Трактор с гидравлическим приводом
Формула / Реферат
1. Трактор с гидравлическим приводом, содержащий
раму (11) трактора,
двигатель (24), установленный на раме трактора,
кабину (30) для оператора, установленную на раме трактора,
первое и второе ведущие колеса (12, 13) трактора, установленные на приводном конце (11А) трактора, при этом первое ведущее колесо (12) включает в себя первый приводной гидромотор (17) для приведения в движение первого колеса (12), а второе ведущее колесо (13) включает в себя второй приводной гидромотор (17) для приведения в движение второго колеса (13),
два ведомых колеса (14, 15) трактора, установленных на втором конце трактора,
при этом со стороны ведущих колес имеются установочные узлы (21, 22) для поддержания жатки (23) для срезания сельскохозяйственной культуры в рабочем положении,
первый и второй гидравлические насосы (25, 26), каждый из которых приводится в действие двигателем для создания источника рабочей жидкости для гидросистемы под давлением,
причем первый гидравлический насос (25) предназначен для приведения в действие первого гидромотора (17) первого ведущего колеса (12), а второй гидравлический насос (26) предназначен для приведения в действие второго гидромотора (17) второго ведущего колеса (13),
при этом первый гидравлический насос (25) выполнен с возможностью изменения рабочего объема первого гидравлического насоса между минимальной величиной и максимальной величиной для изменения скорости потока рабочей жидкости, используемой для подачи в первый гидромотор (17), когда первый гидравлический насос приводится в действие, а
второй гидравлический насос (26) выполнен с возможностью изменения рабочего объема второго гидравлического насоса между минимальной величиной и максимальной величиной для изменения скорости потока рабочей жидкости, используемой для подачи во второй гидромотор, когда второй гидравлический насос приводится в действие,
причем первый приводной гидромотор (17) имеет сервомеханизм (17А) регулирования рабочего объема, при этом трактор содержит блок (17С) управления, выполненный с возможностью управления сервомеханизмом (17А) таким образом, что обеспечивает непрерывную бесступенчатую регулировку рабочего объема первого приводного гидромотора (17) между минимальной величиной и максимальной величиной для изменения поступательной скорости первого ведущего колеса (12) относительно скорости потока рабочей жидкости, подаваемой в первый гидромотор,
второй приводной гидромотор (17) имеет сервомеханизм (17В) регулирования рабочего объема, при этом блок (17С) управления выполнен с возможностью управления сервомеханизмом (17В) таким образом, что обеспечивает непрерывную бесступенчатую регулировку рабочего объема второго приводного гидромотора между минимальной величиной и максимальной величиной для изменения поступательной скорости второго ведущего колеса (13) относительно скорости потока рабочей жидкости, подаваемой во второй гидромотор,
устройство (34) управления скоростью, выполненное с возможностью обеспечения выходного сигнала скорости между положениями переднего хода и заднего хода через нейтральное положение,
при этом устройство управления скоростью выполнено с возможностью изменения рабочего объема первого гидравлического насоса (25) и/или первого гидромотора (17) для изменения поступательной скорости первого ведущего колеса (12), причем
устройство управления скоростью выполнено с возможностью изменения рабочего объема второго гидравлического насоса (26) и/или второго гидромотора (17) для изменения поступательной скорости второго ведущего колеса (13), а также
устройство управления скоростью выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) симметрично для изменения общей поступательной скорости трактора,
систему (33, 51) рулевого управления, выполненную с возможностью обеспечения выходного сигнала рулевого управления между левым и правым положениями через среднее положение,
причем система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема первого гидравлического насоса (25) и/или первого гидромотора (17) для изменения поступательной скорости первого ведущего колеса (12), при этом
система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема второго гидравлического насоса (26) и/или второго гидромотора (17) для изменения поступательной скорости второго ведущего колеса (13), а также
система (33, 51) рулевого управления выполнена с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении.
2. Трактор по п.1, в котором система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема первого и второго гидравлических насосов (25, 26) без изменения рабочего объема первого и второго гидромоторов (17).
3. Трактор по п.1, в котором система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема первого и второго гидромоторов (17) без изменения рабочего объема первого и второго гидравлических насосов (25, 26).
4. Трактор по п.1, в котором система (33, 51) управления скоростью выполнена с возможностью изменения рабочего объема как первого и второго гидравлических насосов (25, 26), так и первого и второго гидромоторов (17).
5. Трактор по любому из пп.1-4, в котором система (33, 51) управления скоростью обеспечивает первый выходной сигнал для управления рабочим объемом первого и второго моторов (17) и второй выходной сигнал для управления рабочим объемом первого и второго насосов (25, 26).
6. Трактор по п.5, в котором один из первого и второго выходных сигналов представляет собой электрический сигнал, вырабатываемый электрическим датчиком, детектирующим перемещение устройства управления скоростью, при этом электрический сигнал подается в систему (34В) электронного управления.
7. Трактор по п.6, в котором другой из первого и второго выходных сигналов обеспечивается посредством механической связи (34А).
8. Трактор по п.6, в котором система (34В) электронного управления включает в себя программу, выполненную таким образом, что регулирование, производимое упомянутым электрическим сигналом, не является прямо пропорциональным положению рычага управления скоростью.
9. Трактор по п.8, в котором регулирование, производимое упомянутым электрическим сигналом, предназначено для управления регулированием первого и второго моторов (17) без изменения рабочего объема первого и второго насосов (25, 26).
10. Трактор по любому из пп.5-9, в котором первый выходной сигнал, вызывающий регулирование первого и второго моторов, является таким, что первый и второй моторы остаются при максимальном рабочем объеме для первой части регулирования устройства управления скоростью.
11. Трактор по любому из пп.5-9, в котором первый выходной сигнал, вызывающий регулирование первого и второго моторов, является таким, что первый и второй моторы достигают только установленного рабочего объема, который меньше, чем максимальный рабочий объем.
12. Трактор по п.11, в котором установленный рабочий объем выбирается оператором.
13. Трактор по п.11, который выполнен с возможностью работы в рабочем режиме и режиме транспортировки, при этом первый выходной сигнал, вызывающий регулирование первого и второго моторов, является таким, что предотвращается достижение максимального рабочего объема первым и вторым моторами (1) только в рабочем режиме, так что первый и второй моторы достигают максимального рабочего объема в режиме транспортировки.
14. Трактор по любому из пп.1-13, в котором замедление скорости движения вперед трактора осуществляется посредством возвращения рычага управления скоростью в нулевое положение, при этом устройство (34) управления скоростью и первый и второй моторы (17) выполнены так, что замедление до остановки осуществляется с первым и вторым моторами при максимальном рабочем объеме.
15. Трактор по любому из пп.1-14, в котором устройство (34) управления скоростью и моторы (17) выполнены так, что соотношение изменения рабочего объема первого и второго моторов относительно первого и второго насосов отличается во время ускорения и во время замедления.
16. Трактор по любому из пп.1-15, в котором устройство (34) управления скоростью и моторы (17) выполнены так, что первый и второй моторы изменяют рабочий объем с такой же скоростью, что первый и второй насосы по меньшей мере для части регулирования устройства управления скоростью во время ускорения.
17. Трактор по любому из пп.1-16, в котором устройство (34) управления скоростью, насосы (25, 26) и моторы (17) выполнены так, что во время замедления рабочий объем первого и второго насосов снижается с более быстрой скоростью, чем увеличивается рабочий объем первого и второго моторов.
18. Трактор по любому из пп.1-17, в котором система (33, 51) рулевого управления содержит первое устройство (33) рулевого управления, выполненное с возможностью обеспечения первого выходного сигнала рулевого управления между левым и правым положениями через среднее положение, и второе устройство (51) рулевого управления, независимое от первого устройства рулевого управления и выполненное с возможностью обеспечения второго выходного сигнала рулевого управления между левым и правым положениями через среднее положение,
причем первое устройство (33) рулевого управления выполнено с возможностью изменения рабочего объема первого гидравлического насоса (25) без изменения рабочего объема первого гидромотора для изменения поступательной скорости первого ведущего колеса (12),
первое устройство (33) рулевого управления выполнено с возможностью изменения рабочего объема второго гидравлического насоса (26) без изменения рабочего объема второго гидромотора для изменения поступательной скорости второго ведущего колеса (13),
первое устройство (33) рулевого управления выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении,
при этом второе устройство (51) рулевого управления выполнено с возможностью изменения рабочего объема первого гидромотора без изменения рабочего объема первого гидравлического насоса для изменения поступательной скорости первого ведущего колеса (12),
второе устройство (51) рулевого управления выполнено с возможностью изменения рабочего объема второго гидромотора без изменения рабочего объема второго гидравлического насоса для изменения поступательной скорости второго ведущего колеса (13),
второе устройство (51) рулевого управления выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении,
в результате чего осуществляется рулевое управление трактора посредством первого устройства (33) рулевого управления и второго устройства (51) рулевого управления независимо друг от друга.
19. Трактор по п.18, в котором первое устройство (33) рулевого управления выполнено с возможностью ручного управления оператором, а второе устройство (51) рулевого управления выполнено с возможностью управления в ответ на сигнал от автоматической системы рулевого управления.

