Способ и устройство обнаружения посторонних частиц или дефектов в совокупности наполненных контейнеров
Номер патента: 12468
Опубликовано: 30.10.2009
Авторы: Нильсен Хенрик Меллер, Серенсен Пер Томас, Воигт Аксель
Формула / Реферат
1. Способ обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих флюид или жидкость, способ содержит этапы, на которых
перемещают совокупность контейнеров вдоль пути перемещения между источником света и первой камерой, причем указанные контейнеры с флюидом или жидкостью, по меньшей мере, частично прозрачны или полупрозрачны для излучения от указанного источника света,
при этом первая камера включает в себя микросхему КМОП и задает поле зрения, так что путь перемещения пересекает поле зрения,
вращают каждый из контейнеров в направлении по часовой стрелке и/или против часовой стрелки для приведения в движение флюида, содержащегося в каждом из контейнеров,
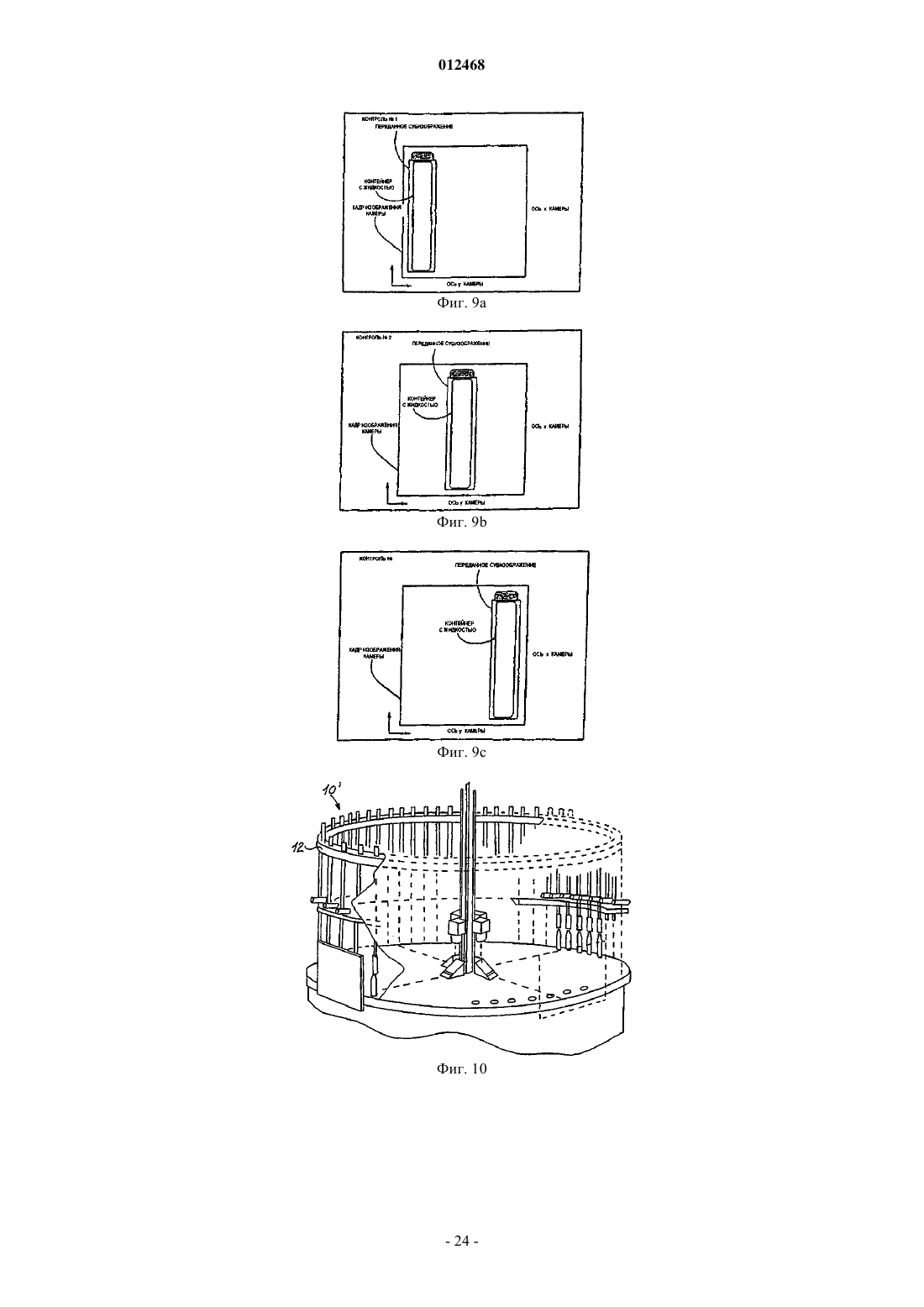
останавливают вращение каждого из контейнеров прежде, чем каждый из контейнеров войдет в поле зрения, или останавливают вращение каждого из контейнеров после того, как каждый из контейнеров войдет в поле зрения, причем первая камера регистрирует последовательность цифровых изображений по мере того, как контейнер проходит между источником света и камерой, а флюид продолжает вращение в невращающемся контейнере,
выбирают часть каждого из цифровых изображений, причем часть, по существу, соответствует контуру конкретного контейнера,
передают каждую из частей на блок цифровой обработки изображений,
причем блок цифровой обработки изображений обрабатывает часть последовательности цифровых изображений, посредством сравнения части изображений последовательности с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере,
причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере.
2. Способ по п.1, в котором обработку осуществляют посредством блока цифровой обработки изображений, сравнивающего по меньшей мере две части двух определенных цифровых изображений, для обнаружения нежелательных объектов или дефектов в конкретном контейнере.
3. Способ по п.1, в котором обработку осуществляют посредством блока цифровой обработки изображений, анализирующего по меньшей мере одно цифровое изображение, для обнаружения нежелательных объектов или дефектов в конкретном контейнере.
4. Способ по п.1, в котором обработку осуществляют посредством вычитания двух изображений в последовательности или вне последовательности.
5. Способ по п.1, в котором обработку осуществляют посредством сравнения части конкретного цифрового изображения с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере.
6. Способ по любому из пп.1-5, в котором источник света располагается по одну сторону пути перемещения напротив камеры и/или источник света располагается по ту же сторону от пути перемещения, что и камера.
7. Способ по любому из предыдущих пунктов, в котором контейнеры транспортируют, по существу, с постоянной скоростью вдоль пути перемещения.
8. Способ по любому из предыдущих пунктов, дополнительно содержащий этапы, на которых
используют вторую камеру, включающую в себя вторую микросхему КМОП, для регистрации света с определенным спектральным распределением, излучаемого вторым источником света, причем между вторым источником света и второй камерой задана вторая линия визирования, путь перемещения пересекает вторую линию визирования, вторая микросхема КМОП создает цифровое изображение, содержащее второе определенное количество пикселей,
вторая камера регистрирует вторую последовательность кадров, образующую второе множество цифровых изображений, при прохождении контейнера между вторым источником света и второй камерой,
выбирают вторую часть каждого из цифровых изображений второй последовательности, причем вторая часть, по существу, соответствует контуру конкретного контейнера,
передают каждую из вторых частей на блок цифровой обработки изображений,
причем блок цифровой обработки изображений обрабатывает второе множество частей цифровых изображений для обнаружения нежелательных объектов или дефектов в конкретном контейнере,
сравнивают результат второй обработки с первой обработкой для подтверждения результата первой обработки.
9. Способ по п.8, дополнительно содержащий этапы, на которых
при условии, что обработка первого множества цифровых изображений приводит к установлению наличия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению наличия объекта или дефекта, конкретный контейнер подлежит выбраковке, и/или альтернативно
при условии, что обработка первого множества цифровых изображений приводит к установлению отсутствия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению наличия объекта или дефекта, конкретный контейнер подлежит повторному анализу, и/или альтернативно
при условии, что обработка первого множества цифровых изображений приводит к установлению наличия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению отсутствия объекта или дефекта, конкретный контейнер подлежит повторному анализу, и/или альтернативно
