничительная щель 186 и посадочное устройство 184 установлены по ветру. На фиг. 25 приведена система управления креном гироглайдера с двумя тросиками управления в соответствии с одним из вариантов настоящего изобретения. Точка крепления, в которой сходятся тросики управления 175, в ходе полета смещается влево или вправо посредством, по меньшей мере, одного устройства управления креном 178, выбранного из группы, содержащей зубчатую направляющую, гидроцилиндр, тросик и металл с памятью формы, установленного в нижней части рамы 52 в совокупности с сервоприводом 180. Это заставляет ротор 22 сместиться с линии и приводит к крену или качанию влево или вправо. Если точка крепления смещается влево, происходит крен влево, и наоборот. Перемещением точки крепления вправо или влево изменяется центр давления (ЦД), ротор 22 начинает наклоняться вправо или влево от очень незначительного входного управляющего усилия. Блок управления 172 втягивает и вытягивает тросики 175 в целях управления шагом. В соответствии с фиг. 18 в одном из вариантов изобретения, роторы 22 снимаются со своих рам 52 на наземной станции. Например, лебедка 16 фактически сматывает фал, помещаемый в контейнер накопительного устройства 142 в соответствии с фиг. 22 А и 22 В. Складирующее устройство 144 обеспечивает выборочное снятие каждой рамы 52 с соответствующего ей ротора. Роторы 22 затем укладываются в стопку, фал 14 пропускается через центральное отверстие 122 втулки 62. Таким образом роторы 22 складируются друг к другу с помещением между ними прокладочных материалов и тому подобных приспособлений. Гироглайдер 12 перегруппировывается запуском гироглайдера 12 вверх, прикрепления рамы относительно фала 14, и дальнейшего полета каждой присоединенной рамы 52 со своим собственным рото- 21019501 ром 22 вверх, фал 14 отматывается до очередной точки фиксации следующего гироглайдера 12. Таким образом, совокупность гироглайдеров производит чистую подъемную силу для обеспечения чистого прироста натяжения в фале. В соответствии с фиг. 19 рама 52 снабжена захватным устройством, например, зажимом или разъемом 150, выполненным для присоединения рамы 52 к втулке 62 ротора 22. Зажим или разъем 150 присоединяются по направлению 152 для обеспечения крепления рамы 52 к втулке 62. В то же время, рама 52 жестко фиксируется на фале 14 на определенной его длине, для обеспечения такого расположения ротора, чтобы он обеспечивал соответствующее натяжение фала 14. Отдельный вариант иллюстрирует сдвоенные зубчатые колесики 68 с сервоприводом для перемещения по направляющим 66. На практике, гироглайдер 12 используется в качестве платформы для размещения различной аппаратуры и оборудования. Например, метеорологические данные собираются на сравнительно больших высотах в десятки тысяч футов от поверхности земли. Таким образом, достаточно надежные и долгосрочные данные могут быть получены при установке на гироглайдер 12 измерительного оборудования и аппаратуры. На фиг. 20, в соответствии с одним из вариантов настоящего устройства и способа его применения,система 154 обеспечивает способ управления натяжением фала. Воздушные потоки в средних слоях атмосферы имеют более ровный и постоянный характер, нежели чем у земной поверхности. Соответственно, контроллер 156 определяет, находится ли натяжение в рамках установленного диапазона значений,разрешенных для рабочего хода (РХ). Подобным образом, контроллер 156 управляет натяжением путем проверки того, достаточно ли натяжение для обратного хода (ОХ). Контроллер 156 получает входной сигнал 157 от бортового измерителя натяжения 158. Измеритель натяжения 158 измеряет натяжение, существующее в фале 14, либо добавленное к нему 14. В то же время, входной сигнал 159 от датчика скорости ветра 160 также поступает на вход контроллера 156 для анализа скорости ветра, которому подвергается отдельный гироглайдер 12. Датчик скорости ветра 160 обеспечивает данные 159 для контроллера 156, содержащие информацию о скорости ветра. Соответственно, контроллер 156 определяет, посредством соответствующего алгоритма, достаточно или нет натяжение, данные о котором получены в виде входного сигнала 157 от датчика натяжения 158, и соответствует ли оно конфигурации гироглайдера 12, ротора 22, и лопастей 32 в особенности. Контроллер 156 выдает данные о состоянии 162 фала 14. Например, если получен сигнал состояния 162 а, говорящий о том, что натяжение в пределах нормы, то контроллер 156 просто повторяет цикл контроля 164. В противном случае, если сигнал о состоянии натяжения сообщает о слишком слабом натяжении 162b, то контроллер 156 дает команду на уменьшение скорости разматывания (скорость, при которой генерируется энергия). Контроллер 156 управляет гироглайдером 12 таким образом, чтобы уменьшить скорость выхода фала на уровне наземной станции, для снижения усилия в фале в режиме рабочего хода (РХ). Подобным образом, если фал 14 и гироглайдер 12 находятся в режиме обратного хода (ОХ),сигнал состояния 162b вынуждает контроллер 156 увеличить скорость сматывания фала 14 лебедкой 16. Если натяжение выходит за границы операционного допустимого диапазона и имеет слишком маленькое значение, то имеет место состояние 162 с. Контроллер 156 увеличивает 163 с угол атаки ротора 30 или увеличивает 163 с шаг лопастей 40. Таким образом, угол атаки лопастей 40 или шаг лопастей 40 увеличивается для увеличения подъемной силы 46, что приводит к увеличению натяжения в фале 14. Если возникает состояние 162d вследствие слишком высокого уровня натяжения для наземного оборудования или летательного аппарата, или для самого фала 14, контроллер 156 уменьшает 163d угол атаки ротора (УА) 30, или уменьшает 163d шаг лопастей 40, то есть угол атаки лопастей 40. Если возникает состояние 162 е и натяжение в фале 14 существенно превышает допустимый уровень натяжения фала 14, контроллер 156 управляет гироглайдером 12 так, чтобы