Текст
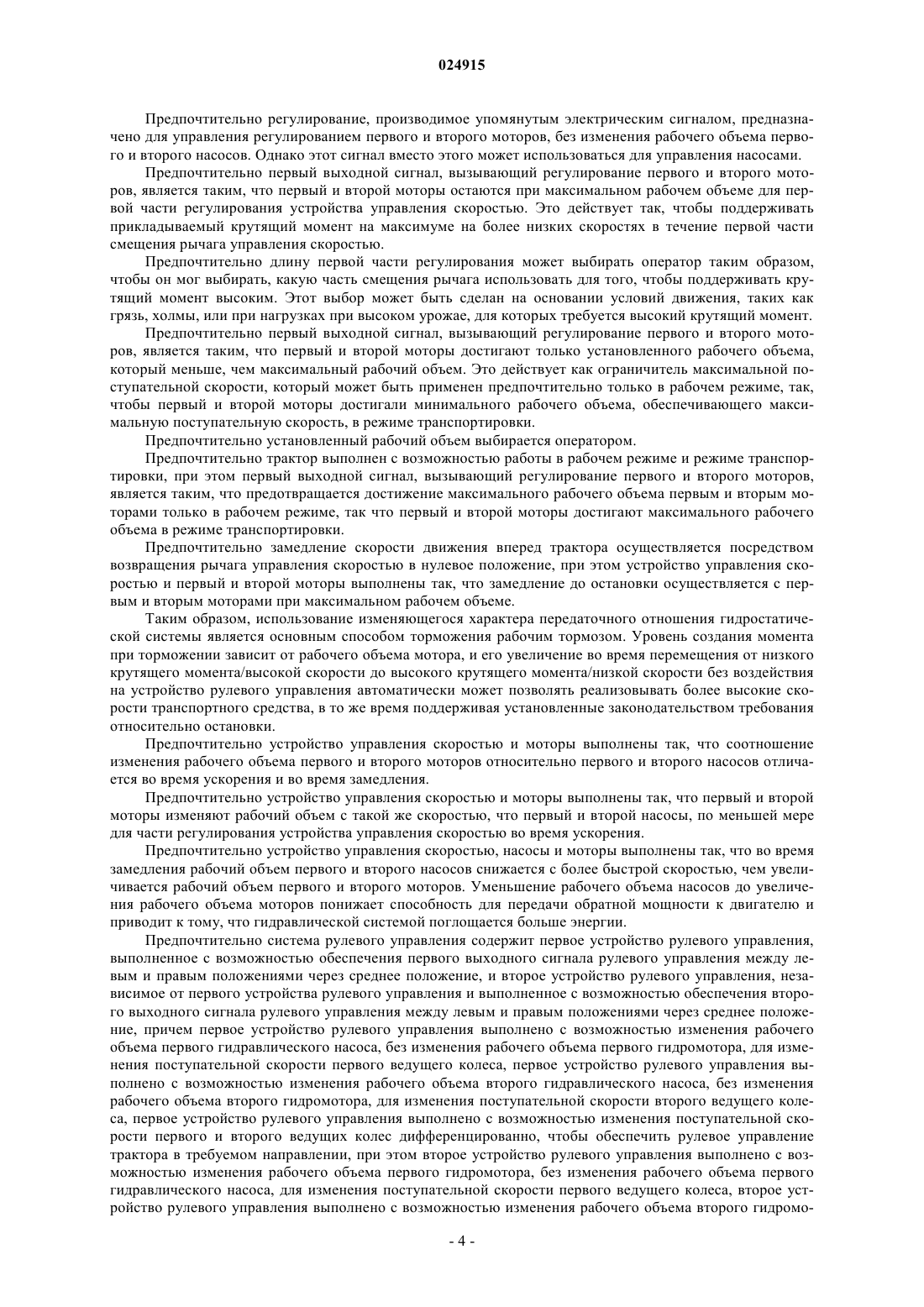
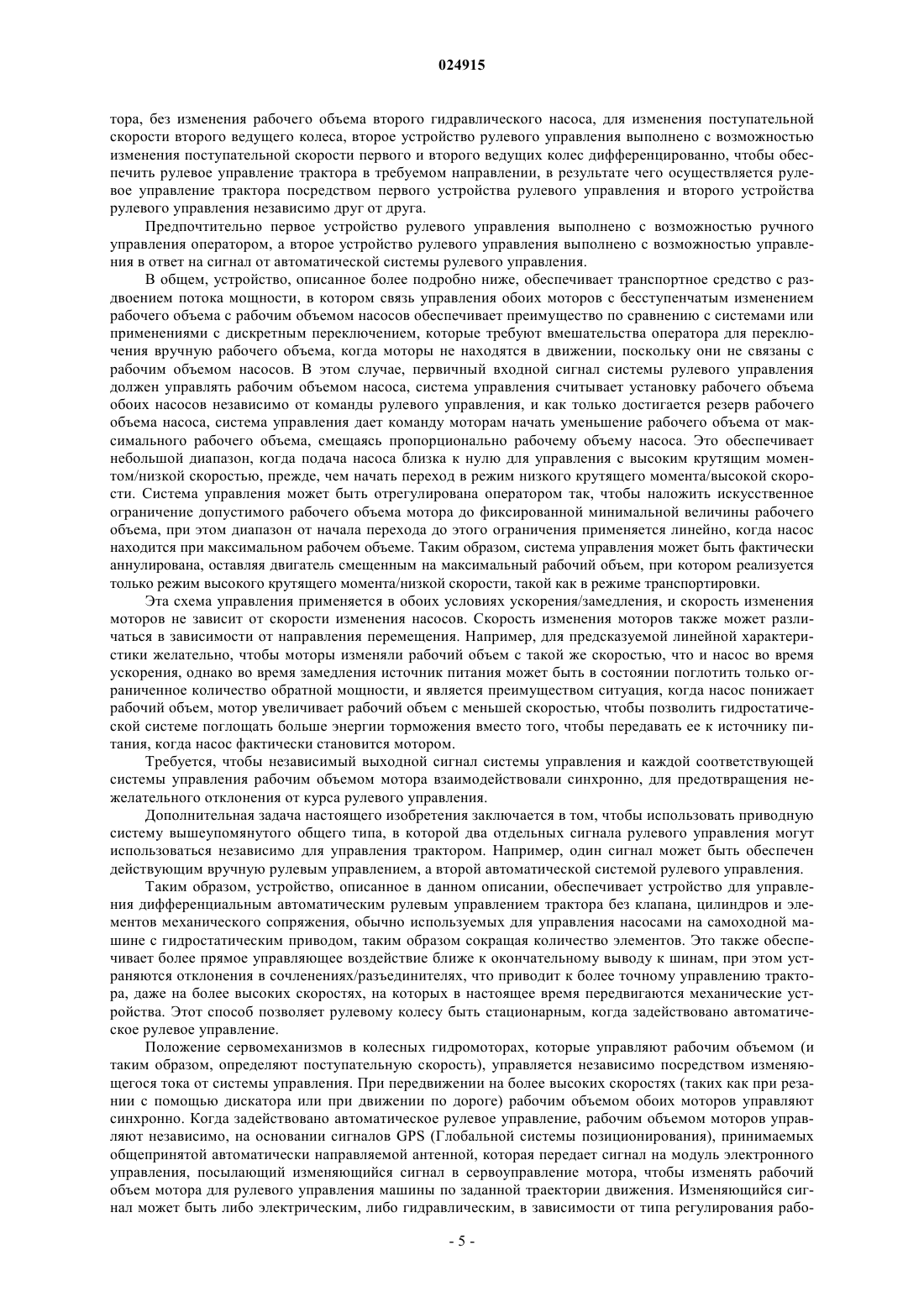
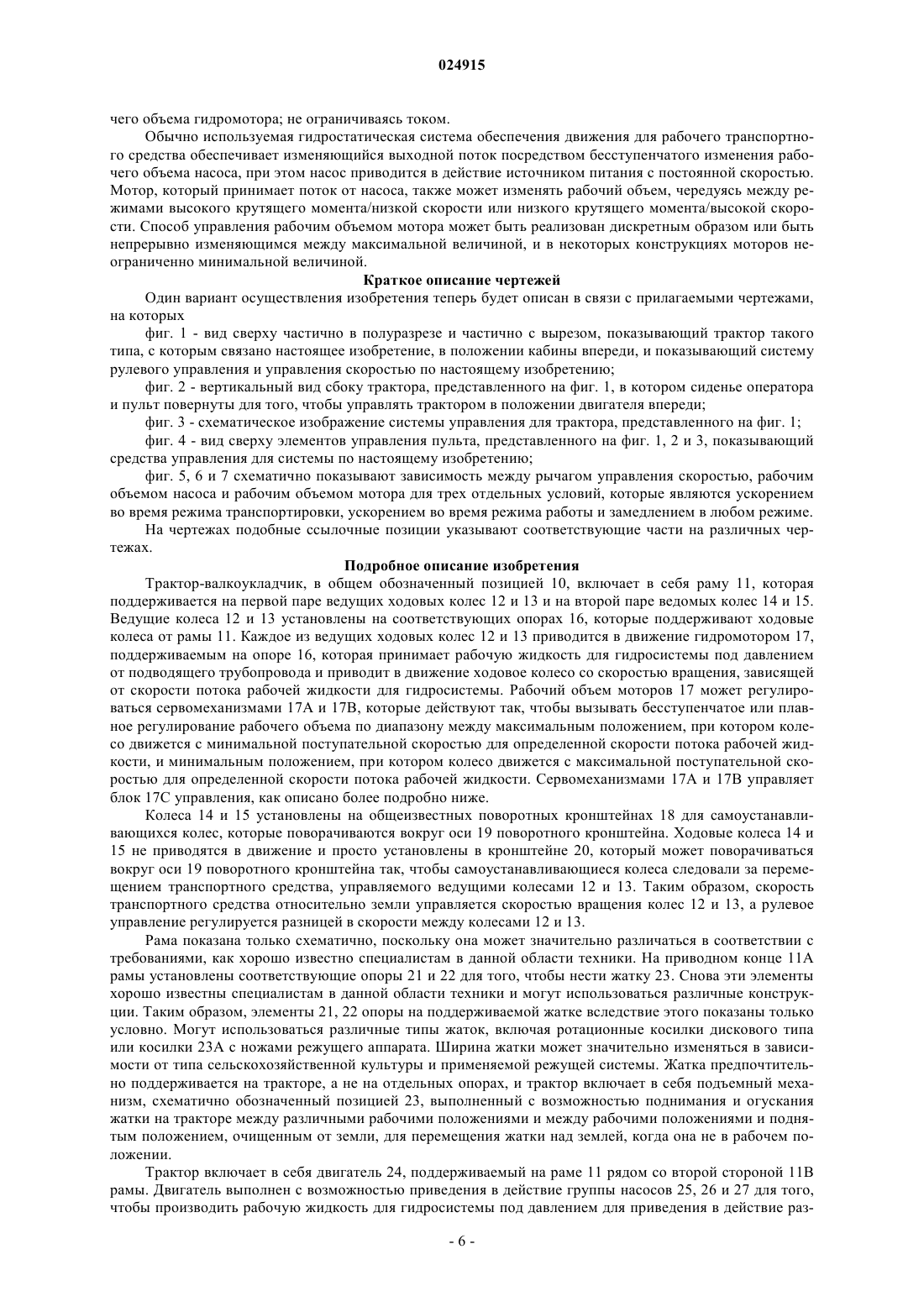
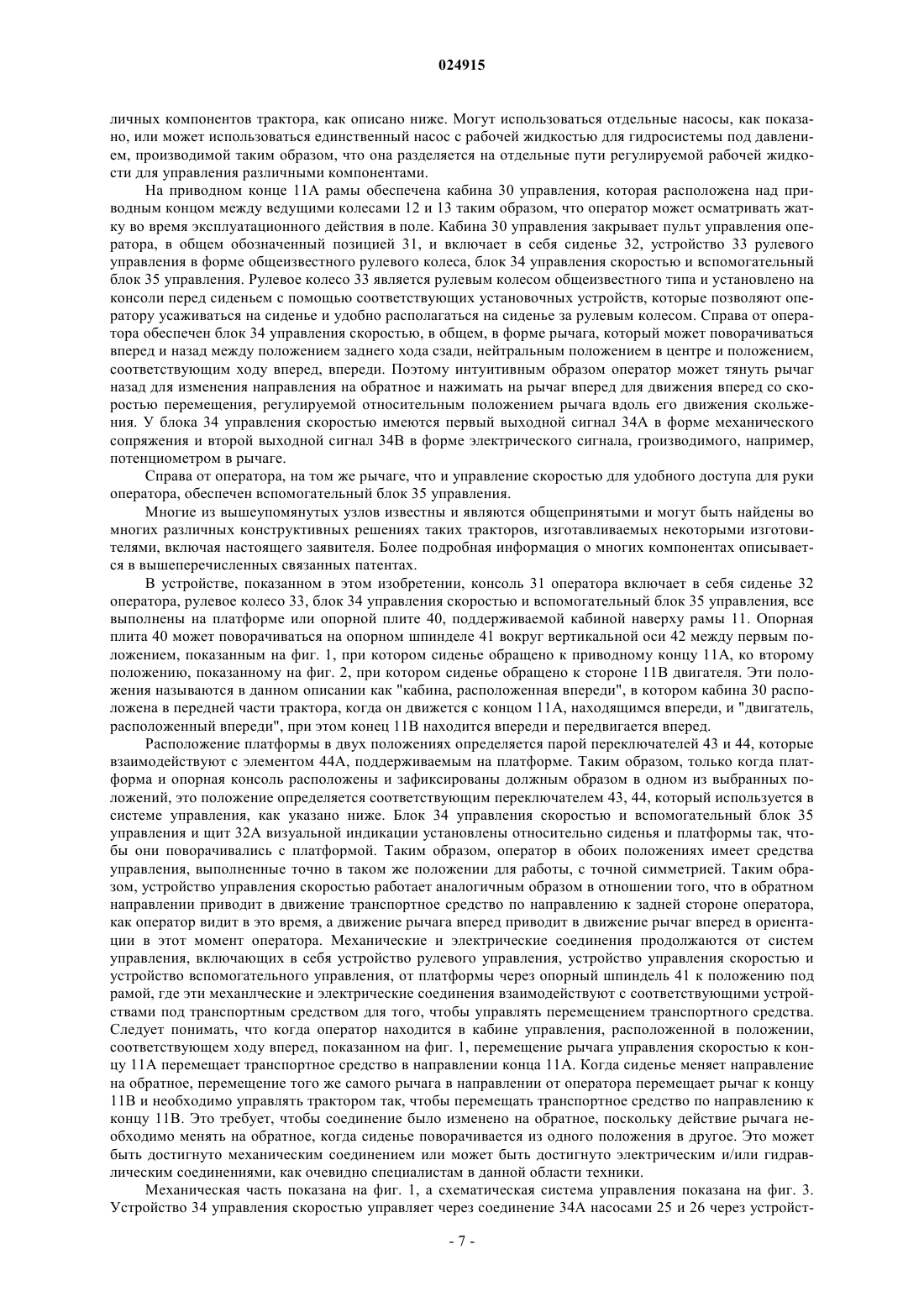
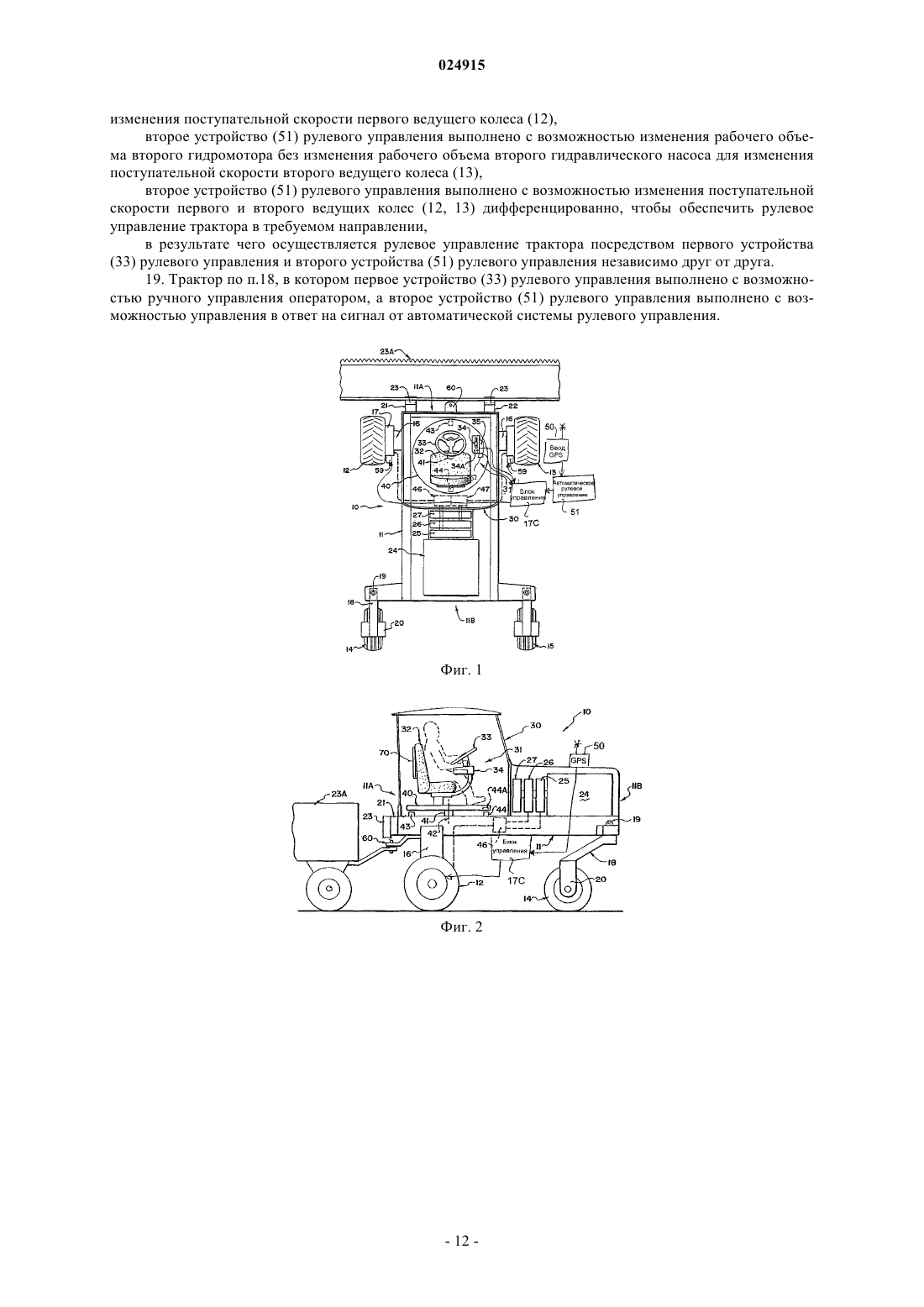
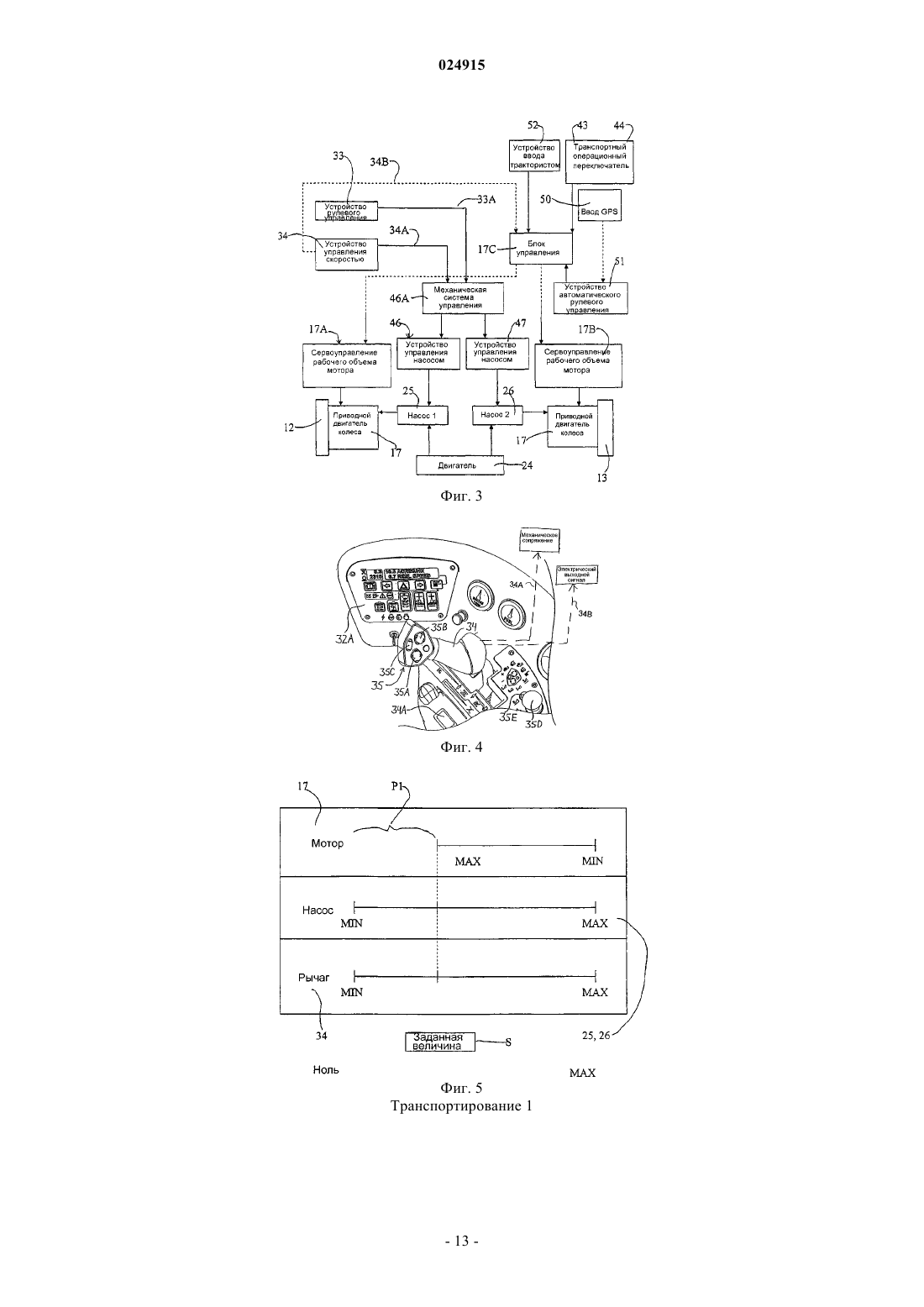
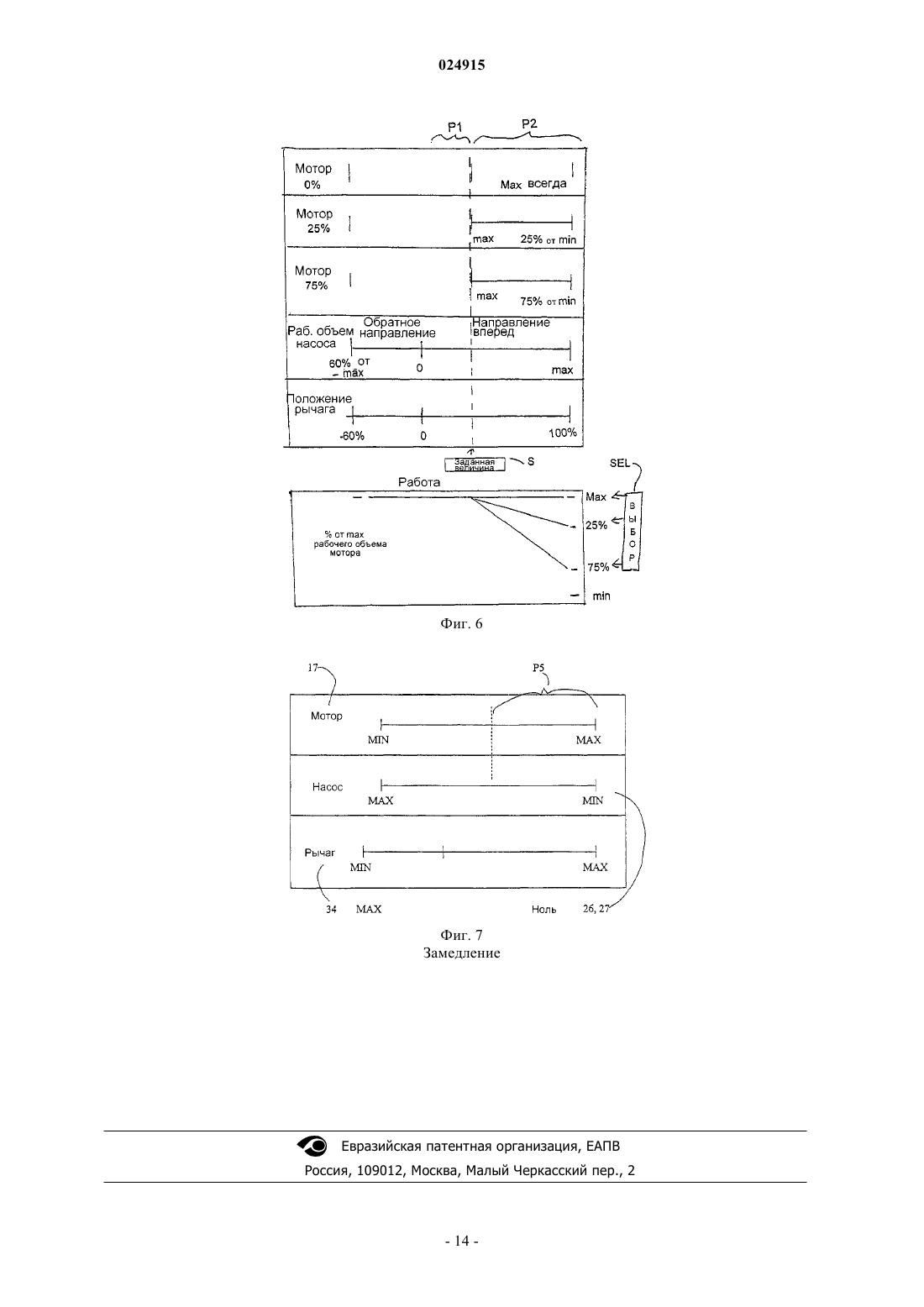
Предложен трактор, который имеет колеса с гидравлическим приводом со стороны кабины и ведомые колеса со стороны двигателя. Каждое из ведущих колес приводится в движение гидромотором с непрерывным регулированием рабочего объема мотора, при этом мотор выполнен с возможностью приведения в действие насосом, также имеющим регулируемый рабочий объем. Рабочим объемом мотора управляет электронный регулятор в ответ на ход рычага управления скоростью, чтобы управлять рабочим объемом для обеспечения требуемых крутящих моментов на валу привода в различных точках длины рабочего хода. Обеспечена автоматическая система рулевого управления, имеющая регулятор наведения, выполненный с возможностью приема информации о местоположении GPS, которая управляет рулевым управлением, дифференцированно регулируя рабочий объем моторов так, что автоматическое рулевое управление не зависит от ручного рулевого управления, которое управляет насосами. Настоящее изобретение относится к трактору с гидравлическим приводом типа трактора, обычно,но не обязательно, используемого в качестве трактора валкоукладчика, который поддерживается на паре колес с гидравлическим приводом и паре ведомых колес и направляется посредством дифференциальной скорости между ведущими колесами. Родственные более ранние патенты Ссылка делается на следующие патенты и заявки от того же заявителя, каждое из раскрытия которых обеспечивает более подробную информацию, которая может использоваться в машинах, раскрытых в данном описании. Патент США 8245489 (Talbot), выданный 21 августа 2012 г., который раскрывает зерноуборочный комбайн, в котором жатка поддерживается на копирующих колесах. Патент США 8225903 (Dunn), выданный 24 июля 20012, который раскрывает трактор типа, подходящего для использования там, где трактор включает в себя навесную систему. Патент США 8020648 (Otto), выданный 20 сентября 2011 г., который раскрывает трактор типа, подходящего для использования там, где трактор имеет заднее навесное устройство. Патент США 7958706 (Remillard), выданный 14 июня 2011 г., который раскрывает трактор типа,подходящего для использования там, где трактор включает в себя управление скоростью вращения мотовила. Патент США 7918076 (Talbot), выданный 5 апреля 2011 г., который раскрывает жатку типа, подходящего для использования там, где жатка имеет три секции, которые включают в себя балансировку подъемных сил по трем секциям. Патент США 7721830 (Dunn), выданный 25 мая 2010 г., который раскрывает трактор типа, подходящего для использования с рулевым управлением. Патент США 7373769 (Talbot), выданный 20 мая 2008 г., который раскрывает жатку с изнашивающимся экраном под режущим механизмом. Патент США 7347277 (Enns), выданный 25 марта 2008 г., который раскрывает жатку с автономной системой транспортировки. Патент США 7472533 (Talbot), выданный 6 января 2009 г., который раскрывает жатку с режущим механизмом и полотенным транспортером с уплотнением между полотенным транспортером и режущим механизмом. Патент США 7159687 (Dunn), выданный 9 января 2007 г., который раскрывает трактор типа, подходящего для использования там, где трактор поддерживает жатку по ее передней поверхности для перемещения по полю для формирования валка из сельскохозяйственной культуры на корню, при этом трактор может менять направление на обратное для транспортировки. Уровень техники Транспортные средства с гидростатическим рулевым управлением были доступны на протяжении многих лет, и их применение для рядковых жаток было важным. Существовал предел скорости транспортировки этих рядковых жаток из-за нарушения устойчивости на высокой скорости с ведущими колесами, расположенными перед самоустанавливающимися колесами (с расположением кабины впереди). Более высокие скорости на дороге позволяют пользователю преодолевать большие дистанции без использования трейлеров и буксирных машин. Обычно используемая гидростатическая система обеспечения движения для трактора обеспечивает регулируемый выходной поток посредством бесступенчатого или непрерывного изменения рабочего объема насоса, при этом насос приводится в действие двигателем с постоянной скоростью. Мотор, который принимает поток от насоса, также может изменяться в рабочем объеме, чтобы чередоваться между режимами с высоким крутящим моментом/низкой скоростью или с низким крутящим моментом/высокой скоростью. Управление рабочим объемом мотора, как правило, реализуется скачкообразно или в дискретных диапазонах. Переход двигателя между диапазонами с высоким крутящим моментом/низкой скоростью и с низким крутящим моментом/высокой скоростью, в то время как транспортное средство находится в движении, является желательной характеристикой трансмиссии. От неподвижного состояния и на более низких скоростях высокий крутящий момент позволяет преодолевать силу инерции остановившегося транспортного средства, сопротивление качению, усилие для преодоления подъема. Когда существует потребность в низком крутящем моменте, скорость транспортного средства может быть увеличена, чтобы снизить время транспортировки или улучшить эффективность системы, понижая скорость работы источника энергии, приводящего в действие насос. В гидростатической системе с раздвоением потока мощности, в такой как транспортное средство рядковой жатки, имеются две независимые гидростатические системы, которые приводят в движение колеса на противоположных сторонах механического устройства. Благодаря изменению вращения каждого колеса достигаются скорость, направление и рулевое управление транспортного средства. В типичном применении используется компактная коробка передач для снижения скорости, которая помещается внутри и поддерживает колесо. Эта коробка передач приводится в действие мотором, и крутящий момент умножается на уровень, подходящий для поступательного движения транспортного средства. На транспортном средстве с раздвоением потока мощности передаточное отношение, как правило, устанавливают так, что двигатель с изменяющейся скоростью вращения должен обеспечивать широкий диапазон скоростей на выводном валу, чтобы приспосабливаться к рабочим операциям с высоким крутящим моментом/низкой скоростью и транспортировке с низким крутящим моментом/высокой скоростью между рабочими местоположениями. Передаточное отношение устанавливается, как синхронизирование операции переключения передаточного отношения между двумя независимыми коробками передач, при этом может быть трудно поддерживать заданные скорости вращения колес и важное рулевое управление. Синхронизирование скорости вращения гидромотора постоянного рабочего объема каждой индивидуальной гидростатической системы для обеспечения возможности механического изменения передаточных отношений может быть в равной мере сложным и трудным. Пара коробок передач с бесступенчато регулируемым передаточным отношением может быть применена вместо или последовательно с фиксированной коробкой передач, однако следует понимать, что это снижает экономичность в применении изза сложного характера этого типа механизма. В торможении рабочим тормозом на транспортном средстве с раздвоением потока мощности трудно использовать стандартные технические приемы фрикционного торможения, поскольку их может быть сложно точно применять с правильной величиной момента при торможении на колесах, снабженных независимыми тормозами, чтобы ограничить воздействие на рулевое управление. Управление рабочим объемом мотора, которое переключается между 2 или 3 дискретными ступенями передачи, может основываться на внутренних пружинах и силах, прикладываемых гидравлическим давлением и неуправляемым потоком, который обеспечивает непредсказуемые характеристики переключения, особенно в применениях с раздвоением потока мощности, в которых гидравлическое давление нагнетается параллельно в оба мотора. В применении с раздвоением потока мощности во время переключения мотора это может приводить к нежелательному отклонению от курса рулевого управления. Дискретные переключаемые ступени передачи также ограничивают гибкость в отношении того, чтобы приспосабливать в пределах фиксированного диапазона бесступенчатую установку скорости/крутящего момента. Раскрытие изобретения Задача настоящего изобретения заключается в том, чтобы создать трактор вышеупомянутого типа,который имеет улучшенную приводную систему. В соответствии с одним аспектом изобретения предложен трактор с гидравлическим приводом, содержащий раму трактора,двигатель, установленный на раме трактора,кабину для оператора, установленную на раме трактора,первое и второе ведущие колеса трактора, установленные на приводном конце трактора, при этом первое ведущее колесо включает в себя первый приводной гидромотор для приведения в движение первого колеса, а второе ведущее колесо включает в себя второй приводной гидромотор для приведения в движение второго колеса,два ведомых колеса