Способ синхронизации передачи данных множеству пользователей в нисходящем канале многоточечной системы передачи данных с использованием очу-модуляции
Номер патента: 5669
Опубликовано: 28.04.2005
Авторы: Хименес Маркина Франсиско Хавьер, Ривейро Инсуа Хуан Карлос, Бласко Кларет Хорхе Висенте, Ирансо Малинеро Сальвадор, Гавилльеро-Мартин Хуан-Мигель, Фоурен Нильс Хакан

Формула / Реферат
1. Способ синхронизации передачи данных множеству пользователей в нисходящем канале многоточечной системы передачи данных с использованием ОЧУ-модуляции в процессе двунаправленной связи по электрической сети между головным узлом и множеством пользователей, в котором предусмотрено средство добавления и обнаружения циклического префикса из ОЧУ-символов, имеющее интерполяторы и прореживатели передающих и принимающих систем оборудования, и транспонирование цифрового сигнала в полосу частот, при этом в информацию, передаваемую по нисходящему каналу, связывающему головной узел с пользовательскими терминалами, включены синхронизирующие последовательности, обеспечивающие частотную и временную синхронизацию при приеме, отличающийся тем, что для генерирования синхронизирующих последовательностей используются два идентичных синхронизирующих символа (16), которые оборудование головного узла периодически передает по нисходящему каналу всем пользовательским терминалам, которые обнаруживают такие синхронизирующие последовательности при приеме, выборочно рассчитывают и корректируют частоты дискретизации в аналого-цифровых преобразователях (7), входящих в приемники пользовательских терминалов, или осуществляют восстановление дискретизированного цифрового сигнала (частотную синхронизацию) и одновременный расчет момента начала каждого ОЧУ-символа (временную синхронизацию).
2. Способ по п.1, отличающийся тем, что распознавание синхронизирующих последовательностей осуществляется на основе критериев наибольшего правдоподобия таким образом, что временная синхронизация начинается с вычисления максимума корреляции дискретных импульсов двух принятых символов, при этом такой максимум соответствует средней точке плоского участка кривой пиковых значений корреляции, размер которого в пересчете на дискретные импульсы равен количеству дискретных импульсов циклического префикса без учета межсимвольной интерференции (МСИ), а частотная синхронизация осуществляется путем вычисления угла такой корреляции в момент, определенный как максимум корреляции.
3. Способ по п.2, отличающийся тем, что максимум корреляции вычисляется путем обнаружения пиковых значений корреляции, которые превосходят пороговую величину, которая соответствует результату умножения мощности на постоянную величину C, при этом за такой максимум принимается средняя точка плоского участка кривой пиковых значений корреляции, размер которого в пересчете на дискретные импульсы равен количеству дискретных импульсов циклического префикса без учета межсимвольной интерференции (МСИ), постоянная величина C зафиксирована, чтобы минимизировать вероятность возникновения сигналов ложной тревоги, корреляция рассчитывается с использованием алгоритма

а для вычисления мощности используется алгоритм

где g(m) обозначает корреляцию в момент дискретного импульса m, а x(m) обозначает мощность в момент дискретного импульса m, r(k) обозначает дискретный импульс, принятый в момент k, r* (k+n) обозначает комплексное сопряжение принятого дискретного импульса в момент k+n, n = N+L, а l = n, при этом N обозначает количество дискретных импульсов одного из символов синхронизирующей последовательности, а L обозначает количество дискретных импульсов циклического префикса.
4. Способ по пп.2 и 3, отличающийся тем, что вычисление корреляции и мощности осуществляется многократно, при этом принятые дискретные импульсы и предпочтительно частичные произведения текущего дискретного импульса и сопряженного дискретного импульса, поступившего на N+L дискретных импульсов раньше, хранятся в приемнике для вычисления корреляции и мощности с использованием алгоритмов
P(d) = P(d-1) + (rdr*d-(N+L)) - (rd.Nr*d-(N+L)-N),
R(d) = R(d-1) + |rd|2-|rd-N|2,
где P(d) обозначает корреляцию, R(d) обозначает мощность, r(d) обозначает текущий дискретный импульс, rd-N обозначает дискретный импульс, поступивший в приемник на N дискретных импульсов раньше, r*d-(N+L) обозначает комплексное сопряжение дискретного импульса, принятого на N+L дискретных импульсов раньше, а r*d-(N+L)-N обозначает комплексное сопряжение дискретных импульсов, принятых на 2N+L дискретных импульсов раньше.
5. Способ по п.3, отличающийся тем, что в случае, если частотная погрешность оказывается меньше предварительно установленной пороговой величины, для упрощения вычислений используется лишь действительная часть корреляции.
6. Способ по любому из пп.3-5, отличающийся тем, что для обнаружения синхронизирующей последовательности величина корреляции сравнивается с мощностью, умноженной на величину C, чтобы минимизировать вероятность сигнала ложной тревоги, а искомая синхронизирующая последовательность и оптимальный момент дискретного импульса отвечают заданному условию |g|> Cx, где C обозначает коэффициент, на который умножается мощность, а их произведение используется в качестве пороговой величины.
7. Способ по п.1, отличающийся тем, что два идентичных символа синхронизации выборочно состоят из фиксированной или псевдослучайной информации.
8. Способ по любому из пп.1-6, отличающийся тем, что синхронизация частоты дискретизации и временная синхронизация при приеме состоят из стадии сбора показаний синхронизации и стадии слежения за показаниями синхронизации, при этом стадия сбора предусматривает поиск определенного количества синхронизирующих последовательностей, приблизительную коррекцию частотной погрешности и переход к стадии слежения как в случае частотной, так и временной синхронизации.
9. Способ по п.8, отличающийся тем, что стадия сбора показаний временной синхронизации предусматривает стадию ожидания до обнаружения синхронизирующей последовательности с определенным количеством символов или синхронизирующих последовательностей в ожидаемом положении и в ожидаемые моменты с последующим переходом к стадии слежения, чтобы снизить вероятность сбора показаний синхронизации вследствие сигнала ложной тревоги.
10. Способ по пп.8 и 9, отличающийся тем, что после сбора показаний временной синхронизации предусмотрена стадия слежения за показаниями временной синхронизации, заключающаяся в обнаружении синхронизирующих последовательностей, переданных пользователям по нисходящему каналу, учете количества неполученных последовательностей, при этом в случае превышения определенного предела происходит возврат к стадии сбора.
11. Способ по любому из пп.8-10, отличающийся тем, что на стадии слежения за показаниями временной синхронизации при поступлении каждой новой синхронизирующей последовательности происходит изменение момента начала ОЧУ-символа, при этом такое изменение осуществляется путем варьирования в группе дискретных импульсов, использованных для преобразования сигналов из временной области в частотную область, предусмотренного пользовательскими приемниками и способного привести к изменению фазы или повороту демодулированных совокупностей, что корректируется за счет соответствующей коррекции, для чего предпочтительно после синхронизирующих последовательностей передаются корректирующие последовательности.
12. Способ по п.8, отличающийся тем, что стадия сбора показаний частотной синхронизации подавляется в том случае, если генератор, используемый для генерирования частоты дискретизации в аналого-цифровом преобразователе приемника, обладает достаточной точностью.
13. Способ по п.8, отличающийся тем, что после стадии сбора показаний временной синхронизации следует стадия сбора показаний частотной синхронизации, на которой предусмотрен расчет погрешности частоты дискретизации на основе угла корреляции в момент ее максимальной величины, для чего используется точка, расположенная посередине плоского участка критющ максимальных величин, согласно следующему алгоритму:

где M обозначает интерполяционный коэффициент и прореживающий коэффициент, fc обозначает несущую, fs обозначает частоту дискретизации, а Dfs обозначает погрешность частоты дискретизации, при этом на данной стадии дополнительно осуществляют коррекции с использованием частотного корректора, выборочно состоящего из управляемого напряжением генератора (28) или устройства (27) восстановления дискретизированного сигнала с соответствующими фильтрами (12), для чего на основе предыдущего алгоритма вычисляют углы корреляции в момент ее максимальной величины, вычисляют арктангенс отношения воображаемой части и действительной части и с использованием предыдущего алгоритма получают величину Dfs, при этом многократно повторяют такие действия до тех пор, пока расчетная величина погрешности частоты дискретизации не будет ниже определенной пороговой величины.
14. Способ по любому из пп.8-13, отличающийся тем, что на стадии слежения за показаниями частотной синхронизации предусмотрено умножение принятого сигнала на показатель вращателя, который компенсирует поворот совокупности на каждой несущей в частотной области, при этом показатель вращателя вычисляют путем вычисления скорости поворота совокупности на каждой частоте.
15. Способ по п.14, отличающийся тем, что для вычисления скорости поворота совокупности на каждой несущей во время передачи данных по нисходящему каналу на некоторых несущих, известных как несущие, модулированные фиксированной модуляцией, положение которых меняется во времени, когда такие несущие используются для передачи информации, периодически передается сетка (символы фиксированной модуляции), принуждающая головной узел использовать фиксированную модуляцию предпочтительно с низким отношением сигнал-шум, необходимым для демодуляции, а пользователям известно положение несущих, модулированных фиксированной модуляцией, и они могут осуществлять контроль качества линии передачи данных на таких несущих, зная использованный на них тип модуляции, независимо от того, является ли пользователь адресатом информации, переданной на таких несущих, модулированных фиксированной модуляцией, при этом пользователям заранее неизвестно, являются ли они адресатами модулированной информации на таких несущих.
16. Способ по п.15, отличающийся тем, что максимальный период сетки (символов фиксированной модуляции) зафиксирован на основе максимума поворота на наибольшей несущей таким образом, чтобы не вызывать переполнения, при этом NT представляет собой период сетки (символов фиксированной модуляции) в перечете на символы, т.е. максимальное количество символов между двумя последовательными измерениями угла на определенной несущей, при этом фиксированная модуляция может быть распределена среди N несущих в системе таким образом, что все несущие один раз на протяжении NT символов модулированы фиксированной модуляцией, а

где суммарное количество несущих, модулированных фиксированной модуляцией на протяжении следования NT символов, равно общему количеству несущих в системе, Ni обозначает количество несущих, модулированных фиксированной модуляцией с символом i, в результате чего через NT символов получают новый результат измерения скорости поворота на каждой из несущих.
17. Способ по пп.15 и 16, отличающийся тем, что для вычисления скорости поворота при приеме пользователь демодулирует информацию, переданную на несущих, модулированных фиксированной модуляцией, заранее зная использованный на них тип модуляции, независимо от того, является ли такой пользователь адресатом информации, переданной головным узлом, и вычисляет углы поворота для переданной совокупности, после чего сравнивает такие углы с результатом предыдущего вычисления на тех же несущих и делит на время между двумя измерениями угла, получая в результате скорость поворота на таких несущих.