увеличить 163 е скорость разматывания лебедки 16, или уменьшить 163 е скорость сматывания лебедки 16 при обратном ходе. Таким образом, скорость разматывания, общий шаг лопастей 40 или и то, и другое одновременно управляются с целью уменьшения или регулирования иным образом натяжения в фале. В любом случае,при возникновении любого состояния 162, корректировочные действия 163 осуществляются незамедлительно с обратной связью до повторения цикла 164, контроллер 156 получает новые данные от датчиков 166, либо на вход контроллера поступают входящие установки 166 контроллера 156. Корректировочные команды 163 установлены для выполнения в определенных диапазонах. В альтернативном варианте, все управляющие корректировочные команды 163 осуществляются на основе непрерывных алгоритмов, которые обрабатывают различные управляющие параметры гироглайдера 12 для поддержания натяжения в фале 14 в пределах установленного диапазона. В соответствии с рисунками 21 А-21D, альтернативный вариант гироглайдера 12 содержит уздечку 170, замещающую собой определенные части жесткой рамы 52. Например, на фиг. 21 приведена простейшая конструкция рамы 52. В то же время, уздечка 170 замещает направляющие 66 и 76 в рамах 62,описанных в настоящем документе выше. Контроллер 172 опускает переднюю консоль (шаговый рычаг) 174 вниз, или освобождает его для предоставления ему возможности пойти вверх. Рычаг 174 является шаговым рычагом (и одновременно передней консолью рамы гироглайдера), поэтому "задирание" свободного шагового рычага 174 вверх обеспечивает увеличение шага гироглайдера, в то время как опускание рычага 174 уменьшает шаг гироглайдера 12. Таким образом, угол атаки ротора 30 изменяется путем освобождения передней консоли 174 с предоставлением ей степени свободы для движения вверх или ее опусканием вниз. Тросики 175 соединены с шаговым рычагом и задней частью рамы 52 и управляются контроллером 172 путем натягивания или отпускания. Таким образом, тросики 175 могут рассматриваться, как единая линия управления контроллера 172, распределенная между носовой частью (шаговый рычаг) 174 гироглайдера 12 и его хвостовой частью, недалеко от хвостовой балки 58 в задней части гироглайдера 12. Аналогичным образом осуществляется управление креном. Для этого используются плечи 176 рычага управления креном. Управление креном производится путем отпускания или подтягивания тросиков крена 177 контроллером 172. Тросики крена соединены с плечами 176 рычага управления креном, плечи расположены по обеим сторонам рамы 52. В общем, уздечка 170 обеспечивает управление креном и шагом рамы 52, и, таким образом, креном и шагом ротора 22, связанного с ней. Если скорость ветра растет, центр давления (ЦД) увеличивается в квадрате от скорости ветра, в то время как центр тяжести (ЦТ) остается неизменным. В определенный момент маятниковый эффект центра тяжести (ЦТ) подавляется значительно более сильными эффектами центра давления (ЦТ) и гироглайдер становится неустойчивым. Гироглайдер в соответствии с настоящим изобретением лишен этого недостатка благодаря двум вариантам осуществления настоящего изобретения, приведенным на фиг. 23. В одном из вариантов зубчатая направляющая 178 закреплена в нижней части рамы 52 с сервоприводом 180. Грузовой отсек, содержащий аккумуляторную батарею и другое тяжелое бортовое оборудование,присоединен к подвижной направляющей на хвостовой балке гироглайдера. При увеличении скорости ветра (или уменьшении) грузовой отсек перемещается по направляющей 178, изменяя таким образом центр тяжести и поддерживая маятниковый эффект в равновесии с ЦД. В случае обрыва фала, ЦТ смещается по направляющей 178 к передней кромке ЦД, предоставляя гироглайдеру возможность независимо опуститься на землю в непредвиденной ситуации. В качестве альтернативного варианта в хвостовой части устанавливается горизонтальный стабилизатор 182 для создания противодействующей силы, направленной вниз, которая увеличивается с увеличением скорости ветра в такой же пропорции, как увеличивается ЦД с увеличением скорости ветра. Действительный маятниковый эффект утерян, однако ситуация искусственно управляется автопилотом, регулирующим угол атаки ротора (УА) и/или угол атаки лопасти (УАЛ) и/или манипулирующим горизонтальными и вертикальными поверхностями хвостового оперения. На фиг. 26, в соответствии с настоящим изобретением, приведена схема работы маховика 206 и муфт 204 для выравнивания производимой энергии устранением пиковых скачков. Муфты 204 и маховик 206 выравнивают крутящий момент на входе преобразователя 18. Муфты 204 являются механическими или автоматически регулируемыми электромагнитными муфтами. Двигатель, используемый для работы обратного хода, представлен позицией 208. Фал 14 соединен с посадочным устройством, находящимся неподалеку в случае работы одного гироглайдера или в нескольких километрах в случае, если совокупность гироглайдеров подключена для обслуживания одного преобразователя 18. Маховик 206 сохраняет энергию во время рабочего хода гироглайдера для последующей передачи преобразователю 18 в ходе вытягивания фала 14. Преобразователь 18, обычно генератор, получает постоянный крутящий момент через маховик 206, управляемый муфтами 204. В соответствии с отличительной особенностью этого варианта, крутящий момент повышается или понижается применением зубчатых передач. В соответствии с еще одним отличительным признаком настоящего варианта, более одной лебедки 16 и более одного двигателя обратного хода 208 подключено к единственным маховику 206 и преобразователю 18. Эффект Бернулли действует в жидких средах. Тем не менее, является нетипичным использование этого эффекта для создания подъемной силы в жидких средах. Причина состоит в том, что жидкость,проходящая мимо свободного потока, для того, чтобы сжаться в уменьшенной области, должна быть вытеснена из другой жидкости. В то же время, эффект Бернулли