Групповая структура датчиков для морской сейсмической косы с двумя типами датчиков и способ сейсморазведки
Формула / Реферат
1. Способ морской сейсморазведки, включающий следующие шаги:
буксируют по меньшей мере одну сейсмическую косу в водоеме, при этом сейсмическая коса включает ряд пространственно разнесенных групп датчиков, каждая из которых включает ряд пространственно разнесенных в продольном направлении датчиков, реагирующих на движение частиц;
регистрируют сигналы каждым из датчиков, реагирующих на движение частиц, в ответ на активацию сейсмоисточника;
суммируют компоненты сигналов реакции на движение в каждой группе, имеющие частоту выше выбранной частоты, для генерирования соответствующих групповых сигналов реакции на движение;
подвергают скоростной фильтрации компоненты сигналов реакции на движение, имеющие частоту ниже выбранной частоты, и объединяют отфильтрованные по скорости сигналы с групповыми сигналами реакции на движение для генерирования сигналов реакции на движение полного диапазона частот, соответствующих каждой группе датчиков.
2. Способ по п.1, отличающийся тем, что скоростная фильтрация включает исключение компонентов сигналов, имеющих скорость ниже скорости звука в воде.
3. Способ по п.1, отличающийся тем, что скоростная фильтрация включает фильтрацию в частотно-волновочисленной области.
4. Способ по п.1, отличающийся тем, что скоростная фильтрация включает фильтрацию в области наклонного суммирования.
5. Способ по п.1, отличающийся тем, что компоненты сигналов реакции на движение, имеющие частоту ниже выбранной частоты, передают на записывающую систему при частоте дискретизации, связанной с выбранной частотой, причем частота дискретизации ниже, чем частота цифровой дискретизации, связанная с верхним пределом представляющего интерес диапазона сейсмических частот.
6. Способ по п.1, отличающийся тем, что выбранная частота связана с частотой помех, вызванных движением при буксировании, в сигналах датчиков, реагирующих на движение частиц.
7. Способ по п.6, отличающийся тем, что выбранная частота равна 20 Гц.
8. Способ по п.1, отличающийся тем, что по меньшей мере одна сейсмическая коса содержит ряд групп датчиков, реагирующих на давление, каждая из которых связана с каждой группой датчиков, реагирующих на движение частиц, причем способ включает следующие шаги: регистрируют сигналы реакции на давление в ответ на активацию сейсмоисточника и объединяют сигналы реакции на давление с сигналами реакции на движение полного диапазона частот для генерации сейсмических сигналов с подавленными волнами-спутниками.
9. Способ по п.1, отличающийся тем, что зарегистрированные сигналы реакции на движение подвергают цифровой дискретизации в сейсмической косе с частотой, соответствующей представляющей интерес максимальной сейсмической частоте, причем сигналы реакции на движение, имеющие частоту ниже выбранной частоты, передают на записывающую систему с частотой дискретизации, связанной с выбранной частотой и более низкой, чем частота цифровой дискретизации.
10. Способ по п.1, отличающийся тем, что компоненты сигналов реакции на движение, имеющие частоту выше выбранной частоты, объединяют в сейсмической косе для генерации соответствующих групповых сигналов реакции на движение, которые передают из сейсмической косы на записывающую систему.

Текст
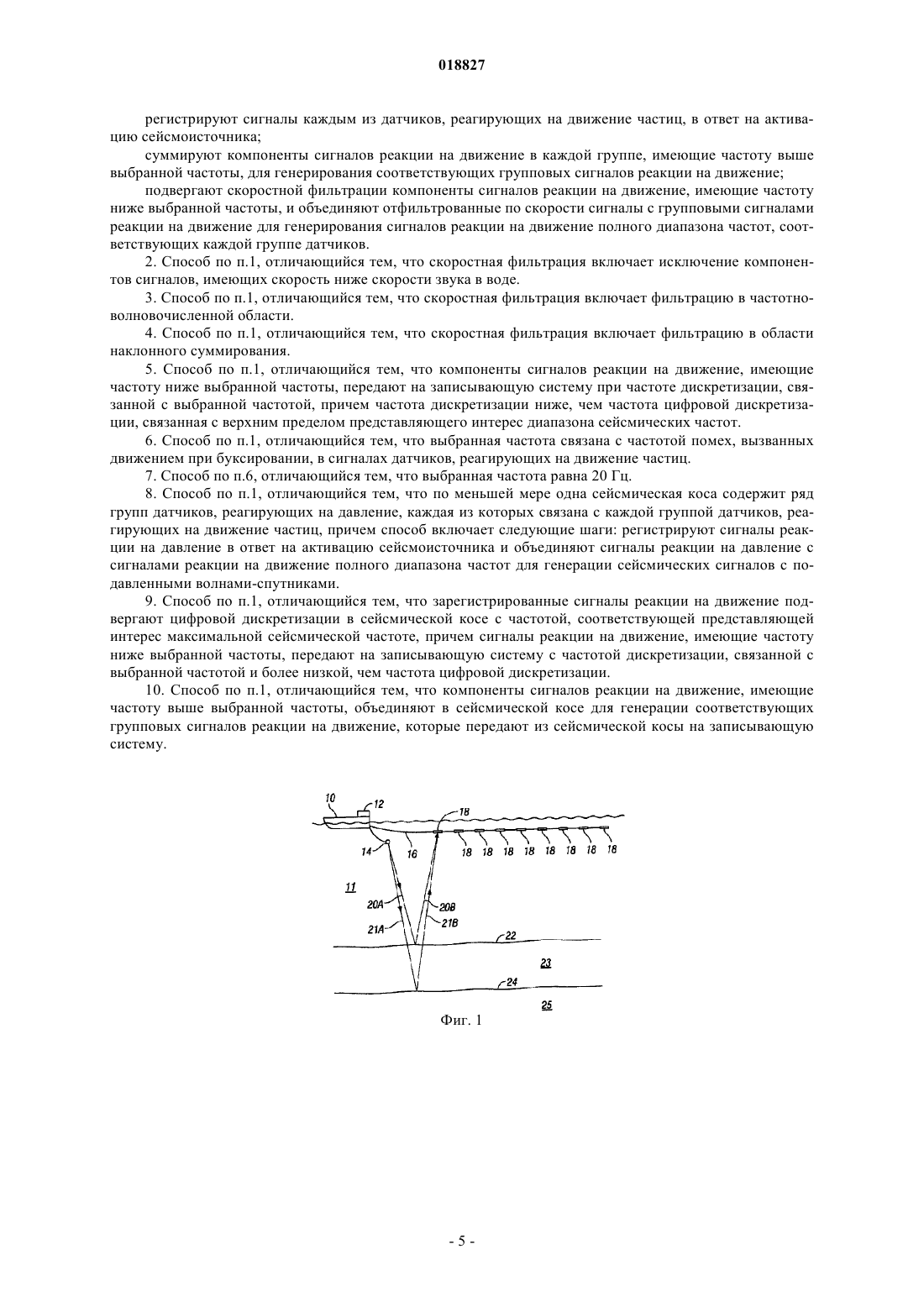
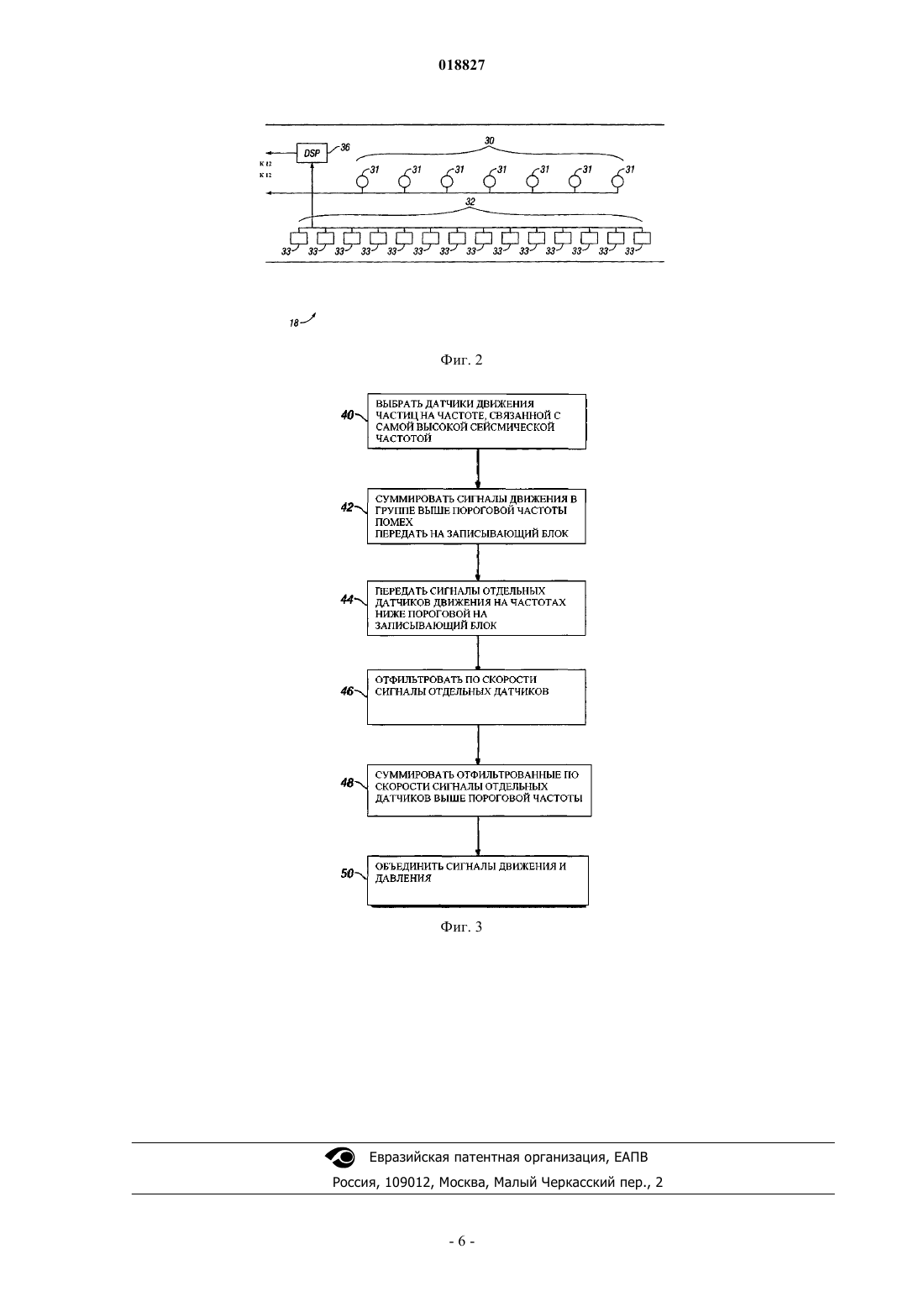
ГРУППОВАЯ СТРУКТУРА ДАТЧИКОВ ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ КОСЫ С ДВУМЯ ТИПАМИ ДАТЧИКОВ И СПОСОБ СЕЙСМОРАЗВЕДКИ Способ морской сейсморазведки включает буксирование сейсмической косы в водоеме. Сейсмическая коса включает ряд пространственно разнесенных групп датчиков, в состав каждой из которых входят датчики, реагирующие на давление, и датчики, реагирующие на движение частиц, пространственно разнесенные в продольном направлении. Сигналы регистрируют каждым из датчиков в ответ на активацию сейсмоисточника. Компоненты оцифрованных сигналов реакции на движение в каждой группе, имеющие частоту выше выбранной частоты, объединяют для генерирования соответствующих групповых сигналов реакции на движение. Компоненты сигналов реакции на движение, имеющие частоту ниже выбранной частоты, подвергают скоростной фильтрации. Отфильтрованные по скорости сигналы объединяют с групповыми сигналами реакции на движение для генерирования сигналов реакции на движение полного диапазона частот,соответствующих каждой группе датчиков. Тенгамн Стиг Руне Леннарт (US) Хмара М.