Способ сейсмического мониторинга нефтегазовых месторождений с использованием разновременных съемок

Формула / Реферат
1. Способ обнаружения физических изменений в резервуаре, включающий:
подготовку данных, по меньшей мере, двух сейсмических съемок резервуара, первая из которых проведена в первый период времени, а вторая - во второй период времени; и
осуществление процесса сравнения данных первой сейсмической съемки с данными второй сейсмической съемки, предусматривающий:
выделение первой группы отраженных сигналов (например, волновых импульсов) в совокупности сейсмических данных, полученных при первой съемке, и имеющей соответствующую вторую группу отраженных сигналов в совокупности сейсмических данных, полученных при второй съемке, при этом:
первая и вторая группы отраженных сигналов характеризуют неизмененную часть геологической структуры в резервуаре или вблизи него,
первая группа отраженных сигналов представлена первой системой параметров, а вторая группа отраженных сигналов - второй системой параметров;
определение допустимой пороговой разностной функции между первой и второй системами параметров волны;
определение корректирующей функции для второй системы параметров, причем корректирующая функция характеризуется тем, что при приложении ее ко второй системе волновых параметров определяется скорректированная система параметров, при этом разность между данными первой и скорректированной систем волновых параметров будет ниже пороговой разностной функции;
применение корректирующей функции при обработке третьей группы отраженных сигналов, которая связана с сейсмическими данными, полученными при второй съемке, при этом:
формируется скорректированная третья группа отраженных сигналов,
третьей группе отраженных сигналов соответствует четвертая группа отраженных сигналов на совокупности сейсмических данных первой съемки,
третья и четвертая группы отраженных сигналов представляют изменяющуюся часть резервуара;
сравнение скорректированной третьей группы отраженных сигналов с четвертой группой путем вычитания третьей группы из четвертой.
2. Способ по п.1, отличающийся тем, что указанное выше определение допустимой пороговой разностной функции включает:
итеративный подбор измененных параметров группы отраженных сигналов для второй системы параметров,
применение измененных параметров при обработке данных со второй системой параметров, при этом формируется измененная система параметров,
сравнение данных с измененной системой параметров с данными с первой системой параметров,
при этом указанный итеративный подбор продолжается до тех пор, пока не будет достигнуто схождение результатов сравнения, и
допустимая пороговая разностная функция включает измененную систему параметров группы отраженных сигналов, при которой было получено схождение.
3. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает амплитуду.
4. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает фазу.
5. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает частотную полосу.
6. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает время.
7. Способ по п.2, отличающийся тем, что указанные параметры волны включают амплитуду, фазу, частотную полосу и время.
8. Способ по п.1, отличающийся тем, что определение корректирующей функции включает:
итеративный подбор измененных параметров группы отраженных сигналов для второй системы параметров,
применение измененных параметров при обработке данных со второй системой параметров волны, при этом формируется измененная система параметров,
сравнение данных с измененной системой параметров с данными первой системы параметров и определение допустимой пороговой разности,
причем указанный итеративный подбор продолжают до тех пор, пока в результате проведения указанной операции сравнения разность данных с первой системой параметров с данными с измененной системой параметров не станет ниже допустимой пороговой разности.
9. Способ по п.1, отличающийся тем, что указанное определение допустимой пороговой разностной функции включает:
определение разности между записью сигналов во временном окне первой трассы из совокупности сейсмических данных, полученных при первой съемке, и записью сигналов во временном окне второй трассы, полученной при проведении второй сейсмической съемки, при этом:
вторая трасса включает отраженные сигналы, соответствующие отраженным сигналам на первой трассе,
временное окно второй трассы соответствует временному окну первой трассы, и
вычисление отношения разности сигналов в выделенных окнами участках первой и второй трасс к сигналу во временном окне первой трассы, и
выбор значения допустимой пороговой разности меньшим, чем это отношение.
10. Способ по п.9, отличающийся тем, что разница в частотной полосе сигналов во временном окне первой трассы и временном окне второй трассы не превышает 25%.
11. Способ по п.10, отличающийся тем, что разница в частотной полосе сигналов во временном окне второй трассы и временном окне первой трассы менее 10%.
12. Способ по п.1, отличающийся тем, что указанное вычисление допустимой пороговой разностной функции включает:
определение разности между квадратом записи сигналов во временном окне первой трассы из данных первой съемки и квадратом записи сигналов во временном окне второй трассы из данных второй съемки,
причем вторая трасса содержит отраженные сигналы, соответствующие отраженным сигналам на первой трассе, и
временное окно второй трассы соответствует временному окну на первой трассе, и
вычисление отношения разности квадратов записей сигналов в выделенных временными окнами участках записи первой и второй трасс к квадрату записи сигналов во временном окне первой трассы, и
выбор допустимого порогового значения разности меньшим, чем это отношение.
13. Способ по п.7, отличающийся тем, что длительность временного окна равна длительности не менее двух импульсов отраженных сигналов.
14. Способ по п.13, отличающийся тем, что длительность временного окна равна длительности не менее пяти импульсов отраженных сигналов.
15. Способ по п.1, отличающийся тем, что указанное применение корректирующей функции к третьей группе отраженных сигналов во второй совокупности сейсмических трасс включает свертку корректирующей функции с третьей группой отраженных сигналов на второй совокупности трасс.
16. Способ по п.1, отличающийся тем, что указанная первая совокупность данных включает трассу от сейсмоприемника.
17. Способ по п.1, отличающийся тем, что указанная вторая совокупность данных включает просуммированные сейсмические трассы от сейсмоприемников.
18. Способ по п.1, отличающийся тем, что указанные первая и вторая совокупности данных включают просуммированные трассы от расстановки скважинных приемников.
19. Способ по п.1, отличающийся тем, что первая и вторая совокупности данных включают данные после предварительной обработки.
20. Способ по п.19, отличающийся тем, что предварительно обработанные данные включают сейсмограммы OCT.
21. Способ по п.19, отличающийся тем, что указанные предварительно обработанные данные включают сейсмограммы ОПВ.
22. Способ по п.19, отличающийся тем, что указанные предварительно обработанные данные включают мигрированные данные.
23. Способ по п.1, отличающийся тем, что указанные первая и вторая совокупности данных подвергаются эквивалентной предварительной обработке.
24. Способ по п.1, отличающийся тем, что первая совокупность данных подвергается той же процедуре восстановления формы сигнала, что и вторая совокупность.
25. Способ по п.1, отличающийся тем, что первая совокупность данных подвергается той же деконволюционной обработке, что и вторая совокупность трасс.
26. Способ по п.1, отличающийся тем, что первая совокупность данных подвергается обработке с использованием тех же процедур подавления помех, что и вторая совокупность данных.
27. Способ по п.1, отличающийся тем, что и первая, и втоЁря совокупности данных подвергаются одинаковой обработке с целью подавления многократных волн.
28. Способ по п.1, отличающийся тем, что одинаковый DMO оператор используется при обработке первой и второй совокупностей данных.
29. Способ по п.1, отличающийся тем, что миграция первой и второй совокупностей данных производится с эквивалентной скоростной моделью среды.
30. Способ по п.1, отличающийся тем, что миграция первой и второй совокупностей данных производится с использованием одинакового оператора миграции.
31. Способ по п.1, отличающийся тем, что фильтрация первой и второй совокупностей данных производится с использованием одинаковых фильтров.
32. Способ получения разностной записи для данных, по меньшей мере, двух сейсмических съемок, включающий:
подготовку данных, по меньшей мере, двух сейсмических съемок на одной и той же географической площади; и
осуществление процесса деконволюции данных, по меньшей мере, двух сейсмических съемок, предусматривающий:
расчет деконволюционного оператора на основе использования, по меньшей мере, двух совокупностей сейсмических данных, из которых не менее двух совокупностей сейсмических данных были зарегистрированы в разное время;
использование этого оператора деконволюции при обработке, по меньшей мере, двух совокупностей сейсмических данных; и
проведение дальнейшей обработки данных разновременных съемок для получения разностной записи.
33. Способ по п.32, отличающийся тем, что не менее двух совокупностей данных включают не менее трех массивов сейсмических данных, причем каждый из этих массивов представляет записи, полученные при съемках, проведенных в разное время, при этом расчет оператора деконволюции производится на основе использования данных каждого массива.
34. Способ по п.32, отличающийся тем, что не менее двух совокупностей данных включает не менее трех массивов сейсмических данных,
при этом каждый из этих массивов представляет записи, полученные при съемках, проведенных в разное время,
расчет включает определение первого оператора деконволюции на основе первой и второй совокупностей данных, и первый деконволюционный оператор используется для обработки данных первой и второй совокупностей,
дальнейшая обработка включает:
расчет второго оператора деконволюции на основе первой и третьей совокупностей данных, причем второй оператор деконволюции применяется для обработки первой и третьей совокупностей данных.
35. Способ по п.34, отличающийся тем, что первая совокупность данных представляет записи, полученные при съемке, проведенной до съемки, представленной вторым и третьим массивами данных.
36. Способ по п.34, отличающийся тем, что расчет первого оператора деконволюции включает:
осреднение спектра мощности для первой совокупности трасс данных первой съемки,
обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности первой совокупности трасс во временной области,
запоминание этой временной функции,
осреднение спектра мощности для второй совокупности трасс данных второй съемки,
обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности второй совокупности трасс во временной области,
осреднение временных функций, представляющих средние значения спектров мощности первой и второй совокупностей трасс и
расчет оператора деконволюции для обработки данных первой и второй съемок с использованием усредненных значений временных функций, отображающих средний спектр мощности первой и второй совокупностей.
37. Способ по п.32, отличающийся тем, что расчет оператора деконволюции включает:
осреднение спектра мощности для первой совокупности трасс данных первой съемки;
осреднение спектра мощности для второй совокупности трасс данных второй съемки;
осреднение средних значений спектров мощности первой и второй совокупностей трасc и
расчет оператора деконволюции для обработки данных первой и второй съемок на основе осредненных значений спектров мощности первой и второй совокупностей сейсмических трасс.
38. Способ формирования сигнала, характеризующего географическую площадь по результатам при проведении разновременных сейсмических съемок, включающий:
подготовку данных, по меньшей мере, двух сейсмических съемок этой географической площади, первая из которых проведена в первый период времени, а вторая - во второй период времени; и
осуществление процесса обработки этих сейсмических данных, предусматривающий:
выполнение графа обработки входных данных, полученных при первой съемке;
выполнение этого же графа обработки входных данных, полученных при второй съемке;
причем граф обработки определяется системой параметров сейсмических сигналов;
выбор не менее одной системы параметров путем их подбора на основе данных обеих съемок, и
использование не менее одной системы параметров, по меньшей мере, в одном графе при обработке данных, полученных как при первой, так и при второй съемках.