при условии, что обработка первого множества цифровых изображений приводит к установлению отсутствия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению отсутствия объекта или дефекта в конкретном контейнере, он пропускается для дальнейшей обработки.
10. Способ обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих флюид или жидкость, способ содержит этапы, на которых перемещают совокупность контейнеров вдоль пути перемещения между первым источником света и первым устройством регистрации света, причем контейнеры с флюидом или жидкостью, по меньшей мере, частично прозрачны или полупрозрачны для излучения от первого источника света, а также между вторым источником света и вторым устройством регистрации света,
причем первое устройство регистрации света создает первое цифровое изображение и задает первое поле зрения так, что путь перемещения пересекает первое поле зрения, а второе устройство регистрации света создает второе цифровое изображение и задает второе поле зрения так, что путь перемещения пересекает второе поле зрения,
вращают каждый из контейнеров в направлении по часовой стрелке и/или против часовой стрелки для приведения в движение флюида, содержащегося в каждом из контейнеров,
останавливают вращение каждого из контейнеров прежде, чем каждый из контейнеров войдет в первое и второе поле зрения соответственно, или
останавливают вращение каждого из контейнеров после того, как каждый из контейнеров войдет в первое и второе поле зрения соответственно,
первое и второе устройства регистрации света регистрируют первую и вторую последовательности цифровых изображений по мере того, как контейнер проходит между первым и вторым источниками света и первым и вторым устройствами регистрации света соответственно, а флюид продолжает вращение в невращающемся контейнере,
выбирают часть каждого из цифровых изображений первой и второй последовательности, причем часть, по существу, соответствует контуру конкретного контейнера,
передают каждую из частей на блок цифровой обработки изображений,
причем блок цифровой обработки изображений обрабатывает часть первой и второй последовательности цифровых изображений посредством сравнения части изображений первой и второй последовательности с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере,
причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере.
11. Способ по п.10, в котором первое и второе устройства регистрации света представляют собой камеры, каждая из которых включает в себя по меньшей мере одну микросхему КМОП.
12. Способ по п.10 или 11, дополнительно включающий в себя любой из этапов, охарактеризованных в пп.2-7 или 9.
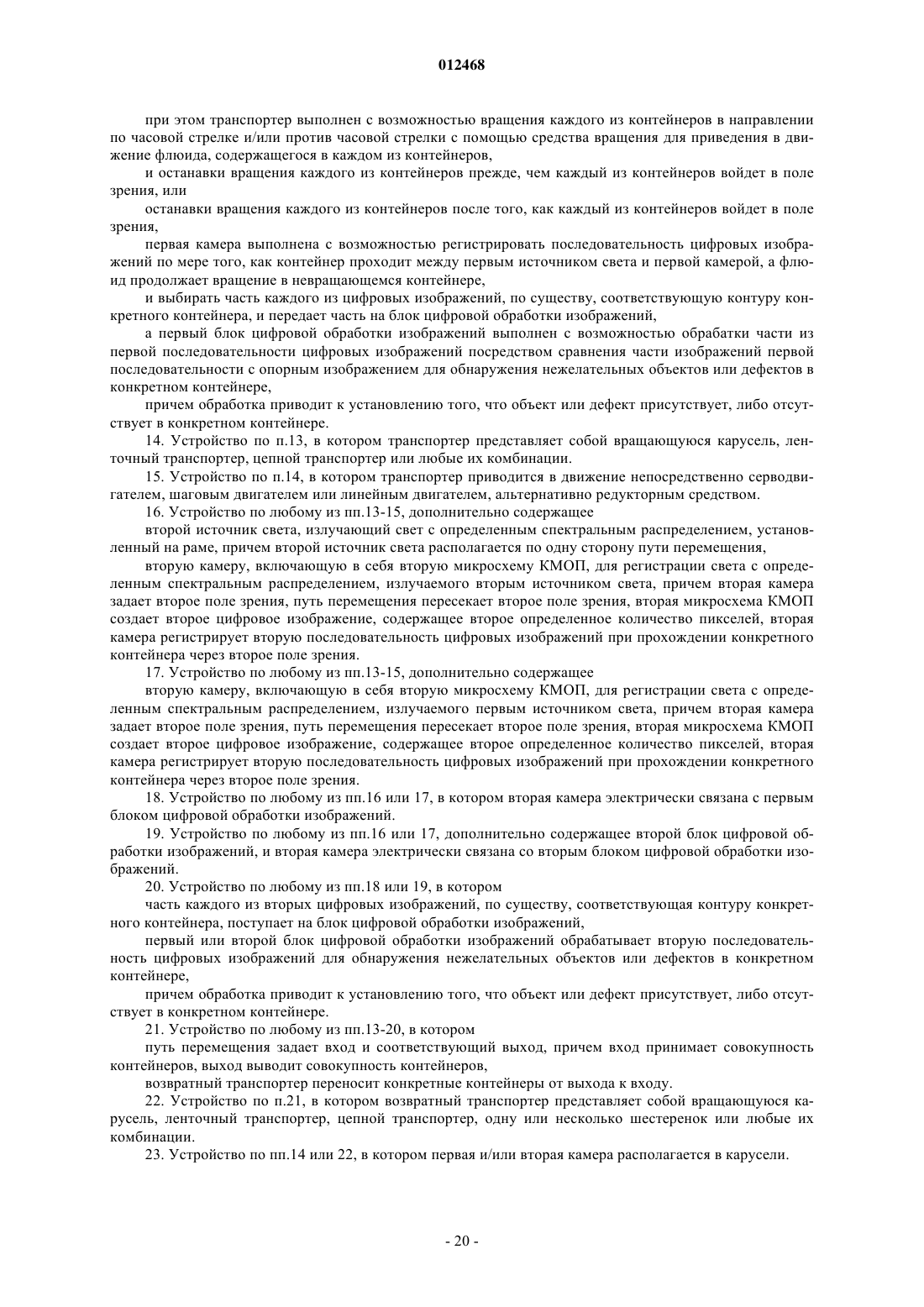
13. Устройство для обнаружения нежелательных объектов шыш дефектов в совокупности контейнеров, содержащих флюид или жидкость, устройство содержит
раму,
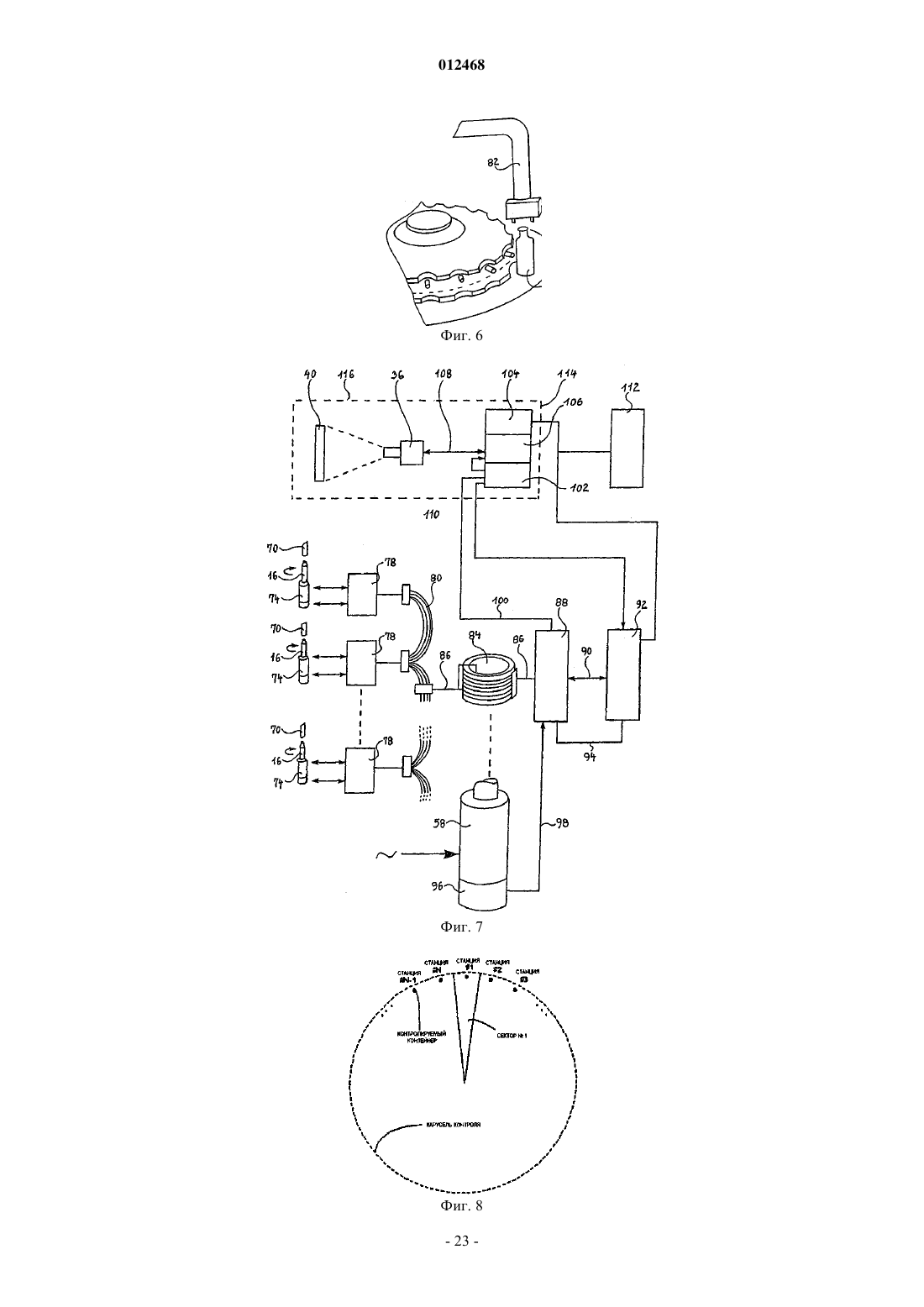
транспортер, установленный на раме, образующий путь перемещения совокупности контейнеров, причем транспортер имеет вход и соответствующий выход, причем вход принимает совокупность контейнеров, выход выводит совокупность контейнеров,
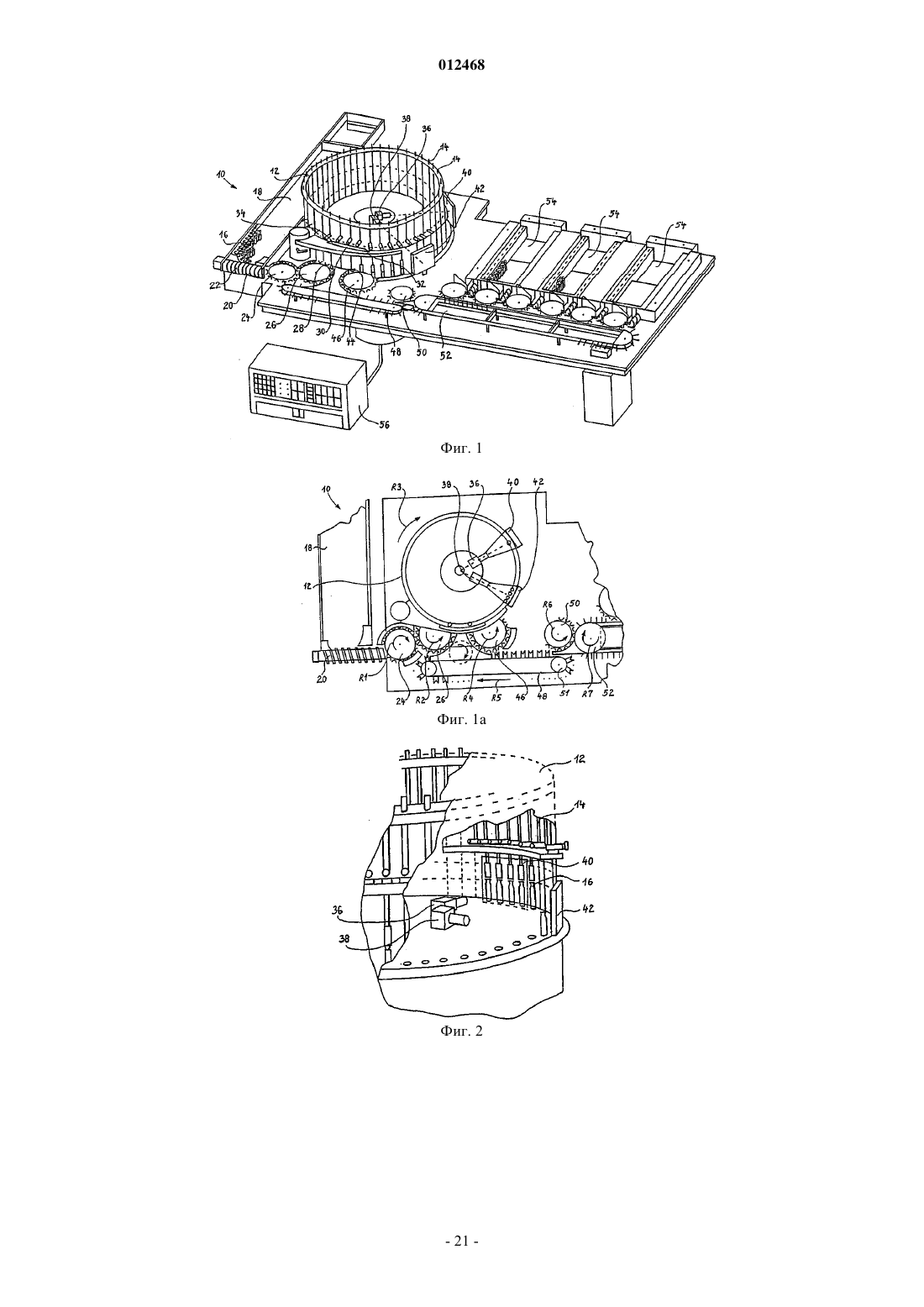
первый источник света, установленный на раме, причем первый источник света располагается по одну сторону пути перемещения, а контейнеры с флюидом или жидкостью, по меньшей мере, частично прозрачны или полупрозрачны для излучения от первого источника света,
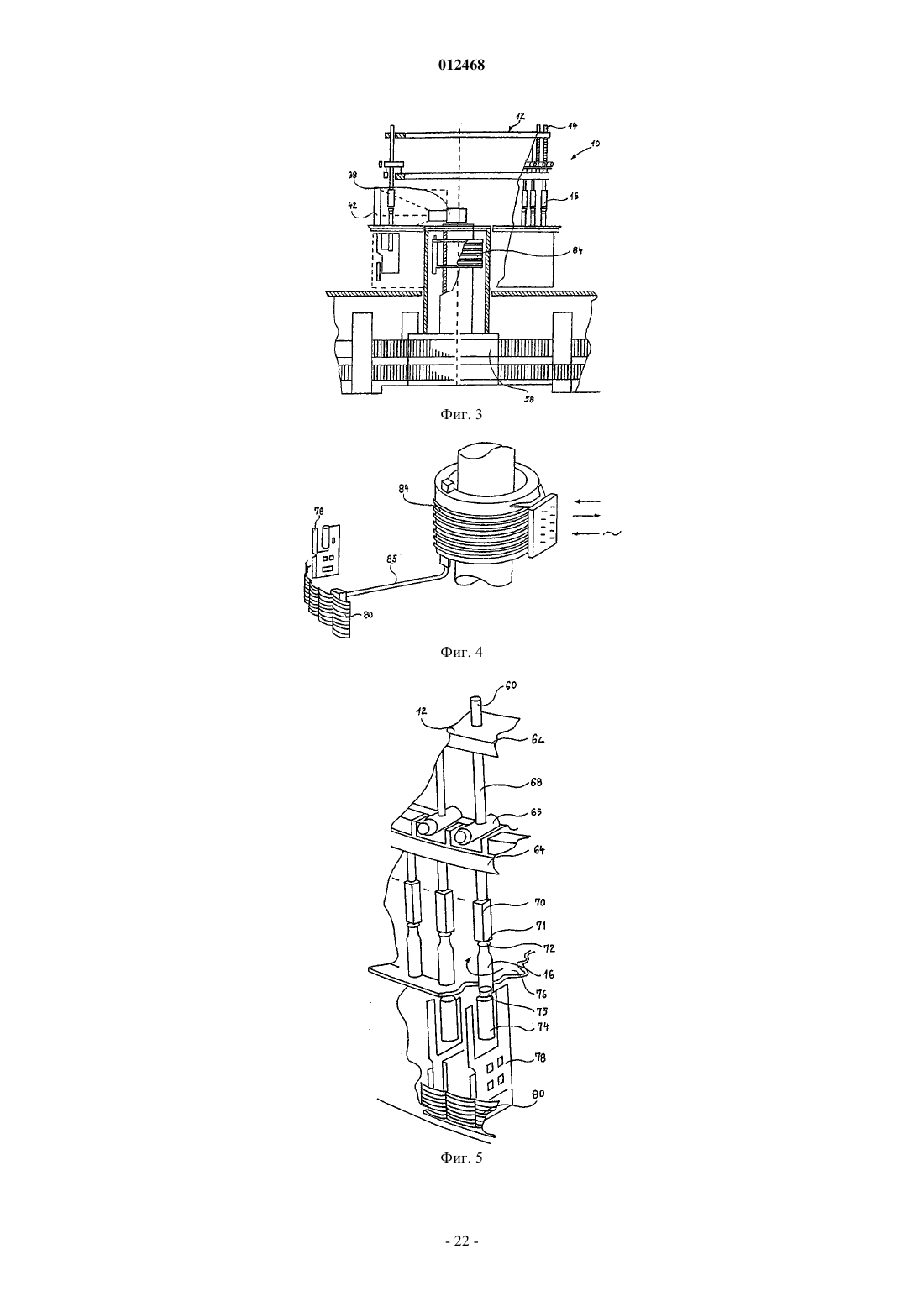
первую камеру, включающую в себя первую микросхему КМОП, причем первая камера установлена на раме и задает первое поле зрения так, что путь перемещения пересекает первое поле зрения, а первая микросхема КМОП создает первое цифровое изображение, первый блок цифровой обработки изображений, электрически связанный с первой камерой,
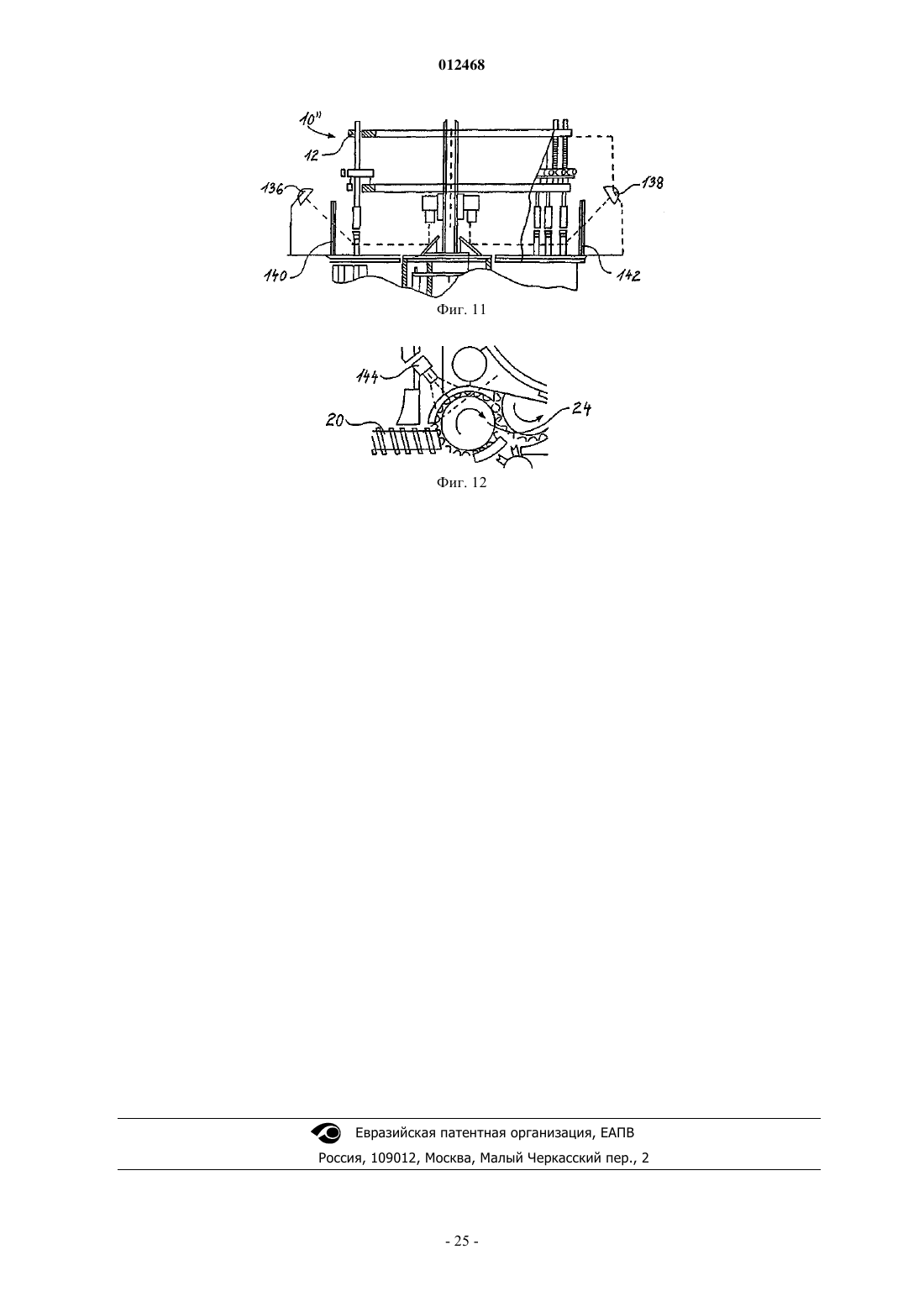
при этом транспортер выполнен с возможностью вращения каждого из контейнеров в направлении по часовой стрелке и/или против часовой стрелки с помощью средства вращения для приведения в движение флюида, содержащегося в каждом из контейнеров,
и останавки вращения каждого из контейнеров прежде, чем каждый из контейнеров войдет в поле зрения, или
останавки вращения каждого из контейнеров после того, как каждый из контейнеров войдет в поле зрения,
первая камера выполнена с возможностью регистрировать последовательность цифровых изображений по мере того, как контейнер проходит между первым источником света и первой камерой, а флюид продолжает вращение в невращающемся контейнере,
и выбирать часть каждого из цифровых изображений, по существу, соответствующую контуру конкретного контейнера, и передает часть на блок цифровой обработки изображений,
а первый блок цифровой обработки изображений выполнен с возможностью обрабатки части из первой последовательности цифровых изображений посредством сравнения части изображений первой последовательности с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере,
причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере.