В. (RU)(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) Область техники, к которой относится изобретение Настоящее изобретение в целом относится к области морских сейсморазведочных систем. Конкретнее, изобретение относится к структурам групп датчиков в морских сейсмических косах, включающих датчики движения частиц и датчики давления. Предшествующий уровень техники Морские сейсморазведочные системы, известные специалистам, включают кабели датчиков, называемые "сейсмическими косами" и буксируемыми в водоеме для получения сейсмических сигналов, возникающих в результате активации в выбранные моменты времени одного или нескольких сейсмоисточников в воде. Сейсмические косы включают ряд сейсмических датчиков, расположенных в пространственно разнесенных местах по длине косы. Как правило, датчики организованы в виде ряда пространственно разнесенных групп, или "расстановок", причем в каждой группе или расстановке выбранное количество датчиков расположены на относительно близком расстоянии (например, 0,7 м), а сигналы от всех датчиков в группе объединяются тем или иным способом для генерации сигнала, эквивалентного сигналу от единственного датчика. Группы датчиков могут быть отделены друг от друга относительно более длинным расстоянием (например, 12,5 м) для получения эквивалента сигналов от ряда отдельных датчиков, расположенных в пространственно разнесенных местах по длине сейсмической косы. Групповая структура датчиков и объединение сигналов, как объясняется выше, используются для снижения некоторых типов помех в сигналах, зарегистрированных сейсмическими датчиками. Один тип сейсмической косы, известный специалистам под названием косы "с двумя типами датчиков", включает как датчики, реагирующие на движение частиц (например, геофоны), так и датчики, реагирующие на давление или временной градиент давления (например, гидрофоны), расположенные в существенно связанных группах. Один пример такого типа сейсмической косы раскрыт в патенте США 7239577, выданном Tenghamn и др. и находящемся в совместном владении с настоящим изобретением. Конкретные варианты использования таких сейсмических кос с двумя типами датчиков также описаны в приведенном выше патенте. Специалистам известно, что в сейсмических косах, содержащих датчики движения частиц, включая сейсмические косы с двумя типами датчиков, датчики движения частиц подвержены помехам от движения сейсмических кос в воде. Одна методика обработки сигналов сейсмической косы с двумя типами датчиков, которая учитывает такие помехи, описана в патенте США 7359283, выданном Vaage и др. и находящемся в совместном владении с настоящим изобретением. Способ, описанный в упомянутом выше патенте, включает синтезирование низкочастотных (например, ниже 20 Гц) сигналов движения частиц путем использования сигналов от датчиков, реагирующих на давление, и добавления синтезированных низкочастотных компонентов к результатам измерений, выполненным датчиками движения частиц выше граничной частоты синтезированного сигнала. Сигналы движения частиц, измеренные датчиками движения частиц ниже граничной синтезированной частоты, фактически не используются при таком способе. Вследствие этого потенциально ценная информация о движении частиц с низкой частотой может оказаться недоступной. Один из способов снижения помех в нижней части сейсмического диапазона частот в сигналах, зарегистрированных датчиками движения, состоит в использовании результатов измерения сигналов от единственного датчика. Для этого необходимо иметь относительно плотно расположенные датчики, которые предпочтительно размещены на равных расстояниях по длине группы. Такие варианты расположения датчиков не являются практически применимыми из-за ограничений на энергопотребление по длине сейсмической косы и ограничений при обработке больших объемов данных от датчиков. Сохраняется потребность в улучшенных структурах и методиках обработки