Система испытания на твердость методом вдавливания
Формула / Реферат
1. Система испытания на твердость методом вдавливания, содержащая
несущую конструкцию с прикрепленной к ней подвижной объективной револьверной головкой, содержащей первый объектив, который является частью микроскопа, и индентор,
подвижную платформу для размещения детали, закрепленную на несущей конструкции,
видеокамеру для съемки изображений детали через микроскоп,
дисплей,
процессор, электрически связанный по меньшей мере с частью из револьверной головки, подвижной платформы, видеокамеры и дисплея;
подсистему памяти, подключенную к процессору и предназначенную для хранения машинной программы, которая при приведении в исполнение побуждает процессор для выполнения следующих операций:
захвата и сохранения последовательности изображений детали в реальном времени, причем изображения в реальном времени предоставлены видеокамерой,
сохранения связанных координат платформы для изображений в реальном времени, причем координаты платформы предоставлены платформой,
отображения комбинированного изображения детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы.
2. Система по п.1, отличающаяся тем, что машинная программа содержит дополнительный этап отображения шаблона закрашивания фона в комбинированном изображении для частей детали, которые не были отсняты.
3. Система испытания на твердость методом вдавливания, содержащая несущую конструкцию с прикрепленной к ней подвижной объективной револьверной головкой, содержащей первый объектив, который является частью микроскопа, и индентор,
подвижную платформу для размещения детали, закрепленную на несущей конструкции,
видеокамеру для съемки изображений детали через микроскоп,
дисплей,
процессор, электрически связанный по меньшей мере с частью из револьверной головки, подвижной платформы, видеокамеры и дисплея,
подсистему памяти, подключенную к процессору и предназначенную для сохранения машинной программы, которая при приведении в исполнение побуждает процессор для выполнения следующих операций:
захвата и сохранения последовательности изображений детали в реальном времени, причем изображения в реальном времени предоставлены видеокамерой,
сохранения связанных координат платформы для изображений в реальном времени, причем координаты платформы предоставлены платформой,
отображения комбинированного изображения детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы, при этом комбинированное изображение содержит шаблон закрашивания фона для частей детали, которые не были отсняты.
4. Система испытания на твердость методом вдавливания, содержащая
несущую конструкцию с прикрепленной к ней подвижной объективной револьверной головкой, содержащей первый объектив, который формирует часть микроскопа, и индентор,
подвижную платформу для размещения детали, закрепленную на несущей конструкции,
видеокамеру для съемки изображений детали через микроскоп,
дисплей,
процессор, электрически связанный по меньшей мере с частью из револьверной головки, подвижной платформы, видеокамеры и дисплея,
подсистему памяти, подключенную к процессору и предназначенную для хранения машинной программы, которая при приведении в исполнение побуждает процессор для выполнения следующих операций:
захвата и сохранения последовательности изображений детали в реальном времени, в котором изображения в реальном времени предоставлены видеокамерой,
сохранения связанных координат платформы для изображений в реальном времени, причем координаты платформы предоставлены платформой,
отображения комбинированного изображения детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы, при этом комбинированное изображение содержит шаблон закрашивания фона для частей детали, которые не были отсняты,
наложения изображения текущего положения детали в комбинированном изображении,
указания местоположения изображения текущего положения.
5. Система по любому из пп.1, 3 или 4, отличающаяся тем, что последовательность изображений в реальном времени сохранена на более низком разрешении, чем отснятые изображения.
6. Система по любому из пп.1, 3 или 4, отличающаяся тем, что машинная программа содержит дополнительный этап нормализации последовательности изображений в реальном времени, когда по меньшей мере одно из изображений в реальном времени было отснято вторым объективом с другим фокусным расстоянием по сравнению с первым объективом, перед отображением комбинированного изображения детали.
7. Система по любому из пп.1, 3 или 4, отличающаяся тем, что машинная программа содержит дополнительный этап отображения внешнего контура детали в комбинированном изображении.
8. Система по п.7, отличающаяся тем, что машинная программа содержит дополнительные этапы
обследования кадра из потока изображений детали для определения местоположения кромки детали,
перемещения детали в направлении, параллельном кромке детали, чтобы кромка детали оставалась в зоне обзора для следующего кадра до тех пор, пока контур детали не завершен.
9. Система по любому из пп.1, 3, отличающаяся тем, что машинная программа содержит дополнительные этапы
наложения изображения текущего положения детали в комбинированном изображении,
указания местоположения изображения текущего положения.
10. Система по любому из пп.1, 3, 4, отличающаяся тем, что машинная программа содержит дополнительные этапы
наложения диаграммы положения вмятины на комбинированное изображение,
отображения предложенного местоположения вмятины с контуром вдавливания, который представляет собой геометрическую форму и размер на основании предполагаемого индентора, предполагаемой ориентации индентора, предполагаемой силы вдавливания индентора и предполагаемой твердости детали.
11. Способ для предоставления комбинированного изображения, заключающийся в том, что
захватывают и сохраняют последовательность изображений детали в реальном времени, причем изображения в реальном времени предоставлены видеокамерой,
сохраняют связанные координаты платформы для последовательности изображений в реальном времени, причем координаты платформы предоставлены платформой, а деталь закреплена на платформе,
отображают комбинированное изображение детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы,
накладывают изображение текущего положения детали в комбинированном изображении,
указывают местоположение изображения текущего положения.
12. Способ по п.11, отличающийся тем, что дополнительно отображают множество допускающих манипуляции местоположений вмятин на комбинированном изображении.