18. Способ по пп.15 и 17, отличающийся тем, что для расчета частотной погрешности на стадии слежения измеряют среднюю величину угла поворота совокупности на каждой из несущих за период одного символа и корректируют такую погрешность с использованием частотного корректора (27), (28), при этом такая средняя величина соответствует углу корреляции.

Текст
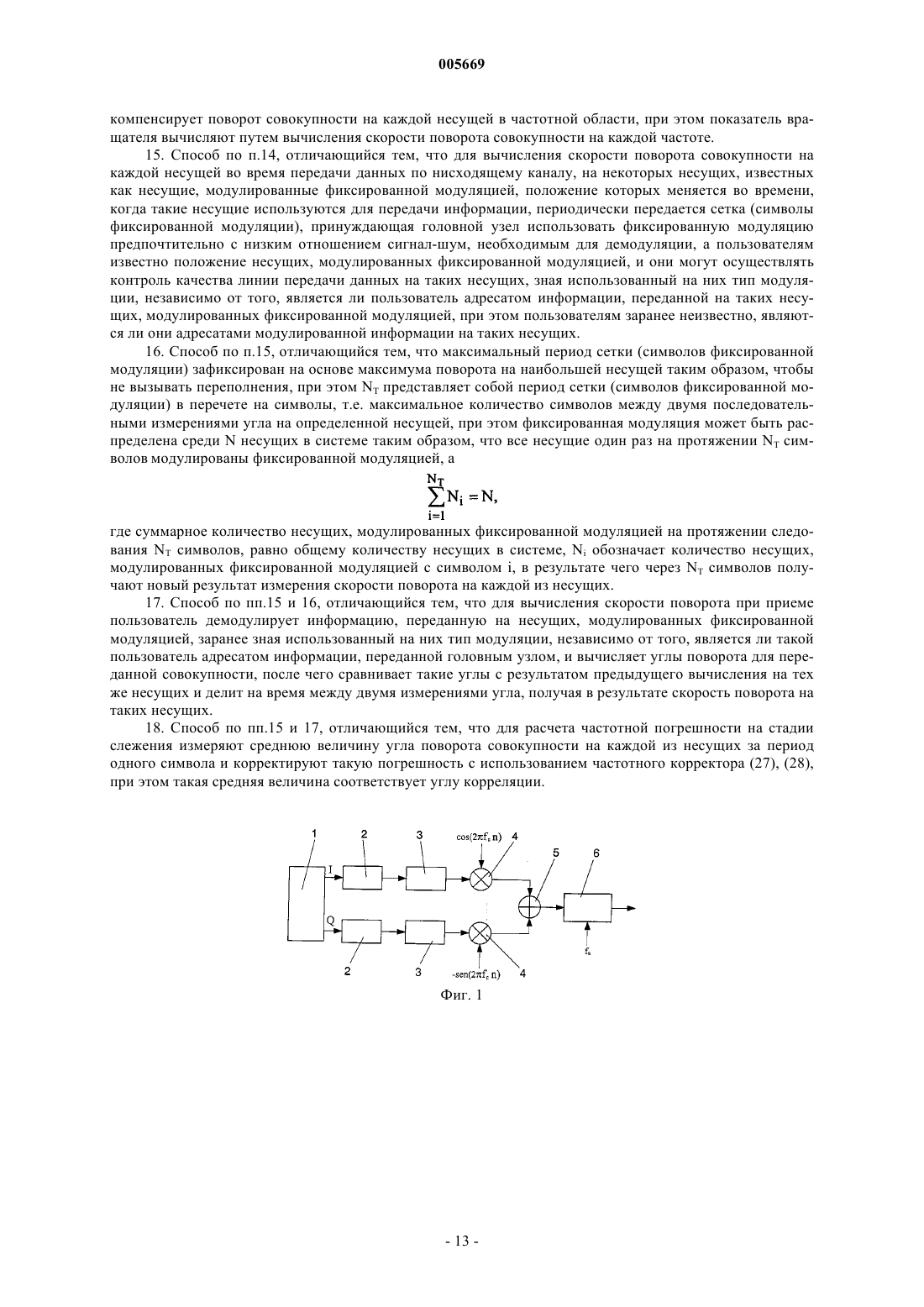
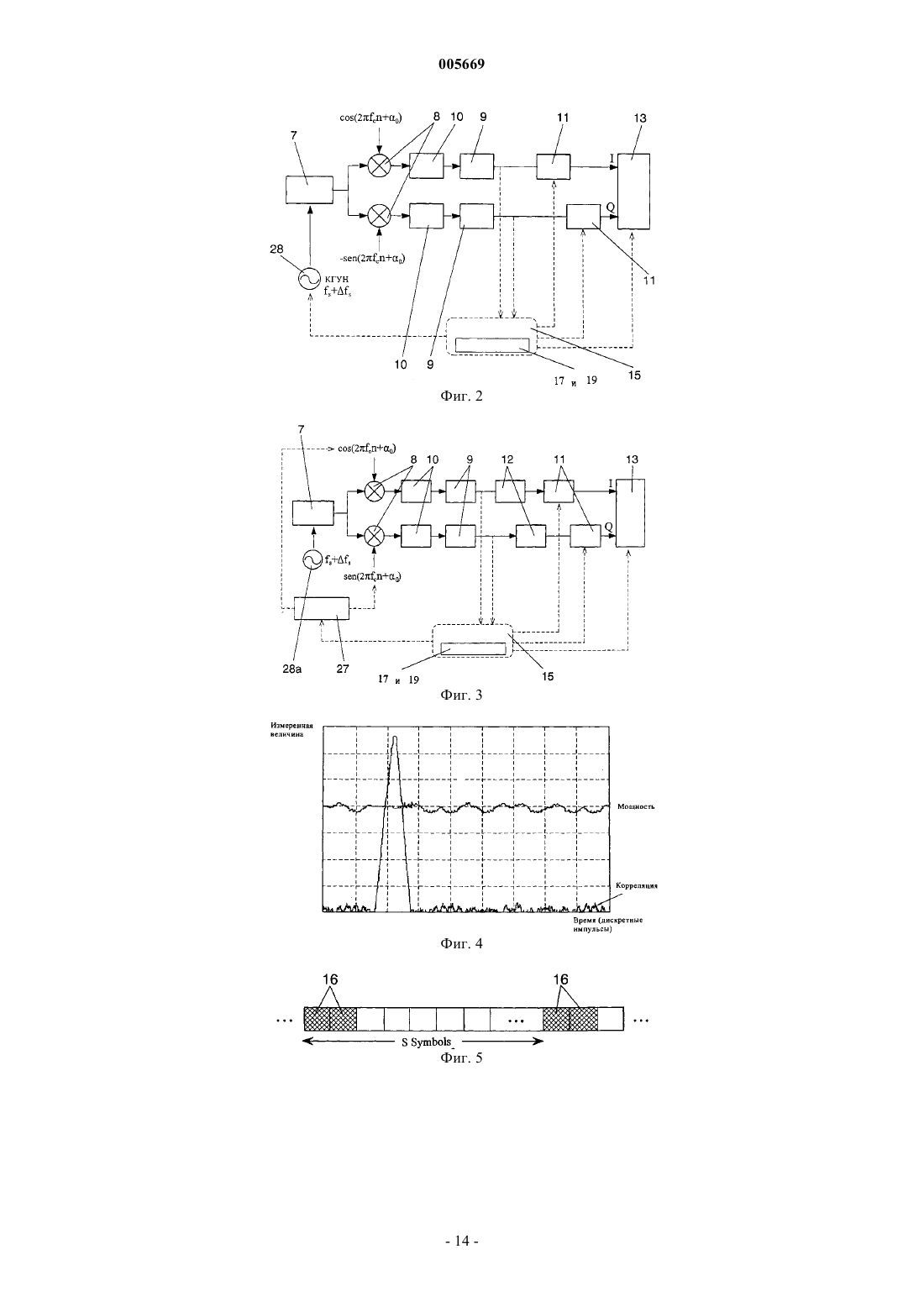
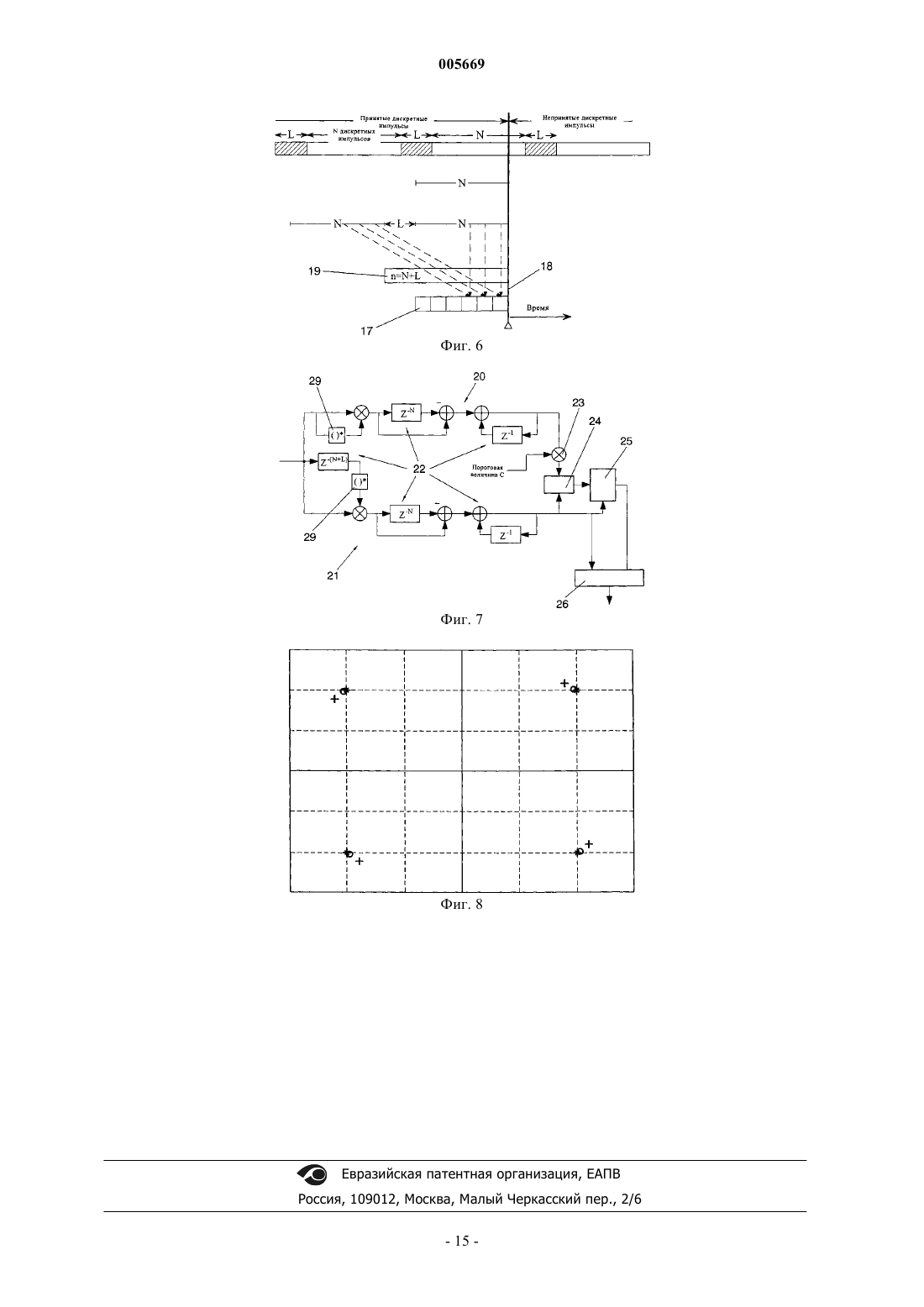
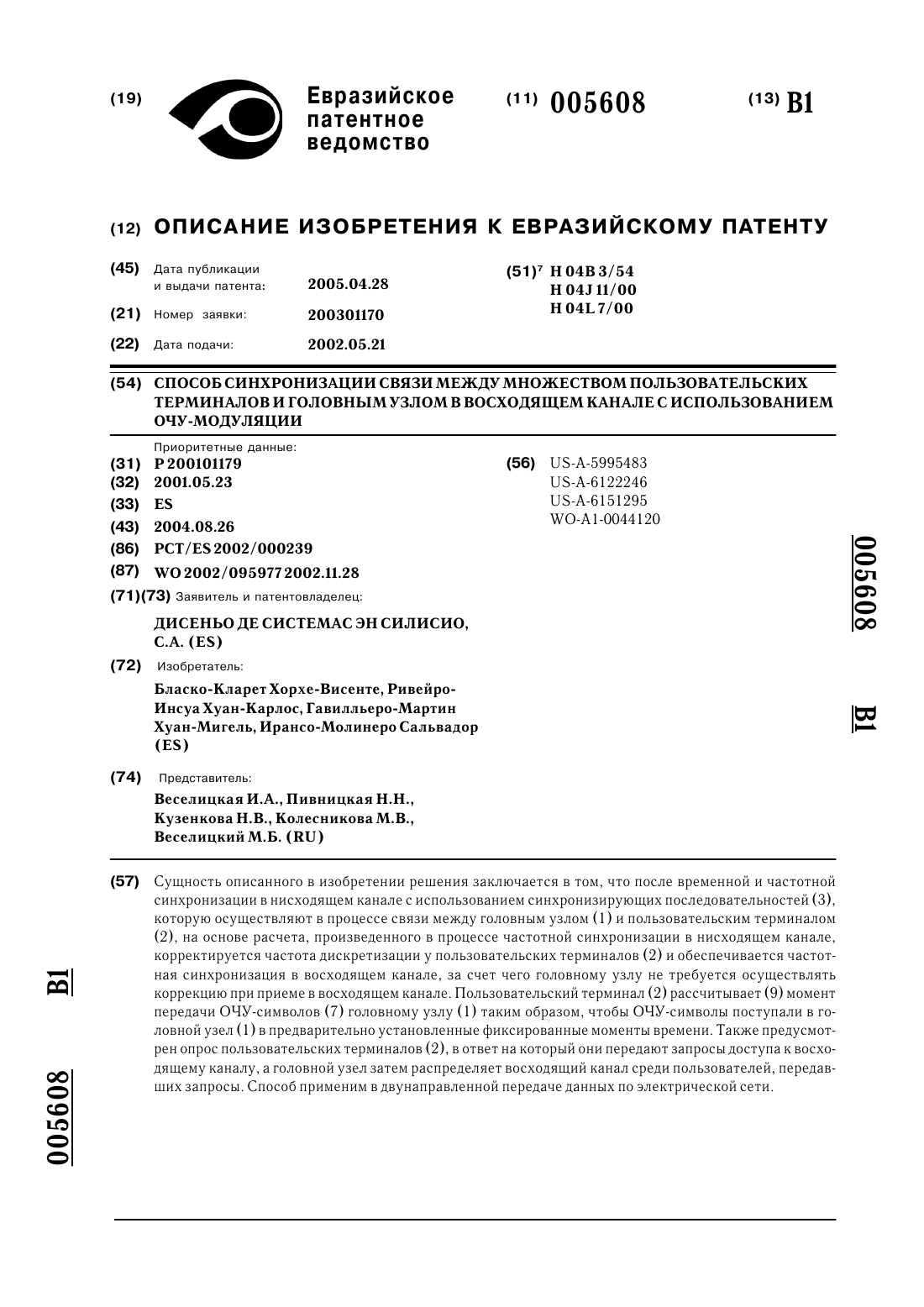
005669 Область техники, к которой относится изобретение Настоящее изобретение относится к дистанционной передаче данных, в частности к системам двунаправленной связи между головным узлом и множеством пользователей (пользовательских терминалов), с синхронизацией в нисходящем канале, т.е. на линии связи между головным узлом и пользовательскими терминалами, с использованием электрической сети в качестве передающей среды для предоставления пользователям разнообразных услуг. Задачи изобретения Основной задачей настоящего изобретения является обеспечение нового, отличающегося высокой надежностью способа временной и частотной синхронизации в нисходящем канале передачи данных по электрической сети, в котором решены характерные проблемы, связанные с высоким уровнем шума и частотной избирательностью при передаче данных по электрической сети, использование которого предотвращает возникновение ложных показаний синхронизации в нисходящем канале. Способ по изобретению позволяет осуществлять синхронизации множества пользовательских приемников на частоте, используемой передатчиком головного узла, на основе сигнала, принимаемого по нисходящему каналу. Кроме того, в описанном способе предусмотрено, что каждый пользовательский приемник, используя дискретные импульсы (отсчеты) принятого сигнала, определяет, какой дискретный импульс из всех поступивших относится к данному сигналу, т.е. каждому пользовательскому приемнику известно начало каждого символа. Задачей изобретения является прежде всего обеспечение синхронизации множества пользовательских терминалов в системе, описанной в заявке на патент Испании 20003024, в которой предложены система и способ многоточечной цифровой передачи данных по электрической сети. Предпосылки создания изобретения Из предшествующего уровня техники известны различные способы ортогонального частотного уплотнения сигналов, однако ни один из них не обеспечивает достаточно высокий уровень надежности,необходимый для того, чтобы избежать ложных показаний синхронизации в системах многоточечной передачи данных, в которых в качестве передающей среды используется электрическая сеть. Общеизвестно, что электрическая сеть является сложной для использования в качестве передающей среды в силу того факта, что подключение множества устройств к электрической сети и их отключение от нее сопровождается возрастанием напряжения до пиковых значений и колебаниями полного сопротивления линии передачи, что приводит к колебаниям во времени амплитудно-частотной характеристики канала. Из известных способов синхронизации следует особо упомянуть описанный в патенте US 5732113 способ временной синхронизации с использованием одного символа синхронизации, разделенного на две равные части, в котором для осуществления синхронизации используется меньшее количество дискретных импульсов (отсчетов), чем это предложено в настоящем изобретении, при этом импульсные помехи,широко распространенные в электрических сетях, в гораздо большей степени влияют на синхронизацию,поскольку по определению такие помехи представляют собой случайный шум, влияющий на малое количество дискретных импульсов, в результате чего они воздействуют на процесс синхронизации в большей степени, чем это происходит в предложенном способе, что делает способ с использованием лишь одного символа синхронизации нежелательным для применения в системе передачи данных по электрической сети. Следует также отметить, что использование одного символа синхронизации предполагает более значительные отклонения при вычислении или расчете синхронизации, что вызвано использованием меньшего количества дискретных импульсов для осуществления синхронизации. В статье P. Moose, озаглавленной "A technique for orthogonal frequency division multiplexing frequency offset correction" и опубликованной в IEEE Trans, on Comm., т. 42, cc. 2908-2914, октябрь 1994 г.,изложена концепция использования двух одинаковых символов, однако такие символы не только никогда не предлагались и не использовались для осуществления синхронизации, что имеет место в настоящем изобретении, а, напротив, у Moose они используются для расчета погрешностей аналогового сдвига частоты. Наконец, из известного уровня техники, например, из патента US 5732113 или из статьи Moose известно использование арктангенса корреляции для исправления погрешностей аналогового сдвига при осуществлении частотной синхронизации. Для осуществления частотной синхронизации в настоящем изобретении производится расчет погрешности частоты дискретизации в аналого-цифровых преобразователях каждого пользовательского приемника, что существенно отличается от известного уровня техники. Краткое изложение сущности изобретения Для осуществления частотной и временной синхронизации в нисходящем канале с использованием ОЧУ-модуляции для множества пользовательских терминалов в многоточечной системе передачи данных, в которой в качестве передающей среды используется электрическая сеть, в настоящем изобретении предусмотрена передача синхронизирующих последовательностей, которые введены в информацию, передаваемую по нисходящему каналу, т.е. каналу связи головного узла с пользовательскими терминалами,-1 005669 при этом предлагаемый в изобретении способ отличается тем, что генерируются синхронизирующие последовательности из двух идентичных синхронизирующих символов, которые оборудование головного узла периодически передает по нисходящему каналу всем пользовательским терминалам, которые в свою очередь распознают такие синхронизирующие последовательности при приеме, рассчитывают и корректируют частоту дискретизации в аналого-цифровых преобразователях, которыми оснащены приемники пользовательских терминалов, или осуществляют восстановление дискретизированного цифрового сигнала (частотную синхронизацию) и одновременно рассчитывают время начала каждого ОЧУ-символа(временная синхронизация). Распознавание синхронизирующих последовательностей осуществляется путем известной из техники максимизации критериев наибольшего правдоподобия, которая в настоящем изобретении отличается тем, что временная синхронизация начинается с вычисления максимума корреляции между дискретными импульсами двух символов принятых последовательностей, при этом такой максимум соответствует средней точке плоского участка кривой пиковых значений корреляции, размер которого в пересчете на дискретные импульсы равен количеству дискретных импульсов циклического префикса без учета межсимвольной интерференции (МСИ), а частотная синхронизация осуществляется путем вычисления угла такой корреляции в момент, определенный как максимум корреляции. Максимум корреляции вычисляется путем обнаружения пиковых значений корреляции, которые превосходят предварительно установленную пороговую величину мощности принимаемого сигнала, при этом за такой максимум принимается средняя точка плоского участка кривой пиковых значений корреляции, размер которого в пересчете на дискретные импульсы равен количеству дискретных импульсов циклического префикса без учета межсимвольной интерференции (МСИ), циклический префикс является префиксом, который обычно прибавляется для предотвращения межсимвольной интерференции, указанная пороговая величина является фиксированной, чтобы минимизировать вероятность сбора показаний синхронизации из-за сигналов ложной тревоги (обычно вызванных импульсными помехами, влияющими на электрическую сеть), а корреляция J (m) рассчитывается с использованием следующего алгоритма: где m обозначает момент вычисления корреляции, r(к) обозначает дискретный импульс, принятый в момент к, r(к+n) обозначает комплексное сопряжение принятого дискретного импульса в момент k+n, 1 =N, a n = N+L, при этом N обозначает количество дискретных импульсов одного из символов синхронизирующей последовательности, a L обозначает количество дискретных импульсов циклического префикса в ОЧУ-символе. Алгоритм корреляции представляет собой математическую корреляцию двух интервалов N дискретных импульсов, разделенных N+L дискретными импульсами принятого сигнала. Для вычисления мощности используется следующий алгоритм: т.е. вычисленная мощность равна квадрату модуля дискретных импульсов, принятых модемом. Способ по изобретению предусматривает итерационное вычисление корреляции и мощности. В этом случае полученная в результате итерационного вычисления корреляция обозначается как P(d), а мощность - как R(d), где d обозначает момент вычисления корреляции. При этом принятые дискретные импульсы хранятся в приемнике, равно как и частичные произведения, а для итерационного вычисления корреляции P(d) используется следующий алгоритм:P(d) = P(d-1)+(rd rd.