Способ ослабления низкочастотных помех в данных морской сейсмической косы с двумя типами датчиков


Формула / Реферат
1. Способ ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков, включающий следующие шаги:
определяют расчетный сигнал датчика вертикальной скорости путем умножения записанного сигнала датчика давления на вертикальное волновое число и функцию волны-спутника вертикальной скорости и путем деления на круговую частоту, плотность среды распространения и функцию волны-спутника давления;
определяют построенный сигнал датчика вертикальной скорости как линейную комбинацию расчетного сигнала датчика вертикальной скорости, помноженного на коэффициент смеси, и записанного сигнала датчика вертикальной скорости, помноженного на единицу за вычетом коэффициента смеси;
определяют восходящую компоненту волнового поля давления как половину разности записанного сигнала датчика давления и построенного сигнала датчика вертикальной скорости, помноженного на круговую частоту и плотность среды распространения и деленного на вертикальное волновое число;
определяют дисперсию в восходящей компоненте волнового поля давления путем распространения дисперсии в записанном сигнале датчика давления и дисперсии в записанном сигнале датчика вертикальной скорости, причем эти дисперсии представляют помехи;
определяют значение коэффициента смеси, которое минимизирует дисперсию в восходящей компоненте волнового поля давления, как среднеквадратичный уровень помех записанного сигнала датчика вертикальной скорости, деленный на сумму среднеквадратичного уровня помех записанного сигнала датчика вертикальной скорости и среднеквадратичного уровня помех расчетного сигнала датчика вертикальной скорости;
ослабляют низкочастотные помехи в построенном сигнале датчика вертикальной скорости и волновом поле давления восходящих волн путем подстановки значения коэффициента смеси в построенный сигнал датчика вертикальной скорости.
2. Способ по п.1, отличающийся тем, что определение расчетного сигнала датчика вертикальной скорости первоначально включает следующие шаги:
определяют глубину расположения приемника и
получают записанный сигнал датчика давления и записанный сигнал датчика вертикальной скорости на глубине расположения приемника.
3. Способ по п.1, отличающийся тем, что датчики давления содержат гидрофоны.
4. Способ по п.1, отличающийся тем, что датчики вертикальной скорости содержат вертикальные геофоны.
5. Способ по п.2, отличающийся тем, что определение расчетного сигнала датчика вертикальной скорости далее включает следующие шаги:
получают плотность среды распространения;
определяют вертикальное волновое число по временной круговой частоте, скорости распространения в среде и горизонтальному волновому числу;
определяют функцию волны-спутника давления по вертикальному волновому числу и глубине расположения приемника;
определяют функцию волны-спутника вертикальной скорости по вертикальному волновому числу и глубине расположения приемника и
определяют расчетный сигнал датчика вертикальной скорости с помощью плотности, вертикального волнового числа, функции волны-спутника давления и функции волны-спутника вертикальной скорости.
6. Способ по п.5, отличающийся тем, что вертикальное волновое число kz определяют в двухмерном случае, применяя следующее уравнение:

где w представляет собой временную круговую частоту,
с - скорость распространения сейсмической волны в среде, а
kx - горизонтальное волновое число в продольном направлении.
7. Способ по п.5, отличающийся тем, что вертикальное волновое число kz определяют в трехмерном случае, применяя следующее уравнение:

где w представляет собой временную круговую частоту,
с - скорость распространения сейсмической волны в среде,
kx - горизонтальное волновое число в продольном направлении, а
ky - горизонтальное волновое число в поперечном направлении.
8. Способ по п.6, отличающийся тем, что функцию волны-спутника давления gp определяют, применяя следующее уравнение:
где kz представляет собой вертикальное волновое число, a
zR - глубина расположения приемника.
9. Способ по п.8, отличающийся тем, что функцию волны-спутника вертикальной скорости gvz определяют, применяя следующее уравнение:
10. Способ по п.9, отличающийся тем, что определение построенного сигнала датчика вертикальной скорости Vzcon включает применение следующего уравнения:

где а представляет собой коэффициент смеси,
Vzrec - записанный сигнал датчика вертикальной скорости, а
Prec - записанный сигнал датчика давления.
11. Способ по п.10, отличающийся тем, что определение восходящей компоненты волнового поля давления включает использование плотности и вертикального волнового числа.
12. Способ по п.11, отличающийся тем, что определение восходящей компоненты волнового поля давления Pup включает применение следующего уравнения:

где Prec представляет собой записанный сигнал датчика давления, a
Vzcon - построенный сигнал датчика вертикальной скорости.
13. Способ по п.1, отличающийся тем, что определение ошибки в восходящей компоненте волнового поля давления включает следующие шаги:
переформулируют восходящую компоненту волнового поля давления в виде записанного сигнала датчика давления, записанного сигнала датчика вертикальной скорости и коэффициента смеси;
распространяют ошибки в членах, представляющих записанный сигнал датчика давления и записанный сигнал датчика вертикальной скорости, для получения дисперсий в членах, представляющих восходящую компоненту волнового поля давления, записанный сигнал датчика давления и записанный сигнал датчика вертикальной скорости;
дифференцируют дисперсии по коэффициенту смеси и
определяют значение коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления, приравнивая производную дисперсии восходящей компоненты волнового поля давления к нулю.
14. Способ по п.13, отличающийся тем, что переформулирование восходящей компоненты волнового поля давления включает применение следующего уравнения:

15. Способ по п.14, отличающийся тем, что распространение ошибок для получения дисперсий включает применение следующего уравнения:

где Var[×] обозначает дисперсию.
16. Способ по п.15, отличающийся тем, что определение значения коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления, включает применение следующего уравнения:

17. Способ по п.16, отличающийся тем, что определение значения коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления, включает применение следующего уравнения:

где N[×] обозначает среднеквадратичный уровень помех,
Vzrec - записанный сигнал датчика вертикальной скорости, a
Vzcal - эквивалентный сигнал датчика вертикальной скорости, полученный путем очистки сигнала датчика давления от ложных отражений от плоской морской поверхности.
18. Способ ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков, включающий следующие шаги:
определяют расчетный сигнал датчика вертикальной скорости путем умножения записанного сигнала датчика давления на вертикальное волновое число и функцию волны-спутника вертикальной скорости и путем деления на круговую частоту, плотность среды распространения и функцию волны-спутника давления;
определяют построенный сигнал датчика вертикальной скорости как линейную комбинацию расчетного сигнала датчика вертикальной скорости, помноженного на коэффициент смеси, и записанного сигнала датчика вертикальной скорости, помноженного на единицу за вычетом коэффициента смеси;
определяют падающую компоненту волнового поля давления как половину суммы записанного сигнала датчика давления и построенного сигнала датчика вертикальной скорости, помноженного на круговую частоту и плотность среды распространения и деленного на вертикальное волновое число;
определяют дисперсию в падающей компоненте волнового поля давления путем распространения дисперсии в записанном сигнале датчика давления и дисперсии в записанном сигнале датчика вертикальной скорости, причем эти дисперсии представляют помехи;
определяют значение коэффициента смеси, которое минимизирует дисперсию в падающей компоненте волнового поля давления, как среднеквадратичный уровень помех записанного сигнала датчика вертикальной скорости, деленный на сумму среднеквадратичного уровня помех записанного сигнала датчика вертикальной скорости и среднеквадратичного уровня помех расчетного сигнала датчика вертикальной скорости;
ослабляют низкочастотные помехи в построенном сигнале датчика вертикальной скорости и волновом поле давления падающих волн путем подстановки значения коэффициента смеси в построенный сигнал датчика вертикальной скорости.