14. Устройство по п.13, в котором транспортер представляет собой вращающуюся карусель, ленточный транспортер, цепной транспортер или любые их комбинации.
15. Устройство по п.14, в котором транспортер приводится в движение непосредственно серводвигателем, шаговым двигателем или линейным двигателем, альтернативно редукторным средством.
16. Устройство по любому из пп.13-15, дополнительно содержащее
второй источник света, излучающий свет с определенным спектральным распределением, установленный на раме, причем второй источник света располагается по одну сторону пути перемещения,
вторую камеру, включающую в себя вторую микросхему КМОП, для регистрации света с определенным спектральным распределением, излучаемого вторым источником света, причем вторая камера задает второе поле зрения, путь перемещения пересекает второе поле зрения, вторая микросхема КМОП создает второе цифровое изображение, содержащее второе определенное количество пикселей, вторая камера регистрирует вторую последовательность цифровых изображений при прохождении конкретного контейнера через второе поле зрения.
17. Устройство по любому из пп.13-15, дополнительно содержащее
вторую камеру, включающую в себя вторую микросхему КМОП, для регистрации света с определенным спектральным распределением, излучаемого первым источником света, причем вторая камера задает второе поле зрения, путь перемещения пересекает второе поле зрения, вторая микросхема КМОП создает второе цифровое изображение, содержащее второе определенное количество пикселей, вторая камера регистрирует вторую последовательность цифровых изображений при прохождении конкретного контейнера через второе поле зрения.
18. Устройство по любому из пп.16 или 17, в котором вторая камера электрически связана с первым блоком цифровой обработки изображений.
19. Устройство по любому из пп.16 или 17, дополнительно содержащее второй блок цифровой обработки изображений, и вторая камера электрически связана со вторым блоком цифровой обработки изображений.
20. Устройство по любому из пп.18 или 19, в котором
часть каждого из вторых цифровых изображений, по существу, соответствующая контуру конкретного контейнера, поступает на блок цифровой обработки изображений,
первый или второй блок цифровой обработки изображений обрабатывает вторую последовательность цифровых изображений для обнаружения нежелательных объектов или дефектов в конкретном контейнере,
причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере.
21. Устройство по любому из пп.13-20, в котором
путь перемещения задает вход и соответствующий выход, причем вход принимает совокупность контейнеров, выход выводит совокупность контейнеров,
возвратный транспортер переносит конкретные контейнеры от выхода к входу.
22. Устройство по п.21, в котором возвратный транспортер представляет собой вращающуюся карусель, ленточный транспортер, цепной транспортер, одну или несколько шестеренок или любые их комбинации.
23. Устройство по пп.14 или 22, в котором первая и/или вторая камера располагается в карусели.

Текст
012468 Настоящее изобретение относится к способам обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих вещество. В данном контексте, термин вещество охватывает такие понятия, как флюиды, жидкости, порошки, гранулированные материалы, замороженные обезвоженные вещества, эмульсии, суспензии или любые их комбинации, также термины будут использоваться по отдельности, охватывая все вышеупомянутые термины. На или в контейнерах можно обнаружить объект или объекты. В материале, используемом для производства контейнеров, или на контейнерах можно обнаружить дефект или дефекты. Способы обнаружения нежелательных объектов или дефектов в контейнерах описаны в родственных патентных публикациях, например, WO 92/14142, ЕР 0 293 510, US 4,095,904, US 4,136,930, US 3,598,907, US 3,777,169, US 4,274,745, US 6,498,645, US 5,365,343, US 3,627,423, EP 1 241 467, US 5,523,560, US 5,694,221, US 6,226,081, US 4,750,035, US 4,959,537, US 5,067,616, US 4,915,237 и US 6,498,645, которые все опубликованы в США и, таким образом, включены в данное описание изобретения посредством ссылки в полном объеме для всех целей. Некоторые вышеописанные устройства и способы обнаружения нежелательных объектов, т.е. загрязнения, и дефектов в контейнерах, содержащих флюид или жидкость, основаны на использовании линейных сканеров. Также можно использовать камеры. Большинство устройств устроено так, что камера или линейный сканер и/или источник света подвижны, для обеспечения более одного прохода сканирования или обнаружения на контейнер, что может вызывать вибрацию, и требует сложной аппаратуры. Настоящее изобретение предусматривает, согласно первому аспекту настоящего изобретения, способ обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащий этапы, на которых: обеспечивают путь перемещения, вдоль которого транспортируют совокупность контейнеров,перемещают совокупность контейнеров вдоль пути перемещения,обеспечивают источник света, излучающий свет с определенным спектральным распределением,причем источник света располагается по одну сторону пути перемещения, контейнеры, по меньшей мере,частично прозрачны или полупрозрачны для света с определенным спектральным распределением, флюид или жидкость, по меньшей мере, частично прозрачна или полупрозрачна для света с определенным спектральным распределением,обеспечивают первую камеру, включающую в себя микросхему КМОП для регистрации света с определенным спектральным распределением, излучаемого источником света, причем первая камера формирует поле зрения, путь перемещения пересекает поле зрения, микросхема КМОП формирует цифровое изображение, содержащее определенное количество пикселей,вращают каждый из контейнеров в направлении либо по часовой стрелке, либо против часовой стрелки, для приведения в движение флюида, содержащегося в каждом из контейнеров,останавливают вращение каждого из контейнеров прежде, чем каждый из контейнеров попадает в поле зрения, пока флюид продолжает вращение, альтернативно,останавливают вращение каждого из контейнеров после того, как каждый из контейнеров попадает в поле зрения, пока флюид продолжает вращение,причем первая камера регистрирует последовательность цифровых изображений по мере того, как контейнер проходит между источником света и камерой,выбирают часть каждого из цифровых изображений, причем часть, по существу, соответствует контуру определенного контейнера,передают каждую из частей на блок цифровой обработки изображений,причем блок цифровой обработки изображений обрабатывает последовательность частей цифровых изображений для обнаружения нежелательных объектов или дефектов в определенном контейнере,причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. Камера, включающая в себя микросхему КМОП, регистрирует свет, излучаемый источником света. Поскольку свет от источника света имеет особое или определенное спектральное распределение, камера или микросхема КМОП в камере должна быть чувствительна к свету или излучению, поступающему в этом спектральном распределении, т.е. в этом спектре или интервале частот. Микросхема КМОП может быть чувствительной к свету вне спектрального распределения света, излучаемого источником света, а также источник света может излучать свет на частотах вне частотного спектра, который воспринимает микросхема КМОП. Изображения, полученные камерой, контролируются и/или анализируются, в частности, изображения анализируются для обнаружения дефектов или объектов на или в контейнере. В данном контексте термин контейнер надо рассматривать как общий термин, охватывающий все контейнеры, бутыли, резервуары, приемники, сосуды, способные принимать и хранить вещество, например флюид или жидкость. Контейнеры могут быть открытыми, закрытыми или герметизированными тем или иным образом. Контейнер может представлять собой, например, ампулы, картриджи, пузырьки,шприцы или другие контейнеры. Источник света может представлять собой любой источник электромагнитного излучения, обеспечивающий электромагнитное излучение с определенным спектральным распределением. Распределение-1 012468 может находиться в видимом спектре, но также может включать в себя инфракрасное, ближнее инфракрасное, ультрафиолетовое и электромагнитное излучение других длин волны. Вращение контейнеров на достаточно высокой скорости предусмотрено для вовлечения любых частиц или объектов, которые могут удерживаться на внутренней поверхности контейнера, например, на дне или боковой стенке контейнера, во вращение флюида или жидкости. Вращение контейнеров может осуществляться согласно конкретному профилю вращения, включающему в себя вращения в направлениях, как по часовой стрелке, так и против часовой стрелки, а также переменные скорости, отличные от скоростей, достигнутых при ускорении вращения. Согласно одному варианту осуществления, профиль вращения может включать в себя один период вращения в направлении по часовой стрелке, после которого следует один период вращения в направлении против часовой стрелки. Скорость вращения может варьироваться от 0 до 10000 об/м или где-то между ними или выше. Для конкретных применений можно использовать более высокие скорости вращения. Выбор скорости вращения может зависеть от вещества, содержащегося в контейнере; флюиды или жидкости с высокой вязкостью можно крутить быстрее, чем флюиды или жидкости с низкой вязкостью. Кроме того, на выбор скорости вращения может влиять количество флюида или жидкости в контейнере. Контейнеры вращаются в соответствии с профилем вращения для: А) повторного взбалтывания жидкости в случае суспензионных жидкостей; В) встряхивания возможных частиц в жидкости; С) приведения жидкости и возможных частиц во вращение в контейнере для облегчения обнаружения; D) встряхивания возможных пузырьков воздуха в контейнере, чтобы их нельзя было принять за частицы. Присутствие пузырьков воздуха в жидкости может быть допустимо, но, с точки зрения обнаружения частиц,они крайне нежелательны, поскольку их можно легко ошибочно принять за частицы, что повышает частоту ложной выбраковки. Пузырьки воздуха могут присутствовать во флюиде или жидкости после заполнения контейнера. Эти пузырьки воздуха можно освобождать или удалять, например, с внутренней стенки контейнера до осуществления контроля путем вращения контейнера. Наличие пузырьков воздуха может интерпретироваться устройством контроля, осуществляющим визуальный контроль, как дефекты, нарушения или постороннее вещество. Считается, что частота наличия пузырьков воздуха увеличивается при размещении устройства контроля, например, на одной линии с заполняющим устройством. Решение о том, останавливать ли и когда останавливать вращение контейнеров, может опираться на предположение о вероятности того, что дефекты или нарушения в контейнере скрыты от камеры в отсутствие вращения контейнера. Согласно альтернативному варианту осуществления настоящего изобретения, источник света и камера могут располагаться по одну сторону от пути перемещения. Источник света согласно любому из вариантов осуществления настоящего изобретения может располагаться выше или ниже относительно устройства или устройств камеры. Предпочтительно, источник света непосредственно освещает по меньшей мере один контейнер. Альтернативно, свет можно направлять от источника света к контейнеру с использованием призм, и/или фильтров, и/или зеркал, и/или волноводов. Источник света может располагаться на возвышении относительно контейнера, что позволяет источнику света, например, освещать контейнер под углом, отличным от 90 к оси вращения или продольной оси контейнера. Кроме того, свет, излучаемый источником света, может проходить через фильтры,например поляризационные фильтры с линейной, круговой или иной поляризацией, цветные фильтры или другие фильтры, до или после освещения контейнера. Считается, что разные положения источника света относительно контейнера обеспечивают преимущество при обнаружении различных видов объектов или дефектов, например волокон или нарушений в материале, из которого изготовлен контейнер. Камера может включать в себя светочувствительное устройство любого вида для записи цифрового изображения; согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, применяется микросхема КМОП, в частности датчик изображения на основе матрицы КМОП. Согласно указанному устройство должно быть чувствительно по меньшей мере к части спектра излучения для электромагнитного излучения, вырабатываемого источником света. Камера может быть образована любым устройством, способным преобразовывать свет с определенным спектральным распределением в цифровые изображения в двух измерениях. В частности, электромагнитное излучение может быть поляризованным, например, линейно поляризованным, поляризованным по кругу, горизонтально или вертикально поляризованным или поляризованным в любом смешанном режиме. Кроме того, перед или на камере или источнике света можно устанавливать фильтры. Устройство камеры может записывать последовательность изображений по мере продвижения конкретного контейнера вдоль пути. Последовательность изображений, или часть изображений, может затем поступать на блок обработки изображений, например персональный компьютер, специализированный компьютер или рабочую станцию. Кроме того, блок обработки изображений может быть встроен в камеру, в результате чего информация, выдаваемая камерой, может указывать, обнаружен ли объект или дефект в конкретном контейнере.-2 012468 Вращение контейнера также позволяет контролировать, например, замороженное обезвоженное вещество, не пропускающее свет, с учетом того, что визуальный контроль поверхности, образованной замороженным или замороженным обезвоженным веществом в контейнере, возможно благодаря вращению контейнера. Предполагается возможным обнаруживать и отличать линии разлома в замороженном или замороженном обезвоженном веществе от дефектов и/или объектов. Лекарства или медикаменты иногда производят, доставляют, и/или хранят в твердом виде, например в форме порошка, в замороженном обезвоженном состоянии или в виде гранулированного материала. Эмульсия может включать в себя один или несколько шариков масла, и эти шарики масла можно регистрировать и не классифицировать как нежелательные объекты или дефекты. Передаваемые изображения могут представлять собой полное изображение, записанное камерой,однако, эта передача цифровой информации может превышать ограничения оборудования, используемого для передачи и приема изображений, например, через шину PCI, шину cPCI, шину PCI-X, PCIэкспересс и т.п. Поэтому, согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, вместо полного изображения передается только субизображение или часть изображения. Это ограничивает объем данных, передаваемых с камеры или устройства, подключенного к камере, на блок обработки изображений. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, выбранная часть изображения имеет прямоугольную или квадратную форму. Можно предусмотреть субизображения, формы которых отличаются от прямоугольной или квадартной, например субизображения, точно сооответствующие контуру контейнера. Кроме того, можно использовать динамические контуры, автоматически регистрируя контур конкретного контейнера. Варианты осуществления, согласно которым переносимые или передаваемые изображения являются дифференциальными изображениями, т.е. передаваемое изображение получено вычитанием фактически записанного изображения и, например, предыдущего изображения, также считаются частью настоящего изобретения. Передача изображения предпочтительно является передачей без потерь. Предпочтительно, все светочувствительное устройство, т.