(N+L - (rd-Nrd-(N+L)-N). Для вычисления мощности R(d) используется алгоритмR(d) = R(d-1) + rd2-rd-N2,где r(d) обозначает текущий дискретный импульс, rd-N обозначает дискретный импульс, поступающий в приемник на N дискретных импульсов раньше, N обозначает количество дискретных импульсов в одном из символов синхронизирующей последовательности, rd-(N+L) обозначает комплексное сопряжение дискретного импульса, принятого на N+L дискретных импульсов раньше, a rd-(N+L)-N обозначает комплексное сопряжение дискретных импульсов, принятых на 2N+L дискретных импульсов раньше, при этом L обозначает количество дискретных импульсов циклического префикса ОЧУ-символа. Итерационное вычисление корреляции заключается в том, что к корреляционной величине, вычисленной для предшествующего дискретного импульса, прибавляется произведение текущего дискретного импульса и комплексного сопряжения дискретного импульса, принятого на N+L дискретных импульсов раньше, а из полученного результата вычитается произведение дискретного импульса, принятого на N дискретных импульсов раньше, и комплексное сопряжение дискретного импульса, принятого на 2N+L дискретных импульсов раньше. Соответственно, итерационное вычисление мощности заключается в том, что к величине мощности,вычисленной для предшествующего дискретного импульса, прибавляется квадрат текущего дискретного импульса и вычитается квадрат дискретного импульса, принятого на N дискретных импульсов раньше.-2 005669 Для упрощения вычислений в предлагаемом в изобретении способе использована лишь действительная часть корреляции, поскольку она превалирует над воображаемой, если погрешность частоты не превышает предварительно установленную пороговую величину. Для обнаружения синхронизирующих последовательностей в предлагаемом в изобретении способе сравнивают корреляционную величину с величиной мощности, умноженной на величину С, с тем, чтобы минимизировать вероятность сбора показаний синхронизации вследствие импульсных помех, в результате чего обнаруживают синхронизирующую последовательность и определяют оптимальный момент для дискретного импульса, когда корреляционная величина превышает пороговую величину, ранее упомянутую в связи с полученной величиной мощности, или равна ей. Оба идентичных символа синхронизации выборочно состоят из фиксированной и/или псевдослучайной информации, которая передается на несущих в составе таких символов синхронизации и распознается при приеме. Как синхронизация частоты дискретизации, так и временная синхронизация, у приемников предусматривает стадию сбора показаний синхронизации и стадию слежения за показаниями синхронизации,при этом на стадии сбора показаний синхронизации осуществляется поиск заданного количества синхронизирующих последовательностей, и в случае обнаружения такого заданного количества последовательностей проверяется их достоверность и до перехода к стадии слежения осуществляется коррекция погрешности частоты. Стадия сбора показаний временной синхронизации предусматривает ожидание до обнаружения синхронизирующей последовательности приемником, после чего приемник ожидает поступления следующего определенного количества синхронизирующих последовательностей, которые отделены определенным количеством дискретных импульсов, поскольку передатчик передает синхронизирующие последовательности периодически, при этом все указанные действия осуществляются до перехода к стадии слежения, целью которой является снижение вероятности сбора показаний синхронизации вследствие сигналов ложной тревоги. После сбора показаний временной синхронизации осуществляется стадия слежения за показаниями временной синхронизации, на которой продолжается обнаружение синхронизирующих последовательностей, переданных пользовательским терминалам по нисходящему каналу, при этом стадия слежения предусматривает ведение учета количества неполученных последовательностей, а в случае превышения определенной пороговой величины происходит возврат на стадию сбора. В предлагаемом в изобретении способе предусмотрено, что при каждом поступлении синхронизирующей последовательности на стадии слежения за показаниями временной синхронизации меняется момент, отмечающий начало ОЧУ-символа. Для такого изменения варьируется группа дискретных импульсов, относящихся к стадии преобразования сигналов из временной в частотную область, обычно предусмотренной в пользовательских приемниках и способной вызвать изменение фазы или поворот демодулированных совокупностей, который исправляется путем коррекции, для чего предпочтительно после синхронизирующих последовательностей передаются корректирующие последовательности. В предлагаемом в изобретении способе предусмотрена возможность подавления стадии частотной синхронизации, если генератор, служащий для генерирования задающей частоты в аналого-цифровом преобразователе приемника, обладает достаточной точностью. Важно отметить, что стадия сбора показаний частотной синхронизации следует после стадии сбора показаний временной синхронизации и предусматривает расчет погрешности частоты дискретизации на основе угла корреляции в момент ее максимальной величины, для чего используется точка, расположенная посередине плоского участка кривой максимальных величин, согласно следующему алгоритму: где М обозначает интерполяционный коэффициент интерполятора, который обычно включен в состав передатчика головного узла, и прореживающий коэффициент прореживателя, обычно входящего в состав пользовательских приемников, fc обозначает частоту несущей, fs обозначает частоту дискретизации,a fs обозначает погрешность частоты дискретизации, при этом угол корреляции вычисляют в оптимальный момент с использованием арктангенса отношения воображаемой части и действительной части на основе предыдущего отношения fs, используя в качестве оптимального момента точку, расположенную посередине плоского участкакривой максимальных величин, и многократно повторяя такие действия до тех пор, пока расчетная величина погрешности частоты дискретизации не будет ниже определенной пороговой величины. В то же время, на стадии слежения за показаниями частотной синхронизации предусмотрено использование вращателя для компенсации поворота совокупности на каждой несущей или продолжение исправления погрешности частоты с использованием корректора, или одновременное применение обеих форм слежения. Первый способ осуществления слежения за показаниями частотной синхронизации заключается в умножении принятого сигнала на показатель вращателя, который компенсирует поворот совокупности-3 005669 на каждой несущей в частотной области, при этом показатель вращателя вычисляют путем вычисления скорости поворота совокупности на каждой частоте. Для вычисления скорости поворота совокупности на каждой несущей в предлагаемом в изобретении способе предусмотрена передача "сетки" во время передачи данных по нисходящему каналу, заключающаяся в том, что на определенных несущих передаются символы фиксированной модуляции (предпочтительно, на одной несущей с низким отношением сигнал-шум, необходимым для демодуляции). Поскольку положение несущих, модулированных фиксированной модуляцией, может меняться, по истечении определенного времени все несущие в какой-то момент времени будут принудительно модулированы фиксированной модуляцией (иными словами, будут несущими, модулированными фиксированной модуляцией). Пользователям заранее не известно, являются ли они адресатами модулированной информации на таких несущих. На основе максимальной величины поворота на самой высокой несущей устанавливается максимальный период, разделяющий два последовательных измерения угла на каждой частоте, за счет чего измерения такого угла не приводят к возникновению переполнения. NT обозначает максимальное количество символов между двумя последовательными измерениями угла на одной определенной несущей,при этом фиксированная модуляция может быть распределена среди N несущих таким образом, что все несущие один раз на протяжении следования NT символов модулированы такой фиксированной модуляцией, а т.е. на протяжении следования NT символов суммарное количество несущих, модулированных фиксированной модуляцией с каждым символом, равно общему количеству несущих в системе. Ni в предыдущем уравнении обозначает количество несущих, модулированных фиксированной модуляцией с символом i, в результате чего через NT символов получают новый результат измерения скорости поворота на каждой из несущих. Оборудование головного узла продолжает использовать несущие, модулированные фиксированной модуляцией, для передачи информации (как и все остальные несущие) с тем отличием, что на таких частотах используется фиксированная модуляция. Поскольку как пользователям, которым адресована информация, полученная на несущих, модулированных фиксированной модуляцией, так и всем остальным пользователям известен тип модуляции, использованный на таких несущих, они могут восстановить такую информацию с тем, чтобы рассчитать скорость поворота несущих, модулированных фиксированной модуляцией. Пользовательские терминалы демодулируют информацию на несущих, модулированных фиксированной модуляцией (за счет того, что им известна использованная модуляция, и независимо от того, адресована ли им информация), и рассчитывают угловое отклонение, сравнивая точку полученной совокупности с расчетной точкой переданной совокупности. Путем вычисления разности между таким углом и углом, вычисленным на NT символов раньше (в зависимости от параметров конфигурации фиксированной модуляции), и деления количества символов между двумя измерениями получают расчетную величину скорости поворота совокупности на каждой несущей, для которой рассчитаны углы поворота. Второй способ осуществления слежения за показаниями частотной синхронизации предусматривает расчет погрешности частоты путем измерения угла поворота совокупности на каждой из несущих за период одного символа и исправления такой погрешности с использованием корректора погрешности частоты, при этом измеренная величина