39. Способ по п.38, отличающийся тем, что, по меньшей мере, одна из систем параметров включает оператор деконволюции.
40. Способ по п.39, отличающийся тем, что он дополнительно включает:
расчет оператора деконволюции на основе использования, по меньшей мере, двух совокупностей сейсмических данных, причем не менее двух совокупностей сейсмических данных были зарегистрированы в разное время;
использование этого оператора деконволюции при обработке, по крайне мере, двух совокупностей сейсмических данных; и
проведение дальнейшей обработки данных разновременных съемок для получения разностной записи.
41. Способ по п.40, отличающийся тем, что не менее двух совокупностей данных, включают не менее трех массивов сейсмических данных, причем каждый из них представлен записями, проведенными в разное время, при этом конструкция оператора деконволюции зависит от данных, полученных при каждой съемке.
42. Способ по п.40, отличающийся тем, что не менее двух совокупностей данных включают не менее трех массивов сейсмических данных, при этом:
каждый из этих трех массивов представляет записи, полученные при проведении съемок в разное время,
расчет первого оператора деконволюции основан на использовании первого и второго массива данных, и первый оператор деконволюции применяют при обработке первой и второй совокупностей данных,
дальнейшая обработка включает:
расчет второго оператора деконволюции на основе использования данных, полученных при первой и третьей съемках, второй оператор деконволюции используют при обработке данных первой и третьей съемок.
43. Способ по п.42, отличающийся тем, что первая совокупность данных представлена записями, полученными при съемке, проведенной до съемки, представленной вторым и третьим массивами данных.
44. Способ по п.42, отличающийся тем, что расчет первого оператора деконволюции включает:
осреднение спектра мощности для первой совокупности трасс данных первой съемки;
обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности первой совокупности трасс во временной области;
запоминание этой временной функции;
усреднение спектра мощности для второй совокупности трасс данных второй съемки,
обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности второй совокупности трасс во временной области;
осреднение временных функций, представляющих средние значения спектров мощности первой и второй совокупностей трасс; и
расчет оператора деконволюции для обработки данных первой и второй съемок с использованием усредненного значения временных функций, отображающих средние спектры мощности первой и второй совокупностей.
45. Способ по п.40, отличающийся тем, что расчет оператора деконволюции включает:
осреднение спектра мощности для первой совокупности сейсмических трасс данных первой съемки;
осреднение спектра мощности для втоЁющ совокупности сейсмических трасс данных второй съемки,
осреднение средних значений спектров мощности первой и второй совокупностей сейсмических трасс данных; и
расчет оператора деконволюции для обработки данных первой и второй съемок на основе осредненного значения спектров мощности первой и второй совокупностей сейсмических трасс данных.
Текст
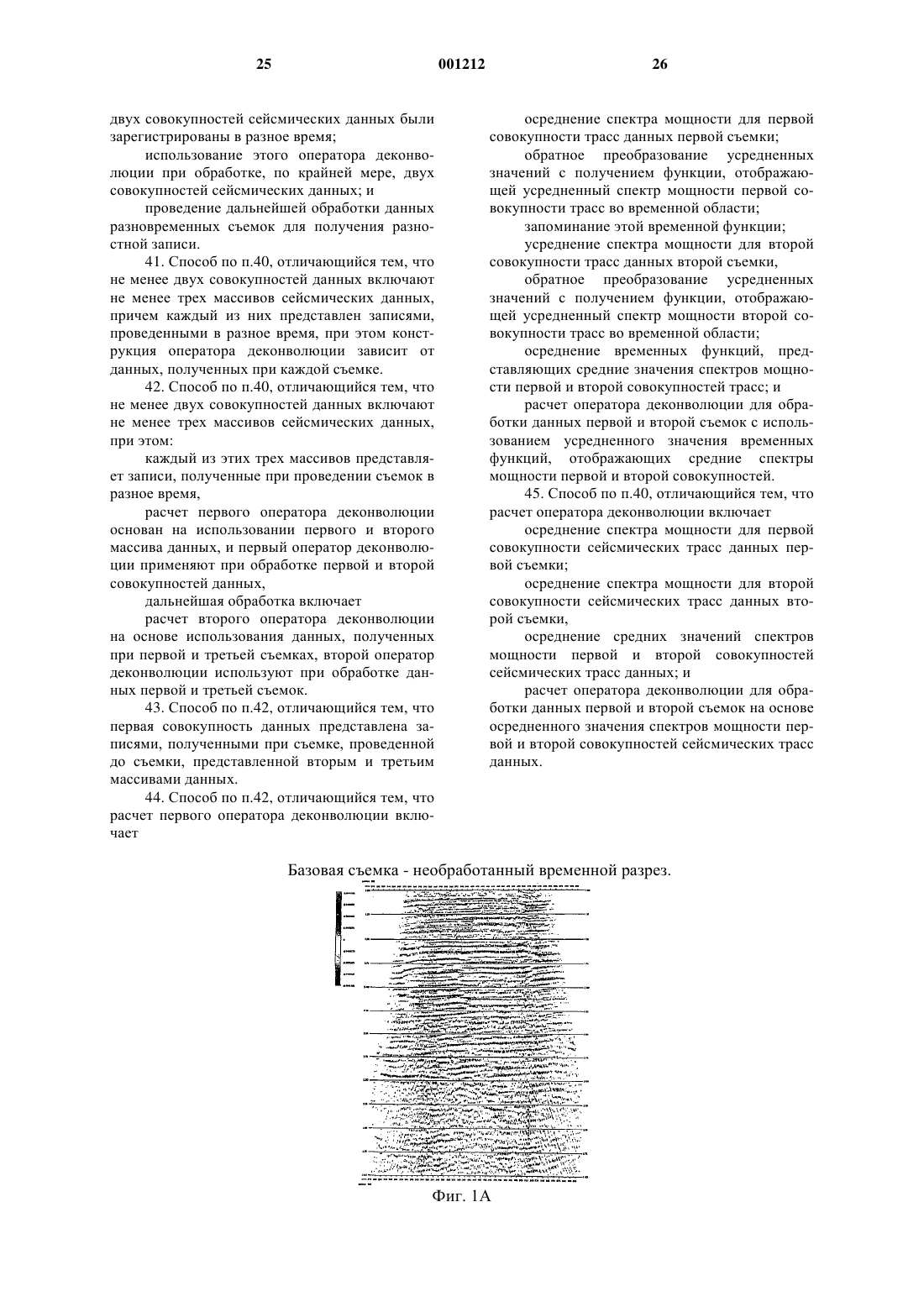
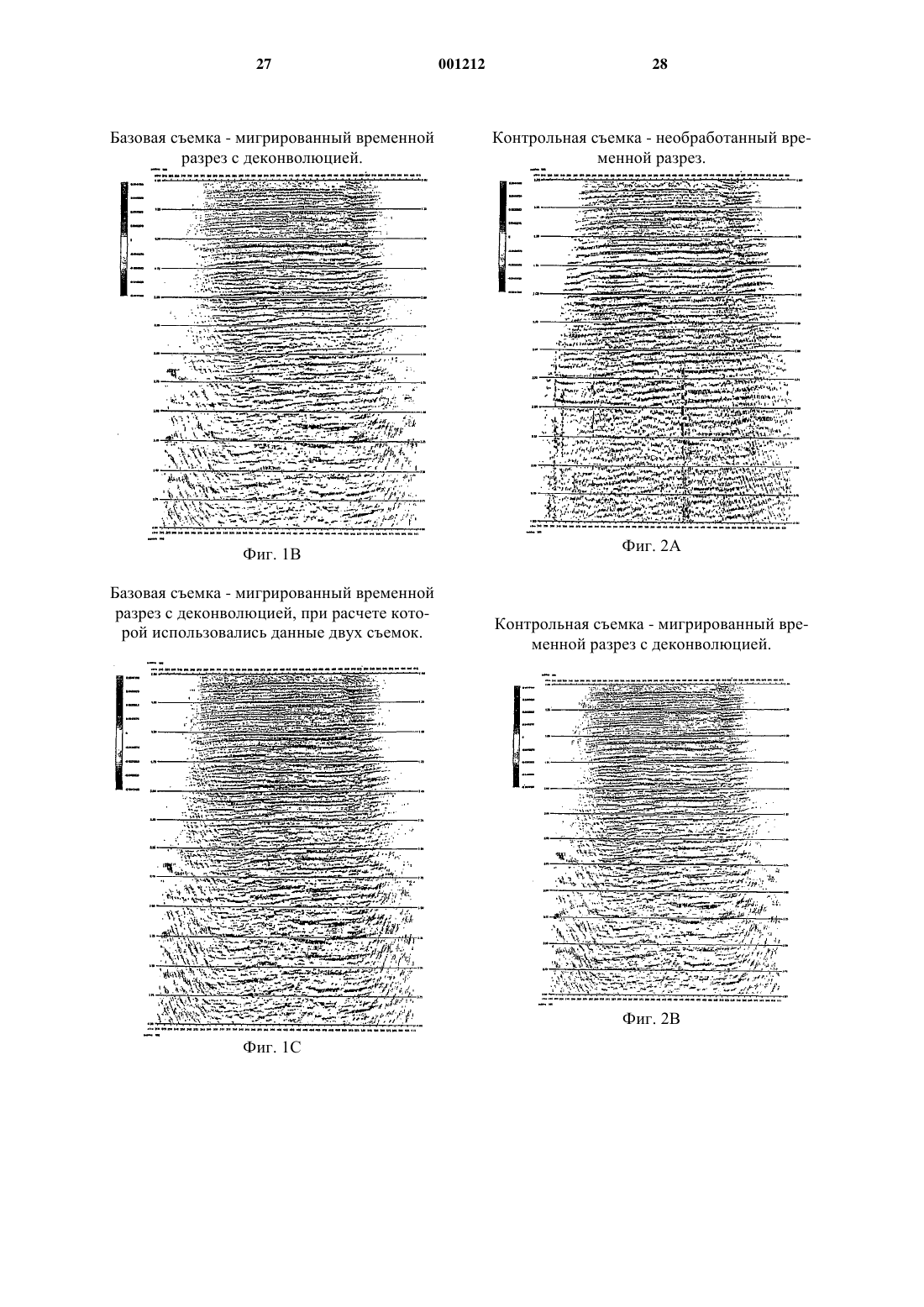
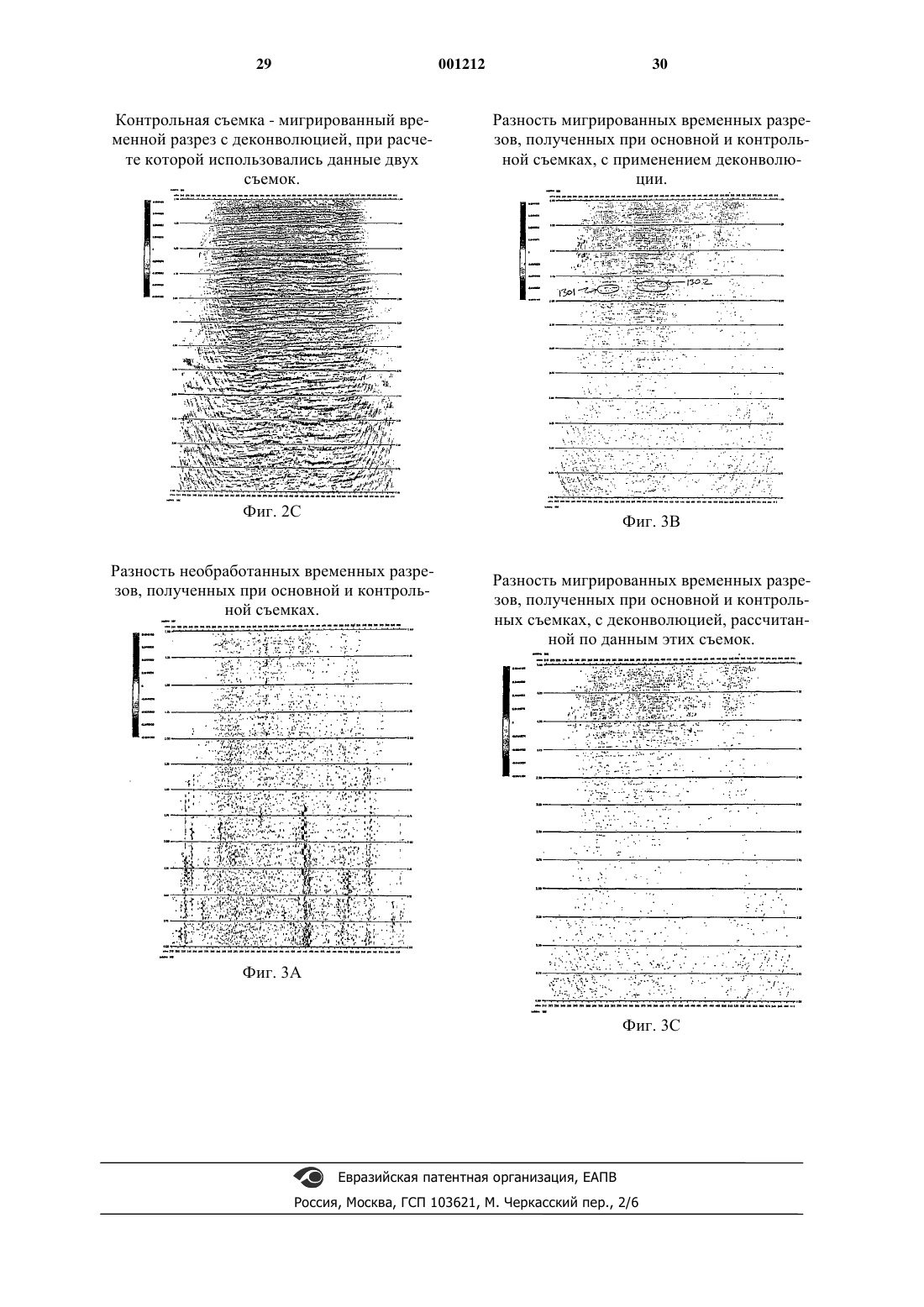
1 Область техники Данное изобретение относится к области эксплуатации нефтяных и газовых месторождений, и, более конкретно, к обнаружению физических изменений на географической площади,в частности в резервуаре, на основании данных,полученных при сейсмическом мониторинге с использованием разновременных съемок. Уровень техники Знание характеристик нефтегазовых месторождений и контроль за изменением их параметров являются важным фактором при эксплуатации месторождений и добыче углеводородов. Эффективная эксплуатация месторождений является главной целью компаний, производящих энергоресурсы, поскольку они стараются уменьшить поисковые расходы, оптимизировать расположение буровых скважин и увеличить финансовую прибыль. Одним из методов,который пытается решить эту проблему, является сейсмический мониторинг с использованием разновременных съемок (также известный как 4D). По мере извлечения нефти или газа, выработки месторождения, или его заполнения при закачке воды или газа в процессе эксплуатации или восстановления месторождения, появляются изменения эффективных упругих свойств пород в резервуаре. Возможность контролировать изменения в резервуаре как функции времени при помощи сейсмических методов позволит улучшить расположение эксплуатационных и нагнетательных скважин, даст возможность локализовать невыработанные зоны и более эффективно обслуживать месторождение, увеличивая, таким образом, общую стоимость продуктивного участка. В двумерном варианте возможности сейсмомониторинга исследовались при проведении межскважинного просвечивания. Однако было проведено только качественное сравнение повторных результатов, на основании которого был сделан вывод, что данные двумерных разновременных съемок пока не содержат той информации, которая необходима при современных методах разработки месторождений (смотри, например, работу Paulsson et al., 1994, "TheLeading Edge", включенную в описание изобретения посредством ссылки на нее). 3D технологии также опробовались, при разновременных съемках, но они содержат сложные моделирующие процедуры и требуют больших объемов обработки, не используя при этом реальные данные, получаемые в процессе проведения съемок (смотри, например, патент США 4969130, включенный в описание изобретения путем ссылки на него). Два конкретных примера применения разновременного сейсмического мониторинга,включенные в описание изобретения путем ссылки на них, опубликованы в работе GreavesFulp (Geophysics, 1987), авторы которой контролировали выгорание пластов в Западном Техасе, 001212 2 и в работе Uden and Dunlop (First Break, 1993),описывающей контроль газового заполнения вOseberg Field, расположенном в норвежском секторе Северного моря. Еще одна статья,включающая материалы по паровому заполнению в Dur: Field в Индонезии, была представлена Lumley et al. на конференции Society of Exploration Geophysics (SEG) в Хьюстоне 1995 г.(она может быть получена через SEG). Одна из проблем при обработке данных сейсмического мониторинга с использованием разновременных съемок заключается в том, что изменяется не только состояние месторождения(резервуара), но и многие условия при проведении разновременных съемок, например, расположение источника и приемника при повторных работах, несомненно, будет отличаться от первоначальных. Кроме того, прилив при повторной морской съемке может быть выше или ниже, так же как и температура воздуха и воды. Аналогично, конкретные характеристики источников и приемников, используемых при повторных работах, также будут отличаться. Другие различия, кроме изменений в состоянии резервуара, также встречаются, например, разница в способах обработки данных, полученных при разновременных съемках. Таким образом, существует необходимость в разработке такого способа обработки данных разновременных съемок,чтобы различия в способах обработки не оказывали вредного влияния на результаты сравнения. Например, при получении сейсмических данных используется источник для возбуждения сейсмических волн, которые отражаются от геологических границ в земле (например, границ пластов) и принимаются приемниками. В некоторых случаях сигнал источника считается кратковременным импульсом, хотя в действительности форма сигнала может существенно отличаться от идеальной. В процессе распространения через горные породы и отражения от сейсмических границ форма сигнала изменяется, и поэтому отраженный сигнал, регистрируемый приемниками, больше не является кратковременным импульсом или даже похожим на него. Деконволюция является процедурой, при помощи которой форма отраженного сигнала"отбеливается" с целью восстановления формы кратковременного импульса в сейсмических данных. В другом примере используется широкополосный, ограниченный частотной полосой сигнал, который является нуль-фазовым. Деконволюция в этом случае используется для удаления искажений, связанных с распространением сигнала в земле. Еще в одном примере, при выполнении деконволюции в частотной области, все частотные составляющие умножаются на определенные коэффициенты для приведения их к одинаковому уровню, следуя предположению, что сигнал, 3 возбуждаемый в источнике, является минимально-фазовым, т.е. мгновенно нарастает до максимального значения и затем также быстро спадает до нуля. Для выполнения такой деконволюции во временной области производится вычисление функции автокорреляции сейсмической трассы, которая имеет форму симметричного волнового импульса. Энергетический спектр этого импульса анализируется для определения коэффициентов, на которые необходимо умножить каждую частотную составляющую импульса для выравнивания его частотного спектра. Эта операция выполняется в определенных окнах как вдоль сейсмической трассы(временные окна), так и "поперек" (интервал профиля) сейсмограммы (здесь термин сейсмограмма используется для альтернативных совокупностей записей, например, для сборок записей с общим пунктом приема (сейсмограммы ОПП), общей средней точкой (сейсмограммы ОСТ), общим пунктом возбуждения (сейсмограммы ОПВ), временных разрезов, полученных после суммирования трасс и т.