трактора, установленных на втором конце трактора,при этом со стороны ведущих колес имеются установочные узлы для поддержания жатки для срезания сельскохозяйственной культуры в рабочем положении,первый и второй гидравлические насосы, каждый из которых приводится в действие двигателем для создания источника рабочей жидкости для гидросистемы под давлением,причем первый гидравлический насос предназначен для приведения в действие первого гидромотора первого ведущего колеса, а второй гидравлический насос предназначен для приведения в действие второго гидромотора второго ведущего колеса,при этом первый гидравлический насос выполнен с возможностью изменения рабочего объема первого гидравлического насоса между минимальной величиной и максимальной величиной для изменения скорости потока рабочей жидкости, используемой для подачи в первый гидромотор, когда первый гидравлический насос приводится в действие, а второй гидравлический насос выполнен с возможностью изменения рабочего объема второго гидравлического насоса между минимальной величиной и максимальной величиной для изменения скорости потока рабочей жидкости, используемой для подачи во второй гидромотор, когда второй гидравлический насос приводится в действие,причем первый приводной гидромотор имеет сервомеханизм регулирования рабочего объема, при этом трактор содержит блок управления, выполненный с возможностью управления сервомеханизмом таким образом, что обеспечивает непрерывную бесступенчатую регулировку рабочего объема первого приводного гидромотора между минимальной величиной и максимальной величиной для изменения поступательной скорости первого ведущего колеса относительно скорости потока рабочей жидкости, подаваемой в первый гидромотор,второй приводной гидромотор имеет сервомеханизм регулирования рабочего объема, при этом блок управления выполнен с возможностью управления сервомеханизмом таким образом, что обеспечивает непрерывную бесступенчатую регулировку рабочего объема второго приводного гидромотора между минимальной величиной и максимальной величиной для изменения поступательной скорости второго ведущего колеса относительно скорости потока рабочей жидкости, подаваемой во второй гидромотор,устройство управления скоростью, выполненное с возможностью обеспечения выходного сигнала скорости между положениями переднего хода и заднего хода через нейтральное положение,при этом устройство управления скоростью выполнено с возможностью изменения рабочего объема первого гидравлического насоса и/или первого гидромотора для изменения поступательной скорости первого ведущего колеса, причем устройство управления скоростью выполнено с возможностью изменения рабочего объема второго гидравлического насоса и/или второго гидромотора для изменения поступательной скорости второго ведущего колеса, а также устройство управления скоростью выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес симметрично для изменения общей поступательной скорости трактора,систему рулевого управления, выполненную с возможностью обеспечения выходного сигнала рулевого управления между левым и правым положениями через среднее положение,причем система рулевого управления выполнена с возможностью изменения рабочего объема первого гидравлического насоса и/или первого гидромотора для изменения поступательной скорости первого ведущего колеса, при этом система рулевого управления выполнена с возможностью изменения рабочего объема второго гидравлического насоса и/или второго гидромотора для изменения поступательной скорости второго ведущего колеса, а также система рулевого управления выполнена с возможностью изменения поступательной скорости первого и второго ведущих колес дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении. Моторы с бесступенчатым или плавным регулированием обеспечивают управление рабочим объемом пропорционально нагнетаемому извне изменяющемуся гидравлическому давлению или изменяющемуся току. Рабочий объем задается непрерывно между установкой максимальной величины и минимальной величины, которые ограничиваются механически. Установка рабочего объема по умолчанию смещается либо к максимальной величине, либо к минимальной величине, и посредством применения пропорционального управления заставляет рабочий объем оказывать противодействие этому смещению. Имеются различные конфигурации того, как может быть установлено сервоуправление рабочим объемом мотора; как правило, они могут принимать либо изменяющийся электрический сигнал (различных типов: тока, напряжения или другого типа), либо изменяющийся сигнал гидравлического давления. Рабочий объем по умолчанию, когда никакой изменяющийся управляющий сигнал не присутствует, физически ограничивается его максимальной величиной или минимальной величиной; также в некоторых случаях это зависит от того, как выполнен мотор. Это смещение по умолчанию может быть результатом конфигурации внутренних пружин и/или гидравлического давления. Когда прикладывается изменяющийся управляющий сигнал, он противодействует этому устанавливаемому по умолчанию смещению и изменяет рабочий объем соответствующим образом. Предпочтительно система рулевого управления выполнена с возможностью изменения рабочего объема первого и второго гидравлических насосов, без изменения рабочего объема первого и второго гидромоторов. Однако также можно обеспечить рулевое управление посредством изменения рабочего объема мотора, оставляя рабочий объем насоса в симметричном режиме только для управления скоростью. Другими словами, в альтернативном устройстве система рулевого управления предпочтительно выполнена с возможностью изменения рабочего объема первого и второго гидромоторов, без изменения рабочего объема первого и второго гидравлических насосов. Предпочтительно система управления скоростью выполнена с возможностью изменения рабочего объема как первого и второго гидравлических насосов, так и первого и второго гидромоторов. Предпочтительно система управления скоростью обеспечивает первый выходной сигнал для управления рабочим объемом первого и второго моторов, и второй выходной сигнал для управления рабочим объемом первого и второго насосов. Предпочтительно один из первого и второго выходных сигналов представляет собой электрический сигнал, вырабатываемый электрическим датчиком, детектирующим перемещение устройства управления скоростью, при этом электрический сигнал подается в систему электронного управления. Это может быть удобно обеспечено с помощью потенциометра на рычаге управления скоростью, который обеспечивает выходное напряжение, пропорциональное смещению рычага оператором. Предпочтительно другой из первого и второго выходных сигналов обеспечивается посредством механической связи, в которой используются общепринятые приводные системы для управления механическим ходом насоса. Подходящее устройство для этой конструкции раскрывается в вышеупомянутом патенте США 7721830. Предпочтительно система электронного управления включает в себя программу, выполненную так,что регулирование, производимое упомянутым электрическим сигналом, не является прямо пропорциональным положению рычага управления скоростью. Предпочтительно регулирование, производимое упомянутым электрическим сигналом, предназначено для управления регулированием первого и второго моторов, без изменения рабочего объема первого и второго насосов. Однако этот сигнал вместо этого может использоваться для управления насосами. Предпочтительно первый выходной сигнал, вызывающий регулирование первого и второго моторов, является таким, что первый и второй моторы остаются при максимальном рабочем объеме для первой части регулирования устройства управления скоростью. Это действует так, чтобы поддерживать прикладываемый крутящий момент на максимуме на более низких скоростях в течение первой части смещения рычага управления скоростью. Предпочтительно длину первой части регулирования может выбирать оператор таким образом,чтобы он мог выбирать, какую часть смещения рычага использовать для того, чтобы поддерживать крутящий момент высоким. Этот выбор может быть сделан на основании условий движения, таких как грязь, холмы, или при нагрузках при высоком урожае, для которых требуется высокий крутящий момент. Предпочтительно первый выходной сигнал, вызывающий регулирование первого и второго моторов, является таким, что первый и второй моторы достигают только установленного рабочего объема,который меньше, чем максимальный рабочий объем. Это действует как ограничитель максимальной поступательной скорости, который может быть применен предпочтительно только в рабочем режиме, так,чтобы первый и второй моторы достигали минимального рабочего объема, обеспечивающего максимальную поступательную скорость, в режиме транспортировки. Предпочтительно установленный рабочий объем выбирается оператором. Предпочтительно трактор выполнен с возможностью работы в рабочем режиме и режиме транспортировки, при этом первый выходной сигнал, вызывающий регулирование первого и второго моторов,является таким, что предотвращается достижение максимального рабочего объема первым и вторым моторами только в рабочем режиме, так что первый и второй моторы достигают максимального