сигналов сейсмических кос, включая датчики движения частиц, которые способны подавить влияние помех, вызванных движением, в сигналах датчиков движения частиц. Сущность изобретения Способ морской сейсморазведки в соответствии с изобретением включает буксирование сейсмической косы в водоеме. Сейсмическая коса включает ряд пространственно разнесенных групп датчиков, в состав каждой из которых входят датчики, реагирующие на давление, и датчики, реагирующие на движение частиц, пространственно разнесенные в продольном направлении. Сигналы регистрируют каждым из датчиков в ответ на активацию сейсмоисточника. Компоненты оцифрованных (дискретизированных) сигналов реакции на движение в каждой группе, имеющие частоту выше выбранной частоты, объединяют для генерирования соответствующих групповых сигналов реакции на движение. Компоненты сигналов реакции на движение, имеющие частоту ниже выбранной частоты, подвергают скоростной фильтрации. Отфильтрованные по скорости сигналы объединяют с групповыми сигналами реакции на движение для генерирования сигналов реакции на движение полного диапазона частот, соответствующих каждой группе датчиков. Прочие особенности и преимущества настоящего изобретения будут ясны из нижеследующего описания и прилагаемой формулы изобретения. Краткий перечень фигур чертежей На фиг. 1 показан пример сейсморазведочного судна, буксирующего один из вариантов сейсмиче-1 018827 ской косы согласно настоящему изобретению. На фиг. 2 - пример группы датчиков для сейсмической косы, показанной на фиг. 1. На фиг. 3 - блок-схема, демонстрирующая пример способа обработки сигналов с использованием сейсмической косы, показанной на фиг. 1, включающая группы датчиков, показанные на фиг. 2. Сведения, подтверждающие возможность осуществления изобретения На фиг. 1 схематически показан пример системы сбора сейсмических данных. Система включает сейсморазведочное судно 10, которое движется по поверхности водоема 11, например озера или океана. Сейсморазведочное судно 10 может везти оборудование, обозначенное в целом позицией 12 и для удобства называемое "записывающей системой", которое может включать устройства (не показанные отдельно), служащие, помимо выполнения прочих функций, для определения геодезического положения судна 10, для управления активацией одного или нескольких сейсмоисточников 14 (подробнее объясняемой ниже), и для регистрации и выполнения записи индексированных по времени сигналов, зарегистрированных сейсмическими датчиками, расположенными в пространственно разнесенных местах по длине одной или нескольких сейсмических кос 16. Записывающая система 12 может включать программируемый компьютер общего назначения (не показанный отдельно) для обработки сигналов в соответствии с методиками, которые подробнее объясняются ниже. Буксировка сейсмической косы 16 может осуществляться сейсморазведочным судном 10 или другим судном (не показано). Для ясности иллюстрации на фиг. 1 показана только одна сейсмическая коса 16, однако специалистам понятно, что, как правило, сейсморазведочное судно 10 или другое судно будет буксировать ряд таких кос с помощью определенного буксировочного оборудования (не показано) для поддержания кос в выбранном поперечном положении относительно друг друга и диаметральной линии буксирующего судна, например сейсморазведочного судна 10. Буксировка одного или нескольких сейсмоисточников 14 может осуществляться сейсморазведочным судном 10 или другим судном (не показано). Один или несколько сейсмоисточников 14 могут представлять собой пневмопушки, гидропушки, морские вибраторы или группы таких устройств. Один или несколько сейсмоисточников 14 активируются в выбранные моменты времени, при этом сейсмическая волна от них распространяется в воде 11 преимущественно в нижнем направлении, обозначенном позициями 20A и 21A, пока не достигнет подошвы водного слоя 22 и одной или нескольких границ акустических импедансов 24 в формациях 23, 25, расположенных ниже подошвы водного слоя 22. Отраженная сейсмическая волна распространяется преимущественно в верхнем направлении, обозначенном позициями 20B и 21B, и регистрируется сейсмическими датчиками (как объясняется ниже со ссылкой на фиг. 2) в сейсмической