е. микросхема КМОП, освещается и квантуется/цифруется для создания изображения, имеющего как можно более высокое разрешение. Чем выше разрешение, тем более детальный контроль можно производить. Камера может записывать изображения в цвете, например RGB, но по сравнению с записью изображений в градации серого или в черно-белом режиме, цветные изображения включают в себя больше данных для представления цветов. Предпочтительно записывать черно-белые или серые изображения. Блок обработки изображений, который, согласно вышеуказанному, предпочтительно, является компьютером, например персональным компьютером, рабочей станцией, специализированным компьютером или блоком, встроенным в устройство камеры, принимает данные, представляющие цифровые изображения, либо непосредственно от камер, либо через устройство, подключенное к камере или встроенное в нее, которое управляет выбором субизображения. Субизображением нужно управлять, поскольку контейнер перемещается в поле зрения камеры. Предпочтительно контейнер перемещается, по существу, по горизонтальной оси перед камерой. Контейнер с большой вероятностью занимает только часть изображения, и поэтому субизображение нужно выбирать для получения ряда полезных субизображений, подлежащих обработке. Положением субизображения можно управлять различными способами. Субизображениями можно управлять посредством внешнего контроллера, регистрирующего положение контролируемого контейнера. После этого внешний контроллер может посылать команды камере, записывающей изображения, что субизображение нужно переместить или сдвинуть. Согласно первому преимуществу настоящего изобретения обработку может осуществлять блок цифровой обработки изображений, сравнивающий по меньшей мере две части двух конкретных цифровых изображений для обнаружения нежелательных объектов или дефектов в конкретном контейнере. Сравнение двух субизображений или частей изображения позволяет блоку обработки изображений определять, существуют ли какие-либо несоответствия между двумя изображениями. Затем эти возможные несоответствия можно интерпретировать как дефекты в контейнере или эффекты нежелательных объектов, а именно, постороннего вещества, грязи, частиц или других предметов. Согласно принципам настоящего изобретения второе преимущество связано с блоком цифровой обработки изображений, анализирующим по меньшей мере одно цифровое изображение для обнаружения нежелательных объектов или дефектов в конкретном контейнере. Блок анализа изображений может анализировать по меньшей мере одно изображение в последовательности изображений, или его субизображение, анализируя один или группу пикселей в цифровом изображении или части цифрового изображения для определения, присутствует ли дефект или объект. Пиксели - это термин, используемый для описания отдельных компонентов, составляющих цифровое изображение. Методы, связанные с такого рода анализом цифровых изображений, описаны в других публикациях. Третье преимущество настоящего изобретения связано с обработкой, осуществляемой путем вычитания двух изображений или субизображений в последовательности или вне последовательности. Вычи-3 012468 тание двух изображений дает изображение, показывающее различие между двумя изображениями. Затем различия можно интерпретировать как нежелательные объекты или дефекты, альтернативно, просто как ошибки при записи изображений. Четвертое преимущество настоящего изобретения связано с обработкой, осуществляемой путем сравнения части конкретного цифрового изображения с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере. Опорное изображение может быть образовано изображением или частью изображения путем вычисления среднего для набора или последовательности изображений или частей изображений. Альтернативно, опорное изображение может быть предварительно записано и сохранено. Опорное изображение должно представлять собой изображение контейнера без ошибок или дефектов и без нежелательных объектов или постороннего вещества. Согласно второму признаку настоящего изобретения, контейнеры можно транспортировать, по существу, с постоянной скоростью вдоль пути перемещения. Это означает, что транспортер, переносящий контейнеры, поддерживает, по существу, постоянную скорость в ходе работы устройства контроля. При включении или выключении устройства, транспортер ускоряется для достижения требуемой скорости. Альтернативно, транспортер может совершать дискретные перемещения. Согласно принципам настоящего изобретения способ, отвечающий первому аспекту, может дополнительно содержать этапы, на которых обеспечивают вторую камеру, включающая в себя вторую микросхему КМОП для регистрации света с определенным спектральным распределением, излучаемого вторым источником света, причем между вторым источником света и второй камерой задана вторая линия визирования, путь перемещения пересекает вторую линию визирования, вторая микросхема КМОП создает цифровое изображение, содержащее второе определенное количество пикселей,вторая камера регистрирует вторую последовательность кадров, образующую второе множество цифровых изображений, при прохождении контейнера между вторым источником света и второй камерой,выбирают вторую часть каждого из цифровых изображений второй последовательности, причем вторая часть, по существу, соответствует контуру конкретного контейнера,передают каждую из вторых частей на блок цифровой обработки изображений,причем блок цифровой обработки изображений обрабатывает части второго множества цифровых изображений для обнаружения нежелательных объектов или дефектов в конкретном контейнере,сравнивают результат второй обработки с первой обработкой для подтверждения результата первой обработки. Способ также может включать в себя любые другие признаки или преимущества, упомянутые в этом описании. Обеспечение второй камеры для устройства контроля позволяет осуществлять процесс, в котором возможен двойной контроль. Оказывается, вторая камера повышает процент верных идентификаций контейнеров, имеющих дефекты или содержащих постороннее вещество, грязь и т.п. Изображения от второй камеры можно обрабатывать аналогично изображениям от первой камеры. Две камеры можно приспособить для осуществления однотипного контроля контейнеров, т.е. для выявления одного и того же вида дефектов или нарушений, например дефектов или нарушений в материале или объекта, присутствующего в контейнере или в материале, образующем контейнер, или на поверхности контейнера. Кроме того, можно обеспечить две дополнительные камеры, так что полная установка включает в себя четыре камеры, где камеры попарно осуществляют контроль для обнаружения сходных дефектов или ошибок, например две камеры могут контролировать контейнеры на предмет посторонних объектов, а две другие камеры могут осуществлять контроль для обнаружения дефектов в контейнере. Согласно описанному в другом месте положение источника света может оказывать влияние на тип осуществляемого контроля, и в вышеописанной конфигурации четырех камер два источника света могут быть обеспечены для одного типа контроля и два другие источника света могут быть обеспечены для осуществления других типов контроля. Альтернативно, можно установить три камеры для осуществления идентичного или однотипного контроля, тогда как четвертая осуществляет другой тип контроля. Альтернативно, все четыре камеры можно использовать для осуществления однотипного контроля. При использовании двух камер для осуществления однотипного контроля две другие камеры позволяют подтверждать или проверять результат первого контроля. Согласно описанному в другом месте контейнеры можно вращать в соответствии с определенным профилем вращения, где обеспечение двух камер можно использовать в профиле, включающем в себя вращение, остановку, контроль, затем снова вращение, остановку и контроль каждого контейнера. Этапы или состояния вращения могут включать в себя вращения в одном или обоих направлениях, т.е. по часовой стрелке и против часовой стрелки или их комбинации и могут включать в себя вращения с разными скоростями. Согласно одному варианту осуществления настоящего изобретения контейнер совершает один обо-4 012468 рот, т.е. 360, при котором несколько изображений, например 4-14, например 6-12, предпочтительно 8-10 изображений, записываются для внешнего контроля контейнера. Предпочтительно записывать и анализировать более трех изображений, чтобы гарантировать, что вся поверхность контейнера покрыта изображениями. Согласно альтернативным вариантам осуществления, можно записывать другие количества изображений. Можно использовать полное изображение, а также только часть каждого изображения. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения,две камеры или два блока получения сигнала и обработки сигнала могут быть, по существу, идентичны. Однако возможны варианты осуществления настоящего изобретения, где две камеры или два блока получения сигнала и обработки сигнала не идентичны. Например, камеры могут быть чувствительны к разным длинам волны, что позволяет использовать их для контроля с целью выявления предметов, объектов, грязи и т.п., не наблюдаемых камерой на одной длине волны, но регистрируются второй камерой на другой длине волны. Кроме того, можно предусмотреть варианты осуществления, включающие в себя более двух камер. Первая задача настоящего изобретения связана с обработкой первого множества цифровых изображений, приводящей к установлению наличия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению наличия объекта или дефекта, конкретный контейнер подлежит выбраковке. Если обработка изображений для изображений от двух или более камер приводит к обнаружению постороннего вещества или дефектов, контейнер может быть забракован, выброшен или отклонен. Вторая задача настоящего изобретения связана с обработкой первого множества цифровых изображений, приводящей к установлению отсутствия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению наличия объекта или дефекта, конкретный контейнер подлежит повторному анализу. Третья задача настоящего изобретения связана с обработкой первого множества цифровых изображений, приводящей к установлению наличия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению отсутствия объекта или дефекта, конкретный контейнер подлежит повторному анализу. Если обработка изображений для изображений от двух или более камер не приводит к одному и тому же исходу или обнаружению наличия дефектов или объектов в контейнере, контейнер может быть возвращен в устройство контроля, что позволяет сократить количество ложных выбраковок, т.е. контейнеров, которые при контроле были ошибочно идентифицированы как контейнеры, имеющие дефект или нежелательный объект. Кроме того, установление отсутствия дефектов или нежелательных объектов в контейнере можно сделать более безопасным, тем самым сократив количество ложных приемок. Четвертая задача настоящего изобретения связана с обработкой первого множества цифровых изображений,приводящей к установлению отсутствия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению отсутствия объекта или дефекта в конкретном контейнере, он пропускается для дальнейшей обработки. Дальнейшая обработка может состоять в упаковке, дополнительной очистке и т.п. Согласно второму аспекту настоящего изобретения предусмотрен способ обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих флюид или жидкость. Способ,отвечающий второму аспекту настоящего изобретения, может содержать этапы, на которых обеспечивают путь перемещения, вдоль которого транспортируется совокупность контейнеров,перемещают совокупность контейнеров вдоль пути перемещения,обеспечивают первый источник света, излучающий свет с определенным спектральным распределением, причем источник света располагается по одну сторону пути перемещения, контейнеры, по меньшей мере, частично прозрачны или полупрозрачны для света с определенным спектральным распределением, флюид или жидкость, по меньшей мере, частично прозрачна или полупрозрачна для света с определенным спектральным распределением,обеспечивают второй источник света, излучающий свет с определенным спектральным распределением, причем второй источник света располагается по одну сторону пути перемещения,обеспечивают первое устройство регистрации света для регистрации света с определенным спектральным распределением, излучаемого первым источником света, причем первое устройство регистрации света задает первое поле зрения, путь перемещения пересекает первое поле зрения, первое устройство регистрации света создает первое цифровое изображение, содержащее определенное количество пикселей,обеспечивают второе устройство регистрации света для регистрации света с конкретным спектральным распределением, излучаемого вторым источником света, причем второе устройство регистрации света задает второе поле зрения, путь перемещения пересекает второе поле зрения, второе устройство регистрации света создает второе цифровое изображение, содержащее второе конкретное количество пикселей,первое и второе устройства регистрации света регистрируют первую и вторую последовательности цифровых изображений при прохождении контейнера через первое и второе поле зрения, соответствен-5 012468 но,выбирают часть каждого из цифровых изображений первой и второй последовательностей, причем часть, по существу, соответствует контуру конкретного контейнера,передают каждую из частей на блок цифровой обработки изображений,причем блок цифровой обработки изображений обрабатывает каждое цифровое изображение для обнаружения нежелательных объектов или дефектов в конкретном контейнере,причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. Согласно одному варианту осуществления настоящего изобретения первое устройство регистрации света расположено напротив первого источника света, вследствие чего первый источник света находится в первом поле зрения и/или второе устройство регистрации света расположено напротив второго источника света, вследствие чего второй источник света находится во втором поле зрения. Устройства регистрации света могут представлять собой любое устройство, способное к преобразованию излучения с определенным спектральным распределением в сигнал, например цифровой сигнал или аналоговый сигнал. Конкретное преимущество настоящего изобретения состоит в том, что первый и второй блоки регистрации света, согласно способу, отвечающему второму аспекту настоящего изобретения, могут представлять собой камеры, каждая из которых включает в себя по меньшей мере одну микросхему КМОП,создающие первое и второе цифровые изображения. Альтернативно, первая и вторая камеры могут включать в себя любой блок или микросхему, способный(ую) к преобразованию излучения с определенным спектральным распределением в цифровые изображения в двух измерениях. Способ, отвечающий второму аспекту настоящего изобретения, может содержать любые из объектов, признаков и/или преимуществ, упомянутых в связи с первым аспектом настоящего изобретения. Согласно третьему аспекту настоящего изобретения, предусмотрено устройство для обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих флюид или жидкость,устройство содержит раму,транспортер, установленный на раме, образующий путь перемещения совокупности контейнеров,причем транспортер задает вход и соответствующий выход, причем вход принимает совокупность контейнеров, выход выводит совокупность контейнеров,первый источник света, излучающий свет с определенным спектральным распределением, установленный на раме, причем первый источник света располагается по одну сторону пути перемещения, контейнеры, по меньшей мере, частично прозрачны или полупрозрачны для света с определенным спектральным распределением, флюид или жидкость, по меньшей мере, частично прозрачна или полупрозрачна для света с определенным спектральным распределением,первую камеру, включающую в себя первую микросхему КМОП для регистрации света с определенным спектральным распределением, излучаемого первым источником света, причем первая камера задает первое поле зрения, первая камера установлена на раме напротив первого источника света, вследствие чего первый источник света находится в первом поле зрения, путь перемещения пересекает первое поле зрения, первая микросхема КМОП создает первое цифровое изображение, содержащее первое определенное количество пикселей, первая камера регистрирует первую последовательность цифровых изображений при прохождении конкретного контейнера через первое поле зрения,первый блок цифровой обработки изображений, электрически связанный с первой камерой,причем камера выбирает часть каждого из цифровых изображений, по существу, соответствующую контуру конкретного контейнера, и передает часть на блок цифровой обработки изображений,причем блок цифровой обработки изображений обрабатывает последовательность частей цифровых изображений для обнаружения нежелательных объектов или дефектов в конкретном контейнере,причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. Под камерой, делающей выбор, следует понимать электронное устройство, встроенное в камеру или присоединенное к ней, которое выбирает часть изображения, записанного камерой. Эта выбранная часть изображения, записанная камерой, поступает на блок обработки изображений, например компьютер, рабочую станцию, специализированное устройство анализа изображений, встроенный компьютер или устройство обработки изображений в камере. Под электрическими соединениями в данном контексте следует понимать общий термин, охватывающий все виды соединений, позволяющих передавать данные, например проводные соединения, беспроводные соединения, волоконно-оптические соединения или их комбинации. Согласно третьему признаку настоящего изобретения транспортер можно рассматривать как транспортер, выбранный из группы, содержащей, по меньшей мере, вращающиеся карусели, ленточные транспортеры и цепные транспортеры. Можно использовать и другие транспортеры, например транспортеры, снабженные держателями типа присоски. Материал, используемый для формирования транспортера, может представлять собой пластмассовый или металлический материал, например нержавеющую-6 012468 сталь и т.п. Конкретный транспортер может быть приспособлен для приема бутыли или контейнера, задающего размер с интервалом, т.е. без ограничения способности карусели принимать контейнеры только одного конкретного размера. Четвертый признак настоящего изобретения связан с транспортером, приводимым в движение непосредственно серводвигателем, шаговым двигателем или линейны двигателем, альтернативно, можно использовать редукторное средство. Двигатель, предпочтительно, относится к разновидности, обеспечивающей постоянный крутящий момент, вследствие чего, работа транспортера может быть, по существу,постоянной. Согласно третьей задаче настоящего изобретения, каждый контейнер может вращаться в направлении либо по часовой стрелке, либо против часовой стрелки, средством вращения для приведения в движение флюида, содержащегося в каждом из контейнеров. Средство вращения может быть образовано электродвигателем и т.