Текст
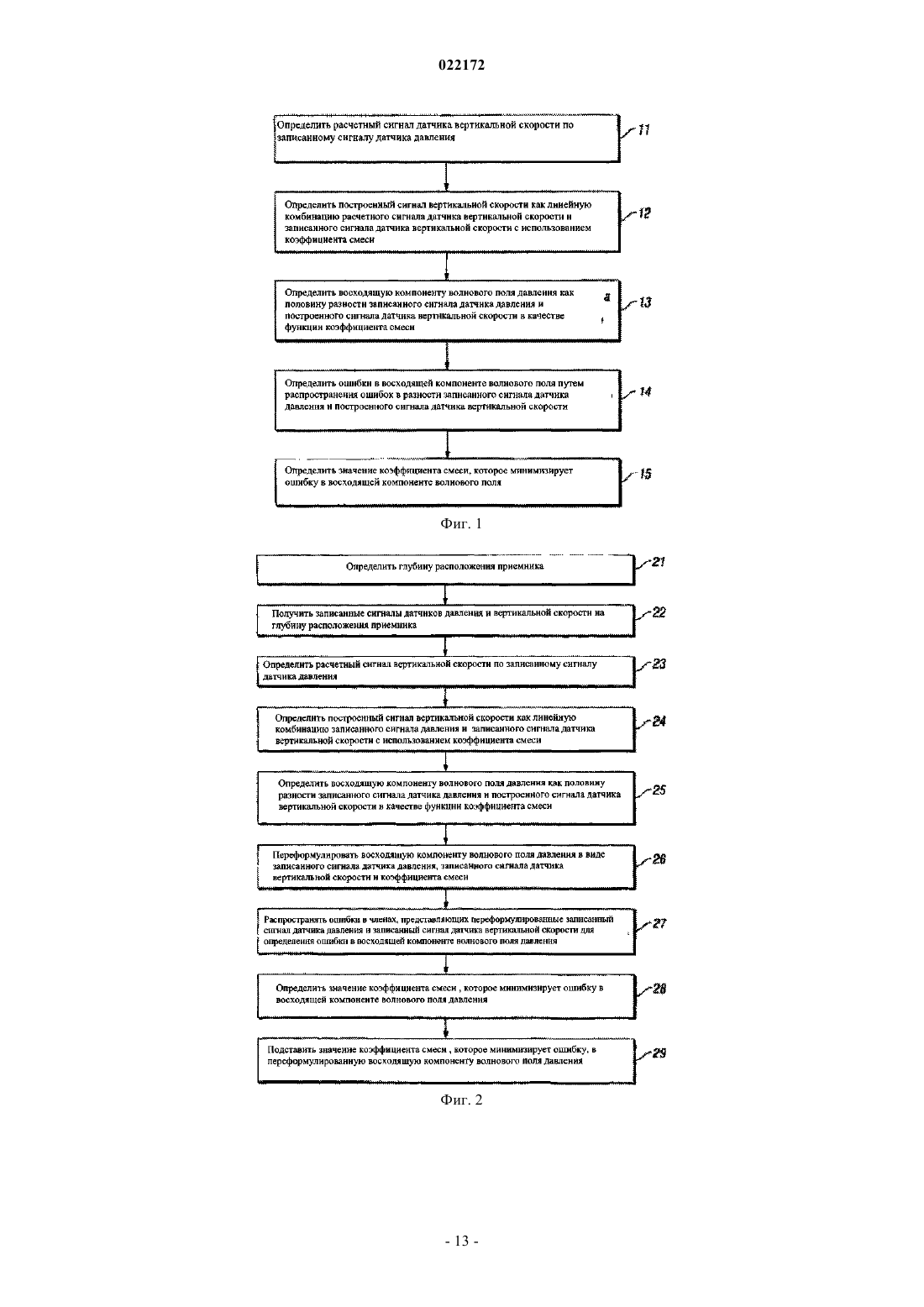
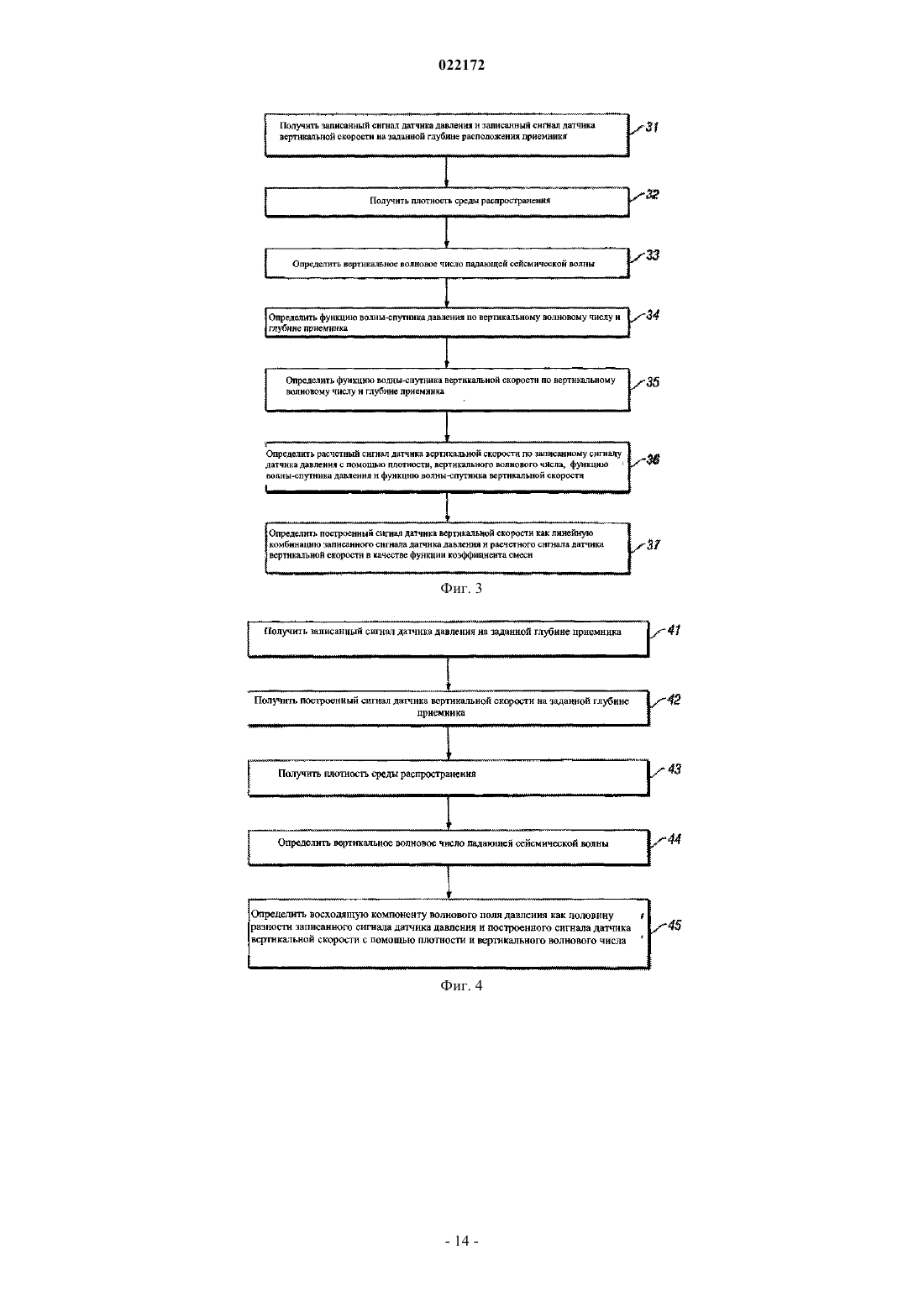
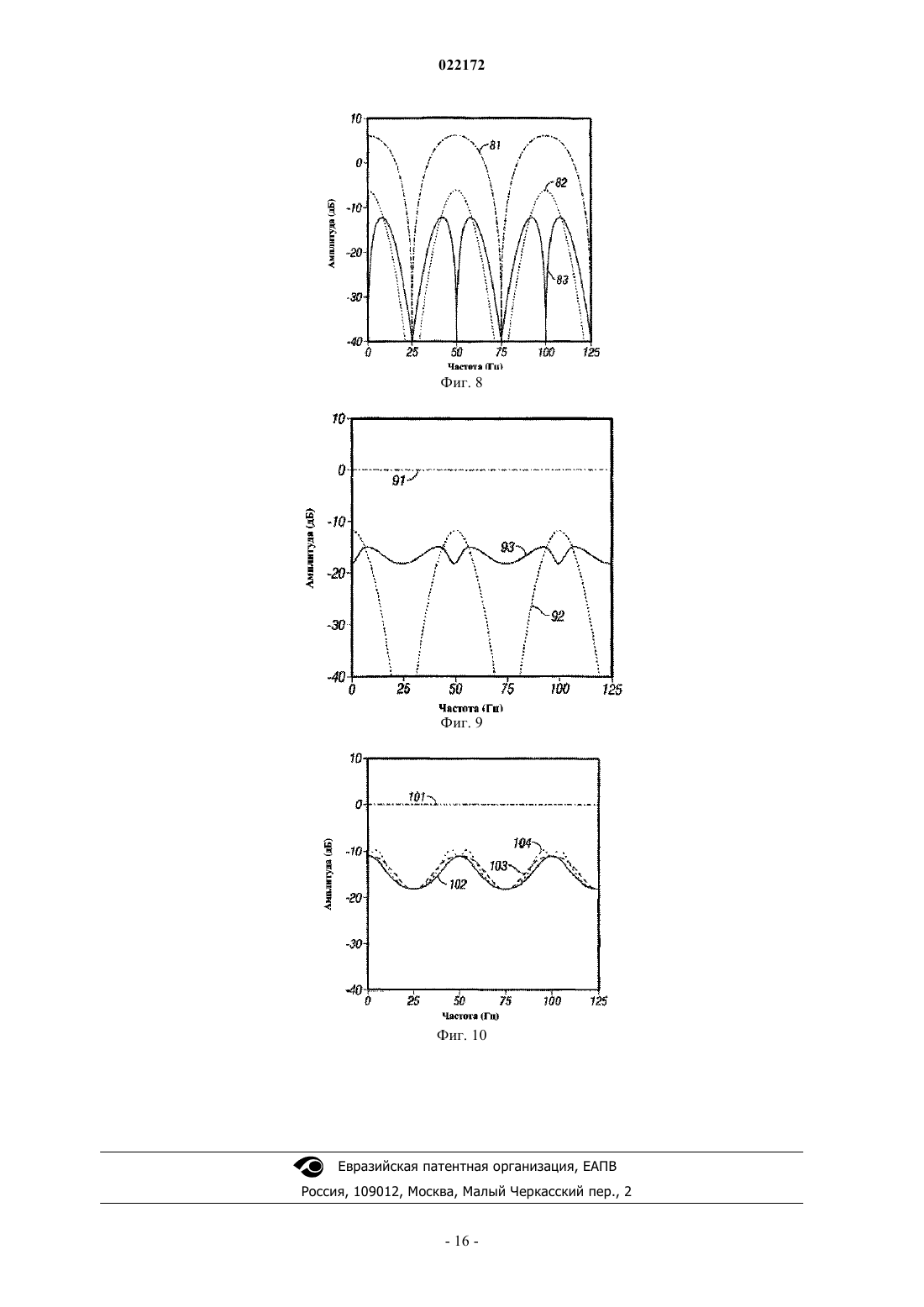
СПОСОБ ОСЛАБЛЕНИЯ НИЗКОЧАСТОТНЫХ ПОМЕХ В ДАННЫХ МОРСКОЙ СЕЙСМИЧЕСКОЙ КОСЫ С ДВУМЯ ТИПАМИ ДАТЧИКОВ Расчетный сигнал датчика вертикальной скорости определяют по записанному сигналу датчика давления. Построенный сигнал датчика вертикальной скорости определяется как линейная комбинация расчетного сигнала датчика вертикальной скорости и записанного сигнала датчика вертикальной скорости в данных сейсмической косы с двумя типами датчиков с использованием коэффициента смеси в качестве константы пропорциональности. Восходящая компонента волнового поля давления определяется как половина от разности записанного сигнала датчика давления и построенного сигнала датчика вертикальной скорости в качестве функции коэффициента смеси. Ошибка в восходящей компоненте волнового поля давления определяется путем распространения (накопления) ошибок в членах, представляющих записанный сигнал датчика давления и построенный сигнал датчика вертикальной скорости. Определяется значение коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления.(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) Область техники, к которой относится изобретение Настоящее изобретение в целом относится к области геофизической разведки. Более конкретно,изобретение относится к области ослабления помех в данных морской сейсмической косы с двумя типами датчиков. Предшествующий уровень техники В нефтегазовой промышленности геофизическая разведка обычно используется для содействия в поисках и оценке подземных формаций. Способы геофизической разведки позволяют получать сведения о структуре геологической среды, полезные для обнаружения и извлечения ценных полезных ископаемых, в особенности месторождений углеводородов, таких как нефть и природный газ. Хорошо известным способом геофизической разведки является сейсморазведка. При наземной сейсморазведке сейсмический сигнал генерируется на поверхности земли или вблизи от нее, а затем распространяется вниз в геологическую среду. При морской сейсморазведке сигнал также может распространяться вниз в водоеме, лежащем выше геологической среды. Источники сейсмических колебаний используются для генерации сейсмического сигнала, который, после распространения в земле, по меньшей мере, частично отражается ссйсмоотражающими горизонтами в геологической среде. Такие сейсмоотражающие горизонты, как правило, представляют собой границы между подземными формациями с различными упругими свойствами, конкретно, скоростью упругих волн и плотностью породы, что приводит к разности акустических импедансов на границах. Отраженные сейсмические волны регистрируются сейсмическими датчиками, также именуемыми "сейсмоприемниками", на поверхности земли или вблизи от нее, в вышележащем водоеме, или на известных глубинах в скважинах и записываются. Результативные сейсмические данные, полученные при проведении сейсморазведки, обрабатываются для получения информации, относящейся к геологическому строению и свойствам подземных формаций в исследуемой зоне. Обработанные сейсмические данные обрабатываются для отображения и анализа потенциального группового состава углеводородов в этих подземных формациях. Целью обработки сейсмических данных является извлечение из сейсмических данных максимального объема информации о подземных формациях для получения адекватного изображения геологической среды. При определении участков геологической среды, где существует вероятность обнаружения залежей нефти,крупные средства расходуются на сбор, обработку и интерпретацию сейсмических данных. Процесс построения поверхностей отражающих горизонтов, определяющих исследуемые подземные пласты по записанным сейсмическим данным, позволяет получить изображение среды по глубине или времени. Изображение строения геологической среды получают с целью предоставить интерпретатору возможность выбора участков, где с наибольшей вероятностью могут находиться залежи нефти. Чтобы удостовериться в наличии нефти, необходимо пробурить скважину. Бурение скважин для определения присутствия нефтяных залежей представляет собой чрезвычайно дорогостоящую и трудоемкую задачу. По этой причине сохраняется потребность в улучшении обработки и отображения сейсмических данных для получения изображения строения геологической среды, которое повысит возможности интерпретатора,независимо от того, выполняется ли интерпретация компьютером или человеком, оценивать вероятность того, что скопление нефти существует на определенном участке геологической среды. Подходящие сейсмические источники для генерации сейсмического сигнала при наземной сейсморазведке могут включать взрывчатые вещества или вибраторы. При морской сейсморазведке, как правило, применяется погружной сейсмический источник, буксируемый судном и периодически активируемый для генерации поля акустических волн. Волновое поле может генерироваться сейсмическими источниками нескольких типов, включая небольшой заряд ВВ (взрывчатого вещества), электрическую искру или дугу, морской вибратор и, как правило, пушку. Пушка сейсмического источника может представлять собой гидропушку, паровую пушку и, чаще всего, пневмопушку. Как правило, морской сейсмоисточник состоит не из одного элемента-источника, а из пространственно-распределенной группы источников. Такое расположение относится в особенности к пневмопушкам, которые в настоящее время являются наиболее распространенным видом морского сейсмоисточника. Соответствующие типы сейсмических датчиков, как правило, включают датчики скорости частиц, в особенности при наземной сейсморазведке, и датчики давления воды, в особенности при морской сейсморазведке. Иногда датчики смещения частиц, датчики ускорения частиц или датчики градиента давления используются вместо датчиков скорости частиц или в дополнение к ним. Датчики скорости частиц и датчики давления воды обычно известны специалистам под названием геофонов и гидрофонов соответственно. Сейсмические датчики могут размещаться по отдельности, но чаще размещаются в виде групп датчиков. Кроме того, в ходе морской сейсморазведки датчики давления и датчики скорости частиц могут размещаться совместно, объединенные попарно или в пары групп. При обычной морской сейсморазведке сейсморазведочное судно движется по поверхности воды,как правило, со скоростью около 5 морских узлов и везет оборудование сбора морских сейсмических данных, такое как оборудование навигационного управления, оборудование управления сейсмическими источниками, оборудование управления сейсмическими датчиками и записывающее оборудование. Оборудование управления сейсмическими источниками активирует сейсмический источник, буксируемый в водоеме сейсморазведочным судном, в выбранные моменты времени. Сейсмические косы, называемые также "сейсмоприемными кабелями", представляют собой удлиненные кабельные конструкции, буксируемые в водоеме сейсморазведочным судном, которое буксирует сейсмический источник, или другим сейсморазведочным судном. Как правило, ряд сейсмических кос буксируются за сейсморазведочным судном. Сейсмические косы содержат датчики для регистрации отраженных волновых полей, возбужденных сейсмическим источником и отраженных от отражающих границ. При традиционной методике сейсмические косы содержат датчики давления, такие как гидрофоны, однако предложены и сейсмические косы, которые в дополнение к гидрофонам содержат датчики скорости частиц воды или датчики ускорения частиц, например, акселерометры. Датчики давления и датчики движения частиц могут размещаться близко друг к другу, объединенные попарно или в пары групп вдоль сейсмического кабеля. После того, как отраженная волна достигает кабеля сейсмической косы, она продолжает распространяться к границе вода-воздух на поверхности воды, от которой волна отражается в нижнем направлении и снова регистрируется гидрофонами в сейсмической косе. Поверхность воды является хорошей отражающей границей, при этом коэффициент отражения почти равен единице по величине и отрицателен по знаку для сигналов давления. Волны, отраженные от поверхности, будут, таким образом, сдвинуты по фазе на 180 по отношению к волнам, распространяющимся в верхнем направлении (восходящим). Волны, распространяющиеся в нижнем направлении (нисходящие) и записываемые приемниками, обычно называются "отражением от поверхности" или "волной-спутником". В связи с отражением от поверхности водная поверхность