в жидкостях часто рассматривается с точки зрения сужения пути потока, когда в качестве непосредственно примыкающего материала выступает твердая стенка, например, водопровода, нежели чем отдельный поток жидкости в свободном потоке, где движение жидкости должно быть связано с вытеснением соседней жидкости. В альтернативных вариантах устройство и способ в соответствии с настоящим изобретением работают в воде. Эффект Бернулли обычно основан на полете в газообразной среде. Тем не менее, другие текучие среды, такие как, например, жидкости, могут также быть использованы. Например, определенные течения, возникающие благодаря отливам и приливам, реки и Гольфстрим порождают в океане движение значительных объемов и масс жидкости. В таком варианте осуществления, устройство 10 может,но не требуется, работать в качестве авторотирующего устройства. Такое устройство закрепляется для вращения вокруг горизонтальной оси, параллельной потоку жидкости, то есть действует как "водяной ротор". В определенных вариантах, основанных на передаче воды, также как и в вариантах, основанных на переносе воздуха, баржа ставится на якорь в точке над потоком воды. Система генерации энергии с намоточным устройством устанавливается на такой барже или на участке земли на поверхности скопления водной массы. В одном из альтернативных вариантов, ротор или парус отпускаются на фале с натяжного блока,закрепленного на дне. Факторы лобового сопротивления учитываются для дифференциации лопастей,двигающихся с потоком и двигающихся против потока жидкости. Поток жидкости стремится вращать лопасти, вызывая ввинчивание лопастей вверх с вытягиванием фала вверх, или ввинчивается вниз с баржи или судна в альтернативном варианте. Полученная энергия передается любым подходящим способом. В одном из вариантов осуществляется трансформация энергии ротора в подходящую распределяемую и хранимую среду. В качестве альтернативы, трансформация энергии в гидравлическую мощность, сжатие газа, например воздуха или иных рабочих жидкостей, подача воды и тому подобное в результате преобразования энергии натяжения фала ротором. В определенных вариантах энергия производится в механической форме, нежели чем в форме электрической энергии, и используется непосредственно. Например, для сжатия газов, прокачки жидкостей и так далее, то есть используется для осуществления различных режимов транспортировки. В определенных вариантах фал 14 подсоединяется непосредственно к буксируемому судну или система устанавливается для производства энергии на плавсредствах, например, на лодках и океанских судах. Ротор может использоваться не столько для обеспечения энергией силовых установок судна, сколько для обеспечения электрической или механической энергией нужд управления судном. Даже с небольшой генерирующей мощностью, устройство 10 в соответствии с настоящим изобретением обеспечивает энергопитание бортовой аппаратуры и управляющего оборудования судна даже в то время, когда судно продолжает движение через океан. В определенных вариантах изобретения устройство 10 может служить в качестве высотной башни для размещения коммуникационного оборудования, ретрансляторов сотовой связи, радиолокационных систем, метеостанций, систем пожарообнаружения, приборов наземного обнаружения и тому подобное. Высота, стабильность работы и наличие легкодоступной энергии дает основания считать устройство 10 превосходной платформой для обеспечения энергией подобных систем. В определенных вариантах угол атаки лопасти 40 управляется "умным металлом", имеющим память. Соответственно, при температурных изменениях металл изменяет свою форму, вызывая изменение шага лопасти, в отношении которой деталь с памятью формы служит креплением или основанием. В то же время могут использоваться другие типы приводов, включая перечисленные в патенте Гроена(Groen), который включен в настоящую заявку посредством ссылки, приведенной выше, а также примененные в других летательных аппаратах, известных специалистам в этой области, для управления по мере необходимости углом атаки 40 ротора. В соответствии с настоящим изобретением гироглайдер эффективно применяет маневрирование при боковом ветре для генерации энергии. Маневрирование осуществляется поддержанием постоянного шага ротора и изменением угла крена. Угол крена определяется углом между вертикальной осью гироглайдера и вертикальной плоскостью к поверхности земли, включающей продольную ось гироглайдера. В результате маневрирования гироглайдера в боковом ветре возникает скорость бокового маневрирования. В зависимости от соотношения подъемной силы к силе лобового сопротивления ротора, возникающая в результате маневрирования скорость относительного потока на роторе значительно превышает скорость окружающего потока. На рисунках 27 А-27 Е представлены графики параметров полета в ходе маневрирования при боковом ветре. Из графиков очевидно, что при одинаковых условиях встречного потока использование бокового маневрирования более чем удваивает относительный поток (4 ччч динамическое давление) по сравнению с полетом по прямой. Как видно из рисунка 27 В, угол крена изменяется в начале рабочего хода для того, чтобы ограничить натяжение каната в течение периода высокого относительного окружающего потока до того, как полностью установится скорость разматывания лебедки (что уменьшает скорость относительного потока). Это необходимо для поддержания натяжения каната с коэффициентом безопасности 2,0 в соответствии с расчетными критериями. Номинальные профили параметров полета в ходе бокового маневрирования приведены на фиг. 27 В и 27 С. Графики траекторий гироглайдера в ходе маневрирования при боковом ветре приведены на фиг. 27D и 27 Е. Разница в боковом отклонении в конце цикла объясняется асимметрией профиля угла крена, и должна "размываться" на последующих траекториях изменением асимметрии профиля. Боковое маневрирование гироглайдера