рабочего объема в режиме транспортировки. Предпочтительно замедление скорости движения вперед трактора осуществляется посредством возвращения рычага управления скоростью в нулевое положение, при этом устройство управления скоростью и первый и второй моторы выполнены так, что замедление до остановки осуществляется с первым и вторым моторами при максимальном рабочем объеме. Таким образом, использование изменяющегося характера передаточного отношения гидростатической системы является основным способом торможения рабочим тормозом. Уровень создания момента при торможении зависит от рабочего объема мотора, и его увеличение во время перемещения от низкого крутящего момента/высокой скорости до высокого крутящего момента/низкой скорости без воздействия на устройство рулевого управления автоматически может позволять реализовывать более высокие скорости транспортного средства, в то же время поддерживая установленные законодательством требования относительно остановки. Предпочтительно устройство управления скоростью и моторы выполнены так, что соотношение изменения рабочего объема первого и второго моторов относительно первого и второго насосов отличается во время ускорения и во время замедления. Предпочтительно устройство управления скоростью и моторы выполнены так, что первый и второй моторы изменяют рабочий объем с такой же скоростью, что первый и второй насосы, по меньшей мере для части регулирования устройства управления скоростью во время ускорения. Предпочтительно устройство управления скоростью, насосы и моторы выполнены так, что во время замедления рабочий объем первого и второго насосов снижается с более быстрой скоростью, чем увеличивается рабочий объем первого и второго моторов. Уменьшение рабочего объема насосов до увеличения рабочего объема моторов понижает способность для передачи обратной мощности к двигателю и приводит к тому, что гидравлической системой поглощается больше энергии. Предпочтительно система рулевого управления содержит первое устройство рулевого управления,выполненное с возможностью обеспечения первого выходного сигнала рулевого управления между левым и правым положениями через среднее положение, и второе устройство рулевого управления, независимое от первого устройства рулевого управления и выполненное с возможностью обеспечения второго выходного сигнала рулевого управления между левым и правым положениями через среднее положение, причем первое устройство рулевого управления выполнено с возможностью изменения рабочего объема первого гидравлического насоса, без изменения рабочего объема первого гидромотора, для изменения поступательной скорости первого ведущего колеса, первое устройство рулевого управления выполнено с возможностью изменения рабочего объема второго гидравлического насоса, без изменения рабочего объема второго гидромотора, для изменения поступательной скорости второго ведущего колеса, первое устройство рулевого управления выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении, при этом второе устройство рулевого управления выполнено с возможностью изменения рабочего объема первого гидромотора, без изменения рабочего объема первого гидравлического насоса, для изменения поступательной скорости первого ведущего колеса, второе устройство рулевого управления выполнено с возможностью изменения рабочего объема второго гидромо-4 024915 тора, без изменения рабочего объема второго гидравлического насоса, для изменения поступательной скорости второго ведущего колеса, второе устройство рулевого управления выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении, в результате чего осуществляется рулевое управление трактора посредством первого устройства рулевого управления и второго устройства рулевого управления независимо друг от друга. Предпочтительно первое устройство рулевого управления выполнено с возможностью ручного управления оператором, а второе устройство рулевого управления выполнено с возможностью управления в ответ на сигнал от автоматической системы рулевого управления. В общем, устройство, описанное более подробно ниже, обеспечивает транспортное средство с раздвоением потока мощности, в котором связь управления обоих моторов с бесступенчатым изменением рабочего объема с рабочим объемом насосов обеспечивает преимущество по сравнению с системами или применениями с дискретным переключением, которые требуют вмешательства оператора для переключения вручную рабочего объема, когда моторы не находятся в движении, поскольку они не связаны с рабочим объемом насосов. В этом случае, первичный входной сигнал системы рулевого управления должен управлять рабочим объемом насоса, система управления считывает установку рабочего объема обоих насосов независимо от команды рулевого управления, и как только достигается резерв рабочего объема насоса, система управления дает команду моторам начать уменьшение рабочего объема от максимального рабочего объема, смещаясь пропорционально рабочему объему насоса. Это обеспечивает небольшой диапазон, когда подача насоса близка к нулю для управления с высоким крутящим моментом/низкой скоростью, прежде, чем начать переход в режим низкого крутящего момента/высокой скорости. Система управления может быть отрегулирована оператором так, чтобы наложить искусственное ограничение допустимого рабочего объема мотора до фиксированной минимальной величины рабочего объема, при этом диапазон от начала перехода до этого ограничения применяется линейно, когда насос находится при максимальном рабочем объеме. Таким образом, система управления может быть фактически аннулирована, оставляя двигатель смещенным на максимальный рабочий объем, при котором реализуется только режим высокого крутящего момента/низкой скорости, такой как в режиме транспортировки. Эта схема управления применяется в обоих условиях ускорения/замедления, и скорость изменения моторов не зависит от скорости изменения насосов. Скорость изменения моторов также может различаться в зависимости от направления перемещения. Например, для предсказуемой линейной характеристики желательно, чтобы моторы изменяли рабочий объем с такой же скоростью, что и насос во время ускорения, однако во время замедления источник питания может быть в состоянии поглотить только ограниченное количество обратной мощности, и является преимуществом ситуация, когда насос понижает рабочий объем, мотор увеличивает рабочий объем с меньшей скоростью, чтобы позволить гидростатической системе поглощать больше энергии торможения вместо того, чтобы передавать ее к источнику питания, когда насос фактически становится мотором. Требуется, чтобы независимый выходной сигнал системы управления и каждой соответствующей системы управления рабочим объемом мотора взаимодействовали синхронно, для предотвращения нежелательного отклонения от курса рулевого управления. Дополнительная задача настоящего изобретения заключается в том, чтобы использовать приводную систему вышеупомянутого общего типа, в которой два отдельных сигнала рулевого управления могут использоваться независимо для управления трактором. Например, один сигнал может быть обеспечен действующим вручную рулевым управлением, а второй автоматической системой рулевого управления. Таким образом, устройство, описанное в данном описании, обеспечивает устройство для управления дифференциальным автоматическим рулевым управлением трактора без клапана, цилиндров и элементов механического сопряжения, обычно используемых для управления насосами на самоходной машине с гидростатическим приводом, таким образом сокращая количество элементов. Это также обеспечивает более прямое управляющее воздействие ближе к окончательному выводу к шинам, при этом устраняются отклонения в сочленениях/разъединителях, что приводит к более точному управлению трактора, даже на более высоких скоростях, на которых в настоящее время передвигаются механические устройства. Этот способ позволяет рулевому колесу быть стационарным, когда задействовано автоматическое рулевое управление. Положение сервомеханизмов в колесных гидромоторах, которые управляют рабочим объемом (и таким образом, определяют поступательную скорость), управляется независимо посредством изменяющегося тока от системы управления. При передвижении на более высоких скоростях (таких как при резании с помощью дискатора или при движении по дороге) рабочим объемом обоих моторов управляют синхронно. Когда задействовано автоматическое рулевое управление, рабочим объемом моторов управляют независимо, на основании сигналов GPS (Глобальной системы позиционирования), принимаемых общепринятой автоматически направляемой антенной, которая передает сигнал на модуль электронного управления, посылающий изменяющийся сигнал в сервоуправление мотора, чтобы изменять рабочий объем мотора для рулевого управления машины по заданной траектории движения. Изменяющийся сигнал может быть либо электрическим, либо гидравлическим, в зависимости от типа регулирования рабо-5 024915 чего объема гидромотора; не ограничиваясь током. Обычно используемая гидростатическая система обеспечения движения для рабочего транспортного средства обеспечивает изменяющийся выходной поток посредством бесступенчатого