действует как фильтр, который создает вырезы в спектре записанного сигнала,затрудняя запись данных за пределами выбранной полосы частот. Из-за влияния отражения от поверхности некоторые частоты в записанном сигнале усиливаются, тогда как другие ослабляются. Максимальное ослабление будет происходить на частотах, для которых расстояние, пройденное волной между регистрирующим гидрофоном и водной поверхностью, равно половине длины волны. Максимальное усиление будет происходить на частотах, для которых расстояние, пройденное волной между регистрирующим гидрофоном и водной поверхностью, равно одной четвертой длины волны. Длина акустической волны равна скорости, разделенной на частоту, при этом скорость акустической волны в воде составляет 1500 м в секунду. Соответственно, местоположение в частотном спектре итогового спектрального выреза легко поддается определению. Например, для сейсмической косы на глубине 7 метров и волн при вертикальном падении максимальное ослабление будет происходить на частоте около 107 Гц, а максимальное усиление - на частоте около 54 Гц. Датчик движения частиц, такой как геофон, обладает направленной чувствительностью, тогда как датчик давления, такой как гидрофон, ей не обладает. Соответственно, сигналы волнового поля восходящих волн, регистрируемые геофоном и гидрофоном, расположенными поблизости друг от друга, будут синфазными, тогда как записываемые сигналы волнового поля падающих волн будут не совпадающими по фазе на 180. Предлагаются различные методы использования этой разности фаз для уменьшения вырезов в спектре, вызванных отражением от поверхности, и, если записи выполняются на дне моря, для подавления кратных волн, распространяющихся в воде. Следует отметить, что альтернативой совмещению геофона и гидрофона является наличие достаточной пространственной плотности датчиков так,чтобы соответствующие волновые поля, записанные с помощью гидрофона и геофона, можно было интерполировать или экстраполировать для получения двух волновых полей в одном и том же местоположении. Специалистам хорошо известно, что сигналы давления и движения частиц можно объединять для получения поля как восходящих, так и падающих волн. При выполнении записей на морском дне поля восходящих и падающих волн можно последовательно объединять для устранения эффекта отражения от поверхности и ослабления распространяющихся в воде кратных волн в сейсмическом сигнале. Однако для применений, связанных с буксированием сейсмической косы, сигнал движения частиц рассматривается как обладающий ограниченной возможностью использования в связи с высоким уровнем помех в сигнале движения частиц. Вместе с тем, если бы при сборе данных с помощью буксируемой сейсмической косы существовала возможность получить менее зашумленные сигналы движения частиц, эффект отражения от поверхности мог бы быть устранен из данных. Для данных, получаемых с помощью датчиков движения, трудно достичь такой же ширины полосы частот, как для данных датчика давления, из-за помех, вызванных вибрациями в сейсмической косе, которые воспринимаются датчиками движения частиц. Однако эти помехи ограничены, главным образом,низкими частотами. Один из способов уменьшения таких помех состоит в использовании нескольких датчиков, соединенных последовательно или параллельно. Вместе с тем, такой подход не всегда позволяет уменьшить помехи в достаточной степени для получения отношения сигнал-помеха, удовлетворяющего требованиям дальнейшей обработки сейсмических данных. Таким образом, существует потребность в способе ослабления низкочастотных помех, обнаруженных в сигналах датчиков вертикальной скорости при объединении сигналов датчиков давления и сигналов датчиков вертикальной скорости в данных сейсмической косы с двумя типами датчиков. Сущность изобретения Настоящее изобретение представляет собой способ ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков путем объединения сигналов датчиков давления и сигналов датчиков вертикальной скорости. Расчетный сигнал датчика вертикальной скорости определяют по записанному сигналу датчика давления. Построенный сигнал датчика вертикальной скорости определяется как линейная комбинация расчетного сигнала датчика вертикальной скорости и записанного сигнала датчика вертикальной скорости в данных сейсмической косы с двумя типами датчиков с использованием коэффициента смеси в качестве константы пропорциональности. Восходящая компонента волнового поля давления определяется как половина разности записанного сигнала датчика давления и построенного сигнала датчика вертикальной скорости в качестве функции коэффициента смеси. Ошибка в восходящей компоненте волнового поля давления определяется путем распространения (накопления) ошибок в членах, представляющих записанный сигнал датчика давления и построенный сигнал датчика вертикальной скорости. Определяется значение коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления. Краткий перечень фигур чертежей Настоящее изобретение и его преимущества легче понять из следующего подробного описания и прилагаемых чертежей. На фиг. 1 представлена блок-схема, иллюстрирующая первый вариант осуществления изобретения для ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков путем объединения сигналов датчиков давления и сигналов датчиков вертикальной скорости. На фиг. 2 представлена блок-схема, иллюстрирующая второй вариант осуществления изобретения для ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков путем объединения сигналов датчиков давления и сигналов датчиков вертикальной скорости. На фиг. 3 представлена блок-схема, иллюстрирующая вариант осуществления настоящего изобретения для определения расчетного сигнала вертикальной скорости. На фиг. 4 представлена блок-схема, иллюстрирующая вариант осуществления настоящего изобретения для определения восходящей компоненты волнового поля давления. На фиг. 5 представлена блок-схема, иллюстрирующая вариант осуществления настоящего изобретения для определения коэффициента смеси, который минимизирует ошибку. На фиг. 6 представлен график сигнала и помех для записанных сигналов датчика давления и сигналов датчика вертикальной скорости. На фиг. 7 представлен график коэффициента смеси , определяемого по способу настоящего изобретения для сценария помех, который иллюстрируется на фиг. 6. На фиг. 8 представлен график построенного сигнала вертикальной скорости и вносимых помех, определенных по записанным сигналам датчиков давления и вертикальной скорости. На фиг. 9 представлен график восходящей компоненты волнового поля давления и вносимых помех, полученных по записанным сигналам датчиков давления и вертикальной скорости. На фиг. 10 представлен график сигнала и помех для восходящей компоненты волнового поля давления при коэффициенте смеси , рассчитанном по способу настоящего изобретения, показанному на фиг. 7, и при двух других субоптимальных вариантах расчета. Хотя настоящее изобретение будет описано в связи с предпочтительными вариантами осуществления, понятно, что изобретение не ограничивается только ими. Напротив, изобретение предназначено для того, чтобы охватить все альтернативные варианты, модификации и эквиваленты, которые могут быть включены в объем настоящего изобретения согласно прилагаемой формуле изобретения. Сведения, подтверждающие возможность осуществления изобретения Сейсмическая коса с двумя типами датчиков записывает сейсмическое волновое поле с помощью как датчиков давления, так и датчиков вертикальной скорости, что обеспечивает последующее разложение общего волнового поля на восходящие и падающие компоненты. Ошибка в оценке этих компонент увеличивается за счет помех на каждом датчике, но уменьшается благодаря статистической независимости измерений, выполняемых двумя датчиками. Нежелательные низкочастотные помехи на датчике вертикальной скорости можно устранить перед разложением путем замены низкочастотной части данных вертикальной скорости прогнозируемым сигналом вертикальной скорости, рассчитанным по сигналу давления. Такое прогнозирование учитывает факторы, к числу которых относятся свойства среды распространения, угол падения поступающей волны и "волна-спутник", возникающая при отражении сейсмического волнового поля на поверхности моря. Этот процесс замены уменьшает помехи, вносимые более зашумленным датчиком вертикальной скорости, хотя это происходит за счет снижения статистической независимости между помехами от давления и помехами от модифицированной вертикальной