косе 16. В данном примере сейсмические датчики могут располагаться в ряде пространственно разнесенных в продольном направлении групп датчиков 18. Записывающая система 12 может выполнять записи зарегистрированных сейсмических сигналов, в общем случае индексированных по времени активации одного или нескольких сейсмоисточников 14. На фиг. 2 показан пример группы сейсмических датчиков 18. Группа сейсмических датчиков 18 может включать ряд отдельных датчиков 31, реагирующих на давление или временной градиент давления, расположенных на выбранных расстояниях друг от друга (например, 0,5 м) и образующих группу 30 датчиков, реагирующих на давление или временной градиент давления ("группа датчиков давления"). Отдельные датчики 31 ("датчики давления") в группе датчиков давления 30 могут представлять собой,например, гидрофоны, которые генерируют электрический или оптический сигнал в ответ на давление или временной градиент давления. В некоторых примерах сигналы от отдельных датчиков давления 31 в группе датчиков давления 30 могут объединяться путем электрического или оптического подключения выходных сигналов отдельных датчиков давления 31 таким образом, что группа датчиков давления 30 фактически генерирует один сигнал реакции на давление, который можно передать на записывающую систему (12 на фиг. 1). Сигнал реакции на давление от группы 30 датчиков давления можно передавать в аналоговой форме либо переводить в цифровую форму в некотором месте (не показано) по длине сейсмической косы (16 на фиг. 1) с помощью аналого-цифрового преобразователя (не показан). В некоторых примерах в каждой группе 30 датчиков давления может быть 16 датчиков давления 31, хотя точное число датчиков давления в каждой группе датчиков давления не ограничивает объем настоящего изобретения. Группа датчиков 18 может также включать ряд пространственно разнесенных датчиков, реагирующих на движение частиц, которые совместно образуют группу 32 датчиков, реагирующих на движение частиц ("группа датчиков движения"). Датчики 33, реагирующие на движение частиц ("датчики движения"), могут представлять собой геофоны, измерители скорости, акселерометры или любое другое известное специалистам устройство, чувствительное к движению частиц. Датчики движения могут представлять собой 1-, 2- и 3-осевые датчики. Датчики движения 33 могут быть расположены таким образом,что продольный центр группы 32 датчиков движения приближенно связан с продольным центром группы 30 датчиков давления. В данном примере в группе 32 датчиков движения может быть тридцать или более датчиков движения 33. В данном примере датчики движения 33 могут представлять собой 3-осевые микроэлектромеханические (microelectrical-mechanical systems, MEMS) акселерометры. Один из неограничивающих примеров акселерометра MEMS, который может использоваться в некоторых примерах, продается под маркойMTi, выпускаемой компанией XSENS, Pantheon 6 а, 7521 PR, ENSCHEDE, Нидерланды. Другой неограничивающий пример акселерометра MEMS продается под маркой ADXL50 и выпускается компаниейAnalog Devices, Inc., 3 Technology Way, Norwood, Massachusetts 02062. В таких акселерометрах имеются чувствительные элементы, реагирующие на ускорение вдоль каждого из трех в общем случае ортогональных направлений. Датчики движения 33 могут генерировать электрический или оптический сигнал,связанный с величиной ускорения, приложенного вдоль измерительной оси каждого чувствительного элемента. Возможное преимущество применения таких устройств, как акселерометры MEMS, в качестве датчиков движения 33, состоит в том, что их небольшой размер, вес и потребление электроэнергии позволяет использовать относительное большое количество датчиков движения 33 в группе 31 датчиков движения. В данном примере датчики движения 33 могут быть пространственно разнесены, по существу,на равные расстояния один относительно другого, включая расстояния между соседними группами датчиков 18 по длине сейсмической косы (16 на фиг. 1). Использование относительно большого количества датчиков движения 33 в каждой группе датчиков движения 31 и упомянутые выше равные расстояния могут сделать возможными некоторые типы обработки сигналов, которые подробнее объясняются