в соответствии с настоящим изобретением помогает сгенерировать около 30% дополнительной энергии. Численные значения, приведнные для различных физических параметров, размеров или величин,являются приблизительными, и предусматривается, что значения могут быть выше или ниже численных значений, присвоенных параметрам, размерам или величинам в объме настоящего изобретения, за исключением случаев, когда положением заявки не утверждается иное. Настоящее изобретение может быть осуществлено в иных вариантах в пределах сущности и объма изобретения. Предложенные варианты осуществления настоящего изобретения никоим образом не ограничивают объем настоящего изобретения и их следует считать иллюстративным и вспомогательным материалом. Объем настоящего изобретения, таким образом, определяется прилагаемой формулой, нежели чем вышеизложенным описанием. Любые изменения по смыслу и объему, равнозначные формуле, сле- 24019501 дует считать охваченными объемом настоящего изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для получения электроэнергии, содержащее по меньшей мере один гироглайдер, содержащий подвижно закрепленный на раме ротор с совокупностью лопастей и снабженный по меньшей мере одним устройством управления шагом, выбранным из группы, состоящей из вертикального руля, горизонтального руля или обоих вертикального и горизонтального рулей, указанный ротор выполнен с возможностью вращения вокруг оси вращения для обеспечения подъемной силы указанного гироглайдера; указанный ротор имеет шаг ротора, характеризующийся положением ротора по отношению к набегающему воздушному потоку, и шаг лопасти, определяемый соответственно для каждой из лопастей углом наклона лопасти по отношению к набегающему воздушному потоку; фал, имеющий первый конец и второй конец, первый конец расположен непосредственно на земле,второй конец вытягивается наверх, указанный фал выполнен для закрепления гироглайдера на указанном втором конце, указанный фал является по меньшей мере одним из компонентов или комбинации таковых, выбранного из группы, содержащей стальной трос, сплетенные из синтетических полимерных волокон канаты, канаты на основе сверхпрочных, сверхстойких термически и огнестойких волокон, канаты на основе углеродных нанотрубок; устройство управления натяжением, предназначенное для управления натяжением указанного фала,содержащее бортовой измеритель натяжения, предназначенный для измерения натяжения, существующего или дополнительно добавленного к фалу; датчик скорости ветра, обеспечивающий определение скорости воздушного потока, воздействующего на указанный гироглайдер; и контроллер, выполненный для получения данных от бортового измерителя натяжения и датчика скорости ветра и циклического контроля натяжения указанного фала; указанный контроллер выполнен для проверки соответствия данных, полученных от бортового измерителя натяжения, параметрам конфигурации указанных гироглайдера, ротора и лопастей, и последующего формирования выходного сигнала о состоянии указанного фала, указанный контроллер выбирается из группы, содержащей компьютеризированное устройство управления и автопилот; первое управляющее устройство, выполненное для получения выходного сигнала о состоянии фала и селективного управления шагом ротора в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; второе управляющее устройство, выполненное для получения сигнала о состоянии фала и селективного управления шагом лопастей в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; тяговую лебедку, установленную непосредственно на поверхности, выбранной из земной поверхности и водной поверхности, указанная лебедка выполнена для получения выходного сигнала о состоянии фала, указанная лебедка выполнена для наматывания или разматывания фала в заранее установленном систематическом порядке в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном, фал наматывается непосредственно за указанный первый конец фала; указанная лебедка является по меньшей мере одним элементом, выбранным из группы, содержащей бобину, катушку и барабан; преобразователь, выполненный для преобразования энергии вращения лебедки в электрическую энергию в форме, выбранной из группы, содержащей передаваемую, накапливаемую формы, и обе формы одновременно, передаваемую и накапливаемую, указанный преобразователь выбран из группы, содержащей электрогенератор, гидравлический двигатель, двигатель-генератор и газовый компрессор; и соединительное устройство, выполненное для обеспечения соединения лебедки с преобразователем и дополнительно соединенное посредством муфты и маховика, указанные муфта и маховик выполнены для регулирования крутящего момента на входе указанного преобразователя. 2. Устройство по п.1, в котором ось вращения образована опорой, к которой прикреплен ротор. 3. Устройство по п.1, в котором указанный гироглайдер размещен на некотором расстоянии от другого гироглайдера в ряду гироглайдеров на фале в случае, когда используется более одного гироглайдера. 4. Устройство по п.1, в котором указанное первое управляющее устройство содержит по меньшей мере одно устройство, выбранное из группы, состоящей из указанной рамы, содержащей направляющую, определяющую траекторию зубчатого колесика,управляемого сервоприводом, указанное зубчатое колесико перемещается по направляющей и выполнено для управления шагом ротора,по меньшей мере двух регуляторов шага, перемещающихся по направляющим рамы, рама выполнена с углом расхождения боковой части, обеспечивающим заранее установленную длину направляю- 25019501 щих между передней и задней частями рамы, направляющая рамы предопределяет заданную траекторию перемещения малого зубчатого колеса, малое зубчатое колесо перемещается по направляющей, направляющая выполнена для обеспечения перемещения малого зубчатого колеса вперед и назад по направляющей, направляющие выбраны из группы, включающей гладкую