скорости. Этот процесс замены низкой частоты более подробно описан в патенте СШАUS 7359283 В 2,выданном Svein Vaage и др., под названием "System for Combining Signals of Pressure Sensors and Particle ному лицу правопреемника настоящего изобретения. Описан способ объединения сигналов датчика давления и датчика движения частиц, записанных с помощью морской сейсмической косы, для уменьшения помех в объединенных сигнале датчика давления и сигнале датчика движения частиц, при этом записанный сигнал датчика давления имеет ширину полосы частот, включающую первый частотный диапазон и второй частотный диапазон, причем первый частотный диапазон находится на более низких частотах по сравнению с частотами второго частотного диапазона, а записанный сигнал датчика движения частиц имеет ширину полосы частот, включающую, по меньшей мере, второй частотный диапазон. Способ включает расчет сигнала датчика движения частиц в первом частотном диапазоне по записанному сигналу датчика давления, посредством которого формируется модельный сигнал датчика движения частиц в первом частотном диапазоне; совмещение модельного сигнала датчика движения частиц только в нервом частотном диапазоне с сигналом датчика движения частиц, записанным во втором частотном диапазоне,для формирования совмещенного сигнала датчика движения частиц, имеющего, по существу, такую же ширину полосы частот, как ширина полосы частот записанного сигнала датчика давления, и объединения записанного сигнала датчика давления и совмещенного сигнала датчика движения частиц для дальнейшей обработки. Настоящее изобретение представляет собой способ ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков путем объединения сигналов датчиков давления и сигналов датчиков вертикальной скорости. Конкретно, изобретение представляет собой способ определения той комбинации измеренного и прогнозного сигналов, например, полученных с помощью описанного выше процесса замены низких частот, которая может дать наилучшую последующую оценку разложенного на компоненты волнового поля. В общем случае, изобретение определяет лучшую комбинацию путем рассмотрения ошибочных членов в исходных измерениях и нахождения комбинации, которая минимизирует функцию затрат, представляющую прогнозную ошибку в волновом поле восходящих (или падающих) волн. В конкретном варианте осуществления, где помехи будут представлять собой единственный источник ошибки, помехи при измерении будут рассматриваться в качестве дисперсионного члена, а функцию затрат находят при помощи соответствующей комбинации этих дисперсий. В настоящем изобретении используются объединенные сигналы датчиков давления (как правило,гидрофонов) и датчиков вертикальной скорости (как правило, геофонов), расположенных в сейсмических косах. Объединенные сигналы могут затем использоваться для формирования восходящих и падающих компонент волнового поля, которые полезны при дальнейшей обработке сейсмических данных, такой как ослабление кратных волн в морских сейсмических данных. Поскольку записанный сигнал вертикальной скорости часто бывает засорен низкочастотными помехами, вызванными вибрациями, характерными для буксируемой сейсмической косы, отношение сигнал-помеха для объединенных сигналов будет низким. Сигнал вертикальной скорости можно рассчитать по сигналу датчика давления в заданном частотном диапазоне, если спектр сигнала датчика давления имеет удовлетворительное отношение сигналпомеха в пределах данного частотного диапазона (и не имеет вырезов в пределах данного частотного диапазона) и если глубина расположения датчиков давления и вертикальной скорости известна. Если глубина расположения датчиков неизвестна, ее можно рассчитать по частоте вырезов в спектре, внесенных отражением от поверхности - этот способ хорошо известен специалистам. Низкочастотную часть сигнала вертикальной скорости, как правило, приходится заменять в связи с тем, что она обладает низким отношением сигнал-помеха. Соответствующая часть сигнала датчика давления, применяемая для расчета сигнала движения частиц, как правило, обладает хорошим отношением сигнал-помеха в этом низкочастотном диапазоне. Поэтому глубина расположения датчика давления предпочтительно выбирается таким образом, чтобы частота первого выреза в спектре сигнала датчика давления, вызванного отражением от поверхности, была выше, чем низкочастотный диапазон, в котором рассчитывается и заменяется сигнал вертикальной скорости. Способ настоящего изобретения, в частности, полезен для буксируемых морских сейсмических кос,поскольку создаваемая буксируемой сейсмической косой вибрация добавляет значительное количество помех к сигналу датчика движения частиц. Таким образом, способ настоящего изобретения будет проиллюстрирован на примере буксируемых сейсмических кос. В способе настоящего изобретения используются датчики давления, чувствительные к изменениям давления в среде, с которой связаны датчики давления. Такой средой, как правило, является вода. Исключительно в целях наглядности, способ настоящего изобретения будет иллюстрироваться на примере использования гидрофонов, но это не ограничивает объем настоящего изобретения. В способе настоящего изобретения используются датчики движения частиц, чувствительные к движениям частиц в воде, с которой связаны датчики движения. В общем случае, датчики движения частиц могут быть чувствительны к смещению частиц, скорости частиц или ускорению частиц в среде. В настоящем изобретении предпочтение отдается датчикам скорости частиц. Таким образом, если используются датчики движения, чувствительные к положению, то позиционный сигнал предпочтительно дифференцируется для преобразования в сигнал скорости с помощью вычислительных средств, хорошо известных специалистам. Если используются датчики движения, чувствительные к ускорению (как правило,называемые акселерометрами), то сигнал ускорения предпочтительно интерируется для преобразования в сигнал скорости с помощью вычислительных средств, хорошо известных специалистам. В альтернативном варианте осуществления настоящего изобретения в сейсмическом кабеле применяются многокомпонентные датчики движения. Исключительно в целях наглядности, данный вариант осуществления изобретения будет иллюстрироваться на примере использования геофонов, но это не ограничивает объем настоящего изобретения. В конкретном примере трехкомпонентного геофона, этот геофон устанавливается таким образом, чтобы воспринимать скорость частиц в вертикальном направлении. Такой геофон называется вертикальным геофоном. Два геофона устанавливаются в ортогональных направлениях по отношению друг к другу и к вертикально установленному геофону так, чтобы воспринимать горизонтальное движение. Как правило,трехкомпонентный геофон ориентирован так, чтобы воспринимать движение в вертикальном, продольном и поперечном направлениях. Позиционирование таких геофонов в этих трех направлениях позволяет регистрировать направление распространения поступающего сигнала. Оно также позволяет регистрировать вибрацию или другое механическое поведение сейсмического кабеля. В целях наглядности, способ настоящего изобретения будет иллюстрироваться на примере использования вертикальных геофонов, но это не ограничивает объем настоящего изобретения. В ходе дальнейшего обсуждения способ настоящего изобретения будет иллюстрироваться со ссылкой на блок-схемы, представленные на фиг. 1-5. На фиг. 1 и 2 представлены блок-схемы, иллюстрирующие два варианта осуществления изобретения для ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков. На фиг. 3-5 представлены блок-схемы, дополнительно иллюстрирующие конкретные варианты осуществления изобретения, обсуждаемые со ссылкой на блок-схему,представленную на фиг. 2. Только для наглядности дальнейшее обсуждение будет вестись применительно к двухмерной (2D) частотно-волновочисленной (-kx) области, где 2D относится к двум пространственным осям координат, х и z. Такой выбор областей не ограничивает объем настоящего изобретения. Конкретно, обобщение на случай 3D частотно-волновочисленной (-kx-ky) области не вызывает затруднений и будет отмечено в соответствующих местах в ходе дальнейшего обсуждения. На фиг. 1 представлена блок-схема, иллюстрирующая первый вариант осуществления изобретения для ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков путем объединения сигналов датчиков давления и сигналов датчиков вертикальной скорости. В блоке 11 расчетный сигнал вертикальной скорости Vzcal определяется только по