ниже. Группа 32 датчиков движения может иметь связанный с ней в удобном положении вблизи от группы датчиков движения 32 модуль обработки сигналов 36, например процессор цифровой обработки сигналов смешанного типа. Модуль обработки сигналов 36 может включать встроенный мультиплексор (не показанный отдельно), который позволяет осуществлять отдельную регистрацию и обработку сигналов от каждого чувствительного элемента (не показанного отдельно) в каждом датчике движения 33 и схеме аналого-цифрового преобразования (не показанной отдельно). Модуль обработки сигналов 36 может быть также запрограммирован для расчета по сигналам каждого чувствительного элемента в каждом датчике движения 33 каждого или обоих вертикальных компонентов волнового поля движения на каждом датчике движения 33 и общего волнового поля движения на каждом датчике движения 33. Вертикальный компонент волнового поля движения можно рассчитать с помощью описанных акселерометров,поскольку имеются два или три ортогональных чувствительных элемента, что делает возможным определение вызванного силой тяжести компонента ускорения, который регистрируется каждым чувствительным элементом. Таким образом, может быть определена гравитационная ориентация каждого датчика движения 33, что обеспечивает выделение вертикального компонента волнового поля движения. Выходные сигналы модуля обработки сигналов 36 могут подаваться на записывающую систему (12 на фиг. 1) для обработки, как объясняется ниже. Как правило, сейсмическая коса, обозначенная позицией 16 на фиг. 1, тянется за буксирующим судном на несколько километров и может включать несколько сотен или более групп датчиков (18 на фиг. 2), таких, как объяснялось выше. Поскольку в результате в типовой сейсмической косе содержится очень большое количество отдельных сейсмических датчиков, в приведенном примере методики обработки сигналов согласно настоящему изобретению сигналы от отдельных датчиков движения (33 на фиг. 2) могут быть обработаны с целью уменьшения объема данных сигналов, передаваемых на записывающую систему (12 на фиг. 1), при одновременной обработке сигналов от отдельных датчиков движения(33 на фиг. 2), посредством которой подавляются помехи, вызванные движением. Подавление помех,вызванных движением, позволяет выполнить определение низкочастотных компонентов сейсмического сигнала по сигналам датчиков движения. Термины "низкочастотный" и "высокочастотный", используемые в настоящем описании, означают частоты, расположенные, соответственно, ниже или выше выбранного частотного порога, ниже которого в сигналах от датчиков движения (33 на фиг. 2) присутствует существенное количество помех, вызванных движением. Такой частотный порог объясняется в патенте'283, выданном Vaage и др., на который имеется ссылка в разделе "Предшествующий уровень техники" настоящего документа, и, как правило, находится в диапазоне от 20 до 30 Гц. На фиг. 3 показана блок-схема, демонстрирующая пример методики регистрации и обработки сигнала согласно настоящему изобретению. В блоке 40 модуль обработки сигнала (36 на фиг. 2) может осуществлять оцифровку и дискретизацию выходного сигнала каждого чувствительного элемента в каждом датчике движения (33 на фиг. 2) с частотой дискретизации, связанной с самой высокой частотой в диапазоне сейсмических частот, представляющих интерес. Например, для верхнего предела сейсмических частот от 100 до 200 Гц такая частота дискретизации может составлять 200 до 400 Гц. В блоке 42 оцифрованные и дискретизированные сигналы датчиков движения могут быть разделены на сигналы низкочастотных компонентов и сигналы высокочастотных компонентов с помощью выбранного частотного порога, как объяснялось выше. Сигналы высокочастотных компонентов от всех датчиков движения (33 на фиг. 2) в каждой группе датчиков движения (32 на фиг. 2) могут быть объединены, добавлены или суммированы для генерирования единого сигнала датчиков движения группы. Сигнал датчиков движения группы может представлять собой вертикальный компонент волнового поля движения, суммированный вертикальный и поперечный компонент, либо может быть общим волновым полем движения, как объяснялось выше. Расчет любого из упомянутых выше волновых полей движения