п. Предпочтительно, средство вращения должно быть способно вращать контейнер с достаточно высокой скоростью, чтобы можно было взбалтывать объекты или постороннее вещество внутри каждого из контейнеров и обнаруживать их во флюиде или жидкости. Пятый признак настоящего изобретения связан с устройством контроля, дополнительно содержащим: второй источник света, излучающий свет с определенным спектральным распределением, установленный на раме, причем второй источник света располагается по одну сторону пути перемещения,вторую камеру, включающую в себя вторую микросхему КМОП для регистрации света с определенным спектральным распределением, излучаемого вторым источником света, причем вторая камера задает второе поле зрения, путь перемещения пересекает второе поле зрения, вторая микросхема КМОП создает второе цифровое изображение, содержащее второе определенное количество пикселей, вторая камера регистрирует вторую последовательность цифровых изображений при прохождении конкретного контейнера через второе поле зрения. Благодаря обеспечению второго источника света и второй камеры можно осуществлять дистанционную проверку контроля, осуществляемого первой камерой. Между двумя операциями контроля, контейнер можно снова вращать, чтобы гарантировать, что жидкость или флюид находится в движении во время осуществления второго контроля. Альтернативно, контроль можно осуществить спустя достаточно непродолжительное время после первого контроля, чтобы можно было считать, что флюид или жидкость находится в движении с приблизительно той же скоростью. В действительности жидкость или флюид может замедлиться настолько, что потребуется второе вращение контейнера. Это, однако, зависит от вязкости флюида или жидкости. В общем случае вторая камера или устройство регистрации позволяет проверять контроль первой камеры. Поскольку возможны ошибки контроля, проверка первого контроля позволяет частично исключить возможность ошибки. Шестой признак настоящего изобретения связан с устройством контроля, дополнительно содержащим: вторую камеру, включающую в себя вторую микросхему КМОП для регистрации света с определенным спектральным распределением, излучаемого первым источником света, причем вторая камера задает второе поле зрения, вторая микросхема КМОП создает второе цифровое изображение, содержащее второе определенное количество пикселей, вторая камера регистрирует вторую последовательность цифровых изображений при прохождении конкретного контейнера через второе поле зрения. Вторая камера может быть обеспечена и размещена вблизи первой камеры и направлена на первый источник света, в результате чего вторая камера осуществляет свой контроль на том же конкретном контейнере, что и первая камера в, по существу, тот же период времени. Источник света также может задавать область, позволяющую по-разному направлять две камеры, но все же на первый источник света,контролируя разные контейнеры в один и тот же момент времени. Седьмой признак настоящего изобретения связан со второй камерой, электрически связанной с первым блоком цифровой обработки изображений. Альтернативно, устройство может дополнительно содержать второй блок цифровой обработки изображений, и вторая камера может быть электрически связана со вторым блоком цифровой обработки изображений, и часть каждого из вторых цифровых изображений, по существу, соответствующая контуру конкретного контейнера, поступает на блок цифровой обработки изображений, первый или второй блок цифровой обработки изображений, обрабатывающие вторую последовательность цифровых изображений, для обнаружения нежелательных объектов или дефектов в конкретном контейнере, причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. Выбор количества блоков обработки изображений зависит от мощности обработки данных, т.е. от того, сколько команд за единицу времени может выполнить блок обработки изображений, по сравнению с фактическим объемом обработки, необходимым в данный период времени до принятия решения. Это отчасти зависит от количества пикселей в конкретном изображении или части изображения, подлежащих обработке, и от алгоритма, выбранного для осуществления анализа изображения. Конкретной задачей настоящего изобретения является обеспечение средства для перемещения кон-7 012468 кретного контейнера от выхода к входу. При условии, что контроль двух или более камер привел к разным результатам, контейнер может быть возвращен для повторного контроля с помощью камер. Таким образом, можно сократить количество ложных выбраковок и, следовательно, снизить затраты денег и материала. Согласно восьмому признаку настоящего изобретения, путь перемещения может задавать вход и соответствующий выход, причем вход принимает совокупность контейнеров, выход выводит совокупность контейнеров, возвратный транспортер переносит конкретные контейнеры от выхода к входу. Возвратный транспортер может представлять собой вращающуюся карусель, ленточный транспортер, цепной транспортер, колесо или любые их комбинации. Контейнеры могут вводиться в транспортер в любой точке и извлекаться или выводиться в любой точке. Одним примером этого является вариант осуществления, где транспортер переносит контейнеры по кругу и контроль осуществляется в одном или нескольких местах. После того как контроль определил отсутствие объектов или дефектов либо наличие объектов или дефектов в конкретном контейнере, контейнер может быть удален с транспортера. Согласно варианту осуществления, где осуществляется две операции контроля, когда две операции контроля приводят к разным результатам или решениям, контейнер может просто остаться на транспортере для повторного контроля. Две станции могут удалять и вставлять контейнеры. Вставка может ограничиваться положениями, где существует доступный держатель или место. Изобретение будет дополнительно описано со ссылкой на прилагаемые чертежи, на которых фиг. 1 - схематический вид сверху устройства контроля, отвечающего настоящему изобретению; фиг. 1 а - схематический вид сверху части устройства, показанного на фиг. 1; фиг. 2 - схематический частичный вид карусели устройства, показанного на фиг. 1; фиг. 3 - схематический частичный вид устройства, показанного на фиг. 1; фиг. 4 - схематический вид кольцевого контакта и контроллера; фиг. 5 - схематический детальный вид держателя карусели в устройстве контроля; фиг. 6 - схематический вид возвратной системы; фиг. 7 - блок-схема устройства контроля; фиг. 8 - схематическая иллюстрация карусели контроля; фиг. 9 а-9 с - схематические виды, иллюстрирующие выбор субизображений; фиг. 10 - схематический сквозной вид карусели устройства контроля, имеющей альтернативную конфигурацию камеры; фиг. 11 - схематический сквозной вид устройства контроля, имеющего альтернативную конфигурацию камер и источников света; фиг. 12 - схематический вид сверху устройства контроля, имеющего камеру для контроля контейнеров; На фиг. 1 схематически изображено устройство 10 контроля. Устройство 10 контроля визуально контролирует контейнеры 16 для обнаружения дефектов в материале, используемом для формирования отдельного контейнера 16, и контролирует контейнеры 16 для определения, присутствуют ли какие-либо нежелательные объекты или постороннее вещество в контейнерах 16. Поскольку устройство 10 контроля основано на визуальном контроле, устройство может также регистрировать любые объекты или постороннее вещество, которое может присутствовать на внешних поверхностях контейнеров 16. Контейнеры 16 загружаются из хранилища или системы 18 подачи с помощью винта 20, имеющего дорожку 22, по существу соответствующую диаметру отдельного контейнера 16. Контейнеры 16 поступают из дорожки 22 на первое колесо 24. Первое колесо 24 содержит удерживающие механизмы, например, всасывающие устройства или захватывающие устройства. Контейнеры 16 переносятся с первого колеса 24 на второе колесо 26, предпочтительно имеющее ту же общую структуру, что и первое колесо 24. Второе колесо вращается в противоположном направлении относительно первого колеса 24. Второе колесо 26 доставляет отдельные контейнеры 16 в точку сброса 28, где отдельные контейнеры 16 поступают в карусель 12, содержащую совокупность держателей, совокупно обозначаемых позицией 14. Все держатели в карусели 12 одинаковы и потому обозначаются одной и той же позицией. Отдельные держатели 14 содержат двигатель для вращения контейнеров, 16 принятых в держатель 14. Держатель 14 может вращать контейнеры 16 в направлении либо по часовой стрелке, либо против часовой стрелки вокруг оси, предпочтительно продольной оси контейнера 16. Конкретный профиль вращения может обеспечиваться для вращения контейнеров с конкретными скоростями вращения, включающий в себя направления по часовой стрелке и/или против часовой стрелки. Контейнеры 16 вращаются для повторного взбалтывания флюида и/или материала, находящегося в флюиде в контейнере 16. В центре карусели 12 могут располагаться одна или несколько камер для осуществления визуального контроля отдельных контейнеров 16. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, в центре карусели 12 находятся две камеры 36 и 38. Камеры 36, 38 задают угол между ними. Угол между камерами, т.е. между полями зрения, заданными камерами 36, 38, согласно предпочтительному в настоящее время варианту осуществления настоящего-8 012468 изобретения, составляет 20-60. Углы между камерами могут отличаться от вышеописанных, поскольку камеры, согласно одному варианту осуществления, могут располагаться вдоль оси вращения карусели 12, причем поле зрения указывает на дно карусели 12, где может располагаться отражатель, например зеркало, чтобы камера могла контролировать контейнер 16. Угол между полями зрения камер может составлять от 0 до 180. Размещение камер в такой конфигурации может быть необходимо для одновременного размещения двух камер в карусели. Кроме того, эта конфигурация позволяет одновременно размещать больше камер, например,четыре камеры, в карусели 12. При этом камеры защищены в карусели от внешних влияний, например,людей, ударяющих по камерам и, таким образом, способных передвигать или смещать или поворачивать камеры, чтобы камеры не контролировали надлежащий или правильный контейнер 16. Варианты осуществления с одной камерой могут иметь камеру, размещенную где угодно в карусели или вне карусели. Варианты осуществления с двумя или более камерами могут иметь камеры в положениях, отличных от центра карусели, например, две камеры, расположенные одна над другой, контролирующие либо один и тот же контейнер или бутыль одновременно, либо два или более разных контейнеров одновременно. Согласно другим вариантам осуществления, камеры могут располагаться не в центре карусели, например, как описано выше в отношении камер, расположенных вдоль оси вращения карусели 12, камеры располагаются вне оси вращения карусели и потому не точно в центре карусели. Согласно альтернативному варианту осуществления настоящего изобретения, камеры 36, 38 могут располагаться одна над другой, направленные в, по существу, одинаковом направлении, так что две камеры одновременно контролируют один и тот же конкретный контейнер 16 или две разные части конкретного контейнера, например, в случае, когда контейнеры слишком велики, чтобы их можно было контролировать одной камерой. Преимущество наличия двух камер состоит в том, что вторую камеру можно использовать для проверки контроля, произведенного первой камерой. Если первая камера определила, что объекты или дефекты отсутствуют в конкретном контейнере, вторая камера должна придти к тому же решению, однако,если первая камера пропустила объект или дефект в контейнере 16, и если вторая камера идентифицирует этот объект или дефект, контейнер может быть возвращен и повторно проанализировать для безопасного установления, присутствует ли объект или дефект в контейнере 16. Анализ изображений от первой и второй камеры должен приводить к одному и тому же заключению для обоих наборов изображений, чтобы либо забраковать контейнер 16, либо направить его на дальнейшую обработку. Если процесс анализа изображения, осуществляемый над изображениями со стороны либо первой, либо второй камеры, приводит к установлению наличия объекта или дефекта, альтернативно, отсутствия объекта или дефекта, отличается от результата, полученного в результате обработки изображения, осуществляемой над изображениями со стороны другой камеры, контейнер 16 возвращается для повторного анализа с помощью двух камер. Этот процесс возврата призван сокращать количество ложных выбраковок, т.е. случаев, когда контейнер выбраковывается, хотя контейнер должен быть пропущен, а также призван сокращать количество случаев, когда контейнер пропускается, хотя контейнер должен быть забракован, т.е. ложных приемок. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения,реализован описанный ниже алгоритм обработки цифровых изображений или частей цифровых изображений. Все, что вызывает некоторый контраст с малой исследуемой областью (AOI), называется частью частицы или аномалии, за исключением того, если она остается (примерно) в одном и том же положении на всех изображениях последовательности (статические аномалии, например грязь на поверхности контейнера). Некоторый контраст означает, что различие между самым ярким и самым темным пикселями превышает некоторый порог. Объекты данных:IMPROTO: изображение прототипа, используемое в качестве опорного для размещения выравнивания AOI изображений в последовательности изображений;AOILINLOC: исследуемая область для локатора, который отвечает за выравнивание;AOIPI: исследуемая область, задающая активную область для контроля частиц;IMSRC[N]: записанная последовательность изображений - набор изображений в градации серогоIMSRCFIL[N]: улучшенные исходные изображения IMSRC[N] (сокращение ошибок, вносимых микросхемой КМОП камеры);IMSRCMEAN[N]: изображения, полученные низкочастотной фильтрацией IMSRCFIL[N];IMDIFF[N]: набор разностных изображений IMSRCMEAN[N] - IMSRCFIL [N] ("локально контрастных" изображений);IMBINRAW[N]: набор двоичных изображений, полученных путем сравнения с порогом изображений IMDIFF[i] (два порога задают интервал); значение пикселя IMBINRAW[i][у][х] == 0: нет аномалии;IMACCU: вспомогательное изображение для генерации изображения IMMASKSTATICS; Значение пикселя 0 указывает, что аномалия не обнаружена; Значение пикселя 1 указывает, что в этом месте (вблизи) однажды обнаружена аномалия; Значение пикселя N указывает, что в этом месте были обнаружены только аномалии;IMMASKSTATICS: изображение, которые используются для "игнорирования" некоторых мест в изображении, где система способна обнаруживать статические аномалии; Значение пикселя 0 указывает: в этом месте, скорее всего, находится статическая аномалия; Значение пикселя 1 указывает: в этом месте, скорее всего, нет статической аномалии;OBJSET[N]: набор наборов объектов. Для каждого изображения создается набор объектов. Для каждого объекта в наборе (за исключением статических аномалий) производится определение, можно ли считать его частицей.INSPECTIONRESULT: конечный результат контроля вычисляется на основании информации в наборе объектов OBJSET[N]. Параметры: Общая классификация стратегии: По умолчанию для системы предполагается, что контейнер представляет собой NOGO. Если можно осуществлять все этапы контроля, следующие правила будут применяться для вычисления, удовлетворяет ли контейнер все требования для классификации как GO: один конкретный объект в наборе объектов классифицируется как частица, если его площадь превышает определенный порог areathresh; одно конкретное изображение в последовательности изображений классифицируется как GO, если количество обнаруженных частиц в затронутом наборе объектов меньше или равно определенному порогу maxno ofparticlesperimage; контролируемый контейнер классифицируется как GO, если все изображения в последовательности изображений классифицируются как GO. Основные этапы обработки:- 11012468 2) Этап обработки 2 для каждого изображения в последовательности изображений В данном случае камеры 36 и 38 ориентированы к соответствующему источнику света, а именно источникам света, обозначенным позициями 40 и 42 соответственно. Источники света 40 и 42 испускают электромагнитное излучение, по существу, в диапазоне частот, воспринимаемом камерами 36 и 38. Источники света 40 и 42 предпочтительно охватывают часть поля зрения камеры, в котором контейнер 16 наблюдается камерой. Источники света 40 и 42 предпочтительно в целом однородны, в том смысле, что свет распределяется, по существу, однородно в поле зрения соответствующей камеры и может обеспечивать непрерывный или пульсирующий свет. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения свет пульсирует или мигает с частотой 100 Гц, и мигающий или пульсирующий свет синхронизируется с камерой, так что камера записывает изображения с частотой 100 Гц, которая соответствует частоте пульсации света. В других вариантах осуществления можно использовать частоты, отличные от 100 Гц. Электромагнитное излучение, излучаемое источниками 40 и 42 света, предпочтительно находится в видимом спектре, но может также содержать излучение в ультрафиолетовом и инфракрасном спектре. Выбор длины волны света, излучаемого источниками 40 и 42 света, зависит от природы материала, используемого для формирования контейнеров 16, поскольку некоторые материалы не являются прозрачными или полупрозрачными для света, излучаемого в ультрафиолетовом спектре, инфракрасном спектре или в ближнем инфракрасном спектре. Держатели 14 будут описаны более подробно ниже со ссылкой на фиг. 5. После того как контейнер 16 инспектирован и контейнер 16 признан хорошим или плохим, контейнер поступает на третье колесо 46, аналогичное колесам 24 и 26. После этого контейнер поступает на транспортер 48, переносящий контейнер в приемную секцию, начинающуюся с колеса 50. Альтернативно, транспортер 48 можно использовать для возврата конкретного контейнера 16, подлежащего повторной проверке, т.е. контейнера 16, для которого по меньшей мере два процесса анализа изображения привели к разным результатам. Если требуется более высокая степень определенности правильного обнаружения или, если нужно отдельно контролировать или обнаруживать другую область, можно использовать больше камер. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения,для возврата контейнеров в устройство контроля используется конкретное устройство, например механический переключатель или выталкиватель, предпочтительно используется колесо или лента с зажимами. Можно задать максимальное количество возвратов конкретного контейнера в устройство контроля. Это предотвратит заполнение устройства контейнерами, когда устройство контроля не способно получить два или более решения о присутствии или отсутствии объектов или дефектов в конкретном контейнере. Когда конкретный контейнер подлежит возврату в устройство контроля, система подачи должна получить команду остановить подачу новых контейнеров в устройство контроля, чтобы можно было проконтролировать контейнер, подлежащий повторному контролю.- 12012468 Контейнер 16 переносится транспортером 52 через ряд станций сброса, которые в совокупности обозначены позицией 54. На фиг. 1 показаны три станции сброса, из которых одна может принимать контейнеры, идентифицированные как содержащие нежелательные объекты или материал, альтернативно, имеющие дефекты в материале, используемом для формирования контейнеров, а другие имеют другое предназначение, например, сохранение до упаковки, альтернативно, непосредственно в упаковки. Работой устройства контроля может управлять внешнее вычислительное устройство 56 (компьютер). Компьютер 56 может включать в себя устройства ввода, например клавиатуры, указательные устройства, один или несколько сенсорных экранов, кнопок и т.п. или любые их комбинации. Компьютер 56 может включать в себя информацию, относящуюся к контролируемому продукту, и собирать информацию, касающуюся работы устройства контроля, например, статистику контроля, включая количество проконтролированных контейнеров, количество выбраковок и т.п. Кроме того, вычислительное устройство 56 может отображать изображения, полученные камерами 36 и/или 38. На фиг. 1 а показан схематический вид сверху части устройства 10 контроля, показанного на фиг. 1. Контейнеры транспортируются от хранилища контейнеров или системы 18 подачи через червяк или винт 20 на первое колесо 24, вращающееся в направлении стрелки R1. Когда контейнер 16 переносится в точку, где колесо 24 контактирует с колесом 26, вращающимся в направлении стрелки R2, контейнер 16 поступает на колесо 26. Колесо 26 вращается и доставляет контейнер 16 на карусель 12. Карусель 12 вращается в направлении стрелки R3, перенося контейнер 16 в поле зрения первой камеры 36 и затем в поле зрения второй камеры 38. Вдоль пути перемещения карусели 12 контейнер 16 может вращаться или крутиться в одном или обоих направлениях, т.е. по часовой стрелке иди против часовой стрелки, с переменной или постоянной скоростью, альтернативно, меняя направления. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения,контейнеры вращаются со скоростью максимум 10000 об/мин в зависимости от содержимого контейнера. Если контейнер заполнен флюидом типа суспензии, контейнер вращают со скоростью 5-7000 об/мин,тогда как частично заполненный контейнер вращают со скоростью около 1000 об/мин, чтобы не создавать пузырьки воздуха во флюиде или жидкости в контейнере и, в то же время, гарантировать, что флюид или жидкость в контейнере не образует полной воронки, и на дне контейнера остается флюид, когда контейнер вращается. Скорость вращения контейнера также зависит от вязкости флюида или жидкости в контейнере. Карусель вращается со скоростью, обеспечивающей возможность контроля конкретного количества контейнеров за данный период времени, например 200 предметов в минуту, или 400 предметов в минуту,или 600 предметов в минуту, или 800 предметов в минуту, или 1200 предметов в минуту, или даже больше. Количество контролируемых предметов в минуту может зависеть от времени, используемого для вращения каждого из контейнеров, поскольку для флюидов большой вязкости может потребоваться более длительный период вращения по сравнению с флюидами или жидкостями малой вязкости. На фиг. 2 показан частично сквозной вид карусели 12 устройства 10 контроля, показанного на фиг. 1. На фигуре показано размещение камер 36 и 38 относительно источников 40 и 42 света. В поле зрения камер 36 и 38 может попадать более одного держателя 14 с соответствующим контейнером 16. Согласно вышеуказанному, источники 40 и 42 света, по существу, охватывают поле зрения камер 36 и 38 соответственно. На фиг. 3 показан схематический сквозной вид карусели 12, показанной на фиг. 1, а также двигателя, приводящего в движение карусель 12. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, двигатель 58 представляет собой двигатель от компании NSK типа М-YS5120GN011, снабженный блоком драйвера ESA25. Однако в других вариантах осуществления настоящего изобретения можно применять другие двигатели или блоки драйвера. На фиг. 5 показан схематический вид карусели 12, где стержень 60 проходит от верхнего кольца 62 через нижнее кольцо 64. Стержень 60 сопряжен с устройством 66 блокировки, ограничивающим нисходящее движение стержня 60. Пружина 68 толкает стержень 60 вниз. На дальнем конце стержня 60 установлена часть 70 сопряжения. Часть 70 сопряжения содержит вращающуюся деталь 72 для приема верхней части контейнера 16. Контейнер 16 удерживается между вращающейся частью 72 и приемной частью 75 вращающего двигателя 74, установленной под поверхностью 76 карусели 12. Вращающаяся часть 72 включает в себя пружину для удержания контейнера на месте. Вращающий двигатель 74 вращает контейнер 16 в направлении либо по часовой стрелке, либо против часовой стрелки относительно продольной оси контейнера и/или стержня 60. Каждый из двигателей 74 действует под управлением отдельного блока управления, который может представлять собой микропроцессор или микроконтроллер, включающий в себя программное обеспечение для управления работой двигателя 74. Все блоки управления 74 объединены в сеть, например, магистральную сеть CAN, где электрические соединения между блоками 78 управления образованы группой 80 проводников, также соединяющих каждый из блоков 78 управления с корневым контроллером 88. Когда контейнер 16 нужно загрузить между двигателем 74 и вращающейся частью 72 части 70 со- 13012468 пряжения, стержень 60 должен быть поднят, чтобы контейнер 16 можно было вставить между этими частями. При вращении карусели 12 дальний конец устройства 66 блокировки входит в зацепление с поднимающейся частью 32 выступающей части 30, и стержень 60 смещается вверх. Когда держатель 14 находится вблизи конца поднимающейся части 32, контейнер 16 будет вблизи выходной точки 44 карусели, и третье колесо 46 удаляет контейнер 16 с карусели 12. Когда держатель 14 достигает точки 28 сброса,вращающаяся часть 72 и вращающий двигатель 74 все еще достаточно разделены для приема контейнера 16 со второго колеса 26. Когда контейнер 16 принят между вращающейся частью 72 и вращающим двигателем 74, пружина 68 давит на стержень 60 вниз, а устройство блокировки 66 скользит вниз по опускающейся части 34 защитной части 30. На фиг. 4 показан схематический вид кольцевого контакта 84 устройства 10 контроля. Кольцевой контакт 84 подключен к группе 80 проводников через электрическое соединение 85. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, используется кольцевой контакт от Northrop Grumman серии АС 6098. На фиг. 6 показано схематическое представление варианта осуществления возвратной системы для возврата контейнеров 16, для которых обработка изображения от двух камер 36 и 38 привела к двум разным исходам. Детектор, установленный на лапке 82, обнаруживает наличие контейнера 16, что позволяет переносить контейнер с колеса 46 либо обратно на одно из колес 24 или 26, либо обратно в хранилище контейнеров системы 18 подачи. На фиг. 7 показана схема, иллюстрирующая компоненты, используемые для устройства 10 контроля, отвечающего настоящему изобретению. Вращающие двигатели 74 по отдельности управляются блоком 78 управления. Блок 78 управления управляет направлением и скоростью вращения вращающего двигателя 74. Каждый блок 78 управления подключен к двум соседним блокам управления через группу 80 проводников в магистральной сетиCAN. Группа 80 проводников имеет внешнее соединение через соединение типа шины CAN 86 с кольцевым контактом 84. Корневой контроллер 88 осуществляет связь с отдельными блоками 78 управления. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, используются вращающие двигатели от компании Faulhaber типа 3564 К 048 В K312. Выбор двигателя зависит от размеров и/или массы объекта, т.е. контейнера и/или текучей среды или жидкость, подлежащей вращению. Кольцевой контакт 84 соединен с корневым контроллером 88 как через цифровой вход/выход, так и через шину CAN 86. Корневой контроллер 88 осуществляет связь с PLC как через цифровой вход/выход 90, так и через соединение 94 типа шины CAN. Корневой контроллер 88 дополнительно подключен к контроллеру 102 получения, который управляет получением изображений от камер 36 и 38. Соединение между корневым контроллером 88 и контроллером 102 получения, согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, обеспечено сетевым соединением 100 на основе шины CAN. Система наблюдения обозначена в целом позицией 116 и представлена пунктирной линией, окружающей элементы, составляющие устройство отображения устройства контроля 10. Контроллер 102 получения размещен в или подключен к блоку 104 контроля частиц, который представляет собой компьютер. Контроллер 102 получения также подключен к блоку 106 захвата кадра, регистрирующему изображения от одной или нескольких камер 36 и 38, поступающие по линии 108 связи камеры. Линия 108 связи камеры может представлять собой беспроводное или проводное соединение. Контроллер 102 получения подключен к блоку 106 захвата кадра через соединение цифрового входа/выхода 110. Корневой контроллер 88 управляет работой контроллера 102 получения. Элементы, составляющие системы 116 наблюдения, могут быть одинаковыми ил разными, в том смысле, что, например, разные процессоры могут быть необходимы или желательны для обработки изображений, захваченных разными камерами. Камера или камеры могут обнаруживать объекты или дефекты диаметром или размером свыше 10 мкм, согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения,можно обнаруживать объекты или дефекты размером не менее 50 мкм. Кольцевой контакт 84 подключен к двигателю для карусели 58. Двигатель 58 содержит кодер 96. Корневой контроллер 88 осуществляет синхронизацию аппаратных таймеров как в отдельных блоках 78 управления, так и в контроллере 102 получения. Корневой контроллер 88 рассылает пакет данных,содержащий позицию карусели 12, считанную с кодера 96, совместно со временем записи позиции. Эта информация или пакет данных, предпочтительно рассылается периодически, например каждые 5 мс. Корневой контроллер 88 подключен к PLC 92 через цифровой вход/выход 90 и через соединение 94 на основе шины CAN. PLC 92 управляет устройством 10 контроля в целом, тогда как контроллер 102 получения в ПК 104 контроля частиц и вращение вращающих двигателей 74 находятся под управлением корневого контроллера 88. Система SCADA 112 подключена к ПК 104 контроля и к PLC 92 по локальной сети 114, в настоящее время, предпочтительно, представляющей собой сеть Ethernet и/или реализованной как решениеProfibus. Сетевое соединение может быть образовано беспроводным или проводным сетевым соединением. SCADA 112 управляет работой PLC 92 и может содержать базу данных, включающую в себя информацию о продукте и информацию журнала процесса. Камеры 36 и 38 работают в автономном режиме, то есть камерам не нужно принимать запускающий сигнал, чтобы записать изображение. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, изображения записываются с частотой 128 Гц, с интервалом 7,8 мс между кадрами или изображениями. Возможны, конечно, и другие скорости записи. Когда камера начинает запись изображения или кадра, синхросигнал поступает на контроллер 102 получения через блок 106 захвата кадра, что позволяет контроллеру 102 получения устанавливать, когда началась запись нового изображения. Поскольку передача полного изображения, записанного камерой, требует большой пропускной способности линии связи, например кабельной или проводной, может оказаться полезным ограничить объем передаваемых данных. Одно ограничение может заключаться в выборе записи серых или черно-белых изображений. Другое может заключаться в передаче только части изображения, т.е. субизображения. Субизображение может содержать часть полного изображения, записанного камерой, где изображен контролируемый объект, т.е. контейнер. Контроллер 102 получения способен прогнозировать или вычислять позицию карусели 12 до записи изображения от любой из камер 36 или 38 и, таким образом, определять, где должны находиться субизображения изображений, записанных камерами 36 и 38, чтобы субизображения содержали контейнер 16. Размер субизображения определяется индивидуально для каждого контролируемого продукта, поскольку два конкретных продукта не обязательно имеют одну и ту же общую геометрическую конфигурацию. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения,используется камера от компании Mikrotron типа МС 1310. Камера создает изображения, имеющие разрешение 12801024 пикселей, с квантованием 8 бит/пиксель. Размеры субизображения, предпочтительно, сообщаются камере до начала контроля. Не требуется сообщать размеры после каждого отключения устройства, поскольку значения могут храниться в энергонезависимой памяти. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения,субизображение определяется как прямоугольное изображение. Кроме того, каждый раз получается только одно субизображение. Однако можно предусмотреть варианты осуществления, где по выбору используется несколько субизображений. Множественные субизображения могут позволить системе одновременно контролировать несколько контейнеров. Выбор и управление субизображениями осуществляется через программно-аппаратное обеспечение, загруженное в ЭСППЗУ камеры, загружаемое в FPGA камеры при инициализации камеры. Кроме того, значения, относящиеся к субизображению, могут переноситься с ПК 112 SCADA или с ПК 104 контроля на камеру в процессе инициализации. Субизображение может перемещаться по оси у изображения в камере. Начальные и конечные координаты субизображения определяются индивидуально для каждого типа контролируемого продукта. Размеры и координаты являются частью профиля получения для конкретного продукта, который контроллер 102 получения может использовать для управления захватом или записью изображения. Профиль получения может загружаться в контроллер 102 получения при запуске или инициализации системы с ПК 104 контроля или ПК 112 SCADA. Контроллер 102 получения управляет получением или записью изображений с камеры. Управление субизображением осуществляется на основании информации в профиле получения и информации метки времени, связанной с позицией карусели 12, полученной от корневого 88 контроллера. Согласно настоящему изобретению можно предусмотреть управление субизображением на основании анализа изображения. Можно предусмотреть субизображения, формы которых отличаются от прямоугольной или квадартной, например субизображения, точно соответствующие контуру контейнера. В общем случае может быть N вращающих или крутящих двигателей 74 и соответствующих блоков 78 управления. Согласно предпочтительному в настоящее время варианту осуществления настоящего изобретения, все N вращающих или крутящих двигателей 74 соответствующих блоков 78 управления идентичны. N может быть любым натуральным числом, но предпочтительно число от 20 до 150, например 40, 50 или 100. Карусели 12, приспособленные для контроля крупных контейнеров или бутылей, могут содержать меньшее количество станций, чем карусель, приспособленная для контроля более мелких контейнеров или бутылей. Критерии для перемещения субизображения состоят в том, что субизображение должно следовать за контролируемым контейнером с момента, когда контейнер входит в поле зрения камер и до момента,когда он покидает поле зрения камер. В нижеследующем описании корневой контроллер будем называть ведущим контроллером, а контроллер двигателя и контроллер получения - подчиненным контроллером.- 15012468 Ведущий контроллер осуществляет синхронизацию аппаратного таймера на каждом подчиненном контроллере через шину CAN, благодаря чему ведущий контроллер и подчиненные контроллеры имеют одну и ту же настройку времени. Ведущий контроллер периодически рассылает, в данном случае, каждые 5 мс, следующую информацию: (vpos, tpos), где vpos - позиция карусели контроля, считанная с кодера двигателя карусели, иtpos - время считывания позиции. Информация, рассылаемая с ведущего контроллера, сохраняется в каждом подчиненном контроллере в структуре данных ptfifo, FIFO позиция-время глубиной в 2 кортежа (vpos/tpos). С использованием ptfifo подчиненный контроллер может вычислять vpos(tpos), т.