записанному сигналу датчика давления Prec. Расчетный сигнал датчика вертикальной скорости Vzcal предпочтительно рассчитывается в зашумленной низкочастотной части записанного сигнала датчика вертикальной скоростиVzrec. В блоке 12 построенный сигнал датчика вертикальной скорости Vzcon определяется как линейная комбинация расчетного сигнала датчика вертикальной скорости Vzcal в блоке 11 и записанного сигнала датчика вертикальной скорости Vzrec с использованием коэффициента смеси . В предпочтительном варианте осуществления построенный сигнал датчика вертикальной скорости Vzcon определяется по такому способу, как процесс замены низких частот, описанный выше при обсуждении патента СШАUS 7359283 В 2. В блоке 13 восходящая компонента волнового поля давления Pup определяется как половина разности записанного сигнала датчика давления Prec и построенного сигнала датчика вертикальной скоростиVzcon из блока 12 в качестве функции коэффициента смеси . В блоке 14 ошибки в записанном сигнале датчика давления Prec и построенном сигнале датчика вертикальной скорости Vzcon из блока 13 распространяются для определения ошибок в восходящей компоненте волнового поля давления Pup. В блоке 15 определяется значение коэффициента смеси , которое минимизирует ошибку в восходящей компоненте волнового поля давления Pup в блоке 14. На фиг. 2 представлена блок-схема, иллюстрирующая второй вариант осуществления изобретения для ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков путем объединения сигналов датчиков давления и сигналов датчиков вертикальной скорости. В блоке 21 определяется глубина расположения приемника zR. Глубина расположения приемника zR может быть определена с помощью любых средств, известных специалистам, например, с помощью датчика глубины или посредством расчета. В блоке 22 записанный (измеренный) суммарный сигнал датчика давления Prec и записанный (измеренный) суммарный сигнал датчика вертикальной скорости Vzrec получают при глубине расположения приемника, определенной в блоке 21. В одном варианте осуществления записанный сигнал датчика давления Prec и записанный сигнал датчика вертикальной скорости Vzrec получают с помощью связанных пар(групп) датчиков давления и датчиков вертикальной скорости, буксируемых в морской сейсмической косе. Как правило, датчики давления представляют собой гидрофоны, а датчики вертикальной скорости вертикальные геофоны, однако выбор датчиков не следует рассматривать в качестве ограничения настоящего изобретения. В блоке 23 расчетный сигнал датчика вертикальной скорости Vzcal определяется по записанному-5 022172 сигналу датчика давления Prec, полученному в блоке 22. Расчетный сигнал вертикальной скорости Vzcal может быть представлен в двухмерном случае уравнением: где F представляет собой коэффициент, обеспечивающий эквивалентность волновой формы члена,представляющего сигнал датчика давления в правой части 5 уравнения (1), сигналу датчика вертикальной скорости в левой части уравнения (2). Расчетный 2D сигнал вертикальной скорости Vzcal в уравнении (2) можно также представить в трехмерном случае уравнением: Конкретный способ определения расчетного сигнала вертикальной скорости Vzcal, включая конкретное выражение для коэффициента F, иллюстрируется в ходе обсуждения со ссылкой на блок-схему,представленную ниже на фиг. 3. В блоке 24 построенный сигнал датчика вертикальной скорости Vzcon определяется по записанному сигналу датчика вертикальной скорости Vzrec, полученному в блоке 22, и расчетному сигналу вертикальной скорости Vzcal, определенному в блоке 23 по записанному сигналу датчика давления prec, полученному в блоке 22. В одном варианте осуществления построенный сигнал вертикальной скорости Vzcon определяется как линейная комбинация записанного сигнала датчика вертикальной скорости Vzrec и расчетного сигнала датчика вертикальной скорости Vzcal с использованием коэффициента смесив качестве константы пропорциональности между двумя сигналам датчиков. Построенный сигнал вертикальной скорости Vzcon в двухмерном случае может быть представлен уравнением: с использованием уравнения (1) во второй строке. Аналогичным образом, построенный 2D сигнал вертикальной скорости Vzcon в уравнении (2) можно представить в трехмерном случае следующим выражением: Конкретный способ определения построенного сигнала вертикальной скорости Vzcon иллюстрируется в ходе обсуждения со ссылкой на блок-схему, представленную ниже на фиг. 3. В блоке 25 волновое поле давления разлагается на восходящую и падающую компоненты волнового поля. В одном варианте осуществления разложение волнового поля давления определяется путем расчета восходящей компоненты волнового поля давления Pup как половины разности записанного сигнала датчика давления Prec из блока 22 и построенного сигнала вертикальной скорости Vzcon из блока 24. Восходящая компонента волнового поля давления Pup также является функцией коэффициента смесииз блока 24. Конкретный вариант осуществления для определения восходящей компоненты волнового поля давления Pup иллюстрируется в ходе обсуждения со ссылкой на блок-схему, представленную ниже на фиг. 4. В блоке 26 восходящая компонента волнового поля давления Pup переформулируется как функция записанного сигнала датчика давления Prec из блока 22, записанного сигнала датчика вертикальной скорости Vzrec из блока 22 и коэффициента смесииз блока 24. Это переформулирование более подробно обсуждается ниже со ссылкой на блок-схему, представленную на фиг. 5. В блоке 27 ошибки в членах, представляющих переформулированный сигнал датчика давления и записанный сигнал датчика вертикальной скорости из блока 26, распространяются для определения ошибок в восходящей компоненте волнового поля давления Pup. Это распространение более подробно обсуждается ниже со ссылкой на блок-схему, представленную на фиг. 5. В блоке 28 определяется значение коэффициента смеси , которое минимизирует ошибку в восходящей компоненте волнового поля давления Pup в блоке 27. Конкретный вариант осуществления для определения значения коэффициента смеси , которое минимизирует ошибку для случая, когда помехи при измерении служат единственным источником ошибок, иллюстрируется в ходе дальнейшей дискуссии со ссылкой на блок-схему, представленную ниже на фиг. 5. Этот конкретный вариант осуществления дополняет обсуждение в блоках 26-28 выше. В блоке 29 восходящая компонента волнового поля давления Pup в блоке 27 пересчитывается с определенным значением коэффициента смесииз блока 28, которое минимизирует ошибку. На фиг. 3 представлена блок-схема, иллюстрирующая один способ для определения расчетного сигнала вертикальной скорости Vzcal. Ссылка на этот конкретный способ была приведена выше в блоках 23 и 24 на фиг. 2. Этот способ аналогичен способу, описанному в патенте СШАUS 7359283 В 2, который обсуждался выше. В блоке 31 получают записанный сигнал датчика давления Prec и записанный сигнал датчика верти-6 022172 кальной скорости Vzrec. В этом конкретном иллюстрируемом двухмерном варианте осуществления записанный сигнал датчика давления Prec(kx,zR,) и записанный сигнал датчика вертикальной скоростиVzrec(kx,zR,) представлены в виде горизонтального волнового числа kx, заданной глубины расположения приемника zR и временной круговой частоты . В блоке 32 получают плотностьсреды распространения. Для буксируемой морской сейсмической косы такой средой будет вода. В блоке 33 вертикальное волновое число kz падающей сейсмической волны определяют для распространения в продольной вертикальной плоскости (х, z) таким образом, что где с представляет собой скорость распространения сейсмической волны в среде. Двухмерный случай, выраженный уравнением (3), представляет собой случай ky = 0 более общего трехмерного случая,заданного уравнением: В блоке 34 определяется функция волны-спутника давления gp. В этом конкретном иллюстрируемом варианте осуществления функция волны-спутника давления gp представлена в виде функции kz и zR с помощью уравнения В блоке 35 определяется функция волны-спутника вертикальной скорости gvz. В этом конкретном иллюстрируемом варианте осуществления функция волны-спутника вертикальной скорости gvz представлена в виде функции kz и zR с помощью уравнения: В блоке 36 определяют сигнал вертикальной скорости Vzcal. В этом конкретном иллюстрируемом варианте осуществления расчетный сигнал вертикальной скорости Vzcal определяют с использованием плотностииз блока 32, вертикального волнового числа kz из блока 33, функции