изменения рабочего объема насоса, при этом насос приводится в действие источником питания с постоянной скоростью. Мотор, который принимает поток от насоса, также может изменять рабочий объем, чередуясь между режимами высокого крутящего момента/низкой скорости или низкого крутящего момента/высокой скорости. Способ управления рабочим объемом мотора может быть реализован дискретным образом или быть непрерывно изменяющимся между максимальной величиной, и в некоторых конструкциях моторов неограниченно минимальной величиной. Краткое описание чертежей Один вариант осуществления изобретения теперь будет описан в связи с прилагаемыми чертежами,на которых фиг. 1 - вид сверху частично в полуразрезе и частично с вырезом, показывающий трактор такого типа, с которым связано настоящее изобретение, в положении кабины впереди, и показывающий систему рулевого управления и управления скоростью по настоящему изобретению; фиг. 2 - вертикальный вид сбоку трактора, представленного на фиг. 1, в котором сиденье оператора и пульт повернуты для того, чтобы управлять трактором в положении двигателя впереди; фиг. 3 - схематическое изображение системы управления для трактора, представленного на фиг. 1; фиг. 4 - вид сверху элементов управления пульта, представленного на фиг. 1, 2 и 3, показывающий средства управления для системы по настоящему изобретению; фиг. 5, 6 и 7 схематично показывают зависимость между рычагом управления скоростью, рабочим объемом насоса и рабочим объемом мотора для трех отдельных условий, которые являются ускорением во время режима транспортировки, ускорением во время режима работы и замедлением в любом режиме. На чертежах подобные ссылочные позиции указывают соответствующие части на различных чертежах. Подробное описание изобретения Трактор-валкоукладчик, в общем обозначенный позицией 10, включает в себя раму 11, которая поддерживается на первой паре ведущих ходовых колес 12 и 13 и на второй паре ведомых колес 14 и 15. Ведущие колеса 12 и 13 установлены на соответствующих опорах 16, которые поддерживают ходовые колеса от рамы 11. Каждое из ведущих ходовых колес 12 и 13 приводится в движение гидромотором 17,поддерживаемым на опоре 16, которая принимает рабочую жидкость для гидросистемы под давлением от подводящего трубопровода и приводит в движение ходовое колесо со скоростью вращения, зависящей от скорости потока рабочей жидкости для гидросистемы. Рабочий объем моторов 17 может регулироваться сервомеханизмами 17 А и 17 В, которые действуют так, чтобы вызывать бесступенчатое или плавное регулирование рабочего объема по диапазону между максимальным положением, при котором колесо движется с минимальной поступательной скоростью для определенной скорости потока рабочей жидкости, и минимальным положением, при котором колесо движется с максимальной поступательной скоростью для определенной скорости потока рабочей жидкости. Сервомеханизмами 17 А и 17B управляет блок 17 С управления, как описано более подробно ниже. Колеса 14 и 15 установлены на общеизвестных поворотных кронштейнах 18 для самоустанавливающихся колес, которые поворачиваются вокруг оси 19 поворотного кронштейна. Ходовые колеса 14 и 15 не приводятся в движение и просто установлены в кронштейне 20, который может поворачиваться вокруг оси 19 поворотного кронштейна так, чтобы самоустанавливающиеся колеса следовали за перемещением транспортного средства, управляемого ведущими колесами 12 и 13. Таким образом, скорость транспортного средства относительно земли управляется скоростью вращения колес 12 и 13, а рулевое управление регулируется разницей в скорости между колесами 12 и 13. Рама показана только схематично, поскольку она может значительно различаться в соответствии с требованиями, как хорошо известно специалистам в данной области техники. На приводном конце 11 А рамы установлены соответствующие опоры 21 и 22 для того, чтобы нести жатку 23. Снова эти элементы хорошо известны специалистам в данной области техники и могут использоваться различные конструкции. Таким образом, элементы 21, 22 опоры на поддерживаемой жатке вследствие этого показаны только условно. Могут использоваться различные типы жаток, включая ротационные косилки дискового типа или косилки 23 А с ножами режущего аппарата. Ширина жатки может значительно изменяться в зависимости от типа сельскохозяйственной культуры и применяемой режущей системы. Жатка предпочтительно поддерживается на тракторе, а не на отдельных опорах, и трактор включает в себя подъемный механизм, схематично обозначенный позицией 23, выполненный с возможностью поднимания и огускания жатки на тракторе между различными рабочими положениями и между рабочими положениями и поднятым положением, очищенным от земли, для перемещения жатки над землей, когда она не в рабочем положении. Трактор включает в себя двигатель 24, поддерживаемый на раме 11 рядом со второй стороной 11 В рамы. Двигатель выполнен с возможностью приведения в действие группы насосов 25, 26 и 27 для того,чтобы производить рабочую жидкость для гидросистемы под давлением для приведения в действие раз-6 024915 личных компонентов трактора, как описано ниже. Могут использоваться отдельные насосы, как показано, или может использоваться единственный насос с рабочей жидкостью для гидросистемы под давлением, производимой таким образом, что она разделяется на отдельные пути регулируемой рабочей жидкости для управления различными компонентами. На приводном конце 11 А рамы обеспечена кабина 30 управления, которая расположена над приводным концом между ведущими колесами 12 и 13 таким образом, что оператор может осматривать жатку во время эксплуатационного действия в поле. Кабина 30 управления закрывает пульт управления оператора, в общем обозначенный позицией 31, и включает в себя сиденье 32, устройство 33 рулевого управления в форме общеизвестного рулевого колеса, блок 34 управления скоростью и вспомогательный блок 35 управления. Рулевое колесо 33 является рулевым колесом общеизвестного типа и установлено на консоли перед сиденьем с помощью соответствующих установочных устройств, которые позволяют оператору усаживаться на сиденье и удобно располагаться на сиденье за рулевым колесом. Справа от оператора обеспечен блок 34 управления скоростью, в общем, в форме рычага, который может поворачиваться вперед и назад между положением заднего хода сзади, нейтральным положением в центре и положением,соответствующим ходу вперед, впереди. Поэтому интуитивным образом оператор может тянуть рычаг назад для изменения направления на обратное и нажимать на рычаг вперед для движения вперед со скоростью перемещения, регулируемой относительным положением рычага вдоль его движения скольжения. У блока 34 управления скоростью имеются первый выходной сигнал 34 А в форме механического сопряжения и второй выходной сигнал 34 В в форме электрического сигнала, гроизводимого, например,потенциометром в рычаге. Справа от оператора, на том же рычаге, что и управление скоростью для удобного доступа для руки оператора, обеспечен вспомогательный блок 35 управления. Многие из вышеупомянутых узлов известны и являются общепринятыми и могут быть найдены во многих различных конструктивных решениях таких тракторов, изготавливаемых некоторыми изготовителями, включая настоящего заявителя. Более подробная информация о многих компонентах описывается в вышеперечисленных связанных патентах. В устройстве, показанном в этом изобретении, консоль 31 оператора включает в себя сиденье 32 оператора, рулевое колесо 33, блок 34 управления скоростью и вспомогательный блок 35 управления, все выполнены на платформе или опорной плите 40, поддерживаемой кабиной наверху рамы 11. Опорная плита 40 может поворачиваться на опорном шпинделе 41 вокруг вертикальной оси 42 между первым положением, показанным на фиг. 1, при котором сиденье обращено к приводному концу 11 А, ко второму положению, показанному на фиг. 2, при котором сиденье обращено к стороне 11 В двигателя. Эти положения называются в данном описании как "кабина, расположенная впереди", в котором кабина 30 расположена в передней части трактора, когда он движется с концом 11 А, находящимся впереди, и "двигатель,расположенный впереди", при этом конец 11 В находится впереди и передвигается вперед. Расположение платформы в двух положениях определяется парой переключателей 43 и 44, которые взаимодействуют с элементом 44 А, поддерживаемым на платформе. Таким образом, только когда платформа и опорная консоль расположены и зафиксированы должным образом в одном из выбранных положений, это положение определяется соответствующим переключателем 43, 44, который используется в системе управления, как указано ниже. Блок 34 управления скоростью и вспомогательный блок 35 управления и щит 32 А визуальной индикации установлены относительно сиденья и платформы так, чтобы они поворачивались с платформой. Таким образом, оператор в обоих положениях имеет средства управления, выполненные точно в таком же положении для работы, с точной симметрией. Таким образом, устройство управления скоростью работает аналогичным образом в отношении того, что в обратном направлении приводит в движение транспортное средство