е. позицию карусели контроля как функцию времени, которая, в общем случае, является экстраполяцией имеющейся информации. Камера работает в автономном режиме, то есть камере не нужно принимать запускающий сигнал,чтобы записать изображение. В данном случае, камера записывает изображения с частотой 128 Гц с интервалом 7,8 мс между изображениями. Запись каждого изображения начинается с генерации сигнала вертикальной синхронизации, который поступает на контроллер получения через блок захвата кадра,благодаря чему контроллер получения знает, когда камера начинает оцифровку нового изображения. Контроллер получения способен прогнозировать позицию карусели контроля при записи следующего изображения и, таким образом, также, когда и насколько нужно переместить субизображение до того, как будет записано следующее изображение, чтобы субизображение, по существу, следовало за контейнером. Контроллер получения осуществляет управление субизображениями на основании вышеописанной информации меток времени, полученной от корневого контроллера, и данных в профиле получения,структуры данных acqprof. Профиль получения это таблица секторов, упорядоченных по позиции карусели контроля. Один сектор задается как 360/N часть карусели контроля. Карусель контроля содержит N станций, как показано на фиг. 8, N - количество станций, обычно 40, 50 или 100. Для каждого сектора в профиле получения acqprof хранятся следующие данные:vposl: начальная позиция сектора относительно кодера двигателя карусели;vpos2: конечная позиция сектора относительно кодера двигателя карусели;vacql: начальная позиция субизображения в изображении камеры в vpos1;vacq2: конечная позиция субизображения в изображении камеры в vpos2. Основные вычисления в связи с записью изображений:tperimage: время между двумя нормальными синхроимпульсами (изображения получаются по синхросигналу);vacqeff: фактическое количество импульсов, генерируемых модулем (начальное значение = 0). Следующие вычисления выполняются контроллером получения по каждому сигналу вертикальной синхронизации, генерируемому камерой:DOACQSEQ от контроллера получения на блок захвата кадра; аргументы функции задают состояние соответствующего цифрового сигнала. При высоком сигнале (1) блок захвата кадра записывает изображения с камеры, при низком сигнале(0) блок захвата кадра игнорирует изображения с камер, т.е. сигнал действует как шлюз для изображений. Конкретная карусель может быть приспособлена для приема размера бутыли или контейнера в интервале, т.е. без ограничения способности карусели принимать контейнеры только одного конкретного размера, например, путем обеспечения совокупности адаптеров или приемников для вращающейся части 72 блока двигателя и/или приемной части 75. Система или устройство контроля может быть размещено линейно с другими системами или устройствами обработки, например средствами упаковки или заполнения. На фиг. 9 а-9 с показана схематическая иллюстрация последовательности изображений, записанных камерой. Контейнер перемещается по оси у кадра изображения камеры, и записывается последовательность изображений и субизображений. Субизображения поступают на блок обработки изображений, согласно описанному выше. На фиг. 10 схематически показана карусель 12 устройства 10' контроля, где используется альтернативная конфигурация камеры. Внутри карусели 12 размещены четыре камеры 120, 122, 124, 126. Согласно варианту осуществления, показанному на фиг. 10, камеры 120, 122, 124, 126 расположены так, что поля зрения, заданные камерами 120, 122, 124, 126 направлены на дно карусели 12. Чтобы камеры 120,122, 124, 126 контролировали контейнеры, четыре зеркала, только два из которых видны на фигуре, а именно 128 и 130, расположены так, что камеры могут контролировать контейнеры. Согласно альтернативному варианту осуществления, все или некоторые камеры расположены так, что поля зрения направлены непосредственно на контейнеры, например камеры, показанные на фиг. 1. В других вариантах осуществления, в поле зрения камер, т.е. между камерой и контейнером, могут находиться фильтры, призмы или другие оптические компоненты, чтобы изменять или модифицировать свет, проходящий от источника света к камере или камерам. На фиг. 11 показано устройство контроля 10", имеющее карусель 12. Камеры 132 и 134 расположены аналогично показанным на фиг. 10, хотя, согласно альтернативным вариантам осуществления, камеры 132 и 134 могут располагаться, как показанные, например, на фиг. 1. Два источника 136 и 138 света располагаются так, что свет, излучаемый источниками 136 и 138 света, не направлен непосредственно в поле зрения, заданное соответствующей камерой. Эта конфигурация призвана обеспечить контроль таких объектов, как, например, волокна, что может оказаться невозможным для конфигурации, показанной, например, на фиг. 1 а. На фиг. 12 схематически показан вариант осуществления устройства контроля, включающего в себя камеру 144, для осуществления контроля контейнеров до того, как контейнеры поступят в карусель. Причины для осуществления начального контроля могут состоять в обнаружении разбитых или поврежденных контейнеров, которые могут разрушиться или еще больше повредиться при удержании держателями в карусели. Камера, предпочтительно, расположена вблизи конца винта 20, что позволяет выталкивать или выбраковывать контейнеры до их поступления на карусель. Согласно варианту осуществления,- 17012468 показанному на фиг. 12, камера контролирует контейнеры, пока они удерживаются в колесе 24. Контроль, осуществляемый камерой 144, может осуществляться под управлением того же компьютера или устройства, которое осуществляет контроль посредством камер, размещенных в карусели, предпочтительно контролем, осуществляемым камерой 144, управляет отдельное устройство или компьютер. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих флюид или жидкость, способ содержит этапы, на которых перемещают совокупность контейнеров вдоль пути перемещения между источником света и первой камерой, причем указанные контейнеры с флюидом или жидкостью, по меньшей мере, частично прозрачны или полупрозрачны для излучения от указанного источника света,при этом первая камера включает в себя микросхему КМОП и задает поле зрения, так что путь перемещения пересекает поле зрения,вращают каждый из контейнеров в направлении по часовой стрелке и/или против часовой стрелки для приведения в движение флюида, содержащегося в каждом из контейнеров,останавливают вращение каждого из контейнеров прежде, чем каждый из контейнеров войдет в поле зрения, или останавливают вращение каждого из контейнеров после того, как каждый из контейнеров войдет в поле зрения, причем первая камера регистрирует последовательность цифровых изображений по мере того, как контейнер проходит между источником света и камерой, а флюид продолжает вращение в невращающемся контейнере,выбирают часть каждого из цифровых изображений, причем часть, по существу, соответствует контуру конкретного контейнера,передают каждую из частей на блок цифровой обработки изображений,причем блок цифровой обработки изображений обрабатывает часть последовательности цифровых изображений, посредством сравнения части изображений последовательности с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере,причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. 2. Способ по п.1, в котором обработку осуществляют посредством блока цифровой обработки изображений, сравнивающего по меньшей мере две части двух определенных цифровых изображений, для обнаружения нежелательных объектов или дефектов в конкретном контейнере. 3. Способ по п.1, в котором обработку осуществляют посредством блока цифровой обработки изображений, анализирующего по меньшей мере одно цифровое изображение, для обнаружения нежелательных объектов или дефектов в конкретном контейнере. 4. Способ по п.1, в котором обработку осуществляют посредством вычитания двух изображений в последовательности или вне последовательности. 5. Способ по п.1, в котором обработку осуществляют посредством сравнения части конкретного цифрового изображения с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере. 6. Способ по любому из пп.1-5, в котором источник света располагается по одну сторону пути перемещения напротив камеры и/или источник света располагается по ту же сторону от пути перемещения,что и камера. 7. Способ по любому из предыдущих пунктов, в котором контейнеры транспортируют, по существу, с постоянной скоростью вдоль пути перемещения. 8. Способ по любому из предыдущих пунктов, дополнительно содержащий этапы, на которых используют вторую камеру, включающую в себя вторую микросхему КМОП, для регистрации света с определенным спектральным распределением, излучаемого вторым источником света, причем между вторым источником света и второй камерой задана вторая линия визирования, путь перемещения пересекает вторую линию визирования, вторая микросхема КМОП создает цифровое изображение, содержащее второе определенное количество пикселей,вторая камера регистрирует вторую последовательность кадров, образующую второе множество цифровых изображений, при прохождении контейнера между вторым источником света и второй камерой,выбирают вторую часть каждого из цифровых изображений второй последовательности, причем вторая часть, по существу, соответствует контуру конкретного контейнера,передают каждую из вторых частей на блок цифровой обработки изображений,причем блок цифровой обработки изображений обрабатывает второе множество частей цифровых изображений для обнаружения нежелательных объектов или дефектов в конкретном контейнере,сравнивают результат второй обработки с первой обработкой для подтверждения результата первой обработки. 9. Способ по п.8, дополнительно содержащий этапы, на которых- 18012468 при условии, что обработка первого множества цифровых изображений приводит к установлению наличия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению наличия объекта или дефекта, конкретный контейнер подлежит выбраковке, и/или альтернативно при условии, что обработка первого множества цифровых изображений приводит к установлению отсутствия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению наличия объекта или дефекта, конкретный контейнер подлежит повторному анализу, и/или альтернативно при условии, что обработка первого множества цифровых изображений приводит к установлению наличия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению отсутствия объекта или дефекта, конкретный контейнер подлежит повторному анализу, и/или альтернативно при условии, что обработка первого множества цифровых изображений приводит к установлению отсутствия объекта или дефекта, причем, если обработка второго множества цифровых изображений приводит к установлению отсутствия объекта или дефекта в конкретном контейнере, он пропускается для дальнейшей обработки. 10. Способ обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих флюид или жидкость, способ содержит этапы, на которых перемещают совокупность контейнеров вдоль пути перемещения между первым источником света и первым устройством регистрации света, причем контейнеры с флюидом или жидкостью, по меньшей мере, частично прозрачны или полупрозрачны для излучения от первого источника света, а также между вторым источником света и вторым устройством регистрации света,причем первое устройство регистрации света создает первое цифровое изображение и задает первое поле зрения так, что путь перемещения пересекает первое поле зрения, а второе устройство регистрации света создает второе цифровое изображение и задает второе поле зрения так, что путь перемещения пересекает второе поле зрения,вращают каждый из контейнеров в направлении по часовой стрелке и/или против часовой стрелки для приведения в движение флюида, содержащегося в каждом из контейнеров,останавливают вращение каждого из контейнеров прежде, чем каждый из контейнеров войдет в первое и второе поле зрения соответственно, или останавливают вращение каждого из контейнеров после того, как каждый из контейнеров войдет в первое и второе поле зрения соответственно,первое и второе устройства регистрации света регистрируют первую и вторую последовательности цифровых изображений по мере того, как контейнер проходит между первым и вторым источниками света и первым и вторым устройствами регистрации света соответственно, а флюид продолжает вращение в невращающемся контейнере,выбирают часть каждого из цифровых изображений первой и второй последовательности, причем часть, по существу, соответствует контуру конкретного контейнера,передают каждую из частей на блок цифровой обработки изображений,причем блок цифровой обработки изображений обрабатывает часть первой и второй последовательности цифровых изображений посредством сравнения части изображений первой и второй последовательности с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере,причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. 11. Способ по п.10, в котором первое и второе устройства регистрации света представляют собой камеры, каждая из которых включает в себя по меньшей мере одну микросхему КМОП. 12. Способ по п.10 или 11, дополнительно включающий в себя любой из этапов, охарактеризованных в пп.2-7 или 9. 13. Устройство для обнаружения нежелательных объектов или дефектов в совокупности контейнеров, содержащих флюид или жидкость, устройство содержит раму,транспортер, установленный на раме, образующий путь перемещения совокупности контейнеров,причем транспортер имеет вход и соответствующий выход, причем вход принимает совокупность контейнеров, выход выводит совокупность контейнеров,первый источник света, установленный на раме, причем первый источник света располагается по одну сторону пути перемещения, а контейнеры с флюидом или жидкостью, по меньшей мере, частично прозрачны или полупрозрачны для излучения от первого источника света,первую камеру, включающую в себя первую микросхему КМОП, причем первая камера установлена на раме и задает первое поле зрения так, что путь перемещения пересекает первое поле зрения, а первая микросхема КМОП создает первое цифровое изображение, первый блок цифровой обработки изображений, электрически связанный с первой камерой,- 19012468 при этом транспортер выполнен с возможностью вращения каждого из контейнеров в направлении по часовой стрелке и/или против часовой стрелки с помощью средства вращения для приведения в движение флюида, содержащегося в каждом из контейнеров,и останавки вращения каждого из контейнеров прежде, чем каждый из контейнеров войдет в поле зрения, или останавки вращения каждого из контейнеров после того, как каждый из контейнеров войдет в поле зрения,первая камера выполнена с возможностью регистрировать последовательность цифровых изображений по мере того, как контейнер проходит между первым источником света и первой камерой, а флюид продолжает вращение в невращающемся контейнере,и выбирать часть каждого из цифровых изображений, по существу, соответствующую контуру конкретного контейнера, и передает часть на блок цифровой обработки изображений,а первый блок цифровой обработки изображений выполнен с возможностью обрабатки части из первой последовательности цифровых изображений посредством сравнения части изображений первой последовательности с опорным изображением для обнаружения нежелательных объектов или дефектов в конкретном контейнере,причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. 14. Устройство по п.13, в котором транспортер представляет собой вращающуюся карусель, ленточный транспортер, цепной транспортер или любые их комбинации. 15. Устройство по п.14, в котором транспортер приводится в движение непосредственно серводвигателем, шаговым двигателем или линейным двигателем, альтернативно редукторным средством. 16. Устройство по любому из пп.13-15, дополнительно содержащее второй источник света, излучающий свет с определенным спектральным распределением, установленный на раме, причем второй источник света располагается по одну сторону пути перемещения,вторую камеру, включающую в себя вторую микросхему КМОП, для регистрации света с определенным спектральным распределением, излучаемого вторым источником света, причем вторая камера задает второе поле зрения, путь перемещения пересекает второе поле зрения, вторая микросхема КМОП создает второе цифровое изображение, содержащее второе определенное количество пикселей, вторая камера регистрирует вторую последовательность цифровых изображений при прохождении конкретного контейнера через второе поле зрения. 17. Устройство по любому из пп.13-15, дополнительно содержащее вторую камеру, включающую в себя вторую микросхему КМОП, для регистрации света с определенным спектральным распределением, излучаемого первым источником света, причем вторая камера задает второе поле зрения, путь перемещения пересекает второе поле зрения, вторая микросхема КМОП создает второе цифровое изображение, содержащее второе определенное количество пикселей, вторая камера регистрирует вторую последовательность цифровых изображений при прохождении конкретного контейнера через второе поле зрения. 18. Устройство по любому из пп.16 или 17, в котором вторая камера электрически связана с первым блоком цифровой обработки изображений. 19. Устройство по любому из пп.16 или 17, дополнительно содержащее второй блок цифровой обработки изображений, и вторая камера электрически связана со вторым блоком цифровой обработки изображений. 20. Устройство по любому из пп.18 или 19, в котором часть каждого из вторых цифровых изображений, по существу, соответствующая контуру конкретного контейнера, поступает на блок цифровой обработки изображений,первый или второй блок цифровой обработки изображений обрабатывает вторую последовательность цифровых изображений для обнаружения нежелательных объектов или дефектов в конкретном контейнере,причем обработка приводит к установлению того, что объект или дефект присутствует, либо отсутствует в конкретном контейнере. 21. Устройство по любому из пп.13-20, в котором путь перемещения задает вход и соответствующий выход, причем вход принимает совокупность контейнеров, выход выводит совокупность контейнеров,возвратный транспортер переносит конкретные контейнеры от выхода к входу. 22. Устройство по п.21, в котором возвратный транспортер представляет собой вращающуюся карусель, ленточный транспортер, цепной транспортер, одну или несколько шестеренок или любые их комбинации. 23. Устройство по пп.14 или 22, в котором первая и/или вторая камера располагается в карусели.