соответствует углам корреляции. Описанный способ обеспечивает надежную частотную и временную синхронизацию при передаче данных по нисходящему каналу электрической сети. Ниже настоящее изобретение более подробно рассмотрено на примере некоторых, не ограничивающих его объем вариантов его осуществления со ссылкой на прилагаемые чертежи. Краткое описание чертежей На прилагаемых к описанию чертежах показано: на фиг. 1 - оконечная часть функциональных блоков передатчика головного узла для передачи синхронизирующих последовательностей и данных согласно способу по настоящему изобретению, при этом остальные элементы передатчика не показаны, поскольку они не имеют существенно значения для пояснения сущности настоящего изобретения; на фиг. 2 - начало работы пользовательских приемников, обнаруживающих синхронизирующие последовательности, на нисходящем канале для осуществления синхронизации приемников согласно способу по изобретению с использованием управляемого напряжением кварцевого генератора для осуществления частотной коррекции; на фиг. 3 - другой возможный пример осуществления синхронизации приемников согласно способу по изобретению с использованием устройства восстановления дискретизированного сигнала и фильтров для осуществления частотной коррекции;-4 005669 на фиг. 4 - графическое представление типичного примера умножения корреляции и мощности на пороговую величину дискретных импульсов, принимаемых приемников, при этом ясно видно, что на протяжении следования множества дискретных импульсов в приемнике сохраняется максимальная величина корреляции; на фиг. 5 - примеры синхронизирующих последовательностей, состоящих из двух идентичных ОЧУ-символов и периодически передаваемых по нисходящему каналу через каждые S символов; на фиг. 6 - схема, иллюстрирующая вычисление корреляции и мощности на основе дискретных импульсов, поступающих в приемник через кольцевые буферы; на фиг. 7 - схема возможного примера осуществления изобретения, в котором вычисление мощности и корреляции осуществляется на основе дискретных импульсов, поступающих в приемник в данный момент, и на фиг. 8 - графическое представление поворота КФМн-совокупности, происходящего при приеме вследствие различия между дискретными импульсами в начале символа и дискретным импульсом, принимаемым приемником в данный момент. Описание предпочтительного варианта осуществления изобретения Далее изобретение описано на основе перечисленных выше фиг. 1-8 чертежей. Как указано выше, изобретение применимо в двунаправленной связи по электрической сети между головным узлом и множеством пользователей (пользовательских терминалов), а его задачей является обеспечение способа синхронизации в системе многоточечной передачи данных с использованием в качестве системы модуляции ортогонального частотного уплотнения (ОЧУ-модуляции), например, как это описано в заявке на патент Испании 20003024. Из предшествующего уровня техники известно, что передатчик головного узла осуществляет преобразование передаваемых сигналов из частотной во временную область, используя для этого модуль 1,который осуществляет обратное дискретное преобразование Фурье (ОДПФ). Символы ортогонального частотного уплотнения (ОЧУ-символы) поступают в основной полосе частот и во временной области в существующий модуль 1. На выходе ОДПФ сигнал разделен на фазу 1 (например, действительную часть выходного сигнала) и квадратуру Q (воображаемую часть сигнала), которые поступают в генератор 2 циклического префикса, прибавляющий циклический префикс к каждому ОЧУ-символу с тем, чтобы избежать интерференции символов и поглотить возможные эхо-сигналы за счет приема символа на множестве каналов, что обычно имеет место при модуляции такого типа. Предварительно пройдя через интерполятор 3, имеющий интерполяционный коэффициент М, сигнал затем поступает в ФК-модулятор 4 (осуществляющий фазовую и квадратурную модуляцию). После этого подвергнутый фазовой и квадратурной модуляции сигнал поступает в сумматор 5, выход которого соединен с аналого-цифровым преобразователем 6, в свою очередь, соединенным с рядом аналоговых компонентов (сепаратором, усилителями и фильтрами), которые позволяют ввести сигнал в электрическую сеть для его передачи множеству пользователей, приемники таких пользователей принимают сигнал, поступающий по сети (используя сепаратор и ряд аналоговых фильтров), и направляют сигнал в аналого-цифровой преобразователь 7, соединенный с ФК-демодулятором 8, который направляет сигнал с демодулированной фазой и квадратурой (Ф и К) в прореживатель 9, осуществляющий прореживание на основе коэффициента М с использованием фильтра 10 нижних частот, после чего сигнал через фильтр 12 восстановления дискретизированного сигнала (если используется восстановление дискретизированного сигнала) поступает в экстрактор 11 циклического префикса, а затем модуль 13, осуществляющий дискретное преобразование Фурье (ДПФ), преобразует сигнал из временной области в частотную. В одном из примеров вследствие различий между оборудованием генераторов 28 а и 29, зависящих от формы использования такого оборудования, возникает погрешность частоты дискретизации, заключающаяся в том, что частота fs дискретизации преобразователя 6 точно не соответствует частоте дискретизации преобразователя 7. В математическом выражении частота дискретизации у приемника равна fs +fs, где fs обозначает изменение частоты вследствие указанных выше различий между оборудованием генераторов. Погрешность частоты дискретизации приводит к тому, что при модуляции совокупность на каждой из несущих поворачивается посимвольно. Помимо этого, погрешности частоты дискретизации могут также приводить к ослаблению и шуму в системе, в связи с чем необходимо корректировать такие погрешности за счет синхронизации при приеме с тем, чтобы частота дискретизации преобразователей 7 пользователей была равна частоте дискретизации преобразователя 6. Кроме того, в конкретном примере осуществления изобретения у синусоид, используемых для ФКдемодуляции в демодуляторах 8, также имеется фазовая погрешность ао. В этом случае фазовая погрешность приводит к постоянному повороту совокупности на каждой частоте и, вследствие этого, может быть скорректирована с использованием корректора, при этом не требуется осуществлять специальную коррекцию такой погрешности на уровне синхронизации. Еще одна сложность заключается в том, что приемникам точно неизвестен начальный дискретный импульс ОЧУ-символа, что является серьезной проблемой, поскольку без такой информации невозможно точно знать количество дискретных импульсов, относящихся к циклическому префиксу, и количество-5 005669 дискретных импульсов, которые должны быть введены в модуль 13, осуществляющий преобразование из временной области в частотную. Если в количество дискретных импульсов, введенных в модуль 13 ДПФ,входят импульсы множества различных символов, в системе происходит существенное ухудшение отношения сигнал-шум, что, в свою очередь, приводит к интерференции несущих и символов, во избежание чего необходимо, чтобы приемникам пользователей было известно, какому символу соответствует каждый дискретный импульс. Таким образом, необходимо осуществлять как временную, так и частотную синхронизацию приемников пользователей с тем, чтобы модуль 15 управления синхронизацией мог извлекать синхронизирующие последовательности, передаваемые передатчиком, и производить расчет погрешности частоты дискретизации и момента начала ОЧУ-символов, используя дискретные импульсы, полученные на выходе прореживателя 9, что и происходит согласно описанному ниже способу. В способе по настоящему изобретению предусмотрено генерирование синхронизирующих последовательностей с использованием двух идентичных синхронизирующих символов 16, которые головной узел периодически передает по нисходящему каналу пользовательским приемникам. Оба идентичных синхронизирующих символа используются для одновременного расчета погрешности частоты дискретизации и начала каждого символа при приеме. Переданная на несущих информация, которая использована в обоих синхронизирующих символах,может представлять собой фиксированную или псевдослучайную последовательность, но в любом случае она должна быть одинаковой для обоих символов и должна быть известна каждому приемнику. Для осуществления синхронизации при приеме необходимо, в первую очередь, обнаружить синхронизирующую последовательность, для чего модуль 15 управления синхронизацией применяет к дискретным импульсам, принятым на выходе прореживателя 9, критерии наибольшего правдоподобия. Такой критерий известен из уровня техники по другим областям применения и описывается следующим алгоритмом:(,)=(2 + (,гдеобозначает момент начала дискретного импульса, f (Ts + ТCP) (где Ts обозначает время передачи и приема символа, а ТCP обозначает время циклического префикса), т.е. разность между генераторами передатчика и приемников, умноженную на разность во времени между двумя интервалами, сопоставленными с целью нахождения сходства, а где l обозначает количество дискретных импульсов в интервалах, обладающих искомым сходством, а n обозначает количество дискретных импульсов вне фазы. В данном случае l=N, a n=N+L, где N обозначает количество дискретных импульсов одного из символов синхронизирующей последовательности, a L обозначает количество дискретных импульсов циклического префикса. Таким образом,обозначает корреляцию двух интервалов из N дискретных импульсов, разделенных N+L импульсами, а , обозначает мощность N дискретных импульсов. Критерий наибольшего правдоподобия достигает своего максимума, когда косинус и показатель корреляционного модулямаксимальны. Для временной синхронизации используется корреляционный максимум , вследствие чего становится возможным рассчитать оптимальный момент 0 ПТ. При частотной синхронизации косинус имеет максимальную величину, когда гдеобозначает расчетную величину сдвига частоты при транспонировании частоты сигнала в полосу частот, т.