может быть выполнен в модуле обработки сигналов (36 на фиг. 2). Сигналы движения группы, определенные таким образом, могут быть переданы на записывающую систему (12 на фиг. 1) с выбранной частотой цифровой дискретизации (выборки). В блоке 44 сигналы низкочастотных компонентов от каждого отдельного датчика движения (33 на фиг. 2) могут быть переданы на записывающую систему (12 на фиг. 1). В одном примере такая передача может происходить на нижней частоте дискретизации, связанной с пороговой частотой. Например, если пороговая частота равна 20 Гц, низкочастотные компоненты сигналов отдельных датчиков движения могут передаваться на записывающую систему (12 на фиг. 1) при частоте дискретизации 40 Гц. Такая передача на более низкой частоте помогает сохранить телеизмерительную емкость сейсмической косы для других сигналов, например сигналов высокочастотных компонентов. Описанные выше сигналы, переданные на записывающую систему (12 на фиг. 1), могут в дальнейшем обрабатываться, как объясняется ниже, на компьютере записывающей системы (12 на фиг. 1) или на другом программируемом компьютере (который может быть расположен в другом месте) с использованием в качестве входного сигнала записей сигналов, выполненных в записывающем блоке (12 на фиг. 1). В блоке 46 низкочастотный компонент сигналов отдельных датчиков движения может быть отфильтрован по скорости. Такая скоростная фильтрация может представлять собой, например, фильтрацию в частотно-волновочисленной (f-k) области, или (tau-p) фильтрацию в области наклонного суммирования (tau-p). Порог скорости при скоростной фильтрации может быть выбран таким образом, чтобы исключить из числа сигналов любые компоненты, имеющие более низкую скорость, чем скорость звука в воде (около 1500 м/с). Ожидается, что помехи, вызванные движением, имеют более низкую скорость,чем скорость звука в воде. Скоростная фильтрация становится практически осуществимой благодаря использованию относительно большого количества датчиков движения (33 на фиг. 2) и, по существу,равному расстоянию между ними. В блоке 48 отфильтрованные по скорости сигналы низкочастотного компонента от каждого датчика движения в группе (32 на фиг. 1) могут быть затем суммированы. Суммированные сигналы низкочастотного компонента от каждой группы могут быть затем суммированы с сигналами высокочастотного компонента от той же группы датчиков движения для формирования сигнала датчиков движения во всем диапазоне частот для каждой группы датчиков движения. Сигналы датчиков движения во всем диапазоне частот могут быть относительно свободны от помех, вызванных движением. В блоке 50 сигналы датчиков движения во всем диапазоне частот могут быть объединены с сигналами группы датчиков давления от каждой соответствующей группы датчиков давления способом, известным специалистам, в целях обработки объединенных сигналов движения и давления. См., например,патент США 6021092, выданный Paffenholz и др., и патент США 5163028, выданный Barr и др. Такое объединение позволяет сформировать, например, сейсмические сигналы, в которых подавлены эффекты отражения сейсмической волны от поверхности воды. Такие сейсмические сигналы могут называться сигналами с подавленными волнами-спутниками. В другом примере, где телеизмерительная емкость в сейсмической косе (16 на фиг. 1) не ограничена, можно посылать сигнал полного диапазона частот от каждого отдельного датчика движения (33 на фиг. 2) и каждого отдельного датчика давления (31 на фиг. 2) на записывающий блок (12 на фиг. 1) для выполнения записи. Обработка сигналов, как объяснялось со ссылкой на фиг. 3, может выполняться на компьютере в записывающем блоке или на другом компьютере. Однако в данном примере сигнал группы датчиков движения может генерироваться путем разделения сигналов датчиков движения полного диапазона частот на высокочастотные и низкочастотные компоненты, как объяснялось выше, при выбранной частоте, связанной с частотным пределом существенного количества помех, вызванных движением. Сигналы высокочастотных компонентов от датчиков движения в каждой группе (32 на фиг. 2) могут быть объединены или добавлены в компьютере, а не модулем обработки сигналов (36 на фиг. 2), как объяснялось