направляющую, секторное зубчатое колесо с внутренним зацеплением, гладкую направляющую из двух частей, передней и задней, с зоной фиксированного положения между передней и задней частями для обеспечения предпочтительного положения рамы, удерживаемой фалом, и зубчатую направляющую из двух частей, передней и задней, с зоной фиксированного положения между передней и задней частями для обеспечения предпочтительного положения рамы, удерживаемой фалом; и регулятора крена, перемещающегося по направляющей между регуляторами шага, левая и правая части рамы соединены между собой под углом, обеспечивающим заранее установленную длину направляющей; поворотной платформы, выполненной для поворота относительно заранее определенной оси вращения на раме, платформа имеет передний торец и задний торец, отстоящие друг от друга на заранее определенном расстоянии, ось вращения платформы выполнена непосредственно в области переднего торца, платформа выполнена для совершения поворота своим задним торцом относительно оси вращения на раме и снабжена силовым упругим элементом, непосредственно соединенным с рамой, силовой упругий элемент выполнен для придания платформе определенного положения относительно рамы; ротора, имеющего шарнирные соединения между втулкой ротора и лопастями, шарнирные соединения выполнены для соединения каждой лопасти с рукавом втулки ротора, при этом каждый рукав втулки жестко соединен с втулкой и вращается с ней заодно, комель каждой лопасти соединяется с каждым рукавом ротора посредством шарнирного пальца, при этом ось вращения шарнирного пальца перпендикулярна радиусу, проходящему через центр вращения втулки ротора; ротора, имеющего шарнирные соединения между втулкой ротора и лопастями, шарнирные соединения выполнены для соединения каждой лопасти с рукавом втулки ротора, причем каждый рукав втулки жестко соединен с втулкой и вращается с ней заодно, комель каждой лопасти соединяется с каждым рукавом ротора посредством шарнирного пальца, при этом ось вращения шарнирного пальца скошена под углом к радиусу, проходящему через центр вращения втулки ротора; регулятора, выполненного для осуществления притягивания передней консоли гироглайдера вниз или ее освобождения с целью придания консоли степени свободы для движения вверх в целях управления шагом гироглайдера, регулятор выполнен с возможностью увеличения или сокращения расстояния от самого регулятора до оконечностей плечей рычага управления креном, рычаг управления креном имеет плечи рычага по обеим сторонам гироглайдера в целях управления креном гироглайдера; и уздечки, содержащей первый тросик управления шагом и второй тросик управления шагом, соединенные с передней консолью и задней частью рамы гироглайдера соответственно, тросики далее соединены с управляющим устройством, и первый тросик управления креном и второй тросик управления креном, каждый из тросиков соединен с оконечностями плечей рычага управления креном, тросики далее соединены с управляющим устройством, и устройство управления креном, выбранное из группы, содержащей зубчатую направляющую, гидроцилиндр, тросик и металл с памятью формы, смонтированное в нижней части рамы в совокупности,как минимум, с одним сервоприводом; уздечки, состоящей из первого и второго управляющих тросиков, данные тросики имеют ближний и дальний концы,дальние концы первого и второго тросиков соединены с задней и передней частями рамы соответственно, ближний конец первого управляющего тросика соединен с задней частью рамы посредством сервопривода, ближний конец второго управляющего тросика соединен с передней частью посредством другого сервопривода в случае наличия двух устройств управления креном; и управляющего устройства, соединенного с ближними концами первого и второго управляющих тросиков, выполненного для натяжения или ослабления первого управляющего тросика и второго управляющего тросика для управления шагом, управляющее устройство выполнено совместно с сервоприводом для натяжения или ослабления первого и второго управляющих тросиков посредством перемещения влево или вправо относительно рамы для управления креном. 5. Устройство по п.1, в котором указанная рама снабжена монтажной платформой, выбранной из группы, содержащей платформу для монтажа контрольно-измерительного и коммуникационного оборудования, систем сбора метеоданных, радиолокационных систем, систем пожарообнаружения, систем слежения за наземными объектами, систем средств связи и трансляционных усилителей мобильной связи. 6. Устройство по п.1, в котором имеется подшипник для снижения трения между ротором и опорой,подшипник снабжен элементами качения, работающими между внутренним кольцом подшипника, выполненным жестко закрепленным относительно вращения опоры или отсутствия такового и вращающимся наружным кольцом, элементы качения выбраны из группы, включающей роликовые упорные элементы и шариковые элементы. В качестве альтернативного варианта, подшипник снабжен элементами качения, работающими между вращающимся внутренним кольцом и внешним кольцом, выполненным жестко закрепленным относительно вращения опоры или отсутствия такового. 