е. одинаковой погрешности частоты на всех несущих сигнала. Если принять, что в предыдущем уравнении n=0, то fs1/(s + Тср), и при подстановке вместосоответствующей величины выражение приобретает следующий вид:(опт)=-2f(TS+TCP). Поскольку данный вывод предполагает транспонирование аналогового сигнала в полосу частот,сдвиг одинаков на всех несущих. Погрешности такого типа исключены в настоящем изобретении, поскольку не используется транспонирование аналогового сигнала в полосу частот. Несмотря на такую дискретизацию погрешности частоты имеют место, в результате чего происходит сдвиг частоты, различающийся на каждой из несущих сигнала. Тем не менее, с учетом того, что такой сдвиг имеет одинако-6 005669 вый знак на всех несущих,пропорционально величине измеренной погрешности и может служить средством оценки. В этом случае угол корреляции равен где М обозначает интерполяционный коэффициент и коэффициент прореживания, которые используются до и после преобразования при передаче и приеме соответственно, a fc обозначает несущую цифрового сигнала. Частотная погрешность fs может быть легко выведена из предыдущего уравнения при условии,что известны все остальные множители уравнения. Синхронизирующие последовательности, состоящие из двух идентичных синхронизирующих символов 16, отделены фиксированным интервалом времени с тем, чтобы повысить их устойчивость и снизить вероятность сбора показаний синхронизации вследствие импульсных помех, за счет чего приемник может начинать синхронизацию в любой момент от начала такой последовательности. На фиг. 4 показан пример, в котором два синхронизирующих символа 16 периодически передаются через каждые S символов. Для обнаружения синхронизирующей последовательности в настоящем изобретении используется упомянутая выше величина, при этом в оптимальный момент корреляция (величина ) и мощность (величина ) равны, после чего мощность сигнала используется в качестве пороговой величины для определения максимума корреляции. Заданным условием искомого максимума корреляции является С. Пороговая величина С является фиксированной с тем, чтобы минимизировать вероятность сбора показаний синхронизации вследствие импульсных помех. При наличии двух одинаковых синхронизирующих импульсов 16 теоретически у корреляции должен быть не единственный максимум, а пиковая величина и плато, как это показано на фиг. 4. Ширина такого плато равна длительности дискретных импульсов, входящих в циклический префикс, без учета межсимвольной интерференции (МСИ). Любой из таких дискретных импульсов может быть принят за окончание синхронизирующего символа, поскольку в случае использования любого другого импульса произойдет лишь расфазировка, которая будет одинакова для всех символов на выходе модуля 13 ДПФ. Такая расфазировка может быть легко скорректирована корректором и не вызывает ухудшения приема. Центральный дискретный импульс плато принимается за оптимальную точку временной синхронизации и используется для обнаружения пиковых значений. Корреляция вычисляется многократно, для чего в модуле 15 управления синхронизацией предусмотрен кольцевой буфер 17 длиной N импульсов, в котором хранится произведение текущего дискретного импульса на сопряженный дискретный импульс, поступивший на N+L импульсов раньше, при этом текущий момент представлен на фиг. 6 вертикальной линией 18. Полученную величину прибавляют к текущей величине корреляции, а величину, поступившую из буфера, вычитают из нее, в результате чего в корреляции учтена сумма всех положений хранящихся в буфере величин. Помимо буфера 17 дискретные импульсы также должны храниться в буфере 18 длиной n=N+L импульсов, в результате чего получают упомянутое выше произведение. В математической форме алгоритм вычисления корреляции выражен следующим образом:P(d)=P(d-1)+(rnrd-(N+L-(rd-Nrd-(N+L)-N),где P(d) обозначает корреляцию, rd обозначает текущий дискретный импульс, rd-N обозначает дискретный импульс, поступивший в приемник на N импульсов раньше, a rd-(N+L) обозначает комплексное сопряжение дискретных импульсов, поступивших в приемник на N+L импульсов раньше, rd-(N+L)-N обозначает комплексное сопряжение дискретных импульсов, поступивших в приемник на 2N+L импульсов раньше. Вычисление мощности также может осуществляться многократно аналогично тому, как вычисляется корреляция. В данном случае используется следующий алгоритм вычисления мощности:R(d) = R(d-1) + rd2rd-N2,где R(d) обозначает мощность, rd обозначает текущий дискретный импульс, а rd-N обозначает дискретные импульсы, поступившие в приемник на N импульсов раньше. На фиг. 7 показана возможная реализация таких вычислений, при этом верхняя ветвь 20 служит для вычисления мощности с использованием предыдущего алгоритма, а нижняя ветвь 21 - для вычисления корреляции с использованием ранее приведенного алгоритма. В обеих ветвях 20 и 21 используются блоки 22 задержки Z-N, Z-1, Z-(N+L), которые задерживают на выходе некоторые дискретные импульсы, отображающие свой показатель, за счет чего получают уже упоминавшиеся итерационные формулы. Блок 23 перемножения умножает вычисленную таким способом мощность на пороговую величину С, а результат поступает в компаратор 24, который сравнивает его с полученной величиной корреляции,за счет чего детектор 25 пиковых значений обнаруживает пики синхронизации, показанные на фиг. 3, и на основе корреляции обнаруженного пика вычисляется угол такой величины с использованием арктангенса, предпочтительно с использованием схемы 26 CORDIC. Таким образом, для сбора показаний временной синхронизации приемник первоначально ожидает обнаружения синхронизирующей последовательности согласно описанной выше процедуре, а после ее-7 005669 обнаружения ожидает поступления другой синхронизирующей последовательности на заданное количество S символов позже. Если вторая синхронизирующая последовательность не поступает, процесс синхронизации возвращается в исходное состояние. В то же время, если первая из двойных синхронизирующих последовательностей была обнаружена правильно, приемник ожидает поступления другой синхронизирующей последовательности, и подобным образом обнаруживает определенное количество последовательных синхронизирующих последовательностей, после чего считается, что обнаруженные синхронизирующие последовательности действительно существуют. Если на протяжении какого-либо дискретного интервала ожидаемая синхронизирующая последовательность не обнаружена, процесс снова возвращается в исходное состояние. Если последовательность синхронизирующих символов обнаружена вне ожидаемого интервала, она игнорируется. Если приемники оснащены высококачественным генератором, генерирующим частоту дискретизации, стадия сбора показаний частотной синхронизации становится излишней. В этом случае для вычисления максимальных величин используется лишь действительная часть корреляции, поскольку воображаемая часть практически равна нулю, в связи с чем нет необходимости ее рассчитывать. В то же время, если генератор, генерирующий частоту дискретизации, не отличается достаточной точностью, то по завершении сбора показаний временной синхронизации с использованием каждой синхронизирующей последовательности рассчитывается погрешность частоты, которую корректирует частотный корректор, а именно - кварцевый генератор 28, управляемый напряжением (КГУН), в одном из вариантов осуществления изобретения используемый при приеме вместо фиксированного генератора,такого как генератор 28 а, или устройство 27 восстановления дискретизированного сигнала и фильтр 12 восстановления дискретизированного сигнала, подробнее описанные ниже. Для оценки частотной погрешности вычисляется угол корреляции, предпочтительно с использованием CORDIC 26 или упомянутой ранее аналогичной схемы, которая вычисляет арктангенс отношения воображаемой и реальной частей корреляции. После вычисления угла корреляции по уравнению (А) вычисляется fs, как это описано выше. На основе вычислений частотной погрешности начинается процесс итерационной частотной коррекции и расчета погрешности, который завершается, когда расчетная погрешность оказывается ниже установленной пороговой величины. В одном из примеров осуществления изобретения для коррекции частоты дискретизации у аналогоцифрового преобразователя 7 используется управляемый напряжением генератор 28 под управлением модуля 15 управления синхронизацией, использующий вычисления с целью получения соответствующей частоты дискретизации. Частотный корректор также может быть выполнен в виде устройства 27 восстановления дискретизированного сигнала, воздействующего на ФК-демодулятор 8. В этом случае необходимы фильтры 12 восстановления дискретизированного сигнала, адаптирующие восстановленный дискретизированный сигнал до обнаружения циклического префикса. Такие фильтры не нужны в случае применения иного средства приблизительной частотной коррекции, как, например, управляемого напряжением кварцевого генератора 28, который генерирует при приеме частоту дискретизации. На стадии слежения за показаниями временной синхронизации передатчик головного узла работает в обычном режиме, т.