Текст
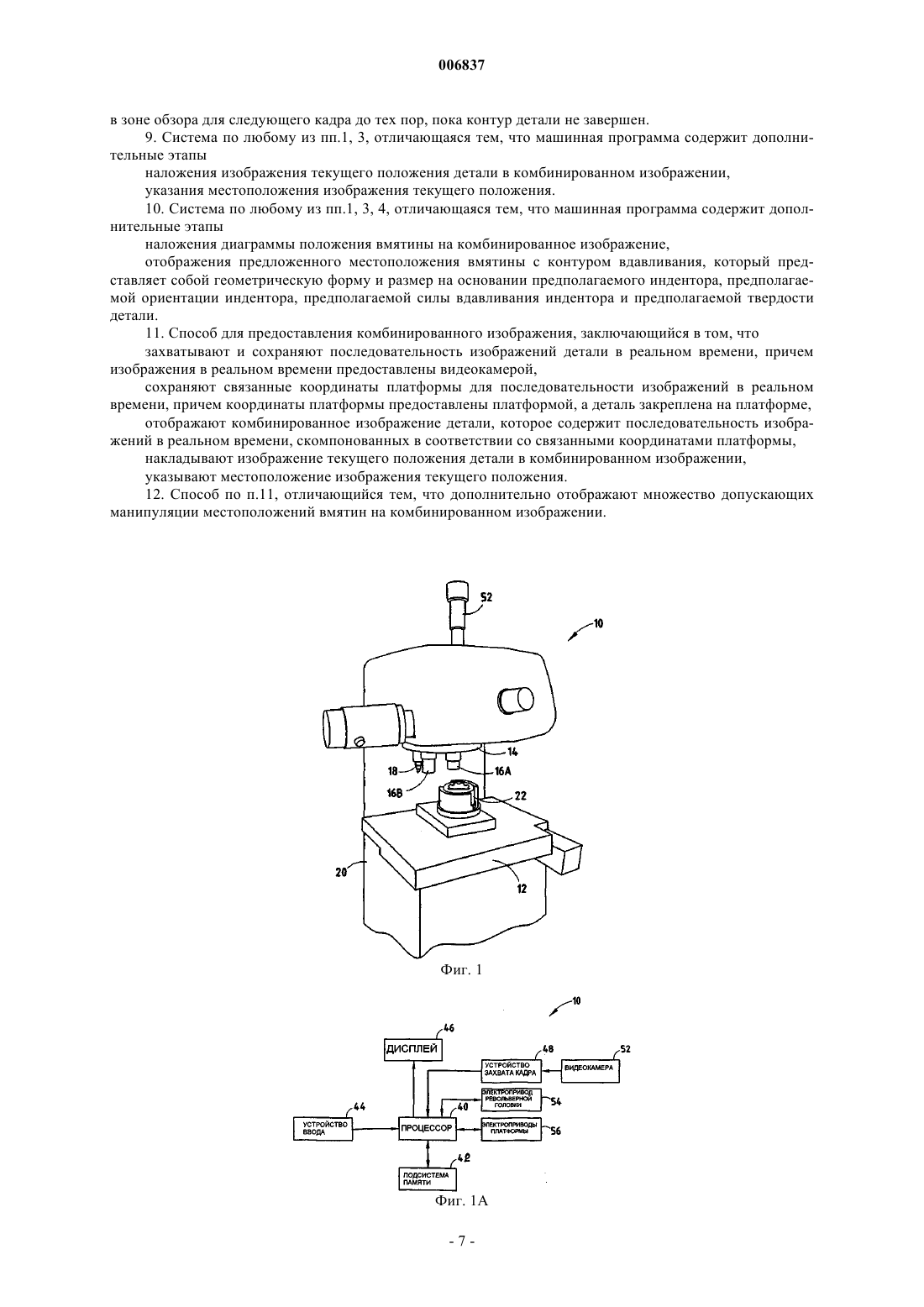
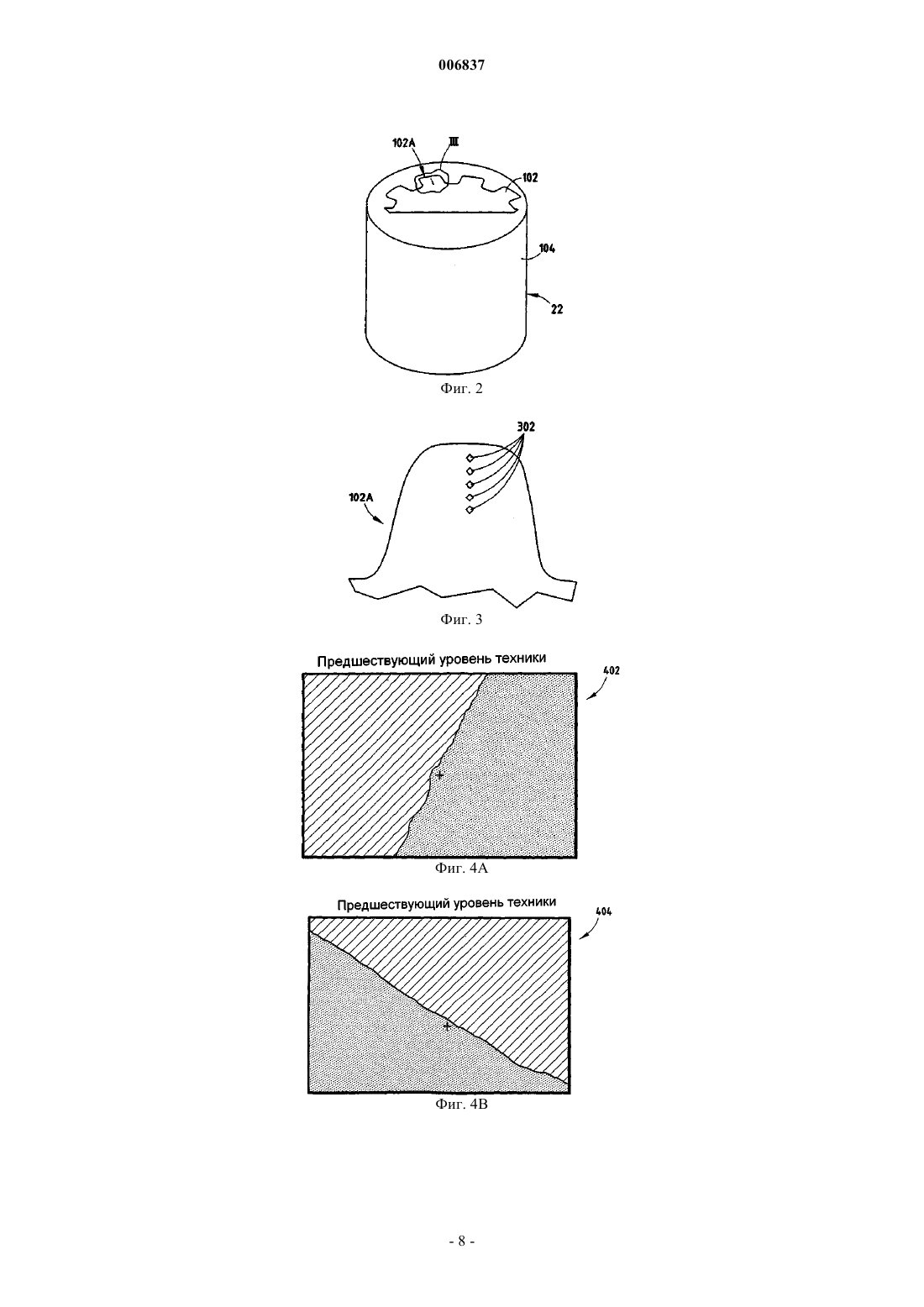
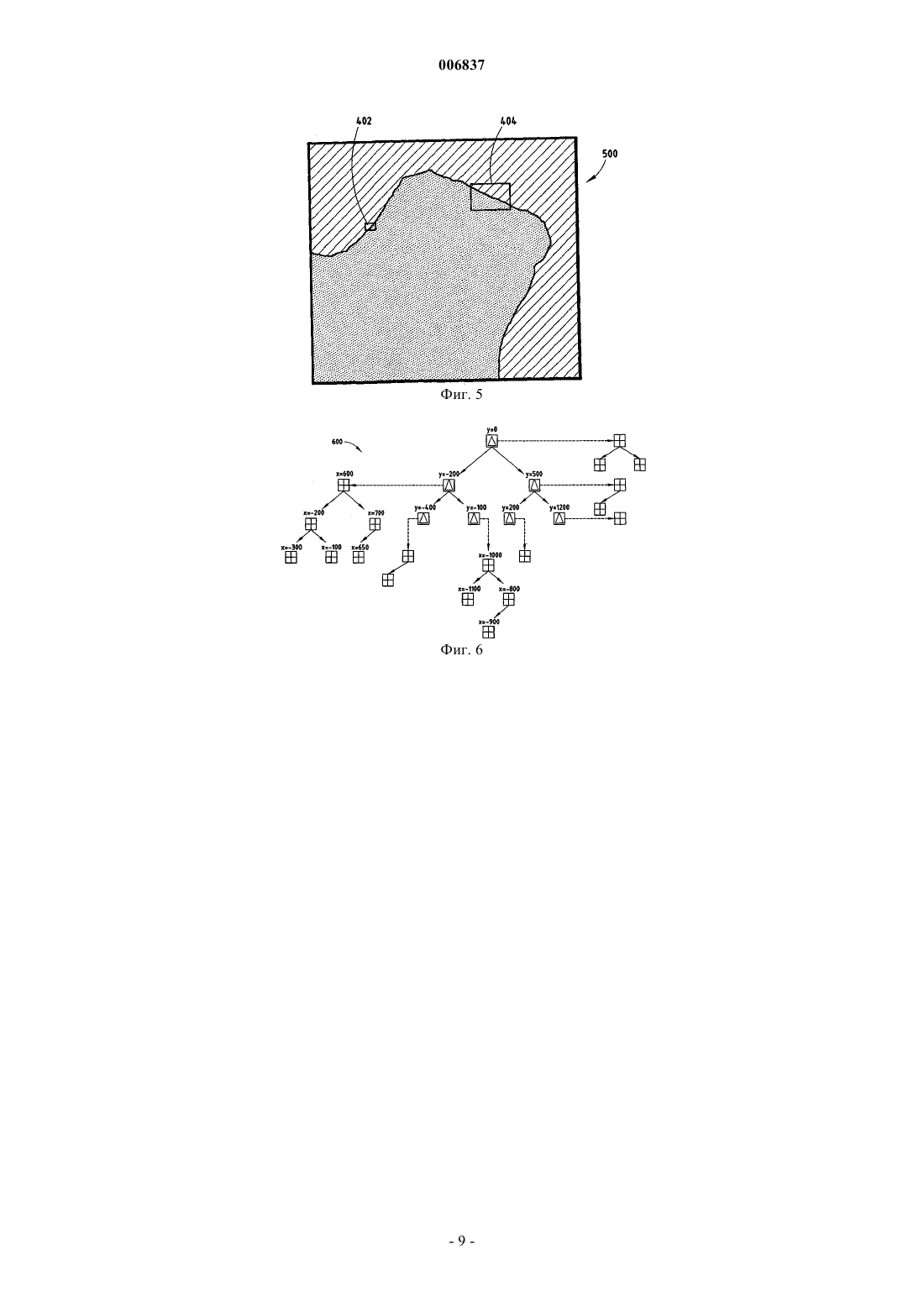
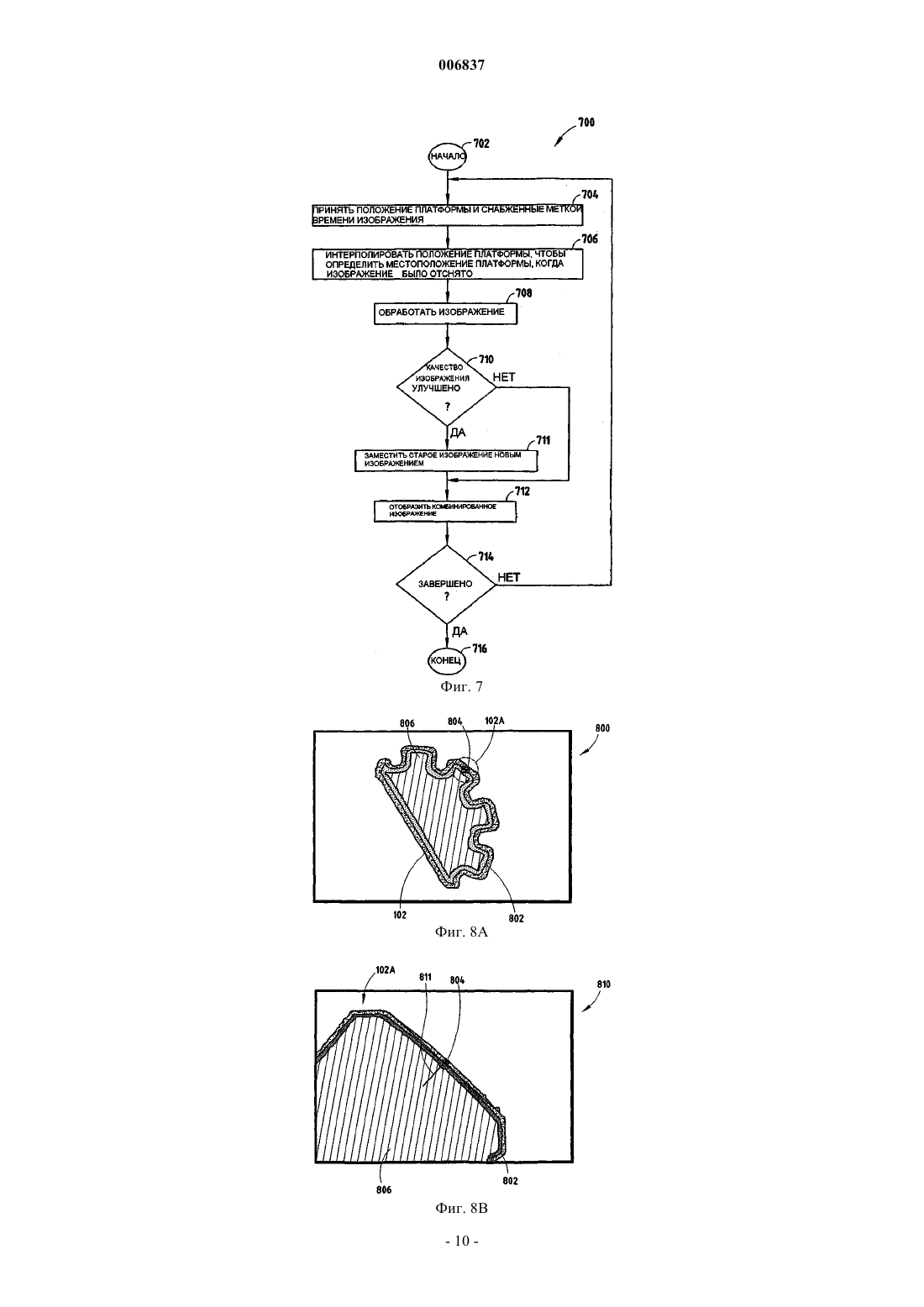
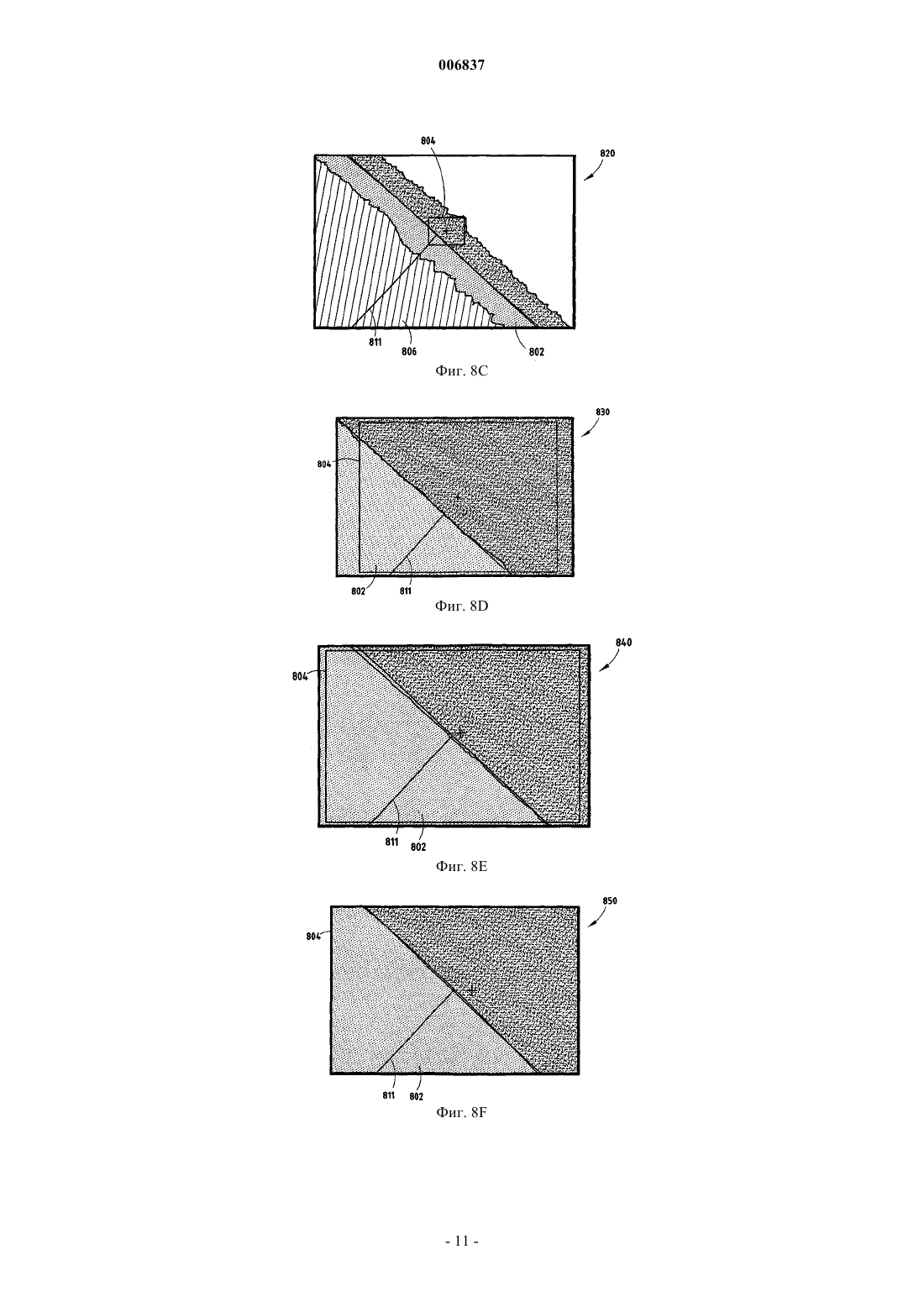
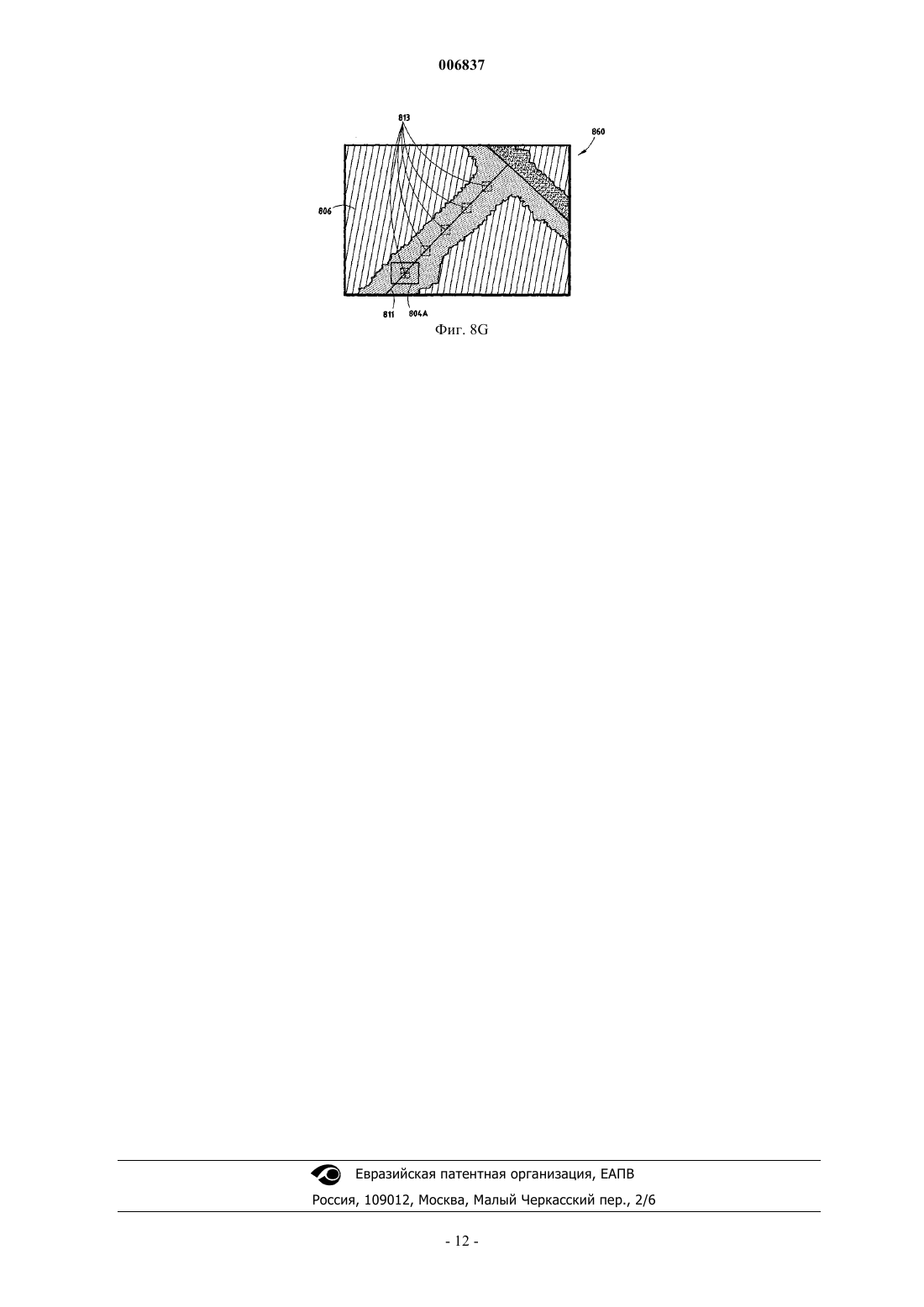
006837 Область техники Настоящее изобретение относится к испытательной системе и, более точно, к системе испытания на твердость методом вдавливания. Предшествующий уровень техники Испытание на твердость было основано для определения оценки материала и контроля качества процесса обработки и проектно-конструкторских разработок. Твердость изделия, эмпирическая по природе, может быть соотнесена с прочностью на растяжение многих металлов и служит показателем износостойкости и ковкости. В известном устройстве для испытания на твердость методом вдавливания используется калиброванный механизм для вдавливания алмазного индентора (требуемой геометрической формы) в поверхность оцениваемого материала. Размер (размеры) вдавливания затем измеряют с помощью оптического микроскопа после снятия усилия вдавливания. Определение твердости испытываемого материала может затем быть получено делением силы, приложенной к индентору, на площадь проецируемой поверхности остаточного оттиска, сделанной индентором. В типичной ситуации, от оператора устройства для испытания на твердость методом вдавливания требуется выполнить позиционирование вмятины по детали на точных расстояниях от топологических элементов детали. От оператора может потребоваться разместить последовательность из пяти расположенных с равномерными промежутками вмятин 302 по поверхности зуба 102 А (фиг. 2, 3), например, испытываемой шестерни 102, установленной в оправку 104 из пластмассы для формирования испытательной сборки 22. Вмятины 302 могут быть разнесены на 200 мкм (5 мкм) друг от друга и сцентрированы на торце зуба 102 А. При условии, что зуб 102 А имеет приблизительно 0,5 см в ширину и 0,5 см в высоту,а устройство для испытания имеет две кратности увеличения, то есть объектив высокого 50-кратного оптического увеличения с шириной зоны обзора в 200 мкм и 5-кратного увеличения с зоной обзора в 2000 мкм, и при условии, что изображение зуба 102 А отображено на отображающем устройстве, имеющем горизонтальный размер в 640 пикселей, горизонтальный размер пикселя соответствует около 0,3 мкм при 50-кратном и около 3,0 мкм при 5-кратном увеличении. В таком устройстве для испытания 5-кратное увеличение позволяет оператору видеть только около 1/5 верхушки зуба, а 50-кратное увеличение позволяет оператору видеть только 1/50 верхушки зуба. Должно быть принято во внимание, что такой обзор не позволяет оператору точно знать, что платформа,которая использована для позиционирования испытательной сборки 22, позиционирована по центру поверхности верхушки зуба. Таким образом, чтобы гарантировать, что вдавливания перпендикулярны верхушке зуба 102 А, а также гарантировать заданное расстояние от поверхности верхушки зуба 102 А,обычные пакеты программного обеспечения дают возможность оператору позиционировать Т-образную масштабную шкалу вдоль отображаемого изображения. В этом способе оператору следует позиционировать верхнюю часть Т-образной масштабной шкалы по кромке верхушки зуба 102 А посредством сочетания перемещения платформы и поворота Т-образной масштабной шкалы. Как коротко описано выше,при 5-кратном увеличении оператор имеет относительно хорошее представление о требуемой ориентации Т-образной масштабной шкалы, но недостаточное разрешение, чтобы позиционировать ее в пределах 5 мкм от кромки. При 50-кратном увеличении расположение кромки верхушки в пределах 5 мкм возможно, но ориентация затруднена, поскольку кромка не является прямой при таком увеличении. Технической задачей настоящего изобретения является создание устройства для испытания твердости, которое предоставит возможность оператору устройства для испытания твердости методом вдавливания легче и проще позиционировать индентор относительно испытательной сборки. Краткое изложение существа изобретения Поставленная задача решена, согласно настоящему изобретению, путем создания системы для испытания на твердость методом вдавливания, которая содержит несущую конструкцию, имеющую подвижную револьверную головку, подвижную платформу для размещения детали, видеокамеру, отображающее устройство, процессор и подсистему памяти. Револьверная головка содержит первый объектив микроскопа и индентор, а подвижная платформа предназначена для размещения детали, которая должна быть испытана. Видеокамера снимает через микроскоп изображение детали, которое может затем быть предоставлено на отображающем устройстве. Процессор электрически связан с револьверной головкой,подвижной платформой, видеокамерой и отображающим устройством, а также с подсистемой памяти. Подсистема памяти хранит машинную программу, которая при приведении в исполнение побуждает процессор выполнять ряд шагов. То есть машинная программа побуждает процессор получать и сохранять последовательность изображений детали в реальном времени, используя видеокамеру. Машинная программа также побуждает процессор сохранять координаты платформы, связанные с каждым из изображений, и отображать комбинированное изображение детали, которое включает в себя последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы, на устройстве