со ссылкой на фиг. 2. Низкочастотные компоненты могут быть отфильтрованы по скорости,как объяснялось выше, а оставшаяся часть обработки может быть выполнена, как объяснялось выше со ссылкой на фиг. 3. Аналогичным образом, сигналы давления от отдельных датчиков давления могут быть объединены для формирования сигнала группы датчиков давления для каждой группы датчиков давления (30 на фиг. 2) в компьютере. Способы и системы согласно настоящему изобретению могут обеспечить улучшенные сейсмические данные, поскольку влияние помех на низкочастотную часть сигналов датчиков движения частиц существенно снижается. Хотя настоящее изобретение описано с использованием ограниченного числа вариантов осуществления, специалисты, воспользовавшись раскрытым изобретением, смогут вывести из настоящего описания другие варианты осуществления, не отступающие от объема раскрытого изобретения. Соответственно, объем изобретения ограничивается только прилагаемой формулой. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ морской сейсморазведки, включающий следующие шаги: буксируют по меньшей мере одну сейсмическую косу в водоеме, при этом сейсмическая коса включает ряд пространственно разнесенных групп датчиков, каждая из которых включает ряд пространственно разнесенных в продольном направлении датчиков, реагирующих на движение частиц; регистрируют сигналы каждым из датчиков, реагирующих на движение частиц, в ответ на активацию сейсмоисточника; суммируют компоненты сигналов реакции на движение в каждой группе, имеющие частоту выше выбранной частоты, для генерирования соответствующих групповых сигналов реакции на движение; подвергают скоростной фильтрации компоненты сигналов реакции на движение, имеющие частоту ниже выбранной частоты, и объединяют отфильтрованные по скорости сигналы с групповыми сигналами реакции на движение для генерирования сигналов реакции на движение полного диапазона частот, соответствующих каждой группе датчиков. 2. Способ по п.1, отличающийся тем, что скоростная фильтрация включает исключение компонентов сигналов, имеющих скорость ниже скорости звука в воде. 3. Способ по п.1, отличающийся тем, что скоростная фильтрация включает фильтрацию в частотноволновочисленной области. 4. Способ по п.1, отличающийся тем, что скоростная фильтрация включает фильтрацию в области наклонного суммирования. 5. Способ по п.1, отличающийся тем, что компоненты сигналов реакции на движение, имеющие частоту ниже выбранной частоты, передают на записывающую систему при частоте дискретизации, связанной с выбранной частотой, причем частота дискретизации ниже, чем частота цифровой дискретизации, связанная с верхним пределом представляющего интерес диапазона сейсмических частот. 6. Способ по п.1, отличающийся тем, что выбранная частота связана с частотой помех, вызванных движением при буксировании, в сигналах датчиков, реагирующих на движение частиц. 7. Способ по п.6, отличающийся тем, что выбранная частота равна 20 Гц. 8. Способ по п.1, отличающийся тем, что по меньшей мере одна сейсмическая коса содержит ряд групп датчиков, реагирующих на давление, каждая из которых связана с каждой группой датчиков, реагирующих на движение частиц, причем способ включает следующие шаги: регистрируют сигналы реакции на давление в ответ на активацию сейсмоисточника и объединяют сигналы реакции на давление с сигналами реакции на движение полного диапазона частот для генерации сейсмических сигналов с подавленными волнами-спутниками. 9. Способ по п.1, отличающийся тем, что зарегистрированные сигналы реакции на движение подвергают цифровой дискретизации в сейсмической косе с частотой, соответствующей представляющей интерес максимальной сейсмической частоте, причем сигналы реакции на движение, имеющие частоту ниже выбранной частоты, передают на записывающую систему с частотой дискретизации, связанной с выбранной частотой и более низкой, чем частота цифровой дискретизации. 10. Способ по п.1, отличающийся тем, что компоненты сигналов реакции на движение, имеющие частоту выше выбранной частоты, объединяют в сейсмической косе для генерации соответствующих групповых сигналов реакции на движение, которые передают из сейсмической косы на записывающую систему.