е. передает данные. С учетом того, что на стадии слежения известно количество полученных синхронизирующих последовательностей, в том случае, если обнаружено, что одна из последовательностей отсутствует, отсчет отсутствующих синхронизирующих последовательностей увеличивается соответствующим образом. Если отсчет достигает установленного предела, стадия сбора осуществляется повторно. При поступлении синхронизирующей последовательности отсчет дискретных импульсов, которые должны поступить в модуль 13, меняется, а модуль 15 управления синхронизацией воздействует на экстрактор 11 циклического префикса и модуль 13, разрешая поступление выбранных дискретных импульсов. Если момент начала символа был изменен, необходимо осуществить повторную коррекцию с использованием корректора, поскольку при замене начала символа другим дискретным импульсом циклического префикса происходит расфазировка. С этой целью после синхронизирующей последовательности добавляется несколько символов коррекции, которые используются в корректоре для выполнения указанной коррекции. Что касается стадии слежения за показаниями частотной синхронизации, необходимо отметить,что, несмотря на наличие частотного корректора, всегда присутствует остаточная погрешность частоты дискретизации, вызывающая поворот положения точек совокупности в процессе ее демодуляции при приеме. Такая погрешность является накапливающейся, иными словами, если после какого-либо символа угол поворота совокупности на определенной несущей составляет 0,3, через 10 символов угол поворота составит 3. На фиг. 8 показано положение дискретного импульса без погрешности, отмеченное звездой, точка совокупности (повернутой) после десяти символов, отмеченная кругом, и точка совокупности после 50 символов, отмеченная крестиком.-8 005669 Если остаточная погрешность не скорректирована, наступит момент, когда точки совокупности перейдут в следующий квадрант и будут ошибочно восприниматься при приеме как точки, переданные в другом квадранте. Для слежения за остаточной погрешностью и ее коррекции в частотной области используется вращатель, входящий в модуль коррекции. Кроме того, с использованием вращателя может быть рассчитана погрешность частоты дискретизации, и такая расчетная величина может быть использована на входе частотного корректора независимо от того, является ли он устройством 27 восстановления дискретизированного сигнала с фильтрами или управляемым напряжением кварцевым генератором 28. Расчет, осуществляемый вращателем, является более точным, чем полученный с использованием арктангенса, что следует из вышеизложенного. Для использования вращателя необходимо вычислить скорость поворота совокупности на каждой частоте в частотной области, после чего такой поворот компенсируется для каждого поступившего символа. Поскольку частотная характеристика электрической сети за время следования двадцати символов отклоняется незначительно (за счет выбранного в системе временного обозначения), можно предположить, что поворот совокупностей на несущих за определенное время вызван лишь остаточной погрешностью при расчете частоты дискретизации, а не изменениями амплитудно-частотной характеристики канала. Именно на данном предположении основан один из вариантов изобретения, в котором сказано, что воздействие, оказываемое каналом на угол поворота на протяжении 16 символов, является пренебрежимо малым по сравнению с влиянием на угол поворота погрешности частоты дискретизации. Исходя из такого допущения, посимвольный поворот фазы несущей вследствие погрешности частоты дискретизации за кратный k момент вычисляется следующим образом: где fs обозначает номинальную частоту, fs обозначает погрешность частоты дискретизации, N обозначает количество дискретных импульсов в символе, fc обозначает частоту, использованную для ФКмодуляции, М обозначает прореживающий коэффициент прореживателей 9 и L обозначает количество дискретных импульсов в циклическом префиксе. Для коррекции поворота вследствие остаточной частотной погрешности принятый сигнал должен быть умножен на сложную экспоненциальную функцию с углом, противоположным расчетному углу поворота. Для вычисления скорости поворота совокупности на каждой несущей в предлагаемом в изобретении способе предусмотрена передача "сетки" по нисходящему каналу, заключающаяся в том, что на определенных несущих (предпочтительно, на одной несущей с низким отношением сигнал-шум, необходимым для демодуляции) после синхронизирующих последовательностей передаются символы фиксированной модуляции. Поскольку положение несущих, модулированных такой фиксированной модуляцией,может меняться, по истечении определенного времени все несущие в какой-то момент времени будут принудительно модулированы фиксированной модуляцией (иными словами, будут несущими, модулированными фиксированной модуляцией). Пользователям неизвестна информация, передаваемая на несущих, независимо от того, адресована ли им такая информация. С учетом того, что максимальный поворот совокупностей на каждой несущей с большей частотой является фиксированной величиной, заложенной в системе, а величина fs, представляющая погрешность частоты дискретизации, зафиксирована в силу различий между генераторами передатчика и генераторами приемника различного оборудования, максимальный период между двумя последовательными измерениями угла поворота на каждой частоте также зафиксирован, за счет чего осуществляется расчет скорости поворота на каждой частоте, не приводящий к наложениям или переполнениям, когда разность фаз двух последовательно измеренных углов поворота на одной несущей составляет менее 180 ( радиан). В математическом выражении данный период рассчитывается по следующей формуле: Величину f maxerror можно вывести из формулы вычисления угла поворота посимвольно на несущей за кратный k момент, т.е. где Рmaxerror обозначает показатель самой высокой несущей, fs обозначает номинальную частоту дискретизации у генераторов различного оборудования, fs обозначает отклонение частоты дискретизации, N обозначает количество дискретных импульсов в символе, fc обозначает несущую и М обозначает прореживающий коэффициент. С учетом полной величины такого максимального периода, поделенной между двумя последовательно измеренными углами поворота на различных несущих и периодом символа, можно записать где NT обозначает максимальное количество символов между двумя последовательными измерениями угла на данной несущей, за счет чего фиксированная модуляция может быть распределена среди N несущих системы, для чего необходимо, чтобы количество несущих, модулированных фиксированной модуляцией, на символ, умноженное на количество символов фиксированной модуляции за один период измерения (величина которого меньше или равна NT), равнялось количеству N несущих в системе. Два возможных применения распределения фиксированной модуляции заключаются в том, что все несущие принудительно становятся несущими, модулированными фиксированной модуляцией через один символ, или фиксированная модуляция распределяется за период символа среди максимального количества N/NT несущих, в результате чего на протяжении максимального NT символов угол поворота измеряется на всех несущих, а спустя Nt символов осуществляется новое измерение. Оборудование головного узла продолжает использовать несущие, модулированные фиксированной модуляцией, для передачи необходимой информации (как и на всех остальных несущих) с тем отличием,что на таких частотах используется фиксированная модуляция. Поскольку как пользователям, которым адресована информация, полученная на несущих, модулированных фиксированной модуляцией, так и всем остальным пользователям известен тип модуляции, использованный на таких несущих, они могут восстановить такую информацию с тем, чтобы рассчитать скорость поворота несущих, модулированных фиксированной модуляцией. Пользовательские терминалы демодулируют информацию на несущих, модулированных фиксированной модуляцией (за счет того, что им известен тип использованной модуляции, и независимо от того,адресована ли им информация), и рассчитывают угловое отклонение, сравнивая точку полученной совокупности с расчетной точкой переданной совокупности. Путем вычисления разности между таким углом и углом, вычисленным на определенное количество символов раньше (в зависимости от параметров конфигурации фиксированной модуляции), и деления количества символов между двумя измерениями получают расчетную величину скорости поворота совокупности на несущих, для которых рассчитаны углы поворота. Например, если предположить, что период составляет 16 символов, то через каждые 16 символов все несущие в какой-то момент будут использованы как несущие, модулированные фиксированной модуляцией, если общее количество несущих составляет 32, две несущие могут использоваться как несущие, модулированные фиксированной модуляцией, при продолжающемся посимвольном изменении положения. В таком случае головной узел будет продолжать использовать такие несущие для передачи информации, но для ее модуляции будет использоваться система модуляции с низким отношением сигналшум, необходимым при демодуляции (например, КФМн-модуляция), а пользовательские терминалы будут демодулировать такую информацию (независимо от того, являются ли они ее адресатами, поскольку им известно, что она модулирована с использованием КФМн-модуляции). По окончании периода следования 16 символов осуществляется новое измерение угла поворота на всех несущих и новый расчет скорости поворота на каждой частоте. В этом случае для вычисления скорости поворота на несущей сначала демодулируются символы КФМн-модуляции, переданные на такой несущей. Угол, образованный точкой принятой совокупности и осями координат, вычитается из угла точки переданной совокупности, что позволяет узнать угловое отклонение на данной несущей. Через каждые 16 символов вычисляется новый угол для данной несущей, а разность между величиной последнего вычисленного угла и угла, вычисленного на 16 символов раньше, делится на 16, чтобы определить скорость поворота в пересчете на символ. Результаты такого расчета и сделанных ранее расчетов могут быть переданы в фильтр нижних частот,чтобы исключить отклонения вследствие внезапных изменений в канале и уменьшить влияние помех на результаты расчетов. Для ускорения процесса сходимости может осуществляться усреднение результатов вычисления для множества несущих. Коррекция, осуществляемая с использованием вращателя, заключается в умножении сигнала на сложную экспоненциальную функцию в частотной области, иными словами, на выходе модуля 13, в частности в корректоре. Для простоты и с учетом того, погрешность на данной стадии является небольшой,действительная часть сложной экспоненциальной функции может быть принята за близкую к 1, а воображаемая часть - за угол в радианах.