отображения. В соответствии с еще одним вариантом осуществления изобретения, изображения сохраняются на более низком разрешении, чем снимаемые изображения. В соответствии с еще одним вариантом осуществления изобретения, машинная программа побуждает процессор выполнять дополнительный этап по отображению шаблона заднего фона в комбинированном изображении для частей детали, которые не-1 006837 были отсняты. В соответствии с еще одним вариантом осуществления изобретения, машинная программа побуждает процессор выполнять дополнительный этап по нормализации последовательности изображений в реальном времени, когда по меньшей мере одно из изображений было отснято вторым объективом с другим фокусным расстоянием по сравнению с первым объективом, перед отображением комбинированного изображения детали. В еще одном варианте осуществления машинная программа побуждает процессор выполнять дополнительный этап по отображению внешнего контура детали в комбинированном изображении. Этап отображения внешнего контура детали в комбинированном изображении может также включать в себя этапы: обследования кадра из потока изображений детали, чтобы определить местоположение кромки детали, и перемещение детали в направлении, параллельном кромке, с тем, чтобы кромка оставалась в зоне обзора для следующего кадра до тех пор, пока контур детали не завершен. Машинная программа может также побудить процессор на выполнение дополнительных этапов по наложению изображения текущей позиции детали в комбинированном изображении и указанию местоположения позиционируемого в настоящий момент изображения. Более того, машинная программа может позволять процессору выполнять дополнительные этапы по наложению диаграммы расположения вмятины на комбинированное изображение и отображению предлагаемого местоположения вмятины в пределах внешнего контура вдавливания, который определяет геометрическую форму и размер (основанные на предполагаемом инденторе), предполагаемую ориентацию индентора, предполагаемую силу вдавливания индентора и предполагаемую твердость детали. Краткое описание чертежей В дальнейшем преимущества и цели настоящего изобретения дополнительно поясняются описанием предпочтительного варианта воплощения со ссылками на прилагаемые чертежи, на которых фиг. 1 изображает общий вид системы испытания на твердость методом вдавливания, согласно изобретению; фиг. 1 А - блок-схему системы испытания на твердость методом вдавливания, согласно изобретению; фиг. 2 - общий вид испытательной сборки, которая содержит часть шестерни, вставленной в оправку из пластмассы, согласно изобретению; фиг. 3 - увеличенную горизонтальную проекцию вида сверху зуба шестерни и позиции вмятин на зубе, согласно изобретению; фиг. 4 А - вид части зуба шестерни при 50-кратном увеличении, отображенный на известном мониторе системы испытания на твердость методом вдавливания; фиг. 4 В - вид другой части зуба шестерни при 5-кратном увеличении, отображенный на известном мониторе системы испытания на твердость методом вдавливания; фиг. 5 - вид комбинированного изображения, содержащий области 50-кратного и 5-кратного увеличения, соответственно, отображенный на мониторе системы испытания на твердость методом вдавливания, согласно изобретению; фиг. 6 - диаграмму структуры данных, используемую для определения местоположения отдельных изображений в комбинированном изображении детали, согласно изобретению; фиг. 7 - схему последовательности операций при создании комбинированного изображения детали,согласно изобретению; фиг. 8 А-8G - варианты отображений, предусмотренных системой испытания на твердость методом вдавливания, согласно изобретению. Подробное описание предпочтительных вариантов осуществления изобретения Система согласно различным вариантам осуществления настоящего изобретения представляет собой систему испытания на твердость методом вдавливания, содержащую оптический микроскоп, цифровую видеокамеру, предназначенную для съемки изображения посредством микроскопа, электрически управляемую платформу, допускающую перемещение испытательной сборки, то есть связанной детали,которая должна быть испытана, или части детали, установленной в пластмассовую оправку по меньшей мере при двух разрешениях, на плоскости, перпендикулярной объективу оптического микроскопа, и процессор (или компьютерную систему), подключенный к видеокамере и к платформе, для отображения изображений процессором, полученных видеокамерой при контроле и управлении перемещения платформы и ассоциативно связанной детали. Общий вид системы для испытания на твердость методом вдавливания в соответствии с одним из вариантов осуществления настоящего изобретения представлен на фиг. 1. Система 10 испытания на твердость методом вдавливания содержит несущую конструкцию 20 с прикрепленной к ней и снабженной электроприводом объективной револьверной головкой 14, содержащей объективы 16 А и 16 В, которые являются частью оптического микроскопа, и индентор 18, например индентор Кнупа или Векерса. Дополнительные объективы могут быть установлены в револьверной головке 14, по требованию. Платформа 12 закреплена с возможностью перемещения на несущей конструкции 20, чтобы могли быть проверены разные зоны испытательной сборки 22, которая прикреплена к платформе 12. На фиг. 1 А представлена электрическая блок-схема системы 10 