7. Устройство по п.1, указанное устройство содержит по меньшей мереодну систему, выбранную из группы, содержащей раму, выполненную в виде трубы; ротор, дополнительно содержащий шарнирные соединения, выполненные между втулкой ротора и лопастями, оси вращения шарнирных соединений скошены под углом по отношению к радиусу, проходящему через центр втулки ротора; и первое управляющее устройство, содержащее воздействующее устройство, непосредственно соединенное с рамой и хвостовой балкой, хвостовая балка закреплена на внутреннем кольце подшипника, воздействующее устройство снабжено штоком и размещено в корпусе, корпус воздействующего устройства закреплен на раме, воздействующее устройство перемещением штока обеспечивает вращение хвостовой балки для управления шагом ротора,подшипник для снижения трения между ротором и опорой ротора, подшипник снабжен элементами качения, работающими между вращающимся внутренним кольцом подшипника и внешним кольцом,выполненным закрепленным относительно вращения опоры или отсутствия такового; генератор электрической энергии в виде обмотки, закрепленной на внутреннем кольце и на внешнем кольцах подшипника, обмотка выполнена для прохождения через магнитное поле, создаваемое магнитом, установленным на внутреннем кольце, генератор обеспечивает энергию, достаточную для питания контрольноизмерительного и управляющего оборудования, установленного на гироглайдере,шасси, установленное на раме в одном из вариантов, выбранных из группы, включающей выдвигаемое шасси, постоянное (неубирающееся) шасси, убирающееся шасси, гироглайдер имеет возможность взлетать или приземляться на посадочную площадку, опираясь на шасси, при этом посадочная площадка выполнена поворачивающейся вокруг шарнира на заранее установленный угол стыковки, соответствующий шагу ротора, посадочная площадка установлена на поворотной платформе наверху конструкции или сооружения, выбранного из группы, включающей здания, сооружения башенного типа и вышки, баржи,бакены, суда и транспортные средства,посадочное устройство с ограничительной щелью; два опорных рычага, каждый рычаг имеет ближний конец и дальний конец, опорные рычаги своими дальними концами подвижно прикреплены к посадочному устройству; пустотелую поворотную платформу, опорные рычаги своими ближними концами подвижно прикреплены к платформе; первый и второй управляющие тросы, заведенные в ограничительную щель и предназначенные для управления креном и шагом ротора, первый и второй управляющие тросы сведены в узел и далее образуют фал; и направляющий блок, жестко закрепленный к поверхности, выбранной из группы, включающей здания, сооружения башенного типа и вышки, баржи, бакены, речные и морские суда, причем направляющий блок размещен непосредственно под поворотной платформой в центре, первый конец фала заведен через направляющий блок,складирующее устройство, выполненное для выборочного снятия каждой рамы с соответствующего ротора на наземной станции, складирующее устройство выполнено для укладки роторов непосредственно один к одному с вставкой прокладочного материала между ними для последующего хранения, устройство дополнительно выполнено для обеспечения перемещения или перегруппировки любой рамы с соответствующим ей ротором; и захватное устройство, выполненное для присоединения рамы к втулке ротора, захватное устройство выполнено для выборочной фиксации рамы в заранее определенной точке фала,зубчатую направляющую с сервоприводом, установленную в нижней части рамы; и грузовой отсек, содержащий аккумуляторную батарею и иное бортовое оборудование, отсек установлен с возможностью скольжения вперед и назад для изменения центра тяжести (ЦТ) в целях контролируемого свободного полета,горизонтальный стабилизатор, установленный в хвостовой части гироглайдера, стабилизатор имеет рули для обеспечения создания противодействующей силы, направленной вниз, для уравновешивания подъемной силы в центре давления (ЦД) ротора, в целях контролируемого свободного полета, и устройство изменения угла крена ротора, определяемого углом между вертикальной осью гироглайдера и вертикальной плоскостью к поверхности земли, включающей продольную ось гироглайдера; и устройство для управления маневрированием гироглайдера, устройство выполнено для обеспечения маневрирования гироглайдера при боковом ветре таким образом, что возникает скорость бокового отклонения, причем возникшая относительная скорость превышает скорость окружающего воздушного потока, что приводит к натяжению фала. 8. Устройствопо п.1, в котором указанное второе управляющее устройство содержит по меньшей мере одно устройство, выбранное из группы, состоящей из ротора, дополнительно содержащего шарнирные соединения, выполненные между втулкой ротора и лопастями, оси вращения шарнирных соединений скошены под углом по отношению к радиусу, проходящему через центр втулки ротора, шарнирные соединения лопастей позволяют лопастям совершать маховые движения в целях управления шагом каждой лопасти,ротора, при этом ротор имеет шарнирные соединения между втулкой ротора и лопастями, оси вращения шарниров выполнены перпендикулярно по отношению к радиусу, проходящему через центр втулки ротора, наличие шарнирных соединений позволяет лопастям осуществлять маховые движения, что дает возможность управления шагом каждой лопасти, лопасти установлены под углом по направлению движения передней кромки лопасти,ротора, имеющего шарнирные соединения между втулкой и лопастями; и механизма смещения, установленного между втулкой ротора и каждой лопастью и закрепленного посредством крепежного устройства, выбранного из группы, состоящей из фиксирующего штыря, фиксирующей стойки или грибовидного стержня, механизм выполнен для обеспечения смещения каждой лопасти вверх, является упругим элементом и подвергается воздействию центробежной силы, механизм предназначен для осуществления пассивного управления шагом ротора, и ротора, имеющего шарнирные соединения между втулкой и лопастями; и механизма смещения, установленного между втулкой ротора и каждой лопастью и закрепленного посредством крепежного устройства, выбранного из группы, состоящей из фиксирующего штыря, фиксирующей стойки или грибовидного стержня, механизм выполнен для обеспечения смещения каждой лопасти вверх, при этом механизм выполнен в виде сервопривода для осуществления активного управления шагом ротора. 9. Устройство по п.1, в котором реактивные двигатели установлены на концах лопастей, реактивные двигатели приводятся в действие дистанционно с наземной станции и выполнены для обеспечения управления полетом гироглайдера во время старта и приземления. 