волны-спутника давления gp из блока 34 и функции волны-спутника вертикальной скорости gvz из блока 35. Расчетный сигнал вертикальной скорости Vzcal для двухмерного случая задан уравнением: Уравнение (6) представляет собой конкретный вариант осуществления уравнения (1) для конкретного значения коэффициента F. Трехмерная версия уравнения (6) задана следующим уравнением: в правой части уравнения (6) Коэффициент, заданный отношением функций волн-спутников обеспечивает, чтобы правосторонний член, хотя и основанный на сигнале датчика давления, был эквивалентен в волновой форме левой части уравнения (6), которая основана на сигнале датчика вертикальной скорости. В блоке 37 построенный сигнал вертикальной скорости Vzcon определяется как линейная комбинация записанного сигнала датчика давления Prec из блока 31 и рассчитанного сигнала вертикальной скорости Vzcal из блока 36 с использованием коэффициента смеси . В конкретном иллюстрируемом варианте осуществления построенный сигнал вертикальной скорости Vzcon определяется с использованием уравнения (6) и для двухмерного случая задан следующим уравнением: Уравнение (7) представляет собой конкретный вариант осуществления уравнения (2). Трехмерная версия уравнения (7) задана следующим уравнением: На фиг. 4 представлена блок-схема, иллюстрирующая вариант осуществления настоящего изобретения для определения восходящей компоненты волнового поля давления. На данный конкретный вариант осуществления имеется ссылка в блоке 24 на фиг. 2. В блоке 41 получают записанный сигнал датчика давления Prec. В этом конкретном иллюстрируемом варианте осуществления сигнал датчика давления Prec(kx,zR,) представлен в виде горизонтального волнового числа kx, заданной глубины расположения приемника zR временной круговой частоты . В блоке 42 получают построенный сигнал датчика вертикальной скорости Vzcon. В этом конкретном иллюстрируемом варианте осуществления построенный сигнал вертикальной скорости Vzcon(kx,zR,) представлен в виде горизонтального волнового числа kx, глубины расположения приемника zR и временной круговой частоты . Конкретный вариант осуществления построенного сигнала вертикальной ско-7 022172 рости Vzcon иллюстрируется в ходе обсуждения со ссылкой на блок-схему, представленную выше на фиг. 3. В блоке 43 получают плотностьсреды распространения. Для буксируемой морской сейсмической косы такой средой будет вода. В блоке 44 вертикальное волновое число kz определяется для распространения в продольной вертикальной (х, z) плоскости таким образом, что уравнение (3) справедливо (как в блоке 33 на фиг. 3). В блоке 45 восходящая компонента волнового поля давления Pup определяется как половина разности записанного сигнала датчика давления Prec из блока 41 и построенного сигнала датчика вертикальной скорости Vzcon из блока 42. В этом конкретном иллюстрируемом варианте осуществления восходящая компонента волнового поля давления Pup определяется с использованием плотностииз блока 43 и вертикального волнового числа kz из блока 44; и задается следующим уравнением: Трехмерная версия уравнения (8) задана следующим уравнением: Падающую компоненту волнового поля давления Pdown и восходящую и падающую компоненты волнового поля вертикальной скорости Vzup и Vzdown соответственно можно также получить с помощью выражений, аналогичных уравнению (8). Изобретение в равной степени применимо к определению любых из этих результатов процесса разложения на компоненты. Использование восходящей компоненты волнового поля давления Pup представлено здесь только для целей иллюстрации и не ограничивает настоящее изобретение. На фиг. 5 представлена блок-схема, иллюстрирующая вариант осуществления настоящего изобретения для определения значения коэффициента смеси, которое минимизирует ошибку. На данный конкретный вариант осуществления имеется ссылка в блоках 26-28 на фиг. 2. В блоке 51 восходящая компонента волнового поля давления Pup переформулируется в виде записанного сигнала датчика давления Prec, записанного сигнала датчика вертикальной скорости Vzrec и коэффициента смеси . В этом конкретном варианте осуществления переформулирование выполняется путем подстановки уравнения (7) в уравнение (8) и сокращения двухмерных параметров (kx, zR, ) или трехмерных параметров (kx, ky, zR, ). Эта подстановка приводит к следующему уравнению: Настоящее изобретение включает распространение ошибок в любых членах в правой стороне уравнения (9) для нахождения результирующей ошибки в оцениваемом разложенном на компоненты волновом поле давления восходящих волн Pup с последующей оптимизацией этой оценки путем регулирования коэффициента смесидля достижения наименьшей результирующей ошибки. Изобретение не ограничивается уравнением (9) и включает также использование функционально аналогичных уравнений, вытекающих из различных вариантов реализации ослабления низкочастотных помех и разложения волновых полей. Например, систематическая ошибка в отношении функций волн-спутников может возникать,если топография морской поверхности или глубина расположения приемников неравномерны по оси х, и функции волн-спутников не могут быть адекватно представлены уравнениями (4) и (5), или если падающая сейсмическая волна включает ненулевую компоненту ky, перпендикулярную сейсмической косе так,что точное значение kz нельзя получить из уравнения (3). Наличие этих или других ошибок может сделать каждый из членов, представляющих записанный сигнал датчика Prec или Vzrec, более или менее желательным в уравнении (7), при этом смесь, при которой достигается минимальная результирующая ошибка при разложении может быть получена путем регулирования коэффициента смесисоответственно для заданного значенияи kx. В блоке 52 ошибки в членах в правой части уравнения (9) распространяются для определения ошибок в восходящей компоненте волнового поля давления Pup в левой части уравнения (9) в блоке 51. В этом конкретном варианте осуществления, когда помехи при измерении служат единственным источником ошибок, помехи рассматриваются в качестве дисперсий в каждом члене уравнения (9). Такая обработка помех приводит к следующему уравнению: где Var[] обозначает дисперсию. В блоке 53 определяется значение коэффициента смеси , которое минимизирует дисперсию вос-8 022172 ходящей компоненты волнового поля давления Var[Pup] в левой части уравнения (10) в блоке 52. Перегруппировка членов уравнения (10), дифференцирование по коэффициенту смесии приравнивание величины к нулю дает такое значение , которое обеспечивает минимум Vr[Pup] В блоке 54 коэффициент смесиоценивается путем подстановки следующей формы для уравнения где N[] обозначает среднеквадратичный уровень помех, полученный из записи белого шума или путем оценки на основе данных. Здесь Vzrec представляет собой записанный сигнал датчика вертикальной скорости, a Vzcal - эквивалентный сигнал датчика вертикальной скорости, полностью полученный путем расчета (подавление волн-спутников, или очистка от ложных отражений от плоской морской поверхности) по сигналу датчика давления. На практике уравнение (12) представляет собой наиболее просто реализуемую процедуру для оценки уравнения (11). На фиг. 6-10 представлены графики соответствующих сигналов и помех, иллюстрирующие конкретные процессы, представленные блок-схемами на фиг. 1-5. В частности, фиг. 6-10 иллюстрируют конкретный случай, когда помехи при измерении служат единственным источником ошибок. На фиг. 6 представлен график сигнала и помех для записанных сигналов датчика давления и датчика вертикальной скорости. Конкретно, на фиг. 6 представлены сигналы для записанного сигнала датчика давления Prec 61 (штрихпунктирная линия) и записанного сигнала датчика вертикальной скорости Vzrec 62(пунктирная линия) и помехи для записанного сигнала датчика давления Prec 63 (сплошная линия) и записанного сигнала датчика вертикальной скорости Vzrec 64 (штриховая линия). Сигналы 61, 62 и помехи 63,64 для обоих датчиков показаны записанными при вертикальном падении сейсмической волны и при 0 дБ в качестве уровня отсчета восходящего сигнала на каждом датчике. Для простоты иллюстрирования помехи 63 на сигнале Prec определяются при постоянном уровне -12 дБ, а помехи 64 на сигнале Vzrec определяются при -6 дБ на всех частотах. На практике помехи 64 на Vzrec будут возрастать в направлении 0 Гц, а процесс замены низких частот будет действовать, главным образом, в области ниже второго выреза волны-спутника Prec 65,который находится на частоте приблизительно 