испытания на твердость. Процессор-2 006837 40 присоединен к подсистеме 42 памяти, устройству 44 ввода (например, джойстику, кнопкам, мыши и/или клавиатуре) и дисплею 46. Устройство 48 захвата изображения, подключенное между процессором 40 и видеокамерой 52, предназначено для захвата кадров цифровых данных, предоставляемых видеокамерой 52. Видеокамера 52 может, например, предоставлять видеосигнал RS-170 (формата удаленного видеотерминала) устройству 48 захвата изображения, который предоставлен в цифровом виде с частотой 30 Гц. Процессор 40 также управляет электроприводом 54 револьверной головки, чтобы по требованию правильно и избирательно позиционировать объективы 16 А и 16 В, и индентор (например, устройство с алмазным наконечником). Следует учесть, что, если требуется, дополнительные инденторы могут также быть расположены на револьверной головке 14. Процессор 40 также подключен к электроприводам 56 платформы (например, трем электроприводам, которые перемещают платформу в трех измерениях) и выдает команды электроприводам 56 платформы для перемещения платформы в двух или трех направлениях для съемки и фокусирования изображения, по требованию. Электроприводы 56 платформы также предоставляют координаты положения платформы, которые, как указано ниже, сопоставляются с изображениями, предоставленными видеокамерой 52. Координаты положения платформы могут быть предоставлены посредством, например, кодирующего устройства, связанного с каждым электроприводом 56 платформы, и могут быть переданы процессору 40 с частотой 30 Гц через интерфейс RS-232 (стандартный интерфейс последовательной передачи данных). В качестве альтернативы, процессор 40 может обмениваться данными с отдельным контроллером платформы, который содержит свое устройство ввода,например джойстик. Процессор 40, подсистема 42 памяти, устройство 44 ввода и дисплей 46 могут быть объединены в пределах персонального компьютера (PC). В этом случае устройство 48 захвата изображения имеет вид платы, которая вставляется в объединительную плату, связанную с процессором 40. В настоящем описании термин процессор может включать в себя процессор общего назначения, микроконтроллер (например, операционный блок с памятью, и т.д., объединенные в одной интегральной схеме),специализированную интегральную схему (ASIC), программируемое логическое устройство или цифровой сигнальный процессор (ЦСП). Испытательная сборка 22 (фиг. 2) содержит деталь, которая должна быть испытана, например, часть шестерни 102, которая установлена в оправку из материала 104, например, фенолоальдегидного полимера, для проведения испытания. Зуб 102 А (фиг. 3) шестерни 102 может иметь торец с размерами около 0,5 см на 0,5 см, в котором вдавливания должны быть размещены согласно требуемому шаблону вдавливания. На фиг. 3 изображены пять размещенных с равномерными интервалами вмятин 302. В типичной ситуации, деталь, которая должна быть испытана на твердость методом вдавливания, часто измеряется в сантиметрах, тогда как размеры вдавливаний колеблются от 10 до 100 мкм. Зона обзора для оптического микроскопа может колебаться в пределах от 100 до 5000 мкм. Как указано выше, известное устройство(фиг. 4 А и 4 В) для испытания на твердость методом вдавливания с 5-кратным и 50-кратными объективами позволяют оператору системы видеть около 1/5 части верхушки типичного зуба при 5-кратном увеличении и только около 1/50 поверхности верхушки зуба при 50-кратном увеличении. Часто оператору трудно определить, позиционирована ли платформа по центру поверхности верхушки зуба, когда задано 50-кратное увеличение. В соответствии с настоящим изобретением, комбинированное изображение 500(фиг. 5) предоставляет более широкую зону обзора, чтобы предоставить оператору возможность точно определять, где вмятины должны быть позиционированы на зубе. В соответствии с одним из вариантов осуществления настоящего изобретения, процессор 40 собирает последовательность изображений в реальном времени и координаты платформы, в то время как оператор вручную перемещает деталь. В этом случае процессор 40 обеспечивает последовательность операций, т.е. компонует данные, то есть воспроизводит комбинированное (или панорамное) изображение,которое показывает части детали, прошедшие под объективом микроскопа, причем объектив закреплен на револьверной головке системы испытания. Независимо от предоставляемой кратности увеличения изображения, комбинированное изображение может быть сохранено с более низким разрешением, например приблизительно 5 мкм на пиксель, если ограничения памяти существенны. На фиг. 6 представлена диаграмма 600 структуры данных, которая применяется, чтобы связать данные с комбинированным изображением. Механизм хранения основан на древовидной схеме. Чтобы сопоставлять изображения, полученные от видеокамеры 52, процессор 40 сохраняет изображения в снабженной метками времени очереди изображений, например буфере типа первым вошел первым вышел(FIFO), а позиции платформы записаны в снабженной метками времени очереди позиций, например, еще одном буфере типа первым вошел - первым вышел (FIFO), расположенных в подсистеме 46 памяти. Для каждого заданного изображения в очереди реализована процедура, которая отыскивает позицию платформы и информацию о скорости за период около момента времени, когда изображение было получено. Затем, используя интерполяцию, процессор 40 точно определяет, где находилась платформа 12, когда было получено изображение. Эта технология предоставляет возможность точного позиционирования данного изображения в комбинированном изображении. Кроме того, так как направление и скорость перемещения детали известны, когда одно из изображений отснято, то могут быть применены технология быстрого преобразования Фурье (БПФ) или другие технологии обработки изображения, чтобы устранить размытость изображения.