д.). Автокорреляционная функция вычисляется в различных окнах, затем определяется среднее значение полученных результатов с целью последующего вычисления спектра. На основе этого спектра определяется оператор, необходимый для его сглаживания и формирования горизонтальной характеристики. Этот оператор затем используется при обработке всех входных трасс. Обычно временное окно выбирается равным 10 длинам создаваемого оператора и измеряется числом выборок. Операция деконволюции и расчет оператора деконволюции хорошо известны в сейсморазведке и не ограничиваются рассмотренным выше примером выполнения ее в частотной области. Она также часто реализуется и во временной области. Смотри, например, Yilmaz "Investigations in Geophysics" Vol. 2, Seismic Data(1987) и приведенные в этом источнике ссылки. При выполнении деконволюции очень важно рассчитать оператор деконволюции с использованием данных конкретной съемки для учета особенностей формы возбуждаемого источником сигнала и других аппаратурных искажений сейсмических импульсов. Поэтому полученные при каждой съемке данные исправляются путем применения специального, оптимального именно для этой съемки, оператора деконволюции, который может не подходить для обработки данных других съемок. В результате использования различных операторов деконволюции при обработке данных разновременных съемок на разностной записи при вычитании сейсмограмм, полученных при этих съемках,будут появляться какие-то структуры. Этот результат является нежелательным. Однако до сих пор никто не предложил практического решения этой задачи. 4 Сущность изобретения Задачей, решаемой настоящим изобретением, является преодоление рассмотренной выше проблемы. Было установлено, что вопреки прежним убеждениям можно использовать один оператор деконволюции для обработки множества сейсмических данных, не только не ухудшая результаты, но и повышая качество обработки, проводимой для сравнения данных разновременных съемок. В соответствии с одним аспектом настоящего изобретения, предлагается способ получения разностной записи для данных, по меньшей мере, двух сейсмических съемок,включающий подготовку данных, по меньшей мере, двух сейсмических съемок на одной и той же географической площади и осуществление процесса деконволюции полученного множества сейсмических данных. Процесс деконволюции согласно изобретению включает: расчет оператора деконволюции на основе использования, по меньшей мере, двух совокупностей сейсмических данных, причем не менее двух совокупностей сейсмических данных, которые были зарегистрированы в разное время; использование этого оператора деконволюции при обработке, по меньшей мере, двух совокупностей сейсмических данных; и проведение дальнейшей обработки данных разновременных съемок для получения разностной записи. Согласно еще одному из аспектов изобретения предлагается способ обнаружения физических изменений в месторождении (резервуаре), включающий подготовку данных, по меньшей мере, двух сейсмических съемок резервуара, первая из которых проведена в первый период времени, а вторая - во второй период времени, и осуществление процесса сравнения данных первой и второй съемок. При этом проведение сравнения данных разновременных съемок предусматривает: выделение первой группы отраженных сигналов (например, волновых импульсов) в совокупности сейсмических данных,полученных при первой съемке, и имеющей соответствующую вторую группу отраженных сигналов в совокупности сейсмических данных,полученных при второй съемке, причем первая и вторая группы отраженных сигналов характеризуют неизмененную часть геологической структуры или находящихся вблизи резервуара пластов, при этом первая группа отраженных сигналов представлена первой системой параметров, а вторая группа отраженных сигналов второй системой параметров. Затем определяется значение допустимой пороговой разностной функции для сейсмических данных с первой и второй системами параметров с последующим определением корректирующей функции для обработки данных со второй системой параметров. Далее предусматривается, что корректирующую функцию вычисляют таким образом, 5 что после ее применения к данным со второй системой волновых параметров определяется скорректированная система параметров, и разность между данными с первой и скорректированной системами волновых параметров будет ниже пороговой разностной функции. Затем корректирующую функцию применяют при обработке третьей группы отраженных сигналов,которая выделяется на сейсмических данных,полученных при второй съемке, при этом формируют скорректированную третью группу отраженных сигналов, которой соответствует четвертая группа отраженных сигналов на совокупности сейсмических данных первой съемки,причем третья и четвертая группы отраженных сигналов представляют изменяющуюся часть резервуара. Сравнение скорректированной третьей группы отраженных сигналов с четвертой группой отраженных сигналов производится путем вычитания скорректированной третьей группы отраженных сигналов из четвертой, которое и дает желаемую информацию. Согласно более конкретному варианту,приводимому в качестве примера, указанное выше определение допустимой пороговой разностной функции включает: итеративный подбор измененных параметров группы отраженных сигналов для второй системы параметров, применение измененных параметров при обработке данных со второй системой параметров, при этом формируется новая запись с измененной системой параметров, сравнение данных с измененной системой параметров с данными с первой системой параметров, причем указанный итеративный подбор продолжают до тех пор, пока не будет достигнуто схождение результатов сравнения. При этом допустимая пороговая разностная функция включает измененную систему параметров группы отраженных сигналов, при которой было получено схождение. Примерная система параметров включает любую комбинацию амплитуды, фазы, частотной полосы, времени вступления или в отдельности любые из вышеприведенных параметров. Согласно другому варианту осуществления изобретения, приводимому в качестве примера, определение корректирующей функции включает: итеративный подбор измененных параметров группы отраженных сигналов для второй системы параметров, применение измененных параметров при обработке данных со второй системой параметров волны, при этом формируется измененная система параметров,сравнение данных с измененной системой параметров с данными с первой системой параметров и определение допустимой пороговой разности, причем указанный итеративный подбор продолжают до тех пор, пока в результате проведения указанной операции сравнения, являющейся разностью данных с первой системой 6 параметров с данными с измененной системой параметров, она не станет ниже допустимой пороговой разности. Согласно еще одному варианту, приведенному в качестве примера, указанное определение допустимой пороговой разностной функции включает: определение разности между записью сигналов во временном окне первой трассы из совокупности сейсмических данных, полученных при первой съемке, и записью сигналов во временном окне второй трассы, полученной при проведении второй сейсмической съемки, причем вторая трасса включает отраженные сигналы, соответствующие отраженным сигналам на первой трассе, а временное окно второй трассы соответствует временному окну первой трассы; вычисление отношения разности сигналов в выделенных окнами участках первой и второй трасс к сигналу во временном окне первой трассы; выбор допустимого значения пороговой разности, которое было бы меньше этого отношения. Сигналы во временных окнах, соответствующих как постоянным, так и изменяющимся частям резервуара, имеют похожие спектральные характеристики. Например, если сейсмические сигналы, приходящие от пластов в изменяющейся части резервуара, имеют преобладающую частоту, равную 30 Гц, то временное окно должно быть выбрано там, где преобладающая частота сейсмических сигналов от неизмененной части объекта исследований ближе всего к 30 Гц. Аналогично, фазовые изменения сейсмических сигналов, приходящих из резервуара и неизмененной части месторождения,должны быть возможно более близкими. Предпочтительнее, однако, ошибаться в более высокочастотную сторону. Например,если преобладающая частота сигналов из резервуара равна 30 Гц, то окно, содержащее сигналы с частотой 35 Гц, считается более подходящим,чем окно с сигналами, имеющими преобладающую частоту в 25 Гц. Установлено, что при расхождении преобладающих частот не более чем на 25%, результаты получаются адекватными. Наилучшие результаты будут получены, когда расхождение в частотных полосах отраженных сигналов не превышает 10%. В еще одном варианте указанное определение допустимой пороговой разностной функции включает: определение разности между квадратом записи сигналов во временном окне первой трассы из данных первой съемки и квадратом записи сигналов во временном окне второй трассы из данных второй съемки, причем вторая трасса содержит отраженные сигналы,соответствующие отраженным сигналам на первой трассе, и временное окно второй трассы соответствует временному окну на первой трассе; вычисление отношения разности квадратов записей сигналов в выделенных временными окнами участках записи первой и второй трасс к 7 квадрату записи сигналов во временном окне первой трассы; и выбор допустимого порогового значения разности меньшим, чем это отношение. Согласно другому варианту указанное применение корректирующей функции к третьей группе отраженных сигналов во второй совокупности сейсмических трасс включает свертку корректирующей функции с третьей группой отраженных сигналов во второй совокупности трасс; в этих вариантах указанная первая совокупность сейсмических данных включает трассу от сейсмоприемника. В альтернативном варианте указанная первая и вторая совокупности сейсмических данных включают просуммированные сейсмические трассы от сейсмоприемников, т.