50 Гц при глубине записи 15 м. На фиг. 7 представлен график коэффициента смеси 71 (сплошная линия), определенный по способу настоящего изобретения для сценария помех, который иллюстрируется на фиг. 6. Конкретно, оптимальный коэффициент смесиопределяется путем применения уравнения (12). Когда коэффициент смеси= 0, сигнал Vzcon будет полностью состоять из Vzrec. Когда коэффициент смеси= 1, сигнал Vzcon будет полностью состоять из Vzcal, эквивалентного сигнала и помех, построенных по Prec. На фиг. 8 представлен график построенного сигнала вертикальной скорости Vzcon 81 (штрихпунктирная линия), представляющий собой сумму двух составляющих сигналов, вносимых от записанных сигналов датчика вертикальной скорости и датчика давления. На нем также показаны две отдельные составляющие помех, вносимых в Vzcon от записанного сигнала датчика вертикальной скорости Vzrec 82(пунктирная линия) и записанного сигнала датчика давления Prec 83 (сплошная линия). Аналогичным образом, на фиг. 9 представлен график восходящей компоненты волнового поля давления Pup 91 (штрихпунктирная линия), представляющий собой сумму двух составляющих сигналов,вносимых от записанных сигналов датчика вертикальной скорости и датчика давления. На нем также показаны две отдельные составляющие помех, вносимых в Pup от записанного сигнала датчика вертикальной скорости Vzrec 92 (пунктирная линия) и записанного сигнала датчика давления Prec 93 (сплошная линия). Представляющий помехи член 93 сигнала Frec включает часть сигнала Vzcon, который поступает от сигнала Prec, прежде чем Prec и Vzcon объединяются, формируя сигнал Pup. На фиг. 10 представлен график сигнала 101 (штрихпунктирная линия) и помехи для восходящей компоненты волнового поля давления Pup по трем расчетам коэффициента смеси . Суммарные помехиPup показаны для коэффициента смеси , рассчитанного по способу настоящего изобретения 102 (сплошная линия) и представленного выше на фиг. 7. Для сравнения помехи Pup показаны также для двух других несколько субоптимальных расчетов. В одном расчете 103 (штриховая линия) помехи Vzcon в знаменателе уравнений (11) и (12) умножены на два, чтобы получить меньшее значение , тогда как в другом расчете 104 (пунктирная линия) помехи Vzcon разделены на два, чтобы получить большее значение . Значение ,полученное по способу изобретения 102, дает наименьшие помехи на всех частотах. В настоящем изобретении полученный коэффициентможет использоваться не только для опре-9 022172 деления оптимальной комбинации измерений по каждому датчику, но и в качестве инструмента анализа относительной значимости помех и других источников ошибки при ослаблении низкочастотных помех и разложении волнового поля. Изобретение может также применять одну и ту же процедуру распространения ошибки и оптимизации к другим вариантам осуществления, например, в различных областях и в двух или трех измерениях. Изобретение далее включает любые другие аппроксимации общего случая,продемонстрированные выше, например, посредством учета только определенных источников ошибки,или путем принятия вертикальных или ограниченных углов падения таким образом, чтобы полученное значениебыло функцией только , но не kx. Следует понимать, что изложенное выше представляет собой только подробное описание конкретных вариантов осуществления настоящего изобретения и что многочисленные изменения, модификации и варианты осуществления, альтернативные изложенным, могут быть выполнены в соответствии с раскрытым изобретением без выхода за его рамки. Поэтому предшествующее описание не ограничивает объем настоящего изобретения. Объем изобретения определяется только прилагаемой формулой изобретения и ее эквивалентами. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков, включающий следующие шаги: определяют расчетный сигнал датчика вертикальной скорости путем умножения записанного сигнала датчика давления на вертикальное волновое число и функцию волны-спутника вертикальной скорости и путем деления на круговую частоту, плотность среды распространения и функцию волны-спутника давления; определяют построенный сигнал датчика вертикальной скорости как линейную комбинацию расчетного сигнала датчика вертикальной скорости, помноженного на коэффициент смеси, и записанного сигнала датчика вертикальной скорости, помноженного на единицу за вычетом коэффициента смеси; определяют восходящую компоненту волнового поля давления как половину разности записанного сигнала датчика давления и построенного сигнала датчика вертикальной скорости, помноженного на круговую частоту и плотность среды распространения и деленного на вертикальное волновое число; определяют дисперсию в восходящей компоненте волнового поля давления путем распространения дисперсии в записанном сигнале датчика давления и дисперсии в записанном сигнале датчика вертикальной скорости, причем эти дисперсии представляют помехи; определяют значение коэффициента смеси, которое минимизирует дисперсию в восходящей компоненте волнового поля давления, как среднеквадратичный уровень помех записанного сигнала датчика вертикальной скорости, деленный на сумму среднеквадратичного уровня помех записанного сигнала датчика вертикальной скорости и среднеквадратичного уровня помех расчетного сигнала датчика вертикальной скорости; ослабляют низкочастотные помехи в построенном сигнале датчика вертикальной скорости и волновом поле давления восходящих волн путем подстановки значения коэффициента смеси в построенный сигнал датчика вертикальной скорости. 2. Способ по п.1, отличающийся тем, что определение расчетного сигнала датчика вертикальной скорости первоначально включает следующие шаги: определяют глубину расположения приемника и получают записанный сигнал датчика давления и записанный сигнал датчика вертикальной скорости на глубине расположения приемника. 3. Способ по п.1, отличающийся тем, что датчики давления содержат гидрофоны. 4. Способ по п.1, отличающийся тем, что датчики вертикальной скорости содержат вертикальные геофоны. 5. Способ по п.2, отличающийся тем, что определение расчетного сигнала датчика вертикальной скорости далее включает следующие шаги: получают плотность среды распространения; определяют вертикальное волновое число по временной круговой частоте, скорости распространения в среде и горизонтальному волновому числу; определяют функцию волны-спутника давления по вертикальному волновому числу и глубине расположения приемника; определяют функцию волны-спутника вертикальной скорости по вертикальному волновому числу и глубине расположения приемника и определяют расчетный сигнал датчика вертикальной скорости с помощью плотности, вертикального волнового числа, функции волны-спутника давления и функции волны-спутника вертикальной скорости. 6. Способ по п.5, отличающийся тем, что вертикальное волновое число kz определяют в двухмерном случае, применяя следующее уравнение: гдепредставляет собой временную круговую частоту,с - скорость распространения сейсмической волны в среде, аkx - горизонтальное волновое число в продольном направлении. 7. Способ по п.5, отличающийся тем, что вертикальное волновое число kz определяют в трехмерном случае, применяя следующее уравнение: гдепредставляет собой временную круговую частоту,с - скорость распространения сейсмической волны в среде,kx - горизонтальное волновое число в продольном направлении, аky - горизонтальное волновое число в поперечном направлении. 8. Способ по п.6, отличающийся тем, что функцию волны-спутника давления gp определяют, применяя следующее уравнение: где kz представляет собой вертикальное волновое число, azR - глубина расположения приемника. 9. Способ по п.8, отличающийся тем, что функцию волны-спутника вертикальной скорости gvz определяют, применяя следующее уравнение: 10. Способ по п.9, отличающийся тем, что определение построенного сигнала датчика вертикальной скорости Vzcon включает применение следующего уравнения: где а представляет собой коэффициент смеси,Vzrec - записанный сигнал датчика вертикальной скорости, аPrec - записанный сигнал датчика давления. 11. Способ по п.10, отличающийся тем, что определение восходящей компоненты волнового поля давления включает использование плотности и вертикального волнового числа. 12. Способ по п.11, отличающийся тем, что определение восходящей компоненты волнового поля давления Pup включает применение следующего уравнения: где Prec представляет собой записанный сигнал датчика давления, aVzcon - построенный сигнал датчика вертикальной скорости. 