-3 006837 На фиг. 7 представлена последовательность операций 700, при которой осуществляется запись качества данных данного изображения, основываясь на выбранном объективе 16 А и 16 В и скорости платформы 12. Таким образом данные нового изображения замещают данные старого изображения, когда оператор повторно отслеживает часть детали, только если вычисленное качество не является значительно худшим. На этапе 702 начинается процесс, где осуществляется контроль позиции. На этапе 704 процессор 40 принимает данные о позиции платформы от электроприводов 56 платформы и снабженные метками времени изображения от видеокамеры 52 посредством устройства 48 захвата изображения. На этапе 706 процессор 40 интерполирует позиции платформы, чтобы определить местоположение платформы, когда изображение было снято. Полученные изображения затем обрабатываются на этапе 708 с использованием различных технологий, например, осуществляют устранение чередования строк, устранение размытости изображения, коррекцию тени и растяжение/сжатие. После обработки изображения на этапе 710 принятия решения процессор 40 определяет, было ли качество (которое определено, например,скоростью платформы и объективом) конкретного изображения улучшено. Если качество изображения улучшено, управление переходит на этап 711, где старое изображение замещается новым изображением. Если не улучшено, управление переходит с этапа 710 на этап 712, где процессор 40 сохраняет старое изображение и использует его при отображении комбинированного изображения на дисплее 46. Комбинированное изображение, созданное в соответствии с настоящим изобретением, хорошо подходит для высокоскоростной модификации и возвращения в прежнее состояние при использовании минимального объема памяти вычислительной машины по сравнению с объемом памяти, требуемым для одного изображения большого размера. Это достигнуто посредством сохранения комбинированного изображения в последовательности дискретных упорядоченных по размеру двухмерных элементов мозаичного изображения, организованных в двоичное дерево по позициям платформы (фиг. 6). На этапе 714 принятия решения процессор 40 определяет, завершил ли оператор последовательность операций по сбору изображения. Если так, то управление переходит на этап 716, где процедура 700 заканчивается. В противном случае управление переходит вновь на этап 704, где процессор 40 продолжает принимать и сохранять позиции платформы и снабженные меткой времени изображения. В соответствии с одним из вариантов осуществления настоящего изобретения, части детали, которые не были проанализированы, помечены контрастным цветом или формой, например легко затененным монохромным цветом, позицией объектива, то есть текущим активным видом, встроенным в комбинированное изображение и позиционированным по его текущей позиции на детали. Активный вид может быть показан, например, обведенным тонкой линией прямоугольником, наложенным на комбинированное изображение. В соответствии с еще одним вариантом осуществления настоящего изобретения, для того чтобы ускорить съемку изображения детали, предусмотрена процедура, которая предоставляет возможность автоматического прохождения контура всей детали во время последовательности операций съемки изображения. В соответствии с настоящим изобретением, в то время как оператор увеличивает любую часть комбинированного изображения, платформа автоматически перемещается в то местоположение, при этом текущее изображение встраивается в комбинированное изображение. В одном из вариантов осуществления изобретения, когда объектив установлен на 50-кратное увеличение, разрешение текущего вида внутри обведенного тонкой линией прямоугольника составляет около 0,3 мкм на пиксель, а вне обведенного тонкой линией прямоугольника составляет около 5 мкм на пиксель. Как указано выше, система может быть преимущественно сконфигурирована так, что оператор может вручную перемещать платформу при помощи джойстика или другого устройства ввода. Когда система настроена так, что стандартная программа управляет перемещением платформы, перемещение платформы может быть указано различными способами. Например, активный вид может быть зафиксирован, предоставляя возможность детали перемещаться за объектив или, альтернативно, комбинированное изображение может быть зафиксировано, а местоположение текущего вида может перемещаться. Как указано выше, известные системы испытания на твердость методом вдавливания давали возможность оператору позиционировать Т-образную масштабную шкалу по поверхности детали, которая должна быть испытана, чтобы гарантировать, что вмятины перпендикулярны поверхности верхушки зуба шестерни и расположены на заданном расстоянии по поверхности верхушки. Однако при 5-кратном увеличении оператор имеет относительно хорошее представление о требуемой ориентации