по направлению к задней стороне оператора,как оператор видит в это время, а движение рычага вперед приводит в движение рычаг вперед в ориентации в этот момент оператора. Механические и электрические соединения продолжаются от систем управления, включающих в себя устройство рулевого управления, устройство управления скоростью и устройство вспомогательного управления, от платформы через опорный шпиндель 41 к положению под рамой, где эти механлческие и электрические соединения взаимодействуют с соответствующими устройствами под транспортным средством для того, чтобы управлять перемещением транспортного средства. Следует понимать, что когда оператор находится в кабине управления, расположенной в положении,соответствующем ходу вперед, показанном на фиг. 1, перемещение рычага управления скоростью к концу 11 А перемещает транспортное средство в направлении конца 11 А. Когда сиденье меняет направление на обратное, перемещение того же самого рычага в направлении от оператора перемещает рычаг к концу 11 В и необходимо управлять трактором так, чтобы перемещать транспортное средство по направлению к концу 11 В. Это требует, чтобы соединение было изменено на обратное, поскольку действие рычага необходимо менять на обратное, когда сиденье поворачивается из одного положения в другое. Это может быть достигнуто механическим соединением или может быть достигнуто электрическим и/или гидравлическим соединениями, как очевидно специалистам в данной области техники. Механическая часть показана на фиг. 1, а схематическая система управления показана на фиг. 3. Устройство 34 управления скоростью управляет через соединение 34 А насосами 25 и 26 через устройст-7 024915 ва 46 и 47 управления насосами. Насос 25 поставляет рабочую жидкость в приводной двигатель 17 колеса 12. Насос 26 поставляет рабочую жидкость в двигатель 17 колеса 13. Насосами управляют так, чтобы управлять рабочим объемом насосов и, следовательно, количеством производимой рабочей жидкости,обычным образом. Скорость потока рабочей жидкости управляет скоростью вращения соответствующего двигателя так, чтобы колеса вращались на выбранной скорости, определяемой управлением насосов 25 и 26. Соединение 34 А осуществляет связь с системой 46 А управления, которая выполнена с возможностью обеспечения заданной операции устройств 46, 47 управления. Пример конструкции этой системы показан в вышеупомянутом патенте США 7721830. Кроме того, устройство 33 рулевого управления управляет насосами 25 и 26, чтобы производить разницу в их потоке и, таким образом, производить разницу в скорости двигателей 17. На схематической иллюстрации системы, показанной на фиг. 3, эта операция показана как выполняемая посредством механического сопряжения 33 А, продолжающегося к системе 46 А управления так, чтобы система использовала управляющее воздействие от сопряжения 34 А и от сопряжения 33 А для управления насосами 25 и 26, чтобы управлять поступательным движением и управлять рулевым управлением способом, изложенным, например, в вышеупомянутом патенте. Как показано на фиг. 3, блок 17 С управления также реагирует на управляющее воздействие от датчиков 43 и 44 переключателей сиденья так, чтобы действие многих из систем, показанных на фиг. 3, было возможно, только когда переключатель сиденья активизирован, указывая, что платформа находится в выбранном одном из двух положений. Кроме того, индикация от соответствующего переключателя сиденья выбранного положения консоли сиденья вводится в блок управления, чтобы угравлять эксплуатацией трактора в зависимости от ориентации с расположением кабины впереди или с расположением двигателя впереди, то есть в зависимости от того, находится ли трактор в рабочем режиме или в режиме транспортировки. Система 50 определения местонахождения GPS обеспечивает ввод в модуль 51 автоматического рулевого управления, который обеспечивает управляющие сигналы для блока 17 А управления. Таким образом, направлением трактора можно управлять, как изложено ниже, посредством автоматического рулевого управления независимо от механического управления, обеспечиваемого системой 46 А управления и устройствами 46 и 47 управления насосами. Устройство 33 рулевого управления выполнено с возможностью изменения рабочего объема гидравлическлх насосов без изменения рабочего объема гидромоторов для изменения поступательной скорости ведущих колес дифференцированно, чтобы производить рулевое управление трактора в требуемом направлении. Таким образом, устройство 33 рулевого управления выполнено с возможностью изменения рабочего объема первого и второго гидравлических насосов без изменения рабочего объема первого и второго гидромоторов. Устройство 51 автоматического рулевого управления выполнено с возможностью изменения рабочего объема мотора, оставляя рабочий объем насоса в симметричном режиме только для управления скоростью. Обратимся теперь к фиг. 5, на которой рычаг 34 блока управления скоростью обеспечивает управление, как описано выше, первого и второго гидравлических насосов 25, 26, чтобы изменять рабочий объем между минимальной величиной и максимальной величиной для изменения скорости потока рабочей жидкости, производимой для подачи в первый гидромотор, когда первый гидравлический насос приводится в действие. Каждый из приводных гидромоторов 17 имеет рабочий объем, который является плавно регулируемым между минимальной величиной и максимальной величиной для изменения поступательной скорости первого ведущего колеса относительно скорости потока рабочей жидкости, подаваемой в первый гидромотор. Рычаг 34 блока управления скоростью выполнен с возможностью обеспечения выходного сигнала скорости между положением заднего хода и положением, соответствующим ходу вперед, показанным на фиг. 5, через нейтральное положение. Рычаг 34 блока управления скоростью выполнен с возможностью изменения рабочего объема и гидравлических насосов 25, 26, и гидромоторов 17 для изменения поступательной скорости ведущих колес симметрично, чтобы изменять общую поступательную скорость трактора посредством обеспечения двух отдельных выходных сигналов 34 А, 34 В, при этом первый выходной сигнал 34 В используется для управления рабочим объемом первого и зторого моторов, а второй выходной сигнал 34 А используется для управления рабочим объемом первого и второго насосов. Первый и второй выходные сигналы представляют собой электрический сигнал, вырабатываемый электрическим датчиком, детектирующим перемещение управления скоростью, и могут удобно обеспечиваться потенциометром на рычаге управления скоростью, который обеспечивает выходное напряжение, пропорциональное смещению рычага оператором. Второй выходной сигнал обеспечивается посредством механического сопряжения 34 А, которое использует общеизвестные приводные системы, чтобы управлять механическим ходом насоса. Как показано на фиг. 5, система 17 С электронного управления включает в себя программу, выполненную таким образом, что регулирование, производимое упомянутым электрическим сигналом, не является прямо пропорциональным положению рычага управления скоростью. Как показано на фиг. 6, система управления может быть отрегулирована оператором, как показано позицией SEL (выбор), чтобы наложить искусственное ограничение разрешенного рабочего объема мотора до фиксированной минимальной величины рабочего объема, при этом диапазон от начала перехода к ограничению применяется линейно, когда насос имеет максимальный рабочий объем. Таким образом,система управления может быть фактически отменена, оставляя мотор смещенным к максимальному рабочему объему, когда реализуется только режим высокого крутящего момента/низкой скорости, такой как в режиме транспортировки. Эта скорость изменения моторов таким образом является не зависимой от скорости изменения насосов. Скорость изменения мотора также может различаться в зависимости от направления перемещения. Например, для предсказуемой линейной характеристики желательно, чтобы моторы изменяли рабочи/t объем с такой же скоростью, как и насос во время ускорения. Однако во время замедления, как показано на фиг. 7 позицией Р 5, источник питания может быть в состоянии поглощать только ограниченное количество обратной мощности, и является преимущественной ситуация, при которой когда насос понижает рабочий объем, то мотор увеличивает рабочий объем с меньшей скоростью, чем насосы, чтобы позволить гидростатической системе поглощать больше энергии торможения вместо того, чтобы передавать ее к источнику питания, когда насос фактически становится мотором. Таким образом, на фиг. 6 показана схема изменения рабочего объема мотора, которое происходит на основании насоса/положения рычага. Таким образом, как показано, первая часть регулирования P1 иP2 не регулируется оператором, а устанавливается в управляющей программе на некоторую произвольную заданную величину S, как показано, приблизительно на 30% между 0 и 100% насоса/установки рычага. Однако оператор в состоянии корректировать, как показано в SEL, минимальный предел мотора от 0% (максимального рабочего объема мотора) до величины немного меньше, чем 100% (минимального рабочего объема мотора) в рабочем режиме, который