10. Устройство по п.1, в котором указанный фал хранится в накопительном устройстве, содержащем контейнер с глухой цилиндрической стенкой и открытой верхней поверхностью, контейнер имеет диаметр, чуть больший диаметра рулона полностью смотанного фала, причем на цилиндрическую стенку контейнера нанесено покрытие для уменьшения трения и теплообразования; центральный валик с цилиндрической стенкой, валик обеспечивает заполнение объема и установлен соосно внутри контейнера, валик определяет свободный объем для укладки фала между валиком и стенкой контейнера, объем для помещения фала достаточен для укладки в предопределенном порядке аккуратными ровными витками и обеспечивает отсутствие перехлестов и скручиваний фала при его размещении в контейнере, на цилиндрической стенке вала выполнено покрытие; и ведущий ролик, направляющий блок и направляющая выполнены для укладки фала через центр верхней открытой поверхности в контейнер с заранее установленной скоростью и только в одном направлении. 11. Устройство по п.1, в котором указанный контроллер выполнен для управления гироглайдером в соответствии с сигналами навигационной системы, установленной на гироглайдере, навигационная система выбрана из группы, содержащей систему глобального позиционирования и устройство определения местоположения по радиомаякам, контроллер выполнен с возможностью исключения помех от воздействия навигационной системы, установленной на другом гироглайдере. 12. Способ получения энергии с использованием устройства по п.1, включающий создание подъемной силы для гироглайдера за счет вращения его ротора вокруг оси вращения; обеспечение наличия фала, заведенного на тяговую лебедку, фал имеет первый и второй концы; размещение первого конца фала непосредственно на земле, второй конец вытягивается вверх,закрепление гироглайдера на втором конце фала; подключение тяговой лебедки к преобразователю; измерение натяжения в фале, существующего или добавленного; измерение скорости воздушного потока, воздействующего на гироглайдер; систематический контроль натяжения фала и формирование выходных данных об уровне натяжения; выполнение запуска и полета гироглайдера на фале, в ходе которого осуществляется селективное управление шагом ротора в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; осуществляется селективное управление шагом лопастей в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; и осуществляется управление натяжением фала посредством перемежающихся циклов его сматывания или ослабления, выполняемых преобразователем, причем в последнем случае преобразователь работает в режиме реверса, в случае, когда выходной сигнал содержит значение, слишком маленькое или слишком высокое по сравнению с заранее определенным диапазоном; и преобразование вращательной энергии тяговой лебедки в электрическую энергию. 13. Способ получения энергии по п.12, в котором гироглайдер закрепляется на фале с размещением на некотором расстоянии от другого гироглайдера в ряду гироглайдеров на фале в случае, когда в соответствии с настоящим изобретением используется более одного гироглайдера. 14. Способ получения энергии по п.12, в котором полет гироглайдера на фале включает по меньшей мере одно действие, выбранное из группы, содержащей управление полетом гироглайдера автопилотом,управление полетом гироглайдера посредством автопилота в соответствии с данными о положении и координатах гироглайдера, полученными установленной на гироглайдере навигационной системой,навигационная система защищена от помех, возникающих при работе навигационных систем других гироглайдеров в случае одновременного полета более одного гироглайдера,управление натяжением фала, уменьшение натяжения понижением шага лопасти и увеличение натяжения увеличением шага лопасти,управление натяжением фала путем реагирования ротора на изменение натяжения, при этом шаг лопастей ротора уменьшается при увеличении натяжения и увеличивается при падении натяжения, и поддержание шага ротора постоянным; изменение угла крена ротора, определяемого углом между вертикальной осью гироглайдера и вертикальной плоскостью к поверхности земли, включающей продольную ось гироглайдера; маневрирование гироглайдером в боковом ветре таким образом, что возникает скорость бокового смещения; создание относительной скорости воздушного потока, набегающего на ротор, превышающей скорость действительного окружающего воздушного потока; и применение маневрирования. 15. Способ получения энергии по п.12, в котором селективное управление шагом лопасти содержит по меньшей мере одно действие, выбранное из группы, состоящей из пассивного управления отклонением каждой лопасти вверх за счет установки устройств отклонения лопастей в виде упругих силовых элементов, вызывающих поворот лопастей по направлению к оси вращения,воздействия на лопасти центробежной силы, увеличивающейся с увеличением скорости вращения ротора и противодействующей усилию натяжения в устройстве отклонения каждой лопасти, данное воздействие выравнивает лопасти,активного управления отклонением каждой лопасти вверх за счет установки устройств отклонения лопастей в виде сервоприводов, вызывающих поворот лопастей по направлению к оси вращения,уменьшения и увеличения шага ротора,взаимосвязи шага лопасти с углом конусности ротора, угол конусности представляет собой угол между осью лопасти и осью вращения ротора, и взаимосвязь шага лопасти с углом конусности ротора, угол конусности представляет собой угол между осью лопасти и осью вращения ротора; селективное управление шагом лопастей также включает осуществление изменения угла конусности, которое производится посредством изменения равновесия сил, действующих на лопасти со стороны фала и набегающего воздушного потока. 