Т-образной масштабной шкалы, но недостаточное разрешение для позиционирования ее в пределах 5 мкм от кромки. Кроме того, при 50-кратном увеличении расположение кромки в пределах 5 мкм возможно, но ориентация Т-образной масштабной шкалы затруднена, поскольку кромка не является прямой при этой кратности увеличения. Одним из решений этой проблемы является осуществление поворота Т-образной масштабной шкалы при 5-кратном увеличении и позиционирование ее по кромке при 50-кратном увеличении. Еще одно решение, которое дает более точный угол поворота, заключается в предоставлении Тобразной масштабной шкале возможности быть больше, чем зона обзора для любого объектива, и использует комбинированное изображение, чтобы точно позиционировать Т-образную масштабную шкалу. Это предоставляет оператору возможность увеличивать любое место детали, и активный вид такой части детали может быть предоставлен с требуемым разрешением.-4 006837 Известные системы испытания на твердость методом вдавливания отображали шаблон требуемых вмятин в отдельном окне. В этих системах оператор управлял местоположениями вмятины в окне шаблона и затем давал системе команду сделать вмятины на детали. Однако оператору трудно сопоставить предполагаемые местоположения вмятины в окне шаблона с точным положением на детали, которое видно на текущем виде. Преимущественно, изобретение обеспечивает возможность наложения окна шаблона сверху на комбинированное изображение. Таким образом, оператор может позиционировать вмятины, принимая во внимание возможности крупного масштаба детали и принимая во внимание комбинированное изображение с низким разрешением. В этом случае оператор может точно подрегулировать местоположения вмятины посредством увеличения просмотра позиций вмятины посредством встроенного текущего вида. Кроме того, в системе, сконфигурированной таким образом, область экрана дисплея сохраняется, как только одно из окон затребовано. То есть многочисленные окна, каждое из которых показывает различные уровни иерархии данных, не требуются, так как комбинированное изображение детали может быть показано в одном окне в системе испытания на твердость, сконфигурированной в соответствии с настоящим изобретением. Однако следует учесть, что система испытания на твердость, сконфигурированная в соответствии с настоящим изобретением, может реализовывать многочисленные окна, каждое из которых показывает комбинированное изображение и является отдельно значимым, масштабируемым и панорамируемым, если это требуется. В соответствии с одним из вариантов осуществления, настоящее изобретение обеспечивает возможность замещения известной Т-образной масштабной шкалы на усовершенствованное аналогичное Т-очертание, верхняя часть которого удлинена и может легко быть совмещена с деталью, а основание состоит из предлагаемых местоположений вмятин. Однако такие очертания, как например, отрезок или окружность известного радиуса, отличные от Т-очертания, могут быть использованы в зависимости от применения. На фиг. 8 А представлено изображение 800 комбинированного изображения шестерни 102 после очерчивания, то есть съемки изображений, кромки 802 шестерни 102. Изображение 800 включает в себя встроенное изображение 804 в реальном времени и часть шестерни 102, которая еще не была отснята и отмечена шаблоном 806 закрашенного фона. На фиг. 8 В представлено изображение 810, которое изображает увеличенный вид зуба 102 А и которое включает в себя встроенное изображение 804 в реальном времени и Т-очертание 811, которое используется для облегчения размещения местоположений вмятины,в соответствии с настоящим изобретением. На фиг. 8 С представлено изображение 820, которое является дополнительно увеличенным видом комбинированного изображения зуба 102 А, представленного на изображении 810, и которое также включает в себя изображение 804 в реальном времени и участок Точертания 811, который использован для позиционирования местоположений вмятины. На фиг. 8D-8F представлены изображения 830, 840 и 850, соответственно, иллюстрирующие выравнивание Т-очертания по зубу 102 А, чтобы содействовать размещению местоположений вмятины. На фиг. 8G представлено изображение 860, которое иллюстрирует предлагаемые местоположения 813 вмятин, наложенные на комбинированное изображение, и текущее изображение 804 А в реальном времени. Варианты осуществления настоящего изобретения позволяют манипулировать местоположениям 813 вмятины. То есть местоположения 813 вмятины могут быть добавлены или удалены, перемещены на новое местоположение и/или повернуты/перенесены в качестве группы, используя подходящее устройство ввода, то есть мышь,клавиатуру и т.д. Следовательно, технологии, указанные выше, позволяют оператору системы испытания на твердость методом вдавливания легко позиционировать местоположения вмятины на детали, которая должна быть испытана на твердость. Вышеприведенное описание рассмотрено только как описание предпочтительных вариантов осуществления. Варианты осуществления, показанные на чертежах и описанные выше, предназначены только для иллюстративных целей. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система испытания на твердость методом вдавливания, содержащая несущую конструкцию с прикрепленной к ней подвижной объективной револьверной головкой, содержащей первый объектив, который является частью микроскопа, и индентор,подвижную платформу для размещения детали, закрепленную на несущей конструкции,видеокамеру для съемки изображений детали через микроскоп,дисплей,процессор, электрически связанный по меньшей мере с частью из револьверной головки, подвижной платформы, видеокамеры и дисплея; подсистему памяти, подключенную к процессору и предназначенную для хранения машинной программы, которая при приведении в исполнение побуждает процессор для выполнения следующих операций: захвата и сохранения последовательности изображений детали в реальном времени, причем изо-5 006837 бражения в реальном времени предоставлены видеокамерой,сохранения связанных координат платформы для изображений в реальном времени, причем координаты платформы предоставлены платформой,отображения комбинированного изображения детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы. 2. Система по п.1, отличающаяся тем, что машинная программа содержит дополнительный этап отображения шаблона закрашивания фона в комбинированном изображении для частей детали, которые не были отсняты. 3. Система испытания на твердость методом вдавливания, содержащая несущую конструкцию с прикрепленной к ней подвижной объективной револьверной головкой, содержащей первый объектив,который является частью микроскопа, и индентор,подвижную платформу для размещения детали, закрепленную на несущей конструкции,видеокамеру для съемки изображений детали через микроскоп,дисплей,процессор, электрически связанный по меньшей мере с частью из револьверной головки, подвижной платформы, видеокамеры и дисплея,подсистему памяти, подключенную к процессору и предназначенную для сохранения машинной программы, которая при приведении в исполнение побуждает процессор для выполнения следующих операций: захвата и сохранения последовательности изображений детали в реальном времени, причем изображения в реальном времени предоставлены видеокамерой,сохранения связанных координат платформы для изображений в реальном времени, причем координаты платформы предоставлены платформой,отображения комбинированного изображения детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы, при этом комбинированное изображение содержит шаблон закрашивания фона для частей детали,которые не были отсняты. 4. Система испытания на твердость методом вдавливания, содержащая несущую конструкцию с прикрепленной к ней подвижной объективной револьверной головкой, содержащей первый объектив, который формирует часть микроскопа, и индентор,подвижную платформу для размещения детали, закрепленную на несущей конструкции,видеокамеру для съемки изображений детали через микроскоп,дисплей,процессор, электрически связанный по меньшей мере с частью из револьверной головки, подвижной платформы, видеокамеры и дисплея,подсистему памяти, подключенную к процессору и предназначенную для хранения машинной программы, которая при приведении в исполнение побуждает процессор для выполнения следующих операций: захвата и сохранения последовательности изображений детали в реальном времени, в котором изображения в реальном времени предоставлены видеокамерой,сохранения связанных координат платформы для изображений в реальном времени, причем координаты платформы предоставлены платформой,отображения комбинированного изображения детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы, при этом комбинированное изображение содержит шаблон закрашивания фона для частей детали,которые не были отсняты,наложения изображения текущего положения детали в комбинированном изображении,указания местоположения изображения текущего положения. 5. Система по любому из пп.1, 3 или 4, отличающаяся тем, что последовательность изображений в реальном времени сохранена на более низком разрешении, чем отснятые изображения. 6. Система по любому из пп.1, 3 или 4, отличающаяся тем, что машинная программа содержит дополнительный этап нормализации последовательности изображений в реальном времени, когда по меньшей мере одно из изображений в реальном времени было отснято вторым объективом с другим фокусным расстоянием по сравнению с первым объективом, перед отображением комбинированного изображения детали. 7. Система по любому из пп.1, 3 или 4, отличающаяся тем, что машинная программа содержит дополнительный этап отображения внешнего контура детали в комбинированном изображении. 8. Система по п.7, отличающаяся тем, что машинная программа содержит дополнительные этапы обследования кадра из потока изображений детали для определения местоположения кромки детали,перемещения детали в направлении, параллельном кромке детали, чтобы кромка детали оставалась-6 006837 в зоне обзора для следующего кадра до тех пор, пока контур детали не завершен. 9. Система по любому из пп.1, 3, отличающаяся тем, что машинная программа содержит дополнительные этапы наложения изображения текущего положения детали в комбинированном изображении,указания местоположения изображения текущего положения. 10. Система по любому из пп.1, 3, 4, отличающаяся тем, что машинная программа содержит дополнительные этапы наложения диаграммы положения вмятины на комбинированное изображение,отображения предложенного местоположения вмятины с контуром вдавливания, который представляет собой геометрическую форму и размер на основании предполагаемого индентора, предполагаемой ориентации индентора, предполагаемой силы вдавливания индентора и предполагаемой твердости детали. 