применяется линейно к насосу/диапазону рычага,начиная с заданной величины S. Как показано на фиг. 5, первый выходной сигнал 34 В, вызывающий регулирование первого и второго моторов, выполнен таким образом, что первый и второй моторы остаются при максимальном рабочем объеме для первой части Р 1 регулирования рычага управления скоростью. Это действует так, чтобы поддерживать прикладываемый крутящий момент на максимальной величине на более низких скоростях в течение первой части Р 1 смещения рычага управления скоростью. Также первый выходной сигнал 34 В, вызывающий регулирование первого и второго моторов 17,как показано на фиг. 6, является таким образом, что предотвращает достижение минимального рабочего объема моторами. Таким образом, на пониженном уровне, моторы удерживаются от достижения минимального рабочего объема в процентном соотношении приблизительно на 25% или 75%. Это действует как ограничитель максимальной поступательной скорости, который может быть применен предпочтительно только в рабочем режиме, представленном на фиг. 6, так, чтобы первый и второй моторы достигали минимального рабочего объема, обеспечивающего максимальную поступательную скорость в режиме транспортировки, как показано в положении транспортировки на более высокой скорости, представленном на фиг. 5. Как показано на диаграмме замедления на фиг. 7, замедление скорости движения вперед трактора производится посредством возвращения управления скоростью в нулевое положение так, чтобы было произведено замедление до остановки с первым и вторым моторами 17, имеющими максимальный рабочий объем, который обеспечивает максимальный тормозящий момент от двигателя. Таким образом, уровень создания момента при замедлении зависит от рабочего объема мотора, и увеличение его автоматически во время перемещения от низкого крутящего момента/высокой скорости к высокому крутящему моменту/низкой скорости без воздействия на рулевое управление позволяет реализовывать более высокие скорости транспортного средства, в то же время поддерживая установленные законодательством требования относительно остановки. Как можно видеть, сравнивая фиг. 5 и 7, устройство управления скоростью и моторы выполнены таким образом, что соотношение изменения рабочего объема первого и второго моторов относительно первого и второго насосов отличается во время ускорения и во время замедления. Как правило, устройство управления скоростью и моторы выполнены в части хода рычага 34 таким образом, что первый и второй моторы изменяют рабочий объем с той же скоростью, что первый и второй насосы, для части регулирования управления скоростью во время ускорения. Как показано на фиг. 7, устройство управления скоростью, насосы и моторы выполнены таким образом, что во время части замедления рабочий объем первого и второго насосов снижается с более высокой скоростью, чем увеличивается рабочий объем первого и второго моторов. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Трактор с гидравлическим приводом, содержащий раму (11) трактора,двигатель (24), установленный на раме трактора,кабину (30) для оператора, установленную на раме трактора,первое и второе ведущие колеса (12, 13) трактора, установленные на приводном конце (11 А) трактора, при этом первое ведущее колесо (12) включает в себя первый приводной гидромотор (17) для приведения в движение первого колеса (12), а второе ведущее колесо (13) включает в себя второй приводной гидромотор (17) для приведения в движение второго колеса (13),два ведомых колеса (14, 15) трактора, установленных на втором конце трактора,при этом со стороны ведущих колес имеются установочные узлы (21, 22) для поддержания жатки(23) для срезания сельскохозяйственной культуры в рабочем положении,первый и второй гидравлические насосы (25, 26), каждый из которых приводится в действие двигателем для создания источника рабочей жидкости для гидросистемы под давлением,причем первый гидравлический насос (25) предназначен для приведения в действие первого гидромотора (17) первого ведущего колеса (12), а второй гидравлический насос (26) предназначен для приведения в действие второго гидромотора (17) второго ведущего колеса (13),при этом первый гидравлический насос (25) выполнен с возможностью изменения рабочего объема первого гидравлического насоса между минимальной величиной и максимальной величиной для изменения скорости потока рабочей жидкости, используемой для подачи в первый гидромотор (17), когда первый гидравлический насос приводится в действие, а второй гидравлический насос (26) выполнен с возможностью изменения рабочего объема второго гидравлического насоса между минимальной величиной и максимальной величиной для изменения скорости потока рабочей жидкости, используемой для подачи во второй гидромотор, когда второй гидравлический насос приводится в действие,причем первый приводной гидромотор (17) имеет сервомеханизм (17 А) регулирования рабочего объема, при этом трактор содержит блок (17 С) управления, выполненный с возможностью управления сервомеханизмом (17 А) таким образом, что обеспечивает непрерывную бесступенчатую регулировку рабочего объема первого приводного гидромотора (17) между минимальной величиной и максимальной величиной для изменения поступательной скорости первого ведущего колеса (12) относительно скорости потока рабочей жидкости, подаваемой в первый гидромотор,второй приводной гидромотор (17) имеет сервомеханизм (17 В) регулирования рабочего объема, при этом блок (17 С) управления выполнен с возможностью управления сервомеханизмом (17 В) таким образом, что обеспечивает непрерывную бесступенчатую регулировку рабочего объема второго приводного гидромотора между минимальной величиной и максимальной величиной для изменения поступательной скорости второго ведущего колеса (13) относительно скорости потока рабочей жидкости, подаваемой во второй гидромотор,устройство (34) управления скоростью, выполненное с возможностью обеспечения выходного сигнала скорости между положениями переднего хода и заднего хода через нейтральное положение,при этом устройство управления скоростью выполнено с возможностью изменения рабочего объема первого гидравлического насоса (25) и/или первого гидромотора (17) для изменения поступательной скорости первого ведущего колеса (12), причем устройство управления скоростью выполнено с возможностью изменения рабочего объема второго гидравлического насоса (26) и/или второго гидромотора (17) для изменения поступательной скорости второго ведущего колеса (13), а также устройство управления скоростью выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) симметрично для изменения общей поступательной скорости трактора,систему (33, 51) рулевого управления, выполненную с возможностью обеспечения выходного сигнала рулевого управления между левым и правым положениями через среднее положение,причем система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема первого гидравлического насоса (25) и/или первого гидромотора (17) для изменения поступательной скорости первого ведущего колеса (12), при этом система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема второго гидравлического насоса (26) и/или второго гидромотора (17) для изменения поступательной скорости второго ведущего колеса (13), а также система (33, 51) рулевого управления выполнена с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении. 2. Трактор по п.1, в котором система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема первого и второго гидравлических насосов (25, 26) без изменения рабочего объема первого и второго гидромоторов (17). 3. Трактор по п.1, в котором система (33, 51) рулевого управления выполнена с возможностью изменения рабочего объема первого и второго гидромоторов (17) без изменения рабочего объема первого и второго гидравлических насосов (25, 26). 4. Трактор по п.1, в котором система (33, 51) управления скоростью выполнена с возможностью изменения рабочего объема как первого и второго гидравлических насосов (25, 26), так и первого и второго гидромоторов (17). 5. Трактор по любому из пп.1-4, в котором система (33, 51) управления скоростью обеспечивает первый выходной сигнал для управления рабочим объемом первого и второго моторов (17) и второй выходной сигнал для управления рабочим объемом первого и второго насосов (25, 26). 6. Трактор по п.5, в котором один из первого и второго выходных сигналов представляет собой электрический сигнал, вырабатываемый электрическим датчиком, детектирующим перемещение устройства управления скоростью, при этом электрический сигнал подается в систему (34 В) электронного управления. 7. Трактор по п.6, в котором другой из первого и второго выходных сигналов обеспечивается посредством механической связи (34 А). 8. Трактор по п.6, в котором система (34 В) электронного управления включает в себя программу,выполненную таким образом, что регулирование, производимое упомянутым электрическим сигналом,не является прямо пропорциональным положению рычага управления скоростью. 9. Трактор по п.8, в котором регулирование, производимое упомянутым электрическим сигналом,предназначено для управления регулированием первого и второго моторов (17) без изменения рабочего объема первого и второго насосов (25, 26). 