е. суммограммы трасс (временные разрезы) или сейсмограммы ОСТ (общая средняя точка) и ОПВ (общий пункт возбуждения). В других альтернативных вариантах указанная первая и вторая совокупности сейсмических данных включают сейсмограммы после предварительной обработки, предшествующей построению временных разрезов, или мигрированные данные. Во многих вариантах указанная первая и вторая совокупности сейсмических данных подвергаются эквивалентной предварительной обработке, например, кроме описанной выше деконволюции, в некоторых вариантах первая и вторая совокупности данных имеют одинаковую процедуру восстановления формы сигнала,одинаковый граф обработки для подавления помех и многократных волн. Кроме того, во многих вариантах используют одинаковыеDMO операторы, а миграцию в первой и второй совокупностях сейсмических данных проводят с использованием эквивалентной скоростной модели среды. И, наконец, согласно еще одному аспекту изобретения предлагается способ формирования сигнала, характеризующего географическую площадь по результатам проведения разновременных сейсмических съемок. Данный способ включает подготовку данных по меньшей мере двух сейсмических съемок этой географической площади, первая из которых проведена в первый период времени, а вторая - во второй период времени, и обработку этих сейсмических данных. Указанная обработка включает: выполнение определенного графа обработки входных данных, полученных при первой съемке, выполнение этого же графа обработки входных данных, полученных при второй съемке, причем граф обработки зависит от системы параметров сейсмических сигналов; выбор не менее одной системы параметров путем их итеративного подбора на основе данных обеих съемок, и использование не менее одной системы параметров по меньшей мере в одном графе при обработке данных, полученных как при первой, так и при второй съемках. 8 Краткий перечень фигур чертежей Для более полного понимания сущности настоящего изобретения и связанных с его применением преимуществ в следующем разделе описания будут сделаны ссылки на прилагаемые графические материалы, на которых: Фиг. 1 А является изображением первой записи сейсмической съемки, проведенной в первой раз без применения деконволюции. Фиг. 1 В является изображением первой записи, показанной на фиг. 1 А, с проведенной деконволюцией, причем оператор деконволюции был рассчитан на основе использования данных первой записи. Фиг. 1 С является изображением первой записи, показанной на фиг. 1 А, с выполненной деконволюцией, причем оператор деконволюции рассчитывался на основе данных первой записи и данных другой съемки. Фиг. 2 А является изображением второй записи второй съемки, проведенной на той же самой географической площади, что и первая съемка, но в другое время; деконволюция при получении этой записи не применялась. Фиг. 2 В является изображением второй записи, приведенной на фиг. 2 А, с выполнением деконволюции, причем оператор деконволюции был рассчитан на основе данных второй записи. Фиг. 2 С является изображением второй записи, показанной на фиг. 2 А, с применением деконволюции, причем оператор деконволюции был рассчитан на основе использования данных первой и второй записей, приведенных на фиг. 1 А и фиг. 2 А. Фиг. 3 А является изображением разности записей, приведенных на фиг. 1 А и 2 С. Фиг. 3 В является изображением разности записей, приведенных на фиг. 1 В и 2 В. Фиг. 3 С является изображением разности записей, приведенных на фиг. 1 С и 2 С. Следует, однако, отметить, что приложенные материалы иллюстрируют только наиболее типичные варианты осуществления данного изобретения и поэтому не могут считаться ограничивающими его объем, так как изобретение допускает другие, в равной степени эффективные варианты его осуществления. Сведения, подтверждающие возможность осуществления изобретения Применяемый здесь термин "корректирующая обработка" является универсальным термином,объединяющим согласующую фильтрацию, выравнивание амплитуд и введение статических поправок, необходимых для проведения разновременных региональных сейсмических наблюдений (сейсмического мониторинга). По существу, определяют оператор или операторы волнового импульса для формирования и согласования отраженных сигналов,полученных при разных съемках. Обычно операторы рассчитывают для сигналов от не под 9 вергшихся изменению отражающих горизонтов,находящихся вне резервуара, в коллекторах которого могут происходить значительные изменения (в порах) состояния флюидов (т.е. текучих сред, жидкости или газа). Теоретически,разность между двумя массивами данных после корректирующей обработки должна равняться нулю везде (внутри и вне выбранного окна), за исключением тех участков в резервуаре, где происходят изменения. Все отраженные сигналы от неизмененных (статических) или находящихся вне резервуара границ должны быть полностью вычтены, останутся только изменения,соответствующие динамическим участкам резервуара (т.е. местам, где происходит замещение флюидов внутри пор). Возможность обнаружения изменений в состоянии резервуара сейсмическим методом определяется его литологией и акустическими свойствами поровых флюидов (которые зависят от температуры и давления), типа эксплуатационного или восстановительного процесса, разрешающей способности (пространственной и временной) сейсмических данных, не считая требований к повторяемости сейсмической технологии. В некоторых резервуарах с газовым нагнетанием введение газа может уменьшить акустический импеданс (нефть замещается газом) в достаточной степени для появления яркого пятна (смотри также статью Fulp и Greaves, GEOPHYSICS, 1987, включенную в описание изобретения посредством ссылки на нее, где рассматривается возникновение яркого пятна при выгорании в пластах). В других случаях заполнение газом или водой (нагнетание воды) может привести к противоположной реакции и образовать тусклое пятно. Там, где производится заполнение паром, может наблюдаться снижение скорости упругих колебаний, которое часто используется для локализации фронта пара в породах резервуара, с целью определения, до какой степени продвинулось восстановлениеExpanded Abstracts, 1995, включенную в описание изобретения посредством ссылки на нее). Из вышеизложенного следует, что необходима петрофизическая и сейсмическая интерпретация для того, чтобы понять, какие характерные свойства являются существенными и какие изменения в породах резервуара можно обнаружить. Обработка В рассматриваемых далее примерах применялся стандартный граф обработки, выполняемый с целью получения пространственно скорректированных записей полезных сигналов,с сохранением относительных амплитуд входных данных, который включает NMO/DMO процедуру и предварительную (с нулевым сдвигом) миграцию. Другие процедуры предварительной обработки опытными специалистами 10 могут использоваться и другие процедуры предварительной обработки, включая уплотнение данных, а также способы выборки данных для уменьшения трудоемкости вычислительных операций и сохранения качества предварительной обработки. После такой обработки будут получены ОСТ сейсмограммы с сохранением относительных амплитуд и предварительной миграцией, для которых выполняют корректирующую обработку и разностные измерения данных, полученных при разновременных съемках. В зависимости от характеристик эксплуатируемого резервуара, согласно альтернативному варианту осуществления изобретения, ОСТ,AVO свойства, а также временные разрезы с миграцией или без нее, полученные при обработке данных каждой съемки, подвергают корректирующей обработке и затем вычитают (определяют разность) для обнаружения внутрипорового замещения флюидов. Рекомендуется, чтобы данные каждой разновременной съемки обрабатывались возможно более близкими способами (что обычно не выполняется на практике). До настоящего изобретения использовались любые обработанные данные, находящиеся в обрабатывающих центрах (с отличающимися процедурами и алгоритмами предварительной обработки), а удаление имеющихся в результате этого различий в сейсмических данных пытались устранить путем корректирующей обработки. Лучшая корректирующая обработка и более существенные значения разности сейсмических данных будут получены при повторной обработке имеющихся сейсмических данных с той же самой методологией и программным обеспечением, что и последняя съемка в сейсмическом мониторинге. Таким образом, предпочтительнее выполнять операции восстановления формы сигнала, деконволюции, подавления помех и кратных волн с одинаковыми параметрами обработки для каждой съемки, точно также важно использовать одинаковые DMO операторы и выполнять миграцию данных с применением эквивалентной скоростной модели для получения результатов,пригодных для проведения дальнейших измерений. В связи с этим, согласно одному аспекту изобретения, предлагается способ формирования сигнала, характеризующего географическую площадь по результатам проведения разновременных сейсмических съемок. Способ включает подготовку данных, по меньшей мере,двух сейсмических съемок этой географической площади, первая из которых проведена в первый период времени, а вторая - во второй период времени, и обработку этих сейсмических данных, в процессе которой выполняют граф обработки входных данных, полученных при первой съемке, граф обработки входных данных, полученных при второй съемке, причем граф обработки определяется заданной систе 11 мой параметров сейсмического сигнала. Данный способ включает: (а) выбор не менее одной системы параметров путем их итеративного подбора на основе данных обеих съемок и (б) использование не менее одной системы параметров, по меньшей мере, в одном графе при обработке данных, полученных как при первой, так и при второй съемках. Например, было обнаружено, что улучшенная деконволюционная обработка данных обеих съемок достигается при расчете деконволюции оператора на основе использования множества совокупностей данных. Этот оператор деконволюции применяется затем при обработке данных обеих съемок. Такой оператор может не являться оптимальным для обработки данных любой отдельной съемки, тем не менее,он будет оптимальным при сравнении результатов разновременных съемок. Предлагается также способ получения разностной записи для данных, по меньшей мере,двух сейсмических съемок, включающий подготовку данных, по меньшей мере, двух сейсмических съемок на одной и той же географической площади и осуществление процесса деконволюции полученных данных. При этом процесс деконволюции предусматривает расчет оператора деконволюции на основе использования, по меньшей мере, двух совокупностей сейсмических данных, причем не менее двух совокупностей сейсмических данных были зарегистрированы в разное время; использование этого оператора деконволюции