13. Способ по п.1, отличающийся тем, что определение ошибки в восходящей компоненте волнового поля давления включает следующие шаги: переформулируют восходящую компоненту волнового поля давления в виде записанного сигнала датчика давления, записанного сигнала датчика вертикальной скорости и коэффициента смеси; распространяют ошибки в членах, представляющих записанный сигнал датчика давления и записанный сигнал датчика вертикальной скорости, для получения дисперсий в членах, представляющих восходящую компоненту волнового поля давления, записанный сигнал датчика давления и записанный сигнал датчика вертикальной скорости; дифференцируют дисперсии по коэффициенту смеси и определяют значение коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления, приравнивая производную дисперсии восходящей компоненты волнового поля давления к нулю. 14. Способ по п.13, отличающийся тем, что переформулирование восходящей компоненты волнового поля давления включает применение следующего уравнения: 15. Способ по п.14, отличающийся тем, что распространение ошибок для получения дисперсий включает применение следующего уравнения: где Var[] обозначает дисперсию. 16. Способ по п.15, отличающийся тем, что определение значения коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления, включает применение сле- 11022172 17. Способ по п.16, отличающийся тем, что определение значения коэффициента смеси, которое минимизирует ошибку в восходящей компоненте волнового поля давления, включает применение следующего уравнения: где N[] обозначает среднеквадратичный уровень помех,Vzrec - записанный сигнал датчика вертикальной скорости, aVzcal - эквивалентный сигнал датчика вертикальной скорости, полученный путем очистки сигнала датчика давления от ложных отражений от плоской морской поверхности. 18. Способ ослабления низкочастотных помех в данных сейсмической косы с двумя типами датчиков, включающий следующие шаги: определяют расчетный сигнал датчика вертикальной скорости путем умножения записанного сигнала датчика давления на вертикальное волновое число и функцию волны-спутника вертикальной скорости и путем деления на круговую частоту, плотность среды распространения и функцию волны-спутника давления; определяют построенный сигнал датчика вертикальной скорости как линейную комбинацию расчетного сигнала датчика вертикальной скорости, помноженного на коэффициент смеси, и записанного сигнала датчика вертикальной скорости, помноженного на единицу за вычетом коэффициента смеси; определяют падающую компоненту волнового поля давления как половину суммы записанного сигнала датчика давления и построенного сигнала датчика вертикальной скорости, помноженного на круговую частоту и плотность среды распространения и деленного на вертикальное волновое число; определяют дисперсию в падающей компоненте волнового поля давления путем распространения дисперсии в записанном сигнале датчика давления и дисперсии в записанном сигнале датчика вертикальной скорости, причем эти дисперсии представляют помехи; определяют значение коэффициента смеси, которое минимизирует дисперсию в падающей компоненте волнового поля давления, как среднеквадратичный уровень помех записанного сигнала датчика вертикальной скорости, деленный на сумму среднеквадратичного уровня помех записанного сигнала датчика вертикальной скорости и среднеквадратичного уровня помех расчетного сигнала датчика вертикальной скорости; ослабляют низкочастотные помехи в построенном сигнале датчика вертикальной скорости и волновом поле давления падающих волн путем подстановки значения коэффициента смеси в построенный сигнал датчика вертикальной скорости.
МПК / Метки
МПК: G01V 1/38
Метки: низкочастотных, косы, сейсмической, морской, датчиков, двумя, ослабления, типами, способ, данных, помех
Код ссылки
<a href="https://eas.patents.su/17-22172-sposob-oslableniya-nizkochastotnyh-pomeh-v-dannyh-morskojj-sejjsmicheskojj-kosy-s-dvumya-tipami-datchikov.html" rel="bookmark" title="База патентов Евразийского Союза">Способ ослабления низкочастотных помех в данных морской сейсмической косы с двумя типами датчиков</a>
Способ предсказания кратных волн, связанных с поверхностью, на основе данных буксируемой морской сейсмической косы с двумя типами датчиков
Номер патента: 12636
Опубликовано: 30.12.2009
Автор: Зёлльнер Вальтер
МПК: G01V 1/28
Метки: предсказания, кратных, поверхностью, двумя, основе, датчиков, буксируемой, морской, данных, связанных, волн, сейсмической, косы, типами, способ
Формула / Реферат:
1. Способ обработки сейсмических данных, полученных посредством буксируемой морской сейсмической косы, содержащей датчики движения сейсмической массы и датчики давления, состоящий в том, что комбинируют сигналы датчиков движения сейсмической массы и сигналы датчиков давления для образования восходящей составляющей волнового поля давления и падающей составляющей волнового поля движения сейсмической массы; экстраполируют падающую составляющую...
Групповая структура датчиков для морской сейсмической косы с двумя типами датчиков и способ сейсморазведки
Номер патента: 18827
Опубликовано: 29.11.2013
Автор: Тенгамн Стиг Руне Леннарт
МПК: G01V 1/38
Метки: датчиков, двумя, сейсмической, способ, структура, морской, сейсморазведки, групповая, типами, косы
Формула / Реферат:
1. Способ морской сейсморазведки, включающий следующие шаги:буксируют по меньшей мере одну сейсмическую косу в водоеме, при этом сейсмическая коса включает ряд пространственно разнесенных групп датчиков, каждая из которых включает ряд пространственно разнесенных в продольном направлении датчиков, реагирующих на движение частиц;регистрируют сигналы каждым из датчиков, реагирующих на движение частиц, в ответ на активацию сейсмоисточника;суммируют...
Способ и система для преобразования трехмерных данных буксируемой сейсмической косы с двумя типами датчиков в данные с подавленным шумом
Номер патента: 14279
Опубликовано: 29.10.2010
Автор: Клювер Тилман
Метки: сейсмической, преобразования, типами, способ, система, подавленным, датчиков, шумом, косы, буксируемой, данные, двумя, трехмерных, данных
Формула / Реферат:
1. Способ преобразования трехмерных данных буксируемой сейсмической косы с двумя типами датчиков в данные с подавленным шумом, в которомпреобразуют трехмерные данные буксируемой сейсмической косы с двумя типами датчиков, представляющие подземные образования и полученные группой установленных вблизи поверхности земли сейсмических датчиков, в масштабированные сейсмические данные с подавленным шумом от наложения частот;преобразуют записи давления и...
Способ очистки от ложных отражений данных морской сейсмической косы во всей полосе частот
Номер патента: 18531
Опубликовано: 30.08.2013
Авторы: Рийанти Христина Д., Ван Ден Берг Петер М., Фоккема Якоб Т., Ван Борселен Роальд Дж.
МПК: G01V 1/38, G06F 17/14
Метки: частот, косы, сейсмической, полосе, ложных, отражений, морской, данных, всей, способ, очистки
Формула / Реферат:
1. Способ морской сейсморазведки, включающий следующие шаги:получают и записывают сейсмические данные с помощью морских сейсмических кос, которые отражают характеристики формаций геологической среды, при этом сейсмические данные собирают посредством размещения ряда сейсмоприемников сверху оцениваемой области формаций геологической среды, причем сейсмоприемники формируют электрический и/или оптический сигнал в ответ на сейсмическую...
Способ очистки данных морской сейсмической косы от ложных отражений со стороны источника во всей полосе частот
Номер патента: 21201
Опубликовано: 30.04.2015
Авторы: Ван Борселен Роальд Дж., Пэйдж Кристофер П., Рийанти Христина Д., Ван Ден Берг Петер М., Фоккема Якоб Т.
МПК: G01V 1/32, G01V 1/38, G01V 1/28...
Метки: отражений, сейсмической, ложных, данных, морской, источника, полосе, частот, очистки, всей, косы, способ, стороны
Формула / Реферат:
1. Способ подавления ложных отражений со стороны источника сейсмических сигналов, записанных с помощью морских сейсмических кос, включающий выполнение посредством программируемого компьютера следующих действий:сортируют сейсмические сигналы, записанные с помощью морских сейсмических кос, с целью построения сейсмограммы общей глубинной площадки;используют комплексный частотный параметр по Лапласу для преобразования сейсмических сигналов из...
Следующий патент: Лекарственная форма, содержащая цинеол, способ ее получения и применение
Случайный патент: Устройство и способ прокладки протяженного изделия с судна