10. Трактор по любому из пп.5-9, в котором первый выходной сигнал, вызывающий регулирование первого и второго моторов, является таким, что первый и второй моторы остаются при максимальном рабочем объеме для первой части регулирования устройства управления скоростью. 11. Трактор по любому из пп.5-9, в котором первый выходной сигнал, вызывающий регулирование первого и второго моторов, является таким, что первый и второй моторы достигают только установленного рабочего объема, который меньше, чем максимальный рабочий объем. 12. Трактор по п.11, в котором установленный рабочий объем выбирается оператором. 13. Трактор по п.11, который выполнен с возможностью работы в рабочем режиме и режиме транспортировки, при этом первый выходной сигнал, вызывающий регулирование первого и второго моторов,является таким, что предотвращается достижение максимального рабочего объема первым и вторым моторами (1) только в рабочем режиме, так что первый и второй моторы достигают максимального рабочего объема в режиме транспортировки. 14. Трактор по любому из пп.1-13, в котором замедление скорости движения вперед трактора осуществляется посредством возвращения рычага управления скоростью в нулевое положение, при этом устройство (34) управления скоростью и первый и второй моторы (17) выполнены так, что замедление до остановки осуществляется с первым и вторым моторами при максимальном рабочем объеме. 15. Трактор по любому из пп.1-14, в котором устройство (34) управления скоростью и моторы (17) выполнены так, что соотношение изменения рабочего объема первого и второго моторов относительно первого и второго насосов отличается во время ускорения и во время замедления. 16. Трактор по любому из пп.1-15, в котором устройство (34) управления скоростью и моторы (17) выполнены так, что первый и второй моторы изменяют рабочий объем с такой же скоростью, что первый и второй насосы по меньшей мере для части регулирования устройства управления скоростью во время ускорения. 17. Трактор по любому из пп.1-16, в котором устройство (34) управления скоростью, насосы (25,26) и моторы (17) выполнены так, что во время замедления рабочий объем первого и второго насосов снижается с более быстрой скоростью, чем увеличивается рабочий объем первого и второго моторов. 18. Трактор по любому из пп.1-17, в котором система (33, 51) рулевого управления содержит первое устройство (33) рулевого управления, выполненное с возможностью обеспечения первого выходного сигнала рулевого управления между левым и правым положениями через среднее положение, и второе устройство (51) рулевого управления, независимое от первого устройства рулевого управления и выполненное с возможностью обеспечения второго выходного сигнала рулевого управления между левым и правым положениями через среднее положение,причем первое устройство (33) рулевого управления выполнено с возможностью изменения рабочего объема первого гидравлического насоса (25) без изменения рабочего объема первого гидромотора для изменения поступательной скорости первого ведущего колеса (12),первое устройство (33) рулевого управления выполнено с возможностью изменения рабочего объема второго гидравлического насоса (26) без изменения рабочего объема второго гидромотора для изменения поступательной скорости второго ведущего колеса (13),первое устройство (33) рулевого управления выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении,при этом второе устройство (51) рулевого управления выполнено с возможностью изменения рабочего объема первого гидромотора без изменения рабочего объема первого гидравлического насоса для изменения поступательной скорости первого ведущего колеса (12),второе устройство (51) рулевого управления выполнено с возможностью изменения рабочего объема второго гидромотора без изменения рабочего объема второго гидравлического насоса для изменения поступательной скорости второго ведущего колеса (13),второе устройство (51) рулевого управления выполнено с возможностью изменения поступательной скорости первого и второго ведущих колес (12, 13) дифференцированно, чтобы обеспечить рулевое управление трактора в требуемом направлении,в результате чего осуществляется рулевое управление трактора посредством первого устройства(33) рулевого управления и второго устройства (51) рулевого управления независимо друг от друга. 19. Трактор по п.18, в котором первое устройство (33) рулевого управления выполнено с возможностью ручного управления оператором, а второе устройство (51) рулевого управления выполнено с возможностью управления в ответ на сигнал от автоматической системы рулевого управления.
МПК / Метки
МПК: B60K 17/356, B60K 7/00, B62D 61/00, B60K 17/30
Метки: гидравлическим, трактор, приводом
Код ссылки
<a href="https://eas.patents.su/15-24915-traktor-s-gidravlicheskim-privodom.html" rel="bookmark" title="База патентов Евразийского Союза">Трактор с гидравлическим приводом</a>
Трактор с гидравлическим управлением скоростью и рулевым механизмом для рулевого управления при максимальной скорости
Номер патента: 10279
Опубликовано: 29.08.2008
Автор: Данн Джеймс Томас
МПК: B62D 11/06, A01D 41/127, B60K 17/10...
Метки: скоростью, рулевым, максимальной, скорости, трактор, управления, механизмом, гидравлическим, управлением, рулевого
Формула / Реферат:
1. Трактор, содержащий раму трактора; двигатель, установленный на раме трактора; кабину, установленную на раме трактора; первое и второе ведущие колеса трактора, установленные на ведущем конце трактора, причем первое ведущее колесо включает в себя первый гидравлический приводной двигатель для приведения в движение первого колеса, а второе ведущее колесо включает в себя второй гидравлический приводной двигатель для приведения в движение второго...
Скважинный трактор
Номер патента: 15100
Опубликовано: 30.06.2011
Автор: Макиналли Джеральд
МПК: E21B 23/14, E21B 23/00
Метки: скважинный, трактор
Формула / Реферат:
1. Скважинный трактор (1), содержащий по меньшей мере одно приводное колесо (4, 8, 12), установленное на механизме (6, 10, 14) перемещения, присоединенном к скважинному трактору (1), причем механизм (6, 10, 14) перемещения выполнен с возможностью удерживания приводного колеса (4, 8, 12) в прижатом состоянии к стенке (18) скважины, отличающийся тем, что механизм (6, 10, 14) перемещения выполнен, по меньшей мере, с возможностью поворота или...
Гаечный ключ с регулируемым крутящим моментом и гидравлическим приводом для затягивания или ослабления соединительных деталей и способ затягивания или ослабления соединительных деталей
Номер патента: 13764
Опубликовано: 30.06.2010
Автор: Юнкерс Джон К.
МПК: B25B 21/00, B23P 19/04
Метки: регулируемым, способ, моментом, соединительных, затягивания, деталей, ослабления, гаечный, ключ, приводом, крутящим, гидравлическим
Формула / Реферат:
1. Гаечный ключ с регулируемым крутящим моментом и гидравлическим приводом для затягивания или ослабления соединительной детали, который включает корпус, имеющий две корпусных части, включая цилиндровую часть и приводную часть; цилиндр-поршневые средства, расположенные в вышеуказанной цилиндровой части, которые могут перемещаться вдоль первой оси; храповой механизм, расположенный в вышеуказанной приводной части и соединенный с вышеуказанными...
Трактор с устройством автоматического управления направлением движения
Номер патента: 15995
Опубликовано: 30.01.2012
Авторы: Снайдер Джеффри У., Отто Филип Дж., Данн Джеймс Томас
МПК: B60K 26/00, B62D 1/02
Метки: движения, управления, автоматического, направлением, устройством, трактор
Формула / Реферат:
1. Трактор, содержащийраму трактора;двигатель внутреннего сгорания, установленный на раме трактора;кабину, установленную на раме трактора;первое и второе ведущие колеса трактора, установленные на ведущем конце трактора, при этом первое ведущее колесо содержит первый гидравлический приводной двигатель для привода первого колеса, а второе ведущее колесо содержит второй гидравлический приводной двигатель для привода второго колеса;два ведомых...
Газонокосилочный трактор с косилочным механизмом и каналом для сбрасывания (скошенного материала)
Номер патента: 6821
Опубликовано: 28.04.2006
Автор: Бауер Франк
МПК: A01D 34/64
Метки: сбрасывания, косилочным, материала, каналом, механизмом, скошенного, газонокосилочный, трактор
Формула / Реферат:
1. Газонокосилочный трактор, содержащий косилочный механизм (17), который посредством канала (16) для сбрасывания (скошенного материала) связан с принимающим скошенный материал (22) контейнером (26), и имеющий приводные задние колеса (10), которые опираются на раму (2) шасси трактора, отличающийся тем, что каждое заднее колесо (10) опирается на собственную приводную ось (9), установленную на раме (2) шасси, причем пространство под каналом (16)...
Предыдущий патент: Система демпфирования вибраций прокатной клети с первым и вторым пассивными гидравлическими элементами
Следующий патент: Анод для выделения кислорода
Случайный патент: Способ образования трехмерной микроструктуры на поверхности, его применение, и полученные таким образом микроструктурированные продукты