МПК / Метки
МПК: G01N 21/88, G01N 21/90, G06T 7/00
Метки: дефектов, совокупности, наполненных, обнаружения, устройство, посторонних, контейнеров, способ, частиц
Код ссылки
<a href="https://eas.patents.su/26-12468-sposob-i-ustrojjstvo-obnaruzheniya-postoronnih-chastic-ili-defektov-v-sovokupnosti-napolnennyh-kontejjnerov.html" rel="bookmark" title="База патентов Евразийского Союза">Способ и устройство обнаружения посторонних частиц или дефектов в совокупности наполненных контейнеров</a>
Способ обнаружения дефектов в листовом стекле
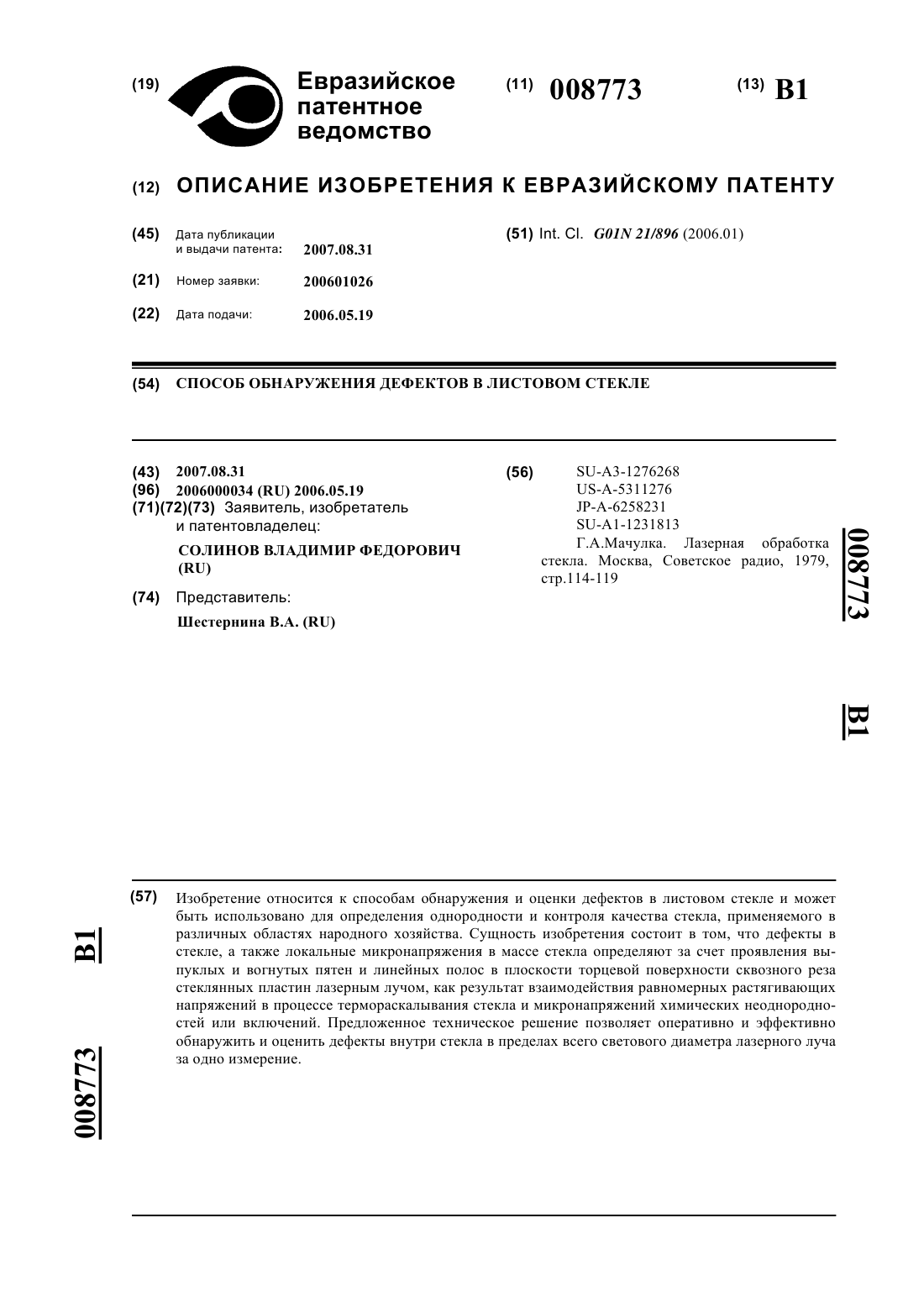
Номер патента: 8773
Опубликовано: 31.08.2007
Автор: Солинов Владимир Федорович
МПК: G01N 21/896
Метки: обнаружения, стекле, листовом, дефектов, способ
Формула / Реферат:
Способ обнаружения дефектов в листовом стекле с использованием лазерного излучения и последующей визуализации или фотографирования, отличающийся тем, что дефекты, а также локальные микронапряжения в массе стекла определяют за счет проявления выпуклых или вогнутых пятен и линейных полос в плоскости торцевой поверхности сквозного реза стеклянных пластин лазерным лучом, как результат взаимодействия равномерных растягивающих напряжений в процессе...
Погрузочно-разгрузочное устройство для контейнеров
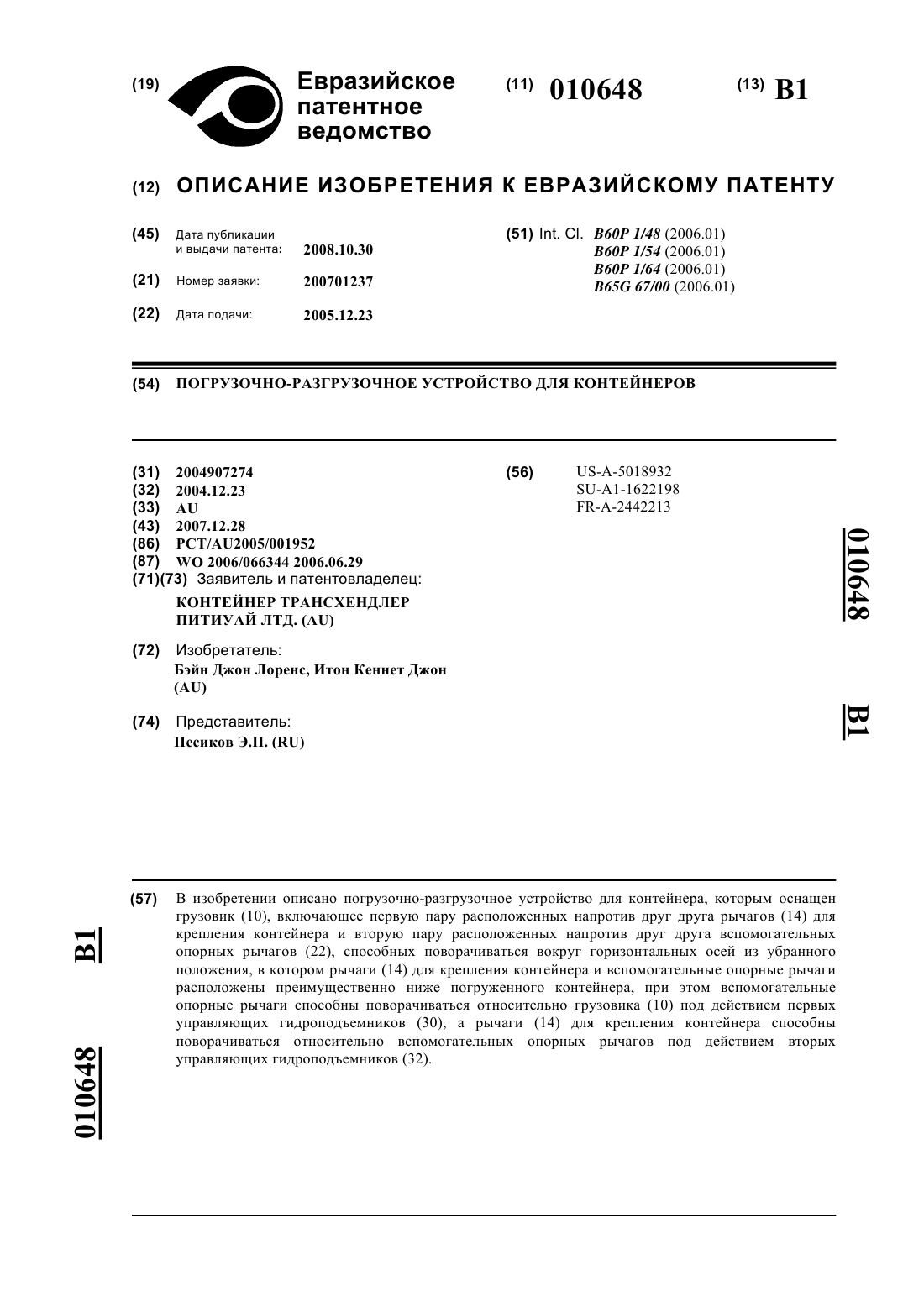
Номер патента: 10648
Опубликовано: 30.10.2008
Авторы: Итон Кеннет Джон, Бэйн Джон Лоренс
МПК: B60P 1/48, B60P 1/64, B60P 1/54...
Метки: погрузочно-разгрузочное, контейнеров, устройство
Формула / Реферат:
1. Погрузочно-разгрузочное устройство для контейнера, снабженное средством крепления контейнера и вспомогательным опорным средством, отличающееся тем, что средство крепления контейнера и вспомогательное опорное средство способны независимо поворачиваться вокруг соответствующих преимущественно горизонтальных осей из убранного положения, в котором средство крепления контейнера и вспомогательное опорное средство расположены преимущественно ниже...
Устройство и способ для производства заготовок контейнеров
Номер патента: 8719
Опубликовано: 29.06.2007
Автор: Густафссон Пер
МПК: B31B 1/64, B31B 23/60, B31B 37/60...
Метки: заготовок, контейнеров, устройство, производства, способ
Формула / Реферат:
1. Устройство для производства заготовок (2) контейнеров из полосы (3) материала, содержащее множество инструментов (5), установленных на роторном инструментодержателе (4), который выполнен с возможностью при вращении перемещать каждый инструмент (5) по рабочей траектории (WP), на которой каждый инструмент (5) имеет возможность взаимодействия с полосой (3) материала для соединения противоположных участков стенки полосы (3) материала вдоль...
Устройство для обработки упаковочных материалов и способ изготовления упаковочных контейнеров
Номер патента: 1122
Опубликовано: 30.10.2000
Авторы: Кацумата Сигео, Морияма Ясуюки, Кумета Юкихиса
Метки: обработки, способ, контейнеров, устройство, упаковочных, изготовления, материалов
Формула / Реферат:
1. Устройство для обработки упаковочного материала, содержащее (a) транспортирующее средство для перемещения многослойного упаковочного материала, который образован из бумажной основы и полимерных пленок и который имеет зону разрыва в месте, соответствующем положению открывающего средства; (b) запечатывающее устройство для запечатывания указанного упаковочного материала; и (c) нагревательное средство, расположенное в направлении перемещения...
Устройство с системами нагревания и температурного контроля жидкости в отдельном контейнере и в различных наборах контейнеров для парентеральных растворов
Номер патента: 8262
Опубликовано: 27.04.2007
Авторы: Корреа Биттенкоурт Жоао Боско, Алвес Переира Жозе Эдуардо
МПК: G05D 23/00, A61M 5/44
Метки: контроля, растворов, различных, контейнере, устройство, нагревания, парентеральных, отдельном, жидкости, контейнеров, наборах, температурного, системами
Формула / Реферат:
1. Устройство с системами нагревания и температурного контроля жидкости в отдельном контейнере и в различных наборах контейнеров для парентеральных растворов, предназначенное для индивидуального размещения и хранения бутылок или пакетов с внутривенным раствором в нагревательном чехле (15), оснащенном изолирующим устройством (16) и изолированным проводником (23), соединенным с электрическим разъемом (36), и выполненное с возможностью...
Предыдущий патент: Соус для детского питания
Следующий патент: Способ, система и программный продукт для управления обработкой транспортных средств
Случайный патент: Морской сейсмический источник и способ выработки в водоеме сейсмических сигналов