- 10005669 Вычисление средней величины поворота на всех несущих дает следующий результат: Такая средняя величина является расчетной величиной частотной погрешности, которая может быть использована для точной корректировки такой частотной погрешности. Для обеспечения большей точности расчетная величина используется на входе частотного корректора независимо от того, является ли он устройством 27 восстановления дискретизированного сигнала с фильтрами 12 или управляемым напряжением кварцевым генератором 28. В другом варианте осуществления изобретения расчет осуществляется на основе угла корреляции, полученного с использованием арктангенса с использованием соответствующей схемы, предпочтительно 26 CORDIC, упоминавшейся выше. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ синхронизации передачи данных множеству пользователей в нисходящем канале многоточечной системы передачи данных с использованием ОЧУ-модуляции в процессе двунаправленной связи по электрической сети между головным узлом и множеством пользователей, в котором предусмотрено средство добавления и обнаружения циклического префикса из ОЧУ-символов, имеющее интерполяторы и прореживатели передающих и принимающих систем оборудования, и транспонирование цифрового сигнала в полосу частот, при этом в информацию, передаваемую по нисходящему каналу, связывающему головной узел с пользовательскими терминалами, включены синхронизирующие последовательности,обеспечивающие частотную и временную синхронизацию при приеме, отличающийся тем, что для генерирования синхронизирующих последовательностей используются два идентичных синхронизирующих символа (16), которые оборудование головного узла периодически передает по нисходящему каналу всем пользовательским терминалам, которые обнаруживают такие синхронизирующие последовательности при приеме, выборочно рассчитывают и корректируют частоты дискретизации в аналого-цифровых преобразователях (7), входящих в приемники пользовательских терминалов, или осуществляют восстановление дискретизированного цифрового сигнала (частотную синхронизацию) и одновременный расчет момента начала каждого ОЧУ-символа (временную синхронизацию). 2. Способ по п.1, отличающийся тем, что распознавание синхронизирующих последовательностей осуществляется на основе критериев наибольшего правдоподобия таким образом, что временная синхронизация начинается с вычисления максимума корреляции дискретных импульсов двух принятых символов, при этом такой максимум соответствует средней точке плоского участка кривой пиковых значений корреляции, размер которого в пересчете на дискретные импульсы равен количеству дискретных импульсов циклического префикса без учета межсимвольной интерференции (МСИ), а частотная синхронизация осуществляется путем вычисления угла такой корреляции в момент, определенный как максимум корреляции. 3. Способ по п.2, отличающийся тем, что максимум корреляции вычисляется путем обнаружения пиковых значений корреляции, которые превосходят пороговую величину, которая соответствует результату умножения мощности на постоянную величину С, при этом за такой максимум принимается средняя точка плоского участка кривой пиковых значений корреляции, размер которого в пересчете на дискретные импульсы равен количеству дискретных импульсов циклического префикса без учета межсимвольной интерференции (МСИ), постоянная величина С зафиксирована, чтобы минимизировать вероятность возникновения сигналов ложной тревоги, корреляция рассчитывается с использованием алгоритма а для вычисления мощности используется алгоритм где (m) обозначает корреляцию в момент дискретного импульса m, а (m) обозначает мощность в момент дискретного импульса m, r(k) обозначает дискретный импульс, принятый в момент k, r (k+n) обозначает комплексное сопряжение принятого дискретного импульса в момент k+n, n = N+L, а l = n, при этом N обозначает количество дискретных импульсов одного из символов синхронизирующей последовательности, a L обозначает количество дискретных импульсов циклического префикса. 4. Способ по пп.2 и 3, отличающийся тем, что вычисление корреляции и мощности осуществляется многократно, при этом принятые дискретные импульсы и предпочтительно частичные произведения текущего дискретного импульса и сопряженного дискретного импульса, поступившего на N+L дискретных импульсов раньше, хранятся в приемнике для вычисления корреляции и мощности с использованием алгоритмовR(d) = R(d-1) + rd2-rd-N2,где P(d) обозначает корреляцию, R(d) обозначает мощность, r(d) обозначает текущий дискретный импульс, rd-N обозначает дискретный импульс, поступивший в приемник на N дискретных импульсов раньше, rd-(N+L) обозначает комплексное сопряжение дискретного импульса, принятого на N+L дискретных импульсов раньше, a rd-(N+L)-N обозначает комплексное сопряжение дискретных импульсов, принятых на 2N+L дискретных импульсов раньше. 5. Способ по п.3, отличающийся тем, что в случае, если частотная погрешность оказывается меньше предварительно установленной пороговой величины, для упрощения вычислений используется лишь действительная часть корреляции. 6. Способ по любому из пп.3-5, отличающийся тем, что для обнаружения синхронизирующей последовательности величина корреляции сравнивается с мощностью, умноженной на величину С, чтобы минимизировать вероятность сигнала ложной тревоги, а искомая синхронизирующая последовательность и оптимальный момент дискретного импульса отвечают заданному условию С, где С обозначает коэффициент, на который умножается мощность, а их произведение используется в качестве пороговой величины. 7. Способ по п.1, отличающийся тем, что два идентичных символа синхронизации выборочно состоят из фиксированной или псевдослучайной информации. 8. Способ по любому из пп.1-6, отличающийся тем, что синхронизация частоты дискретизации и временная синхронизация при приеме состоят из стадии сбора показаний синхронизации и стадии слежения за показаниями синхронизации, при этом стадия сбора предусматривает поиск определенного количества синхронизирующих последовательностей, приблизительную коррекцию частотной погрешности и переход к стадии слежения как в случае частотной, так и временной синхронизации. 9. Способ по п.8, отличающийся тем, что стадия сбора показаний временной синхронизации предусматривает стадию ожидания до обнаружения синхронизирующей последовательности с определенным количеством символов или синхронизирующих последовательностей в ожидаемом положении и в ожидаемые моменты с последующим переходом к стадии слежения, чтобы снизить вероятность сбора показаний синхронизации вследствие сигнала ложной тревоги. 10. Способ по пп.8 и 9, отличающийся тем, что после сбора показаний временной синхронизации предусмотрена стадия слежения за показаниями временной синхронизации, заключающаяся в обнаружении синхронизирующих последовательностей, переданных пользователям по нисходящему каналу, учете количества неполученных последовательностей, при этом в случае превышения определенного предела происходит возврат к стадии сбора. 11. Способ по любому из пп.8-10, отличающийся тем, что на стадии слежения за показаниями временной синхронизации при поступлении каждой новой синхронизирующей последовательности происходит изменение момента начала ОЧУ-символа, при этом такое изменение осуществляется путем варьирования в группе дискретных импульсов, использованных для преобразования сигналов из временной области в частотную область, предусмотренного пользовательскими приемниками и способного привести к изменению фазы или повороту демодулированных совокупностей, что корректируется за счет соответствующей коррекции, для чего предпочтительно после синхронизирующих последовательностей передаются корректирующие последовательности. 12. Способ по п.8, отличающийся тем, что стадия сбора показаний частотной синхронизации подавляется в том случае, если генератор, используемый для генерирования частоты дискретизации в аналогоцифровом преобразователе приемника, обладает достаточной точностью. 