при обработке, по меньшей мере, двух совокупностей сейсмических данных; и проведение дальнейшей обработки данных разновременных съемок для получения разностной записи. В некоторых случаях имеются не менее трех совокупностей сейсмических данных, причем каждая из них представлена записями, проведенными в разное время, при этом конструкция оператора деконволюции зависит от данных, полученных при каждой съемке. В некоторых из этих случаев выполняются дополнительные процедуры обработки, включающие расчет второго оператора деконволюции на основе использования данных, полученных при первой и третьей съемках, причем второй оператор деконволюции используется при обработке данных первой и третьей съемок. С одинаковой эффективностью в качестве первой совокупности данных может быть принята совокупность, взятая до или после второй совокупности. Согласно более конкретному варианту,приводимому в качестве примера, расчет первого оператора деконволюции включает: осреднение спектра мощности для первой совокупности трасс данных первой съемки; осреднение спектра мощности для второй совокупности трасс данных второй съемки; осреднение средних значений спектров мощности первой и второй совокупностей трасс; и расчет оператора декон 001212 12 волюции для обработки данных первой и второй съемок на основе осредненных значений спектров мощности первой и второй совокупностей сейсмических трасс. В некоторых обстоятельствах рассмотренное выше осреднение спектров мощности для каждой последующей съемки может оказаться чересчур дорогим. Поэтому в соответствии с другим вариантом осуществления изобретения,при обработке данных многократных съемок запоминаются осредненные значения данных первой съемки, так что когда производится более поздняя съемка, автокорреляционные функции данных первой съемки не должны вычисляться заново. Согласно этому варианту расчет первого оператора деконволюции включает: осреднение спектра мощности для первой совокупности трасс данных первой съемки; обратное преобразование усредненного значения с получением функции, отображающей усредненный спектр мощности первой совокупности трасс во временной области; запоминание этой временной функции; усреднение спектра мощности второй совокупности трасс данных второй съемки; обратное преобразование усредненного значения с получением функции, отображающей усредненный спектр мощности второй совокупности трасс во временной области; осреднение временных функций, представляющих средние значения спектров мощности первой и второй совокупностей трасс; и расчет оператора деконволюции для обработки данных первой и второй съемок с использованием усредненного значения временных функций, отображающих средние значения спектров мощности первой и второй совокупностей. Рассмотрим теперь фиг. 1 А, иллюстрирующую конкретный пример совокупности сейсмических трасс, который будет далее обсуждаться. На фиг. 1 А изображен первый предварительный временной разрез (без DMO, миграции и различных способов подавления помех,только учет сферического расхождения и геометрическая коррекция), построенный по данным первой съемки без выполнения процедуры деконволюции. На фиг. 1 В изображен временной разрез, приведенный на фиг. 1 А, после проведения деконволюции, причем оператор деконволюции был рассчитан на основе данных предварительного временного разреза и использован при обработке сейсмических данных до суммирования трасс. Были использованы следующие параметры: Дискретность 2 мс Длина оператора 140 мс Интервал предсказания единичный импульс 2 мс Окно анализа зависит от расстояния источник-приемник, для ближних расстояний 3005000 мс, для дальних 3600-5000 мс Добавленный белый шум 0,5% 13 Окно для проведения деконволюции 0-600 мс. На фиг. 2 А изображен второй предварительный временной разрез, построенный по данным второй съемки, проведенной на той же географической площади, что и первая съемка,но в другое время; при построении разреза не выполнялась операция деконволюции; на фиг. 2 В показан временной разрез, изображенный на фиг. 2 А, после проведения деконволюции, причем оператор деконволюции рассчитывался на основе данных второго предварительного временного разреза и использовался до суммирования трасс. Здесь была использована та же система параметров, которая применялась для обработки данных первой съемки. Фиг. 3 А является разностью временных разрезов, приведенных на фиг. 1 А и 2 А. Фиг. 3 В представляет разность временных разрезов,изображенных на фиг. 1 В и 2 В. В идеальном случае на разностном разрезе, изображенном на фиг. ЗА, не должно быть ничего, кроме шумовых помех в области, соответствующей неизмененной части геологического разреза, если в остальном обе съемки были идентичны. Однако можно видеть, что неизмененные структуры проявляются на разностном разрезе, изображенном на фиг. 3 В. На фиг. 1 С приведен первый временной разрез, показанный на фиг. 1 А, после проведения деконволюции до построения временного разреза, причем оператор деконволюции был рассчитан на основе использования данных первой и второй совокупностей трасс. На фиг. 2 С приведен второй временной разрез, изображенный на фиг. 2 А, после деконволюции, проведенной до построения временного разреза, причем оператор деконволюции рассчитывался на основе данных первой и второй совокупностей трасс. Применявшаяся система параметров для обработки данных на фиг. 1 С и 2 С была такой же, как и для данных на фиг. 1 А. На фиг. 3 С изображена разность временных разрезов, приведенных на фиг. 1 С и 2 С. Отметим отсутствие неизмененных структур. Для расчета деконволюционного фильтра используется несколько вариантов; в одном из них обрабатывается первый(т.е. базовый) массив входных данных, причем осредненные значения функций автокорреляции сейсмических трасс внутри каждой совокупности трасс (т.е. сейсмограммы ОПВ, ОПП, ОСТ и т.д.) используют путем преобразования в частотной области для оценки спектра мощности. где N - число сейсмических трасс по оси X,Q - индекс частоты Найквиста, 001212P(i,k) - оценка спектра мощности для индекса частоты i и номера трассы k, иj - индекс разновременной съемки. Затем производят обратное преобразование Фурье, и автокорреляционные функции трасс для каждой совокупности сохраняются. Такая же оценка спектра мощности производится для массива данных, полученных в другое время (т.н. "контрольный" массив), посредством вычисления j=1 P(i, k) где j=1 является индексом первой контрольной съемки. После этого все полученные для разновременных съемок усредненные автокорреляционные функции осредняются для вычисления новой автокорреляционной функции с использованием следующей формулы:j=1,M, где М - номер разновременной съемки. Полученные автокорреляционные функции используются для расчета частотных фильтров,которые применяются при обработке данных всех разновременных съемок. Другие способы расчета деконволюционных фильтров (например, переменная во времени деконволюция, деконволюция, учитывающая поверхностные условия, деконволюция в общей области (ОПВ, ОПП, ОСТ, или равные удаления источник-приемник, которые могут применяться опытными специалистами, также основаны на использовании данных обеих съемок, и не выходят за рамки настоящего изобретения. Далее, аналогично рассмотренной выше операции деконволюции, параметры других процедур обработки для реализации преимуществ настоящего изобретения также должны рассчитываться на основе данных, полученных при всех съемках, а не какой-либо одной. Например, корректирующая обработка (более детально будет обсуждаться ниже), f-k частотная фильтрация, и фильтрация в Радон-области, вычисление статических поправок, удаление кратных волн в FK, в - и в Радон-областях. На практике имеются различия в условиях регистрации сейсмических данных, независимо от того, насколько хорошо эти работы были спланированы или выполнены. В идеальном случае, когда регистрация данных при выполнении базовой и контрольной съемок проводится в одинаковых условиях, обработка также должна быть идентичной. В реальных условиях это не выполняется. Изменения в условиях регистрации данных при проведении разных съемок могут появиться в результате использовании различных регистрирующих систем, которые применяются при реализации настоящего изобретения (например, постоянно установленные системы, OBS системы и морские сейсмические косы). Такие изменения могут быть вызваны отклонением косы от линии профиля, смещени 15 ем кабеля, азимутом воздействий, изменениями в источниках, состоянием моря в момент проведения наблюдений и т.д., в результате которых могут появиться различия в условиях проведения съемок. Корректирующая обработка Согласно одному из возможных вариантов осуществления изобретения имеются четыре"корректирующих" элемента в используемой корректирующей функции. Это введение временных поправок, выравнивание среднеквадратичного значения энергии, нормализация частотной полосы и фазовое согласование. Каждый элемент является существенным при построении переходной функции или функции импульсной реакции при обработке данных двух съемок или, альтернативно, двух трасс каждой съемки. Результирующая трасса после корректирующей обработки (tXEQ) вычисляется следующим образом:scorr, rmscorr, mcorr и рсоrr являются элементами корректирующей обработки (в функции импульсной реакции f), соответствующими времени, амплитуде, частотной полосе и фазе. В соответствии с альтернативным вариантом осуществления изобретения функции импульсной реакции вычисляют последовательно,с учетом поверхностных условий и с использованием данных основной съемки (база) и данных контрольной съемки (повторение). Согласно настоящему варианту, приведенному в качестве примера, данные контрольной съемки преобразуются (в результате корректирующей обработки) таким образом, чтобы соответствовать данным базовой съемки, и функции импульсной реакции рассчитывают для горизонтальных временных окон, расположенных в интервале записи вне зоны резервуара, в которой ожидаются изменения. Далее влияние каждой составляющей будет пояснено на простых моделях и на примере разновременных исследований при выполнении трехмерного проекта. Элементы корректирующей обработки. Временные поправки (scorr). Кроме бурного моря в шторм и течения,которые могут быть причиной отклонения косы от линии профиля, также играют роль приливно-отливные условия и температурные изменения. Эти изменения могут быть несущественными при регистрации, обработке или интерпретации сейсмических данных для одиночной 3D съемки. Однако, когда несколько 3D съемок используют для сейсмического мониторинга,существуют потенциальные предпосылки для непостоянства состояния моря при разных съемках. Сезонные и кратковременные (связанные со штормом) изменения температуры и солености воды также могут служить причиной разли 001212 16 чия во временах прихода отражений, зарегистрированных при разных съемках. Степень изменения является функцией, зависящей от изменений температуры и солености воды на линии профиля, и глубины этих изменений в толще воды. Например, съемки, проведенные в Восточно-Китайском море, показывают, что в течение 10-летнего периода наблюдений сезонные изменения являлись ощутимыми, и они могли изменять (до 2 мс) время пробега отраженной волны от опорной сейсмической границы в течение сезонных максимумов (т.