МПК / Метки
МПК: G01V 1/38
Метки: сейсморазведки, типами, морской, косы, сейсмической, способ, групповая, датчиков, двумя, структура
Код ссылки
<a href="https://eas.patents.su/7-18827-gruppovaya-struktura-datchikov-dlya-morskojj-sejjsmicheskojj-kosy-s-dvumya-tipami-datchikov-i-sposob-sejjsmorazvedki.html" rel="bookmark" title="База патентов Евразийского Союза">Групповая структура датчиков для морской сейсмической косы с двумя типами датчиков и способ сейсморазведки</a>
Способ предсказания кратных волн, связанных с поверхностью, на основе данных буксируемой морской сейсмической косы с двумя типами датчиков
Номер патента: 12636
Опубликовано: 30.12.2009
Автор: Зёлльнер Вальтер
МПК: G01V 1/28
Метки: связанных, двумя, морской, основе, сейсмической, поверхностью, кратных, косы, буксируемой, предсказания, волн, датчиков, типами, данных, способ
Формула / Реферат:
1. Способ обработки сейсмических данных, полученных посредством буксируемой морской сейсмической косы, содержащей датчики движения сейсмической массы и датчики давления, состоящий в том, что комбинируют сигналы датчиков движения сейсмической массы и сигналы датчиков давления для образования восходящей составляющей волнового поля давления и падающей составляющей волнового поля движения сейсмической массы; экстраполируют падающую составляющую...
Способ и система для преобразования трехмерных данных буксируемой сейсмической косы с двумя типами датчиков в данные с подавленным шумом
Номер патента: 14279
Опубликовано: 29.10.2010
Автор: Клювер Тилман
Метки: шумом, сейсмической, способ, типами, датчиков, данных, двумя, трехмерных, система, преобразования, косы, подавленным, буксируемой, данные
Формула / Реферат:
1. Способ преобразования трехмерных данных буксируемой сейсмической косы с двумя типами датчиков в данные с подавленным шумом, в которомпреобразуют трехмерные данные буксируемой сейсмической косы с двумя типами датчиков, представляющие подземные образования и полученные группой установленных вблизи поверхности земли сейсмических датчиков, в масштабированные сейсмические данные с подавленным шумом от наложения частот;преобразуют записи давления и...
Способ и устройство для повышения отношения кратности перекрытия к длине морской сейсмической косы.
Номер патента: 1196
Опубликовано: 25.12.2000
Авторы: Вааге Свейн Торлейф, Джакобсен Нильс-Эрик, Роннинген Рольф
МПК: G01V 1/36
Метки: кратности, устройство, морской, повышения, косы, отношения, способ, перекрытия, сейсмической, длине
Формула / Реферат:
1. Способ записи сейсмических данных при проведении морских сейсмических работ по линии профиля, включающий: буксирование морских сейсмических кос за первым кораблем, причем морские косы содержат приемники сейсмических сигналов, установленные вдоль косы для приема сейсмических колебаний и передачи их на первый корабль, и крайние морские косы определяют направление движения кос преимущественно параллельно линии профиля; буксирование первого...
Способ очистки от ложных отражений данных морской сейсмической косы во всей полосе частот
Номер патента: 18531
Опубликовано: 30.08.2013
Авторы: Рийанти Христина Д., Ван Ден Берг Петер М., Ван Борселен Роальд Дж., Фоккема Якоб Т.
МПК: G01V 1/38, G06F 17/14
Метки: полосе, способ, всей, данных, частот, очистки, морской, отражений, сейсмической, ложных, косы
Формула / Реферат:
1. Способ морской сейсморазведки, включающий следующие шаги:получают и записывают сейсмические данные с помощью морских сейсмических кос, которые отражают характеристики формаций геологической среды, при этом сейсмические данные собирают посредством размещения ряда сейсмоприемников сверху оцениваемой области формаций геологической среды, причем сейсмоприемники формируют электрический и/или оптический сигнал в ответ на сейсмическую...
Система и способ морской сейсморазведки
Номер патента: 16513
Опубликовано: 30.05.2012
Авторы: Тенгамн Стиг Руне Леннарт, Бёрресен Клаес Николай
МПК: G01V 1/20
Метки: морской, система, способ, сейсморазведки
Формула / Реферат:
1. Система морской сейсморазведки, включающая по меньшей мере одну морскую сейсмическую косу;по меньшей мере один датчик давления, установленный по меньшей мере в одной морской сейсмической косе;по меньшей мере один датчик движения частиц, установленный по меньшей мере в одной морской сейсмической косе и размещенный совместно по меньшей мере с одним датчиком давления,причем по меньшей мере один датчик движения частиц имеет резонансную частоту,...
Предыдущий патент: Производные дикарбоновых кислот в качестве агонистов рецептора s1p1
Следующий патент: Способ разогрева и слива вязких и застывших продуктов из емкости и устройство для его осуществления
Случайный патент: Производные 3-циано-4-(4-тетрагидропиранфенил)пиридин-2-она