13. Способ по п.8, отличающийся тем, что после стадии сбора показаний временной синхронизации следует стадия сбора показаний частотной синхронизации, на которой предусмотрен расчет погрешности частоты дискретизации на основе угла корреляции в момент ее максимальной величины, для чего используется точка, расположенная посередине плоского участка кривой максимальных величин, согласно следующему алгоритму: где М обозначает интерполяционный коэффициент и прореживающий коэффициент, fc обозначает несущую, fs обозначает частоту дискретизации, a fs обозначает погрешность частоты дискретизации, при этом на данной стадии дополнительно осуществляют коррекции с использованием частотного корректора, выборочно состоящего из управляемого напряжением генератора (28) или устройства (27) восстановления дискретизированного сигнала с соответствующими фильтрами (12), для чего на основе предыдущего алгоритма вычисляют углы корреляции в момент ее максимальной величины, вычисляют арктангенс отношения воображаемой части и действительной части и с использованием предыдущего алгоритма получают величину fs, при этом многократно повторяют такие действия до тех пор, пока расчетная величина погрешности частоты дискретизации не будет ниже определенной пороговой величины. 14. Способ по любому из пп.8-13, отличающийся тем, что на стадии слежения за показаниями частотной синхронизации предусмотрено умножение принятого сигнала на показатель вращателя, который- 12005669 компенсирует поворот совокупности на каждой несущей в частотной области, при этом показатель вращателя вычисляют путем вычисления скорости поворота совокупности на каждой частоте. 15. Способ по п.14, отличающийся тем, что для вычисления скорости поворота совокупности на каждой несущей во время передачи данных по нисходящему каналу, на некоторых несущих, известных как несущие, модулированные фиксированной модуляцией, положение которых меняется во времени,когда такие несущие используются для передачи информации, периодически передается сетка (символы фиксированной модуляции), принуждающая головной узел использовать фиксированную модуляцию предпочтительно с низким отношением сигнал-шум, необходимым для демодуляции, а пользователям известно положение несущих, модулированных фиксированной модуляцией, и они могут осуществлять контроль качества линии передачи данных на таких несущих, зная использованный на них тип модуляции, независимо от того, является ли пользователь адресатом информации, переданной на таких несущих, модулированных фиксированной модуляцией, при этом пользователям заранее неизвестно, являются ли они адресатами модулированной информации на таких несущих. 16. Способ по п.15, отличающийся тем, что максимальный период сетки (символов фиксированной модуляции) зафиксирован на основе максимума поворота на наибольшей несущей таким образом, чтобы не вызывать переполнения, при этом NT представляет собой период сетки (символов фиксированной модуляции) в перечете на символы, т.е. максимальное количество символов между двумя последовательными измерениями угла на определенной несущей, при этом фиксированная модуляция может быть распределена среди N несущих в системе таким образом, что все несущие один раз на протяжении NT символов модулированы фиксированной модуляцией, а где суммарное количество несущих, модулированных фиксированной модуляцией на протяжении следования NT символов, равно общему количеству несущих в системе, Ni обозначает количество несущих,модулированных фиксированной модуляцией с символом i, в результате чего через NT символов получают новый результат измерения скорости поворота на каждой из несущих. 17. Способ по пп.15 и 16, отличающийся тем, что для вычисления скорости поворота при приеме пользователь демодулирует информацию, переданную на несущих, модулированных фиксированной модуляцией, заранее зная использованный на них тип модуляции, независимо от того, является ли такой пользователь адресатом информации, переданной головным узлом, и вычисляет углы поворота для переданной совокупности, после чего сравнивает такие углы с результатом предыдущего вычисления на тех же несущих и делит на время между двумя измерениями угла, получая в результате скорость поворота на таких несущих. 18. Способ по пп.15 и 17, отличающийся тем, что для расчета частотной погрешности на стадии слежения измеряют среднюю величину угла поворота совокупности на каждой из несущих за период одного символа и корректируют такую погрешность с использованием частотного корректора (27), (28),при этом такая средняя величина соответствует углу корреляции.
МПК / Метки
МПК: H04B 3/54, H04J 11/00
Метки: использованием, многоточечной, пользователей, данных, канале, нисходящем, множеству, очу-модуляции, системы, способ, передачи, синхронизации
Код ссылки
<a href="https://eas.patents.su/16-5669-sposob-sinhronizacii-peredachi-dannyh-mnozhestvu-polzovatelejj-v-nishodyashhem-kanale-mnogotochechnojj-sistemy-peredachi-dannyh-s-ispolzovaniem-ochu-modulyacii.html" rel="bookmark" title="База патентов Евразийского Союза">Способ синхронизации передачи данных множеству пользователей в нисходящем канале многоточечной системы передачи данных с использованием очу-модуляции</a>
Способ синхронизации связи между множеством пользовательских терминалов и головным узлом в восходящем канале с использованием очу-модуляции
Номер патента: 5608
Опубликовано: 28.04.2005
Авторы: Бласко Кларет Хорхе Висенте, Гавилльеро-Мартин Хуан-Мигель, Ирансо Молинеро Сальвадор, Ривейро Инсуа Хуан Карлос
МПК: H04J 11/00, H04B 3/54, H04L 7/00...
Метки: синхронизации, канале, очу-модуляции, узлом, способ, между, восходящем, множеством, пользовательских, связи, головным, терминалов, использованием
Формула / Реферат:
1. Способ синхронизации связи между множеством пользовательских терминалов и головным узлом в восходящем канале с использованием ОЧУ-модуляции, применимый при двунаправленной связи по электрической сети, в котором предусмотрено средство добавления и извлечения циклического префикса (10) из ОЧУ-символов (7) для предотвращения межсимвольной интерференции (МСИ) и осуществление частотной и временной синхронизации путем передачи синхронизирующих...
Система передачи данных из скважины с использованием модуляции импеданса (варианты), способ и устройство для передачи
Номер патента: 2894
Опубликовано: 31.10.2002
Автор: Хадсон Стивен Мартин
МПК: E21B 47/12, H04B 13/02
Метки: модуляции, данных, устройство, импеданса, использованием, передачи, скважины, способ, система, варианты
Формула / Реферат:
1. Система передачи данных, содержащая средства генерирования сигнала для генерирования и подачи в сигнальную цепь сигнала, представляющего подлежащие передаче данные, причем средства генерирования сигнала содержат средства генерирования опорного сигнала и модулирующие средства для модуляции опорного сигнала с целью кодирования таким образом подлежащих передаче данных, причем модулирующие средства содержат средства модуляции эффективного...
Система автоматической регулировки усиления для многопользовательских систем цифровой передачи данных по электрической сети с использованием очу-модуляции
Номер патента: 5656
Опубликовано: 28.04.2005
Авторы: Матас-Бониллья Алехандро, Ирансо Молинеро Сальвадор, Абад Молина Хосе, Фоурен Нильс Хакан, Хименес Маркина Франсиско Хавьер, Ривейро Инсуа Хуан Карлос, Бласко Кларет Хорхе Висенте
МПК: H04B 3/54, H03G 3/20, H04J 11/00...
Метки: регулировки, очу-модуляции, использованием, данных, усиления, цифровой, электрической, систем, система, многопользовательских, передачи, сети, автоматической
Формула / Реферат:
1. Система автоматической регулировки усиления для многопользовательской системы цифровой передачи данных по электрической сети с использованием ОЧУ-модуляции (ортогональное частотное уплотнение), имеющая множество пользовательских терминалов (2) и головной узел (1), взаимодействующие между собой через систему двунаправленной связи по электрической сети с независимым управлением восходящим каналом, соединяющим пользовательские терминалы (2) с...
Способ множественного доступа и многоточечной передачи данных по электрической сети
Номер патента: 5473
Опубликовано: 24.02.2005
Авторы: Гомес Мартинес Фелисиано, Фоурен Нильс Хакан, Бласко Кларет Хорхе Висенте, Пардо Видал Карлос, Торрес Кантон Луис Мануэль, Руис Лопес Давид, Ривьеро Инсуа Хуан Карлос, Хименес Маркина Франсиско Хавьер
МПК: H04B 3/54
Метки: многоточечной, способ, множественного, электрической, сети, доступа, передачи, данных
Формула / Реферат:
1. Способ множественного доступа и параллельной многоточечной передачи данных по электрической сети, в котором связь между пользовательскими терминалами (A, B, ..., X) и головным узлом (1) осуществляется через электрическую сеть (2) в двустороннем режиме по восходящему каналу, по которому данные передаются от пользовательских терминалов (A, B, ..., X) в головной узел (1), и по нисходящему каналу, по которому данные передаются от головного узла...
Дополнительный канал с высокой скоростью передачи данных для системы связи мдкр
Номер патента: 1746
Опубликовано: 27.08.2001
Авторы: Оденвальдер Джозеф П., Тидманн Эдвард Г., Антонио Франклин П., Дзоу Йу-Чеун
МПК: H04L 5/12, H04J 11/00, H04B 7/26...
Метки: данных, канал, скоростью, системы, высокой, связи, передачи, мдкр, дополнительный
Формула / Реферат:
1. Система передачи для осуществления связи с высокой скоростью передачи совместно с набором сообщений со средней скоростью передачи, использующая обработку радиочастотных сигналов множественного доступа с кодовым разделением, включающая в себя первое средство обработки сигналов для передачи набора сообщений со средней скоростью передачи по первому набору каналов, имеющих среднюю скорость передачи, в полосе радиочастот; и второе средство...
Предыдущий патент: Складывающаяся плёнка из двухосно-ориентированного пропилена для упаковки жировых продуктов
Следующий патент: Конденсатор с электрическим двойным слоем
Случайный патент: Грузоподъемный механизм