е. если проводить съемку в январе и июне) на участках, где глубина воды равна или превышает 100 м. Что касается приливных изменений, экстремальный пример был бы получен при проведении сейсмических съемок в заливе Фанди,между канадскими атлантическими провинциями Нью Брансуик и Новая Шотландия. Здесь изменения прилива составляют около 15 м, что эквивалентно 20 мс двойного времени пробега сейсмической волны (принимая значение скорости в воде, равной 1500 м/с). Если одна съемка проведена при низком приливе, а вторая - при высоком (в предположении, что продолжительность съемок была очень короткой), то вычисление разности сейсмических данных без соответствующей временной коррекции, не даст удовлетворительных результатов. В общем случае ошибки увеличиваются с увеличением задержки сейсмических сигналов,при этом использование более широкополосных сейсмических импульсов приведет к увеличению ошибок при вычислении разности даже при небольших задержках. Выравнивание среднеквадратичных значений энергии (rmscorr). В наиболее совершенном эксперименте при осуществлении разновременного сейсмического мониторинга одна и та же сейсмическая партия должна проводить каждую контрольную съемку с точно таким же оборудованием и при одинаковых условиях (состояние моря) с ранее проведенной первоначальной базовой съемкой. Однако разница в условиях регистрации появляется даже в хорошо контролируемых ситуациях. Поэтому приведение данных сейсмических съемок к эквивалентному среднеквадратичному уровню необходимо, особенно, если она (среднеквадратичная энергия) значительно изменяется в период между съемками. В одном примере было проанализировано около 100 сейсмограмм ОСТ, полученных при проведении разновременных морских 3D съемок с интервалом около 18 месяцев, геометрия приемных устройств и аппаратура были почти идентичными, за исключением того, что одна съемка проводилась в летние месяцы, а другая зимой. Анализ средних значений амплитуд сейсмических данных внутри дискретных временных окон длительностью 200 мс показал,что существует амплитудное смещение между 17 данными основной и контрольной съемок по всему профилю. После применения сглаженной функции выравнивания амплитуд, входящей в состав корректирующей обработки внутри каждого временного окна, было отмечено, что расхождение между данными базовой и контрольной съемок уменьшилось. Не вызывает сомнений, что такие изменения необходимо скорректировать прежде, чем разностные разрезы разновременных съемок могут быть проинтерпретированы. Нормализация частотной полосы (mcorr) Уравнивание частотных полос сейсмических сигналов также является частью вычисления сейсмической разности. Если два сейсмических массива должны быть вычтены, то лучше это делать с сейсмическими данными, имеющими одинаковые спектры. Корректирующая обработка (если она достаточно надежна) должна исправить спектр одного сигнала таким образом, чтобы он согласовывался со вторым, но если корректирующая обработка не оптимизирована, появляются расхождения. Чем значительнее рассогласование спектров, тем больше ошибки. Тесты показывают, что остаточная энергия отраженных сигналов (т.е. энергия, которая остается после вычитания временных разрезов разных съемок и которая в идеальном случае должна быть полностью удалена), колеблется в пределах от 7% до 40% от амплитуды входных сигналов для импульсов с центральной частотой, различающейся на 2,5 Гц и 12,5 Гц(для сейсмического импульса Риккера с центральной частотой, смещавшейся дискретно через 2,5 Гц, и вычитавшегося из базового импульса Риккера с центральной частотой 30 Гц). Отклонения центральной частоты в диапазоне 12,5 Гц вполне приемлемы для самых ранних 3D съемок, но иногда встречаются большие отклонения частоты, и в этих случаях остаточная энергия отраженных сигналов увеличивается. Поэтому в соответствии с предлагаемыми вариантами обработки данных таких съемок выполняют корректирующую обработку для нормализации частотных спектров сейсмических сигналов с целью уменьшения возможных ошибок при определении разности сейсмических данных. Фазовое согласование (pcorr) И, наконец, ошибки могут быть также связаны с фазовым рассогласованием сейсмических сигналов. Например, для сейсмического 30 Гц импульса Риккера при повороте фазы на 5, 10,15, 30, 60 и 90 градусов относительно нулевой фазы остаточная энергия, вызванная поворотом фаз, может достигать 20% от амплитуды входного сигнала при фазовом рассогласовании всего в 15 градусов. Кроме того, человеческий глаз может с трудом уловить фазовые различия в 15 градусов и меньше, поэтому важно, чтобы оператор корректирующей обработки исправлял небольшие фазовые расхождения так же, как и 18 значительные. На ошибки, появляющиеся в результате фазового рассогласования, не влияют расхождения в частотных полосах сейсмических сигналов. Было отмечено, что остаточные ошибки в 20% могут появиться для сейсмических импульсов, различающихся по фазе на 15 градусов. Разность сейсмических данных Главная цель разновременного сейсмического мониторинга заключается в обнаружении изменений, которые связаны с внутрипоровым движением флюидов или отсутствии этого движения в интервале времени между съемками. В настоящее время это выполняется путем вычитания данных контрольной и базовой съемок после исправления данных в результате корректирующей обработки. На разностных данных с небольшим количеством остаточной энергии отраженных сигналов с более высокой вероятностью возможно обнаружение движения флюидов по сравнению с данными, имеющими высокий уровень остаточной энергии. Для иллюстрации эффективности корректирующей обработки будет приведено несколько разностных разрезов с корректирующей обработкой различных компонент, полученных при обработке данных разновременных съемок в Северном море. Мигрированные временные разрезы базовой и контрольной съемок, пересекающие площадь вне пределов месторождения, представлены на фиг. 4 и 5 соответственно, и преобладающая серия сильных статических отражений видна в интервале между 2000 и 2600 мс. В этом примере использовалось окно в интервале между 1900 и 2700 мс. Был разработан оператор длиной 800 мс, кроме того, применялась полосовая фильтрация 3/8 - 35/55 Гц для обоих массивов данных до корректирующей обработки. Поскольку это были отражения от статических отражающих границ (т.е. они являлись отраженными сигналами, представляющими неизменяющуюся часть геологической структуры внутри или около резервуара), то вычитание данных базовой и контрольной съемок должно было бы в идеальном случае дать очень маленькую остаточную энергию отраженных сигналов,так как обе съемки были проведены в идентичных условиях. Однако разностный разрез, полученный без применения какой-либо корректирующей обработки, показал, что вычитания нет. Остаточная энергия отраженных сигналов значительна. С таким большим количеством остаточной энергии, оставшимся на разностном разрезе, было бы трудно обнаружить любые перемещения флюидов (в других местах) в резервуаре. Сравнение разностного разреза, полученного без корректирующей обработки, с разрезами, в которых корректировался только амплитудный спектр или только фазовый спектр, или оба этих параметра, показало, что фазовая коррекция является наиболее существенной состав 19 ляющей в общей корректирующей процедуре,что подтверждается также результатами математического моделирования. Рассмотренная выше обработка производилась на платформе с множеством параллельных процессоров (например, IBM SP2, IntelParagon) и с программным обеспечением, совместимым с таким оборудованием (например,PGS Tensor s CUBE MANAGER TM). Вышеприведенное описание дано только как пример, и другие варианты могут реализоваться опытными геофизиками без отклонения от объема изобретения, которое определяется приведенной ниже формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ обнаружения физических изменений в резервуаре, включающий подготовку данных, по меньшей мере,двух сейсмических съемок резервуара, первая из которых проведена в первый период времени, а вторая - во второй период времени; и осуществление процесса сравнения данных первой сейсмической съемки с данными второй сейсмической съемки, предусматривающий выделение первой группы отраженных сигналов (например, волновых импульсов) в совокупности сейсмических данных, полученных при первой съемке, и имеющей соответствующую вторую группу отраженных сигналов в совокупности сейсмических данных, полученных при второй съемке, при этом: первая и вторая группы отраженных сигналов характеризуют неизмененную часть геологической структуры в резервуаре или вблизи него,первая группа отраженных сигналов представлена первой системой параметров, а вторая группа отраженных сигналов - второй системой параметров; определение допустимой пороговой разностной функции между первой и второй системами параметров волны; определение корректирующей функции для второй системы параметров, причем корректирующая функция характеризуется тем, что при приложении ее ко второй системе волновых параметров определяется скорректированная система параметров, при этом разность между данными первой и скорректированной систем волновых параметров будет ниже пороговой разностной функции; применение корректирующей функции при обработке третьей группы отраженных сигналов, которая связана с сейсмическими данными,полученными при второй съемке, при этом: формируется скорректированная третья группа отраженных сигналов,третьей группе отраженных сигналов соответствует четвертая группа отраженных сигна 001212 20 лов на совокупности сейсмических данных первой съемки,третья и четвертая группы отраженных сигналов представляют изменяющуюся часть резервуара; сравнение скорректированной третьей группы отраженных сигналов с четвертой группой путем вычитания третьей группы из четвертой. 