11. Способ для предоставления комбинированного изображения, заключающийся в том, что захватывают и сохраняют последовательность изображений детали в реальном времени, причем изображения в реальном времени предоставлены видеокамерой,сохраняют связанные координаты платформы для последовательности изображений в реальном времени, причем координаты платформы предоставлены платформой, а деталь закреплена на платформе,отображают комбинированное изображение детали, которое содержит последовательность изображений в реальном времени, скомпонованных в соответствии со связанными координатами платформы,накладывают изображение текущего положения детали в комбинированном изображении,указывают местоположение изображения текущего положения. 12. Способ по п.11, отличающийся тем, что дополнительно отображают множество допускающих манипуляции местоположений вмятин на комбинированном изображении.
МПК / Метки
МПК: G06K 9/00
Метки: вдавливания, испытания, методоm, твердость, система
Код ссылки
<a href="https://eas.patents.su/13-6837-sistema-ispytaniya-na-tverdost-metodom-vdavlivaniya.html" rel="bookmark" title="База патентов Евразийского Союза">Система испытания на твердость методом вдавливания</a>
Многослойная пленка для нанесения защитной информации методом горячего тиснения и способ ее изготовления
Номер патента: 6753
Опубликовано: 28.04.2006
Авторы: Вихарев Сергей Александрович, Шарашкин Сергей Николаевич, Павлов Алексей Викторович
МПК: B42D 15/00, B32B 27/30
Метки: тиснения, горячего, пленка, многослойная, способ, защитной, изготовления, информации, нанесения, методоm
Формула / Реферат:
1. Многослойная пленка для нанесения защитной информации на объект методом горячего тиснения, состоящая из базовой пленки-основы с антиадгезионным покрытием, информационного слоя, который нанесен со стороны антиадгезионного покрытия, и термоактивируемого клеевого слоя, при этом информационный слой представляет собой слой из изотропного прозрачного термостойкого полимера, имеющего степень кристалличности не менее 30%, в котором сформировано...
Способ и устройство для испытания стыка, образованного соединением двух труб
Номер патента: 1130
Опубликовано: 30.10.2000
Авторы: Холлингсворт Джимми Лоренс, Питрас Бернд-Георг
МПК: G01N 3/00
Метки: способ, соединением, стыка, двух, устройство, образованного, труб, испытания
Формула / Реферат:
1. Способ испытания стыка (114, 214), образованного соединением двух труб (101, 102, 201, 202), содержащий стадии a) закрепления одной из труб (101, 201); b) приложения силы для смещения другой из труб (102, 202) относительно первой трубы (102, 202); и c) устранения воздействия силы; отличающийся тем, что способ дополнительно содержит стадию d) сравнения конечного положения другой трубы (102, 202) с положением, которое она занимала перед...
Скважинная струйная установка для испытания и освоения скважин
Номер патента: 4562
Опубликовано: 24.06.2004
Автор: Хоминец Зиновий Дмитриевич
МПК: F04F 5/02
Метки: скважинная, освоения, установка, испытания, скважин, струйная
Формула / Реферат:
Скважинная струйная установка для испытания и освоения скважин, содержащая пакер, колонну труб и струйный насос, в корпусе которого соосно установлены активное сопло с камерой смешения и выполнен проходной канал с посадочным местом для установки герметизирующего узла с осевым каналом, при этом установка снабжена излучателем и приемником-преобразователем физических полей, размещенным со стороны входа в струйный насос откачиваемой из скважины...
Скважинная струйная установка для испытания и исследования пластов и способ ее работы
Номер патента: 5510
Опубликовано: 24.02.2005
Авторы: Хоминец Зиновий Дмитриевич, Стенин Владимир Петрович
МПК: F04F 5/54, E21B 47/00
Метки: струйная, скважинная, пластов, испытания, исследования, работы, способ, установка
Формула / Реферат:
1. Скважинная струйная установка для испытания и исследования пластов, содержащая струйный насос, установленный на колонне труб в скважине с обсадной колонной, в корпусе струйного насоса соосно установлены активное сопло с камерой смешения и выполнен проходной канал с посадочным местом для установки герметизирующего узла с осевым каналом или сменных функциональных вставок с установленными под ними автономными приборами, выход струйного насоса...
Скважинная струйная установка для испытания и освоения скважин
Номер патента: 4563
Опубликовано: 24.06.2004
Автор: Хоминец Зиновий Дмитриевич
МПК: F04F 5/54
Метки: освоения, скважин, испытания, струйная, скважинная, установка
Формула / Реферат:
Скважинная струйная установка, содержащая пакер, колонну труб и струйный насос, в корпусе которого соосно установлены активное сопло с камерой смешения и выполнен проходной канал с посадочным местом для установки герметизирующего узла с осевым каналом, при этом установка снабжена излучателем и приемником-преобразователем физических полей, размещенным со стороны входа в струйный насос откачиваемой из скважины среды и установленным на кабеле,...
Предыдущий патент: Защита устройства промежуточного напряжения с индуктивной связью от переходных электрических процессов
Следующий патент: Платежная карточка и относящийся к ней способ
Случайный патент: Курительное изделие с прозрачным участком