16. Способ получения энергии по п.12, дополнительно содержащий по меньшей мере одно действие или группу действий, выбранное из группы, состоящей из предварительной раскрутки ротора набегающим воздушным потоком установкой отрицательного значения шага лопастей; и передачи энергии набегающего воздушного потока лопастям, при этом ротор работает, как минимум, в качестве ветрогенератора или ветротурбины,активного управления гироглайдером путем селективного поворота лопастей из положения работы в режиме турбины с отрицательным шагом лопастей в положение авторотации с положительным шагом,наличия поворотной платформы, соединенной с ротором и обеспечивающей вращение ротора и возможность поворота платформы относительно рамы; подтягивания гироглайдера посредством работы тяговой лебедки в связи с падением скорости набегающего воздушного потока ниже порогового значения; подтягивания гироглайдера с относительной скоростью, достаточной для управляемого полета гироглайдера по направлению к лебедке; полета гироглайдера в режиме спуска непосредственно к лебедке в связи с падением скорости набегающего воздушного потока ниже порогового значения, требующегося либо для управляемого полета,либо для производства энергии,наличия шасси, установленного на раме; размещения посадочной поверхности в непосредственной близости от тяговой лебедки, посадочная поверхность закрепляется на полой объемной поверхности; протягивания фала от лебедки через щель в посадочной поверхности;
МПК / Метки
МПК: B64C 31/02, F03D 9/00
Метки: управления, помощи, способ, устройство, получение, электроэнергии, гироглайдера
Код ссылки
<a href="https://eas.patents.su/30-19501-poluchenie-elektroenergii-pri-pomoshhi-giroglajjdera-ustrojjstvo-i-sposob-upravleniya.html" rel="bookmark" title="База патентов Евразийского Союза">Получение электроэнергии при помощи гироглайдера, устройство и способ управления</a>
Способ управления потреблением электроэнергии со стороны потребителей, соответствующее устройство и система
Номер патента: 17839
Опубликовано: 29.03.2013
Авторы: Томас Раджив, Пол Джо, Гёдарт Эндрю Перегрин
МПК: H02J 3/14
Метки: управления, электроэнергии, стороны, соответствующее, устройство, потреблением, система, потребителей, способ
Формула / Реферат:
1. Способ управления потреблением электроэнергии со стороны потребителей, включающийизмерение на удаленном узле, который находится на удалении от места фактического потребления электричества, потребления электроэнергии потребителем;обеспечение потребителя электричества измерениями текущего потребления электроэнергии путем передачи потребителю с удаленного узла сообщения, содержащего измерение, в котором записано измеренное значение текущего...
Способ управления информацией, хранящейся на плате с чипом, считываемой при помощи мобильного телефона
Номер патента: 6287
Опубликовано: 27.10.2005
Автор: Обер Жан-Шарль
МПК: G06F 19/00
Метки: помощи, хранящейся, телефона, плате, информацией, управления, способ, чипом, мобильного, считываемой
Формула / Реферат:
1.Способ управления информацией при помощи телекоммуникационного оборудования, снабженного экраном и оборудованного соединителем для подключения платы с чипом типа SIM, включающий регистрацию информации в регистре памяти стандартной платы SIM, соответствующем номеру IMSI в цифровой последовательности вывода данных, значение которого не присвоено ни оператору сети связи, ни стране, причем указанная информация не соответствует телекоммуникационной...
Способ для сталкивания предмета с транспортера при помощи толкателя и устройство для его осуществления
Номер патента: 1366
Опубликовано: 26.02.2001
Авторы: Дарвиш Рэд И., Патрик Ричард
МПК: B65G 47/82
Метки: осуществления, предмета, толкателя, устройство, помощи, способ, сталкивания, транспортера
Формула / Реферат:
1. Способ сталкивания предмета (11) с транспортёра (12) на отводящее устройство (13) при помощи узла (10) толкателя с толкающим элементом (22), содержащим расположенную выше по потоку часть (70) и расположенную ниже по потоку часть (78), причём транспортёр (12) осуществляет перемещение предмета (11) от расположенного выше по потоку конца к расположенному ниже по потоку концу транспортёра (12), а предмет (11) имеет расположенный ниже по потоку...
Подъемное устройство, устройство для выработки электроэнергии и устройство для обратного осмоса морской воды
Номер патента: 17901
Опубликовано: 30.04.2013
Автор: Джин Джифан
МПК: H02K 35/00, F03G 7/00, C02F 1/44...
Метки: выработки, электроэнергии, устройство, воды, осмоса, обратного, морской, подъемное
Формула / Реферат:
1. Подъемное устройство, отличающееся тем, что оно содержитпо меньшей мере одно первое магнитное тело, расположенное на платформе и перемещаемое приводом вдоль заданной траектории;по меньшей мере одно второе магнитное тело, которое расположено над частью траектории первого магнитного тела и магнетизм которого всегда проявляется в отталкивании от первого магнитного тела;подъемный механизм, расположенный на опорном приспособлении и соединенный со...
Способ сушки листа целлюлозного материала при помощи горячего воздуха, перемещающегося в высоком вакууме, устройство для осуществления этого способа
Номер патента: 216
Опубликовано: 24.12.1998
Авторы: Леза Клод, Лерве Жан, Кьенс Эмманюэль, Маршал Поль
МПК: D21F 5/18
Метки: целлюлозного, вакууме, листа, материала, горячего, этого, способа, сушки, способ, воздуха, помощи, осуществления, высоком, перемещающегося, устройство
Формула / Реферат:
1. Способ обезвоживания целлюлозосодержащего листового материала, в частности влажного бумажного листа с массой от 10 до 80 г/м2 в высушенном состоянии и с исходной степенью сухости от 8 до 30%, получаемой, например, после обезвоживания на формующей сетке, заключающийся в закреплении листового материала на проницаемом полотне и пропускании через него, по крайней мере, одного потока горячего воздуха с высокой скоростью, отличающийся тем, что...
Предыдущий патент: Фотоэлектрический элемент
Следующий патент: Способ очистки и промывки системы раздачи напитков
Случайный патент: Водная силикатная композиция.