2. Способ по п.1, отличающийся тем, что указанное выше определение допустимой пороговой разностной функции включает: итеративный подбор измененных параметров группы отраженных сигналов для второй системы параметров,применение измененных параметров при обработке данных со второй системой параметров, при этом формируется измененная система параметров,сравнение данных с измененной системой параметров с данными с первой системой параметров,при этом указанный итеративный подбор продолжается до тех пор, пока не будет достигнуто схождение результатов сравнения, и допустимая пороговая разностная функция включает измененную систему параметров группы отраженных сигналов, при которой было получено схождение. 3. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает амплитуду. 4. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает фазу. 5. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает частотную полосу. 6. Способ по п.2, отличающийся тем, что один из указанных параметров волны включает время. 7. Способ по п.2, отличающийся тем, что указанные параметры волны включают амплитуду, фазу, частотную полосу и время. 8. Способ по п.1, отличающийся тем, что определение корректирующей функции включает итеративный подбор измененных параметров группы отраженных сигналов для второй системы параметров,применение измененных параметров при обработке данных со второй системой параметров волны, при этом формируется измененная система параметров,сравнение данных с измененной системой параметров с данными первой системы параметров и определение допустимой пороговой разности,причем указанный итеративный подбор продолжают до тех пор, пока в результате проведения указанной операции сравнения разность данных с первой системой параметров с данны 21 ми с измененной системой параметров не станет ниже допустимой пороговой разности. 9. Способ по п.1, отличающийся тем, что указанное определение допустимой пороговой разностной функции включает определение разности между записью сигналов во временном окне первой трассы из совокупности сейсмических данных, полученных при первой съемке, и записью сигналов во временном окне второй трассы, полученной при проведении второй сейсмической съемки, при этом: вторая трасса включает отраженные сигналы, соответствующие отраженным сигналам на первой трассе,временное окно второй трассы соответствует временному окну первой трассы, и вычисление отношения разности сигналов в выделенных окнами участках первой и второй трасс к сигналу во временном окне первой трассы, и выбор значения допустимой пороговой разности меньшим, чем это отношение. 10. Способ по п.9, отличающийся тем, что разница в частотной полосе сигналов во временном окне первой трассы и временном окне второй трассы не превышает 25%. 11. Способ по п.10, отличающийся тем, что разница в частотной полосе сигналов во временном окне второй трассы и временном окне первой трассы менее 10%. 12. Способ по п.1, отличающийся тем, что указанное вычисление допустимой пороговой разностной функции включает определение разности между квадратом записи сигналов во временном окне первой трассы из данных первой съемки и квадратом записи сигналов во временном окне второй трассы из данных второй съемки,причем вторая трасса содержит отраженные сигналы, соответствующие отраженным сигналам на первой трассе, и временное окно второй трассы соответствует временному окну на первой трассе, и вычисление отношения разности квадратов записей сигналов в выделенных временными окнами участках записи первой и второй трасс к квадрату записи сигналов во временном окне первой трассы, и выбор допустимого порогового значения разности меньшим, чем это отношение. 13. Способ по п.7, отличающийся тем, что длительность временного окна равна длительности не менее двух импульсов отраженных сигналов. 14. Способ по п.13, отличающийся тем, что длительность временного окна равна длительности не менее пяти импульсов отраженных сигналов. 15. Способ по п.1, отличающийся тем, что указанное применение корректирующей функции к третьей группе отраженных сигналов во 22 второй совокупности сейсмических трасс включает свертку корректирующей функции с третьей группой отраженных сигналов на второй совокупности трасс. 16. Способ по п.1, отличающийся тем, что указанная первая совокупность данных включает трассу от сейсмоприемника. 17. Способ по п.1, отличающийся тем, что указанная вторая совокупность данных включает просуммированные сейсмические трассы от сейсмоприемников. 18. Способ по п.1, отличающийся тем, что указанные первая и вторая совокупности данных включают просуммированные трассы от расстановки скважинных приемников. 19. Способ по п.1, отличающийся тем, что первая и вторая совокупности данных включают данные после предварительной обработки. 20. Способ по п.19, отличающийся тем, что предварительно обработанные данные включают сейсмограммы OCT. 21. Способ по п.19, отличающийся тем, что указанные предварительно обработанные данные включают сейсмограммы ОПВ. 22. Способ по п.19, отличающийся тем, что указанные предварительно обработанные данные включают мигрированные данные. 23. Способ по п.1, отличающийся тем, что указанные первая и вторая совокупности данных подвергаются эквивалентной предварительной обработке. 24. Способ по п.1, отличающийся тем, что первая совокупность данных подвергается той же процедуре восстановления формы сигнала,что и вторая совокупность. 25. Способ по п.1, отличающийся тем, что первая совокупность данных подвергается той же деконволюционной обработке, что и вторая совокупность трасс. 26. Способ по п.1, отличающийся тем, что первая совокупность данных подвергается обработке с использованием тех же процедур подавления помех, что и вторая совокупность данных. 27. Способ по п.1, отличающийся тем, что и первая, и вторая совокупности данных подвергаются одинаковой обработке с целью подавления многократных волн. 28. Способ по п.1, отличающийся тем, что одинаковый DMO оператор используется при обработке первой и второй совокупностей данных. 29. Способ по п.1, отличающийся тем, что миграция первой и второй совокупностей данных производится с эквивалентной скоростной моделью среды. 30. Способ по п.1, отличающийся тем, что миграция первой и второй совокупностей данных производится с использованием одинакового оператора миграции. 31. Способ по п.1, отличающийся тем, что фильтрация первой и второй совокупностей 23 данных производится с использованием одинаковых фильтров. 32. Способ получения разностной записи для данных, по меньшей мере, двух сейсмических съемок, включающий подготовку данных, по меньшей мере,двух сейсмических съемок на одной и той же географической площади; и осуществление процесса деконволюции данных, по меньшей мере, двух сейсмических съемок, предусматривающий расчет деконволюционного оператора на основе использования, по меньшей мере, двух совокупностей сейсмических данных, из которых не менее двух совокупностей сейсмических данных были зарегистрированы в разное время; использование этого оператора деконволюции при обработке, по меньшей мере, двух совокупностей сейсмических данных; и проведение дальнейшей обработки данных разновременных съемок для получения разностной записи. 33. Способ по п.32, отличающийся тем, что не менее двух совокупностей данных включают не менее трех массивов сейсмических данных,причем каждый из этих массивов представляет записи, полученные при съемках, проведенных в разное время, при этом расчет оператора деконволюции производится на основе использования данных каждого массива. 34. Способ по п.32, отличающийся тем, что не менее двух совокупностей данных включает не менее трех массивов сейсмических данных,при этом каждый из этих массивов представляет записи, полученные при съемках, проведенных в разное время,расчет включает определение первого оператора деконволюции на основе первой и второй совокупностей данных, и первый деконволюционный оператор используется для обработки данных первой и второй совокупностей,дальнейшая обработка включает расчет второго оператора деконволюции на основе первой и третьей совокупностей данных, причем второй оператор деконволюции применяется для обработки первой и третьей совокупностей данных. 35. Способ по п.34, отличающийся тем, что первая совокупность данных представляет записи, полученные при съемке, проведенной до съемки, представленной вторым и третьим массивами данных. 36. Способ по п.34, отличающийся тем, что расчет первого оператора деконволюции включает осреднение спектра мощности для первой совокупности трасс данных первой съемки,обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности первой совокупности трасс во временной области,запоминание этой временной функции, 001212 24 осреднение спектра мощности для второй совокупности трасс данных второй съемки,обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности второй совокупности трасс во временной области,осреднение временных функций, представляющих средние значения спектров мощности первой и второй совокупностей трасс и расчет оператора деконволюции для обработки данных первой и второй съемок с использованием усредненных значений временных функций, отображающих средний спектр мощности первой и второй совокупностей. 37. Способ по п.32, отличающийся тем, что расчет оператора деконволюции включает: осреднение спектра мощности для первой совокупности трасс данных первой съемки; осреднение спектра мощности для второй совокупности трасс данных второй съемки; осреднение средних значений спектров мощности первой и второй совокупностей трасc и расчет оператора деконволюции для обработки данных первой и второй съемок на основе осредненных значений спектров мощности первой и второй совокупностей сейсмических трасс. 38. Способ формирования сигнала, характеризующего географическую площадь по результатам при проведении разновременных сейсмических съемок, включающий: подготовку данных, по меньшей мере,двух сейсмических съемок этой географической площади, первая из которых проведена в первый период времени, а вторая - во второй период времени; и осуществление процесса обработки этих сейсмических данных, предусматривающий выполнение графа обработки входных данных, полученных при первой съемке; выполнение этого же графа обработки входных данных, полученных при второй съемке; причем граф обработки определяется системой параметров сейсмических сигналов; выбор не менее одной системы параметров путем их подбора на основе данных обеих съемок, и использование не менее одной системы параметров, по меньшей мере, в одном графе при обработке данных, полученных как при первой, так и при второй съемках. 39. Способ по п.38, отличающийся тем,что, по меньшей мере, одна из систем параметров включает оператор деконволюции. 40. Способ по п.39, отличающийся тем, что он дополнительно включает расчет оператора деконволюции на основе использования, по меньшей мере, двух совокупностей сейсмических данных, причем не менее двух совокупностей сейсмических данных были зарегистрированы в разное время; использование этого оператора деконволюции при обработке, по крайней мере, двух совокупностей сейсмических данных; и проведение дальнейшей обработки данных разновременных съемок для получения разностной записи. 41. Способ по п.40, отличающийся тем, что не менее двух совокупностей данных включают не менее трех массивов сейсмических данных,причем каждый из них представлен записями,проведенными в разное время, при этом конструкция оператора деконволюции зависит от данных, полученных при каждой съемке. 42. Способ по п.40, отличающийся тем, что не менее двух совокупностей данных включают не менее трех массивов сейсмических данных,при этом: каждый из этих трех массивов представляет записи, полученные при проведении съемок в разное время,расчет первого оператора деконволюции основан на использовании первого и второго массива данных, и первый оператор деконволюции применяют при обработке первой и второй совокупностей данных,дальнейшая обработка включает расчет второго оператора деконволюции на основе использования данных, полученных при первой и третьей съемках, второй оператор деконволюции используют при обработке данных первой и третьей съемок. 43. Способ по п.42, отличающийся тем, что первая совокупность данных представлена записями, полученными при съемке, проведенной до съемки, представленной вторым и третьим массивами данных. 44. Способ по п.42, отличающийся тем, что расчет первого оператора деконволюции включает 26 осреднение спектра мощности для первой совокупности трасс данных первой съемки; обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности первой совокупности трасс во временной области; запоминание этой временной функции; усреднение спектра мощности для второй совокупности трасс данных второй съемки,обратное преобразование усредненных значений с получением функции, отображающей усредненный спектр мощности второй совокупности трасс во временной области; осреднение временных функций, представляющих средние значения спектров мощности первой и второй совокупностей трасс; и расчет оператора деконволюции для обработки данных первой и второй съемок с использованием усредненного значения временных функций, отображающих средние спектры мощности первой и второй совокупностей. 45. Способ по п.40, отличающийся тем, что расчет оператора деконволюции включает осреднение спектра мощности для первой совокупности сейсмических трасс данных первой съемки; осреднение спектра мощности для второй совокупности сейсмических трасс данных второй съемки,осреднение средних значений спектров мощности первой и второй совокупностей сейсмических трасс данных; и расчет оператора деконволюции для обработки данных первой и второй съемок на основе осредненного значения спектров мощности первой и второй совокупностей сейсмических трасс данных. Базовая съемка - мигрированный временной разрез с деконволюцией. Базовая съемка - мигрированный временной разрез с деконволюцией, при расчете которой использовались данные двух съемок. Контрольная съемка - мигрированный временной разрез с деконволюцией. Контрольная съемка - мигрированный временной разрез с деконволюцией, при расчете которой использовались данные двух съемок. Разность мигрированных временных разрезов, полученных при основной и контрольной съемках, с применением деконволюции. Разность необработанных временных разрезов, полученных при основной и контрольной съемках. Разность мигрированных временных разрезов, полученных при основной и контрольных съемках, с деконволюцией, рассчитанной по данным этих съемок.
МПК / Метки
МПК: G01V 1/28
Метки: съемок, способ, использованием, нефтегазовых, мониторинга, сейсмического, разновременных, месторождений
Код ссылки
<a href="https://eas.patents.su/16-1212-sposob-sejjsmicheskogo-monitoringa-neftegazovyh-mestorozhdenijj-s-ispolzovaniem-raznovremennyh-semok.html" rel="bookmark" title="База патентов Евразийского Союза">Способ сейсмического мониторинга нефтегазовых месторождений с использованием разновременных съемок</a>
Способ р.б.юна открытой разработки месторождений
Номер патента: 562
Опубликовано: 28.10.1999
Авторы: Юн Руслан Борисович, Борщ-Компониец Виталий Иванович
МПК: E21C 41/26
Метки: открытой, способ, разработки, р.б.юна, месторождений
Формула / Реферат:
1.Способ открытой разработки месторождений, предусматривающий отбойку основных запасов взрыванием нисходящих скважин с поверхности уступов и транспортом горной массы на поверхность, отличающийся тем, что отработку запасов горизонтов ведут с формированием вертикального или близкого к вертикальному откоса одного из бортов карьера в пределах этого горизонта, для чего у его контура формируют предохранительную призму, отбойку которой осуществляют на...
Способ р.б.юна комбинированной разработки месторождений
Номер патента: 568
Опубликовано: 29.12.1999
Авторы: Юн Руслан Борисович, Борщ-Компониец Виталий Иванович
МПК: E21C 41/00
Метки: р.б.юна, разработки, комбинированной, способ, месторождений
Формула / Реферат:
1. Способ комбинированной разработки месторождений, предусматривающий вскрытие его подземными выработками и отработку основных запасов открытыми горными работами с формированием предохранительных берм на уступах карьера, бурением нисходящих скважин с поверхности уступов и транспортом горной массы по подземным выработкам отрабатываемого горизонта на поверхность, отличающийся тем, что в плане отработку запасов каждого горизонта ведут в направлении...
Способ прогнозирования перспективных площадей для поиска месторождений углеводородов
Номер патента: 585
Опубликовано: 29.12.1999
Автор: Зейлик Борис Семенович
МПК: G01V 11/00, G01V 8/00
Метки: прогнозирования, поиска, перспективных, углеводородов, площадей, месторождений, способ
Формула / Реферат:
Способ прогнозирования перспективных площадей для поиска месторождений углеводородов путем проведения геолого-геофизических исследований для выявления структур, в пределах которых могут быть найдены месторождения нефти и газа, отличающийся тем, что в границах крупных и гигантских осадочных бассейнов по космофотоматериалам выделяют центральные поднятия, в контурах которых на основе дешифрирования космофотоматериалов выделяют срединную...
Инсектицидная композиция и способ борьбы с насекомыми c её использованием
Номер патента: 681
Опубликовано: 28.02.2000
Авторы: Деруа Жан, Готье Мартин
МПК: A01N 47/02
Метки: композиция, инсектицидная, насекомыми, борьбы, способ, использованием
Формула / Реферат:
1. Инсектицидная композиция в форме геля, содержащая от 0,001 до 5%, предпочтительно от 0,05 до 0,5% соединения формулы (I) в которой R1 означает атом галогена, группу CN или метил, R2 означает S(O)nR3, R3 означает алкил или галоалкил, R4 означает атом водорода или галогена, или радикал NR5R6, S(O)mR7, C(O)R7 или C(O)O-R7, алкил, галоалкил, OR8 или радикал N=C(R9) (R10), R5 и R6, независимо друг от друга, означают атом водорода, или...
Способ дезинтеграции культивированных клеток с использованием устройства на основе применения сталкивающихся струй
Номер патента: 703
Опубликовано: 28.02.2000
Авторы: Леу Франк С., Сиферт Дуглас Б.
Метки: дезинтеграции, устройства, клеток, сталкивающихся, применения, основе, способ, струй, использованием, культивированных
Формула / Реферат:
1. Способ дезинтеграции культивированных клеток, у которых отсутствует клеточная стенка, предусматривающий пропускание клеток, суспендированных в культуральной жидкости, через устройство со сталкивающимися струями при низком давлении, где давление меньше или равно 150 фунт/кв.дюйм (1034,2 кПа) и линейная скорость струи от 5 до 50 м/с. 2. Способ по п.1, отличающийся тем, что указанными клетками являются клетки животных. 3. Способ по п.2,...
Предыдущий патент: Способ ингибирования димеризации 4-аминопиперидина, композиция, содержащая ингибитор и её применение.
Следующий патент: Композиции жидкого алендроната
Случайный патент: Защищённый документ, способ его изготовления и использование элемента защиты